10I11-IJAET1111155 Hybrid Lean

of 15
-
Upload
ijaet-journal -
Category
Documents
-
view
220 -
download
0
Transcript of 10I11-IJAET1111155 Hybrid Lean
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
1/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
107 Vol. 5, Issue 1, pp. 107-121
HYBRID LEAN-AGILE DESIGN OF MOBILE ROBOTS
Salah A.M. Elmoselhy
Fitzwilliam College, Cambridge CB3 0DG, UK
ABSTRACTDetermining how and when value is added in the mobile robot design process is problematic. Lean design and
agile design paradigms have been proposed to design robots; yet, none of them could strike a balance between
cost-effectiveness and short duration of the design process without compromising quality of performance. The
present research therefore identifies empirically the most influential mobile robot design activities and
strategies on mobile robot performance. The study has identified statistically the most positively correlated
mobile robot design activities and strategies with mobile robot performance. The study has shown that 65% of
typical mobile robot design activities and strategies are affiliated with the lean design paradigm, while the
remaining 35% are affiliated with the agile design paradigm. In addition, it has been found that 22% of the lean
mobile robot design activities and strategies and 25% of the agile mobile robot design activities and strategies
significantly with 99% reliability are among the most positively correlated design activities and strategies with
improving mobile robot performance; these particular mobile robot design activities and strategies have proved
to significantly improve mobile robot performance by more than 10%. The study shows that hybrid lean-agile
design is thus an applicable and viable mobile robots design paradigm.
KEYWORDS:Mobile Robots, Design Process, Lean Design, Agile Design
I. INTRODUCTIONLean and agile approaches have been adopted by the designers of robots for years. Lean design isvalue optimization through minimizing waste in the design process [1]. It usually leads to costreduction. According to Womack, J., et al., [2, 3] significant interest has been shown in recent years inthe idea of lean operations. More recently, a growing awareness has been established that leanprinciples can be readily transferred to the design sector [1]. The lean design process would only besuccessful if the success criterion was only cost. On the other hand, agile design is a design system
with flexible technology, qualified and trained human resources, and shared information that respondsquickly to continuous and unpredicted changes in customers needs and desires and in market demand[4]. Having this ability can make the mobile robot design process successful if the success criterion isshort lead time [5, 6].The current challenge in the design process of robots is to improve value added to customer whileshortening the robot design process duration [7] [8]. Therefore, robot designers face a dilemma thatthey need to strike a balance between robot design duration and robot performance in the most cost-effective way. Chalupnik [9, 10] recently reported that minimizing variations in performance causedby variations in uncontrollable external noise parameters or by variations in design parameters, wasinvestigated extensively. Aravinth, et al., [11] has proposed more recently minimizing variations inperformance caused by variations in internal factors in the design process of complex products, suchas failure modes. Yet, internal factors in the robot design process, such as design activities and
strategies, and their relation to robot performance have not been yet investigated empirically.Browning [12] reported that determining how and when value is added in the design process is
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
2/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
108 Vol. 5, Issue 1, pp. 107-121
problematic. Thus, the present research aims to help novel designers of mobile robots in resolving thisdilemma by identifying empirically the most influential mobile robot design activities and strategieson robot performance and by identifying the most efficient mobile robot design paradigm.This research investigates how and when value is added in the design process of mobile robots. Thepaper starts with identifying the technical attributes and design specifications of mobile robots. Aquasi experiment on the design of mobile robots is presented after that as a case study. Followingfrom this experiment, the design activities and strategies typically implemented in the mobile robotdesign process and their lean/agile classification are investigated next. The study then identifies themost influential lean mobile robot design activities and strategies and agile mobile robot designactivities and strategies on mobile robot performance. Finally, the paper investigates the most efficientdesign paradigm in the design process of mobile robots.
II. MOBILE ROBOT PERFORMANCE AND TECHNICAL ATTRIBUTESMobile robots are industrially sought for their advantages that range from reducing operating costs,improving product quality and consistency, as well as the quality of work for employees, to increasingproduction output rates, increasing product manufacturing flexibility, reducing raw materials wasteand increasing yield [13]. The recent trend in robots design is mobile robots [14]; thus, the design of
mobile robot has been chosen to be the basis of the design experiment in the present research. Thequality of mobile robots is measured against the following mobile robot performance attributes thatwere used as the rubric of evaluation in this design experiment and that were extracted from theindustrially adopted set of technical attributes of a quality mobile robot [13, 15, 16]: (1) minimumfloor space requirements for agile motion; (2) adaptable to the surroundings and capable of makingdecisions accordingly, such as in case of path irregularity, missing a junction, and encounteringobstacles [17]; (3) Capable of recognizing the position of an object; (4) Capable of controlling theforce used to grip an object; (5) Provides the flexibility for picking and depositing loads to a variety ofstation types and elevations; (6) Capable of following a no straightforward path; (7) Fast response; (8)Stability [18]; (9) Accuracy; (10) Payload capacity; (11) Reliability; (12) Maintainability; (13) Safety.The degree of striking a balance between these competing technical attributes shapes the mobile robotperformance, which in turn should be realized cost-effectively within the shortest duration of robotdesign process possible [19, 20]. These attributes have been observed in the mobile robot design quasiexperiment.
III. MOBILE ROBOT DESIGN QUASI EXPERIMENTA quasi experiment on mobile robot design was conducted based on a contest among groups of noveldesigners who were undergraduates at the Engineering Department of Cambridge University todesign, build, and test a mobile robot such that the robot carries out a set of tasks successfully within acertain timeframe. In this experiment, the novel designers were observed while designing, building,and testing their mobile robots, and were asked to respond to a questionnaire on the design activitiesand strategies they adopted. The design independent variables in this experiment were the designactivities and strategies, and the design dependent variable was the robot performance. The data that
have been collected for analysis have been collected from observations and from the responses to thequestionnaire. The following subsections elaborate on the mobile robot design experiment setup andspecification, mobile robot performance evaluation criteria, method of analysis of the experimentresults, and experimental observations and responses to the questionnaire that all have been adopted inthis mobile robot design experiment.
