
A New Special Protection Scheme for Power System Controlled … · 2020-01-20 · Sandeep Maram...
81
A New Special Protection Scheme for Power System Controlled Separation Sandeep Maram Thesis submitted to the faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering Dr. Lamine Mili, Chair Dr. Yilu Liu Dr. Virgilio A Centeno January 11, 2007 Falls Church, Virginia Keywords: Controlled separation, out-of-step blocking, transfer tripping, system separation, apparent impedance.
Transcript of A New Special Protection Scheme for Power System Controlled … · 2020-01-20 · Sandeep Maram...

A New Special Protection Scheme for Power System
Controlled Separation
Sandeep Maram
Thesis submitted to the faculty of the Virginia Polytechnic Institute and State University
in partial fulfillment of the requirements for the degree of
Master of Science
in
Electrical Engineering
Dr. Lamine Mili, Chair
Dr. Yilu Liu
Dr. Virgilio A Centeno
January 11, 2007
Falls Church, Virginia
Keywords: Controlled separation, out-of-step blocking, transfer tripping, system
separation, apparent impedance.

A New Special Protection Scheme for Power System
Controlled Separation
Sandeep Maram
ABSTRACT
A new power system controlled separation scheme is proposed to prevent the propagation
of cascading failures across a transmission network should it undergoes a major
disturbance, thereby reducing the possibility of a large-scale blackout. This scheme is
developed based on a set of conjectures, which state the following: (i) the locations of
out-of-step operations are independent of the severity and the location of the initial faults;
(ii) these out-of-step operations occur sequentially over a sufficiently long duration so
that relay blocking and transfer tripping can take place to minimize the load-generation
imbalance in the formed islands. To verify these conjectures, extensive dynamic stability
simulations are executed on a 30-bus and a 517-bus system, which exhibit characteristics
suitable for this study. Furthermore, we verify that these out-of-step operations do depend
on the prevailing system topology and the operating conditions.

iii
ACKNOWLEDGEMENTS
I would like to express my sincere thanks to my advisor Dr. Lamine Mili for his
continuous support and encouragement during the course my research work. He is an
excellent teacher and mentor to me and always guided me in taking correct decisions for
my academic and career growth. I am very grateful to him for giving me an opportunity
to work under his able guidance. I would like to express my sincere thanks to Dr. Yilu
Liu and Dr. Virgilio Centeno for their valuable comments and for serving as my advisory
committee members. Special thanks go to Mike Adibi of IRD Corporation for initiating
this research work, for his continuous encouragement, and for his valuable inputs from
time to time.

iv
TABLE OF CONTENTS Chapter 1 Introduction 1 1-1 Power system structure 2
1-2 Power system reliability 3
1-3 Operating states of a power system 4
1-4 Literature review 7
1-5 Research Contribution 9
1-6 Thesis organization 11
Chapter 2 Protective Relays 12 2-1 Fault clearing and reclosing 13
2-2 Distance relays 14
2-2-1 Impedance relays 15
2-2-2 Mho relay 17
2-2-3 Representation of Mho and Impedance Relays 17
2-3 Out-of-step blocking and tripping 18
2-3-1 Out-of-step relays 20
2-3-2 Ohm unit relays 22
Chapter 3 System Modeling 23 3-1 Synchronous machine modeling 23
3-1-1 Parks transformation 26
3-2 Exciter models 30
3-3 Governor and turbine models 32
Chapter 4 Methodology and simulation set up 35
4-1 Power system separation conjectures 35

v
4-2 Description of the 30-bus system 36
4-3 Description of the 517-bus system 37
4-4 Description of the software programs used for conducting the simulations 39
4-5 Description of the Simulation set up 40
4-6 Data clustering for power system separation 41
4-6-1 Hierarchical clustering 41
4-6-2 Partitioning clustering 43
4-6-3 Clustering methods applied to power system separation 44
4-7 Relay and apparent impedance representations 44
Chapter 5 Simulation Results 48
5-1 Simulations performed on the 517-bus system 48
5-1-1 Checking the out-of-step cascading effect 49
5-1-2 Effect of the initial fault locations on out-of-step operations 52
5-1-3 Effect of the fault intensities on the out-of-step operations 53
5-1-4 Effect of out-of-step blocking on tie-lines 54
5-1-5 Impact of changes in the loading conditions 56
5-1-6 Impact of the changes in network configuration 57
5-1-7 Impact of out-of-step blocking and tripping operations 59
5-2 Simulations performed on the 30-bus system 66
5-3 Weak link identification of a Network using a clustering method 67
Chapter 6 Conclusions 69 References 71

vi
LIST OF FIGURES Figure 1-1: Basic structure of a power system 2
Figure 1-2: Operating States in Power System 5
Figure 2-0: Step distance relaying functions for a complete line protection 15
Figure 2-1: Impedance Relay Characteristics 16
Figure 2-2: Impedance relay characteristics with three zones 17
Figure 2-3: Mho distance relay characteristics with fault impedance loci 18
Figure 2-4: Stable and Unstable Swings 19
Figure 2-5: Out of Step relay with circular characteristics 20
Figure 2-6: Out of Step Relay with Blinders (Ohm Unit Relay) 21
Figure 2-7: Swing Blocking Relaying 22
Figure 3-1: Schematic representation of a three-phase synchronous machine 24
Figure 3-2: Rotor and stator windings 25
Figure 3-3: Block diagram of the IEEE Type-1-excitation system 31
Figure 3-4: Block diagram of the IEEE Type-4-excitation system 31
Figure 3-5: Block diagram of the solid-fed-static exciter 32
Figure 3-6: The IEEE-standard-turbine-governor model 32
Figure 3-7: The hydro-turbine-governor model 33
Figure 3-8: The cross-compound-turbine governor model 33
Figure 3-9: The steam turbine governor model 34
Figure 4-1: One line diagram of reduced 30-bus system 37
Figure 4-2: Structure of the 517-bus system with four sub-systems connected by
tie-lines 38
Figure 4-3: Agglomerative and divisive type clustering techniques 42
Figure 4-4: k-means partitioning of 22 elements into 4 clusters around four
centroids 43
Figure 4-5: Apparent impedance path of line 135-136 46
Figure 4-6: Apparent impedance path of line 135-136 47

vii
Figure 5-1: Simulation result that illustrates the cascading effect 51
Figure 5-2: Apparent impedance paths for tie-line g-h 53
Figure 5-3: Apparent impedance path of tie-line e-f for different fault intensities 54
Figure 5-4: Impact on tie-line g-h of blocking the out-of-step relay of tie-line e-f 55
Figure 5-5: Light Load and Peak load case results (38 generators in operation) 56
Figure 5-6: Apparent impedance path for the two network configurations 59
Figure 5-7: Apparent impedance locus of tie-line e-f (blocked) and tie-line g-h 60
Figure 5-8: The transfer tripping operation performed on tie-lines f-h and e-g 61
Figure 5-9: Transient stability curves obtained on the reduced 30-bus system 66
Figure 5-10: Eleven clusters identified on the 30-bus system using k-means
clustering with mean silhouette value of 0.82 68

viii
LIST OF TABLES Table 2-0: Relay time and interrupting time for different line voltages 13
Table 2-1: De-ionization times for different line voltages 14
Table 3-1: Definitions of the variables and parameters of a synchronous machine 30
Table 4-2: 517-Bus system dynamic models 39
Table 5-1: Parameters of line 64-132 49
Table 5-2: Initial operating conditions for checking the cascading case 50
Table 5-3: Parameters of line 47-33 52
Table 5-4: Initial operating conditions for the light-load case 57
Table 5-5: Initial operating conditions for the reduced network 58
Table 5-6: Initial operating conditions for the out-of-step blocking and transfer
tripping simulation case 62
Table 5-7: Simulations results obtained using different initial fault locations 63 Table 5-8: Simulations results obtained using different initial fault intensities 64
Table 5-9: Simulations results obtained using different load levels 65

1
Chapter 1 Introduction
Electric energy is produced by electric power systems, which are critical infrastructures
whose service is vital to the economy of a nation. Providing continuous supply of electric
energy to meet the load demand is a complex technical challenge. It involves real-time
estimation of the system state together with the control and coordination of generating
units aimed at delivering in a secure manner electric power to the load. Consequently,
power system network security is a major concern worldwide. However, due to
deregulation, power systems are being operated closer to their maximum loadability. In
addition, environmental constraints hinder the expansion of the electric transmission
networks from meeting future demand growth. As a result, power systems are more
vulnerable to severe disturbances like faults on major pieces of equipment. Such
contingencies may result in cascading failures leading to large-scale blackouts. Therefore,
there is a need for new control schemes aimed at reducing this risk. It turns out that
controlled system separation is one good solution to this problem.
To prevent cascading failures from propagating further throughout a power
system, various controlled separation schemes have been proposed and installed by many
utilities. A good scheme reduces the impact of an outage on the customers and the
economy of the affected area while reducing the possibility of damage to equipment.
In this research work, we propose a new real-time controlled separation scheme
using current communication and protection systems. In the subsequent sections a brief
introduction to power systems structure, reliability and operating states are described;
then, the objectives and contribution of the thesis are presented and discussed.

2
1-1 Power System Structure
As depicted in Fig. 1.1, a typical power system consists of generation units, transmission
networks, distribution networks, and loads. The electric power is produced by
synchronous generators located at the power plants, which convert a primary source of
energy into electrical power [1], [2]. Typically, the voltage of the generated electric
power ranges from 10kV to 25kV. This voltage is then stepped up to higher voltage
levels ranging from 230kV to 765kV by means of step-up transformers. Next, the electric
power at these high voltages is transmitted through the transmission network. At the HV-
MV substations, voltages are stepped down to lower levels. There, the electric energy is
distributed to the load through primary and secondary distribution feeders depending
upon the customer energy needs. For instance, industrial customers that require large
amount of electric power are connected to the primary feeders while a host of domestic
users are connected to secondary feeders.
GeneratingStation /
Power Plant
GeneratorStep-Up
Transformer
Transmission Network(Transmission lines of
765, 500, 345, 230,138 kV)
SubstationStep-DownTransformer
SubtransmissionCustomer
26 kV and 69 kV
SecondaryCustomer
120 V and 240 V
PrimaryCustomer
13 kV and 4 kV
Figure 1-1: Basic structure of a power system.

