2006 Int Ansys Conf 134

of 15
Transcript of 2006 Int Ansys Conf 134
-
8/7/2019 2006 Int Ansys Conf 134
1/15
Some Aspects for the Simulation of a Non-LinearProblem with Plasticity and Contact
Eduardo Lus Gaertner
Marcos Giovani Dropa de BortoliEMBRACO S.A.
Abstract
A linear elastic model is often not appropriate for numerical simulations of conformed mechanicalcomponents. Such processes have large permanent deformations, and require material models that account
for the relationship between stress and strain, along with the influence of temperature and strain rate..Important parameters are mesh quality, solver type, contact behavior, boundary conditions and the material
model. Also, when the properties are unknown and the data available in the literature is inadequate, lab
tests are indispensable. The easiest and most common test is the tension test. It provides information, such
as stress-strain curve, Young modulus, yield and ultimate stress. This work proposes to analyze numerical
results using MISO and BISO models, with experimental data from a tension test. This problem involves
compressing a cylinder against two flat surfaces. It is validated with actual tests, where the load versusaxial and radial displacement are measured during load application and elastic return. The importance of
the contact method, element type and size are evaluated with respect to final deformation and CPU time.
Introduction
One of the principal difficulties with finite element modeling is using the correct properties for the
materials involved. Frequently, the analyses are performed with material data obtained from the literature.
This fact raises the risk of results that do not represent the actual material. Of course that there are otherfactors, like geometry, mesh, boundary conditions, loads, and contact parameters, that are very important to
successful Finite Element Method (FEM) application.
Looking back to the material case, the problem becomes more pronounced when the analysis moves from
linear (elastic behavior) to non-linear (elasto-plastic behavior). In this situation, the correct characterizationof the mechanical behavior of the material is fundamental.
Consider a typical stress-strain curve for steel, one of the most common curves in engineering. This curve
is obtained from a tension test performed on standard specimens, where the deformation is measured as a
function of the applied axial load. Up to a certain magnitude, the deformation in the specimen is elastic and
proportional to the load. This point (Sy) is called yield strength or yield point. Beyond it the material entersin the plastic region, and starts to undergo permanent deformation, i.e., the specimen will not return to its
initial length. In the literature there are various mathematical models to describe the elasto-plastic behavior
of the materials. The used most often are: elastic-perfectly plastic, elasto-plastic with linear or nonlinearhardening, isotropic or kinematic hardening and elasto-viscoplastic,
It is becoming more common to apply FEM to simulate the conformation process, such as stamping,
extrusion and forging. In those cases, the correctly setting up the contact parameters is essential to theproblem solution. It will also aid CPU processing time (convergence) and result accuracy. These two
factors, (non-linear material properties and contact), lead to highly complex problems in the numerical
point view, demanding considerable theoretical and computational effort to reach the solution.
The objective of this work is to present the main steps that should be followed in the numerical simulation
of a specimen under compression. In this simulation, besides the geometric simplicity of the model, it
involves so complex stages, since the characterization of the stress-strain curve of the material, contact
parameters evaluation, including a experimental test to determine the friction coefficient, study of elasto-plastic models, influence of the elements and mesh, and at the end a comparison with experimental results.
-
8/7/2019 2006 Int Ansys Conf 134
2/15
Material properties
An initial step for simulations is to know the material properties for the problem. One can not simulate a
steel gear using aluminum properties. There are a lot of models to describe the elasto-plastic behavior of
the materials. Each model has its characteristic and is appropriate to a certain type of problem. Because of
this, it is very important to know the theory before using it.
Examples of models are: linear elastic,
elastic-perfectly plastic,
elasto-plastic with linear or nonlinear hardening,
isotropic or kinematic hardening.
Several options and models are available for describing plasticity behavior in ANSYS. This work will dealwith only the BISO and MISO models.
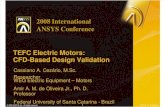
The Bilinear Isotropic Hardening (BISO) option uses the von Mises yield criteria coupled with an isotropic
work hardening assumption. It is called bilinear because just two lines define the stress-strain curve: one to
describe the linear elastic region and another to the plastic, see Figure 1a. The Multilinear Isotropic
Hardening (MISO) is like the previous model, except that a couple of curves are used instead of a bilinearcurve, Figure 1b.
