13 ControlofSecond-OrderSystemmurray/courses/cds101/fa02/caltech/pph02-c… · Normalized Time...
22
13 Control of Second-Order System In this section, we analyze PD and PID control of a plant typical in mechanical positioning systems. We also propose a possible design method. The nominal model for the plant is P (s)= A s(s + p) where A and p are fixed parameters. 13.1 PD control First, consider PD control, specifically proportional control, with inner loop rate- feedback. This is shown below (its just the PID diagram, with the integral action removed) K P K D A 1 s+p 1 s ✲ ✐ ✲ ✲ ✐ ✲ ✲ ✲ ✐ ❄ ✲ ✲ ✲ ❄ ✛ ✻ ❄ ✛ ✛ ✻ - - u r y d Inner-loop Rate-Feedback × In terms of plant and controller parameters, the loop gain (at breaking point marked by ×) is L(s)= A(K D s + K P ) s(s + p) In other words, from a stability point of view, the system is just unity-gain, negative feedback around L. K P K D A 1 s+p 1 s ✲ ✲ ✐ ✲ ✲ ✲ ✐ ❄ ✲ ✲ ✲ ❄ ✛ ✻ ❄ ✛ ✛ ✻ y 126
Transcript of 13 ControlofSecond-OrderSystemmurray/courses/cds101/fa02/caltech/pph02-c… · Normalized Time...

13 Control of Second-Order System
In this section, we analyze PD and PID control of a plant typical in mechanicalpositioning systems. We also propose a possible design method. The nominalmodel for the plant is
P (s) =A
s(s+ p)
where A and p are fixed parameters.
13.1 PD control
First, consider PD control, specifically proportional control, with inner loop rate-feedback. This is shown below (its just the PID diagram, with the integral actionremoved)
KP
KD
A1
s+p1s
- i - - i - - - i?- - -
?
¾
6?
¾¾
6− −ur y
d
Inner-loop Rate-Feedback
×
In terms of plant and controller parameters, the loop gain (at breaking pointmarked by ×) is
L(s) =A(KDs+KP )
s(s+ p)
In other words, from a stability point of view, the system is just unity-gain, negativefeedback around L.
KP
KD
A1
s+p1s
- - i - - - i?- - -
?
¾
6
?
¾¾
6
y
126

The closed-loop transfer function from R and D to Y is
Y (s) =AKP
s2 + (AKD + p)s+ AKP
R(s) +1
s2 + (AKD + p)s+ AKP
D(s)
The characteristic equation is
CE : s2 + (AKD + p)s+ AKP
Clearly, with two controller parameters, and a 2nd order closed-loop system, thepoles can be freely assigned. Using the (ξ, ωn) parametrization, we set the charac-teristic equation to be
s2 + 2ξωns+ ω2n
giving design equations
KP :=ω2n
A, KD :=
2ξωn − pA
In terms of the (ξ, ωn) parametrization, the loop gain and transfer functions are
L(s) =(2ξωn − p)s+ ω2
n
s(s+ p)
Y (s) =ω2n
s2 + 2ξωn + ω2n
R(s) +1
s2 + 2ξωn + ω2n
D(s) (66)
Although this is a 2nd order system, and most quantities can be computed an-alytically, the formulae that arise are rather messy, and interpretation ends uprequiring plotting. Hence, we skip the analytic calculations, and simply numeri-cally compute and plot interesting properties for different values of ωn, p and ξ.Normalization is the key to displaying the data in a cohesive and minimal fashion.
For now, take p = 0 (you should take the time to write a MatLab script filethat duplicates these results for arbitrary p). In this case, it is possible to writeeverything in terms of normalized frequency, all relative to ωn. This simultaneouslyleads to a normalization in time (recall homework 8). Hence frequency responsesare plotted G(jω) versus ω
ωn, and time responses plotted y(t) versus ωnt. We
consider a few typical values for ξ.
127