3.1. Mobile Robot Design Experiment Setup and Specification
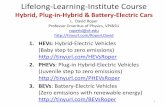
In the experimental setup of this quasi experiment, each design team was divided into three sub-teams: one for mechanical aspects, one for electronics aspects, and one for software aspects. Thedesign experiment was to design and build a mobile robot that is able to collect six pallets from aconveyor belt, B, and to transport them to one of two delivery points , D1 or D2, depending onthe type of pallet within five minutes, as illustrated in Figure 1 [21]. The task would continue until
half dozen pallets were transferred or the time limit was reached. In this experiment, the followingconditions were applied: (a) the conveyer that is indicated in light green in Figure 1 could be
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
3/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
109 Vol. 5, Issue 1, pp. 107-121
started/stopped & reversed using Light Dependent Resistor (LDR) optical switches;(b)an adjustableLight Emitting Diode (LED)-based beam suitable for driving an optical sensor, mounted just abovethe conveyer belt was available [21].
Figure 1. Mobile robot design experiment contest area topography [21]
As to the mechanical sub-system in this experiment, there was a set of resources available for thecompeting design groups. These resources available for the mechanical sub-system included: (1)transmission components such as wheels, (2) castors, (3) D.C. motors, (4) gearboxes, (5) pneumaticactuators, (6) swivel connector, (7) pneumatic valve assembly, (8) pneumatic hoses and connectors,(9) fasteners, (10) springs, (11) spur and bevel gears, (12) gear racks, (13) bearings, (14) adhesives,(15) lubricants, (16) structural materials with the availability of a workshop for processing thesestructural materials [21]. The competing design groups in the domain of electronics sub-system werealso provided with a set of resources. These resources for the electronics sub-system included: (a) I2Cbus (b) transducers, (c) LEDs, (d) ICs, (e) diodes, (f) MOSFETs, (g) capacitors, (h) resistors, (i) infrared emitter/detector assemblies, (j) infra red detector amplifier assembly, (k) potentiometers, (l) Dplugs, (m) a data sheet provides data on I/O ports of the D.C. motors, (n) PCBs, (o) soldering andcircuit construction equipment, (p) 5v power supply lead for prototyping, (q) motor/gearbox to PCB
header lead, (r) microcontroller to PCB 12v lead, (s) thermistor assembly & thermocouple materials[21]. As to the software sub-system, there was a set of resources available for the competing designgroups. These resources for the software sub-system included: (I) C++ compiler, (II) 32-bitmicrocontroller, (III) software library, (IV) power supply unit plus output lead [21]. In the simulationsetup, the competing design groups in the domain of mechanical sub-system were provided withcomputers, CAD system, and CAM system. The competing design groups in the domain of softwaresub-system were provided with computers, sensor simulation PCB, and I2C cable [21]. Having seenthis, let us now investigate the performance evaluation criteria adopted in this design experiment.
3.2. Mobile Robot Design Experiment Performance Evaluation Criteria
The robot performance evaluation criteria are collectively the mobile robot performance score basedon conducting a set of tasks, accomplishing of which needs meeting the mobile robot performance
attributes mentioned in section II, within a specific timeframe. The task to be performed by the robotwas to collect six pallets from a conveyor belt, B, and to transport them to one of two delivery
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
4/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
110 Vol. 5, Issue 1, pp. 107-121
points, D1 or D2 as illustrated in Figure 1, depending on the type of pallet within five minutes. Thetask would continue until half dozen pallets were transferred or the time limit was reached. Now, letus have a look at the method of analysis of the experiment results.
3.3 Method of Analysis of the Mobile Robot Design Experiment Results
The analysis of the mobile robot design experiment results in this research uses both descriptive
statistics and inferential statistics. In the inferential statistics part, the non-parametric-statistic tool inthe Statistical Package for Social Sciences (SPSS) is used in order to avoid making assumptions aboutthe populations parameters and consequently to improve the validity of the statistical analysis results.In order to identify which design team implemented which design activity and strategy to what extentin the experiment, a questionnaire lists the design activities and strategies and the degree of theirimplementation was constructed. In order to investigate the possible binding between some designactivities and strategies, a dependency analysis has been conducted. The assessment of how effectivewas the implementation of the design activities and strategies is implied in the correlation between theextent of their implementation and the performance score scored by the design team. The adoptedstatistical approach has the following five attributes: (1) the population is novel designers of mobilerobots; (2) the sampling frame is based on a bounded and unbiased collection of designers in whichevery single individual is identified and can be selected; (3) the data type is categorical randomvariable; (4) the sampling design is based on the probability simple random sampling because of itscost-effectiveness and reasonable accuracy; (5) the target sample size to be not less than 30 noveldesigners which is the minimum statistically representative sample size [22, 23]. This method ofassessment has been applied to the experimental observations and responses to the questionnaire.
3.4 Experimental Observations and Responses to the Questionnaire
The research observations obtained from observing the mobile robot design activities in theexperiment were further verified by including them in the questionnaire handed to the noveldesigners. The questionnaire was administered to the respondents in 2008. The responses to thequestionnaire were categorized as follows: Strongly disagree is ranked 1, Disagree is ranked 2,Agree is ranked 3, and Strongly agree is ranked 4. An average value in each column is used to fill
in the gap of empty responses as a way of manipulating responses to questionnaires [24].There were 29 design teams participating in this design experiment and a sample size of 174 could berealized which exceeds the requirement of the minimum representative sample size of 30 noveldesigners. This satisfies the first of the two criteria for the sample attribute of being representative,which are sample size and sampling design. The second criterion for the sample attribute of beingrepresentative, i.e. sampling design, was also satisfied since the sampling design in this research wasbased on probability simple random sampling which is suitable for limited generalization purposesand cost-effectively results in reasonably fair results. The pragmatic reader might now well ask: Howhave been the results analyzed? The next section will answer this question.