Figure 1. Uniaxial behavior for a) MISO and b) BISO model.
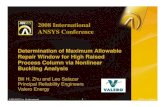
To enter the information in ANSYS, it is necessary to define the materials behavior in both the elastic and
plastic region. To accomplish this, standard strength specimens were produced and submitted to a tension
test. The experiment uses a grip-gage to collect the axial strain and a load cell measuring the traction force,
all connected to a computer. Data used in ANSYS for MISO model are shown in Figure 2, but not
adimmensionally as here. The material of the tension test specimens is the same as that for the nextexperiment.
-
8/7/2019 2006 Int Ansys Conf 134
3/15
Figure 2. True stress-strain curve.
FEM model
The objective of the tension test is to collect the material properties and supply the material properties for
the simulation of a compression test, the purpose of this paper. The specimen for compression is
cylindrical, with 9.0 mm diameter and 18.0 mm height.
Figure 3. FEM model with refinement factor of a) 1.0 and b) 3.0.
To simplify the analysis, some assumptions are considered:
The elements have axisymmetry, so it is a 2D simulation;
-
8/7/2019 2006 Int Ansys Conf 134
4/15
Poisson coefficient of 0.3;
The surfaces that compress the specimen are flat and rigid;
Constant friction coefficient among specimen and flat surfaces;
The material behavior for compression is the same as for tension.
The model is composed by a section of the cylinder and two rigid lines in contact with the body: one is
fixed (bottom) and another receives the load (upper), see Figure 3a. The load is applied in steps up to the
maximum compression load. Then, a second time step gradually removes it. The specimen has elasto-
plastic behavior. This whole model allows the simulation of permanent deformations of the body.
The complete model is made with ANSYS Parametric Design Language (APDL). This scripting languageallows the model to be built in parametric terms. Besides the simple geometry of the model, the language
allows that factors like element type, mesh refinement, contact parameters and material behavior be able to
be easily changed and analyzed.
To make the analysis easier in terms of degrees of freedom (DOF), a parameter called refinement factor is
defined, indicating how the mesh is refined with regard to a standard one. In this case, the reference mesh ispresented in Figure 3a, and consists of 3 elements in the radius and 12 elements in the height. The sizes are
divided to have each element with quadrate shape. Thus, for a refinement factor of 3.0, there are 3*3elements in the radius and 3*12 elements in the height, Figure 3b.
Contact parameters
The iterative analysis of two non-adjacent elements is performed with contact elements. Contact elements
prevent contacting surfaces from passing through each other and transfer forces between contactingsurfaces. Problems involving contact are highly nonlinear and require significant resources to solve. There
are methods for contact and also parameters to set up. Pure Penalty, Pure Lagrange and Augmented
Lagrange are used the most. Each method has its characteristics, with advantages and disadvantages.
In pure penalty, the iteration among the contact surfaces is achieved using a kind of spring. When contact
is detected, the spring deflects, creating a contact force that satisfies the equilibrium. This method requiresspring stiffness, (also called the normal penalty stiffness factor FKN). This method will converge more
readily, but shows small penetration between the contact surfaces and is sensitive to FKN value.
Artificially high FKN values can lead to convergence difficulties, while low values yield exaggerated
penetration.
The Augmented Lagrange method uses a series of penalty functions to guarantee contact compatibility. The
contact forces are raised up during the solution. This approach minimizes penetration, is better
conditioned than Pure Penalty and is less sensitive to contact stiffness, but might require more iterations.
The Pure Lagrange method does not use those virtual springs, but adds an extra DOF (contact pressure) to
reach the contact compatibility in order to guarantee the zero penetration. However, it requires direct
solves, which means extra computational effort. Moreover, convergence problems can occur due the overconstraining phenomenon.
The friction between two bodies is set up as a parameter of the contact method. When friction is included,
shear forces are added between the bodies. In ANSYS, friction is implemented using a Coulomb model.
Contact problems involving friction produce an unsymmetrical stiffness matrix, and using anunsymmetrical equation solver is more computationally expensive than a symmetric solver. For this reason
ANSYS uses a symmetrization algorithm by which most contact problems involving friction can be solved.
