BAYESIAN HYPERSPECTRAL UNMIXING WITH MULTIVARIATE BETA ...ddranish/publications/thesis.pdf ·...
112
BAYESIAN HYPERSPECTRAL UNMIXING WITH MULTIVARIATE BETA DISTRIBUTIONS By DMITRI DRANISHNIKOV A DISSERTATION PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY UNIVERSITY OF FLORIDA 2014
Transcript of BAYESIAN HYPERSPECTRAL UNMIXING WITH MULTIVARIATE BETA ...ddranish/publications/thesis.pdf ·...

BAYESIAN HYPERSPECTRAL UNMIXING WITH MULTIVARIATE BETADISTRIBUTIONS
By
DMITRI DRANISHNIKOV
A DISSERTATION PRESENTED TO THE GRADUATE SCHOOLOF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OFDOCTOR OF PHILOSOPHY
UNIVERSITY OF FLORIDA
2014

c© 2014 Dmitri Dranishnikov
2

To my family, for encouraging me to pursue my dreams
3

ACKNOWLEDGMENTS
I would like to thank my advisor, Dr. Paul Gader, for all of his guidance and support
throughout my studies and research. I would also like to thank my committee members,
Dr. Sergei Shabanov, Dr. Anand Rangarajan, Dr. Yuli Rudyak, and Dr. Joseph Wilson,
for all of their help and valuable suggestions.
Thank you as well to my many former and current lab-mates and friends, for
providing valuable criticism of my work. I am particularly grateful to my friends Rin
Azrak, Marie Mendoza, and Diana Petrukhina for encouraging me to research and
to write. Words are not sufficient to express my thanks to Rin Azrak in particular, for
her boundless kindness and inspiration without which this work would not have been
possible.
Above all, thank you to my family, my parents Alex and Anna Dranishnikov, and my
brother Peter Dranishnikov for their love, support, and understanding.
4

TABLE OF CONTENTS
page
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
CHAPTER
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1 Linear Mixing Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2 Normal Compositional Model . . . . . . . . . . . . . . . . . . . . . . . . . 121.3 Statement of Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4 Overview of Research . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 LITERATURE REVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1 Geometric Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.1.1 Pure Pixel Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.1.2 Minimum Volume Based Methods . . . . . . . . . . . . . . . . . . . 20
2.2 Statistical Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.2.1 Two General Approaches . . . . . . . . . . . . . . . . . . . . . . . 232.2.2 Bayesian Source Separation . . . . . . . . . . . . . . . . . . . . . . 26
2.2.2.1 Dependent component analysis . . . . . . . . . . . . . . 262.2.2.2 Bayesian positive source separation . . . . . . . . . . . . 272.2.2.3 BSS : methods . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.3 Normal Compositional Model . . . . . . . . . . . . . . . . . . . . . 322.2.3.1 Maximum likelihood for NCM-based models . . . . . . . . 332.2.3.2 Bayesian NCM-based models . . . . . . . . . . . . . . . 342.2.3.3 Summary of NCM-based models . . . . . . . . . . . . . . 39
2.3 Evaluation Strategies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.3.1 Synthetic Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.3.2 Remotely Sensed Images . . . . . . . . . . . . . . . . . . . . . . . 42
2.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3 TECHNICAL APPROACH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1 Beta Compositional Model . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.1.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.1.2 Choice of Distribution . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.2 Review of Markov Chain Monte Carlo Methods . . . . . . . . . . . . . . . 483.2.1 Metropolis Hastings . . . . . . . . . . . . . . . . . . . . . . . . . . 503.2.2 Gibbs Sampling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5

3.2.3 Metropolis within Gibbs . . . . . . . . . . . . . . . . . . . . . . . . 523.3 Review of Copulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.3.2 Sklar’s Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.3.3 Gaussian Copula . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.3.4 Archimedian Copulas . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.4 BBCM : A Bayesian Unmixing of the Beta Compositional Model . . . . . . 563.4.1 Sum of Betas Approximation . . . . . . . . . . . . . . . . . . . . . 563.4.2 Bayesian Proportion Estimation . . . . . . . . . . . . . . . . . . . . 583.4.3 Bayesian Endmember Distribution Estimation . . . . . . . . . . . . 593.4.4 BBCM : A Gibbs Sampler for Full Bayesian Unmixing of the BCM . 63
3.5 BCBCM : Unmixing the Copula-based Beta Compositional Model . . . . . 643.5.1 Likelihood Approximation . . . . . . . . . . . . . . . . . . . . . . . 663.5.2 Covariance and Copula . . . . . . . . . . . . . . . . . . . . . . . . 673.5.3 Copula Calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.5.4 BCBCM : Metropolis Hastings . . . . . . . . . . . . . . . . . . . . . 71
3.6 A New Theorem on Copulas and Covariance . . . . . . . . . . . . . . . . 72
4 RESULTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.1 Synthetically Generated Data . . . . . . . . . . . . . . . . . . . . . . . . . 804.1.1 Unmixing Proportions . . . . . . . . . . . . . . . . . . . . . . . . . 814.1.2 Endmember Distribution Estimation . . . . . . . . . . . . . . . . . . 824.1.3 Full Unmixing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.2 Experiments with the Gulfport Dataset . . . . . . . . . . . . . . . . . . . . 834.2.1 Comparison with NCM . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.3 BCBCM Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854.3.1 Covariance Mapping . . . . . . . . . . . . . . . . . . . . . . . . . . 864.3.2 Synthetic Dataset . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.3.3 Mixture of True Distributions . . . . . . . . . . . . . . . . . . . . . . 884.3.4 Comparison with NCM, LMM, and BCM . . . . . . . . . . . . . . . 89
5 CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
BIOGRAPHICAL SKETCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
6

LIST OF TABLES
Table page
4-1 BBCM Synthetic Data : Proportion Estimation . . . . . . . . . . . . . . . . . . . 94
4-2 BBCM Synthetic Data : ED Estimation . . . . . . . . . . . . . . . . . . . . . . . 94
4-3 BBCM Synthetic Data : Full Estimation . . . . . . . . . . . . . . . . . . . . . . . 95
4-4 BCM, Mean Distance to Truth and Labelings . . . . . . . . . . . . . . . . . . . 95
4-5 CBCM Synthetic Data : Full Estimation . . . . . . . . . . . . . . . . . . . . . . 95
4-6 CBCM True Data : Full Estimation . . . . . . . . . . . . . . . . . . . . . . . . . 95
7

LIST OF FIGURES
Figure page
3-1 Histogram of labeled HSI Data . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3-2 The Independence Copula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
3-3 The Gaussian Copula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3-4 PDF of the Gaussian Copula . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4-1 Distribution of Asphalt - Gulfport Data . . . . . . . . . . . . . . . . . . . . . . . 91
4-2 Distribution of Dirt - Gulfport Data . . . . . . . . . . . . . . . . . . . . . . . . . 92
4-3 Distribution of Tree - Gulfport Data . . . . . . . . . . . . . . . . . . . . . . . . . 92
4-4 Spectra from Synthetic Dataset . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4-5 Spectra from Copula-Based Synthetic Dataset . . . . . . . . . . . . . . . . . . 93
4-6 Mapping from Covariance to Copula . . . . . . . . . . . . . . . . . . . . . . . . 94
4-7 KL Divergence of Gaussian and Beta Distributions from Hand-labeled distributionsin Gulfport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
4-8 Estimated and True Mean values with Synthetic Data . . . . . . . . . . . . . . 97
4-9 Estimated and True Sample Size values with Synthetic Data . . . . . . . . . . . 97
4-10 Gulfport Mississippi Subimage . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4-11 Gulfport Mississippi Subimage Class Partition . . . . . . . . . . . . . . . . . . . 98
4-12 BBCM : Estimated Means - Gulfport . . . . . . . . . . . . . . . . . . . . . . . . 99
4-13 BBCM : Estimated Proportions - Gulfport . . . . . . . . . . . . . . . . . . . . . 100
4-14 BBCM : Estimated Distributions - Gulfport . . . . . . . . . . . . . . . . . . . . . 101
4-15 BCM Estimate of the Tree Distribution . . . . . . . . . . . . . . . . . . . . . . . 102
4-16 NCM Estimate of the Tree Distribution . . . . . . . . . . . . . . . . . . . . . . . 102
4-17 Ground Truth for Tree Distribution . . . . . . . . . . . . . . . . . . . . . . . . . . 103
8

Abstract of Dissertation Presented to the Graduate Schoolof the University of Florida in Partial Fulfillment of theRequirements for the Degree of Doctor of Philosophy
BAYESIAN HYPERSPECTRAL UNMIXING WITH MULTIVARIATE BETADISTRIBUTIONS
By
Dmitri Dranishnikov
August 2014
Chair: Paul GaderMajor: Computer Engineering
Many existing geometrical and statistical methods for endmember detection and
spectral unmixing for Hyperspectral Image (HSI) data focus on the Linear Mixing Model
(LMM). However, the lack of ability to account for inherent variability of endmember
spectra has been acknowledged as a major shortcoming of conventional unmixing
approaches using the LMM.
Recently, several Bayesian approaches to unmixing the Normal Compositional
Model (NCM), a generalization of the LMM that models endmember variability,
have been proposed. However, these approaches also suffer from major issues,
including, but not limited to, the inability to model non-Gaussian effects present in
observed spectral-variability. Furthermore, due to the impracticality of estimating a
high-dimensional covariance matrix, almost all existing Bayesian unmixing methods
for the NCM assume band-wise spectral independence, even though the band-wise
dependence of hyperspectral data is a widely established observation.
Herein we investigate the use of a family of models based upon a distribution that
more accurately reflects the shape of the observed spectral variability of endmembers in
each band, the beta distribution. These Beta Compositional Models (BCM) are defined
and discussed, and various Bayesian unmixing approaches and algorithms for use with
these new models are derived, implemented and empirically validated using synthetic
and real hyperspectral datasets.
9

CHAPTER 1INTRODUCTION
A Hyperspectral Image (HSI) is a representation of electromagnetic energy
scattered within the field of view of a detector. What sets this type of image data apart
from normal image data is the sensitivity of this detector to hundreds, even thousands
of contiguous wavelengths, often referred to as bands, ranging from 0.4µm - 2.5µm
[1]. Typically, such data is remotely sensed from airborne or space-borne platforms,
and subsequently resolution is poor : on the order of 1 - 30 square meters per pixel [2].
Thus, pixels of interest are frequently a combination of spectral signatures from various
semi-homogeneous substances within the scene (e.g. Sand, Grass, Pavement). Such
substances, and their corresponding spectral signatures, are termed ”endmembers”,
and the general focus of much research in the past decade has been on recovering
and extracting these endmembers from HSI data [1, 2], along with the corresponding
proportional presence of an endmember within each pixel, referred to as ”abundance” or
”proportion”.
The recovery of abundances and endmembers from HSI data is widely known as
”Spectral Unmixing” [2]. Unmixing can be viewed as a special case of the generalized
inverse problem that estimates parameters describing an object using observations
of light reflected or emitted from said object [2]. However, in order for unmixing to be
performed a model must first be selected to relate the endmembers and abundances
to the HSI data itself. By far the most popular model [1, 2] is the Linear Mixing Model,
which describes each pixel as a weighted sum of endmembers with Gaussian noise
(See Eqn. 1–1). This model is fully described in the subsequent section. Non-linear
models have also been studied in recent literature [1], but these models can be
mathematically intractable and their effectiveness at extracting endmembers and
abundances is an open question [3] beyond the scope of this research.
10

1.1 Linear Mixing Model
The Linear Mixing Model (LMM) defines each pixel in an HSI (xi ) by the following
equation.
xi =
M∑k=1
pikek + εi i = 1, ...,N (1–1)
With the following constraints.
M∑k=1
pik = 1 (1–2)
pik ≥ 0 (1–3)
ekj ≥ 0 (1–4)
Here, N is the number of pixels in the image, M, is the number of endmembers, εi is
an error term, pik is the abundance fraction of endmember k in pixel i and ek is the k-th
endmember.
This equation can also be written in matrix form.
X = PE+ ε (1–5)
Where E = [e1, ..., eM], and P = [pik ] where i ∈ [1,N] and k ∈ [1,M]. Likewise
X = [x1, ..., xN ]T .
This model can be geometrically described as modeling each pixel as a convex
combination of endmembers. Decades of research [1, 2] have gone into adapting and
unmixing this model in various circumstances, and such research is examined broadly in
Chapter 2.
11

1.2 Normal Compositional Model
More recently however, another model has emerged from the HSI literature that
seeks to incorporate the inherent spectral variability of endmembers : the Normal
Compositional Model (NCM) [4]. To understand the concept of spectral endmember
variability consider, for example, that the spectra for an Oak Leaf was part of remotely
sensed scene. Oak Leaves are not all spectrally the same, even if they are part of the
same tree, and even the same oak leaf can look spectrally different under different
conditions such as orientation, position, or illumination. This variability is what is referred
to with the term ”spectral variability” or ”endmember variability” [5].
Indeed, the use of fixed endmember spectra, as in the LMM, implies that variation
in endmember spectral signatures, caused by variability in the condition of scene
components, is not accounted for. Thus because of the complexity inherent in many
landscapes the use of such fixed endmember spectra has been found to result in
significant proportion estimation errors [5]. The Normal Compositional Model (NCM)
seeks to liquidate this error by modeling spectral variability as a normal distribution
centered around each endmember. Indeed, the NCM represents each pixel in an HSI
(xi ) by the following equation.
xi =
M∑k=1
pik ek (1–6)
ek ∼ N(ek ,Vk) (1–7)
With nearly identical constraints to the LMM.
M∑k=1
pik = 1 (1–8)
pik ≥ 0 (1–9)
(1–10)
12

