
Active Contour Models & Active Shape Models & Active Shape...
33
Active Contour Models Active Contour Models & Active Shape Models & Active Shape Models (Snakes & Smart Snakes) (Snakes & Smart Snakes) Image Analysis Group Image Analysis Group Chalmers University of Technology Chalmers University of Technology
Transcript of Active Contour Models & Active Shape Models & Active Shape...

Active Contour ModelsActive Contour Models& Active Shape Models & Active Shape Models (Snakes & Smart Snakes)(Snakes & Smart Snakes)
Image Analysis GroupImage Analysis GroupChalmers University of TechnologyChalmers University of Technology

ContentsContents
• Motivation, applications and problem description
• Active Contour Models (Snakes)
• Active Shape Models (Smart Snakes)

ApplicationsApplications
Human-computer interaction
Lip-reading
Surveillance/speed control Face recognition

Applications Applications -- MedicalMedical
Heart in ultrasound
Blood vessels
3D brain
brain in MR

Applications Applications -- Our groupOur group
Spatio-Temporal Segmentation Boundary detection
Spray segmentation
Neural cells

ProblemProblem
20 40 60 80 100 120
20
40
60
80
100
120
20 40 60 80 100 120
20
40
60
80
100
120
The basic problem is to locate an object The basic problem is to locate an object in an image (segmentation, detection)in an image (segmentation, detection)

Part IPart I

Contents for ACMContents for ACM• Active Contour Models (Snakes)
– Contour representation– Contour Energy– Formulation– Discretization– Segmentation– Notes

Contour RepresentationContour RepresentationAlthough some curves can be represented explicitly by equations of the form: 0),( =yxf
01),( 22 =−+= yxyxf
When working with complex contours usually implicit and parametric representations are used
)(xfy =)cos(xy =
)();( syysxx ==E.g. an ellipse for example is represented by
[ ]ππ, ),sin();cos( −∈== ssbysax
or...
for a parameter s.
[ ] [ ]1 ,0 ,)()()( ∈= ssysxs Tv
s=0s=1
si=0.2
y
x
v(x(si) , y(si))
x(s)
s
y(s)
ssi=0.2
si=0.2

Assign low energy values to ‘good’ contours and high energy to ‘bad’ ones
Internal energyInternal energyIn natural objects we usually require smooth contours
High energy
Low energy
Internal Energy depends on the shape of the contour itself.
s∂∂v
small
tension in the contour,low internal energy
x(s)
s
x(s)
sHigh Low
2
2
s∂∂ vsmall
No bending in the contour, low internal energy
x(s)
s
x(s)
sHigh Low
Contour Energy Contour Energy -- InternalInternal

Contour Energy Contour Energy -- ExternalExternal
When locating an object in an image...External energyExternal energy
Look for high intensity gradient (watch out for noise - gradient of smoothed image)
External Energy is derived from the image data
High energy
Low energy
could have other than gradient e.g. intensity, termination, corners...
[ ]),( yxIG ∗∇ σ
image convolved with a smoothing (ex. Gaussian) filter.
IG ∗σ
σI(x,y) image intensity
parameter controlling the extent of the smoothing (ex. variance of Gaussian).
high Low external energy
Assign low energy values to ‘good’ contours and high energy to ‘bad’ ones

Contour Energy Contour Energy -- ExamplesExampleshigh-internal energyhigh-external energy (not smooth and away from target)
high-internal energylow-external energy(not smooth and close to target)
low-internal energyhigh-external energy(smooth and away from target)
low-internal energylow-external energy(smooth and very close to target)

FormulationFormulation
first two terms:internal stretching and bending forces the third term:external forces
∫
∫
=
∂∂+
∂∂=
+=
1
0
1
0
2
2
2
2
2
1
))(()(
)()()(
)()()(
dssP
dss
sws
sw
vv
vvv
vvv
β
α
βαξ
[ ]),(),( yxIGcyxP ∗∇−= σ
[ ] [ ]1 ,0 ,)()()( ∈= ssysxs Tv
Our problem is to find the contour that minimizes the total energy (internal+external) along the contour.
In accordance with the calculus of variations, the contour must satisfy vector valued partial differential (Euler-Lagrange) equation:
w1 and w2 control the tension and rigidity
( ) 0vvv =∇+
∂∂
∂∂+
∂∂
∂∂− ))((2
2
22
2
1 sPs
wss
ws
minimization � balance of forces