The contact methods used in the simulations are Pure Lagrange, Augmented Lagrange or Pure Penalty. In
the last two, the values for FKN are 1.0 and 100.0.
-
8/7/2019 2006 Int Ansys Conf 134
5/15
Friction coefficient
One important parameter in analysis involving contact is the friction coefficient among the bodies faces.
For the case in question, the friction coefficient is measured, using a simple inclined plan. At first, a
specimen is placed on the plan surface, and slowly it is inclined, see Figure 4. The tangent of the inclination
angle, which provides the initial slid of the body, is the static friction coefficient. Equation bellow is the
force sum on the inclined direction. No lubricant is applied among the body and flat surfaces during
experimental tests. For this case, the friction coefficient obtained is 0.2.
tcoefficienFrictiontansencos
*Weight*cos*NormalF
0Weight*sinF
friction
friction
===
==
=
Figure 4. Friction test.
Numerical resultsFigure 5 represents the permanent deformation for the body after applying a compressive force and
removing it, in axial and radial directions. The parameters for this analysis are: refinement factor of 3.0,
element type PLANE183 (higher order 2-D, 8-node element). The Pure Lagrange method is used to reducethe errors from the contact elements. The friction coefficient is 0.2, the same as obtained at the
experimental test. The material model is MISO, with data from the tension test, Figure 2.
-
8/7/2019 2006 Int Ansys Conf 134
6/15
Figure 5. Axial and radial permanent deformation.
Material model:
So important as the boundary conditions, the correct set up of the material properties can be deceiving inthe accuracy of an analysis. In this chapter it shall be discussed the numerical results obtained for the
compressive test simulation, when using MISO and BISO model to characterize the material. The
difference between them is that in the former the stress-strain curve is discretized by several line segments.
The latter consists of just two lines: one for elastic and another for plastic behavior.
In ANSYS, the BISO model can be easy used: it is just necessary to choose the model and inform the
Young modulus, the yield stress and the line tangent that defines the plastic field. The BISO model is
evaluated, for the problem in question, using two different curves to characterize the material, withdifferent yield stress and line tangent, as shown in Figure 6.
-
8/7/2019 2006 Int Ansys Conf 134
7/15
-
8/7/2019 2006 Int Ansys Conf 134
8/15
Figure 7. Von Mises stress distribution for maximum load, using BISO curve a and b.
With model BISO based on curve a, where the yield stress was increased to better fit the experimental
stress-strain curve, there is just plasticity in the corners. In the Figure 7 it is possible to see the stress
distribution in the body, using curves a and b. For curve b, the differences in the results are smaller,because it has been approximated a line for the plastic field just for small deformation, which occurs in this
problem. For this reason, the use of BISO model requests a lot of care, and the incorrect set up of its
parameters can lead to very large differences in the permanent deformations.
Contact parameters influence:
In models involving contact, the correct set up of the various contact parameters are important for the
analysis results, and some times can lead to the non-convergence of the problem. Among the parameters,the principals are the contact method, the contact stiffness, when it is necessary, and for the case in
question, the friction coefficient. The influence of this last one can be shown in Figure 8.
-
8/7/2019 2006 Int Ansys Conf 134
9/15
Figure 8. Influence of the friction coefficient on axial and radial permanent deformation.
The friction among the flat surfaces (in axisymmetric represented by two lines) and the specimen is
responsible for the reduction of the body material flow in those regions. As consequence, the increase of
the friction coefficient provides higher radial permanent deformation in the half height of the body. On the
other hand, if there is no friction, the deformed body has a cylinder shape, not a barrel.
According to Figure 8, the increase of friction coefficient after 0.3 brings no relevant difference for the
radial and axial permanent deformation, less than 4 %, but the opposite occurs for friction coefficient lessthan 0.3. So, if a lubricant is placed in the experiment or if the friction coefficient were not very well
measured before, the deformation shall have a huge change.
An attempt was done to simplify the problem, eliminating the contact elements. In the upper body surface a
force is distributed and in the bottom face a non-displacement condition. The time necessary to solve the
problem is reduced between 30 and 60 %, depending the contact method. The result for this simplification
is an axial permanent deformation of 62.2 m, similar as that on obtained for a friction coefficient of 0.1.
