poukie8.free.frpoukie8.free.fr/.../Dossier%20de%20conception%20final.docx · Web viewLa commande...
42
Ecole Supérieure d’Ingénieurs de Luminy Département Informatique Université de la Méditerranée Luminy case 925 13 288 Marseille Cedex 09 Tél. 04 91 82 85 00 [email protected] Dossier de conception Date d’édition : 29 mai 2007 Client : M. LE VAN SUU Auguste M. TOUCHARD François Fournisseurs : Julie ANDRE Cécile BRUDER Charles-Basile ROUQUETTE Jérémy VIAL Date et signature : Date et signature : Date et signature
Transcript of poukie8.free.frpoukie8.free.fr/.../Dossier%20de%20conception%20final.docx · Web viewLa commande...

Ecole Supérieure d’Ingénieurs de Luminy Département InformatiqueUniversité de la MéditerranéeLuminy case 92513 288 Marseille Cedex 09Tél. 04 91 82 85 [email protected]
Dossier de conceptionDate d’édition : 29 mai 2007
Client : M. LE VAN SUU Auguste M. TOUCHARD François
Fournisseurs : Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL
Date et signature : Date et signature :
Date et signature
SommaireAvant propos
I – Introduction
Dossier de conception
II – Description matérielle
III – La télécommande1) Matériel utilisé 2) Câblage des composants
IV – Le mobile1) Matériel utilisé 2) Câblage des composants
V – Poste de commande informatique1) Principe de fonctionnement 2) Méthode d’envoi
VI – Protocoles de codage utilisés1) Codage du Voice Direct 2) Liaison Voice Direct / PIC 3) Codage du PIC et émission 4) Décodage du PIC et réception 5) Liaison PIC / Basic Stamp 6) Commande du mobile
VII – Algorithmes d’émission et de réception1) Algorithmes d’émission 2) Algorithmes de réception
VIII – Problèmes rencontrés
IX – Jeu de tests envisagés
X – Annexes
XI – Contact
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 2
Dossier de conception
Avant proposPour des raisons de manque de temps, le robot tel que décrit dans
le cahier des charges ne sera pas développé dans sa totalité. Le mobile sera commandé uniquement par la télécommande vocale. Les parties de commande par un logiciel et d’acquisition vidéo ne seront pas traitées.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 3

Dossier de conception
I – IntroductionCe document de conception vise à expliciter les différentes phases
de conception du robot télécommandé. Il donne de nombreux détails techniques. Il a été livré avec un cahier des charges et un manuel d’utilisation.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 4
Dossier de conception
II – Description matérielleLe système développé est un robot télécommandé. Il est composé
d'une télécommande vocale qui envoie les ordres jusqu'au mobile. Ce dernier reçoit les informations et exécute l'action correspondante (se déplacer...).
La télécommande est dotée : d'un dispositif de reconnaissance vocale (le « Voice Direct ») d'un microcontrôleur PIC16F84 d'un émetteur Haute Fréquence
Le « Voice Direct » permet d'enregistrer les mots de l'utilisateur qui commandera le robot. Lorsque l'utilisateur prononce un mot qu'il a au préalable enregistré, le « Voice Direct » donne en sortie le code correspondant sur 5 bits. Ces informations sont ensuite récupérées par le PIC16F84 qui est chargé de les transmettre à l'émetteur Haute Fréquence pour qu'elles atteignent le mobile.
Le mobile est composé : d'un récepteur Haute Fréquence d'un microcontrôleur PIC16F84 d'un microcontrôleur « Basic Stamp » de deux servomoteurs (d'un dispositif d'acquisition vidéo)
Lorsque les ordres ont été envoyés, le récepteur Haute Fréquence récupère et retransmet le signal jusqu'au PIC16F84. Ce dernier décode l'ordre reçu (algorithme de décodage détaillé dans la suite) et transmet l’information au « Basic Stamp » qui ordonne aux servomoteurs d'exécuter la commande correspondante.
La commande du robot devrait aussi pouvoir se faire à partir d'un poste informatique (PC), et ce dernier sera aussi capable de récupérer le flux vidéo renvoyé par la caméra posée sur le mobile.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 5