All relevant NCM research to the hyperspectral model is described and presented
in Chapter 2. As mentioned above, this model is relatively new, but the motivation
behind it is that fundamentally endmembers and endmember spectra are not points but
distributions representing spectral variability, and should be estimated as such [5, 6].
Indeed, the estimation of these endmember distributions is the primary focus of this
research, although not through the NCM.
1.3 Statement of Problem
Evidence through examination of hyperspectral data indicates that spectral
variability present in endmember distributions is not symmetric and non-Gaussian
despite the fact that state of the art models assume it is. Moreover, the domain
of endmembers is measured in reflectance, a quantity that should be physically
constrained to be within [0, 1] for realizable endmembers, but such a constraint is
not present in any existing distribution-based models. Finally, almost all existing work
in endmember distribution detection, particularly for the NCM, has assumed that
endmembers hold a single constant diagonal covariance for purposes of simplicity, but
from observed data this is simply untrue.
In summary, neither the Normal Compositional Model nor the Linear Mixing Model
accurately model spectral variability of endmembers.
1.4 Overview of Research
The conducted research involves the development and expansion of a new model,
the Beta Compositional Model (BCM), which reflects the asymmetry, finite support, and
robust variance present within Hyperspectral data.
xi =
M∑k=1
pik ek (1–11)
ek ∼ B(~αk , ~βk) (1–12)
13

Where B denotes a multi-variate beta distribution : a multivariate distribution whose
marginals are independent beta distributions. Like the normal compositional model,
each endmember is modeled as a random variable, except in this case the nature of the
marginal distributions of this random variable is that of beta distributions.
An algorithm, Bayesian BCM (BBCM), is derived and developed in this research to
fully unmix this model and estimate all parameters. No algorithm based on endmember
distribution models has been ever introduced into the hyperspectral literature that fully
estimates the means, variances, and proportions of the model within a Bayesian context,
making this algorithm the first of its kind.
This algorithm is based on Markov Chain Monte Carlo (MCMC) methods, and is a
highly parallelizeable three stage Gibbs sampler, where each individual step is in itself a
Metropolis-Hastings algorithm. The cornerstone of this approach is the evaluation of the
likelihood function with an approximation : a multivariate beta distribution approximating
a sum of multivariate beta distributions. BBCM is empirically validated on multiple
datasets and its performance is compared to different state of the art HSI models. The
BCM is found to outperform the NCM on both synthetic and real datasets.
Additionally, in this research we expand the Beta Compositional Model to reflect the
dependency of the data in different bands. We do so by tying the beta distributions
together with copula [7] to reflect the bandwise dependency within endmember
distributions. This new model, a Copula-based Beta Compositional Model (CBCM),
is formally described below.
xi =
M∑k=1
pik ek (1–13)
ek ∼ BC(~αk , ~βk) (1–14)
BCCDF (~α,~β) := Copula (BCDF (α1, β1),BCDF (α2, β2), ...,BCDF (αD , βD)) (1–15)
14

Where BCCDF is a multivariate cumulative distribution function which ties together the
univariate beta distributions (marginals) over each band through a copula.
A new algorithm, a Bayesian unmixing of CBCM (BCBCM) again based on
MCMC methods, is developed in this research. BCBCM extends the ideas and
mechanism behind the BBCM algorithm in order to unmix this copula-based model.
The approximation keystone of the BBCM no longer holds, however, but a different
approximation based upon the same principles is derived and verified. This new
approximation relies upon a novel theoretical result, developed and derived in this work,
relating covariance and copula. Based on this result, a general approach to modeling
sums of copula-based random variables is presented and used. The CBCM model is
then empirically validated against state of the art models on both real and synthetic
data, results are found to be significantly better than most methods, and comparable
with the NCM.
15

CHAPTER 2LITERATURE REVIEW
A key component of analyzing Hyperspectral Imagery revolves around being able
to invert the Linear Mixing Model (LMM), shown in Eqn. 1–1. This inversion problem
consists of finding the endmembers e and their corresponding abundance fractions pik ,
known as proportions. Inversion of the LMM, and indeed inversion of any hyperspectral
mixing model, is often referred to as ”Unmixing” or ”Spectral Unmixing” [2]. Unmixing
has been well studied over the past 20 years, in particular investigations in this field
have focused on developing viable mixing models and constructing robust, stable,
tractable, and accurate unmixing algorithms that use these models [1].
These algorithms can be broadly categorized into two main types : Geometric
Methods, that use the LMM model and exploit the fact that pixels must lie on a simplex
set formed by the endmembers, and Statistical/Bayesian approaches that focus on
distribution-based models, the utilization of priors to enforce model constraints, and
subsequently the estimation of posterior parameter probabilities [1].
Statistical, and in particular Bayesian, approaches have been found to be more
robust than their Geometric counterparts, and in general provide more accurate
estimates even when information is scarce [1, 8]. Furthermore such approaches
also provide a natural framework for representing variability, particularly in the estimation
of endmembers [1]. However, Bayesian approaches suffer due to the intractability of the
posterior distributions produced by existing models. This intractability necessitates the
use of sampling via Markov Chain Monte Carlo algorithms, which can be quite costly in
terms of time complexity [9].
This review will begin with a brief discussion of some representative and state
of the art Geometric Approaches to Unmixing the LMM followed by an extensive
overview of statistical inference based approaches with particular focus on the Normal
Compositional Model (NCM) [4, 10], and approaches that incorporate estimation of
16

endmember variability. Finally, empirical evaluation strategies for both categories of
approaches will be discussed.
2.1 Geometric Methods
Geometric approaches to the unmixing problem can be divided into two clear types.
The first type assumes the endmembers ek are present within the data, the second does
not. Both types implicitly make use of the Linear Mixing Model.
2.1.1 Pure Pixel Methods
Methods that make the assumption that endmembers ek, must appear within the
image as pixels are known as ”Pure Pixel” methods. In other words, the vertices of the
simplex defined by Eqn. 1–1 must be present as pixels within the image.
We introduce three, commonly used, representative algorithms that make use of
this assumption. A shared characteristic of these methods is that they do not estimate
the abundance fractions but focus only on estimation of the endmembers. As a result,
many of these methods can be used for initialization of more complicated approaches
[10, 11]. For all of these methods the number of endmembers M is assumed known.
PPI
The Pixel Purity Index [12, 13], or PPI, algorithm is historically the first algorithm
used for unmixing with this assumption. The algorithm calculates a pixel purity value for
each pixel, and ranks the pixels by their purity. The M purest pixels are then returned as
candidate endmembers.
The algorithm begins with a Maximum Noise Fraction [14] as a pre-processing
step to reduce dimensionality. Following this, random vectors known as skewers are
generated. The image data xi are then projected onto these skewers. The pixel purity
values are updated following each random projection by adding one to the values of
the pixels that fall near the extreme ends of every projection. This process is continued
iteratively a desired number of times, and the resulting M pixels with the highest pixel
purity values are returned [12].
17

N-FINDR
The N-Findr algorithm is a well-known, established, and widely used method of
endmember detection that searches for endmembers within an input hyperspectral
data set [15]. The goal of the N-Findr algorithm is to find endmembers by selecting M
pixels from the image in such a way that the volume of the simplex spanned by these M
endmember pixels is maximal [15]. Broadly speaking this algorithm can be described as
inflating a simplex [1].
The algorithm begins by initializing the endmembers to random pixels within the
image. Then each pixel in the image is iteratively selected as a candidate to replace
one of the endmembers. If replacing an endmember with this pixel increases the volume
of the simplex formed by the endmembers, the endmember is replaced. This process
continues until all pixels in the image have been tested as candidates. Under certain
assumptions about the data the resulting endmembers can be shown to be vertices of
the simplex with maximal volume [15].
A pitfall of this method is the image data must be dimensionality reduced to M − 1
dimensions beforehand, either via MNF [14], or Principal Component Analysis (PCA)
[16]. This is due to the volume calculation present in the algorithm : the calculation is
determinant based which requires the endmember matrix to be square.
VCA
The Vertex Component Analysis (VCA) is a widely-used, state of the art endmember
detection algorithm [17]. Broadly speaking, VCA can be described as a random
orthogonal-projection based algorithm.
VCA assumes that in the absence of noise, observed vectors lie in a convex cone
contained in a subspace of dimension M [17]. The VCA algorithm starts by identifying
this cone by SVD and then projects all data points onto a simplex of dimension M. Also,
a 1-dimensional subspace A consisting of a single line is initialized.
18

Then, VCA proceeds by iteratively projecting all of the pixels onto a (random)
vector orthogonal to the subspace which is spanned by A. The pixel with the most
extreme projection is then determined and added into the subspace A. This procedure
is repeated M times, and the pixels corresponding to the resulting M vectors in A are
returned as endmembers.
One advantage accounting for the wide use of VCA is its speed. Indeed, when the
number of endmembers is higher than 5 the VCA computational complexity is an order
of magnitude lower than PPI and N-FINDR algorithms [17]. It is worthwhile to note that
VCA is commonly used as an initialization step to other geometrical and some statistical
unmixing algorithms [3, 10]
Summary
A plethora of other pure pixel algorithms exist [1, 18–20] including some that are
a slight variation of the above three, but share the same basic algorithm structure
[21, 22]. These algorithms all share the same common pitfall : the inherent pure pixel
assumption. This assumption is not valid when no pixel is purely composed of one
material, which is the case for many hyperspectral datasets. Hence, these algorithms
are most commonly used in conjunction with more sophisticated unmixing methods,
typically as pre-processing or initialization steps.
19

2.1.2 Minimum Volume Based Methods
Methods exists that do not make the pure pixel assumption, but still make use of
the geometry of the problem inherent to the LMM. These methods operate by defining
and minimizing an objective function with respect to the endmembers E and proportions
P (See Eqn. 1–5) simultaneously. Typically, this objective consists of two terms, an
error term denoting the distance of the model from correct characterization of the
data, and a volume based term that seeks to minimize the volume of the simplex
formed by the endmembers. Two widely known methods are presented : Minimum
Volume Constrained Non-negative Matrix Factorization (MVC-NMF) [23], and Iterated
Constrained Endmembers (ICE) [11]. Both of these methods can also be categorized as
statistical inference based methods [1], due to the explicit presence of estimators.
MVC-NMF
Minimum volume constrained non-negative matrix factorization seeks to find
non-negative E ∈ RD×M and P ∈ RN×D , such that
X ' PE (2–1)
As in 1–5 [24]. The formulation of MVC-NMF seeks to minimize the following
objective function with respect to E and P
(E, P) = arg minE,P1
2||X− PE||2F + λV 2(E) (2–2)
Where ||A||F := tr(ATA) denotes the Frobenius norm, and V 2 denotes a measure
of volume of the simplex formed by the endmembers E [1, 23]. The regularization
parameter λ controls the trade-off between the volume and error term. Optimization
proceeds via gradient descent, alternatively optimizing for E and P, with clipping used to
ensure non-negativity [23].
20

A major disadvantage to this approach is that the sum-to-one constraint on the
proportions P, is not strictly enforced. Instead, the data and mixing matrices (X and
P) are augmented with a parameter that controls the importance of the constraint [23].
Another disadvantage is that the volume measure used V is a determinant-based
calculation, which necessitates an approximate volume calculation via projection to an
M dimensional subspace (via PCA) [23].
Nevertheless this algorithm is effective under certain conditions and has found wide
acceptance in the literature [1].
ICE
Iterated Constrained Endmembers (ICE) [11] is another well known, established
method that seeks to minimize the volume of the simplex formed by the endmembers.
The objective of ICE is similar to that of MVC-NMF:
(E, P) = arg minE,P1− µN||X− PE||2F +
µ
M(M − 1)V (E) (2–3)
Where µ is a regularization parameter and the volume measure V used, is instead
a sum of squared distances
V =
M∑i=1
M∑j=i+1
||ei − ej ||2 (2–4)
Use of this volume measure is not constrained by dimensionality reduction and
leads to an analytically tractable objective function. Indeed, this formulation leads to
closed form solutions for E if P is fixed, and a quadratic optimization problem for P if
E is fixed [11]. The algorithm is initialized by taking E as the output of the Pixel Purity
Index (PPI) method described earlier, and proceeds by alternatively optimizing P and E
through quadratic programming and a closed form solution respectively until the value of
the objective function has converged.
21