IV. STATISTICAL ANALYSIS OF THE RESULTSThe observations in this mobile robot design experiment have shown that there were design strategies
and activities that were commonly adopted by the entire mobile robots novel designers involved in theexperiment and there were some mobile robot design strategies and activities that were adopted onlyby some of them. The scores achieved by the design teams have shown that there were six designteams the performance of their robots was superior. A statistical analysis has been conducted for eachdesign team in order to examine whether there is correlation between their mobile robot performanceand the design activities and strategies they adopted. In the descriptive statistics a frequency analysisof the data was conducted including the mean and standard deviation. In the inferential analysis, anon-parametric statistical analysis was conducted using Spearman correlation coefficient whichprovides more rigorous results than the parametric statistical analysis [23]. This section will presentfirstly the results of analysis of Bi-variate correlation with robot performance. Secondly, frequencyanalysis of the data is presented. Thirdly, the results of the non-parametric statistical analysis and theresults of the dependency analysis are demonstrated. After that the reliability analysis results arepresented. Finally, the implication of percentage of variation in robot performance due to a designvariable (r2) is demonstrated.
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
5/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
111 Vol. 5, Issue 1, pp. 107-121
4.1 Bi-variate Correlation Between Lean and Agile Design Activities and Strategies and
Mobile Robot Performance
The ranges of statistical correlation adopted in the present research are: (1) no correlation when thecorrelation coefficient ranges from 0 to less than 0.1; (2) low correlation when the correlationcoefficient ranges from 0.1 to less than 0.3; (3) moderate correlation when the correlation coefficient
ranges from 0.3 to less than 0.6; (4) high correlation when the correlation coefficient ranges from 0.6to 1 [25]. This section presents the results related to the lean mobile robot design activities andstrategies and the agile mobile robot design activities and strategies. It has been found that 65% of thetotal mobile robot design activities and strategies are affiliated with the lean design paradigm. It hasbeen as well found with 99% reliability that 22% of these lean robot design activities and strategiessignificantly are among the most positively correlated design activities and strategies with improvingmobile robot performance; these particular mobile robot design activities and strategies have provedto significantly improve mobile robot performance by more than 10%. These moderate positivelycorrelated lean design activities and strategies with mobile robot performance are presented inAppendix A.It has been also found that 35% of the total mobile robot design activities and strategies are affiliatedwith the agile design paradigm. It has been found as well with 99% reliability that 25% of these agile
robot design activities and strategies significantly are among the most positively correlated designactivities and strategies with improving mobile robot performance; these particular mobile robotdesign activities and strategies have proved to significantly improve mobile robot performance bymore than 10%. These moderate positively correlated agile design activities and strategies withmobile robot performance are presented in Appendix B.The appendices show the most influential lean/agile design activities and strategies on mobile robotperformance, sorted in a descending order, respectively. In the appendices, the first column entitledObservation/Hypothesis presents a brief description of the design activity/strategy. The next columnin the appendices entitled Design Phase implies to which design phase, i.e. scope-based, conceptual,preliminary, and detailed design phases, the investigated design activity/strategy is related. The thirdcolumn in the appendices entitled Design Strategy /Activity shows whether the design variableunder investigation is a design strategy or design activity. The fourth column in the appendicesentitled Observation/Hypothesis elucidates whether the design variable under investigation has beenidentified due to experimental observation or by a hypothesis deduced from literature review. Thefourth column in the appendices entitled Reference in Literature to Hypothesis refers to the relevantreferences in literature for those design variables that have been identified through literature review.The last column in the appendices entitled Percentage of Variation in Mobile Robot Performance(r2) depicts the corresponding value of r2 for each design variable under investigation. Having seenthis, let us now investigate the frequency analysis of the data.
4.2 Frequency Analysis of the Data
Frequency analysis provides an insight into the descriptive statistics of the collected data and of thecategories of the collected data. This section presents the frequency analysis of the most positivelycorrelated design activity with mobile robot performance. The most positively correlated designactivity with mobile robot performance has been to have the largest number of design iterations, ifany, to occur within the software sub-system, i.e. agile design activity #1 in Appendix B. This sectionshows the frequencies and descriptive statistics of this design activity with mobile robot performance.Table 1 shows that the total valid percentage of data has been 99.4%, which is proof on valid results.The largest percentage of responses as to this design activity, i.e. 42%, has been ofAgree category,as depicted in Figure 2.
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
6/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
112 Vol. 5, Issue 1, pp. 107-121
Table 1. Frequencies and descriptive statistics of the design activity of having the largest number of iterationsin software subsystem
Frequency Percent Valid Percent
Cumulative
Percent
Valid Strongly
Disagree 12 6.9 6.9 6.9
Disagree 30 17.1 17.2 24.1
Do Not Know 24 13.7 13.8 37.9
Agree 72 41.1 41.4 79.3
Strongly
Agree36 20.6 20.7 100.0
Total 174 99.4 100.0
Missing System 1 .6
Total 175 100.0
Figure 2. Percentage of responses in each category of response to having the largest number of iterations in
software subsystem
This section paves the way to investigate whether or not there has been interdependency among thedata.
4.3 Non-parametric Analysis and dependency analysis results using Bi-variate
correlation and partial correlation analyses
In order to investigate how rigorous the bi-variate correlation analysis results are, a dependencyanalysis has been conducted. The dependency analysis explores whether or not an independentvariable, which was proven to be correlated with a dependent variable, is in turn a dependent variableon other variables. The dependency analysis in the present study is twofold. Firstly, a mutualdependency analysis based on bi-variate correlation coefficient is conducted. Secondly, a partial
correlation analysis is conducted consequently in order to control for the effect of each of the twomutually dependent variables on each other in relation to other variables.