3
1-2 Power System Reliability
A power system is said to be reliable when it is able to satisfy the power system load
requirements with an acceptable continuity of service at the contractual frequency and
voltage quality. Power system reliability can be sub-divided into two components,
namely, adequacy and security. Adequacy stands for the ability of the system to generate
sufficient power to meet the load demand at every instant of time. On the other hand,
security is defined as the ability of the system to cope with any abnormal disturbances,
which may be caused by short-circuits or unduly relay trippings that result in the loss of
major system components. For the sake of computational feasibility, security N-1 is the
only security level executed by both the power system planners and the control center
operators. Specifically, this function checks whether the system has enough reserve
margins in transmission and in generation to withstand the loss of a single piece of
equipment subject to both system equality and inequality constraints; the latter include
limits on the voltages and currents across the transmission network.
The North American Electric Reliability Council (NERC) and various Regional
Reliability Councils have developed system operating and planning standards. These
standards ensure reliable operation of a power system; they are based on the following
requirements [1]:
• A balance between the real power generation and the load demand should be
maintained continuously;
• An appropriate supply of reactive power should be provided so that the voltages
across the system are maintained within given stability and operational limits;
• The power flows across system transmission lines and transformers should be
monitored to ensure that thermal limits are not exceeded;

4
• The system should return to stability within a reasonable time following any
single contingency;
• A power system should be prepared for emergencies;
• A power system should be appropriately planned, designed and maintained so that
it meets the foregoing reliability criteria.
1-3 Operating States of a Power system
A reliable operation and control of a power system is a very complex technical challenge.
It involves the execution of functions such as real-time system monitoring and
contingency analysis. However, system responses to different disturbances are difficult to
predict accurately for all operating conditions. Therefore, major failures cannot be
prevented from occurring from time to time; hence, the need of corrective control
schemes to ensure system integrity under major contingencies.
In security analysis, system operating conditions can be classified into five
different states, namely normal, emergency, alert, in extremis, and restorative state [2]. In
this section, are presented and discussed all five states together with the associated
preventive and control actions that can be initiated under special conditions. Figure 1-2
depicts the five operating states along with the associated possible state transitions.
Normal and Secure State
During a normal operating state of a power system, both equality and inequality
constraints are satisfied. Equality constraints refer to the balance between system’s
generation and load while inequality constraints state that some system variables, such as
currents and voltages, remain within the normal operating range of the physical

5
equipment and satisfy system dynamic stability constraints [3]. However, while an
operating condition of a power system is normal with all the constraints being satisfied, it
may be secure or insecure. In the secure case, the system is capable to withstand a single
contingency without violating any of the operating constraints. The reserve margins for
the transmission and generation are sufficient to handle the loss of a single piece of
equipment. In the insecure case, the system is unable to cope with contingencies.
Figure 1-2: Operating States in Power System [2].
Alert State
In the alert state, a power system is considered to be insecure. System operators must be
alert and constantly keep monitoring equality and inequality constraints. However, in an
event of any contingency, the lack of reserve margins may result in the violation of some
inequality constraints, inducing a transition of the system into emergency state [3]. In that
instance, some equipment may be overloaded, that is, they may operate above their rated
capabilities. If the severity of the disturbance is very high, the system may change its
Normal
and Secure
Alert Restorative
Emergency In Extremis

6
state directly to the in extremis state when preventive actions are not taken in a timely
manner.
Emergency State
A power system enters an emergency state from an alert state when a contingency occurs
in the system. During emergency conditions, the voltage levels fall below the stability
limits at various buses and the emergency ratings of system components are exceeded
due to overloading, implying that the inequality constraints are violated. The system can
be restored back to the alert state by initiating effective control strategies such as fault
clearing, fast valving, exciter control, generation tripping, and load shedding [3].
In Extremis State
When effective control measures are not applied to a power system operating in an
emergency state, the system will enter in an in-extremis state. Here, both the equality and
inequality constraints are violated [3]. A system settling in an in-extremis state may
undergo cascading outages, which may result in the formation of disconnected islands
while inducing major disruption in service, that is, brownouts or blackouts [2]. Controlled
system separation and load shedding are few actions that may be taken to prevent the
occurrence of major failures and ensure least disruption in service.
Restorative State
This state indicates that control actions are being implemented, which aim at restoring the
integrity of the power system via the sequential connection of the disconnected parts,
including the system load. Depending on the existing operating conditions, the system
may transit from this state to the alert state or the normal state.

7
1-4 Literature Review
Typically, major power system blackouts have been initiated by local disturbances that
cascaded across the transmission networks. Significant studies were performed to
understand their causes. It can be inferred that major power system contingencies
typically comprise three phases depending on their duration: the initial phase where
temporary system faults occur, which is rapidly cleared in milliseconds; the intermediate
phase where the system separates in seconds into undesirable parts; and the final phase
where load and generation imbalance causes in minutes a blackout [5]. Incidents of major
blackouts that took place in various nations have been reported in the literature [6] – [11].
Since the late 1990’s, power systems have been pushed closer to their limits,
resulting in a growing risk for a local failure to cascade into a large-scale catastrophic
blackout. The most common triggering fault of such an event is a short-circuit that
occurs on high voltage or extra-high voltage transmission lines of the system. At the
inception of a disturbance, the relays located on faulty transmission lines operate to clear
the fault. This induces variations of the electrical power generator outputs while the
generator mechanical inputs remain almost constant. The resulting effect of this power
imbalance is the formation of groups of coherent generators operating at different speeds,
swinging one against the others. Eventually this may lead to a loss of synchronism and
the splitting of the network. However, the islands so formed may not have a balance in
generation and load, which makes the failure to propagate further until a complete
collapse of the system. To prevent such events to occur, utilities have installed special
protection schemes based on under-frequency and under-voltage relays that perform load
and generation shedding and line tripping.
After a thorough analysis of the blackouts that struck the North-West of the
United States in summer 1996, Taylor [6] revealed their causes and proposed remedial
actions to prevent them from occurring in the future. In France, Counan et al. [8] studied

8
the behavior of the French electric system under multiple contingencies. They
recommended the use of curative actions such as load shedding based on frequency
criteria together with system separation induced by local relays trigged by generator loss
of synchronism.
Currently, controlled separation schemes have been implemented mainly in
elongated and isolated power systems to split the system along pre-determined
boundaries, e.g., the East – West boundary in Bangladesh [9]. They have been planned
based on simulations executed under various forecasted load conditions and contingency
scenarios. A more general separation scheme was proposed by Vital et al. [10]; the
authors apply the normal form method to the Manitoba-Hydro power system to determine
groups of machines that swing coherently against each other following a small
perturbation. The boundaries separating coherent generator groups are identified and
tripped to form islands [10]. If these islands are deemed to be not stable, then various
techniques such as load shedding, generation curtailment, relay tripping, are implemented
[6]-[11].
You et al. [12]-[13] propose a power system separation scheme aimed at creating
islands subject to load-generation balance via load shedding based on the rate of
frequency decline. This approach consists in using a slow coherency method to detect
clusters of coherent generator groups, the boundaries of which provide desirable locations
of separation. It involves power system modeling followed by the execution of a
computationally efficient method based on graph theory and pattern recognition. The
method seeks to determine the locations and the timing of system separation. This
approach assumes the availability of real-time wide-area phasor measurements.
Sun et al. [14]-[15] introduce a new two-phase and three-phase system separation
method based on ordered binary decision diagrams (OBDD). Here, the primary focus is
to ensure that the equality and inequality constraints are satisfied in all the islands formed

9
under a single contingency. This approach involves the implementation of complex
search algorithms that require the knowledge of the system operating states to find the
desirable splitting locations.
In summary, we may say that the special protection schemes installed so far by
the utilities are costly and require the implementation of complex tools for the real-time
estimation and assessment of system operating conditions. Consequently, there is a need
for the development of simpler and more cost effective methods of system separation.
The aim of this research work is precisely to meet this need.
1-5 Research Contribution
The main outcome of this research work is the development of a new and simple power
system controlled separation scheme aimed at preventing cascading events from
propagating further across a transmission network, thereby reducing the possibility of
large-scale blackout. It is a simple procedure that makes use of existing protective and
communication systems to detect the appropriate locations of system separation and to
initiate controlled system islanding with minimal load-generation imbalance [4]. The
proposed method generalizes and broadens the industry’s practice on corrective action
implemented during a power system disturbance, which may result in the loss of large
generating units and/or the outages of major transmission lines.
In the proposed method, out-of-step relays are placed across the network and are
continuously monitored at the control center. After the initial fault has occurred, the
system state varies depending on the severity of the fault. Under major disturbances, out-
of-step relays may trip depending upon whether the prevailing swing impedance locus
passes through their respective tripping zones. However, this relay tripping may result in
the break up of the system into islands with an imbalance of generation and load. In that

10
event, a relay blocking and transfer tripping is performed so that islanding occurs with
minimal generation-load imbalance. Arming of these out-of-step relays are updated from
time to time or in response to significant changes that may occur in the system topology
and the loading conditions.
The proposed method assumes that the power system consists of clusters of
machines connected via few tie-lines. Furthermore, it relies on the validity of a set of
three conjectures that will be described in Chapter 4. Briefly, these conjectures state that
the locations of out-of-step operations depend on the network topology and loading
conditions but not on the fault location and intensity. Also, it states that there is a
sufficient time-lag between two successive out-of-step operations so that appropriate
corrective actions can take place. Specifically, during a normal operation, at any given
time, the system separation scheme proceeds as follows:
1. Select a collection of out-of-step relays strategically located across the
transmission network to perform the splitting of the power system at desirable
locations. This splitting is performed only when a disturbance causes the apparent
impedance loci to enter the out-of-step relay tripping zones;
2. Determine the probable locations where out-of-step operation may occur and
identify a large collection of transmission lines whose outages can split the system
into islands based on the current network topology and loading conditions;
3. From the identified collection of transmission lines, make an appropriate selection
of out-of-step relays that will separate the system into islands having minimal
load and generation imbalance via the execution of out-of-step relay blocking and
transfer tripping operations.

11
1-6 Thesis Organization
Chapter 2 is devoted to the description and operation of various protective relays such as
distance relays, impedance relays, out-of-step relays, to cite a few. Furthermore, it
explains the implementation of a relay-blocking-and-transfer-tripping scheme by means
of out-of-step relays. Chapter 3 deals with the modeling of a synchronous machine, its
exciter and governor and provides all the block diagrams of the associated models.
Chapter 4 provides the statement of the proposed three conjectures that constitute the
basis of the current research work and gives the complete description of the test systems
developed to verify them. Furthermore, it outlines various data clustering concepts and
methodologies and advocates their application to the Z-bus matrix of a power
transmission network to identify its weak links. Chapter 5 analyzes the simulation results
that are obtained by carrying out dynamic stability studies on a 30-bus and 517-bus test
system. Chapter 6 summarizes the conclusions drawn from this research study.