DiscretizationDiscretization
Require a discrete setting:
( ) ( )
( )( ) ( )
∑∫ →
−→∂
∂=→
+
ds
ssss
Niss
ii
i
L
Kvv
vvv
1
,,2,1 ;

SegmentationSegmentation•Deform an initial contour to one having less energy.•Apply forces that decrease the energy.
Tensile force
Flexural force
Inflation force
Image force
( ) ( ) ( )112 +− −−= iiii sss vvv( ) ( ) ( )1 12i i i is s sα α α− += − −
( ) ( )( )( ) iiii sysxIqF n,=
( )( )( )
−
≥+=
otherwise 1, if 1
,TyxI
yxIF
[ ]),(),( yxIGcyxP ∗∇−= σ
( )yxPpi ,∇=
v(si+1)
v(si)
v(si-1)
Search region
p,q: constantsni: unit vector normal
to the contour at si

NotesNotes
Disadvantages of manual segmentation:•Difficult to obtain reproducible results •Operator bias•Viewing each 2D-slice separately•Operator fatigue and time consuming
Types of deformable models/active contours:•snakes •deformable templates•dynamic contours
Extensions to basic Snakes:•Inflation force (makes snake less sensitive to initial conditions)•‘dynamic programming’ and ‘simulated annealing’ (search for global minima)•Region-based image features•Changing topology
Snakes/Active contour models/deformable contour:The contour is actively changing and deforming to have less energy(deformable ~ elasticity)

Part IIPart II

Contents for ASMContents for ASM• Active Shape Models (Smart Snakes)
– Observation– Overview– Shape representation– Considerations– Training ASM– Applying ASM– Extensions

Incorporate knowledge about the desired object in the snake model
Why use the same ‘Snakes’ to locate different types of objects?
Train the snake � smart snake
ObservationObservation

Shape training& gray level training
TRAINING
APPLICATIONsearch for the hidden objectarmed with training results
OverviewOverview

Shapes are represented by landmarks
x =
xyxy
xy
xy
k
k
1
1
2
2
16
16
M
M( , )x y16 16
Shape RepresentationShape Representation

Type of object to model
Example: faces
Collect images of the object
Locations of the
Landmarks
ConsiderationsConsiderations

Study the variations of the landmark positions
Training set of images
Labeling
Shapes represented by landmarks
Aligned shapes
Aligning
Now,we can...
Shape TrainingShape Training

Capture the main modes of variation of the landmark positions
A Shapethe
mean shape
weighted sum of different shape variation modes
2Lx1 2Lx1 2Lxt tx1
Shape TrainingShape Training Result Result -- PDMPDM
Using Principal Component Analysis (PCA) we obtain the...
Point Distribution Model (PDM)
L:number of Landmarks

Rotate, scalescale, and translateto minimizethe distance
between landmarks
AligningAligning

•3D pose•Expression•Identity (subject)
Causes of variations...
Variation modesVariation modes

[ ]Ttbbb 110 ... −=b
[ ]110 ... −= tpppP
Pbxx +=
x x==∑1
1Ni
i
N
Ti
N
i
iN
))((1
1
1
xxxxCx −−−
= ∑=
[ ]Tnn yxyxyx ,,...,,,, 2211=x
P is obtained from the eigenvectors of the covariance matrix (PCA)
Constrained, only allowable variations
The corresponding eigenvalues equal the variance explained by each variation mode
iii ppCx λ=
Shape Training EquationsShape Training Equations

Study the gray levels around the landmarks
Training set of images
Shapes represented by landmarks
Extract gray level profiles around landmarks
Labeling
Now,we can...
Gray Level TrainingGray Level Training