Compared to MVC-NMF this algorithm is generally faster, and not limited by
dimensionality in terms of volume calculation [1]. Many variations of this algorithm
exist, including Bayesian [25] and sparsity promoting versions [26] which estimate the
parameter M, the number of endmembers, in the same objective function.
The greatest disadvantage of this method specifically is the reliance on the
accuracy of the pre-determined parameter µ. In order for this algorithm to be effective µ
must be set appropriately, usually reflecting the level of noise within the data [11, 26].
Summary
MVC-NMF and ICE are two well known, commonly used minimum-volume
constraint unmixing algorithms, however there has been much development recently
on other well known variants in the literature [1, 27–29]. All of these approaches use
the LMM and seek to minimize the volume spanned by the endmembers E, typically by
minimizing some objective function. Nevertheless, these approaches do not provide any
measure of confidence or variability in the estimate, and tend to be highly sensitive to
initialization and parameter values, yielding solutions that may not be globally optimal or,
if parameters are set incorrectly, completely inaccurate.
2.2 Statistical Methods
When there are few or no pure pixels in a given hyperspectral dataset, geometrical
based methods often yield poor results [1]. Even for those approaches which do not
make the pure pixel assumption the solution is essentially dependent on the value
of a manually specified regularization parameter, and even then convergence to a
global minima is not guaranteed. Furthermore, no indication as to the variability of
endmembers, or the variability of estimated parameters can be inferred from these
methods.
In order to mitigate these issues many utilize a Bayesian framework [30], and
estimate distributions over parameters instead of point-estimates. To do so , they
express the physical constraints of the system as prior knowledge in the form of
22

prior distributions, these constraints include : Non-negativity of E and P, Sum to one
constraint on Pi , and physical constraints on the endmember spectra.1 . Minimal-volume
constraints on endmembers are often present as well [1, 25, 31].
2.2.1 Two General Approaches
Two general approaches for Bayesian spectral unmixing can be found in the
literature. The first utilizes the LMM, assumes a normal distribution for noise, and
models each pixel as a normal random variable with variance equal to the noise [32, 33].
xi ∼ N(M∑k=1
pikek ,σ2I) (2–5)
Appropriate priors that satisfy the physical constraints are then placed on this
model 2 , and approaches that utilize this method differ mainly in the choice of priors
[1], and methods within this approach fall under the categorization of Bayesian Source
Separation (BSS) [34].
The second approach models each endmember ei , as a normal random variable,
and subsequently models each pixel xi as a sum of random variables.
xi =
M∑k=1
pik ek (2–6)
ek ∼ N(ek ,Vk) (2–7)
The model used by this second approach is known as the Normal Compositional
Model (NCM)[4] and can be shown to generalize the LMM [4]. Note that the variance of
each endmember Vk is introduced as a new parameter in this model. Indeed, studies in
1 e.g. ekj ∈ [0, 1] if the data is in units of Reflectance
2 See Eqn. 1–3
23
this approach differ not only by selection of priors, but by functional form of Vk , [10, 35]
, and whether or not it should even be estimated [6, 31]. As with the first approach,
appropriate priors can then be placed on the model. Such approaches for model
estimation, using the aid of prior information and estimating posterior probabilities, are
widely referred to by the term ”Bayesian”. These methods and how they are applied to
HSI data within the literature, are explained in the following section.
Bayesian estimation
The estimation approach for both BSS and NCM is done via estimation of the
posterior distribution p(θ|X), where θ comprises all parameters to be estimated. To
illustrate with an example, if we were estimating the the parameters θ = [E, P] 3 the
posterior density of these quantities can then be expressed as proportional to the
product of the likelihood and the priors, via Bayes Theorem [8, 30].
p(E,P|X) ∝ p(X|E,P)p(E)p(P) (2–8)
Where p(X|E,P) is the likelihood, and p(E), p(P) are prior distributions that
summarize our knowledge of what these parameters should be. In the case of spectral
unmixing, these priors typically implicitly entail positivity and sum-to-one constraints,
and can be used to specify regularization as well [1]. Estimation of parameters in
both models can then be accomplished via maximizing the posterior distribution of the
parameters (e.g p(E,P|X)) with respect to the data. However, this maximization problem
is often intractable, so the majority of approaches focus on estimating the full posterior
distribution via sampling and Markov Chain Monte Carlo (MCMC) methods.
3 assumed independent
24

MCMC
As stated in the previous section, maximization of the resulting posterior distribution
directly is intractable in almost all studied cases. Therefore, all of the methods in
this section rely on Monte Carlo Markov Chain (MCMC) [36, 37] techniques. MCMC
techniques in general are a well studied class of algorithms for sampling from probability
distributions based on constructing a Markov chain that has the desired distribution as
its equilibrium distribution. For this particular problem, MCMC techniques can be used
to sample from an otherwise intractable posterior distribution (e.g. p(E,P|X)). After an
adequate number of samples are taken, Maximum A Posteriori (MAP) [8] estimates of
desired parameters, in this case endmembers and abundances, can then be calculated
simply by observing the histogram.
The most prevalent MCMC method for full Bayesian unmixing of hyperspectral
data is Metropolis-Hastings [38]. Indeed a specific case of Metropolis-Hastings, Gibbs
Sampling [39], is most often used. This technique relies on iteratively sampling the
conditional posterior distribution of each parameter given all the others [36, 39]. An even
more advanced technique that performs a Metropolis step within each Gibbs Sample
also appears often [40] and is known as Metropolis-within-Gibbs. A more technical and
detailed review of MCMC can be found in the following chapter.
Non bayesian methods
The BSS and Bayesian NCM approaches both also have frequentist counterparts
[4, 41]. These correspond to a simpler, Maximum Likelihood (ML), estimation without the
use of priors. Direct estimation of the parameters is still intractable however, but in both
studies an Expectation Maximization (EM) algorithm is derived and implemented [4, 41].
It is interesting to note that despite the existence of EM algorithms for unmixing, there
have been no studies in the literature of any methods based on Variational Bayes (VB)4
4 also known as Variational Inference
25

[8], an approach analogous to EM that can be used to estimate a posterior distributions
with respect to all estimated parameters in a fully Bayesian fashion.
2.2.2 Bayesian Source Separation
Since the number of endmembers and their spectra are not known, spectral
unmixing using the LMM falls into the class of blind source separation problems [1].
Independent Component Analysis (ICA) [42], is a well known tool used to solve such
problems under the assumption that the ”sources”, in this case the abundance fractions,
are mutually independent. However, this assumption has been shown to be false for
hyperspectral data, so ICA can not be used effectively [1, 43]. However, Nascimento et
al. [41, 44] have recently proposed a new method to blindly unmix hyperspectral data :
Dependent Component Analysis (DECA).
2.2.2.1 Dependent component analysis
The Dependent Component Analysis model is based upon a universal projection of
the data and endmember signatures onto an M dimensional subspace, identified as the
signal subspace using HySime [44, 45].
Briefly, HySime is a method developed by Bioucas-Dias et al. that attempts to
discern the signal subspace in any dataset in a completely unsupervised manner. It
does this through a similar fashion to Principal Component Analysis (PCA) [16], through
an eigen-decomposition of the data covariance (shifted to account for noise) where
a specific set of eigenvectors are selected in such a way that they minimize a mean
squared error metric on the projected data[45].
Let the projection matrix for this subspace determined by HySime be denoted by
H. Then, under this projection, the desired endmember matrix to estimate A = HE, is
M ×M.
DECA then models the abundance fraction density for each pixel as an mixture of
Dirichlet densities:
26

p(p|θ) =K∑q=1
εqDir(p|θq) (2–9)
Where θ = {θ1, ..., θK , ε1, ..., εK} denotes the complete set of parameters to specify
the mixture, and ε1, ..., εK are the mixing probabilities. Then, with the assumption that
observed spectral vectors are independent [1], the likelihood of the data given the
projected endmembers A can be written as
p(X|A) =
(N∏i=1
pα(A−1xi)
)|det(A−1)|N (2–10)
Where pα is the mixture of Dirichlet distributions mentioned above. It is worthwhile
to note that in ICA, this likelihood is greatly simplified by the source independence
assumption, which enables pα =∏pαk , but this assumption does not hold here, hence
the use of a Dirichlet mixture [1, 44]. After this likelihood is established, a generalized
expectation maximization (GEM) algorithm is derived to maximize this likelihood, and
update formulas are derived for the parameters to the Dirichlet Mixture. An update rule
for A, however, is done via gradient descent [41].
Newer versions of this algorithm outperform or match state of the art geometric
approaches [44] on both synthetic and real data. However, this approach suffers from
the same drawbacks as present in many Expectation Maximization approaches [46] :
the lack of a full distribution estimate and thus the lack of an estimate of uncertainty, and
the issues of convergence of EM to a local maximum.
2.2.2.2 Bayesian positive source separation
Much work has been done in the study of Bayesian Source Separation [34, 47, 48],
but considerably less work has focused on Bayesian Positive Source Separation [33],
and even less have focused on fully constrained Bayesian Positive Source Separation
approaches [32], that take into account the full constraints of the linear mixing model.
27

In this section we briefly go over the fully constrained Bayesian Positive Source
Separation approach (BSS) for unmixing the LMM. Then we proceed to characterize
all Bayesian Positive Source Separation methods found in the literature by their prior
distributions, particularly their distributions for E and P. All of these methods use Gibbs
sampling for posterior estimation, including the use of Metropolis-within-Gibbs.
Recall that the LMM model represents each pixel as a normal distribution with noise
variance given by σ2i : [32, 33]
xi ∼ N(M∑k=1
pikek ,σ2i I) (2–11)
The resulting likelihood for each pixel can be written as
p(X|E,P,σ) ∝ 1∏Ni=1 σ
Li
exp
(−
N∑i=1
||xi − ETpi ||222σ2i
)(2–12)
Most methods that were found in the literature shared this likelihood, with some
small exception: In some cases a simplifying assumption σ2i = σ2 ∀i was taken [49].
2.2.2.3 BSS : methods
Almost all approaches described in the literature estimate hyperparameters for
the prior distributions of E, P, or σ, as opposed to setting them manually, resulting in a
hierarchical Bayesian approach [36].
The methods proposed by Moussaoui et al. [33, 50, 51] are characterized by the
use of Gamma priors on both the endmembers and abundances.
p(E|a,b) =D∏t=1
N∏j=1
Γ(ejt ; aj , bj) (2–13)
p(P|c,d) =M∏t=1
N∏j=1
Γ(pjt ; cj , dj) (2–14)
28

Oddly enough, in the methods proposed, the sum-to-one constraint on the
abundance fractions is not enforced (hence the gamma prior), though the focus is
predominantly on accurate estimation of endmembers. Since this is a hierarchical
model, hyperparameters corresponding to each Gamma prior are estimated with
Gamma hyper-priors (for b and c) and Exponential hyper-priors (for a and c), and the
noise variance σ2i is described by an inverse-gamma prior. This method, first proposed
within [50], extensively uses Metropolis-Hastings within Gibbs to sample from the
resulting posterior.
The methods proposed by Dobigeon et al. [32, 49, 52, 53] are significantly different,
but build on the work of Moussaoui et al. In [32], Gamma priors are used for the
endmembers ek , as in [50] but Dirichlet priors are used for the proportions.
p(P|δ) =N∏i=1
Dir(Pi ; δ) (2–15)
(2–16)
The parameters for the Dirichlet prior are fixed δi = 1 ∀i so that the distribution of
potential proportion values is equiprobable over the subset/simplex of the unit hypercube
that sums to one [32]. Some argue that this choice favors estimated endmembers
that span a simplex of minimum volume [1]. Thus, all of the constraints of the LMM
are enforced, and the noise variance, as in [50] is modeled with an inverse gamma,
and hyperparameters for ek are modeled with exponential and gamma hyper-priors
respectively. Additionally, a Jeffrey’s hyperprior is placed over the first of the noise
hyper-parameters. This method also uses Metropolis-Hastings within Gibbs, but with
MH steps only present in the generation of the conditional distributions on E and P. An
identical method was also presented in [53], without the added estimation of E.
The method presented by Dobigeon et al. in [49] uses a different endmember
prior. In this study, a dimensionality reduction step is necessitated and because the
29

constraints of the LMM must be satisfied in the original space, not the dimensionally
reduced space, the prior distributions are unusual. Assume the projection matrix
for dimensionality reduction is given by H. Then, for the projected endmembers
E0 := HE, the prior (Eqn. 2–18) is a truncated multivariate Gaussian distribution
where the truncation is taken over the set such that the distribution is zero in areas
where the inverse projection of the endmembers, (HTH)−1HTE0, is negative. The set
corresponding to the non-zero part of the distribution is defined as TH below.
p(E0|s) =M∏m=1
NTH(e0m; s
2mID) (2–17)
TH :={h | (HTH)−1HTh >= 0
}(2–18)
An assumption to simplify the noise model σi = σ ∀i is also used in this method.
Additionally, the parameters of the endmember prior s are fixed manually, typically to
large values [49].
Finally, yet another method by Dobigeon et al. in [52] replaces the endmember prior
with one that is a uniform discrete prior over an endmember library, with an additional
prior on the number of endmembers M. A hybrid Metropolis-within-Gibbs algorithm is
then used that not only unmixes the endmembers and abundances, but estimates the
number of endmembers as well [52]. This approach, referred to as a Reversible Jump
MCMC Algorithm [54], estimates all the parameters using Gibbs sampling as before,
with the addition that the estimation step for the endmembers E involves a potential
Reversible Jump. Specifically, with some probability the endmember Gibbs update will
undergo a Birth, Death, or Switch move. Naturally Birth and Death moves increment and
decrement R, respectively 5 , and a switch moves randomly switches an endmember ek
5 Additionally in a Birth move, a new endmember will be selected from the library
30