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
7/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
113 Vol. 5, Issue 1, pp. 107-121
It has been found that there has been only pair of mobile robot design activities and strategies that hasmutual dependency. This pair is the lean mobile robot design strategy which is to adopt modulardesign, and the lean mobile robot design strategy which is to strike a balance between functionalityand design iterations. The bi-variate correlation coefficient between these two design strategies is0.711, as shown in Table 3, which plainly implies strong potential for mutual dependency, since it islarger than 0.6 [25]. Hence, a partial correlation analysis between the lean mobile robot designstrategy of adopting modular design and mobile robot performance, controlling for the lean mobilerobot design strategy of striking a balance between functionality and design iterations, has beenconducted as shown in Table 4.The results of the partial correlation analysis have shown that the effect of the later of these twodesign strategies on the relationship between the former and mobile robot performance is 0.049 asindicated in Table 4, i.e. negligible since the amount of influence is less than 5% [25]. Hence, thecorrelation coefficient between the former and robot performance remains unchanged in the lowcorrelation category. Also, a partial correlation analysis between the later of these two designstrategies and mobile robot performance, controlling for the former has been conducted as shown inTable 5.
Table 3. Result of the dependency analysisbivariate correlation
Adopting modular designSpearman's rho Striking a balance
between Functionality& Design iterations
CorrelationCoefficient -0.711
**
Sig. (2-tailed) 0.000
N 174
**. Correlation is significant at the 0.01 level (2-tailed).
Table 4. Partial correlation between the lean mobile robot design strategy of adopting modular design andnormalized performance score, controlling for the lean mobile robot design strategy of striking a balance
between functionality and design iterations
Control Variables
Adopting modular
design
SCORE-
NORMALStriking a balancebetweenFunctionality &Design iterations
Adopting modulardesign
Correlation
1.000 .049
Significance (2-tailed)
. .427
df 0 171
SCORE-NORMAL Correlation .049 1.000
Significance (2-tailed)
.427 .
df 171 0
Table 5. Partial correlation between the lean mobile robot design strategy of striking a balance betweenfunctionality and design iterations and normalized performance score, controlling for the lean mobile robot
design strategy of adopting modular design
Control VariablesSCORE-
NORMAL
Striking a balancebetween Functionality& Design iterations
Adopting modulardesign
SCORE-NORMAL Correlation1.000 .009
Significance (2-tailed)
. .890
df 0 171
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
8/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
114 Vol. 5, Issue 1, pp. 107-121
Striking a balancebetweenFunctionality &Design iterations
Correlation
.009 1.000
Significance (2-tailed)
.890 .
df 171 0
The results of the partial correlation analysis have shown that the effect of the former of these twodesign strategies on the relationship between the later and mobile robot performance is 0.009 asindicated in Table 5, i.e. negligible since the amount of influence is less than 5% [25]. Thus, thecorrelation coefficient between the later of these two design strategies and mobile robot performanceremains unchanged in the no correlation category. This might raise the following question: Howreliable are these results? This question will be addressed in the following section.
4.4 Reliability Analysis Results
In reliability statistics, if the data collected reached the level of0.7 or more on the Cronbachs Alpha
scale, the collected data has then good internal consistency[24]. Since the Cronbachs Alpha internalreliability factor of the collected data is 0.705, as shown in Table 6, there is good internal consistencyof the data, based on the average inter-item correlation.
Table 6. Reliability statistics
Cronbach's Alpha Cronbach's Alpha Based on Standardized Items N of Items
.678 .705 67
There are some assumptions based on which the reliability analysis has been conducted: (1)observations are independent; (2) errors are uncorrelated between the mobile robot design activitiesand strategies. The following section explores the implication of these results.
4.5 Implication of Percentage of Variation in Mobile Robot Performance due to aDesign Variable (r
2)
In a research project that includes several variables, it is often sought to know how one variable isrelated to another. Correlational research attempts to determine whether and to what degree, arelationship exists between two or more quantifiable variables, such as two design activities.Correlation implies prediction of the value of one variable if we know the value of the other correlatedvariable, but does not necessarily imply full causation. The reason why correlation does notnecessarily imply full causality is that a third variable may be involved of which we are not aware.However, correlational research can imply partial correlation in terms of prediction of percentage ofvariation in, for instance, variable B due to variable A [25].The correlation coefficient (r) value ranges from -1 to 1. Having correlation coefficient of a value -1
indicates perfect negative relation between the variables under examination. If the correlationcoefficient has a value of 0, there is no relation between the variables under examination. Acorrelation coefficient of a value 1 is interpreted as a perfect positive relation between the variablesunder examination. The square of the correlation coefficient (r2) represents the percentage of variationin one of the two variables under investigation due to the other correlated variable, which implies acausal link between these two variables.Causality in this research is determined according to the percentage of variation in technicalperformance due to the variable (r2) of moderate-to-high correlation coefficient (r). The mostcorrelated design activities and strategies to mobile robot performance are determined according totheir percentage of variation in technical performance due to the variable correlation coefficients withmobile robot performance, and according to their resulting p-value.The aggregation of percentage of variation in mobile robot performance due to the design variables
has reached collectively more than 100% since there is overlap in the affected areas in mobile robotperformance by the design variables. This research has shown that the design activities and strategies
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
9/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
115 Vol. 5, Issue 1, pp. 107-121
indicated in Appendix A and Appendix B, i.e. design variables, are independent except for 3% ofthem where mutual dependency has been identified as proved in the dependency analysis resultsindicated in section 4.3. This helps now in deducing the most efficient mobile robot design paradigm.