12
Chapter 2 Protective Relays
In power systems, relays are used to detect abnormal power system conditions that arise
due to faults in the system by a continuous monitoring of various system variables such
as voltages, power flows, power injections, and system frequency [2]. Most protective
relays are used to detect and disconnect an element of the power system that is
functioning outside its normal range. The aim of relays used for protecting various
elements in the system is to provide high dependability and security. A relay that operates
correctly for all the faults, for which it is designed to respond to, is said to have high
dependability. A relay that does not operate incorrectly for any fault is said to have high
security [16]. Relays that are used in transmission line protection are of primary interest
in this research work. These relays are used to clear the faults by controlling the opening
and closing of circuit breakers when a fault occurs in the system. It is very essential that
the relaying schemes employed is able to discriminate between normal loading
conditions, swing conditions, out-of-step conditions and fault conditions [17], [18].
Tripping during stable power swings and faults due to improper functioning of relays
may eventually lead to a total system collapse. Major disturbances that occurred in the
past such as the 1965 Northeast blackout, the blackouts that struck the Western part of the
USA during summer 1996, the North America blackout of August 2003 were the results
of undesirable relay tripping.
During transient conditions, relay actions play a critical role. It is very essential
that a strategy is followed to avoid the splitting of the system at undesirable locations,
which may result in the formation of islands having imbalanced load and generation. Out-
of-step relaying has been installed to perform tripping and blocking operations when out-
of-step conditions are detected in the system. In the current chapter we discuss various
distance relays, out-of-step relays and their usage in performing blocking and tripping
operations.

13
2-1 Fault Clearing and Reclosing
When a fault occurs on a piece of equipment of a system, it is essential that it is detected
by the associated protection relays and eliminated via the opening of the circuit breakers
under the relay supervision [2]. Following a fault, the electric power output of the
generators varies while the mechanical input to the generators remains practically
constant, inducing a change in the generator speed and thereby, a change in the frequency
of the system. The effect of this frequency change depends on the fault duration [17].
The fault clearing time is the sum of the relay time (also referred to as fault
detection time), the signal transmission time and the time required by the circuit breakers
to open. On the other hand, the relay time and the interrupting times depend on the
transmission line voltages [17]. Generally, higher the line voltage, shorter is the fault
duration since the relays used for high voltages are faster. Table 2.0 shows the relay time
and the interrupting time used for different line-voltage levels. Note that the time is
expressed in cycles of 60 Hz.
Table 2.0: Relay time and interrupting time for different line voltages [17].
The time elapsed from the instant the breaker initiates the trip until the time when the
breaker contacts re-close constitutes the reclosing time. The reclosing time is much
longer for high and extra-high voltage lines as the de-ionization time is longer. Table 2.1
shows the typical de-ionization time for different line voltages in cycles of 60 Hz.
Line Voltage Relay Time
in Cycles of 60 Hz
Interrupting Time
in Cycles of 60 Hz
≤ 69 kV 1 – 3 8
≥ 115 kV 1 – 3 5
230 kV ¼ - 1 3
345 kV ¼ - 1 2

14
Table 2.1: De-ionization times for different line voltages [17].
Line Voltage
in kV
Minimum De-ionization
Time( in Cycles)
69 6
115 8.5
138 10
230 18
345 20
2-2 Distance Relays
Distance relays are the main devices used for the transmission line protection. In current
use, popular distance relays are impedance relays, reactance relays, mho relays, modified
mho and modified impedance relays [2]. Distance relays trip when the impedance
between the relay location and the fault location, measured as the ratio of measured
voltage phasor to measured current phasor, is less than the relay setting [2]. Distance
relays, which utilize local information such as currents and voltages, employ time
intervals in order to discriminate between faults that occur internally and externally to the
protected zone. The characteristic of a distance relay is well understood from the R-X
plane diagrams (See Figure 2.1 and Figure 2.2). The relay operation takes place when the
measured impedance falls within the relay characteristics, which depend on the parameter
to which the distance relay is set to respond to. It is circular for impedance relays and
horizontal for reactance relays.
Distance relays basically protect three different zones for a given transmission
line. Zone 1 is typically set between 85% and 90% of the line length over which the relay
operates instantaneously. Zones 2 and 3 are adapted for back-up protection of the line. In
these two zones, a timer initiates coordination delays that allow the primary protection to
operate first. Specifically, the coordination delay for Zone 2 is usually of the order of 0.3
seconds. The reach of Zone 2 is generally set from 120% to 150% of the line length. Care

15
is taken that Zone 1 of the neighboring line is operated before Zone 2 for a line being
protected. Regarding Zone 3, it usually extends to 120% to 180% of the neighboring line
section. It is important that Zone 3 coordinates in time and distance with Zone 2 of the
neighboring circuit. Usually the operating time for Zone 3 is set at 1.0 second [16]. The
zones expressed in distance relaying for 100% line protection are displayed in Figure 2.0.
Figure 2-0: Step distance relaying functions for a complete line protection [16].
2-2-1 Impedance Relays
A relay that operates on the basis of a voltage to current ratio is called an impedance
relay [19]. This ratio is also known as the apparent impedance seen by the relay [17]. The
relay operates when the magnitude of the apparent impedance is less than the value for
which the relay is set to operate. This type of relay detects faults in all four quadrants of
the R-X plane. Therefore, directional elements are unutilized for this type of relays. A
typical impedance relay has a timer, a directional element, and three impedance elements.
In order to protect the three zones, all three impedance elements are set to operate for

16
different impedance values, each at different time interval, should a fault occur on the
transmission line under their supervision.
As displayed in Figure 2.1, the tripping characteristic of a simple impedance relay
with impedance elements and timer is a circle centered at the origin. Whenever the value
of the apparent impedance falls within the radius of the circle, the relay operates. On the
other hand, the characteristic of the directional element is a straight line passing through
the origin while being perpendicular to the line of maximum torque [17]. With the
presence of a directional element, the tripping area is defined as that falling within the
circle and above the straight line. The characteristic of an impedance relay with a
directional element and zones is shown in Figure 2.2.
Figure 2-1: Impedance relay characteristics [2].
R
jX
Z

17
Figure 2-2: Impedance relay characteristics with three zones [17].
2-2-2 Mho Relay
Mho relay detects faults only in one direction thanks to the availability of three zone
elements and a timer. Note that directional elements are not needed. The third zone
impedance element can be adjusted to induce an offset characteristic for back-up
protection purpose. Note that generally, mho relays are used for protection of long lines.
2-2-3 Representation of Mho and Impedance Relays
Let us consider a transmission line, termed for short Line A-B, of length L with voltages
EA and EB, current IAB, and impedance ZAB , all in per unit. The apparent impedance ZA is
given by [17]
ZA = EA / IAB, (2.1)
= EA / ((EA – EB) / ZAB), (2.2)
= RA + j XA, (2.3)

18
Figure 2-3: Mho distance relay characteristics with fault impedance loci [17].
Consider the three zones of an impedance relay, namely Zone 1, 2, and 3. For
Zone i, where i = 1,2, 3, let ri denotes the radius of the tripping characteristic of the ith
element and let Ri and Xi denote the coordinates of the center in the impedance plane of
this element. Then, the distance between the apparent impedance ZA and the center of the
ith zone is given by
di = ((RA – Ri )2 + ( XA – Xi )2)1/2 . (2.4)
When di – ri ≤ 0, the timer di starts counting. On the other hand, when dti ≥ ∆Ti, Relay i
operates and the associated circuit-breaker clears the fault at dti = ∆Ti + ∆T0. Here, ∆Ti
denotes the relay time for each element i according to the zone standards while ∆T0
denotes the breaker time at line end A.
2-3 Out-of-step Blocking and Tripping When the steady state equilibrium of a power system is disturbed due to a fault,
generators start swinging with respect to one another, which may result in the operation
of distance relays. Improper detection of unstable swings by protection relays may result

19
in the opening of transmission lines. The unstable and stable power swings are shown in
Figure 2.4. Control actions are typically initiated to bring the system back into stable
equilibrium using protective measures. For instance, when unstable swings occur due to
the loss of synchronism (out-of-step) between two groups of generators, these
fluctuations may be dampened by separating the coherent machines into different groups,
also called coherent areas [17]. The separation should be so that: (1) there is a minimal
load and generation imbalance in each separated area; (2) critical load is protected; (3)
power system is brought back to secure state as soon as possible.
Figure 2-4: Stable and unstable swings [18].
During out-of-step conditions, it is essential that the relays do not trip during
stable swings while allowing the tripping to occur during unstable conditions.
Furthermore, it may be necessary to block some of the relays from tripping where
splitting is not desirable and to initiate relay tripping where separation is desirable.
Therefore, it is required to identify strategic locations where the splitting of the system
should occur. To meet these requirements, it is important for the relaying schemes to
distinguish between normal loading conditions, swing conditions, out-of-step conditions
and fault conditions. It turns out that the above requirements can be met by out-of-step
relays strategically located across the transmission.
Unstable
Stable
Time
Angle
δo

20
2-3-1 Out-of-Step Relays
Out-of-step relays have multiple characteristics. First, they effectively identify out-of-
step conditions due to an incipient loss of synchronism. Second, they perform out-of-step
blocking or tripping depending upon whether the swing is stable or unstable. The
decision is made based on the rate-of-change of the locus of the apparent impedance
during system instability. For a stable swing, this rate-of-change is slow whereas for an
instable swing, it is quick. To do this detection, out-of-step relays comprise two relays
having circular or vertical characteristics in the R-X plane [2]. The relay characteristics
are circular when impedance relays are used and vertical when mho relays are used. As
depicted in Figure 2.5 and Figure 2.6, if the time required by the apparent impedance
locus to cross the two characteristics (buffer area) exceeds a specified value, then the out
of step function is initiated.
Figure 2-5: Out-of-step relay with circular characteristics [16].

21
Figure 2-6: Out-of-step relay with blinders (Ohm unit relay) [4].
Obviously, an out-of-step blocking scheme is needed to control the tripping of
distance relays in order to avoid improper system splitting during out-of-step conditions
that exhibit heavy swings. The relays that may trip at undesirable locations are blocked
whereas the other out-of-step relays are allowed to trip [17]. As displayed in Figures 2.5
and 2.6, the blocking action can be achieved by surrounding the tripping area with
concentric impedance relays or mho relays forming a buffer area. Under fault condition,
the apparent impedance passes gradually through the buffer area into the tripping area
[17]. If the time taken by the apparent impedance to cross the buffer area is equal or
greater than the pick-up time, ∆T, of the auxiliary relay associated with the out-of-step
relay, then the auxiliary relay operates to block the tripping of the relay. The pick up time
of the blocking relay is about ¼ to 1 cycle. The signal transmission time for the transfer,
which is generally the transmission of ‘yes’ or ‘no’ signal to the desirable location, is also
¼ to 1 cycle while the circuit-breaker’s opening time is about 1½ to 2 cycles. Therefore,
as the apparent impedance crosses the buffer area between the blinders, there are about 2
to 4 cycles available to block the out-of-step tripping action and to transfer the tripping to
other locations [4].