with a spectrum in the endmember library [54]. This method is novel in the scope of its
estimation, but is unfortunately limited by the need for an accurate library corresponding
to the data in question.
One last method that falls under this approach was proposed by Arngren et al. in
[25]. This method seeks to recast MVC-NMF in a Bayesian framework through the use
of a prior that incorporates the minimum volume constraint. Priors over the noise σi = σ
and proportions P are taken as in many of the the previous method [49], an inverse
gamma and a uniform distribution over a simplex, respectively. The endmember prior,
however, is given by the following expression
p(E|Θ) ∝ exp(−γdet(ETE)) if emk >= 0 (2–19)
∝ 0 otherwise (2–20)
Estimation is done through standard Gibbs sampling. A disadvantage with this
approach is, as the author mentions, a fatal sensitivity to linear dependencies among
the estimated endmembers leading to a collapsing volume [25], which can occur if an
excess member fails to model the simplex, or for strong regularization parameters.
Moreover, this approach is not hierarchical, and so several potentially sensitive
parameters must be manually set [25].
Summary of BSS methods
The methods presented in the preceding section are all various Bayesian approaches
to unmixing the LMM. Almost all of these approaches are new (developed within the last
5 years), but many, particularly those utilizing Metropolis-within-Gibbs are quite slow due
to the increased complexity required when performing an inner Metropolis step within
an already complex Gibbs sampling procedure. Additionally, none of these models
accurately constrain the endmembers in the domain of reflectance 0 ≤ eik ≤ 1, and
these models do not inherently give an estimate of endmember variability. The variability
31

of the estimators, on the other hand, can be calculated due to the estimation of the full
posterior distribution.
2.2.3 Normal Compositional Model
Recall that the Normal Compositional Model, first introduced into the hyperspectral
literature by Stein et al. in [4], represents each pixel as a sum of normal random
variables.
xi =
M∑k=1
pik ek (2–21)
ek ∼ N(ek ,Vk) (2–22)
Specifically, each pixel is a weighted sum of endmember random variables, which
we denote as ek . Note that there is no additive noise in Eqn. 2–22, since the random
nature of the endmembers suffices to represent the uncertainty of the model [10]. The
sum of normal independent random variables is also a random variable, so this can be
rewritten [10, 31]:
xi ∼ N(M∑k=1
pikek ,
M∑k=1
p2ikVk) (2–23)
Which in principle, differs from the LMM-based BSS models only by the complexity
of the variance : Here we have a separate variance Vk for each individual endmember,
as well as the additional p2ik term, whereas in BSS based models this variance is
typically a diagonal covariance σ2i I that may vary per pixel.
The likelihood for this model can be written as [31]:
p(X|E,P,V) ∝ exp
(−
N∑i=1
(xi − ETpi)Tc(pi ,V)−1(xi − ETpi)
)(2–24)
32

c(Pi ,V) :=
M∑k=1
p2ikVk (2–25)
And, as is the case with BSS, unmixing approaches using the NCM are characterized
by choice of prior distribution for ek and P. These methods differ upon whether the
variance Vk is estimated at all, and often a simplification Vk = σ2I ∀k is introduced into
the model [10, 31, 35, 55].
2.2.3.1 Maximum likelihood for NCM-based models
An expectation maximization algorithm for unmixing spectral data is presented by
Stein et al in [4], and originally derived in [56], wherein the NCM is first applied to the
hyperspectral problem. The algorithm is described as a nested stochastic expectation
maximization (SEM) algorithm [46], and the hidden parameters of the model are taken to
be the proportions P [4].
First, all relevant parameters are initialized. Next, the proportions are updated by
maximizing the likelihood, subject to relevant constraints (Eqn. 1–3).
pi = arg maxpi N(xi ;M∑m=1
pikem,
M∑m=1
p2imVk) (2–26)
Where the normal distribution is identical to the one shown in Eqn. 2–23, and the
full form of the corresponding likelihood is shown in Eqn. 2–24.
Second, a nested Expectation Maximization algorithm is run, with hidden parameters
given by ek and desired parameters for estimation are Vk , and ek . The update equations
have the following form [4, 56]:
33

el+1k =1
N
N∑i=1
E [ek | xi ,P,Vl ,El ]
Vl+1k =1
N
N∑i=1
cov[ek | xi ,Vl ,El ]
+(E [ek | xi ,Vl ,El ]− ek)(E [ek | xi ,Vl ,El ]− ek)T
In this step, the inner EM algorithm iterates until convergence of these two
parameters. Finally, the first and second steps are repeated sequentially until some
convergence criterion is reached [4].
Unfortunately this method suffers from the same problems inherent to all EM
methods that estimate Maximum Likelihood, it is a point estimate and provide no
information about the variance of the estimate, even though the variability of each
endmember is indeed calculated. Also, Eches et al [10] specifically mention that many
SEM methods, including the one presented herein, can have ”serious shortcomings
including convergence to a local maximum” [10, 46].
2.2.3.2 Bayesian NCM-based models
Many of the pitfalls of the Maximum Likelihood estimation presented in the previous
section can be avoided by switching to a Bayesian framework [10]. There are several
different models that seek to apply Bayesian inference to the NCM, and all identified
Bayesian NCM-Based Models present within the literature are new, no more than 4
years old. As mentioned previously, many of these methods can be characterized
by their different choice of priors on the endmembers E and assumptions about
the endmember variance Vk . With one exception, all of these methods use MCMC
Metropolis-within-Gibbs sampling for posterior parameter estimation.
BSS inspired models
The oldest Bayesian NCM-based models for spectral unmixing comprise a set of
work by Eches,Dobigeon et al. [10, 35, 55], and can be characterized by differences in
34

assumptions on the functional form of Vk , as well as differing priors for ek which parallel
the work done by Dobigeon et al. in the BSS approach to unmixing the LMM [32, 52].
In [35] Eches et al. make the assumption Vk = σ2I, and define an inverse gamma
distribution as a prior for σ2.
σ2|δ ∼ IG(ν, δ)
With ν = 1 fixed, and a non-informative Jeffrey’s prior placed on δ [35]. Likewise,
for the proportions, a uniform prior on a simplex is used, this can be represented with a
Dirichlet distribution:
P|d ∼N∏i=1
Dir(pi ;d)
These priors are identical to the ones posited by Dobigeon et al. in [32] for the
LMM. Endmember means are not estimated in this algorithm, but are instead assumed
to be a-priori known, or pre-computed with VCA [17] or similar endmember extraction
algorithm. Posterior estimates are then computed using Metropolis-within-Gibbs.
Results on synthetic data are also compared and found to outperform a similar Bayesian
LMM-based method developed in [53].
In [10] the approach is similar, but a modification is introduced in order to incorporate
different endmember variances : Vk := σ2k I. This does not change the diagonal nature
of the endmember covariance, but does allow endmembers to have different levels of
variance. This necessitates only a slight change in the prior distribution for the variance:
σ2k |δ ∼ IG(ν, δ)
35

With ν = 1 fixed as before and a Jeffery’s prior on δ. This method is found to
outperform the method in [35].
Finally, in [55] a similar approach is used. As in [35], the equi-variance assumption
Vk := σ2I is taken, and the priors on the proportions and σ are as before. However,
in an approach that parallels that of Dobigeon et al. for the LMM [52] a prior is placed
upon the endmembers such that each endmember is selected, with a discrete uniform
probability, from a spectral library S . Additionally, a discrete uniform distribution is placed
upon the parameter M, the number of endmembers.
P(M = m) =1
Mmax
Where Mmax is specified as the maximal number of endmembers. Then, a MCMC
Reversible Jump method [54] is used. This method is nearly identical to the one used by
[52] described in the preceding sections. Essentially the same MCMC Jump framework
presented for the LMM is applied onto the Normal Compositional Model. Sampling
proceeds via a hybrid Metropolis-within-Gibbs framework. The fundamental drawback
of the methods presented so far is the inability to simultaneously estimate endmember
means, as they must be either a-priori known, unmixed with a separate algorithm, or
provided through a spectral library. Though, the latter choice does provide an estimation
framework, this estimation is fundamentally dependent upon the adequate choice of
library.
PCE approaches
A significantly different approach based on a piecewise convex model is undertaken
by Zare et al. [6, 31]. The motivation for this approach lies in the idea that hyperspectral
data is not convex but instead a union of convex sets. Thus, using traditional algorithms
based on the NCM or LMM will not easily recover potential endmembers buried within
the data, which are still vertices of some convex subset [6]. Indeed, evidence in the
36

literature suggests that approaches based on PCE are more effective at recovering such
endmembers [6].
This piecewise convexity can be viewed as an inherent clustering step, where every
cluster is modeled by LMM, or in this case the NCM. But the theoretical underpinnings of
Bayesian piecewise unmixing methods lie in the Dirichlet Process [57, 58], a stochastic
process, samples from which are distributions. In brief, a Dirichlet Process can be
viewed as a distribution over the parameters of any given base distribution.
In [6, 31], the piecewise assumption changes the nature of the model that describes
each pixel:
xi = ∼M∑m=1
pim,zi em,zi
ek,zi ∼ N(ek,zi ,Vk,zi )
Where zi is the index of the cluster point i has been assigned to, and both the
endmembers and proportions are different in each cluster. This formulation forces the
per-cluster likelihood into the following form:
p(xi |zi = c,E,P,V) ∝ exp(−(xi − EcTpi ,c)Tv(pi ,c ,Vc)−1(xi ,c − EcTpi ,c)
)v(pi ,c ,Vc) :=
M∑m=1
p2im,cVm,c
The full likelihood can then be given by
C∏c=1
∏i∈Ic
p(xi |zi = c,E,P,V) (2–27)
Where Ic := {i ∈ {1 ...N} | zi = c}, and C is the total number of clusters. Essentially
this amounts to taking a product of the original likelihood shown in Eqn. 2–24 over each
cluster.
37

In [6], for each cluster, a Gaussian prior is placed on the endmember means
ek,c ∼ N(µc ,Ce)
Where Ce is fixed, and µc has a normal hyper-prior given by
µc ∼ N(1
N
N∑i=1
xi ,Cµ)
Where Cµ := σµI is fixed to a large value [6]. The proportions are, as with
the methods of Eches and Dobigeon, given a fixed uniform Dirichlet prior over the
M-dimensional unit simplex. It should be noted that endmember variances V are not
estimated in this algorithm, they are fixed. Posterior estimation proceeds via sampling
with Metropolis-within-Gibbs, with an additional step where the cluster labels for the
pixels are sampled from a Dirichlet process [6]. One of the advantages of the NCM
framework is the inherent presence of endmember variability as a determinable
parameter of the model, a clear disadvantage of this piecewise approach is that it
does not fully take advantage of this facet of the NCM, the endmember variability is
fixed.
In [31], the prior on the endmember means is changed to a regularization prior
corresponding to the sum of squared distances between the endmembers, and
a polynomial prior is used on the proportions. Subsequently, a closed form MAP
solution for E is obtained. and the proportions are iteratively solved by casting them as
a constrained nonlinear optimization problem [31]. This approach, without the piecewise
convexity, has been termed Endmember Distribution (ED) Detection.
However, [31] continues by simultaneously estimating all relevant cluster information
via Gibbs sampling. Indeed this Gibbs sampling approach is used to estimate the cluster
labels for each pixel as in [6], and is combined with the ED detection algorithm in order
to fit piecewise endmember distributions to hyperspectral data. Similarly to [6], the
38

endmember variances Vk are fixed, or assumed known. Another drawback to both
of these models is the increased model complexity caused by the increase in model
parameters : due to the presence of C clusters, the number of these parameters has
increased by a factor of C from the original model.
Other approaches
Several other approaches tangentially related to a formulation of NCM appear in
the literature. In [59], an elliptically contoured distribution model, a generalization of the
multivariate normal distribution, is proposed for modeling endmembers in hyperspectral
data, and some theoretical results are proven, but no estimation algorithm is derived.
Eismann [60] references a discrete version of the NCM known as the Discrete
stochastic mixture model. In this model, the abundance fractions are constrained by
quantizing them to a discrete set of mixing levels. By performing this quantization the
estimation problem can be turned into a quadratic clustering problem [60]. The model of
each pixel is given as follows:
xi |q =M∑m=1
am(q)em (2–28)
Where for each q ∈ {1, 2, ...,Q} the abundance fractions am(q) are all fixed
to some value. Of course these abundances must still satisfy the constraints of the
LMM (Eqn. 1–3). A stochastic EM (SEM) based algorithm is then derived to estimate
the endmember means ek , variances Vk , and abundance vectors am(q) [60]. Some
qualitative, but no quantitative results are discussed.
2.2.3.3 Summary of NCM-based models
There are many different flavors of models for unmixing hyperspectral images
based upon the Normal Compositional Model. Several Expectation Maximization
based approaches [4, 31, 60] based upon either Maximum Likelihood or Maximum
A Posteriori estimates are present within the literature. Likewise, several Bayesian
39

methods [6, 10, 35, 55] based upon MCMC calculations of full posterior distributions are
also utilized. These are in turn based on other analogous BSS approaches [32, 49, 52]
that unmix the Linear Mixing Model.
Concerning endmember variance estimates, out of all the NCM-based methods,
only one MCMC method was found in the literature to simultaneously estimate
endmember variance and endmember means [55], and this method was dependent
upon the existence of a spectral library. On the other hand, most of the described EM
methods [4, 60] successfully estimate endmember mean and variance parameters,
though these estimates may not be globally optimal [46].
Also, MCMC estimates of variance tend to be limited, and constrained into diagonal
covariance [35], but this may not be a valid constraint : Each endmember is not
band-wise independent, that is the reflectance value of each endmember in a certain
band is quite similar for neighboring bands [61] , implying that the estimated endmember
covariance should be highly non-diagonal.
2.3 Evaluation Strategies
Geometric and statistical methods for unmixing hyperspectral images present in
the literature are evaluated empirically to determine their efficacy. However, evaluation
is difficult, particularly for many real data collections, due to the absence of what
is typically referred to as ”ground truth” : the true endmembers and corresponding
abundance values in the scene.
For this reason, two categories of approach exist : Evaluation based on synthetically
generated data with known ground truth and evaluation based upon remotely sensed
data (typically from airborne data collections), where ground truth is not known or may
be inaccurate. Within the literature, both approaches are used extensively.
2.3.1 Synthetic Data
The synthetic approach to evaluation involves the selection of spectra, typically from
a well known spectral library. USGS [62] is one such commonly used library [17, 23, 41].
40