Dossier de conception
III – La télécommande
1) Matériel utilisé
Ce paragraphe décrit tous les composants utilisés pour réaliser la télécommande et la communication avec le mobile. Nous détaillons aussi leur fonctionnement.
Schéma global du système
La télécommande est dotée d’un dispositif de reconnaissance vocale Voice Direct. Elle communiquera avec le mobile par l’intermédiaire d’ondes radio à une fréquence de 433 MHz. Nous disposons en particulier d’un émetteur 433 MHz sur la télécommande, d’un récepteur 433 MHz sur le mobile, et d’un PIC 16F84 sur chaque module afin de traiter les signaux et d’engendrer les interruptions nécessaires.
Télécommande Mobile433 MHz
Voice Direct PIC 16F84 PIC 16F84 Basic Stamp
Émetteur Récepteur
Communication entre les différents éléments de la télécommande
Nous devons relier la sortie du dispositif Voice Direct à l’entrée d’un microcontrôleur PIC 16F84. Ce dernier traitera les bits reçus et renverra un signal à l’émetteur. Voici un schéma grossier du fonctionnement de la télécommande :
PIC 16F84Émetteur
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 6
Voice Direct

Dossier de conception
Dispositif de reconnaissance vocale Voice Direct :
Nous disposons d’une carte Voice Direct II ainsi que d’un module Voice Direct II nous permettant de réaliser l’apprentissage des mots et la reconnaissance vocale.
En particulier, cet ensemble est muni d’un récepteur (le microphone), d’un émetteur (le haut parleur), de cinq boutons poussoirs et de huit pins de sortie.
Le microphone nous permet d’effectuer l’apprentissage des mots. Le haut parleur nous permet de « communiquer » avec la carte. Cette
dernière nous donne les indications à faire. Les boutons poussoirs sont notés de S1 à S5.
S1 sert à apprendre un mot à la carte. S2 sert à reconnaitre un mot appris. S3 ne nous sert pas. S4 sert à remettre à zéro le système (effacer les mots appris). S5 ne nous sert pas non plus.
Nous nous serviront des huit pins de sorties notées de P0-0 à P0-7. Ces pins nous renvoient un code de sortie selon les mots reconnus.
Pour connaître le mode d’utilisation de la carte Voice Direct, se référer au manuel d’utilisation du robot.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 7
Dossier de conception
Microcontrôleur PIC16F84
Le PIC 16F84 comporte 18 pins dont la fonction est détaillée ci-dessous.
Patte Nom Fonction1 RA2 Port A, E/S2 RA3 Port A, E/S3 RA4/T0CKI Port A, E/S / Entrée timer4 MCLR Reset. L’entrée doit tout le temps être à 1 pour qu’il n’y
ait pas de reset.5 Vss Masse6 RB0/INT Port B, E/S / Entrée interruption7 RB1 Port B, E/S8 RB2 Port B, E/S9 RB3 Port B, E/S10 RB4 Port B, E/S11 RB5 Port B, E/S12 RB6 Port B, E/S, Programmation13 RB7 Port B, E/S, Programmation14 Vdd Alimentation entre 3 et 12V15 OSC2/
CLKOUTSortie du quartz pour l’horloge
16 OSC1/CLKIN Entrée du quartz pour l’horloge17 RA0 Port A, E/S18 RA1 Port A, E/S
Les pins RAx et RBx correspondent aux pins d’entrées/sorties à configurer (en entrée ou en sortie) par l'utilisateur par l'intermédiaire des registres TRISA et TRISB. La valeur qu'ont les pins en sortie est définie par les registres PORTA et PORTB. Attention : la pin RB0 peut servir pour signaler une interruption externe si le PIC est configuré pour les détecter (bit 7 et 5 du registre INTCON à 1 pour la configuration et détection sur le bit 1 du même registre) et la pin RA4 ne fonctionne pas en niveau TTL car elle peut servir pour le timer 0.
Nous avons développé les programmes pour le PIC sous la plateforme MPLAB.Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 8