V. HYBRID LEAN-AGILE MOBILE ROBOT DESIGN PROCESSBased on the presented results, adopting both lean robot design activities and strategies and agilerobot design activities and strategies together in the mobile robot design process has been proved tobe practically valid. In addition, the design experiment has proved that both lean mobile robot designactivities and strategies and agile mobile robot design activities and strategies are correlated with andhave significant influence on improving mobile robot performance. Besides, it has been found thatthere are mobile robot design activities which have attributes of both the lean and agile designparadigms. For instance, the design activity of evaluating design concepts exhibits attributes of bothlean and agile design paradigms. This further supports the practical validity of adopting both leanmobile robot design activities and strategies and agile mobile robot design activities and strategiestogether in the mobile robot design process. Therefore, the present research proposes a hybrid lean-agile mobile robot design paradigm in which both lean mobile robot design and agile mobile robotdesign activities and strategies are adopted in the mobile robot design process benefiting from the
attributes of both the lean design and agile design paradigms.The proposed mobile robots hybrid lean-agile design pillars include: (1) adopting the most effectivelean design strategies, such as considering reliability of the mobile robot in the design process interms of the ability of the mobile robot to perform its required functions under stated conditions for aspecified robot service time, (2) adopting the most effective agile design strategies, such as havingdesigns that are less vulnerable to failure modes and are less exposed to and less sensitive to theuncontrollable external factors by shifting complexity to the software subsystem rather than to themechanical subsystem, (3) adopting the most effective lean design activities, such as adopting testabledesign inter-deliverables within and among system modules based on project milestones in order todetect mistakes as early as possible and to minimize mistakes impact on the successful completion ofthe design project, (4) adopting the most effective agile design activities, such as having iterations inthe software subsystem rather than in the mechanical subsystem in order to end up with shorterdevelopment time, (5) adopting a three-phase hybrid lean-agile risk management action plan thathelps in integrating mobile robot design activities and strategies in order to minimize risk in themobile robot design process the first phase of which is before the beginning of the mobile robotdesign process in which SWOT (i.e. Strengths, Weaknesses, Opportunities, and Threats) analysis isconducted; the second phase of this plan is during the mobile robot design process in which the designteam proves value of design concept to stakeholders at the end of each design phase ensuring that themobile robot satisfies stakeholders, fits for its intended purpose, is of a quality to last its designlifetime, and can be made at an acceptable cost; the third and last phase of this plan is after the end ofthe mobile robot design process in which Failure Modes and Effects Analysis (FMEA) is conductedand ultimately the models of mobile robots which fall short of the set target are killed off as soon asthis appears; This approach to managing risk in product design process is expected to help in realizing
the sought harmonious integration between the product development activities and strategies, (6)adopting mobile robot design functional strategy in terms of the following items: standardcomponents, modular design, communized architecture of mobile robots chassis and frame parts, andconcurrent engineering in the design process. The pragmatic reader is now invited to explore howvalid this research is.
VI. RESULTS AND DISCUSSIONThe questionnaire which has been designed to collect data for the present study has been designedwith emphasis placed on maximizing clarity of the wording of the questionnaire and minimizing theinfluence of the questionnaires problems such as bias. In order to maximize clarity of questions,clarification footnotes have been used. In addition and in order to minimize bias, a two-fold strategyhas been adopted; firstly, in order to avoid researchers bias, closed-ended questions have been used;secondly, in order to spot respondents bias, repeatedly inverted questions have been used. Thestatistical sampling in this research is representative and the experimental results are statistically
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
10/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
116 Vol. 5, Issue 1, pp. 107-121
significant with 99% reliability without making any assumptions about the population of noveldesigners of mobile robots.In this study, the reliability statistics test results, based on Spearman correlation coefficient and non-parametric statistical analysis, have proved the reliability of the data used in this research and thushave verified the results of this research. In order to investigate the validity of the results of this study,an inferential statistical analysis was conducted on the resulting correlation coefficients. The p-valuehas been adopted as a measure that a result is true to the population. A cut-off p-value of 0.1 isadopted in this research. In addition, the statistical sampling in this research is representative in termsof sampling design that is suitable for limited generalization with cost-effectively fair statisticalresults and sample size that satisfies the minimum statistically representative sample size. Causality inthis study is determined according to the percentage of variation in robot performance due to avariable (r2) of moderate-to-high correlation coefficient (r). The research results are also valid in termsof the four validity types; firstly, in terms of statistical conclusion validity, since the resultedrelationships are meaningful and reasonable; secondly, in terms of internal validity, since the resultsare causal rather than being just descriptive; thirdly, in terms of construct validity, since the resultsrepresent what is theoretically intended; fourthly, in terms of external validity, since the resultscan be limitedly generalized to the population of novel designers of mobile robots. Hence, this
research has proved the validity of the correlation between lean and agile mobile robot designactivities and strategies and mobile robot performance. In addition, it has validated the practicality ofhaving both lean mobile robot design activities and strategies and agile mobile robot design activitiesand strategies implemented in the mobile robot design process.The study has shown that 65% of typical mobile robot design activities and strategies are affiliatedwith the lean design paradigm, while the remaining 35% are affiliated with the agile design paradigm.In addition, it has been found with 99% reliability that 22% of the lean mobile robot design activitiesand strategies and 25% of the agile mobile robot design activities and strategies significantly areamong the most positively correlated design activities and strategies with improving mobile robotperformance; these particular mobile robot design activities and strategies have proved to significantlyimprove mobile robot performance by more than 10% and thus should receive the highest priority ofbeing assigned design process resources. Thus, the study has shown that with 99% reliability more
than 10% of the variation in mobile robot performance can be explained by adopting a hybrid lean-agile mobile robot design paradigm that adopts both lean mobile robot design activities and strategiesand agile mobile robot design activities and strategies together in the mobile robot design process.Hence, adopting a hybrid lean-agile mobile robot design paradigm is technically valid.