Other approaches [10, 52, 55, 59] use libraries provided with the commonly used ENVI
software [63], and still others generate synthetic spectra analytically [32, 33]. Each data
point is then constructed by mixing these selected spectra with a given mixing model,
taking into account endmember variances or model noise depending on the model being
used.
A common disadvantage of this approach lies in the general problem of model
mismatch. Comparing two different models on generated data will create a clear
performance bias toward the model which the data was generated from. For example,
the LMM, and consequently many geometric unmixing algorithms that rely on the LMM,
will perform significantly worse on data that is generated from a non-linear model [3].
On the other hand, one of the main advantages of this approach lies in the
ready availability of ground truth : the true abundances, endmember spectra, and (if
applicable) endmember variances are known, allowing for ready comparison between
estimated and true parameters with commonly used error metrics. Indeed, some
representative metrics that fall into this category include those based on root mean
square error (RMSE), typically used for proportion evaluation, and spectral angle (SA),
typically used for endmember comparison [17]. A measure of dataset reconstruction
error is also prevalently used.
RMSE =
√∑Ni=1
∑Mm=1 pi ,m − pi ,mNM
(2–29)
SA = arccos(em ˙em||em||||em||
) (2–30)
Concerning experIn several such methods, various experiments are run to evaluate
the performance of the algorithm in question under varying levels of noise [10, 17, 23],
lack of pure pixels [23, 41], and initializations [23]. Many of these approaches are
geometric, since extensive testing is not possible for approaches that utilize a more
41

time-intensive approach, namely sampling, typically used by Bayesian methods.
Indeed, bayesian approaches using synthetic data, in particular those that utilize
MCMC, instead monitor metrics to determine the optimal number of MCMC iterations
[32, 33], and monitoring computation time [32]. Finally, comparison to other well known
Geometric or Statistical methods on synthetic datasets is common throughout the
literature [17, 32, 41].
2.3.2 Remotely Sensed Images
Whereas analysis of synthetic hyperspectral images is strictly quantitative in nature,
analysis of various approaches on real hyperspectral images is considerably less so.
This is simply due to the inaccuracy of ground truth : true proportions and endmember
spectra can be inaccurate or unknown in remotely (e.g. airborne) sensed data even if a
separate, corresponding collection was taken from the ground.
One representative used pervasively throughout the literature to evaluate both
Geometrical and Statistical unmixing approaches is a dataset captured by the Airborne
Visible/Infrared Imaging Spectrometer (AVIRIS) over Cuprite, Nevada [4, 17, 23, 31,
41]. The AVIRIS sensor is a 224-channel imaging spectrometer with approximately
10-nm spectral resolution covering wavelengths ranging from 0.4 to 2.5 µm. The
spatial resolution is 20 m [23]. This site has been extensively used for remote-sensing
experiments since the 1980s, and hence this dataset is unique in the ready availability of
high-accuracy ground truth [23, 64].
Extensive Lab-measured spectra for the minerals present in this dataset are
available [17, 23], and thus the accuracy of extracted endmembers can be evaluated
based on spectral angle (Eqn. 2–30) [17, 23] or euclidean error [31]. Proportion
estimation on this dataset, however, is mostly qualitative [23], although approaches
exist that seek to quantify such estimates through target detection and/or classification
[4]. Methods in the literature that use this dataset, however, tend to run on a specific
subset of the data, due to the intractable size of the full dataset [23, 31, 41].
42

Another dataset, popular for use with Bayesian and NCM methods [10, 35, 49, 55],
acquired in 1997 by the AVARIS over Moffett Field, CA [65] is also used. However, the
lack of ground truth for this dataset has given rise to a more qualitative validation based
on previous, established unmixing results for this image [55]. A myriad of other datasets
are present throughout the literature. In particular, for bayesian approaches the datasets
used include satellite data of the Martian surface [51], agricultural datasets [31], and
laboratory controlled datasets [32].
All in all, evaluation of many algorithms for unmixing remotely sensed datasets
within the literature has a qualitative bend. And even in the case where high-accuracy
ground truth is available, as in Cuprite [64], there are as of yet no quantitative approaches
to establish the correctness of endmember variance, even when it is a fundamental
component of the model used for unmixing.
2.4 Summary
There are a huge number of geometric based approaches to the spectral unmixing
problem [1]. Many of these methods assume the existence of the endmembers within
the data as pure pixels, but in highly mixed data this assumption does not hold [1].
Still others attempt to optimize an objective function with a regularization term in a
least-squares like fashion, but these methods suffer from sensitivity to user specified
parameters, and convergence to local minima.
Bayesian methods, on the other hand, do not suffer from many of the drawbacks
present in the geometric based approaches, but instead are hampered by intractable
posterior distributions and model complexity problems.
Some Bayesian approaches unintentionally expand the set of parameters, which
increases the complexity of resulting MCMC methods, and furthermore exacerbates the
problem of over-parametrization. Many other approaches balance parameter freedom
with increased parameter constraint, but often this constraint is not even based upon the
physical constraints of the spectral unmixing problem.
43

In fact, none of the current Bayesian approaches fully satisfies the constraints
imposed on spectral unmixing by properties of physics. Indeed, most hyperspectral
datasets are measured in units of Reflectance xi ,j ∈ [0, 1], but no Bayesian approach
has been found in the literature to constrain the endmembers appropriately (i.e. ek,j ∈
[0, 1]) on the feasible reflectance domain. The Normal Compositional Model makes a
similar assumption: The NCM represents endmembers as normal random variables,
which, while practical, is a physically invalid model, because the reflectance of physically
realizable endmembers can only exist on the unit cube: ek ∈ [0, 1]D , whereas a normal
distribution is nonzero everywhere in RD .
Finally, endmember spectra are easily observed to be highly correlated between
different bands [61]. And moreover, it is reasonable to expect that endmember variance
will be small in dimensions orthogonal to the data. However, despite this, MCMC
endmember covariance estimates for the NCM are often constrained to be diagonal and
constant, which prohibits the realization of many physically plausible solutions.
44

CHAPTER 3TECHNICAL APPROACH
The current state of the art Bayesian approaches to estimating endmember
distributions suffer from several problems.
First, endmember distributions are not constrained to lie in [0, 1], even though
physically realizable endmembers must satisfy this constraint. Second, spectral
variability is assumed to be symmetric when evidence suggests it is not. And finally,
dependency between different endmember bands is not accurately modeled.
This research describes a new model for the purposes of estimating endmember
distributions. This model utilizes distributions whose support is naturally [0, 1], are
non-Gaussian, and model dependency between spectral bands using copulas.
Additionally strategies for fully unmixing both the proportions and endmember
distributions are developed and presented. The effectiveness of this model and these
unmixing methods is compared to that of the Normal Compositional Model and relevant
state of the art unmixing methods.
3.1 Beta Compositional Model
When modeling endmember spectral variability using a distribution, the question
naturally arises, which distribution is most suitable? The Gaussian distribution, while
convenient due to its mathematical tractability, fails to accurately model the physical
constraints of the endmember distribution detection problem. Chiefly, that endmembers,
and thus their distributions, must be constrained on the domain of feasible reflectance
(i.e. [0, 1]). In light of this constraint, we present a new model using asymmetric
distributions whose support lies in [0, 1].
3.1.1 Definition
Recall that the Normal Compositional Model (Eqn. (3–2)), represents each pixel as
a sum of normal random variables.
45

xi =
M∑k=1
pik ek (3–1)
ek ∼ N(ek ,Vk) (3–2)
By comparison, the model presented in this document which we shall refer to as
the Beta Compositional Model (BCM) represents each pixel as a sum of beta random
variables.
xi =
M∑k=1
pik ek (3–3)
ek ∼ B(~αk , ~βk) (3–4)
Where the distribution B is a multivariate-beta whose marginal distributions are
independent and given by univariate beta distributions
Bi(x |αki , βki) =Γ(αki + βki)
Γ(αki)Γ(βki)xα−1(1− x)β−1 (3–5)
Γ(z) :=
∫ ∞
0
tz−1e−tdt (3–6)
Where Γ is the well known gamma function, and parameters for the distribution are
taken from the vectors ~αk , ~βk . We reiterate that in the standard formulation of the BCM,
all of the marginals are independent.
However, in this research we expand the BCM further by introducing dependence
between the marginal distributions Bi . The inter-dependency between these marginals,
in other words the relationship between the marginals and the joint distribution B, is
modeled by a function known as a copula. This new generalized, Copula-based Beta
Compositional Model, which we christen CBCM, can be written as follows
46

xi =
M∑k=1
pik ek (3–7)
ek ∼ B(~αk , ~βk ,Ck) (3–8)
BCDF (~α, ~β,C) := C (BCDF (α1, β1),BCDF (α2, β2), ...,BCDF (αD , βD)) (3–9)
Where CDF denotes a corresponding cumulative distribution function for each
random variable, and D is the dimensionality of each pixel. In this model we denote
Ck as a D-dimensional copula function for the k-th endmember distribution, with any
relevant parameters that control the form of the copula for the k-th endmember. Copulas
themselves shall be discussed in detail in a later section, as their estimation is inherently
important to accurately modeling the band-wise dependence of the endmembers.
CBCM, as introduced above, is a more general model than the BCM, and indeed setting
Ck to be the M-dimensional product function, yields the original formulation of the BCM.
Finally, note that the Beta distribution can be re-parameterized in terms of mean (µ)
and sample size (SS),
µi ,k := αi ,k/(βi ,k + αi ,k) (3–10)
SSi ,k := βi ,k + αi ,k (3–11)
B0(µi ,k ,SSi ,k) := B(αi ,k , βi ,k) (3–12)
The Beta distribution is a conjugate prior for the binomial distribution [8], thus
the term ”sample size” arises from this context, where α, β are integers with values
corresponding to prior observations on the binomial distribution. This reparametrization
yields an alternative form of the BCM shown below,
xi =
M∑k=1
pik ek (3–13)
ek ∼ B0(~µk , ~SSk) (3–14)
47

which is far more conducive to parameter estimation, and which we shall refer to
heavily in the following sections.
3.1.2 Choice of Distribution
An important clarification and motivational choice of this approach involves around
the selection of the beta distribution specifically. Indeed, why use the beta distribution,
and not some other distribution whose support is [0, 1], such as a truncated Gaussian?
The answer to this question lies in the second point that this approach means to
address, that is to say the non-Gaussianity of observed endmember distributions.
Figure 3-1 shows a histogram of hand-labeled data over Gulfport Mississippi [66],
this particular figure shows a histogram of pixel reflectance in the 0.56µm band for pixels
that have been labeled as ’Tree’. A key observation from this figure is the asymmetry
of the reflectance distribution in this band, something that can not be modeled well by a
Gaussian, truncated or no. This asymmetry is another facet of why the beta distribution
specifically was selected, although other asymmetric distributions whose support is [0, 1]
exist.
3.2 Review of Markov Chain Monte Carlo Methods
We have defined and described the Beta Compositional Model, with the goal of
using it to model high-dimensional HSI data. Training and optimization of high-dimensional
models is a difficult and open problem to this day. One predominant approach to tackling
such a high-dimensional optimization [67] is through the use of sampling, that is to say,
Monte Carlo methods.
Broadly speaking, Monte Carlo methods seek to generate samples from a desired
distribution, d(x), whose closed form is unknown or is otherwise computationally
expensive to compute directly [67, 68]. Markov Chain Monte Carlo (MCMC) methods
seek to accomplish this through the construction of a Markov Chain mechanism which
converges to the desired distribution d(x) and thus explores the state space in such a
way as to simulate sampling from d(x) directly [67].
48