Dossier de conception
Notre utilisation :
Nous avons choisi un quartz de 4 MHz. Attention : la fréquence est automatiquement divisée par 4, notre PIC tourne donc en réalité à 1 MHZ.
Nous avons aussi choisi d'utiliser le timer0. Celui ci fonctionne à l'aide d'un compteur sur 8 bits (comptant donc de 0 à 255). Lorsqu'il y a une erreur de retenue (overflow) si le PIC à été configuré pour les détecter (bits 7 et 5 du registre INTCON à 1 pour la configuration et détection sur le bit 2), il effectue le traitant d'interruption et la valeur du registre TMR0 repasse à 0. De plus nous avons choisi d'utiliser un pré scalaire de 256 pour le timer0 (bits 0, 1, 2 du registre OPTION_REG à 1 et le bit 3 à 0.) pour que le registre TMR0 soit incrémenté de 1 à chaque fois que 256 instructions sont effectuées. Cela nous permet de compter un temps plus important en faisant qu'une seule boucle.
Nous avons choisi que les pins RBX correspondront à des entrées (registre TRISB ayant pour valeur 255) et les pins RAX correspondront à des sorties (registre TRISA ayant pour valeur 0)
Nous avons choisi de détecter les interruptions dues à la pin RB0, pour recevoir les instructions du Voice Direct. Le code de l'ordre sera récupéré sur les pins RB1 à RB5 et sera renvoyé à l'émetteur haute fréquence via la pin RA0 sous la forme d'un nouveau codage (succession d'un certain nombre d'impulsion dépendant de l'ordre à transférer.).
Pour la réception les interruptions seront aussi détectées sur la pin RB0. A partir de la réception de la première impulsion un compte à rebours (simulé par le timer0) se met en marche. Nous récupérons le nombre d'impulsions pendant la durée de ce compte à rebours et renvoyons le code de l'ordre au Basic Stamp grâce aux pins RA0, RA1, RA2, RA3 et RB7.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 9

Dossier de conception
Module d’émission haute fréquence :
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 10

Dossier de conception
2) Câblage des composants
Dans cette partie, nous mettrons en évidence comment nous avons décidé de relier les éléments entre eux d’un point de vue composants.
Schémas de la télécommande :
Dans ce schéma, on montre le câblage de la télécommande sans représenter les alimentations. On met surtout en évidence les routes que prendront les données.
Parcours des données :
A la sortie du « Voice Direct », on a le codage de l'ordre sur 5 bits. On sait que chaque ordre comporte un bit à 1 dans son codage ce qui nous permet de déclencher une interruption sur la pin RB0 après le passage par la porte OU. Le PIC récupère donc l'information sur ses pins et les retransmet à l'émetteur. Cette retransmission sera faite en série.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 11
Dossier de conception
IV – Le mobile
1) Matériel utilisé
Le module de réception haute fréquence :
Microcontrôleur PIC 16F84 Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 12

Dossier de conception
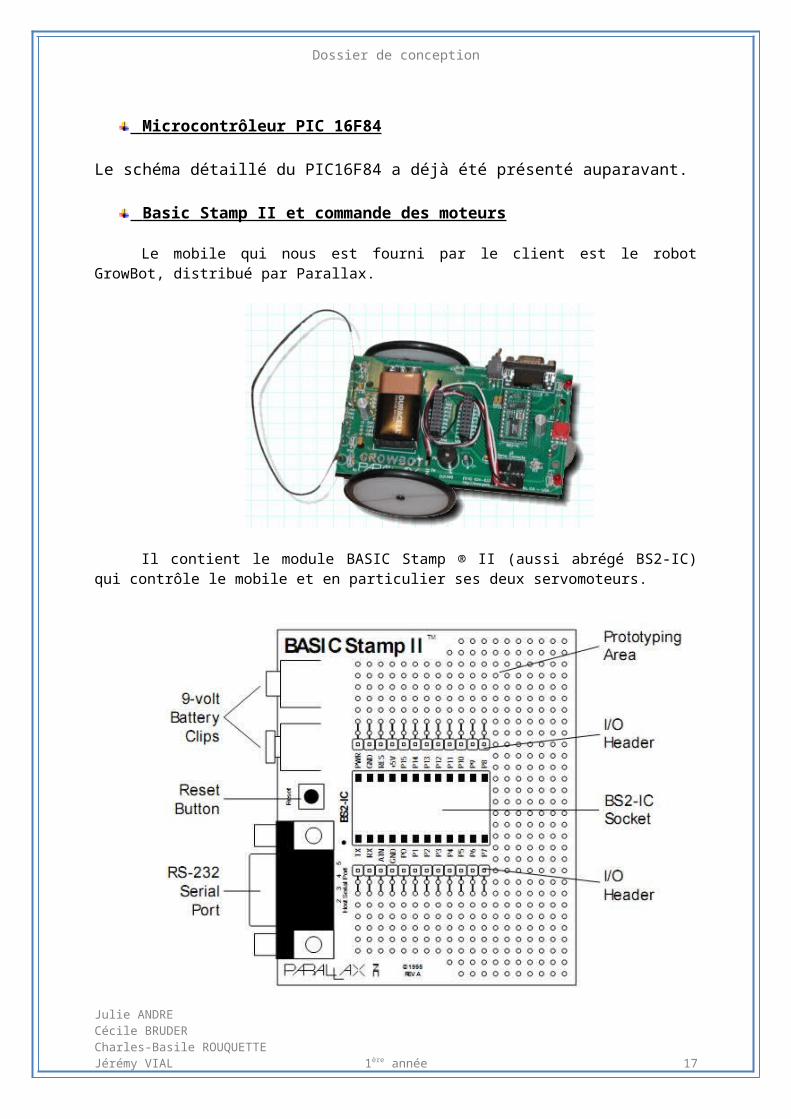
Le schéma détaillé du PIC16F84 a déjà été présenté auparavant.
Basic Stamp II et commande des moteurs
Le mobile qui nous est fourni par le client est le robot GrowBot, distribué par Parallax.
Il contient le module BASIC Stamp ® II (aussi abrégé BS2-IC) qui contrôle le mobile et en particulier ses deux servomoteurs.
Ce module BS2-IC contient un microcontrôleur PIC 16C57c. Le Basic Stamp possède seize pins d’entrées/sorties ainsi qu’une pin pour l’alimentation et une autre pin pour la masse.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 13