22
2-3-2 Ohm Unit Relays
Also known as angle impedance relays, ohm unit relays have linear characteristics, which
make these relays suitable for the protection of long transmission lines where early
tripping need to be prevented to allow larger swings to occur. Indeed, these relays are
equipped with blinders to control the tripping actions during out-of-step or swing
conditions. As shown in Figure 2.7, the angular range of distance relays can be controlled
and narrowed to any desired lower angles. The fault impedance locus is the shaded area
between the two lines at angles 600 and 750. The apparent impedance path or swing-
impedance locus is drawn intersecting the line impedance at various swing angles. The
distance relays normally used without blinders will trip for swing angles ranging from
900 to 2400, whereas the distance relays when used with blinders will trip for swing
angles ranging from 1350 to 1950 [4]. The circular characteristic characterizes the tripping
area boundary while the blinders define the angular range.
3000
1950
600
1350
180"
2400
900
OPE
N
BLINDER
CLOS
EOP
ENCLO
SE
BLIN
DER
CLOSE
OPEN
750
600
FAULT
LOCUS
SWIN
G
LOCUS
jX
R
δ
i
j
Figure 2-7: Swing blocking relaying [4].

23
Chapter 3 System Modeling 3-1 Synchronous Machine Modeling In a power plant, a synchronous generator is used to convert the mechanical energy
provided by the turbine on the shaft to electrical energy that is injected into the power
system. A synchronous machine mainly consists of two elements, the stator and the rotor.
Armature windings are placed on the stator and operate at high voltages while the field
windings are mounted on the rotor and are energized by DC-current. The three-phase
windings of the armature are distributed symmetrically around the air gap with 120
electrical degrees apart in space [2]. A synchronous machine may have several damper
windings mounted on the rotor. The rotor may be either cylindrical or have salient poles
depending upon the speed at which the machine has to be operated. Figure 3.1 shows the
schematic representation of a three-phase synchronous machine with one pair of field
poles [2].
The dynamic equations that govern a synchronous machine rotation are developed
under several assumptions, which are as follows [2] [19]:
• stator windings have equivalent sinusoidal distribution along the air gap;
• magnetic hysteresis and magnetic saturation effects are negligible;
• the relationship between the flux linkages and currents must reflect a conservative
coupling field;
• the relationships between the flux linkages and the current are independent of the
shaft angle, shaftθ when expressed in dqo -coordinate system.

24
Figure 3-1: Schematic representation of a three-phase synchronous machine [2].
A p-pole three-phase synchronous generator with three armature windings and
one field winding is described next. The circuit shown in Figure 3.2 is used to derive the
equations of the generator. In this particular case, the machine is assumed to be provided
with one damper winding along the d-axis and two damper windings along the q-axis.
The relation between the mechanical angle, shaftθ , and the electrical angle, eθ , is given by
2e shaftpθ θ= , (3.1)
where subscripts notation being used denote the following: a, b, c represent stator phase
windings, fd denotes field windings, 1d denotes d-axis damper winding, 1q and 2q
represent the q-axis damper windings.

25
Figure 3-2: Rotor and stator windings.
The electrical equations of the windings present in the synchronous machine as shown in
Figure 3.2 can be obtained using Kirchhoff’s voltage law. The voltage equations of the
armature, field and damper windings are expressed as follows 19]:
aa a s
dv i rdtλ
= + , (3.2)
bb b s
dv i rdtλ
= + , (3.3)
c
c c sdv i rdtλ
= + , (3.4)
fd
fd fd fd
dv i r
dtλ
= + , (3.5)
1
1 1 1d
d d ddv i rdtλ
= + , (3.6)
1
1 1 1q
q q q
dv i r
dtλ
= + , (3.7)

26
2
2 2 2q
q q q
dv i r
dtλ
= + . (3.8)
The torque equation can be written as
2m e f
dJ T T Tp dt ω
ω= − − . (3.9)
where, J is the inertia constant, Tm is the mechanical torque applied to the shaft in the
direction of rotation, Te is the electrical torque which is opposing the mechanical torque ,
ω is the rotor angular velocity, and Tfw is the friction windage torque.
3-1-1 Park’s Transformation
We have represented the electrical and mechanical equations of a synchronous machine
in which the different variables and parameters have been expressed in the stator a-b-c
reference frame. In this reference frame, Eqs. (3.2) – (3.9) contain inductances terms that
are time variant and are dependent on the electrical angle θe. This time dependence
introduces difficulties in the modeling of a synchronous machine [2].
In order to make the inductances time independent with constant values
irrespective of the electrical angles, a synchronously rotating d-q-o reference frame is
used instead. At synchronous speed, this d-q-o reference frame is fixed with respect to the
rotor. The transformation from the stator to the d-q-o reference frame is called Park’s
transformation, which is given by

27
2 23 3
2 2 23 3 3
1 1 12 2 2
dqo
sin sin( ) sin( )
T cos cos( ) cos( )
π πθ θ θ
π πθ θ θ
⎛ ⎞− +⎜ ⎟⎜ ⎟⎜ ⎟= − +⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
. (3.10)
The new variables are obtained by projecting the actual variables on three axes,
namely, the direct axis (or axis d), which is along the main axis of the field winding, the
quadrature axis (or axis q), which is along the neutral axis of field winding, and lastly the
stationary axis (or axis o). The inverse transformation is given by
1
12 2 13 3
2 2 13 3
dqo
sin cos
T sin( ) cos( )
sin( ) cos( )
θ θπ πθ θ
π πθ θ
−
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟= − −⎜ ⎟⎜ ⎟
+ +⎜ ⎟⎝ ⎠
. (3.11)
Therefore, we can write the equations of the synchronous machine in the d-q-o reference
frame as follows [19]:
d
d s d qdv r idtλωλ= − + , (3.12)
q
q s q d
dv r i
dtλ
ωλ= + + , (3.13)
o
o s odv r idtλ
= + , (3.14)
fd
fd fd fd
dv r i
dtλ
= + , (3.15)

28
11 1 1
dd d d
dv r idtλ
= + , (3.16)
1
1 1 1q
q q q
dv r i
dtλ
= + , (3.17)
2
2 2 2q
q q q
dv r i
dtλ
= + , (3.18)
where the flux linkages are expressed as
1 1d ls md d sfd fd s d d( L L )i L i L iλ = + + + , (3.19)
1 132fd sfd d fdfd fd fd d dL i L i L iλ = + + , (3.20)
1 1 1 1 1 132d s d d fd d fd d d dL i L i L iλ = + + , (3.21)
1 1 2 2q ls mq q s q q s q q( L L )i L i L iλ = + + + , (3.22)
1 1 1 1 1 1 2 232q s q q q q q q q qL i L i L iλ = + + , (3.23)
2 2 1 2 1 2 2 232q s q q q q q q q qL i L i L iλ = + + , (3.24)
o ls oL iλ = . (3.25)
The torque equation in the d-q-o reference frame is written as
( )2 32 2m d q q d fw
dw PJ T i i Tp dt
λ λ⎛ ⎞⎛ ⎞= + − −⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
. (3.26)
All the variables involved in the equations given by (3.1) to (3.25) are expressed in actual
units. They must be converted to per units when they are encoded in a software program.

29
The scaled transient reactance, sub-transient reactance, and time constants are given by
[19]
11 1d ls
md lfd
X ' X
X X
= ++
, (3.27)
11 1q ls
mq lfd
X ' X
X X
= ++
, (3.28)
1
11 1 1d ls
md lfd l d
X " X
X X X
= ++ +
, (3.29)
1 2
11 1 1q ls
mq l q l q
X " X
X X X
= ++ +
, (3.30)
fddo
s fd
XT '
Rω= , (3.31)
1
1
qqo
s q
XT '
Rω= , (3.32)
11
1 11 1do l d
s d
md lfd
T " XR
X Xω
⎛ ⎞⎜ ⎟⎜ ⎟= +⎜ ⎟+⎜ ⎟⎝ ⎠
, (3.33)
22
1
1 11 1qo l q
s q
mq l q
T " XR
X Xω
⎛ ⎞⎜ ⎟⎜ ⎟= +⎜ ⎟+⎜ ⎟⎝ ⎠
. (3.34)
Table 3.1 provides the definitions of the various parameters and variables involved in
Eqs. (3.12) to (3.34).

30
Table 3-1: Definitions of the variables and parameters of a synchronous machine. Parameter/Variable Definitions
dv , qv armature d-axis, q-axis terminal voltages
vfd , v1d ,v1q ,v2q d-axis, q-axis field and damper winding voltages
rs armature phase resistance
rfd , r1d , r1q , r2q d-axis, q-axis field and damper winding resistances
dλ , qλ armature flux in d-axis, q-axis
1 1 2fd d q q, , ,λ λ λ λ d-axis, q-axis field and damper winding fluxes
id , iq armature d-axis, q-axis terminal currents
ifd , i1d , i1q, i2q d-axis, q-axis field and damper winding currents
Lls armature phase leakage inductance
Lmd , Lmq d-axis, q-axis magnetizing inductances
Xd , Xq d-axis, q-axis synchronous reactances
X’d , X’q d-axis, q-axis transient reactances
X”d , X”q d-axis, q-axis sub-transient reactances
T’do , T’qo d-axis, q-axis transient open circuit time constants
T”do , T”qo d-axis, q-axis sub transient open circuit time constants
3-2 Exciter Models
Exciters are used to provide direct current to the synchronous machine field winding. In
addition, they allow the operator to control the reactive power injected in the power
system by controlling the field current [2]. Exciters can be classified into three types,
namely DC excitation systems, AC excitation systems, and static excitation systems.
In order to ensure proper controlling and protective measures, exciters are
equipped with power system stabilizers, voltage regulators, limiters, and protection
relays. Figures 3.4, 3.5 and 3.6 depict the various exciter models of the generators that are
connected to the 30-bus system and the 517-bus test system, which are the test systems
on which the simulations are carried out.

31
Figure 3-3: Block diagram of the IEEE Type-1-excitation system [21].
Figure 3-4: Block diagram of the IEEE Type-4-excitation system [21].

32
Figure 3-5: Block diagram of the solid-fed-static exciter [21].
3-3 Governor and Turbine Models Prime-mover-governing systems control the synchronous machine speed and thereby,
modulate the generated real power of the machine [2]. Prime mover provides the
mechanical energy required to drive the shaft of a synchronous machine while the
governors are used to control the speed of the shaft via the change in the gate/valve
position. A speed error signal, which is calculated by comparing the recorded speed at the
shaft to a desired value, is used to determine the new gate/valve position.
The 30-bus and the 517-bus test systems use steam-turbine-governor models and
hydro-turbine-governor models as depicted in Figures 3.6, 3.7, 3.8 and 3.9.
Figure 3-6: The IEEE-standard-turbine-governor model [21].