A sequence of random variables C := {X1,X2, ...,Xn, ...}, is a Markov Chain if and
only if the conditional probability of Xn given X1, ...,Xn−1 depends only on Xn−1 [69]:
p(xn|xn−1, ..., x2, x1) = p(xn|xn−1) (3–15)
If this transition probability is also known as the transition kernel [68].
K nC(xn, xn−1) := p(xn|xn−1) (3–16)
A Markov chain is said to be homogeneous if K n = K 1 = K for all n. That is to say,
the transition probabilities are independent of the chain index n. It can be shown [8] that
any homogeneous Markov chain will always have a stationary distribution.
Formally, a distribution d(x) is stationary with respect to a homogeneous Markov
chain with transition kernel KC if
d(x) =∑x0
KC(x , x0)d(x0) (3–17)
In order to ensure that the stationary distribution is the desired distribution d(x) it
is sufficient, but not necessary, for the transition kernel to satisfy a property known as
detailed balance [8, 67]:
d(xn)KC(xn, xn−1) = d(xn−1)KC(xn−1, xn) (3–18)
It is important to note that a given Markov Chain can have multiple invariant
distributions. However, if a homogeneous Markov Chain satisfies a property known
as ergodicity, then p(xn) → d(x) as n → ∞ irregardless of the starting point X0. It can
be shown that a homogeneous Markov Chain will be ergodic under certain, very weak,
49

restrictions [8]. For more details on ergodicity and convergence of Markov Chains we
refer the reader to [68].
In the following sections we focus on two, widely-used, approaches to construct
ergodic homogeneous Markov Chains : Metropolis-Hastings, and Gibbs Sampling. Both
of which are used extensively in the presented methods.
3.2.1 Metropolis Hastings
The Metropolis-Hastings (MH) approach to constructing an MCMC sampler
explicitly defines a transition kernel through the aid of a proposal distribution q(x |y).
KC(xn+1, xn) := min(1,d(xn+1)q(xn+1|xn)d(xn)q(xn|xn+1)
) (3–19)
Where d is the stationary distribution. Observe that a general requirement for this
kernel to be evaluated and used is the ratio d(y)/q(y |x) must be known up to a constant
independent of x [68]. The full Metropolis Hastings algorithm is given below.
Metropolis-Hastings1: Initialize the Markov Chain with a sample x0 ∼ p(X0).2: loop3: Given the current state of the Markov Chain : xt , generate y ∼ q(y |xt)4: Generate a value v ∈ (0, 1).5: if v < KC(y , xn) (Eqn. 3–19) then6: Accept the new sample : xt+1 ← y7: else8: Reject the new sample : xt+1 ← xt .9: end if
10: end loop
It can be shown that by construction [8, 67] detailed balance (Eqn. 3–18) is
satisfied, and under some other minimal requirements [68], the chain is ergodic and
converges to d .
The key facet of Metropolis Hastings, then, is form of the proposal distribution q.
Setting a proposal distribution with a very tight variance would result in minimal rejection
rates, but slow convergence. Conversely, setting a large proposal distribution would
50

result in too many sample rejections within the chain. Typically, for Metropolis-Hastings
(and other MCMC methods in general) a burn-in period is also used where samples are
discarded until the chain has neared the stationary distribution. Also, samples taken
every iteration are not independent, so any methods desiring independent samples from
a distribution must take this into account [8, 68].
Therefore care must be taken to select the proposal distribution appropriate to the
parameter and model at hand [68]. In our case the target distribution d will correspond
to posterior distributions over model parameters for the BCM.
3.2.2 Gibbs Sampling
Suppose we have an n-dimensional vector of parameters θ, with full conditional
forms readily available:
p(θi |θ−i) := p(θi |θ1, ..., θi−1, θi+1, ..., θn) (3–20)
But with the joint distribution p(~θ) unknown. Gibbs sampling utilizes the conditionals
to generate a sample from the joint distribution as follows [8]
Gibbs Sampling1: Initialize parameters ~θ2: loop3: for i = 1 to n do4: Sample θ0i from p(θ0i |θ01, ..., θ0i−1, θi+1, ..., θn)5: end for6: ~θ ← ~θ0
7: If sufficiently many iterations have gone by, store the sample ~θ.8: end loop
Gibbs sampling can be seen as a specific case of MH. Indeed if we define a
proposal distribution for the i ’th conditional as follows
qi(~θ0|~θ) = p(θ0i |θ−i) (3–21)
51

That is to say, at each step of the Markov chain all but the i -th parameter are fixed,
and the MH acceptance rate is always 1 [8]. Furthermore, it is straightforward to show
the joint distribution p(~θ) is the stationary distribution of this Markov chain [8, 67].
3.2.3 Metropolis within Gibbs
A special case of Gibbs sampling which we will refer to extensively is known as
Metropolis-within-Gibbs. The idea behind this algorithm is to use Gibbs sampling to
determine the parameters of a model when the conditional distributions are not readily
available [67]. Instead of sampling directly from p(θ0i |θ01, ..., θ0i−1, θi+1, ..., θn) in the Gibbs
Sampler (Algorithm 8) we sample from p(θ0i |θ01, ..., θ0i−1, θi+1, ..., θn) by first constructing a
Markov Chain that converges to this distribution via a Metropolis-Hastings step.
Thus, each such step requires the specification of a proposal distribution for each
conditional and a proper convergence criterion. Unfortunately, while there are large
bounds on the convergence criteria of such Markov Chains [68], the and rate speed of
convergence is sensitive to initialization and choice of proposal an open problem to this
day [67].
3.3 Review of Copulas
Another concept integral to this research is the copula. This concept has been
present in statistical literature for many years [7], but recently has seen an uptake in
many statistical applications as copulas allow one to easily estimate marginals and
dependency of multivariate distributions separately. In this section we briefly review the
concept of a copula, and discuss relevant copulas to the proposed research.
3.3.1 Definition
Copulas are tools for modeling dependence of several random variables. The word
copula is a Latin noun that means ”A link, tie, bond” [7]. To give a brief motivational
example consider two random variables X and Y , with corresponding cumulative
distributions F (x) = P(X ≤ x), and G(y) = P(Y ≤ y). We can consider the joint
52

distribution of both variables as H(x , y) = P(X ≤ x and Y ≤ y). In the case that X and
Y are independent it is clear that
H(x , y) = F (x)G(y)
However in the general case for which we can not assume independence, the
relationship between the marginal distribution functions (F ,G ), and the joint distribution
function (H) is given by a copula, C .
H(x , y) = C(F (x),G(y))
Formally, a copula has the following definition [7].
Definition 1. A D-dimensional copula C : [0, 1]D → [0, 1], is a function which is a
cumulative distribution function with uniform marginals.
Equivalently, a Copula can be defined in direct analytical terms as follows
Definition 2. A D-dimensional copula C : [0, 1]D → [0, 1], is a function which satisfies
the following properties:
• C(a1, ..., an, 0, an+2, ...) = 0
• C(1, ..., 1, an+1, 1, ...) = an+1
• C is D-increasing. That is, for all hypercubes B =∏Di=1[xi , yi ] with xi < yi ∈ [0, 1],
their C-volume is positive:∑v∈vert(B)(−1)#{k : xk=vk}C(v) ≥ 0
where vert(B) is the set of vertices of the hypercube B.
Indeed, the marginal CDF for each component can be obtained from a copula by
setting all other values to one. A visualization of the independence copula C(u, v) = u∗v
which was used in the previous example, is shown in Figure 3-2. Other examples
53

of simple copulas include the comonotonicity copula C(u, v) = min{u, v} and
countermonotonicity copula C(u, v) = max{0, u + v − 1}.
3.3.2 Sklar’s Theorem
An important theorem in the study of copulas, crucial to the copulas referred to in
the proposed approach is Sklar’s Theorem [7, 70]:
Theorem 3.1. Let H(x1, ..., xn) be a joint cumulative distribution function with marginal
cumulative distribution functions F1, ..., Fn, then there exists a copula C such that
C(F1(x1), ...,Fn(xn)) = H(x1, ..., xn). This copula is unique if F1, ... , Fn are continuous.
This theorem has several important implications. First, every multivariate distribution
can be completely described by the marginals and a copula. Second, we can extract
a copula from any multivariate distribution with known joint and known marginal
distributions. In fact this copula in general can be given by
CH(u1, u2, ...un) := H(F−11 (u1), ...,F
−1n (un))
Third, given a copula we can generate many different multivariate distributions by
selecting different marginal CDFs. And finally, the marginals and copula can be learned
separately in the context of model-fitting and parameter estimation.
3.3.3 Gaussian Copula
As mentioned in the previous section, given a multivariate distribution with known
joint and known marginal distributions, we can extract a copula. Then, by selecting
different margins, we can construct different multi-variate distributions. This is an
approach used fairly often within existing literature [7, 70], with one of the most widely
used distributions for copula extraction being the Gaussian.
The Gaussian copula can be formally defined in a manner similar to Eqn. 3–22
54

CΦ(u1, u2, ...un) := ΦΣ(Φ−1(u1), ..., Φ
−1(un))
Here Φ is the standard normal cumulative distribution function, and ΦΣ, is the joint
Gaussian CDF with covariance matrix Σ and mean zero. A plot of the Gaussian copula,
and corresponding probability density function are shown in Figures 3-3,3-4.
The Gaussian copula is of particular interest for this proposal due to recent studies
of Gaussian copulas in a Bayesian context [71], although this approach has yet to be
applied in the context of Bayesian spectral unmixing, particularly with respect to the
estimation of endmember distributions.
3.3.4 Archimedian Copulas
A d-dimensional copula is called Archimedian if it permits the representation
C(u1, ..., un) = ψ(ψ−1(u1) + ... + ψ−1(un))
Where ui ∈ [0, 1] and ψ is known as an ”Archimedian generator”. McNeil et al. [72]
give the following definition for an Archimedian generator:
Definition 3. A non-increasing and continuous function ψ : [0,∞) → [0, 1] which
satisfies the conditions ψ(0) = 1 and limx→∞ψ(x) = 0 and is strictly decreasing on
[0, inf {x : ψ(x) = 0}) is called an Archimedian Generator
Several well known and widely used families of copulas exist that satisfy the
property of being Archimedian. For example, among these are the Clayton, Gumbel
copulas [7, 72], with generators ψ(t) = (1 + θt)−1θ , and ψ(t) = e−t
1θ . All such copulas
share a single, very desirable property, in the parameter θ, which is typically a single
positive real number. Unlike the Gaussian copula, this parameter does not scale with
dimension, and so is comparatively simpler to estimate [72].
55

In the following section we outline a strategy for unmixing the Beta Compositional
Model first without then with copulas.
3.4 BBCM : A Bayesian Unmixing of the Beta Compositional Model
A novel model of hyperspectral data that models endmembers as multivariate beta
distributions has been presented in the preceding sections. In this section, new methods
for unmixing this model and their technical aspects are developed and described in
detail.
We begin by describing Bayesian unmixing with the BCM in the case of band-wise
independence, describe an analogous method for Bayesian endmember distribution
detection, and combine the two in a Metropolis-within-Gibbs sampler for full Bayesian
unmixing of the BCM. Then, we expand on these techniques and construct a Bayesian
unmixing algorithm for the band-wise dependent CBCM. Empirical results for all of these
methods are given in the next chapter.
3.4.1 Sum of Betas Approximation
If the model we use to describe hyperspectral data is the standard, non-copula
based BCM then, the entire unmixing model can be considered band-wise independent
with respect to endmembers, and we can apply a very useful approximation : that the
sum of beta random variables can be approximated by a beta random variable [73, 74],
and thus the likelihood distribution for our model can also be approximated in this way.
To define the approximation, fix a band, and consider the BCM from before:
y =
M∑k=1
pk ek (3–22)
ek ∼ B(αk , βk) (3–23)
Then, following the approach used in [74], we approximate y ∼ B(a, b), then
determine a relation between a, b and αk , βk , by equating first and second moments:
56

a = Fb (3–24)
b =F
S(1 + F )3− 1
1 + F(3–25)
E :=
M∑k=1
pkE(ek) (3–26)
F :=E
1− E(3–27)
S :=
M∑k=1
p2kVar(ek) (3–28)
Note also that,
E(ek) =αk
αk + βk(3–29)
Var(ek) =αkβk
(αk + βk)2(α+ β + 1)(3–30)
.
Recent, collaborative work in this area [75] has unmixed this model by fitting a
beta distribution to each band in any candidate dataset yielding direct estimates of the
quantities E ,F ,S , for each pixel. Taken over all bands, these become vector quantities,
and the proportions P can be estimated via quadratic programming or MCMC[75].
However, this method suffers from a limitation in that a fitting of a beta distribution
is necessary for each pixel, which is accomplished through a K-means clustering
around each data point. If the data are highly mixed, or the K-means clustering fails to
accurately model the likelihood distribution, this method fails to accurately unmix the
data [75]. The parameters of the endmember distributions also cannot be estimated with
this approach.
57

The approach taken herein is different and far broader in scope: We estimate the
posterior distribution of all the parameters ~αk , ~βk , P in a fully Bayesian manner, using the
full likelihood of the BCM:
p(X|~β, ~α,P) =N∏i=1
B(xi ; ai ,bi) (3–31)
Specifics are given in the following sections, and an empirical comparison of this
approach to the method given in [75] can be seen in Section 4.1.1.
3.4.2 Bayesian Proportion Estimation
Given a hyperspectral dataset X, and endmember distributions with parameters
~αk , ~βk , we develop and describe a new, simpler method to determine the full set of
proportions P = [~p1,~p2, ...,~pN ].
Observe that the likelihood (Equation 3–40) is a product over each pixel, and
unmixed proportions for pixel xi do not inherently depend on the proportions of any other
pixel xj .
Therefore, we can estimate the proportions for each pixel independently. To do so,
we define a uniform Dirichlet prior:
p(pi |θi) = Dir(pi ; 1) (3–32)
Where uniform indicates equal probability over an M-dimensional simplex.
Subsequently this prior yields a posterior distribution for the BCM :
p(pi |xi , ~α, ~β,θi) ∝ B(xi ; ai ,bi)Dir(pi ;θi) (3–33)
We cannot sample from this posterior directly, however, we can evaluate the
posterior (up to a normalization constant) at any point. Approaches such as Rejection
58

sampling [8] could be used, but would be prohibitively slow due to the high dimensionality
of the space. So, instead we use methods based on Markov Chains which have proven
suitable for handling high-dimensional problems [8]. Indeed, we can construct a Markov
Chain via the Metropolis-Hastings method (See Section 3.2.1) which converges to this
posterior distribution and sample from that.
Metropolis-Hastings requires the definition of a proposal distribution, and we
investigate two different choices
q(px |py) = Dir(px ; 1) (3–34)
q(px |py) = Dir(px ;max(10py, 1)) (3–35)
A Uniform proposal distribution and a proposal distribution approximately mean-centered
about the previous sample. By running the MCMC sampler on each individual pixel we
obtain a full-distribution estimate of pi . Thus, running samplers for all pixels in parallel
gives us a fast fully Bayesian estimate of all the proportions P.
3.4.3 Bayesian Endmember Distribution Estimation
Given a hyperspectral dataset X, and known proportions P we develop and
describe a fully Bayesian method to determine the endmember distributions B(~αk , ~βk),
which is to say determining the parameters of these distributions ~αk and ~βk .
Investigations into such a method have shown that re-parameterizing the beta
distribution in terms of parameters which we shall refer to as Mean and Sample Size
(Eqn. 3–14), makes formulation of MCMC sampling far more straightforward. The
re-parametrization of the beta-distribution is given again below.
µi ,k := αi ,k/(βi ,k + αi ,k) (3–36)
SSi ,k := βi ,k + αi ,k (3–37)
59