Dossier de conception
Sur le mobile, nous avons donc des sorties P0 à P15 du BS2, reliées au microcontrôleur.
Nous nous servons de cinq entrées/sorties : P1 à P5 pour recevoir les cinq ordres : Avancer, Tourner à gauche, Tourner à droite, S’arrêter et éventuellement Reculer. Ensuite c’est le microcontrôleur du Basic Stamp qui va interpréter ces informations et activer les servomoteurs.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 14

Dossier de conception
Nous pouvons le programmer en PBasic grâce au logiciel Stamp. Le mobile peut être relié à un PC par un câble série. Une fois le programme écrit, il est compilé sur le PC puis chargé dans le Basic Stamp et est prêt à être utilisé.
Le mobile a trois modes : Un lorsqu’il est hors tension, un autre pour charger le programme via le logiciel Stamp, et un dernier qui exécute le programme.
Le contrôle des servomoteurs se fait par une seule instruction : PULSOUT. On indique sur quelle pin (correspond à un des deux servomoteurs) on envoie l’information et la durée de l’impulsion envoyée. C’est cette durée qui va déterminer dans quel sens va tourner le servomoteur.
La pin 12 correspond à la roue gauche et la pin 13 à la roue droite.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 15

Dossier de conception
2) Câblage des composants
Schéma du mobile :
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 16
Dossier de conception
V – Poste de commande informatique
1) Principe de fonctionnement
Le PC offre une alternative de commande à la voix. Le logiciel permet en effet de transmettre les ordres au robot grâce au clavier de l'ordinateur. L'intermédiaire reste la télécommande comprenant l'émetteur haute fréquence. Donc le PC est relié à la télécommande. La sélection se fait grâce à une pression sur un interrupteur permettant de choisir le mode de contrôle : voix ou clavier de l'ordinateur.
2) Méthode d’envoi
Le PC sera en effet relié à la télécommande par l'intermédiaire d'un câble branché sur le port parallèle du PC. Le codage des informations est donc le même que celui du Voice Direct. La pression sur l'interrupteur permet de choisir de recevoir les informations venant du PC plutôt que du Voice Direct grâce à six multiplexeurs à 2 entrées. L'un d'eux permet de détecter d'où proviennent les ordres (ordinateur ou voix) et les 5 autres permettent d'envoyer le codage de l'ordre au PIC 16F84 chargé de l'émission des ordres.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 17