The radial permanent deformation is 9.4 m, a little higher than any other result with contact.
High variation in the results is observed due to the contact method. It can be explained by the mathematicalpenetration between two bodies under contact when using stiffness factor. For example, the penetration
reaches 2.2 m for a friction coefficient 0.2 and FKN equals to 1. Remember that for Pure Lagrange
method the penetration is zero.
The influence of the mesh quality in the permanent deformation is noted in Figure 9. One can see that for
FKN equals to 100 and for Pure Lagrange contact method, the element refinement does not bringsignificant influence. However, considerable variation is found for FKN value of 1.0. It is important to
mention that the results for Figures 8, 9 and 10 are performed using element type PLANE183, and
simulations for another element type shall produce different graphs.
-
8/7/2019 2006 Int Ansys Conf 134
10/15
Figure 9. Influence of the element size on axial and radial permanent deformation.
An important thing that needs to take in consideration is the number of iterations to converge the problem.For the simulations with MISO model and element type PLANE183, the number of iterations does not vary
so much, from 47 to 66, for FKN values of 1.0 and 100.0. The change of contact method to Pure Lagrange
brings an increase in the iteration number, reaching 108, which is expected. This corresponds toapproximately the double of iterations to converge the problem, the same relation found in the CPU time
increase, see Figure 10. According to it, the simulation-processing time is a potential function of the
number of degrees of freedom (DOF), for MISO model and element type PLANE183. In fact, the potential
coefficient is 0.97, and the relation between CPU time and DOF can be assumed linear, which corresponds
to a coefficient of 1.0.
Figure 10. Influence of the degrees of freedom and contact method on CPU timeprocessing.
So, for the same number of DOF, Pure Lagrange contact method takes the double time to converge,
compared to Augmented Lagrange or Pure Penalty. Besides time processing is an important factor to take
-
8/7/2019 2006 Int Ansys Conf 134
11/15
into consideration, results quality should the studied, because it will serve for nothing a coarse mesh that
converges relatively fast, but for the wrong place.
Element and mesh influence:
As mentioned before, element type choice can be determinant for results and time processing. This sectionanalyses the influence of the element type and the mesh quality for the permanent deformations of the body
under compression. The element used in the previous simulations is PLANE183, which is bi-dimensional,
with two degrees of freedom in each node (translation in x and y axes), and axisymmetric simplification. Tocompare results with different element types, now it is used quadrilateral elements: PLANE 42, 182, 82 and
183, and the triangular PLANE2. Except to the first two, the other elements are higher order, i.e., have
quadratic displacement behavior.
In Figure 11, one can see that CPU time for higher order elements (PLANE 2, 82 and 183) is lower than for
the others elements. The convergence criteria and value is the same in all simulations. But this can lead to a
wrong conclusion if no care is taken. If you use the same element size, the analysis with the first group
needs approximately 50 percent more time for convergence. It because those elements have 6 or 8 nodes
per element. Consequently, a graph of CPU time versus refinement factor will point to PLANE 42 and 182as a better element, when looking for time processing.
Figure 11. Influence of the degrees of freedom and element type on CPU time processing.
On the other hand, PLANE 42 and 182 elements show the worst results for coarse meshes. Figures 12 and
13 present, respectively, the axial and radial permanent deformation after load removal with the refinementfactor variation. For very refined meshes, results for all element types converge to the same point. It is also
possible to see that elements PLANE 82 and 183 have the smaller variation in the results when changing
the element size. It means that even with a coarse mesh the results are not so different to another with veryrefined mesh. This verification makes possible a gain in time processing, because for refinement factor
greater than 3.0 no expressive differences are found for deformations.
-
8/7/2019 2006 Int Ansys Conf 134
12/15
Figure 12. Variation of axial permanent deformation by the refinement factor.
Figure 13. Variation of radial permanent deformation by the refinement factor.