33
1
1 + T fs1 + T rs
rT rsc 1
1 + T gs
VAR(L)
nref
speedSPEED
+
-
+
+
R
∑
∑
g
q
X
h
q x At
x
Dturb
SPEED
+-
qNL
∑∑ ∑+ -
+
1
Velocity and position limits
g
PMECH+_
1T ws
Figure 3-7: The hydro-turbine-governor model [21].
1/R1 + sT1
∑
ReferenceVAR(L)
+
_
PMAX
PMIN = 0
1 + sFT5
(1+sT3)(1+sT4)(1+sT5)∑
High Pressure Unit(DH)(ET-HP)2
+
-
1/R1 + sT1
∑-
PMAX
PMIN=0
1 + sFT5
(1+sT3)(1+sT4)(1+sT5)
(-DH)(ET-HP)2
+_
∑PMECHLP
PMECHHP
∑
Low Pressure Unit
SPEEDLP
SPEEDHP
ReferenceVAR(L+1)
++
-
Figure 3-8: The cross-compound-turbine governor model [21].

34
Figure 3-9: The steam turbine governor model [21].

35
Chapter 4
Methodology and simulation set-up
4-1 Power System Separation Conjectures
The proposed system separation approach that is described in Chapter 1 is based on the
validity of the following three conjectures, which assume that the topology of the power
system consists of clusters of machines connected by few tie-lines [4]:
Conjecture # 1:
• The location of loss-of-synchronism (i.e. out-of-step operation) depends on the
current system topology and the prevailing power system network operating
conditions and does not depend on the location and the intensity of the initial
faults. Furthermore, under a prevailing network configuration and loading
condition, only limited out-of-step operations may take place in the system, which
may require the initiation of blocking and transfer tripping operations.
Conjecture # 2:
• The out-of-step operations take place sequentially. This means that an out-of-step
operation does not occur at multiple locations simultaneously. Furthermore, the
time interval between successive occurrences is sufficient to allow the initiation
of appropriate out-of-step blocking and transfer tripping operations.
Conjecture # 3:
• During normal operating conditions, at any given time, there are several locations
that can split the power system into separate parts connected by tie-lines with
light power flows which are the weak links of the system. Transfer tripping

36
operation can be made to these weak links in order to create islands with a
minimal load and generation imbalance, resulting in least disruption of service.
In order to verify the above conjectures, we perform simulations on two test
systems that are suitable for transient stability simulations. Furthermore, they have been
developed so that they experience transient and dynamic stability problems under a single
contingency. They will be described in the subsequent sections.
4-2 Description of the 30-bus test system
The 30-bus system includes three steam-electric plants, six hydro-electric plants and one
synchronous condenser. It is obtained after a dynamic reduction of an actual 50-bus
system [4]. The one-line diagram of this system is shown in Figure 4.1. It consists of the
interconnection of two systems operating at two voltage levels. Buses 109 and 135
through 142 operate at the 230-kV voltage level while the other buses operate at the 110-
kV voltage level. A two-winding transformer located between Buses 108 and 109 and a
three-winding transformer located between Buses 135 and 127 are interconnecting the
two sub-systems. The central transmission loop constitutes a metropolitan area where
most of the system load is concentrated. Two steam units are present near this load
center. This system serves a total load power of 650 MW.
The 30-bus system is loosely connected, which makes it more prone to stability
and uncontrolled separation problems when a severe disturbance occurs. This
characteristic makes this system suitable for the various simulations required to verify the
three conjectures stated in Section 4.1. The initial locations of out-of-step relays are
pinpointed by performing numerous simulations and by identifying the weak links in the
system using a clustering technique. The locations of the initial contingencies are
represented by cross-marks in the one-line diagram depicted in Fig. 4.1. The suspected
and monitored sites for out-of-step operation are indicated by M1, M2, M3 and M4. The

37
dynamic models used in developing the reduced 30-bus system are the round rotor
generator model (GENROU), the IEEE type-1 excitation system model (IEEEX1), the
IEEE standard governor model (IEEESGO), the steam turbine governor model (TGOV1)
and the hydro-governor model (HYGOV). Ten generators, ten exciters and ten governors
were modeled using these representations.
Figure 4.1: One line diagram of the reduced 30-bus system.
4-3 Description of the 517-bus test system
The 517-bus system consists of the interconnection of four tightly connected sub-systems
via short 500-kV and 345-kV transmission lines. It is obtained after reducing a 640-bus
system [4]. It includes 38 generators of cross-compound, tandem and combustion turbine
types. The 640-bus system serves a 22,000-MW load by means of 92 generating units
spread across 24 power plants. The latter consist of thermal stations connected to the
system via relatively short inter-tie lines.

38
Due to its inherent structure, the 517-bus system is fairly stable as compared to
the 30-bus system. It has been observed that for many major blackouts in the past such as
the 1965 Northeast Blackout, the 1997 New York Blackout, and the 2003 US-Canada
Blackout, the network separation occurred at tie lines present within the system or
between the interconnections [1], [5], and [21]. Therefore, this 517-bus system turns out
to be suitable for conducting various transient stability simulations aimed at studying the
validity of the three foregoing conjectures. It is observed that the power flows over the
tie-lines take very different magnitudes for various operating conditions of the system.
Note that the four sub-systems constituting the 517-bus are either generation rich or load
rich under different operating conditions. The turbine-generator dynamic models used for
this system are given in Table 4.2
Figure 4.2: Structure of the 517-bus system with four sub-systems connected by tie-lines.

39
Table 4.2: The 517-bus system dynamic models.
92 Generators - Round Rotor Generator Model (GENROU)
64 Exciters - IEEE Type 1 Excitation System (IEEEX1)
20 Exciters - IEEE Type 4 Excitation System (IEEEX4)
8 Exciters – Solid Fed Static Exciter (SCRX)
36 IEEE Standard Governor (IEEESGO)
36 Combustion Turbines: Governor (TGOV1)
20 Cross Compound Turbines : Governor (CRCMGV)
4-4 Description of the software programs used for conducting
the simulations
In this research work, the following software programs were used to conduct various
dynamic stability and power flow simulations: (i) the Extended Transient-Midterm
Stability Program (ETMSP), (ii) the Interactive Power Flow (IPFLOW), and (iii) the
Interactive Output Analysis Program (OAP) simulation package, all three sold by Electric
Power Research Institute (EPRI).
IPFLOW is a comprehensive power flow program that allows us to perform
steady-state calculation of a power system. This program uses the static power flow
model of a system to determine the power flows on each transmission line, the power
injection and the voltage magnitude and phase angle at every network node [22]. The
program also has a graphical user interface, making it very user friendly.
ETMSP is a state-of-the-art dynamic stability program that allows us to analyze
power system dynamics following contingencies placed in the system. Various power
system parameters can be monitored during the entire duration of the simulations. The

40
software program includes numerous models of power system devices. The program
utilizes the IPFLOW output as the base case for the calculations it performs [22].
4-5 Description of the Simulation Set-up
The simulations are carried out as follows. First, we prepare the input data files of the
30-bus and the 517-bus systems for the ETMSP and IPFLOW programs. Then, we run
various dynamic stability simulations on these two test systems by placing on each of
them three-phase faults (initial faults) with different fault clearing durations. In each
case, we sequentially execute the following three steps:
Step 1: Identify possible out-of-step operation locations by continuously monitoring the
path taken by the apparent impedance of the transmission lines;
Step 2: Identify possible out-of-step locations by monitoring the frequency response of
the generators (swing curves). These locations may be the tie-lines connecting
coherent groups of generators that swing against each others.
Step 3: Verify the independence of the out-of-step operations with respect to the location
and severity of the initial fault.
To verify the dependence of out-of-step operations on system topology and load
conditions, we modify the topology and the load levels of both the 30-bus and the 517-
bus system and repeat the above three steps. From the results obtained in Step 2, we
check whether there is any time interval between the various out-of-step operations that
occur in the system after the placements of three phase faults in the system. Then, we
verify the second conjecture, which states that out-of-step operations occur sequentially
with adequate time interval to allow transfer tripping operations. Finally, we determine
all the possible locations that can split the power system into islands that are
approximately balanced in load and generation.

41
In the subsequent sections, we will describe the clustering techniques that are
used to identify the initial out-of-step relay operations. Furthermore, we will describe the
relay and apparent impedance representations that are being used.
4-6 Data Clustering for Power System Separation
Data clustering is the process of grouping data that exhibit a certain degree of similarities.
It is a collection of techniques of statistical data analysis that can be applied in different
fields such as bioinformatics, image processing, pattern recognition, data mining, and
machine learning, to cite a few. Clustering can be grouped into two broad classes of
methods, namely, un-supervised and supervised clustering methods [23]. In Un-
Supervised clustering the clustering is done on the un-labeled samples while in the
supervised clustering the data samples are distinct. Un-supervised clustering can be
broadly classified into: (1) Hierarchical Clustering; and (2) Partitioning Clustering.
4-6-1 Hierarchical clustering
A popular class of clustering techniques that achieve un-supervised clustering consists of
hierarchical methods. These methods can be of two types, namely agglomerative or
divisive type. Figure 4.3 illustrates the principles that underline each clustering type. The
procedures of the agglomerative type start by assuming that each element in the dataset
forms a separate cluster. In the subsequent steps, the two closest (most similar) clusters
are merged when the distance (similarity) that separates them is smaller than a given
threshold [24]. The cluster merging process continues until all the elements are
encapsulated into one single cluster.

42
Figure 4.3: Agglomerative and divisive type clustering techniques
What distinguishes an agglomerative algorithm from another one is the different
distance (similarity) that each of them uses. Indeed, a distance may be defined in many
different ways; for instance, it may be defined as the shortest distance, or the farthest
distance, or the average of all the distances among every possible pair of elements
belonging to two distinct clusters, yielding different methods termed single linkage, or
complete linkage, or average linkage agglomerative clustering methods, respectively
[24]. In all cases, groups of clusters with minimum dissimilarities are merged together at
different stages of the algorithm.
A very different approach is being used by the divisive hierarchical methods.
Here, all the elements are first considered to belong to one single cluster. Then, this mega
cluster is broken down successively into smaller and smaller clusters until there is only
one element left over in each cluster.
1
2
3
4
1, 2
3, 4
1, 2, 3, 4
Agglomerative clustering
Divisive clustering

43
4-6-2 Partitioning Clustering
A popular partitioning clustering method is the k-means clustering. This method
classifies a given set of elements into a fixed number of mutually exclusive clusters, say k
clusters [24]. One of the requirements is that the clusters so formed should have at least
one element. To this end, the algorithm proceeds as follows. First, it randomly chooses k
centroids, one for each of the k clusters. Then, the remaining data elements are assigned
to their nearest centroid [23]. When no element is left over, the initial grouping of
elements is completed. Next begins an iterative process where the centroids of the
clusters are sequentially recalculated and all the clustering procedure re-executed until
the centroid locations do not change anymore.
It is clear that a good partitioning technique should form clusters that contain
elements that are very dissimilar from those belonging to the other clusters. This is done
through the execution of silhouette plots. A cluster having larger silhouette value is
considered to be well separated from the elements in the neighboring clusters.
Figure 4-4: k-means partitioning of 22 elements into 4 clusters around four centroids.
centroids centroids