Dossier de conception
VI – Protocoles de codage utilisés
1) Codage du Voice Direct
Voici les codes correspondant aux mots appris sous la forme P0-7 P0-6 … P0-1 P0-0.
Word 1 Word 2 Word 3 Word 4 Word 5 Word 6 Word 7 Word 8Avance Gauche Droite Stop - - - -00000001
00000010
00000100
00001000
00010000
00100000
01000000
10000000
Cependant nous ne nous serviront que de quatre mots.
2) Liaison Voice Direct / PIC
Après avoir analysé le codage que nous proposait le « Voice Direct », nous avons choisi de récupérer les 5 bits directement (en parallèle) en reliant les pins du PIC à celles du « Voice Direct ». Lorsque l'utilisateur prononcera un mot, le PIC pourra récupérer cette information grâce à l'interruption déclenchée sur la pin RB0. Il reste à identifier de quel ordre il s'agit (avancer, tourner à gauche, ...) puis de le retransmettre à l'émetteur Haute Fréquence avec un codage cette fois-ci en série.
3) Codage du PIC et émission
Avant de proposer un codage pour l'émission des données, il faut d'abord s'intéresser à la méthode utilisée pour les recevoir.
On sait que le récepteur Haute Fréquence nous rendra le signal émis. On décide donc de détecter les fronts montants du signal pour décoder les informations reçues. Dans un premier temps, on choisit de coder les ordres en nombre d'impulsions (nombre de fronts montants).
Exemple : l'ordre « avancer » pourra être codé avec 2 fronts montants.
Ordres et codage :
Ordres Avancer Arrêter Reculer Gauche DroiteCodage (en nombre d'impulsions)
2 6 10 14 20
Il faut aussi préciser que l'envoi de chaque ordre sera effectué pendant une durée « d » bien déterminée. Ce qui permettra à la réception de compter le nombre d'impulsions reçues pendant la même durée.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 18

Dossier de conception
Afin de compter le plus précisément jusqu'à la valeur « d », nous utiliserons le timer0 du PIC.
Utilisation du timer0
On sait que le timer0 est capable de provoquer une interruption (interne) à chaque fois qu'il fait un overflow (débordement, passage de la valeur FFh à 00h). Nous choisissons donc d'envoyer une impulsion à chaque interruption du timer0 et comme il y a 20 impulsions au maximum, nous fixons la durée « d » à « 22 tours » du timer0 (22 overflow, donc 22 IT).
Fréquence d'émission
On sait que le timer0 est incrémenté à chaque exécution d'instruction. La fréquence d'exécution étant à 1 MHz, on devrait donc avoir une interruption à une fréquence de f = 1 MHz / 256. Cependant il faut aussi tenir compte du pré scalaire à configurer pour le timer0. Ce dernier peut prendre les valeurs : 2, 4, 8, 16, 32, 64,128, 256.
Après quelques tests sur le système d'émission/réception haute fréquence, nous avons remarqué que la transmission d'un signal à 500 Hz se faisait convenablement. On choisit donc de fixer le pré scalaire du timer0 à la valeur 8 car :
1 MHz / (256 * 8) = 488.28 Hz.
Signal d'émission
On sait maintenant que nous allons envoyer plusieurs impulsions pour transmettre l'ordre qui est donné par l'utilisateur. On en conclut donc que nous envoyons une sorte de signal carré.
On sait aussi que la réception se fait sur les fronts montants de ce signal ; il faut donc veiller à ce que les créneaux du signal carré soit assez « grands » afin que les fronts montants soient bien détectés.
Nous choisissons de laisser la pin RA0 (pin reliée à l'émetteur) à 1 pendant un certain temps « t » avant de la remettre à 0 pour le prochain créneau. Pour cela nous avons réalisé une boucle qui compte jusqu'à la valeur « x » avant de remettre la pin RA0 à 0. On obtient donc des créneaux d'une durée :
t = (1/fpic) * xIci « fpic » est la fréquence d'exécution du PIC.
À cette étape nous avons enfin notre signal d'émission pour coder les ordres à envoyer.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 19