Experimental results
To validate the numerical model, five cylindrical specimens were submitted to a compression test. In a
machine test, a load cell measure the actual load applied, and a sensor gives the relative displacement of the
nippers that tighten the device (a punch and a die). The punch and a die are hardened to guaranty plastic
deformation just in the specimen. In addition, a linear sensor has been installed to collect diametral
displacement, during load appliance and elastic return. See the whole apparatus in Figure 14.
-
8/7/2019 2006 Int Ansys Conf 134
13/15
Figure 14. Device to compression test.
Figure 15. Diametral increase measurement on half height body by compression force.
Good concordance between numerical and experimental results are achieved, according to Figure 15 thatshows a graph of diametral displacement at the half height versus applied force. Similar results are found in
Figure 16, which plots the axial displacement along load appliance. In the first case, the numerical modelhas a significant distance to the experimental in the region after yield point, which does not occur in the
axial direction.
-
8/7/2019 2006 Int Ansys Conf 134
14/15
Figure 16. Axial displacement by compression force.
A more accurate measurement of radial and diametral plastic deformation is made using a micrometer,
taking the dimensions before and after test, see table 2. It indicates that a mean experimental diametral
permanent deformation of 16 m, against 18 m from numerical results. This corresponds to a
difference of 12 %, passing to 16 % when analyzed the axial deformation.
Table 2: Specimens dimension before and after experiment
Specimen SP1 SP2 SP3 SP4 SP5 Mean
Initial length [mm] 17.995 17.995 17.994 18.007 18.002
Initial diameter [mm] 9.003 9.001 9.001 9.004 8.999
Axial permanent deformation [mm] 0.053 0.043 0.053 0.045 0.050 0.049
Diametral permanent deformation [mm] 0.016 0.014 0.021 0.017 0.013 0.016
One can note that the diametral and axial deformations measured with a micrometer, Table 2, are a little
different to those collected by the test machine, in Figures 15 and 16, after removal the load. This can bedue to small gaps in the test machine, in the axial direction. Another factor that can influence the
experimental results is that the edges of the sensors in contact to the specimen, that collect diametraldisplacements, are rounded. A flat face would be better.
Conclusion
-
8/7/2019 2006 Int Ansys Conf 134
15/15
The problem used to analyze the influence some parameters for a simulation of plasticity and contact
consists in a compression of a cylinder against two flat surfaces, involving plasticity and contact. Some
simplifications are made to reduce the time necessary to process the simulation.
Between all parameters analyzed on this work, the most influence for the results is the material model and
its properties. Some care should be taken when using BISO model instead MISO. Depending the aspect ofthe stress-strain curve and the range of use, the condition of plasticity can vary, i.e., for the same load, a
simulation with MISO model can pass the elastic region, and with BISO model not.
It is very important to choose a proper contact method, and also set up the parameters. According to the
results, the choice of the contact method is more determinant for the results than the element type and size,
for the problem in question.
The friction coefficient has a very influence on the results in a range of 0 to 0.3. After it, the change in theaxial and radial permanent deformation is not significant.
The simplification of the contact elements by non-displacement conditions is not suitable for the problem in
question, because there are a huge variation on the results.
As expected, elements of higher order (PLANE 82 and 183) showed better results compared to those of
with linear interpolation (PLANE 42 and 182). For the second group, there is a great variation in the resultswhen elements have big sizes. For very refined meshes, results for all element types converge to the same
point. The choice of the PLANEXXX elements and the mesh quality has more influence in the CPU timeprocessing than in the results.
Good correlation between numerical and experimental is found, with differences from 12 to 16 %, talking
about the radial and axial deformations. The factors that can influence in the experimental results are:
The edge of the diametral displacement sensors are rounded, but should be flat;
The diametral displacement sensors can be not very well aligned;
There are deviations in the tension test results, which have big influence to the numerical materialmodel;
The experimental determination of friction coefficient can show small variations, that represents alarge difference in the permanent deformation values, because it is lower than 0.3.
Reference
1) ZAHAVI, Eliahu, & BARLAM, David. Nonlinear Problems in Machine Design. CRC Press, NewYork, 2000.
2) BOSCO Jr., Raul. Structural Analysis of a Sandwich Valve System for Hermetic Compressors. 2005ANSYS Latin American Users Conference (Presentation): So Paulo, 2005.
3) ANSYS User Guide Manual.