44
4-5-3 Clustering Methods Applied to Power System Separation
For a given large-scale power system containing thousands of buses, a huge dataset can
be generated and grouped into different clusters of highly connected buses, which are
related to each other via few tie-lines, termed weak links of the network. From a graph-
theoretic viewpoint, these weak links are the minimal cut-sets of the network. Recall that
a minimal cut-set is defined as the minimal collection of links which, when cut, split the
graph into two disconnected sub-graphs [25]. Unfortunately, a graph-theoretic approach
suffers from two major drawbacks; it does not carry information about either the
parameters or the loading conditions of the branches of the transmission network. To
overcome these weaknesses, we may use instead the elements of the Jacobian matrix of
the system power flow model as measures of the electrical distances between buses.
In this research work, we carry out a preliminary study by using the elements of
the Z-bus matrix instead. The latter provides information about the branch parameters,
but not of the branch loading conditions. By applying clustering techniques to the Z-bus
matrix, the weak links of the network may be identified as those branches that have their
ending buses in two different clusters. These identified weak links are expected to be the
locations where out-of-step operation may occur when a disturbance affects the power
system.
4-7 Relay and Apparent Impedance Representations
In order to detect the possible out-of-step operations when a disturbance occurs in the
system, it is required to track the path taken by the apparent impedance at various bus
locations. An out-of-step operation is considered to occur when the apparent impedance
locus enters the tripping area of the relay present on the monitored transmission line. In
this thesis, the apparent impedance and relay characteristics representation have been
simplified by expressing relay tripping area and apparent impedance in per unit on the

45
basis of individual line impedance [4]. Specifically, the new apparent impedance Z0 is
expressed as
Z0 = Zi / Zij ,
where, Zi is the apparent impedance at the ith bus and Zij is the line impedance connecting
the ith bus to the jth bus. Z0 represents a position in the R0 + jX0 plane. The relay-tripping-
area boundary is formed by the line impedance, Zij, being approximately equals to Zi.
When the path taken by the apparent impedance Z0 falls below the line impedance value
of 1.0 p.u., then the relay operates and trips the line under its control. Figure 4.5 shows
the apparent impedance Z0 locus movement in the R0-X0 plane at Bus 136 for Line 136-
135 of the reduced 30-bus system depicted in Figure 4.1. This locus size increase is due
to a three-phase fault on one of the two parallel lines connecting Bus 127 to Bus 129. It
can be seen that the path taken by the apparent impedance locus that is recorded by the
out-of-step relay present on Line 136-135 varies in magnitude once the fault is cleared.
As displayed in Figure 4.5, the locus movement is towards the tripping area of the relay
represented by a circle. We observe that in this case, the apparent impedance does not
enter the tripping area of the out-of-step relay.
The process has been further simplified in Figure 4.6. Here, the magnitude of the
apparent impedance, Z0, is plotted against time for the same contingency simulation as
described above. The out-of-step relay trips if the value of Z0 falls below 1.0 p.u.. This
representation of the apparent impedance locus and relay tripping area on the basis of line
impedance helps to identify the out-of-step locations in a very simple manner.

46
Figure 4.5: Apparent impedance path of line 135-136.
0
1
2
3
4
5
6
0 1 2 3 4 5 6 7 8Ro in p.u
Legend:F = Fault on Line 127-129FC = Fault ClearedR = Successful ReclosureSimulation = 1.0 sec
F = 0.1- sec
F = 0.1+ sec
FC = 0.2- sec
FC = 0.2+ sec
R = 0.45 - sec
R = 0.45+ sec
Simulation Ends 1.0 sec
Line Impedance
t = 0.75 sec
Xo in
p.u
.

47
Figure 4.6: Apparent impedance path of Line 135-136.
0
1
2
3
4
5
6
7
8
9
10
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Time in seconds
Zo in
p.u
.
F -
F +
Relay Tripping Zone
FC -
FC +
R -R +
Simulation Ends
Legend:F =Fault on Line 127-129FC=Fault Cleares (Breakers open)R =Reclosure (Breakers close)Simulation 1.0 sec

48
Chapter 5 Simulation Results To verify the validity of the three conjectures stated in Section 4.1, simulations are
performed on the 30-bus and the 517-bus systems for different contingency scenarios.
These conjectures describe the effect of fault location, fault intensity, loading conditions
and network-configuration on the location of the out-of-step operations that may occur in
a power system.
The three conjectures are verified in the following order. First, the existence of a
time delay between the occurrences of two out-of-step operations, called cascading
effect, is demonstrated. Next, the out-of-step blocking and transfer tripping scheme is
studied; this provides the rational behind the proposed controlled separation scheme.
Finally, this scheme is applied to the 30-bus and 517-bus systems to evaluate its ability to
split a network into generation-load balanced parts.
5.1 Simulations performed on the 517-bus system
A complete description of the 517-bus system is given in Section 4.2. As depicted in
Fig. 4.2, this system is made up of four subsystems, namely, Subsystem E, F, G, and H;
the latter are connected pair-wise via Tie-Lines e-f, e-g, g-h and f-h. Various
contingency scenarios were simulated on Subsystem E while locations M1, M2, M3 and
M4 were monitored for out-of-step operations. The contingencies for which results were
recorded are described in the subsequent sections. These simulations are categorized
according to the conjectures that are being assessed.

49
5.1.1 Checking the Out-of-step Cascading Effect
Simulations were carried on the 517-bus system to verify the second conjecture, which
states that out-of-step operations occur sequentially when a disturbance is applied to the
system. The system has a power plant sited at Bus 65, which consists of a 450-MVA
generator connected to a 500-MVA step-up transformer hooked at Bus 64. The total
system load and generation are 21,630 MW and 22,100 MW, respectively. A 35-degree
phase-shifting transformer is present between Tie-Line f-h at the receiving end.
The parameters of Line 64-132 are given in Table 5.1 while those of the tie-lines
are shown Table 5.2. In Table 5.1, V is the bus voltage expressed in kV and in per unit
while the bus angle θ is given in degrees at the “from bus” end; P and Q are respectively
double-circuit line active and reactive power flows in MW and MVAR at the “from bus”
end; R, X and B are the single-circuit line resistance, reactance, and shunt susceptance,
respectively, all expressed in per unit on the 230-kV voltage basis and the 100-MVA
system basis. Table 5.2 gives the values of the tie-line power flows and of other
parameters.
Table 5.1: Parameters of Line 64-132.
V
(kV)
V
(p.u)
θ
(°)
P
(MW)
Q
(MVar)
R
(p.u.)
X
(p.u.)
B
(p.u.)
230
1.037
-4.5
122.2
15.4
0.0049
0.0304
0.0570

50
Table 5.2: Initial operating conditions for checking the cascading case.
Tie
V
(kV)
V
(p.u)
θ
(°)
P
(MW)
Q
(MVar)
R
(p.u.)
X
(p.u.)
B
(p.u.)
e-f
345
1.002
-21.7
-56.0
-51.1
0.006318
0.067500
1.15830
e-g
500
0.998
-35.0
110.6
-67.7
0.000567
0.011025
0.78300
g-h
345
1.058
-14.1
400.8
-46.9
0.006318
0.067500
1.15830
f-h
500
1.060
-2.5
-342.7
-30.4
0.000567
0.011025
0.78300
One typical simulation result is depicted in Figure 5.1. In this case, a three-phase
fault was applied adjacent to Bus 64 on one of the 230-kV double transmission lines
connecting Bus 64 to Bus 132. The fault was placed at 0.1 second and was cleared at
0.25 second. Therefore, the total fault duration lasted 9 cycles on the 60-Hz basis. The
circuit breakers on both ends of the single-circuit transmission line operated
simultaneously to open and re-close the line at 0.5 seconds. Consequently, the total
reclosing duration was 15 cycles. The resulting apparent impedance locus is displayed in
Figure 5.1. It can be seen that the apparent impedance at Bus e of Tie-Line e-f has
entered the relay tripping zone at time 0.605 second while that at Bus g of Tie-Line g-h
has entered the relay tripping zone at time 1.185 second. Consequently, there is a time
interval of 0.58 second, or approximately 35 cycles, between the two out-of-step

51
operations monitored at points M1 and M2. Therefore, we conclude that the out-of-step
operations do occur with sufficient time interval between two successive out-of-step
operations, depicting a cascading behavior. During this time interval, necessary relay
blocking and transfer-tripping operation can be performed to split the system into
disconnected parts having each a minimal load-generation imbalance.
Figure 5.1: Simulation result that illustrates the cascading effect.
0
2
4
6
8
10
12
14
16
18
20
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5Time in seconds
Zo in
p.u
.
Legend:
F = Fault on Line 64-132 in E-System FC = Fault Clears R = Breakers Reclose
e-f Tie trips at 0.605 sec.
e-f Tie Tripps g-h Tie trips
R
R
FC
FC
F
g-h Tie
e-f Tie
Relay Tripping Zone
g-h Tie trips at 1.185 sec. or 35 cycles later

52
5.1.2 Effect of the Initial Fault Locations on Out-of-step Operations
A series of simulations were carried out on the 517-bus system for different initial fault
locations to demonstrate the first conjecture given in Section 4.1. The latter states that
the location of the out-of-step operation is independent of the locations of the initial
faults.
Figure 5.2 depicts the results of two simulated cases. In both cases, two identical
three-phase faults were applied and the apparent impedance paths for all the four tie-lines
were monitored. In the first simulated case, a fault was placed adjacent to Bus 64 on one
of the 230-kV double-circuit transmission line connecting Bus 64 to Bus 132. In the
second simulated case, a fault was placed adjacent to Bus 47 on one of the 230-kV
double circuit transmission line connecting Bus 47 to Bus 33. To Bus 47 is connected
Power Plant #48 sited in System E. The parameter values for Lines 64 -32 and 47-33 are
shown in Table 5.1 and Table 5.3, respectively. In both simulated cases, the initial fault
was placed at time 0.1 second and cleared at 0.25 second, yielding a fault-duration of 9
cycles. The reclosing duration was 12 cycles and 15 cycles for the first and second
simulation cases, respectively.
Table 5.3: Parameters of Line 47-33.
V
(kV)
V
(p.u)
θ
(°)
P
(MW)
Q
(MVar)
R
(p.u.)
X
(p.u.)
Bs
(p.u.)
230
1.032
-6.2
344.1
108.2
0.00920
0.09800
0.04770