Dossier de conception
4) Décodage du PIC et réception
On sait que les ordres sont codés en nombre d'impulsions. Le PIC est relié au récepteur Haute Fréquence sur la pin RB0. Le principe est de détecter chaque front montant des impulsions envoyées. Pour cela nous utiliserons les interruptions externes sur la pin RB0.
On a vu aussi que le timer 0 de l'émission envoyait les impulsions pendant une durée « d » précise. L'idée est donc de déclencher le timer 0 sur la même durée lorsqu'on reçoit la première impulsion et de compter toutes les impulsions reçues pendant la durée « d ». A la fin, il suffit de compter le nombre d'impulsions et de transmettre l'ordre correspondant au Basic Stamp.
5) Liaison PIC / Basic Stamp
La transmission vers le Basic Stamp se fera en parallèle sur 5 pins (de RB1 à RB5 du PIC16F84).
Le Basic Stamp reçoit les informations envoyées par le PIC sur ses pins P1 à P5. Il va ensuite analyser ces informations et commander les servomoteurs en conséquence par l’intermédiaire des pins 12 et 13 qui correspondent respectivement aux roues gauche et droite.
6) Commande du mobile
Les servomoteurs sont actionnés à l’aide d’impulsions. La durée d’une impulsion définit le sens de rotation du servomoteur, voire son immobilité. En combinant ces données, nous arrivons à commander le mouvement du robot.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 20

Dossier de conception
VII – Algorithmes d’émission et de réception
1) Algorithmes d’émission
Nous allons détailler ici les algorithmes du programme d'émission.
Programme principal :
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 21

Dossier de conception
Sous-programme d'initialisation :
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 22

Dossier de conception
Traitant d'interruption :
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 23

Dossier de conception
Sous-programme de traitant d'interruption :
Interruption pin RB0
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 24

Dossier de conception
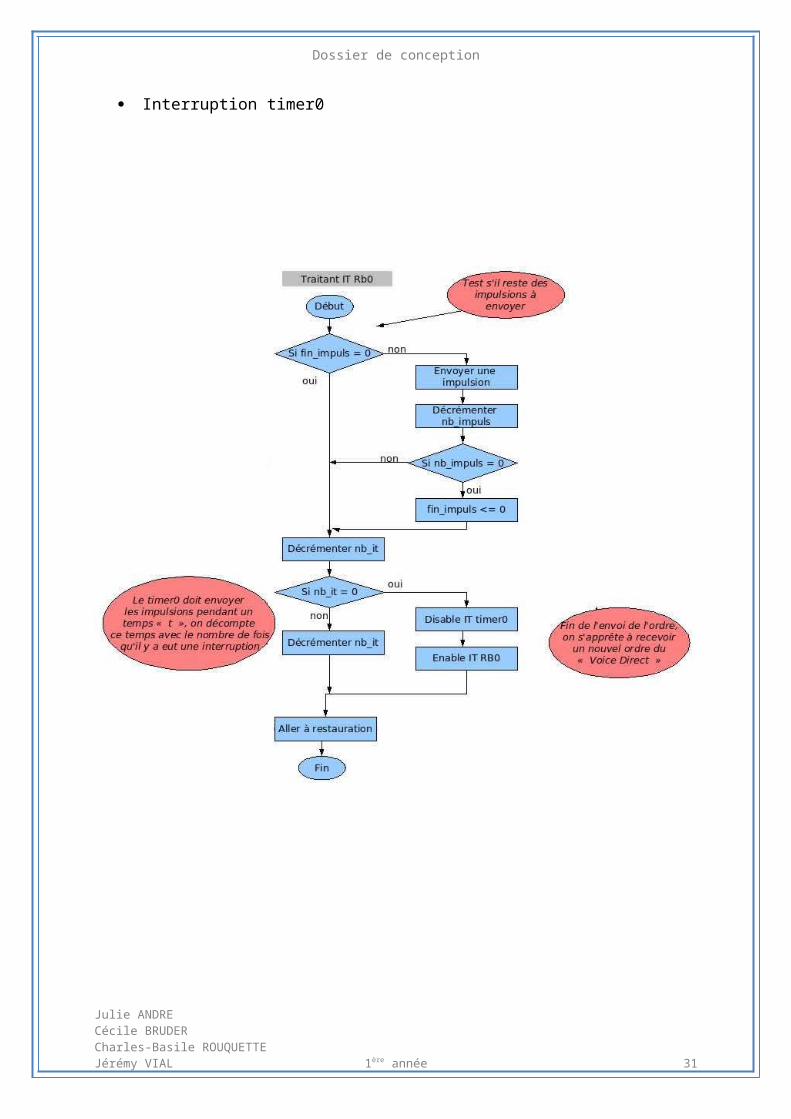
Interruption timer0
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 25