And so we adopt the notation B0 for this new parametrization.
B0(~µk , ~SSk) = B(~αk , ~βk) (3–38)
Unlike the proportion estimation step, the estimation of the endmember distributions
is not and cannot be independent for each pixel. However, it can be independent for
each band. Indeed, the likelihood of the BCM given X can be rewritten
p(X|~µ, ~SS,P) =D∏j=1
N∏i=1
B(xi ,j ; ai ,j , bi ,j) (3–39)
Where j iterates over each of the D bands in the HSI data X . And the likelihood of a
single band j is given by
p(Xj |µj ,SSj ,P) =N∏i=1
B(xi ,j ; ai ,j , bi ,j) (3–40)
Where we adopt the notation of superscript Xj is a vector of all HSI data in the
j-th band only. µj ,SSj are parameter vectors for the beta endmember distributions but
only the parameters for the j − th band, and P is the matrix of proportions as before.
As with the proportion step, we exploit this factorization by running MCMC samplers
independently, this time over each band.
Mean estimation
To estimate the mean of all M endmember distributions in the j ’th band : µj , we
define the following M-dimensional prior over the mean :
p(µj) = U(0, 1) (3–41)
60

Since we expect endmember distributions to be in the feasible domain of reflectance.
This prior yields a posterior distribution for the mean given below.
p(µj |Xj ,SSj ,P) ∝N∏i=1
B(xi ,j ; ai ,j , bi ,j)U(0, 1) (3–42)
Unfortunately, we can not sample from this posterior directly, however, we can
evaluate the posterior (up to a normalization constant) at any point. So, as with the
proportions, we can construct a Markov Chain via the Metropolis-Hastings method (See
Section 3.2.1) which converges to this posterior distribution and sample from that.
Metropolis-Hastings requires the definition of a proposal distribution, and the
method we use is a beta distribution whose mode is the current sample µy , the mean of
all M endmember distributions in the j−th band.
qµ(µx |µy) = B0(µx ;Mγ(µy),Sγ) (3–43)
Mγ(µy) :=µy(Sγ − 2)− 1
Sγ(3–44)
Sγ := 10/γ (3–45)
Here γ is a parameter whose value controls the precision of the proposal distribution.
For all of our purposes γ was set to γ :=√
Var(X)/10, This value was set after trial
experimental values on synthetic datasets, the intuition behind it being that in order for
the Markov Chain to converge quickly the variance of the proposal distribution should
reflect the variance of the dataset, in order to avoid the problem of a high rejection rate,
or a slow convergence rate [8].
As an aside, the setting of γ is an open problem for this strategy, and is a potential
development point for future supervised unmixing algorithms based on the Beta
Compositional Model. However, for purposes of brevity and for introduction of this
61

novel unmixing strategy we have stuck with this value and leave the optimality of this
construction to future work.
Now, if we assume the Sample Size in the j-th band SSj is known or fixed, we can
run a MH sampler with proposal q to generate samples µj . Repeating this for all bands
j and since all bands are independent we can generate samples from the posterior
distribution of µ. Moreover, we can run these samplers in parallel over j, making this
approach highly-parallelizeable (up to a factor of D).
Sample size estimation
To estimate the sample size of all M endmember distributions in the j ’th band : SSj ,
we define the following M-dimensional prior over the sample size :
p(SSj) = J(1,∞) (3–46)
Where J is a non-informative Jeffery’s prior over the interval (1,∞). This prior yields
a posterior distribution for the sample size given below.
p(SSj |Xj ,µj ,P) ∝N∏i=1
B(xi ,j ; ai ,j , bi ,j)J(1,∞) (3–47)
As before, it is intractable to draw a sample directly from this posterior, so instead
we evaluate the ratio of the posteriors (up to a normalization constant) at any point (the
priors cancel), and proceed by constructing another MH sampler.
For the proposal distribution of the sample size we use
qSS(SSx |SSy) = Gamma+1(SSx ;SSy + 1, 1) (3–48)
A uniform shifted Γ distribution whose support is (1,∞), and whose mean is over
the previous sample size, with scale parameter equal to unity.
62

With this choice of proposal distribution, unmixing is completely unsupervised.
This time, if we assume the mean in the j-th band µj is known or fixed, we can run a
MH sampler with proposal q to generate samples SSj . Repeating this for all bands j and
since all bands are independent we can generate samples from the posterior distribution
of SS by running Markov Chains in different bands in parallel, and we have unmixed part
of the endmember distributions and in an unsupervised highly parallel manner.
3.4.4 BBCM : A Gibbs Sampler for Full Bayesian Unmixing of the BCM
When estimating the proportions, means, and sample sizes of the endmember
distributions we constructed MCMC Metropolis-Hastings samplers in order to estimate
the conditional posterior distributions. In order to get a sample from the joint posterior
distribution, given by
p(P, ~α, ~β|X) (3–49)
We combine samples from the conditional distributions in order to generate a
sample from the joint distribution through an approach known as Gibbs Sampling (See
Section 3.2.2). The full Bayesian unmixing algorithm for the Beta Compositional Model
which we shall refer to as BBCM, is given below.
BBCM : Gibbs Sampler1: Initialize ~µ, ~SS,P.2: for Each Sampler Step do3: for i = 1 to N do4: Run a MH step with proposal Eqn. 3–35.5: Generate one sample p0i ∼ p(pi |xi , ~µ, ~SS)6: end for7: P← P08: for all bands j do9: Run a MH step with proposal Eqn. 3–45
10: Generate one sample µj0 ∼ p(µj |Xj ,P,SSj)
11: end for12: ~µ← ~µ013: for all bands j do
63
14: Run a MH step with proposal Eqn. 3–4815: Generate one Sample SSj0 ∼ p(SS
j |Xj ,P,µj)16: end for17: ~SS← ~SS018: The set ~µ, ~SS,P is a sample from the joint posterior (Eqn. 3–83), store it.19: end for
The end result of the algorithm is a set of samples from a Markov Chain whose
stationary distribution is given by Equation 3–83. Storing every 5-th sample to minimize
dependence and taking a varying amount of burn in samples depending on the number
of endmembers and complexity of the dataset, we arrive at a histogram of the samples
from the joint distribution. Then the Maximum A Posteriori of all parameters can be
found simply by looking at this histogram, and the model has been unmixed. Empirical
results of BBCM compared to state of the art NCM and LMM unmixing methods are
given in the following chapter.
3.5 BCBCM : Unmixing the Copula-based Beta Compositional Model
If we introduce a non-trivial copula into our endmember distributions, then the
assumption of independence no longer holds and subsequently we can no longer
analyze each band independently.
The question then arises, if we view the CBCM as a generative model, what does
the full distribution of xi , and subsequently the likelihood distribution, look like. Recall the
BCM formulation given below.
xi =
M∑k=1
pik ek (3–50)
ek ∼ B(~αk , ~βk) (3–51)
In general, the sum of independent random variables can be expressed as a
convolution. However, due to the high dimensionality of the data this convolution is
prohibitively expensive to compute for the BCM, and no analytical closed form is known
to exist. Indeed, the formulation of the likelihood would be extremely expensive to
64

calculate point-wise even for a single pixel, and any MCMC-based methods applied to
such an approach will be prohibitively time consuming.
An approximation based approach similar to the approach used for the BCM can,
however, be used. Several possibilities for approximation exist. For example, the sum of
multivariate betas with certain copulas could be modeled as a multivariate beta with a
different copula. If we take the CBCM for each pixel y:
y =
M∑k=1
pk ek (3–52)
ek ∼ B(~αk , ~βk ,Ck) (3–53)
Then, again as in [74] and Section 3.4.1, we can approximate y ∼ B(a,b,C), then
determine a relation between a,b and ~αk , ~βk , by equating first and second moments:
a = Fb (3–54)
b =F
S(1 + F )3− 1
1 + F(3–55)
E :=
M∑k=1
pkE(ek) (3–56)
F :=E
1− E(3–57)
S :=
M∑k=1
p2kVar(ek) (3–58)
However, the problem with this approach is the determination and form of C , and
this formulation of C is the focal point of the difference between spectral unmixing of the
BCM and the more general CBCM.
65

3.5.1 Likelihood Approximation
Indeed, C is non-trivial to determine and many different approaches were attempted
to determine C . One such approach involves taking expectations with respect to M − 1
endmember distributions
y ∼M∑
j=1,j 6=k
pijE [ej ] + pik ek (3–59)
ek ∼ B(~αk , ~βk ,Ck) (3–60)
Then it can be easily seen that C = Ck . However this approach requires an EM-like
step and proved too inaccurate. A sampling approach was also tried, where samples
were generated from ek , summed, then used to estimate the copula C . However, due to
the large number of samples needed to estimate C accurately, this approach was found
infeasible due to large time complexity.
A simpler approach was discovered by analogy to the NCM. In the case of the
Normal Model, C can be seen to be as a Gaussian copula with a correlation matrix
corresponding to the covariance of the likelihood given below.
Cov(y) =
M∑k=1
p2ikCov(ek) (3–61)
(3–62)
In the case of the CBCM, if we assume the copula of y has or can be approximated
by a Gaussian Copula C , then the main idea of this approach is perhaps we can
estimate C by looking at the covariance.
If there is a monotonic, easily computable, mapping between Covariance and
copula parameter, for the Gaussian copula, then using the individual copulas of
endmember distributions Ck we can determine the copula of the likelihood C , through a
simple application of this mapping and its inverse,
66

C Ck (3–63)
↑ ↓ (3–64)
Cov(y) =∑Mk=1 p
2ik Cov(ek) (3–65)
(3–66)
This relationship between Covariance and Copula is explored sparsely in the
literature. The work of Kugiumtzis et al. [76] which studies monotonic transformations of
bivariate normal random variables, indirectly determines this relationship in the case of
a Gaussian Copula. Indeed this relationship is monotonic in this case [76, 77], provided
the marginals are continuous. The proof is non-trivial and is dependent upon properties
of the normal distribution [77].
However, this relationship is monotonic for other copulas as well. We present a
more general, but simpler proof, not restricted to the Gaussian Copula, based upon
a result derived by Hoeffding [78, 79]. Indeed, in section 3.6, we prove that this
relationship is in fact monotonic for all continuous probability distributions with finite
support, and for all types of copula that satisfy a ”total concordance ordering” [80]
property. Such a proof is novel, and is not present in the literature.
However, despite this monotonicity this relationship can not be described in a closed
form for many marginal distributions (Beta included) [76]. In the following section we
approximate this relationship for each pair of bands in the case of a Gaussian Copula in
a piecewise linear manner, similar to [76]. A similar relationship could be derived for any
copula satisfying our key property, as well as models having different marginals.
3.5.2 Covariance and Copula
We would like to explicitly define this mapping between copula and covariance. It
turns out we can define this mapping by considering each pair of bands individually, as
follows.
67

Consider two bands (b1b2) of an endmember distribution e. Marginally speaking,
these are beta random variables
b1 ∼ B(α1, β1) (3–67)
b2 ∼ B(α2, β2) (3–68)
(3–69)
Where
p(b1 = x) =Γ(α1 + β1)
Γ(α1)Γ(β1)xα1−1(1− x)β1−1 (3–70)
p(b2 = x) =Γ(α2 + β2)
Γ(α2)Γ(β2)xα2−1(1− x)β2−1 (3–71)
b1,b2 are not independent in the CBCM model, and their dependency can
be expressed by the bivariate Gaussian Copula corresponding to the endmember
distribution e. Denote this copula by Cσ, with corresponding pdf cσ, where the copula
has 2x2 correlation matrix Σ, with unit diagonals Σ(1, 1) = Σ(2, 2) = 1 and off diagonal
Σ(1, 2) = Σ(2, 1) = σ (See Section 3.3.3 for the definition of a Gaussian Copula).
Note that, by properties of the Gaussian, σ is the coefficient of dependency in both
the full correlation matrix of the Gaussian Copula of e over all bands, and the bivariate
Gaussian copula marginal corresponding to these two bands only.
Then, letting b = [b1;b2], x = [x1; x2], it can be easily shown that the pdf of the joint
distribution is given by
p(b = x) = p(b1 = x1)p(b2 = x2)cσ(p(b1 < x1), p(b2 < x2)) (3–72)
68