VII. CONCLUSIONThis paper has determined how and when value is added in the mobile robot design process byidentifying empirically the most influential mobile robot design activities and strategies on mobilerobot performance. The paper has identified first the key technical attributes of mobile robots.Secondly, the research methodology and statistical analysis have helped in identifying the causalrelationships between the lean and agile mobile robot design activities and strategies and mobile robot
performance, as presented in Appendices A and B. Finally, the research methodology and statisticalanalysis have helped as well in proving that adopting both lean mobile robot design activities andstrategies and agile mobile robot design activities and strategies in the mobile robot design process ispractically valid.The proposed mobile robots hybrid lean-agile design pillars include: (1) adopting the most effectivelean design strategies, (2) adopting the most effective agile design strategies, (3) adopting the mosteffective lean design activities, (4) adopting the most effective agile design activities, (5) adopting athree-phase hybrid lean-agile risk management action plan in order to minimize risk in the mobilerobot design process the first phase of which is before the beginning of the mobile robot designprocess in which SWOT (i.e. Strengths, Weaknesses, Opportunities, and Threats) analysis isconducted; the second phase of this plan is during the mobile robot design process in which the designteam proves value of design concept to stakeholders at the end of each design phase ensuring that the
mobile robot satisfies stakeholders, fits for its intended purpose, is of a quality to last its designlifetime, and can be made at an acceptable cost; the third and last phase of this plan is after the end of
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
11/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
117 Vol. 5, Issue 1, pp. 107-121
the mobile robot design process in which Failure Modes and Effects Analysis (FMEA) is conductedand ultimately the models of mobile robots which fall short of the set target are killed off as soon asthis appears; This approach to managing risk in product design process is expected to help in realizingthe sought harmonious integration between the product development activities and strategies, (6)adopting mobile robot design functional strategy in terms of the following items: standardcomponents, modular design, communized architecture of mobile robots chassis and frame parts, andconcurrent engineering in the design process.The study has shown that 65% of typical mobile robot design activities and strategies are affiliatedwith the lean design paradigm, while the remaining 35% are affiliated with the agile design paradigm.In addition, it has been found with 99% reliability that 22% of the lean mobile robot design activitiesand strategies and 25% of the agile mobile robot design activities and strategies significantly areamong the most positively correlated design activities and strategies with improving mobile robotperformance; these particular mobile robot design activities and strategies have proved to significantlyimprove mobile robot performance by more than 10% and thus should receive the highest priority ofbeing assigned design process resources. Thus, the study has shown that with 99% reliability morethan 10% of the variation in mobile robot performance can be explained by adopting a hybrid lean-agile mobile robot design paradigm that adopts both lean mobile robot design activities and strategies
and agile mobile robot design activities and strategies together in the mobile robot design process.Hence, adopting a hybrid lean-agile mobile robot design paradigm is technically valid.
VIII. FUTURE WORKThe present research exhibits further investigation of the validity of these results using a larger samplesize that is large enough to represent the whole population of novel designers of mobile robots. Inaddition, it exhibits further investigation of the pillars and validity of the proposed hybrid lean-agilemobile robot design paradigm in an industrial setting. Moreover, the conclusions indicated herein canbe used to guide another new experiment to see if the results would be improved.
ACKNOWLEDGEMENT
The people of the Cambridge Engineering Design Centre, Cambridge University, are acknowledgedfor their help in accomplishing this work.Also, the support of this research provided by the EPSRCunder IMRC grant number EP/E001777/1 and by Cambridge Overseas Trust is acknowledged.
REFERENCES
[1]. Baines, T., Lightfoot, H., Williams, G.M., Greenough, R., (2006) State-of-the-art in leandesign engineering: a literature review on white collar lean,Proceedings of the Institution of
Mechanical Engineers, Part B: Journal of Engineering Manufacture, Vol. 220, pp1539-1547.
[2]. Womack, J., Jones, D., Roos, D., (1990) The machine that changed the world, New York:Macmillan.
[3]. Womack, J.P., Jones, D.T., (1996)Lean thinking, New York: Simon and Schuster.[4]. Yusuf, Y.Y., Sarhadi, M., Gunasekaran, A., (1999) Agile manufacturing: the drivers,concepts and attributes,International Journal of Production Economics, Vol. 62, pp33-43.
[5]. Clemson, B., Alasya, D., (1992) Implement TQM and CIM together,Proc. InternationalEngineering Management Conference, IEEE Engineering Management Society, New York.
[6]. Maul, R., Tranfield, D., (1992) Methodological approaches to the regeneration ofcompetitiveness in manufacturing, Proc. 3rd International Conference on Factory 2000,
IEE, UK, pp12-17.[7]. Baxter, M.R., (1995) Product design: practical methods for the systematic development of
new products, Chapman and Hall.[8]. Annappa, C.M., Panditrao, K.S., (2012) Application of value engineering for cost reduction
a case study of universal testing machine, International Journal of Advances in
Engineering & Technology, Vol. 4, No. 1, pp. 618-629.[9]. Chalupnik, M.J., Eckert, C.M., Clarkson, P.J., (2006) Modelling design processes to
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
12/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
118 Vol. 5, Issue 1, pp. 107-121
improve robustness, Proc. 6th Integrated Product Development Workshop, IPD 2006,Schonebeck/Bad Salzelmen b. Magdeburg, Germany.
[10]. Chalupnik, M.J., Wynn, D.C., Eckert, C.M., Clarkson, P.J., (2007) Understanding designprocess robustness: a modelling approach, Proc. 16th International Conference on
Engineering Design (ICED'07), Paris, France, pp455-456.[11]. Aravinth, P., Muthu Kumar, T., Dakshinamoorthy, A., Arun Kumar, N., (2012) A criticality
study by design failure mode and Effect analysis (FMEA) procedure in LINCOLN V350PRO welding machine,International Journal of Advances in Engineering & Technology,Vol. 4, No. 1, pp611-617.
[12]. Browning, T.R., Deyst, J.J., Eppinger, S.D., (2002) Adding value in product developmentby creating information and reducing risk,IEEE Transactions on Engineering Management,Vol. 49, No. 4, pp443-458.
[13]. ABB Robotics Product Guide, (2008)http://www.abb.com/product/ap/seitp327/cc4949febe7dcfe9c12573fa0057007a.aspx.
[14]. Christensen, H.I., Dillmann, R., Hgele, M., Kazi, A., Norefors, U., (July 2008) Europeanrobotics,European Robotics Forum.
[15]. Fanuc Robotics, M410 ib series, Product Guide, (2008)
http://www.fanucrobotics.com/file_repository/fanucmain/m-410iB%20Series.pdf.[16]. HK Systems, Automated Guided Vehicles, HK30/F, Product Guide, (2008)http://www.hksystems.com/agv/forked-vehicles.cfm?m=2&s=3.
[17]. Alipour, K., Moosavian, S.A.A., Bahramzadeh, Y., (2008) Dynamics of wheeled mobilerobots with flexible suspension: analytical modelling and verification,International Journalof Robotics and Automation, Vol. 23, No. 4, pp242-250.