Dossier de conception
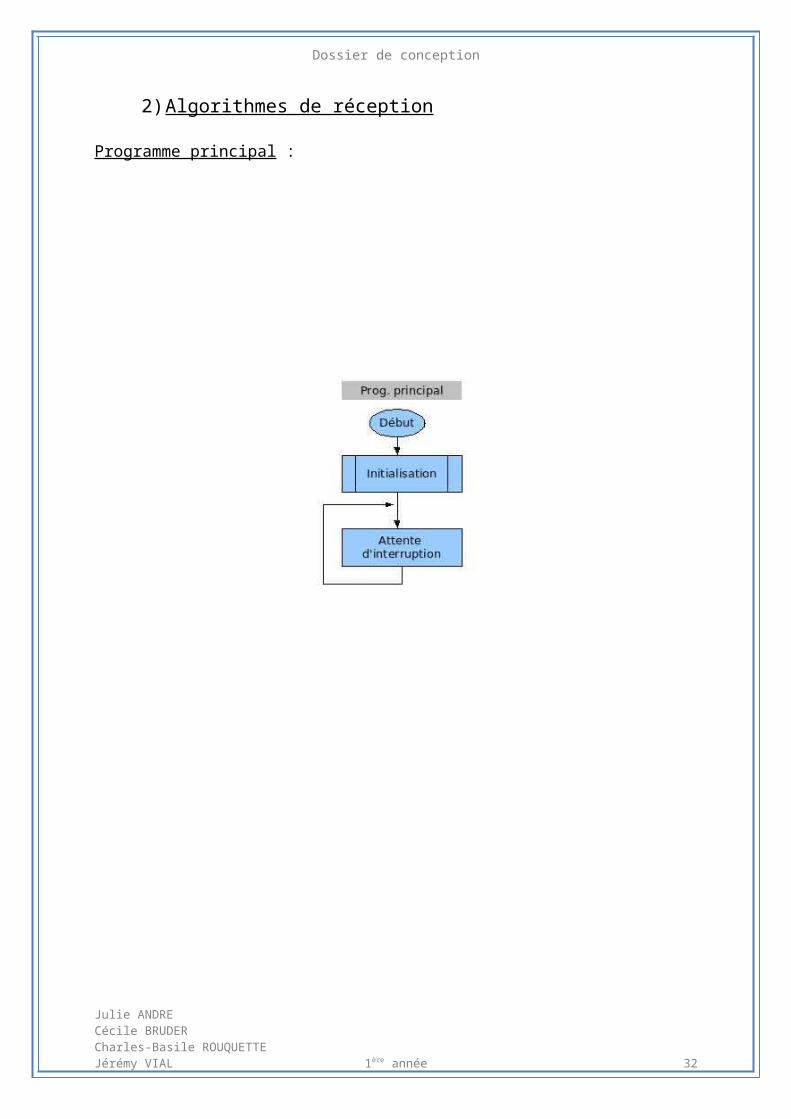
2) Algorithmes de réception
Programme principal :
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 26

Dossier de conception
Sous-programme d'initialisation :
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 27

Dossier de conception
Traitant d'interruption :
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 28

Dossier de conception
Sous-programme de traitant d'interruption :
Interruption RB0
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 29

