かんたん講座 格安スマホ (MVNO) とは何か - JAIPAかんたん講座 格安スマホ(MVNO)とは何か 〜 携帯会社との違いと活 法〜 2017年10 般社団法
Upload
kit-cognitive-interaction-designCategory
view
541download
0
Ŭ3¥űœŗůşŪƧƽơƣƽŬŮŧŤŰŗŎŊ�
ƽ3¥ƇƻƛƶƐƖƵƻůŖśƀÃ�¹ƖƑƣƸŰ�&Ŭø¾�

ƽ��ƇƻƛƽƩƉƇƘ�
�*ŮĎ$ŬşŪŰ��
ƃ�đŔƿŒƀsAūŰ�}ŦŰ�¤ǀ
�P"Ů~�ŻsDƃûŸƀ�

ƄŮŹŰ4xů.ŧŤŧŪ
ŖŹŦźşŗūřŮœ�

ŮŢ ƽ3¥ƃ¿ÊLJ�
• ŬTµ5ŞƁŤ3¥ű�6cůƂŤŧŪōƧƽơƣƽŬşŪō ű3¥ƃ�œō3¥ű ůV°şŪ°řŪœƀŎ
• Ŭ Źœů�NşŪ°řŪœƀ→Ã�• Ŭ ŰH>ůűŐòùőŬœŔsp·ĉŻpßŰŤŸŰĎ$Ř�ŕƀ
• Ŭ3¥ű�çŻïÚÍŐÃ�¹ƖƑƣƸőůŽŧŪōsDƃ�QşōsDƃ��şŒœŮŘžĚ�qƃ�ÐƼØ}ŠƀŝŬŘūřƀŎ�

ó´¬Űi-'|Ŭċ��¿Êğ»1Dž dž ƇƻƛƶƐƖƵƻŰ'�
A01¬Džv ?JA02¬Dž ]¥ƃ�şŤ�Mę Ű�àƳƠƸŰ�À5�
¿Êğ»2Dž dž3¥ƇƻƛƶƐƖƵƻŰ'�ŋB01¬½ĒoOÞůŽƀ�àƳƠƸŰªmŰ�À5�
¿Êğ»3Dž ]¥ƠƕƇƻŰÀËŬ¯I¾áŰR
C01¬Dž ]¥ƠƕƇƻ��ýŰÀËC02¬Dž ŰĒoqƃ�ŕƀ¯I¾áƖƘƟƱŰ�Ð�
�A01,A02¬� B01¬�
C01,C02¬�
−3¥ƇƻƛƶƐƖƵƻŬűŮůŗŘƂŗƁŲ..�

Human-animalinterac7on�
.�
»¹DžĞòùƇƻƛƶƐƖƵƻŰ�ĀŬű�ŗƃ¾ƀ
• ƨơLj3¥ƇƻƛƶƐƖƵƻůŖśƀÃ�¹ƖƑƣƸŬű�ŗ?
• Ã�¹ƖƑƣƸůŽƀŐsD�ďőűŭŰŽŔů¸ƼOÞŞƁƀŗLJ�
�
• ƨơűŭŰŽŔŮƖƑƣƸƃ&şō3¥ű<UŠƀŗLJ• 3¥űŭŰŽŔŮƖƑƣƸƃ&şōƨơű<UŠƀŗLJ�
• 3¥űƨơůsDƃ�ŕƀé3ƃŠƀŗLJ• ƨơŬ3¥Ű:�ūŭŰŽŔŮƖƑƣƸŘOÞůŽŧŪªmŞƁƀŗLJ
• ţŰOÞŰčÈůō#ĉ9®űLJ