53
It can be seen from Figure 5.3 that the apparent impedance paths for Tie-Line g-h
enters the tripping area of the out-of-step relay at 1.30 seconds in the first simulated case
and at 1.26 seconds in the second simulated case. Therefore, it can be inferred that for
different initial fault locations with the same fault duration, it is Tie-Line g-h that is
subject to out-of-step operations [4].
Figure 5.2: Apparent impedance paths for Tie-Line g-h.
5.1.3 Effect of the Fault Intensities on the Out-of-step Operations
A series of simulations were carried out on the 517-bus system for fault intensities to
demonstrate the first conjecture given in Section 4.1. The latter states that the location of
the out-of-step operation is independent of the severity of the initial faults.
0
2
4
6
8
10
12
14
16
18
20
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5
Time in seconds
Zo in
p.u
.
Legend:F1 = Fault on Line 64-132 in E-System F2 = Fault on Line 47-33 in E-System F1C & F2C = Faults clear in 0.15 sec ( 9 cycles )R1 = Reclosure after 12 cyclesR2 = reclosure after 15 cyclesg-h Tie trips with F1 at 1.30 sec.g-h Tie tips with F2 at 1.26 sec.
Relay Tripping Zone
F1 & F2
F1C & F2C
R1
R2
g-h Tie Trips for F2
g-h Tie Trips for F1

54
Figure 5.3 displays the apparent impedance paths of two simulated cases with a
three-phase fault placed on one of the double-circuit Line 64-132 that is adjacent to
Bus 64 in the 517-bus system. The fault-clearing-time period was 9 cycles for the first
simulated case and 12 cycles for the second simulated case. In both cases, the reclosing
period for the circuit breakers was 15 cycles while the apparent impedance path for Tie-
Line e-f entered the tripping area of the out-of-step relay at 0.615 second. From
Figure 5.3, it can be inferred that the location of the out-of-step operation always occurs
on Tie-Line e-f for all simulated fault intensities, hence verifying the first conjecture.
Figure 5.3: Apparent impedance path of Tie-Line e-f for different fault intensities. 5.1.4 Effect of Out-of-step Blocking on Tie-lines A series of simulations were executed on the 517-bus system to verify the second
conjecture stated in Section 4.1. To this end, we study the impact of blocking a tripping
operation by means of out-of-step relays.
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.00 0.20 0.40 0.60 0.80 1.00 1.20 1.40 1.60
Time in seconds
Log
(Zo)
in p
.u. o
n Li
ne's
Z
Legend:
F1 & F2 = Faults on Line 64-132 in E-System F1C = Fault Clears in 0.15 sec ( 9 cycles )F2C= Fault Clears in 0.2 sec ( 12 cycles )R1 & R2 = Reclosure after 15 cyclese-f Tie trips at 0.615 - sec.e-f Tie trips at 0.615+ sec.
F1 & F2
F1C F2C
R1 R2
Zone

55
Figure 5.4 illustrates this impact on Tie-Line e-f. Here, the initial operating
conditions together with the initial fault location are the same as those of the contingency
case described in Figure 5.1. In Figure 5.4, we observe that Tie-Line e-f trips at time
0.605 second while Tie-Line g-h trips at time 1.185 seconds since at these times, the
apparent impedance locus enters the relay tripping area. In the simulated cases, the out-
of-step relay on Tie-Line e-f tie is armed. This relay recognizes the out-of-step operation
and blocks the relay from tripping Tie-Line e-f. Subsequent to the out-of-step blocking
operation, the out-of-step relay located on Tie-Line g-h, which is not armed, trips Tie-
Line g-h at time 1.26 seconds.
Figure 5.4: Impact on Tie-Line g-h of blocking the out-of-step relay of Tie-Line e-f.
0
2
4
6
8
10
12
14
16
18
20
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5
Time in seconds
Zo in
p.u
.
Legend:F = Fault on Line 64-132 in E-System FC = Fault ClearsR = Reclosuree-f Tie trips at 0.615 sec.g-h Tie trips at 1.260 sec. or 40 cycles later
e-f Tie is Blocked
g-h Tie Allowed to Trips
F
FC
FC
R
R
Relay Tripping Zone

56
5.1.5 Impact of Changes in the Loading Conditions A series of simulations were carried out on the 517-bus system to demonstrate that the
location of out-of-step operation depends on system loading conditions. To this end,
these simulations were performed under peak load and light load operating conditions
without altering the network configuration and without changing the number of operating
generators in the system. The total system load was 21,630 MW for the peak-load case
and 17,300 MW for the light-load case. A total of 38 generators were operating to
provide 22,100 MW and 17,640 MW in the first and second case, respectively. Table 5.2
and Table 5.4 give the initial operating conditions for the tie-lines for both cases. From
Figure 5.5, it can be inferred that Tie-Line g-h trips at time 1.26 seconds when the system
was operating under the peak-load condition and it does not trip under the light-load
operating condition. These results clearly demonstrate that the location of out-of-step
operation depends on system loading conditions.
Figure 5.5: Light Load and Peak load case results (38 generators in operation)
0 2 4
6 8
10 12
14 16 18 20
22 24
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5
Time in seconds
Zo in
p.u
.
F
FC
R
Peak-Load
Light-Load
g-h Tie Trips
g-h Tie Doesn't Trip
Legend:F = Fault on Line 64-132 in E-System FC = Fault ClearedR = breakers ReclosedUnder Peak-Load, g-h Tie Trips at 1.260 sec.Under Light-Load, g-h Tie Doesn't Trip
Relay Tripping Zone

57
Table 5.4: Initial operating conditions for the light-load case
Tie
V
(kV)
V
(p.u)
θ
(°)
P
(MW)
Q
(MVar)
e-f
345
1.072
-12.4
-192.7
-35.4
e-g
500
1.071
-22.7
172.8
-73.6
g-h
345
1.102
-8.3
165.6
-45.8
f-h
500
1.102
8.3
-188.4
-54.1
5.1.6 Impact of the Changes in Network Configuration The impact of changes in network configuration on the location of out-of-step operation
was studied by executing few simulations. Figure 5.6 shows the results obtained for two
different simulated cases. In these cases, the network configuration is different. In the
first case, 38 generators producing 17,640 MW are serving a total system load of
17,300 MW. The initial operating conditions for the first case are similar to those of the
light-load case shown in Table 5.4. Both the total system load and power generation are
reduced by 20% when compared to the peak-load case of Section 5.1.5. In the second
simulated case, the total number of generators present in the network is reduced to 24.
The initial operating conditions of the tie-lines for this case are shown in Table 5.5. The

58
steam units along with the combustion units present in the system have been shut down
but the total load and power generation are kept to the same level as those of the first
case.
It can be observed from Figure 5.6 that the apparent impedance locus recorded for
Tie-Line e-f for the simulated case with 38 generators is quite different from the second
case with 24 generators. In the second case, the apparent impedance path enters the
tripping area of the relay while in the first case, it does not. Consequently, we infer that
the location of out-of-step operation depends on the network and/or generation
configuration.
Table 5.5: Initial operating conditions for the reduced network
Tie
V
(kV)
V
(p.u)
θ
(°)
P
(MW)
Q
(MVar)
e-f
345
1.061
-8.9
-280.8
-6.1
e-g
500
1.068
-11.9
40.8
-68.7
g-h
345
1.198
-4.4
85.0
-33.6
f-h
500
1.193
15.2
-168.
-57.2

59
Figure 5.6: Apparent impedance path for the two network configurations. 5.1.7 Impact of Out-of-step Blocking and Tripping Operations Figures 5.7 and 5.8 display the results of the simulations that are executed to illustrate
out-of-step blocking and transfer tripping schemes. In this simulation, the total generation
capacity of the E-system and G-system of the 517-bus test system is 10% more than those
of Systems F and H. The initial operating condition for this simulation case is shown in
Table 5.6. In this simulation case, the initial three-phase fault is placed on one of the
double-circuit lines present that are adjacent to Bus 64 for a period of 9 cycles. From the
results obtained in the earlier sections, we can infer that Tie-Line e-f trips at around 0.6
second followed by Tie-Line g-h, which trips around 1.185 seconds or 35 cycles later.
Consequently, the system splits into two unbalanced parts. Therefore, in order to avoid
such system separation, the out-of-step tripping and blocking scheme is initiated.
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.2 0.4 0.6 0.8 1 1.2 1.4 Time in seconds
Log(
Zo) i
n p.
u.
Legend:F = Faults on Line 64-132 in E-SystemFC = Faults ClearedR = Breakers Reclosede-f Tie Under Light-Load Condition with 38 Generators.e-f Tie Under Same Load Condition but with 24 generators
38 GeneratorsLight-Load
24 GeneratorsSame Load
F
FC
Relay Tripping Zone
R

60
As shown in Figures 5.7 and 5.8, the tripping of Tie-Line e-f is blocked while the
tripping is transferred to out-of-step relays located on Tie-Lines e-g and f-h. Because Tie-
Line g-h does not trip, the 517-bus system separates into two balanced parts.
The simulation results displayed in Tables 5.7, 5.8 and 5.9 are those obtained by
applying on the 517-bus system of the contingency scenarios that are described in
Sections 5.1.2, 5.1.3, and 5.1.5, respectively. These simulations demonstrate the validity
of the three conjectures stated in Section 4.1, which are related to the impact on out-of-
step operations of the fault location, fault intensity, and the network loading levels.
Figure 5.7: Apparent impedance locus of Tie-Line e-f (blocked) and Tie-Line g-h.
0
5
10
15
20
25
30
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5
Time in seconds
Zo in
p.u
.
Legend:F = Faults on Line 64-132 in E-System FC = Faults ClearedR = Breakers Reclosede-f Tie Blocked 0.6 sec.g-h Tie doesn't trip.
The effect of f-h & e-g Ties tripping
on g-h Tie
F
FC
FC R
R
e-f Tie
g-h Tie
Relay Tripping Zone
Blocked

61
Figure 5.8: The transfer tripping operation performed on Tie-Lines f-h and e-g.
0
0.5
1
1.5
2
2.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Time in seconds
Log
(Zo)
in p
.u.
Legend:F = Fault on Line 64-132 in E-SystemFC = Fault Clears (Breakers Open)R = Breakers Reclosee-f Tie Blocked and e-g Tie Opens at 0.6 sec. e-f Tie Blocked and f-h Tie also opens at 0.6 sec. g-h Tie Does'n Trip
e-g Tie Tripsat 0.6 sec
f-h Tie Tripsat 0.6 sec.
F1 & F2
F1C & F2C
R1
R2

62
Table 5-6: Initial operating conditions for the out-of-step blocking
and transfer tripping simulation case.
Tie
V
(kV)
V
(p.u)
θ
(°)
P
(MW)
Q
(MVar)
e-f
345
0.997
-25.9
133.0
-70.8
e-g
500
0.957
-38.5
426.7
-46.6
g-h
345
1.055
-12.7
229.2
-31.7
f-h
500
1.067
-20.0
-144.3
-47.4

63
Table 5-7: Simulation results obtained using different initial fault locations. Beginning
of
Simulation
Initial
Fault
Location
Fault
Clearing
Circuit-
breaker
Reclosing
Tie-line
Tripping
End
of
Simulation
Cycles on
the
60-Hz basis
0
6
15
30
37
90
Z0 in p.u.
of
Tie-Line e-f
23.9
16.6
2.0
1.3
1.0
0.7
Cycles on
the
60-Hz basis
0
6
15
27
35
90
Z0 in p.u.
of
Tie-Line e-f
23.9
16.6
1.2
1.4
1.0
0.8