Dossier de conception
Interruption timer0
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 30
Dossier de conception
VIII – Problèmes rencontrésAvec le Voice Direct : - La carte fournie étant mal soudée, certaines sorties étaient toujours
à 0. Faisant confiance à la carte (à tort !), nous pensions avoir mal compris le fonctionnement de celle-ci. Nous avons donc perdu un peu de temps à nous rendre compte qu’il fallait ressouder certaines pistes.
Avec le PIC 16F84 : - Il a fallu apprendre le langage d’assemblage lié à ce dernier, peu
fonctionnel- Nous avons rencontrés des problèmes de synchronisation : Les
deux PIC utilisés devaient suivre la même base de temps. Nous avons donc pensé à utiliser le timer 0
Avec l’émission réception : - Il a fallu réfléchir à un algorithme pouvant envoyer des données
logiques en les transformant en signaux- Une fois les programmes réalisés, nous avons fait des tests sans
aucun résultat. Nous avons perdu beaucoup de temps à essayer de « faire marcher » l’émetteur et le récepteur. Pour des raisons matérielles, ces derniers ne fonctionnaient pas.
- Une fois ce problème réglé, nous nous sommes rendu compte que le signal transmis était trop bruité. Il en a résulté que le récepteur ne recevait rien que nous pouvions interpréter. Nous avons donc dû recommencer cette longue phase et trouver un nouvel algorithme et une autre méthode d’envoi.
Avec le Basic Stamp : - De même, il a fallu apprendre un autre langage de programmation.
Même si le langage en lui-même n’est pas extrêmement compliqué, il y avait quelques subtilités à remarquer.
- Un fois le programme conçu, nous avons eu du mal à le charger dans le Basic Stamp. Il existe diverses raisons à ce problème : les piles n’étaient pas chargées totalement, le câble fourni étant un câble série/série et n’ayant pas cette prise série sur nos ordinateurs portables, nous avons dû utiliser un adaptateur.
Nous ne disposions que d’un matériel limité. Nous avons dû nous adapter à ce matériel et aux salles de travail mises à notre disposition.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 31
Dossier de conception
Lorsque nous avions fini les tests unitaires, nous avons voulu relier certains modules ensemble. Cette phase nous a fait connaître quelques surprises :
Nous avons d’abord essayé de relier directement les pins de sorties du Voice direct aux pins d’entrées du Basic Stamp. Mais nous n’avons obtenu aucun résultat. Ceci dû à plusieurs raisons. - Tout d’abord la tension en sortie du Voice Direct était trop faible
pour correspondre à un 1 logique en entrée du Basic Stamp. - Ensuite, les autres pins du Basic Stamp censées être à 0 devaient
être reliées à la masse du Basic Stamp. Les pins de sortie du Voice Direct censées être à 0 ne correspondaient pas à la masse du Basic Stamp.
Nous avons ensuite essayé de relier les pins de sortie du Voice Direct aux pins d’entrées du PIC 16F84. Les pins de sorties du PIC 16F84 étaient reliées à l’émetteur. Mais l’émission réception ne marchait pas donc nous n’avons pas pu tester si le programme du PIC fonctionnait.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 32

Dossier de conception
IX – Jeux de tests envisagésNous allons faire deux types de tests :
Des tests de fonctionnalités Des tests techniques
Les tests de fonctionnalités serviront à vérifier que le robot remplit bien les fonctions définies dans le cahier des charges.
Plus précisément : La télécommande doit pouvoir apprendre les ordres prononcés par
l’utilisateur La télécommande doit comprendre les ordres de l’utilisateur La télécommande doit pouvoir envoyer les ordres au mobile Le mobile doit pouvoir recevoir les ordres envoyés Le mobile doit finalement pouvoir exécuter les ordres de
l’utilisateur
Les tests techniques serviront à vérifier les valeurs logiques des pins des différents composants du système.
Plus précisément : La télécommande doit comprendre les ordres de l’utilisateur La télécommande doit pouvoir interpréter les ordres de l’utilisateur La télécommande doit pouvoir envoyer les ordres au mobile Le mobile doit pouvoir recevoir les ordres envoyés Le mobile doit pouvoir interpréter les ordres reçus Le mobile doit finalement pouvoir exécuter les ordres de
l’utilisateur
D’autres caractéristiques techniques doivent être respectées, telles que : Le temps entre l’envoi d’un ordre et l’exécution de l’ordre par le
mobile inférieur à 1s La distance maximale entre la télécommande et le mobile doit être de
50m Taille et poids du robot
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 33

Dossier de conception
X – Annexes
Le présent document est livré avec : - un cahier des charges- le planning prévisionnel- un compte rendu des réunions avec le client- le code des programmes d’émission, de réception- le code du programme de commande des servomoteurs- un cahier de tests- un manuel d’utilisation.
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 34

Dossier de conception
XI – Contact
Julie ANDRE [email protected] 06.72.39.41.96
Cécile BRUDER [email protected] 06.73.59.64.01
Charles-Basile ROUQUETTE
06.77.09.57.20
Jérémy VIAL [email protected] 06.28.65.18.45
Julie ANDRECécile BRUDERCharles-Basile ROUQUETTEJérémy VIAL 1ère année 35






![Estrategias%20de%20enseñanza%20para%20la%20promoción%20de%20aprendizajes[1] [autoguardado]](https://static.fdocuments.net/doc/165x107/5587d994d8b42a14408b4699/estrategias20de20ensenanza20para20la20promocion20de20aprendizajes1-autoguardado.jpg)