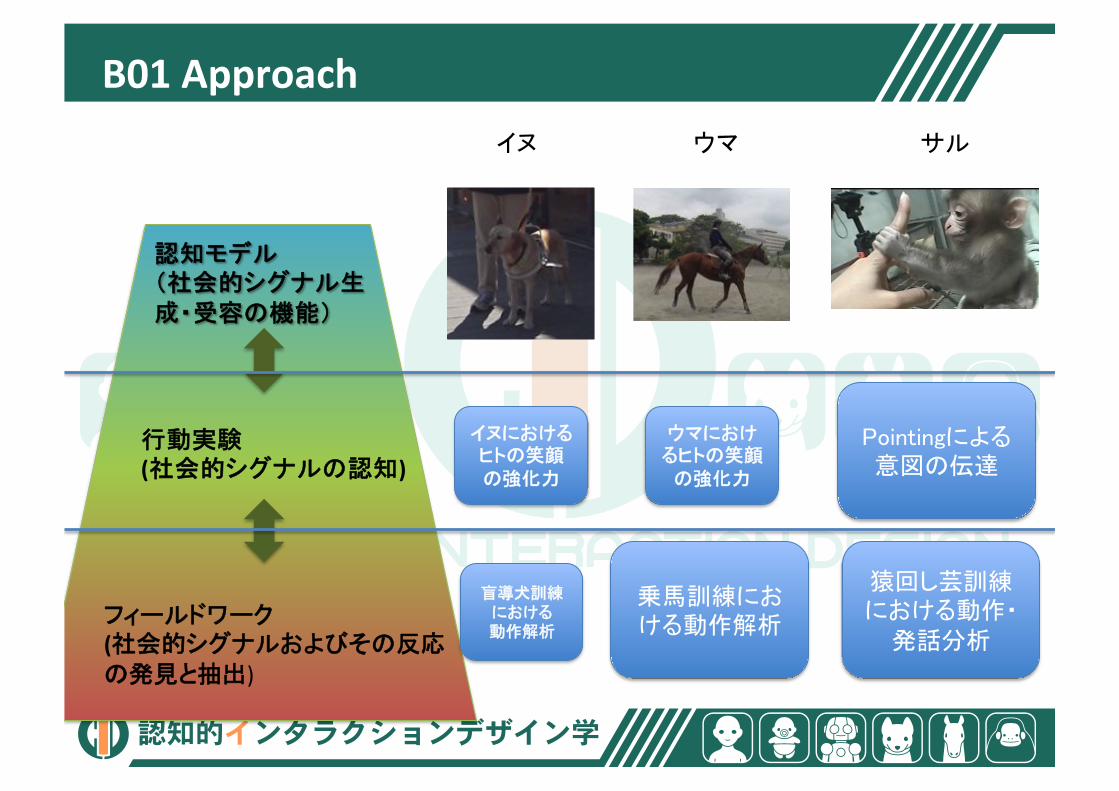
ƨơLj3¥ŰÃ�¹ƖƑƣƸŰ{&�
ƈƯƼƇƤDžŐTµ5őŞƁŤ3¥• ŬŰƇƻƛƶƐƖƵƻŘūřƀqĀƃ}ŧŤ3¥ƃĔy• Č5¹ůű ŬűĐœ
ƔƸDžŐTµ5őŞƁŪœŮœ3¥• ƇƻƛƶƐƖƵƻƃôÛůŽŧŪªm• Č5¹ů ůĆœ�
�
Dog(¼Y§ǀŌŌ/ŌHorse(Ħê)ŌŌ/ŌŌMonkey(©Cşǀ
�
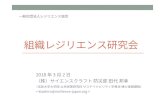
Basisofhuman-machineinteracConApplicaConfortrainerUnderstandingnon-verbalcommunicaCon�
B01Road-map�CogniCvemodelingofhuman-animalinteracConanditsmodel-basedanalysis�
�àƳƠƸ�
Decision�
�àƳƠƸ�
sp�Q�
�àƳƠƸ�
sp�Q�
�àƳƠƸ�
Decision�
�àƳƠƸ�
sp�Q�
�àƳƠƸ�
sp�Q�
SocialSignals
DataacquisiConofbehaviorinrealworld�
ExperimentofSocialcogniConandlearning�
InteracConlearningmodel�
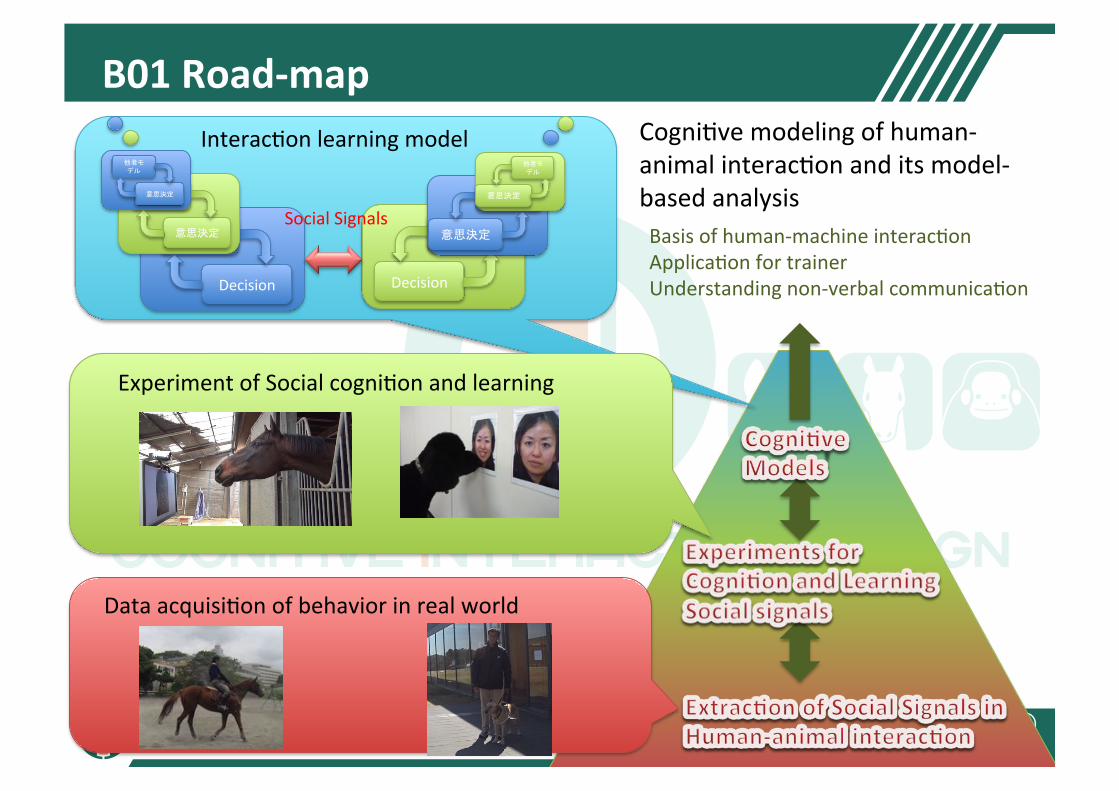
B01Approach�
ƩƆƽƸƢƺƽƐ(Ã�¹ƖƑƣƸŖŽųţŰ;o
۸îŬ{&)
é3RĨ
(Ã�¹ƖƑƣƸŰø¾)
�
ø¾ƳƠƸ
ƿÃ�¹ƖƑƣƸ°vƼ<UŰ�áǀ
�
�ĦôÛůŖśƀ3�ñ��
©CşæôÛůŖśƀ3�Ƽ¸÷'��
ƈƯůŖśƀƨơŰÌĤŰg50
ĴŁĽŀńĽŀĻůŽƀsDŰ�ď
ƇƤůŖśƀƨơŰÌĤŰg50
¼Y§ôÛůŖśƀ3�ñ�
ƇƤ ƈƯ� ƔƸ�

B01Approach�
ƩƆƽƸƢƺƽƐ(Ã�¹ƖƑƣƸŖŽųţŰ;o
۸îŬ{&)
é3RĨ
(Ã�¹ƖƑƣƸŰø¾)
�
ø¾ƳƠƸ
ƿÃ�¹ƖƑƣƸ°vƼ<UŰ�áǀ
�
�ĦôÛůŖśƀ3�ñ��
©CşæôÛůŖśƀ3�Ƽ¸÷'��
ƈƯůŖśƀƨơŰÌĤŰg50
ĴŁĽŀńĽŀĻůŽƀsDŰ�ď
ƇƤůŖśƀƨơŰÌĤŰg50
¼Y§ôÛůŖśƀ3�ñ�
ƇƤ ƈƯ� ƔƸ�

3¥ôÛůŖśƀ½OÞ�
Cme
Mutuallearning
Inhuman-animal
interac7on
Human(Trainer)�
Animals(Learner)�
Explora7on�Selectedimportantsignals
~commands� Convergenceof
“Commands”
Variousbehavior� Selectedimportantbehavior� Convergenceof
Behavior�
Learningother’smentalmodel
AssociaConbetweencommandsandbehavior�
ĵĺņķłĹĪŃŇŃńĺĿ�l ĴłĽĿķłŇĪłĺņķłĹĪıĪ�IJŁŁĹƼņķńĺł�
l ĶĺĸŁŀĹķłŇĪłĺņķłĹĪ�ĶŁĸĽķľĪŃĽĻŀķľŃĪķŃĪňĻŁŁĹʼn�
��
Howhuman-commandsandanimal-behaviorwerechangedthroughmutual-learning?�
ƔƸôÛū½OÞűð¤ŞƁƀŗLJ�
���º�K´�
��}D5m|<o@BvK�KnJtuKvR¡AP5®�<9PMFTYR�OI:�
���TY8j4Zk��l|2l�u|�� �����!������ ���Xd�� ��
������¶[b_�������K��2�³y²�w�u¶�
ºƼ\³ƿ`�ÅOLǀŬŰ#?¿Ê�

¸÷ēÇÀ«Ű8Ñ5ƼQF5�
¸÷ۨtēÇƑƶƩűíĜ5Ŭ8Ñ5ƃÜſćşŮŘžkŏů8Ñ5ƼQF5�
Session(day)�
ùh��
ùhęēÇ�

ŶŬŸǂDž3¥ôÛůŖśƀ½OÞ�
©CşæŐ�ÂőŰôÛ• 3¥Űv1«ůlŧŪƨơŰv1«Ź��
• ƨơ�Á3�ű�P"ŮŹŰŗžP"Ů3�Ŵ• ôÛůŽŧŪ3�Ű?�qŘ��
• ôÛŰ×�ŬşŪŰ�¤qŰ@�• ôÛƃŠƀěŰ��ƿôÛƛƇƪǀŰK5• ¸÷Űùh�ŬùhęēÇŰ£Z
• 3¥ŰƧƩƋƽƯƻƘůŽŧŪƨơŰé3w¶K5• ƒƯƻƢŻƩƆƽƢƦƞƐŰÉĥƃöéĘúůŽŧŪ8Ñ5şō�Õ¹Ůæů²œƀƖƑƣƸƃ½OÞ
öéƫƽƘŰñ�ĪŬŌƳƠƸ5:• w¶Ż¸÷K5→3�ŰK5• 3�ƧƩƋƽƯƻƘŰK5→w¶Ƽ¸÷K5• ½g5OÞŬşŪŰQe5
�

B01Approach�
ƩƆƽƸƢƺƽƐ(Ã�¹ƖƑƣƸŖŽųţŰ;o
۸îŬ{&)
é3RĨ
(Ã�¹ƖƑƣƸŰø¾)
�
ø¾ƳƠƸ
ƿÃ�¹ƖƑƣƸ°vƼ<UŰ�áǀ
�
�ĦôÛůŖśƀ3�ñ��
©CşæôÛůŖśƀ3�Ƽ¸÷'��
ƈƯůŖśƀƨơŰÌĤŰg50
ĴŁĽŀńĽŀĻůŽƀsDŰ�ď
ƇƤůŖśƀƨơŰÌĤŰg50
¼Y§ôÛůŖśƀ3�ñ�
ƇƤ ƈƯ� ƔƸ�

Dataacquisi7onofsocial/physiologicalsignals�
Observingbehavioralandphysiologicalsignalsinhumansandanimals
�Eyemovement/Vocal/video
MoConcapturing�
Physiologicaldataƿheartbeat/body(face)temperature/EMGǀ