64
Table 5-8: Simulation results obtained using different initial fault intensities. Beginning
of
Simulation
Initial
Fault
Location
Fault
Clearing
Circuit-
breaker
Reclosing
Tie-line
Tripping
End
of
Simulation
Cycles on
the
60-Hz basis
0
6
15
21
76
90
Z0 in p.u.
of
Tie-Line g-h
16.2
12.6
10.5
14.3
1.0
0.8
Cycles on
the
60-Hz basis
0
6
18
21
71
90
Z0 in p.u.
of
Tie-Line g-h
15.9
12.6
10.0
16.4
1.0
0.5

65
Table 5-9: Simulation results obtained using different load levels. Beginning
of
Simulation
Initial
Fault
Location
Fault
Clearing
Circuit-
breaker
Reclosing
Tie-line
Tripping
End
of
Simulation
Cycles on
the
60-Hz basis
0
6
15
21
76
90
Z0 in p.u.
of
Tie-Line e-f
16.2
12.6
10.5
14.3
1.0
0.8
Cycles on
the
60-Hz basis
0
6
15
21
60
90
Z0 in p.u.
of
Tie-Line e-f
11.5
11.2
7.5
9.7
1.0
7

66
5.2 Simulations Performed on the 30-bus System
A series of dynamic stability simulations were carried out on the reduced 30-bus system,
which is displayed in Figure 4.1. In this figures, cross-marks indicate the locations where
the initial three-phase faults were placed. Out-of-step operations were monitored on
points M1, M2, M3 and M4.
Figure 5.9 displays the swing curves of several generating plants after placing a
three-phase fault on one of the parallel lines connecting Bus 139 to Bus 140. In this
simulation, the initial three-phase fault was placed on the system at 0.1 seconds. The fault
was cleared at 0.2 seconds by the opening of the circuit-breakers located on both ends of
the faulted Line 139-140. The line was renergized by reclosing the circuit-breakers at
0.5 seconds. It can be seen that two generating units, namely Gen-138-Hydro and Gen-
142-Hydro, had high accelerating speeds with respect to the others. This led to the
splitting of the system at Line 136-135, resulting in the formation of unbalanced load-
generation islands.
Figure 5-9: Transient stability swing curves obtained on the reduced 30-bus system.
0
50
100
150
200
250
300
350
400
450
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Time in seconds
Ang
ular
Pos
ition
- D
egre
es Fault adjacent to Bus 139 on oneof two parallel lines to Bus 140,Showing two coherent Groups
Successful Reclosure
Breakers Open
Fault
Gen 142, Hydro
Gen 138, Hydro
Gen 132, Steam Gen 101, Steam
Gen 124, Hydro
Gen 144, Hydro

67
5.3 Weak Link Identification of a Network Using a Clustering Method
Numerous simulations were performed on the 30-bus system to identify the clusters of its
network and thereby, to pinpoint the links connecting them, termed weak links. To this
end, a k-means clustering technique was applied to the Z-bus impedance matrix of this
system. This matrix is obtained by taking the inverse of the symmetric admittance Y-bus
matrix. This clustering method was executed by using the clustering toolbox of
MATLAB®.
Silhouette value was recorded for every simulation case to verify the
characteristic of the grouping that has been performed. A cluster having a silhouette value
closer to 1.0 unit is considered to enclose objects that exhibit a high degree of
similarities. After the clusters have been formed, the transmission lines connecting buses
that belong to two different clusters are the weak links of the network. When heavily
loaded, these weak links are anticipated to be the locations where out-of-step operation
may occur following a major disturbance on the system.
Figure 5.10 depicts the simulation results. We observe that eleven clusters are
formed. The mean silhouette value for the eleven clusters formed is 0.82, which is quite
high. Consequently, the weak links are the 11 branches connecting these clusters,
namely, Line 102-108, Line 108-112, Line 135 – 109, Line 136-135, Line 136-139, Line
120-123, Line 115-146, Transformer 144-145, Transformer 143-145, Transformer 148-
149 and Transformer 134-133.

68
s
H
H C S
S
H
H
HH
136M2
M1
M3
M4
101 102
136137
139 140
141142
135
133
134
127
129
128
120 118
123 124
115112
132
143
144145
146149148
109
108
Figure 5-10: Eleven clusters identified on the 30-bus system using k-means clustering
with mean silhouette value of 0.82.

69
Chapter 6
Conclusions
To decrease the risk of large-scale blackouts, appropriate control actions may be taken on
a power system when it undergoes a major disturbance. Few recognized control actions
are load shedding, generation curtailment, and controlled separation, to cite a few. In this
research work we have developed a new method aimed at performing controlled system
separation using current technologies. Here, a power system is split into islands having
minimal load-generation imbalance.
The proposed approach is based on three conjectures, which are stated and their
validity verified through extensive simulations performed on a 30-bus and a 517-bus
system. On these two test systems, it was verified the following two statements: (i) the
location of out-of-step operations is independent of the location and severity of the initial
fault; (ii) there is sufficient time gap between two out-of-step operations for initiating an
appropriate out-of-step blocking and tripping scheme.
The simulation results revealed that the location of out-of-step operation is highly
system specific and very much dependent on the prevailing system operating conditions.
Therefore, the determination of the out-of-step locations is a critical step to implement
the proposed method to any given power system. The study also revealed that it is
necessary that a power transmission network contains clusters of tightly connected buses
connected via few weak links. These weak interconnections can be identified by a
clustering method or past system experience. When these weak links are heavily loaded,
it is likely that they become the sites of out-of-step operation should the system
undergoes a major disturbance.
As a future work, more robust and effective methods for identifying the weak
links of a power transmission network should be developed. These methods may be
based on clustering techniques [23] applied to the Jacobian matrix of the dynamic model

70
of a power system. Here, both the synchronous machine model and the transmission
network model should be derived and linearized around an appropriate operating point.

71
References
[1] U.S.-Canada Power System Outage Task Force Interim Report. Causes of the
August 14th Blackout in the United States and Canada. November 2003.
Available at https://reports.energy.gov/.
[2] Prabha Kundur. Power System Stability and Control. McGraw-Hill Inc, 1994
[3] L. H. Fink and K. Carslen, “Operating Under Stress and Strain,” IEEE Spectrum, 1978.
[4] M. M. Adibi, R. J. Kafta, S. Maram and L. Mili, “On Power System Controlled
Separation,” IEEE Transactions on Power Systems, Vol. 21, No. 4, pp. 1894-
1902, Nov. 2006.
[5] U.S. Federal Power Commission. Prevention of Power Failures. Vol. I-III, U.S.
Printing Office, 1967.
[6] C. W. Taylor, “Improving Grid Behavior,” IEEE Spectrum, Vol. 36, pp. 40-44,
June 1999.
[7] M. Thaden, “Analysis of a Major Load Island Outage on the Potomac Electric
Power Company System,” IEEE Transactions on Power Systems, Vol. 14, No.1,
pp. 306-311, Feb.1999.
[8] C. Counan, E. Corradi and M. Stubbe, “Major Incidents on the French Electric
System: Potentiality and Curative Measures Studies,” IEEE Transactions on
Power Systems, Vol. 8, No. 3, pp. 879-886, Aug. 1993
[9] S. S. Ahmed, N. C. Sarker, A. B. Khairuddin, M. R. B. A. Ghani and H. Ahmad,
“A Scheme for Controlled Islanding to Prevent Subsequent Blackout,” IEEE
Transactions on Power Systems, Vol. 18, No. 1, pp. 136-143, February 2003.
[10] V. Vittal, W. kliemann, Y. X. Ni, D. G. Chapman, A. D. Silk and D. J. Sobajic,
“Determination of Generator Groupings for an Islanding Scheme in Manitoba
Hydro System Using the Method of Normal Form,” IEEE Transactions on.
Power Systems, Vol. 13, No. 4, pp. 1345-1351, Nov. 1998.

72
[11] M. S. Pasand and M. R. Dadashzadeh, “Iran National Grid Blackout, Power
System Protection Point of View,” Eighth IEE International Conference on
Developments in Power System Protection, Vol 1, pp. 20-23, April 2004.
[12] H. You, V. Vittal, and X. Wang, “Slow Coherency Based Islanding,” IEEE
Transactions on Power Systems, Vol. 19, No. 1, pp. 483-491, Feb. 2004.
[13] H. You, V. Vittal, and Z. Yang, “Self-healing in Power Systems: An Approach
Using Islanding and Rate of Frequency Decline-Based Load Shedding,” IEEE
Transactions on Power Systems, Vol. 18, No. 1, pp. 174-181, Feb. 2003.
[14] Q. Zhao, K. Sun, D. Z. Zheng, J.Ma and Q. Liu, “A Study of System Splitting
Strategies for Island Operation of Power System: A Two Phase Method Based on
OBDD,” IEEE Transactions on Power Systems, Vol. 18, No. 4, pp. 1556-1565,
Nov. 2003.
[15] K. Sun, D. Z. Zheng and Q. Liu, “Splitting Strategies for Islanding Operation of
Large-Scale Power System Using OBDD-Based Methods,” IEEE Transactions on
Power Systems, Vol. 18, No. 2, pp. 912-923, May 2003.
[16] Stanley H Horowitz and Arun G Phadke. Power System Relaying. 2nd Edition,
John Wiley & Sons, June 1996.
[17] M. M. Adibi. Controlled Islanding in Power Systems, IRD Corp., 2002.
[18] M. M. Adibi and D. P. Milanicz, “Protective System Issues During Restoration”,
IEEE Transactions on Power Systems, Vol. 10, No. 3, Aug. 1995.
[19] Arthur R. Bergen and Vijay Vittal. Power System Analysis. 2nd Edition, Prentice
Hall, 2000.
[20] Peter W. Sauer and M. A. Pai. Power System Dynamics and Stability. Prentice
Hall, 1998.
[21] Power Technologies International. PSS/E 30.1TM: Program Operation Manual.
Vol. 2, April 2005.
[22] Extended Transient-Midterm Stability Program (ETMSP). Users Manual. Version
3.1, Revision 1, Vol.2, May 1994.

73
[23] Leonard Kaufmann and Peter. J. Rousseeuw. Finding Groups in Data. John
Wiley & Sons, 1990.
[24] A tutorial on clustering algorithms. Available at
http://www.elet.polimi.it/upload/matteucc/Clustering/tutorial_html/hierarchical.ht
ml .
[25] Richard O Duda, Peter E Hart and David G Stork. Pattern Classification. 2nd
Edition, John Wiley & Sons, 2000.






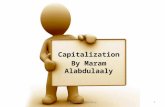





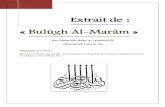



![Possessiv..maram 167[1]](https://static.fdocuments.net/doc/165x107/54be60164a79592b698b45e9/possessivmaram-1671.jpg)