[18]. Moosavian, S.A.A., Alipour, K., (2007) On the dynamic tip-over stability of wheeledmobile manipulators,International Journal of Robotics and Automation, Vol. 22, No. 4,pp322-328.
[19]. Liu, D., Deters, R., Zhang, W.J., (August 2009) Architectural design for resilience,Enterprise Information Systems, pp1-16.
[20]. Otto, K.N., Antonsson, E.K., (1991) Trade-Off Strategies in Engineering Design,Research
in Engineering Design, Vol. 3, No. 2, pp87-104.[21]. Cambridge Universitys Engineering Department (CUED), (2007) Second Year
Undergraduate Integrated Design Project, Cambridge University Press.[22]. Alder, H.L., Roessler, E.B., (1962)Introduction to probability and statistics, W.H. Freeman
and Company.[23]. Wackerly, D.D., Mendenhall, W., Scheaffer, R.L., (1996) Mathematical statistics with
applications, Duxbury Press.[24]. Sekaran, U., (2003)Research methods for business, John Willey & Sons, Inc.[25]. Cohen, J., (1988) Statistical power analysis for the behavioural sciences , New York:
Academic Press.[26]. PrabhakarMurthy, D.N., Rausand, M., sters, T., (2008) Product reliability: specification
and performance, Springer.
[27]. Coulibaly, A., Houssin, R., Mutel, B., (2008) Maintainability and safety indicators at designstage for mechanical products,Computers in Industry, Vol. 59, No. 5.
[28]. Yavuz, H., (2007) An integrated approach to the conceptual design and development of anintelligent autonomous mobile robot,Robotics and Autonomous Systems, Vol. 55, pp498512.
[29]. Lvrdy, V., Browning, T.R., (2005) Adaptive test process designing a project plan thatadapts to the state of a project,INCOSE Publications.
[30]. Huang, C., (2000) Overview of modular product development,Proc. of National ScienceCouncil, ROC(A), Vol. 24, No.3, pp149-165.
[31]. Clark, K.B., Baldwin, C.Y., (2000) Design rules. Vol. 1: The power of modularity,Cambridge, Massachusetts: MIT Press.
[32]. Amon, C.H., Finger, S., Siewiorek, D.P., Smailagic, A., (1995) Integration of designeducation, research and practice at Carnegie Mellon University: a multi-disciplinary coursein wearable computer design,Proc.Frontiers in Education Conference, IEEE, Vol. 2, pp14-
http://www.abb.com/product/ap/seitp327/cc4949febe7dcfe9c12573fa0057007a.aspxhttp://www.abb.com/product/ap/seitp327/cc4949febe7dcfe9c12573fa0057007a.aspxhttp://www.fanucrobotics.com/file_repository/fanucmain/m-410iB%20Series.pdfhttp://www.fanucrobotics.com/file_repository/fanucmain/m-410iB%20Series.pdfhttp://www.hksystems.com/agv/forked-vehicles.cfm?m=2&s=3http://www.hksystems.com/agv/forked-vehicles.cfm?m=2&s=3http://www.hksystems.com/agv/forked-vehicles.cfm?m=2&s=3http://www.fanucrobotics.com/file_repository/fanucmain/m-410iB%20Series.pdfhttp://www.abb.com/product/ap/seitp327/cc4949febe7dcfe9c12573fa0057007a.aspx -
7/31/2019 10I11-IJAET1111155 Hybrid Lean
13/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
119 Vol. 5, Issue 1, pp. 107-121
22.[33]. Pahl, G., Beitz, W., (1998)Engineering design: a systematic approach, Springier-Ver-. Ag.[34]. Court, A.W., (1998) Issues for integrating knowledge in new product development:
reflections from an empirical study,Knowledge-Based Systems, Vol. 11, pp391398.[35]. Bernard, R., (1999) Early evaluation of product properties Within the integrated product
development, SHAKER VERLAG.[36]. Browning, T.R., Fricke, E., Negele, H., (2005) Key concepts in modelling product
development processes,Wiley InterScience, pp104-128.[37]. Krishnan, V., (1998) Modeling ordered decision making in product development,European
Journal of Operational Research, Vol. 111, No. 2, pp351-368.[38]. Pearce, R.D., (1999) Decentralised R&D and strategic competitiveness: globalised
approaches to generation and use of technology in multinational enterprises MNEs,ResearchPolicy, Vol. 28, pp157178.
APPENDIX A
Moderate Positively Correlated Lean Activities and Strategies with Mobile Robot Performance
Observation/Hypothesis Design Phase Design
Strategy
/Activity
Observation
/Hypothesis
Reference
in
Literature
to
Hypothesis
Percentage
of Variation
in Mobile
Robot
Performance
(r2)
1. Considering reliability of the mobilerobot in the design process, in terms ofthe ability of the mobile robot to performits required functions under statedconditions for a specified robot servicetime;
Conceptual &Preliminarydesign phases
Strategy Hypothesis [26, 27] 0.2**
2. Aiming at striking a balance between
fast response on one hand and stability,accuracy, and payload fulfilment of themobile robot final concept on the otherhand;
Conceptual &
Preliminarydesign phases
Strategy Hypothesis [28, 15] 0.11**
3. Adopting the simplest design, thatmeets the design problem requirementsspecification using the minimum set andmost effective combination of systemcomponents, rather than the cheapestdesign and rather than the lightest weightdesign;
Conceptual &Preliminarydesign phases
Strategy Observation N/A 0.1**
4. Adopting testable design inter-deliverables within and among systemmodules based on project milestones, in
order to detect mistakes as early aspossible and to minimize mistakes impacton the successful completion of thedesign project;
Preliminary &Detailed designphases
Activity Hypothesis [29, 30] 0.2**
5. Adopting early verification andvalidation of the design concept, e.g.early testing in the design process, inorder to avoid becoming trapped inincompetent design concepts;
Conceptual &Preliminarydesign phases
Activity Observation N/A 0.11**
6. Given the intertwined and overlappingnature of the subsystems of the mobilerobot, e.g. the mechanical-electronicsinterconnection for robot speed, adoptingmodular deliverables and testing, i.e.