Dataacquisi7onofsocial/physiologicalsignals�
�7ăŰƳƽƖƵƻƏƴƪƝƴ�
HeadmountƍƲƶůŽƀïÚ�
�ãƿ�ã,ãǀŰÎĝD
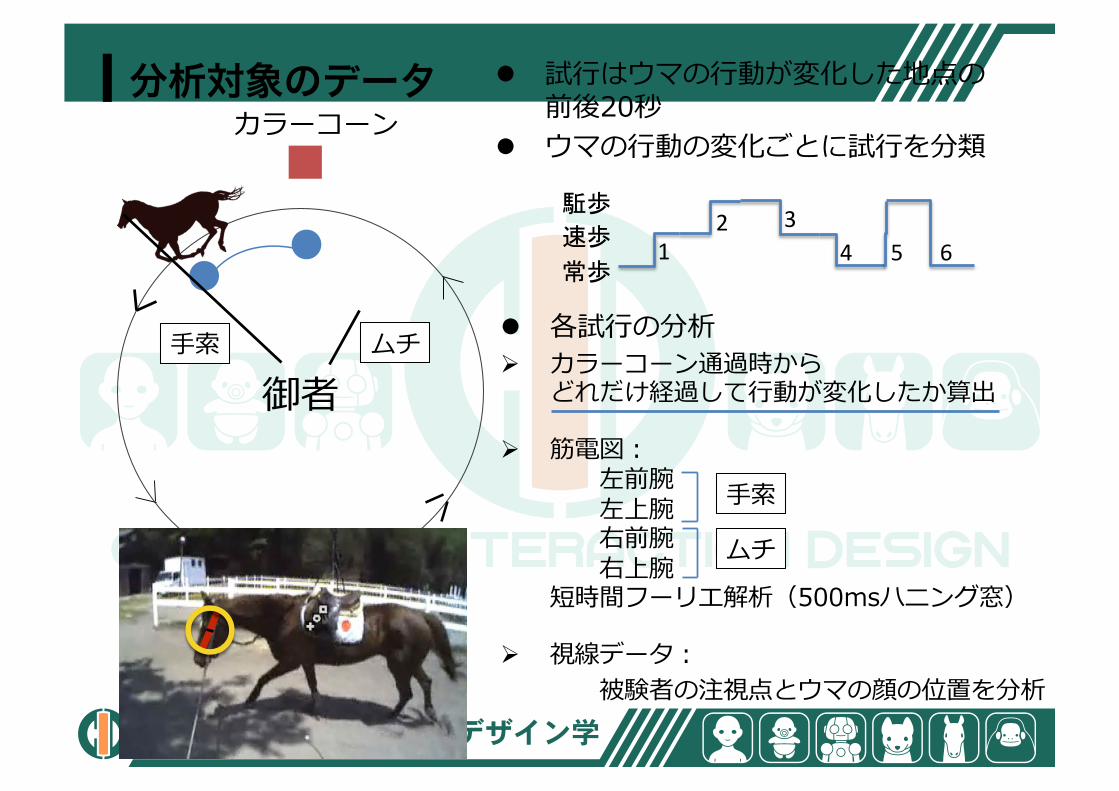
分析対象のデータ Ug4X4k�
�
¬r�
l �qLSdKq�<��@Bx�K�{z� �
l SdKq�K��>GJ�qRu«��
�
l ��qKu¶�Ø Ug4X4k~�y;O�
HQC=��@Eq�<��@B;�o�
Ø µ�§3��1 �¨{·�1 �¨n·��11ª{·��11ªn·�°y|b4hT�¶6�',a`kW¹7�
Ø ¢�^4\3��£¥rK¤¢�GSdKK��Ru¶�
v¸�
f]�
v¸� f]�
b��
Ċ��
ħ��
1�2� 3�
4� 5� 6�

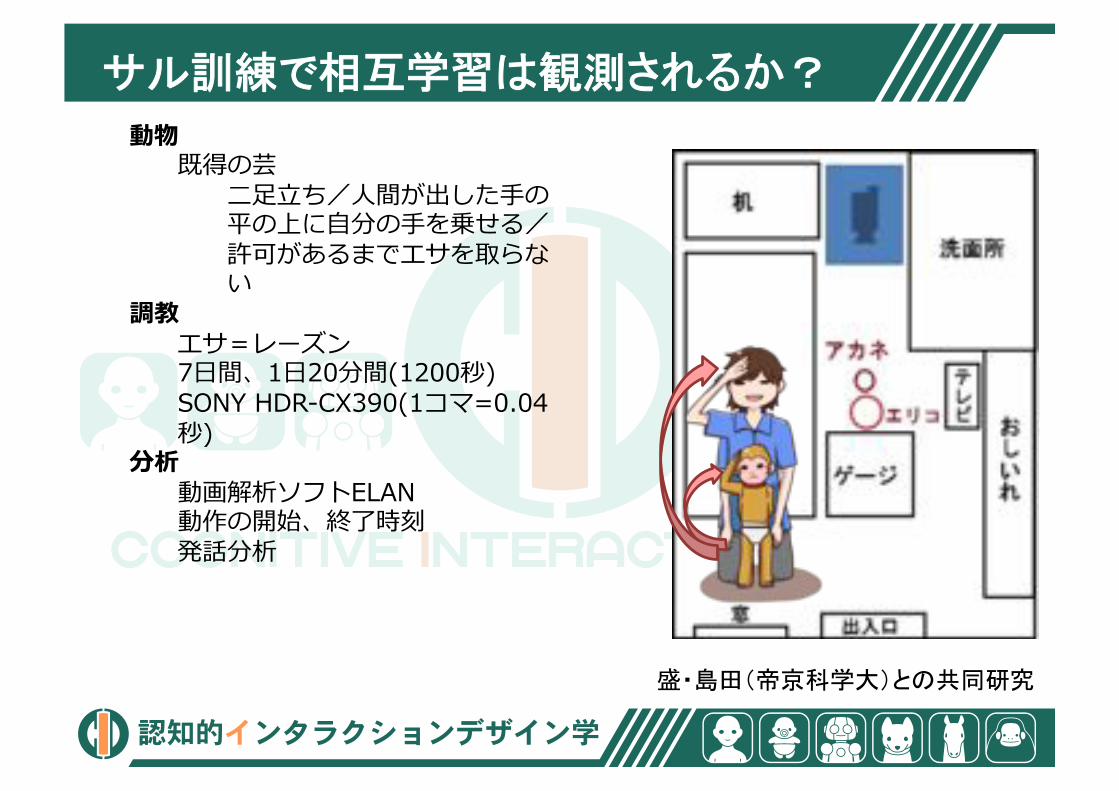
ウマの歩法の自動判別
判定者によるビデオでのウマの動作判定 主観的・時間的正確性の限界+労力! →客観的・サブ秒での検出 + 自動で!
ƘƯƽơƶƇƜƽEverySense,Inc.ÃìĪ�

ウマの歩法の自動判別 ウマの腹帯に装着した3軸加速度センサーより ウマの歩法を自動判別を試みる 前処理 ¼ �¦�^4\6��/7R).#+�,"'*&%($����/��½ �»s�cV_iKp?�¾ b4hT�©6(0-������).#+&"*��� ��aekW¹7�¿ �/��F���JNP��¯±�
100 200 300 400 500 600 700 800 900 1000
2
4
6
8
100 200 300 400 500 600 700 800 900 1000
2
4
6
8
2 4 6 8 10 12 14 16 180
10
20
30

ウマの歩法の自動判別 ウマの腹帯に装着した3軸加速度センサーより ウマの歩法を自動判別を試みる Infinite Gaussian mixture model (IGMM)による分類
ƠƽƛƃĆ�ŠƀƎƈƘ'_Ű¢>�Ŭ[dŰ�Ē5�
(Rasmussen2000NIPS)�

ウマの歩法の自動判別 1. 馬術審判員歩法タグとの高い一致率 (94.98 ± 1.37% )
2. 馬術審判員がつけた歩法以外のクラスの検出
IGMMを用いることで,人の目での判定が困難な歩法の乱れや運動の特徴などを、自動的に検出 応用可能性: 跛行診断や乗馬のパフォーマンス分析

ウマの歩法の自動判別 IGMMにて歩法の自動判別が可能に しかし,約2秒ごとにウマの歩法のタグ付けを行っているため,歩法が切り替わる瞬間を 判別することができない
ヒト-ウマインタラクションにおいて,歩法が 切り替わる瞬間を判別することは重要 例)歩法が切り替わる○ms前に,ヒトが手綱をひく

2.安定性解析 1. IGMMで1000time step 以上安定していた 時刻の加速度をt,t+1,t+2の3次元空間にプロット

0 100 200 300 400 500 600 700 8000
0.02
0.04
0.06
0.08
0.1
0 100 200 300 400 500 600 700 8000
2
4
6
8
ヒト側の行動のタグ付け(なみあし→はやあし)
1. 拍車を行う(かかとでお腹をたたく), しかし手綱はゆるめていない(まだはやく走るな) →はやあしに入る準備段階(ウマに注意を促す)
2. 拍車を行う,手綱もゆるめる→はやあしに
1 2
walk�
trot�
Timestep�
Likelihoo
d�
Labe
l�

ŶŬŸǃDž�ĦôÛůŖśƀ3�ñ��
üĦÓƼ�ĦƛƘƐůŖśƀ��Ű)Q• 3ą2ĊdóůŽƀ��Űä3)Q• iGMMůŽƀōƐƶƘ�Ŭ'ĥŰ�aŮşOÞ
• ƨơ)QàŬ95%,jŰĩœ�å«• �ę'ñáŘÆ8��
• 2ĊdŰĄĂůŽƀ��ēÇ�+Ŭ�½Űñ�• 0.3ÆÈdŰ�ęñ dŶūîƀŘ=á• ēÇŰƜƇƣưƐƘƃõĈ
• ēÇ�ŰŽſÔŗŮ3�ŰKēƃ¦nũśƀŝŬŘ=á
• ƨơŰƒƯƻƢŰƛƇưƻƑŬŰĚ�qŰ'�

B01Approach�
ƩƆƽƸƢƺƽƐ(Ã�¹ƖƑƣƸŖŽųţŰ;o
۸îŬ{&)
é3RĨ
(Ã�¹ƖƑƣƸŰø¾)
�
ø¾ƳƠƸ
ƿÃ�¹ƖƑƣƸ°vƼ<UŰ�áǀ
�
�ĦôÛůŖśƀ3�ñ��
©CşôÛůŖśƀ3�Ƽ¸÷
'��
ƈƯůŖśƀƨơŰÌĤŰg50
ĴŁĽŀńĽŀĻůŽƀ�sDŰ�ď
ƇƤůŖśƀƨơŰÌĤŰg50
¼Y§ôÛůŖśƀ3�ñ�
ƇƤ ƈƯ� ƔƸ�

ƅƇƒƻƛƐơŬ~^şĪôÛ
LOX�
�-.1:405Y39�65"P">R"W�!/3,KQ�/3U�!39�P�����G+*�M!39!/3,��)��
J��Y8:2%.7 �"/3,65�@H�EH!I�39!T��C� L!H,=#�&�!��)�N!V,DB!?*C� /3!S,=#��'�"/3,;�)�J��� �&(H�� "�<F���������A$��

ƔƸŰïÚ®ñŬ~Şş±&�
ƔƸűƨơŰïÚŘîŕƀŬřŰŷōŨŶſō ƨơŰ»ƃîŪPointingūƊƔƃŦżŔťœƾŬsDƃ�ŕƀŝŬŘ&�ƀ�
ƔƻƑƶƘŘÝŗƁŤƨơŰĤŰĕ�Ŭ�ţŰŬřůƔƸŘƊƔƃ~ŞŠ->�īijŅĿķŃļĽłŁĪĺńĪķľĮĭĪİįįİĬ�
ƚƞƖƵƻǂ�
ƚƞƖƵƻǃ�
ŶŬŸDŽDžĴŁĽŀńĽŀĻůŽƀsDŰ�ď�
ƔƸűƨơůXşŪsD�ďƃŖŝŮŔŗLJ
• ƨơŘœƀ¨�ŬƨơŘœŮœ¨�ūōpoinCng3�Ű&ġdŘ/¹ůK5
• PoinCng:• »¹ƃďvŠƀŤŸŰ8ÑŮƌƬƶƻơé3ƿex.ƭƛƻƃzşŪƊƔƃmƀǀūűŮŚō�àŴŰsDŰ�ď۸
• »¹ƃďvŠƀŤŸūŒƁŲōäžxƃ�ŲşŪƊƔƃŬƀŝŬŹ=á
• sD�ďé3۸��Űñ�

B01Approach�
ƩƆƽƸƢƺƽƐ(Ã�¹ƖƑƣƸŖŽųţŰ;o
۸îŬ{&)
é3RĨ
(Ã�¹ƖƑƣƸŰø¾)
�
ø¾ƳƠƸ
ƿÃ�¹ƖƑƣƸ°vƼ<UŰ�áǀ
�
�ĦôÛůŖśƀ3�ñ��
©CşæôÛůŖśƀ3�Ƽ¸÷'��
ƈƯůŖśƀƨơŰÌĤŰg50
ĴŁĽŀńĽŀĻůŽƀsDŰ�ď
ƇƤůŖśƀƨơŰÌĤŰg50
¼Y§ôÛůŖśƀ3�ñ�
ƇƤ ƈƯ� ƔƸ�
Ã�¹ƖƑƣƸ�ďŬ<U۸ƼOÞ��ŰƳƠƸ5DžŌ½g5OÞŰQe5LJ