Summarize the information about the
Gray levels around landmarks
Each landmark Mean profilemean normalized derivative profile
Gray Level Training ResultGray Level Training Result
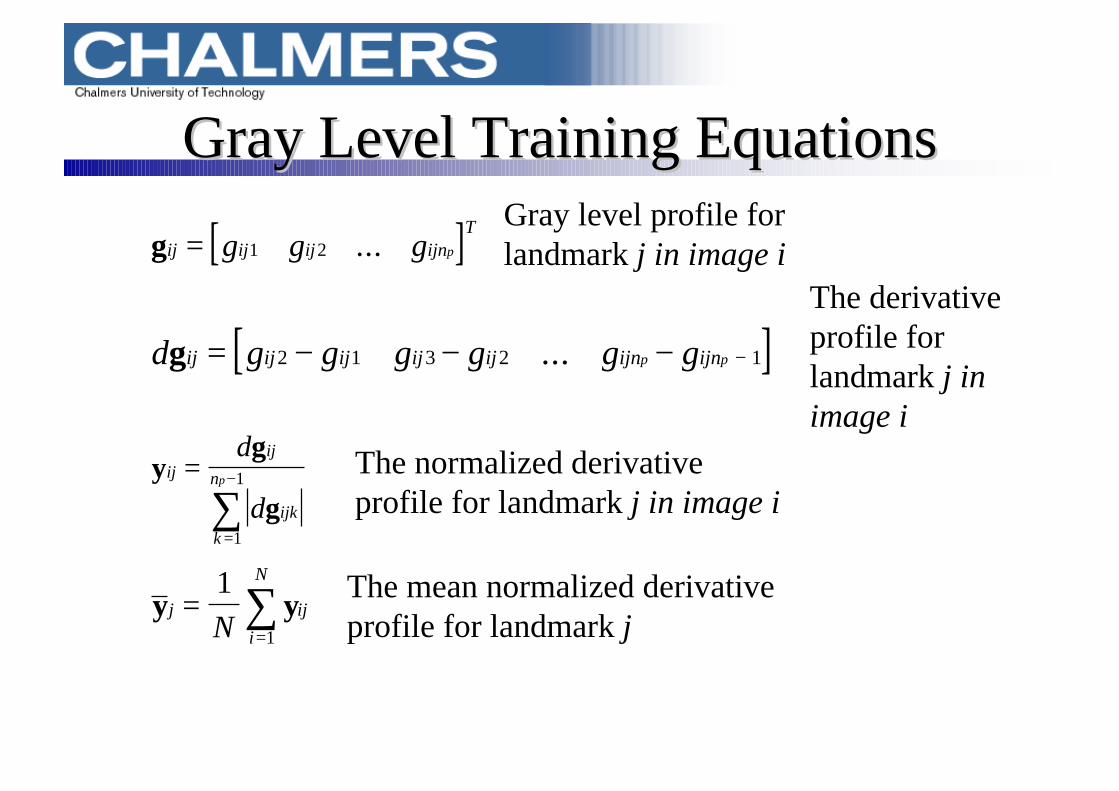
[ ]gij ij ij ijnT
g g g p= 1 2 ...
[ ]d g g g g g gij ij ij ij ij ijn ijnp pg = − − − −2 1 3 2 1...
yg
gij
ij
ijkk
n
d
dp=
=
−
∑1
1
y yji
N
ijN
==∑1
1
Gray level profile for landmark j in image i
The derivative profile for landmark j in image i
The normalized derivative profile for landmark j in image i
The mean normalized derivative profile for landmark j
Gray Level Training EquationsGray Level Training Equations

Using the shape and the gray level information to find instances of shapes in new images
Force only main modes of variation
Start with an initial shape
Search around landmarks for expected gray levelsand propose a new shape
Generally, an unallowable shapeis obtained
Find the required rotation, scaling, translation, and shape parameters updates needed to deform the current estimate to the proposed shape
Image SearchImage Search

NotesNotes
Extensions to ASMExtensions to ASM•Automatic landmark generation for PDMs•Multi resolution image search•Active Appearance Models (AAMs)•Genetic algorithms•Extension to 3D data•Other shape representations•Classification using ASM

ReferencesReferences• Image Processing, Analysis and Machine Vision. By
Sonka, Hlavac and Boyle. Second edition. PWS Publishing (pages 374-390).
• Snakes: Active Contour Models. Kass, Witkin and Terzopoulos. International Journal of Computer Vision. 1(4):321-331, 1987.
• Cootes, Taylor, Cooper and Graham. Active Shape Models - Their Training and Application. Computer Vision and Image Understanding January 1995, volume: 61, No. 1, page(s): 38-59.

