The plots below are:
• Magnitude/Phase plots of Loop transfer function. These are normalizedin frequency, and show L(jω) versus ω
ωn. From these, we can read off the
crossover frequencies and margins.
xi = 0.5
xi = 0.707
xi = 0.95
xi = 1.3
10−2
10−1
100
101
102
10−2
10−1
100
101
102
103
104
Normalized Frequency (w/wn)
Mag
nitu
de
Open−Loop Transfer Function, PD
xi = 0.5
xi = 0.707
xi = 0.95
xi = 1.3
10−2
10−1
100
101
102
−180
−170
−160
−150
−140
−130
−120
−110
−100
−90
Normalized Frequency (w/wn)
Phas
e (d
egre
es)
Open−Loop Transfer Function, PD
128

• Magnitude/Phase plots of closed-loop R → Y transfer function. These arenormalized in frequency, and show GR→Y (jω) versus
ωωn.
xi = 0.5
xi = 0.707
xi = 0.95
xi = 1.3
10−2
10−1
100
101
102
10−4
10−3
10−2
10−1
100
101
Normalized Frequency (w/wn)
Mag
nitu
de
R−>Y Frequency Response, PD
xi = 0.5
xi = 0.707
xi = 0.95
xi = 1.3
10−2
10−1
100
101
102
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
Normalized Frequency (w/wn)
Pha
se (d
egre
es)
R−>Y Frequency Response, PD
129

• Magnitude plot of closed-loop D → Y These are normalized in frequencyand magnitude,, and show ω2
nGD→Y (jω) versusωωn.
xi = 0.5
xi = 0.707
xi = 0.95
xi = 1.3
10−2
10−1
100
101
102
10−4
10−3
10−2
10−1
100
101
Normalized Frequency (w/wn)
Nor
mal
ized
Mag
nitu
de, |
wn^
2 G
|
Normalized Disturbance Response, PD
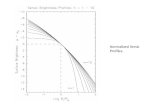
• Unit step d → y responses. These are normalized both in time, and inresponse. Hence the plot is ω2
ny(t) versus ωnt.
xi = 0.5
xi = 0.707
xi = 0.95
xi = 1.3
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
Normalized Time (wn*t)
Nor
mal
ized
Res
pons
e, w
n^2
y
Normalized Disturbance Response, PD
130

• Unit step r → y responses. These are normalized in time, and show y(t)versus ωnt.
xi = 0.5
xi = 0.707
xi = 0.95
xi = 1.3
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
Normalized Time (wn*t)
Y
R−>Y Step Response, PD
• Magnitude plot of closed-loop R → E. These are normalized in frequency,and show GR→E(jω) versus
ωωn.
xi = 0.5
xi = 0.707
xi = 0.95
xi = 1.3
10−2
10−1
100
101
102
10−2
10−1
100
101
Normalized Frequency (w/wn)
Mag
nitu
de
R−>E (Sensitivity), PD
Some things to notice.
131

• The r → y response has the canonical 2nd order response we have come toknow and love.
• The steady-state disturbance rejection properties are dependent on ωn. Asωn increases, the effect of a disturbance d on the output y is decreased.Hence, in order to improve the disturbance rejection characteristics, we needto pick larger ωn.
• Depending on ξ, the gain-crossover frequency is between about 1.3ωn and2.5ωn. So, using this controller architecture, the gain crossover frequencymust increase when the steady-state disturbance rejection is improved. Thephase margin varies between 53◦ and 83◦.
• There is no phase-crossover frequency, so as defined, the gain margin is infi-nite.
• The closer that the complex frequency response remains to 1 (over a largefrequency range), the better the r → y response. The term “bandwidth” isoften used to mean the largest frequency ωB such that for all ω satisfying0 ≤ ω ≤ ωB,
|1−GR→Y (jω)| ≤ 0.3
Be careful with the word “bandwidth.” Make sure whoever you are talkingto agrees on exactly what you both mean. Sometimes people use it to meanthe gain crossover frequency. Generally, the higher the bandwidth, the fasterthe response, and better the disturbance rejection. Of course, its hard toexplicitly assess time-domain properties from a single number about a fre-quency response, so use it carefully. The same types of intuition can also beassessed by looking at the frequency range over which the transfer functionis GR→E small, and also verifying that it is not too large in another range.
13.2 PID Control
In order to reduce the steady-state effect of the disturbance, we next analyzePID control, namely proportional+integral, with inner loop rate feedback. This isshown below.
∫
KI
KP
KD
A1
s+p1s
- i - - - i - - - i?- - -
¢¢¢
?
¾
6?
¾¾
6
-
− −ur y
d
Inner-loop Rate-Feedback
132