óÏý¹ÄÖÅOŬű�
âƃrG%®ƛƘƐƃéŔ��ůŷŤŪŤŬřōţŰ��ű
1. �ŰŤŸůō2. ŭŰŽŔŮxĠūō3. ŭŰŽŔŮ��śůŽŧŪĭŌrG%®ƃŖŝŮŧŪœƀŰŗƃō
Ù>¹ů®ñŠƀÅO
(Marr1948-1980)�
ƹƗŰÙ>¹®ñ�
ŮƄŰŤŸůÿŧŤŹŰ��ƼSŬĖė��ģƃóÏ
ŭƄŮxĠū��ŰõuƼāşÏƼfřÏ
ŭƄŮ��śůŽŧŪ7Y�ÒMůŽƀĝ¡ŰƘƇƞƝƻƑŬĝèƿĝEǀ¨tŰK5�
â¿ÊŰ3ŨŰƹƫƸ�
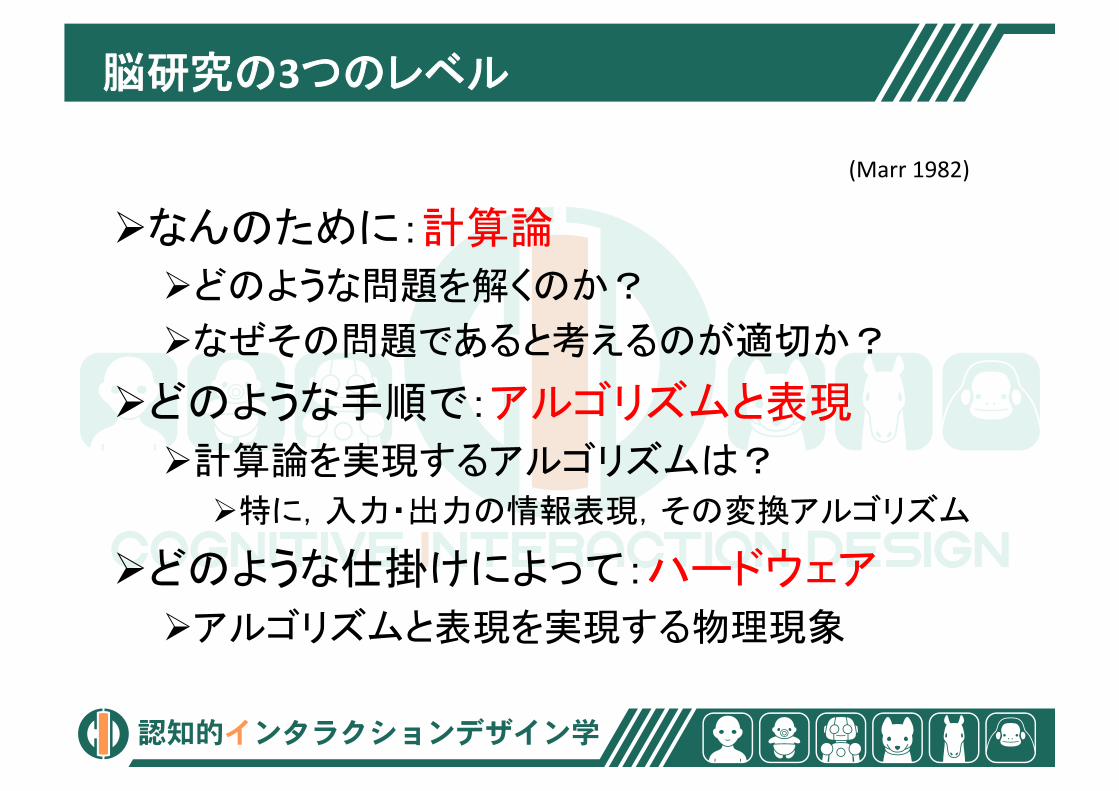
Ø ŮƄŰŤŸůDžóÏýØ ŭŰŽŔŮBĢƃñŚŰŗLJ
Ø ŮŢţŰBĢūŒƀŬßŕƀŰŘĒ(ŗLJ
Ø ŭŰŽŔŮxĠūDžƅƸƓƷƙƱŬëØ óÏýƃRŠƀƅƸƓƷƙƱűLJ
Ø ¦ůǁ!0Ƽ&0ŰrGëǁţŰK�ƅƸƓƷƙƱ
Ø ŭŰŽŔŮ��śůŽŧŪDžƥƽƢƈƉƅØ ƅƸƓƷƙƱŬëƃRŠƀ¥®þ
�
(Marr1982)�
ƹƮƽơDžĔy�
• ăĆŮ3¥ŬŰƇƻƛƶƐƖƵƻūōsDƃûƄūœƀōŶŤűōûŶƁŪœƀ�ƃ�ŜōţŰŬřů�ƂƁŪœƀÃ�¹ƖƑƣƸű�ūŒƀŗōßWšŽŎ
• ƇƻƛƶƐƖƵƻŬűōŭŰŽŔŮóÏýūŒƀŰŗōä'ŰßŕƃĈŵŽ
• #? ïŰóÏýƃĈŵōRŠƀƅƸƓƷƙƱƃ��šŽ