testing deliverables of each module,rather than sub-systems deliverables andtesting;
Preliminary &Detailed designphases
Activity Hypothesis [31] 0.11**
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
14/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
120 Vol. 5, Issue 1, pp. 107-121
7. Having a multi-disciplinary team ofnovel designers, each of whom is moreaware of more than one of relevantdisciplines such as material science,design development approaches,leadership skills, ..etc., and is more awareof the overlap and intersections between
them, in order to improve the opportunityof ending up with a better design, and tominimize the risk of mistake occurrence;
Phase of DesignScope
Activity Hypothesis [32] 0.1**
8. Setting an operational design strategyof modular testing, i.e. testing thedeliverables between the system sub-modules as a way of verifyingconformance of these system sub-modules to the conceptual functionalrequirements, in order to detect mistakesas early as possible and to minimizemistakes impact on the successfulcompletion of the design project;
Conceptual &Preliminarydesign phases
Strategy Hypothesis [29] 0.1**
9. Documenting the outcome of design
discussions and consequently analyzingthat outcome;
Conceptual &
Preliminarydesign phases
Activity Hypothesis [33] 0.1**
10. Meeting up collectively in theconceptual design phase than in detaileddesign phase;
Conceptual &Detailed designphases
Activity Hypothesis [34] 0.1**
11. Starting the design process as early aspossible in the project timeframe andassigning sufficient time for presentingthe outcome of the design processmilestones;
Phase of DesignScope &Conceptualdesign phase
Activity Observation N/A 0.1**
12. Checking accuracy of manufacturingand assembly of the final prototype, in
order to avoid unexpected failure due tomanufacturing defects and/or assemblymistakes;
Detailed designphase
Activity Hypothesis [31] 0.1**
13. Adopting quick testing of inter-deliverables between the modules of thesoftware draft code, and extensive testingof the overall software draft code on aprototype PCB or on an equivalentfacility at the end of the project, in orderto strike a balance between minimizingcost of test and detecting mistakes asearly as possible.
Preliminary &Detailed designphases
Activity Hypothesis [29] 0.1**
**. Correlation is significant at the 0.01 level (2-tailed).
Appendix BModerate Positively Correlated Agile Activities and Strategies with Mobile Robot Performance
Observation/Hypothesis Design Phase Design
Strategy
/Activity
Observation
/Hypothesis
Reference
in
Literature
to
Hypothesis
Percentage of
Variation in
Mobile Robot
Performance
(r2)
1. Shifting complexity towards thesoftware subsystem, rather than towardsthe mechanical subsystem, in order tohave the largest number of designiterations, if any, to occur within thesoftware sub-system, followed
Preliminary &Detaileddesign phases
Activity Observation N/A 0.25**
-
7/31/2019 10I11-IJAET1111155 Hybrid Lean
15/15
International Journal of Advances in Engineering & Technology, Nov. 2012.
IJAET ISSN: 2231-1963
121 Vol. 5, Issue 1, pp. 107-121
accordingly by the electronics subsystemnumber of iterations;
2. Having iterations in the softwaresubsystem, rather than in the mechanicalsubsystem, in order to end up with shorterdevelopment time;
Preliminary &Detaileddesign phases
Activity Observation N/A 0.25**
3. Having designs that are less vulnerable
to failure modes (e.g. out-of-planebuckling, roll mode and pitch modeinstability, and friction wear) (andconsequently have better reliability) andare less exposed to and less sensitive tothe uncontrollable external factors (andconsequently had better robustness), byshifting complexity to the softwaresubsystem rather than to the mechanicalsubsystem;
Conceptual &
Preliminarydesign phases
Strategy Observation N/A 0.2**
4. Having less constraints on the designby shifting complexity to the softwaresubsystem and consequently to the virtualspace, e.g. data processing time, rather
than to the mechanical subsystem andconsequently to the physical space, e.g.suspension space;
Conceptual &Preliminarydesign phases
Strategy Observation N/A 0.2**
5. Adopting top-down system structuredecomposition in order to analyze thefunctional structure of the mobile robotand consequently to map this functionalstructure of the mobile robot to therequirements specification andconsequently to come up with the mobilerobot functional requirements;
Phase ofDesign Scope
Activity Hypothesis [35] 0.1**
6. Having resources provisions forunforeseen troubles, in order to minimizevulnerability of our design development
process to the influence of externalfactors;
Phase ofDesign Scope
Strategy Hypothesis [36] 0.1**
7. Adopting a decentralised decisionmaking strategy, by empowering sub-teams to be authorised to make tacticaldecisions without need to refer them tothe team leader, rather than strategicdecisions that can degrade performance inthis case;
Conceptual &Preliminary &Detaileddesign phases
Strategy Hypothesis [37, 38] 0.1**
8. Making a prediction of the progressivefailure of the design through drawingsketches or through conducting a finiteelement analysis, in order to avoidunexpected failure.
Conceptual &Preliminarydesign phases
Activity Observation N/A 0.1**
**. Correlation is significant at the 0.01 level (2-tailed).
AUTHORS BIOGRAPHY
Salah A.M. Elmoselhy holds MS in mechanical design and production engineering that hereceived from Cairo University. He holds as well MBA in international manufacturingbusiness that he received from Maastricht School of Management (MSM). He has ten years ofindustrial experience in CAD/CAM and robotised manufacturing systems. He has beenrecently a researcher at the Engineering Department and Fitzwilliam College of CambridgeUniversity from which he received a Diploma of postgraduate studies in engineering design.He is currently a PhD Candidate in mechanical engineering working with the InternationalIslamic University Malaysia (IIUM) and the Center for Sustainable Mobility at VirginiaPolytechnic Institute and State University (Virginia Tech).


![[Lean 101] Introduction to Lean - Preparing a Lean Canvas](https://static.fdocuments.net/doc/165x107/58f160751a28abf1658b4621/lean-101-introduction-to-lean-preparing-a-lean-canvas.jpg)