The open-loop transfer function is
L(s) =A(KDs
2 +KP s+KI)
s2(s+ p)
The closed-loop transfer function is
Y (s) =A(KP s+KI)
s3 + (p+ AKD)s2 + AKP s+ AKI
R(s) +s
s3 + (p+ AKD)s2 + AKP s+ AKI
D(s)
The closed-loop characteristic equation is
s3 + (p+ AKD)s2 + AKP s+ AKI
With three controller parameters, and a 3rd order closed-loop system, the polescan be freely assigned. Using the (ξ, ωn) parametrization, along with a 3rd pole at−αωn, we set the characteristic equation to be
CE : (s2 + 2ξωns+ ω2n)(s+ αωn)
Multiplied out, this gives
s3 + (2ξ + α)ωns2 + (2ξα + 1)ω2
ns+ αω3n
Choosing specific values of ξ, ωn and α yields appropriate controller gains, via thedesign equations, which are obtained by simply equating coefficients,
KD =(2ξ + α)ωn − p
A, KP =
(2ξα + 1)ω2n
A, KI =
αω3n
A
Note that for α¿ 1, the design equations giveKD andKP as in the PD case, alongwith a very small integral control term. Hence, for a given pair (ξ, ωn), picking αsmall and doing the full PID design is equivalent to doing the PD design for ξ andωn, and then simply adding a small amount of integral control as an afterthought.That approach will leave a closed-loop pole near the origin, approximately ats = −AKI
ω2n(= −αωn).
In terms of the parameters, the closed-loop transfer function is
Y (s) =(2ξα + 1)ω2
ns+ αω3n
(s2 + 2ξωns+ ω2n)(s+ αωn)
R(s) +s
(s2 + 2ξωns+ ω2n)(s+ αωn)
D(s)
The steady-state gain from d to y is zero, due to the integral term. Again, takethe case p = 0. For clarity, let’s also pick ξ = 0.707, and only study the variationin responses due to our choice of α. Again, the normalization with ωn is complete,in both time and frequency, with frequency responses plotted versus ω
ωn, and time
responses plotted versus ωnt.
133

The plots below are:
• Magnitude/Phase plots of Loop transfer function
alpha = 0.1
alpha = 0.3162
alpha = 1
alpha = 3.162
alpha = 10
10−2
10−1
100
101
102
10−2
10−1
100
101
102
103
104
105
106
107
Normalized Frequency (w/wn)
Mag
nitu
de
Open−Loop Transfer Function, PID, xi = 0.707
alpha = 0.1
alpha = 0.3162
alpha = 1
alpha = 3.162
alpha = 10
10−2
10−1
100
101
102
50
100
150
200
250
300
Normalized Frequency (w/wn)
Phas
e (d
egre
es)
Open−Loop Transfer Function, PID, xi = 0.707
134

• Magnitude/Phase plots of closed-loop R→ Y transfer function
alpha = 0.1
alpha = 0.3162
alpha = 1
alpha = 3.162
alpha = 10
10−2
10−1
100
101
102
10−4
10−3
10−2
10−1
100
101
Normalized Frequency (w/wn)
Mag
nitu
deR−>Y Frequency Response, PID, xi = 0.707
alpha = 0.1
alpha = 0.3162
alpha = 1
alpha = 3.162
alpha = 10
10−2
10−1
100
101
102
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
Normalized Frequency (w/wn)
Pha
se (d
egre
es)
R−>Y Frequency Response, PID, xi = 0.707
• Magnitude plot of closed-loop R→ E
135

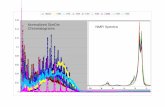
• Normalized Disturbance-to-output response
alpha = 1e−05
alpha = 0.1
alpha = 0.3162
alpha = 1
alpha = 3.162
alpha = 10
10−2
10−1
100
101
102
10−4
10−3
10−2
10−1
100
Normalized Frequency (w/wn)
| wn^
2 G
|Normalized Disturbance Response, xi = 0.707
alpha = 1e−05
alpha = 0.1
alpha = 0.3162
alpha = 1
alpha = 3.162
alpha = 10
0 1 2 3 4 5 6 7 8−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Normalized Time (wn*t)
wn^
2 y
Normalized Disturbance Response, xi = 0.707
136

• Unit step r → y responses
alpha = 0.1
alpha = 0.3162
alpha = 1
alpha = 3.162
alpha = 10
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
1.4
Normalized Time (wn*t)
YR−>Y Step Response, PID, xi = 0.707
• R→ E magnitude plots
alpha = 0.1
alpha = 0.3162
alpha = 1
alpha = 3.162
alpha = 10
10−2
10−1
100
101
102
10−4
10−3
10−2
10−1
100
101
Normalized Frequency (w/wn)
Mag
nitu
de
R−>E (Sensitivity), PID, xi = 0.707
Some things to notice.
137

• For a given ωn and α > 1, both the crossover frequencies, and bandwidth(look atGR→E) are much higher than the PD case. This is somewhat reflectedin quicker rise times and comparable settling times.
• The gain crossover frequency increases significantly with increasing α. Forinstance, at α ≈ 0 (which is the same as the PD control) the crossoverfrequency is about 1.7ωn, whereas for the crossover frequency jumps to ap-proximately ≈ 5ωn at α ≈ 3.1. At the respective crossover frequencies, thephase margins of eth PD and PID designs are similar.
• As α increases, the disturbance rejection properties change. Any (and every)α > 0 gives perfect steady-state disturbance rejection, but the time-domainand frequency domain properties for different α are quite different.
• It is instructive to calculate the residue associated with the pole at −αωn
when r(t) is a unit step. It is then fairly easy to explain the slow settlingtimes that occur for the intermediate values of α.
Remember, in typical applications, the uncertainty in the plant’s behavior increaseswith increasing frequency, so designs that lead to higher crossover frequencies usu-ally are required (for confidence) to have significantly larger phase margins. Usu-ally, for a given problem, modeling innaccuracies and unknown dynamics typicallyimpose a maximum allowable crossover frequency, regardless of phase margin.
138

Since some normalization is possible (using ωn), brute-force repeated simulationallows us to approximately compute several functions. They are functions of p,ξ and α. Here, we imagine that p is known, and fixed. We also propose to fixξ = 0.707, leaving only functions of α. In any given design situation, it may benecessary to modify the choice of ξ, and recompute. The functions are plottedbelow.
• normalized crossover frequency versus α
10−2
10−1
100
101
102
0
20
40
60
80
100Normalized Gain Crossover Frequency, xi = 0.707
wc/
wn
Alpha
139

• phase margin versus α
10−2
10−1
100
101
102
60
65
70
75
80
85
90Phase Margin, xi = 0.707
PHI
Alpha
140

• normalized rise time versus α
10−2
10−1
100
101
102
1
1.5
2
2.5
3
3.5Normalized Rise Time, xi = 0.707
Alpha
wn*
Tris
e
• normalized settling time versus α
2 percent
3 percent
4 percent
10−2
10−1
100
101
102
0
5
10
15
20
25
30Normalized Settling Time, xi = 0.707
Alpha
wn*
Tset
tle
141

• normalized peak response due to step disturbance versus α
10−2
10−1
100
101
102
0
0.2
0.4
0.6
0.8
1
1.2Normalized Peak Disturbance Response, xi = 0.707
Alpha
wn^
2 y
• normalized settling time due to step disturbance versus α
10−2
10−1
100
101
102
0
50
100
150
200
250
300
350
400Normalized Disturbance Settling (Relative), xi = 0.707
Alpha
wn*
Tset
tle
142

• percentage overshoot versus α
10−2
10−1
100
101
102
5
10
15
20
25
30
35Percent Overshoot, xi = 0.707
Alpha
% O
vers
hoot
Suppose that these have been computed reasonably accurately, at sufficiently largenumbers of α values. Can we use all of this data to develop a foolproof designmethod?
13.3 A Brute-Force Design Method
In designing the PID controller gains, the free parameters (at this point) to be cho-sen are ξ, ωn and α. For fixed choice of ξ, we can precompute functions f1, f2, . . . , f5of α such that
1. Gain crossover frequency (ωc) equals ωnf1(α)
2. Rise Time (tR) equals f2(α)/ωn
3. Settling Time (tS) equals f3(α)/ωn
4. Peak response to step disturbance (yd,max) equals f4(α)/ω2n
5. Settling time of step disturbance response (tS,d) equals f5(α)/ωn
So, given target requirements, we can fairly easily determine if there is a PIDcontroller which satisfies the objectives. Specifically, take objectives as
ωc ≤ ωc, tR ≤ tR, tS ≤ tS, yd,max ≤ yd,max, tS,d ≤ tS,d
143

where the over-bar quantities are targets. Hence we search for values of ωn and αwhich satisfy
gL(α) := max
f2(α)
tR,f3(α)
tS,
√√√√f4(α)
yd,max
,f5(α)
tS,d
≤ ωn ≤
ωc
f1(α)=: gU(α)
Hence, we simply graph the two functions gL and gU , and see if there is any valueof α where gl(α) ≤ gu(α). If so, then simply pick an α∗ for which the inequality ittrue, and pick any ω∗n such that
gL(α∗) ≤ ω∗n ≤ gU(α
∗)
Moreover, since the overshoot reaches a maximum at α = 1, and falls off on bothsides, you can easily reduce the overshoot by moving to one side of the feasibleregion.
13.4 Design Example
Consider the Lab, with single inertia, and pulley. The PD control worked reason-ably well with ωn = 25, and ξ = 0.707. This implies that a phase margin of 65◦ ata crossover frequency of 38 is adequate for stability robustness. So, in designing aPID controller, let’s aim for a crossover frequency of 38, a rise time of 0.4 seconds,settling time of 0.55 seconds, and a disturbance response settling time of 0.7 sec-onds. We’ll set the peak disturbance response at 5, which essentially makes it notrelevant, and then we could tighten down on it if we wanted.
The constraints on α and ωn are shown below
10−2
10−1
100
101
102
10−2
10−1
100
101
102
103
Alpha
wn
wn/Alpha Design Options
144

The circle is the point I chose, which MatLab tells me is
α = 0.36, ωn = 19.2
which is pretty similar to what we had working in the lab. Plots of the variousrelevant quantities
• Open-Loop gain
100
101
102
103
10−2
10−1
100
101
102
Open−Loop Gain
Frequency, rad/sec
| L(j
w) |
145

• Open-Loop Phase
100
101
102
103
100
120
140
160
180
200
220
240
260
280Open−Loop Phase
Frequency, rad/sec
Pha
se L
(j w
), de
gree
s
• Response to unit-step reference
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4Unit Step response
Time, sec
y
146

• Response to unit-step disturbance
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6x 10
−3 Unit Step disturbance response
Time, sec
y
147