However p(b1 < x1), the CDF of b1, has no closed form for non-integer values of
α1, β1, and is given by the incomplete beta function, an integral. So the joint distribution
(the distribution of b) has no closed form either.
The covariance of this distribution, as a function of σ can be expressed as an
expected value, shown below
Covσ(b1,b2) = E [b1b2]− E [b1]E [b2] (3–73)
E [b1b2] :=
∫ ∫x1x2p(b = x)dx1dx2 (3–74)
However, our distribution has no closed form, and thus E [b1b2] has no closed form
either, and neither does the Covariance.
Fix the marginal distributions and their parameters b1,b2, and let the dependency σ
vary. This dependency takes the form of a correlation parameter in a bivariate Gaussian
copula, and can vary from -1 to 1. Let V1 = Var(b1),V2 = Var(b2).
Consider the mapping,
F1,2(σ) := Covσ(b1,b2) ∗1√V1V2
(3–75)
Thus, F is a function that maps a copula parameter (σ) into the domain of linear
correlation, [−1, 1]. This expression above is our desired mapping, and is discussed in
more detail in a more general context in [76]. As we prove in the following sections, it is
monotonic in σ.
However, since the covariance has no closed form, this mapping also has no closed
form. But, it can be modeled through a combination of interpolation and sampling.
Recall that the sample covariance of a set of points xi , yi is an estimate for the true
covariance, and given by
69

Cov(xi , yi) =1
N − 1
N∑i=1
(xi − µx)(yi − µy) (3–76)
µx =1
N
N∑j=1
xi (3–77)
µy =1
N
N∑j=1
yi (3–78)
For a large set of different σ, we calculate this sample covariance drawn from
a large set of pairs of different marginal distributions b1,b2 and their corresponding
parameters α1,α2, β1, β2.
A 5-dimensional interpolation over all the parameters is then performed to construct
the mapping. A similar interpolation (with F (σ) in place of σ) is used for the inverse map.
Specifics and accuracy of this approximation to Eqn. 3–75 appear in the results section.
3.5.3 Copula Calculation
The expression in Eqn. 3–75 can be applied to give the copula of the likelihood of
pixel y.
C = F−1(Cov(y)) (3–79)
= F−1(
M∑k=1
p2ikCov(ek)) (3–80)
= F−1(
M∑k=1
p2ikF (ΣCk)) (3–81)
Where F is a matrix operator, whose element-wise mappings are given by Eqn.
3–75, with the appropriate pair of bands and their marginal distributions and variances.
Here ΣCk is also the correlation matrix of the Gaussian copula Ck . Now that we have
constructed a formula for the calculation of C , recall that the likelihood approximation is
given by
70

y ∼ B(a,b,C) = (D∏j=1
B(yj ; aj , bj))c(CDF1(y1),CDF2(y2), ...,CDFD(yD)) (3–82)
Where a, b are defined in Eqn. 3–58 and above, c is the pdf of the Gaussian copula
C (Eqn. 3–81), and CDFj(yj) = BCDF (yj ; aj , bj).
We can then use this likelihood as part of a Metropolis Hastings unmixing method.
3.5.4 BCBCM : Metropolis Hastings
With this copula approximation of the likelihood in mind, we would like to, ideally
estimate a sample from the joint distribution of all posterior parameters of the CBCM by
adapting the approach used for the BCM to include an estimation step for the copula
function Ck .
p(P, ~α, ~β,C|xi) (3–83)
This is a monumental problem, namely due to the breadth of parameters to estimate
(an additional MD2 for the copula parameters), and the additional time complexity
resulting from a more complicated likelihood distribution. Consider that no Bayesian
full-unmixing algorithm exists even for the normal compositional model, which has a
significantly simpler likelihood.
Due to the relative intractability of exploring the full joint posterior, we develop a
Bayesian unmixing algorithm for just the proportions, assuming all other parameters are
known. That is we sample from,
p(P|X, ~α, ~β,C) (3–84)
Using a Metropolis-Hastings method, analogous to that given in Section 3.4.2, given
below.
71

BCBCM : Metropolis1: Initialize ~µ, ~SS,P,C.2: for Each Sampler Step do3: for i = 1 to N do4: Run a single MH step with proposal Eqn. 3–35.5: Generate one sample p0i ∼ p(pi |xi , ~µ, ~SS,C)6: end for7: P is a sample from the posterior (Eqn. 3–84), if K steps have gone by since the
last storage, store it.8: end for
Where C = [C1,C2, ...,CM ], the D-dimensional copulas of the endmember
distributions. The proposal distribution and prior distribution used are the same as
given for BBCM (See sec. 3.4.2).
Recall that the end result of the algorithm is a set of samples from a Markov Chain
whose stationary distribution is given by Equation 3–84. Taking every 30-th sample
for independence, and with varying burn in depending on the number of endmembers
and complexity of the dataset, we arrive at a histogram of the samples from the joint
distribution. Then, as before, the Maximum A Posteriori of all parameters can be found
simply by looking at this histogram, and the unmixing is completed. Empirical results
of BCBCM compared to other state of the art unmixing methods appear in the next
chapter.
3.6 A New Theorem on Copulas and Covariance
In this section we describe a novel theorem describing the relationship between
covariance and certain types of copula provided the marginals are continuous and have
finite support. This relationship was discovered as a side effect of the work detailed and
the methods used in the preceding sections.
Now, it is well known that for a bivariate distribution with Gaussian copula, a
measure of rank covariance (Spearman’s Rho) [79] is sufficient to uniquely determine
the copula. What we show is that covariance by itself (and subsequently Pearson’s
Linear Correlation Coefficient), irregardless of the marginal distributions, as long as
72

they are known, is sufficient to uniquely determine the copula, and subsequently the
rank covariance, under certain assumptions. Indeed, this result shows that, for certain
families of copulas covariance and rank covariance are monotonically related.
Definition 4. A parametrization of a copula family C(u, v ;σ) is said to satisfy a concor-
dance ordering property with respect to σ if σ1 ≤ σ2 =⇒ ∀u, v ∈ [0, 1]2C(u, v ;σ1) ≤
C(u, v ;σ2)
With this property in mind we can state the main result of this section.
Theorem 3.2. Let X ,Y be continuous dependent random variables over interval
subsets of the real line, with marginal cumulative distributions F (x),G(y) and copula
C(u, v ;σ) satisfying the concordance ordering property with respect to σ. If the marginal
distributions of X ,Y are fixed, then Cov(X ,Y ) as a function of σ is monotonic.
Proof. Without loss of generality, these interval subsets are both [0, 1]. X ,Y have
marginal distribution cdfs given by F (x), G(y), and a Copula C(u, v ;σ). so the joint cdf
(say H(x , y)) is then given by Hσ(x , y) = C(F (x),G(y);σ), recall that copula function is
by definition a CDF with uniform marginals.
A fundamental result derived by Hoeffding in the 1940s [78, 79] relates the
covariance and the joint and marginal CDF distributions as follows.
Cov(X ,Y ) =
∫ 10
∫ 10
H(x , y)− F (x)G(y)dxdy (3–85)
Where we have adjusted the integral limits accordingly to the domain of X ,Y .
Now, Let X1,X2 = X , Y1,Y2 = Y be identical copies of X ,Y but jointly distributed
with different copulas.
73

(X1,Y1) ∼ H(X1,Y1) = C(F (X1),F (Y1);σ1) (3–86)
(X1,Y1) ∼ H(X2,Y2) = C(F (X2),F (Y2);σ2) (3–87)
Observe that the marginals in Eqn. 3–85 are the same for X1,Y1 and X2,Y2, so
writing K :=∫ 10
∫ 10F (x)G(y) and applying Eqn. 3–85 we have.
Cov(X1,Y1) = K +
∫ 10
∫ 10
Hσ1(x , y)dxdy (3–88)
Cov(X2,Y2) = K +
∫ 10
∫ 10
Hσ2(x , y)dxdy (3–89)
Then, applying the properties of concordance for the copulas of H, we have that
σ1 ≥ σ2 => ∀u, v ∈ [0, 1] C(u, v ;σ1) ≥ C(u, v ;σ2) (3–90)
=> ∀x , y C(F (x),G(y); σ1) ≥ C(F (x),G(y);σ2) (3–91)
=> ∀x , y Hσ1(x , y) ≥ Hσ2(x , y) (3–92)
=> Cov(X1,Y1) ≥ Cov(X2,Y2) (3–93)
Which proves monotonicity with respect to σ.
This theorem is related to the theorem given in [77] which relates to monotonic
transformations of bivariate normal random variables. Applying the work in [77] to
copula theory, the cdf of the marginal and inverse normal comprise such a monotonic
transformation, providing an alternative proof of this theorem specifically for Gaussian
Copulas.
However, many other copula families, including the t-copula, the Clayton, Frank, and
Gumbel all have this property [81, 82]. We have shown that knowing the covariance is
74

sufficient to determine the copula, if it is in one of these families, a fact that we will use in
our strategy for likelihood approximation of CBCM.
This brings us to matters of rank covariance and correlation, and some interesting
implications.
Corollary 1. For a bivariate pair of dependent rvs X ,Y with known marginal distribu-
tions and Gaussian copula C , the covariance can be used to uniquely determine the
rank covariance and rank correlation statistics.
Proof. As a result from Cuadras [79] and others, the linear correlation of the rank,
known as Spearman’s rho, can be determined uniquely for a bivariate distribution with
copula C by the following formula (again a consequence of the work of Hoeffding [79]).
ρS = 12
∫ 10
∫ 10
C(u, v ;σ)− uvdudv (3–94)
If C satisfies the concordance ordering property this relationship is, by the same
proof strategy used in the theorem, monotonic in σ. By transitivity and the preceding
theorem, the covariance has a monotonic relationship with ρS , for fixed continuous
marginals.
In fact, for many copula families this relationship is bijective on [-1,1] [79, 82],
whereas for linear (i.e. Pearson Product Moment) correlation the bijectivity does not hold
(although the monotonicity proved herein, implies a one-to-one relationship), which is
to say there is, depending on the marginals used, a theoretical maximum and minimum
linear correlation in (-1,1).
As a consequence to the theorem proved herein Spearman’s Rho (a measure
of linear correlation on rank), and other rank correlation metrics can be uniquely
determined by covariance, provided once again, that the copula of the underlying
distribution is part of a totally ordered family, and the marginals are known.
75
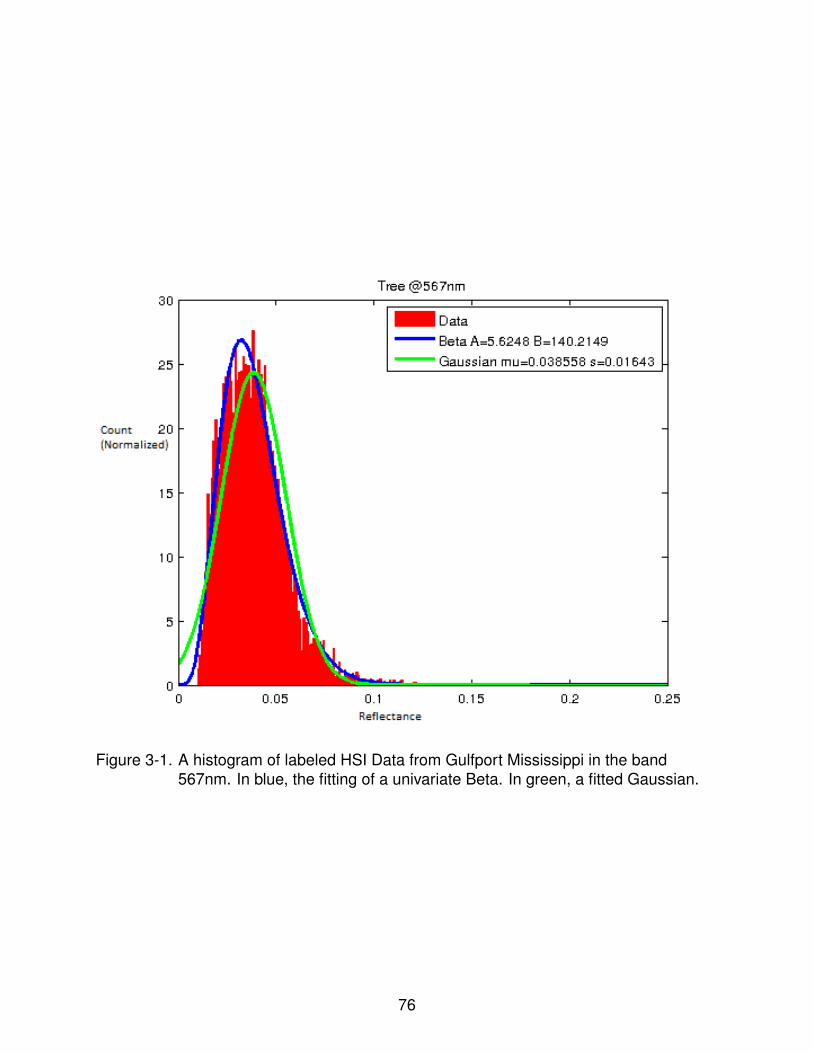
Figure 3-1. A histogram of labeled HSI Data from Gulfport Mississippi in the band567nm. In blue, the fitting of a univariate Beta. In green, a fitted Gaussian.
76

Figure 3-2. Plot of the independence copula in 2 Dimensions.
77

Figure 3-3. Plot of the Gaussian Copula in 2 Dimensions. With Σ =(1 0.30.3 1
)
78
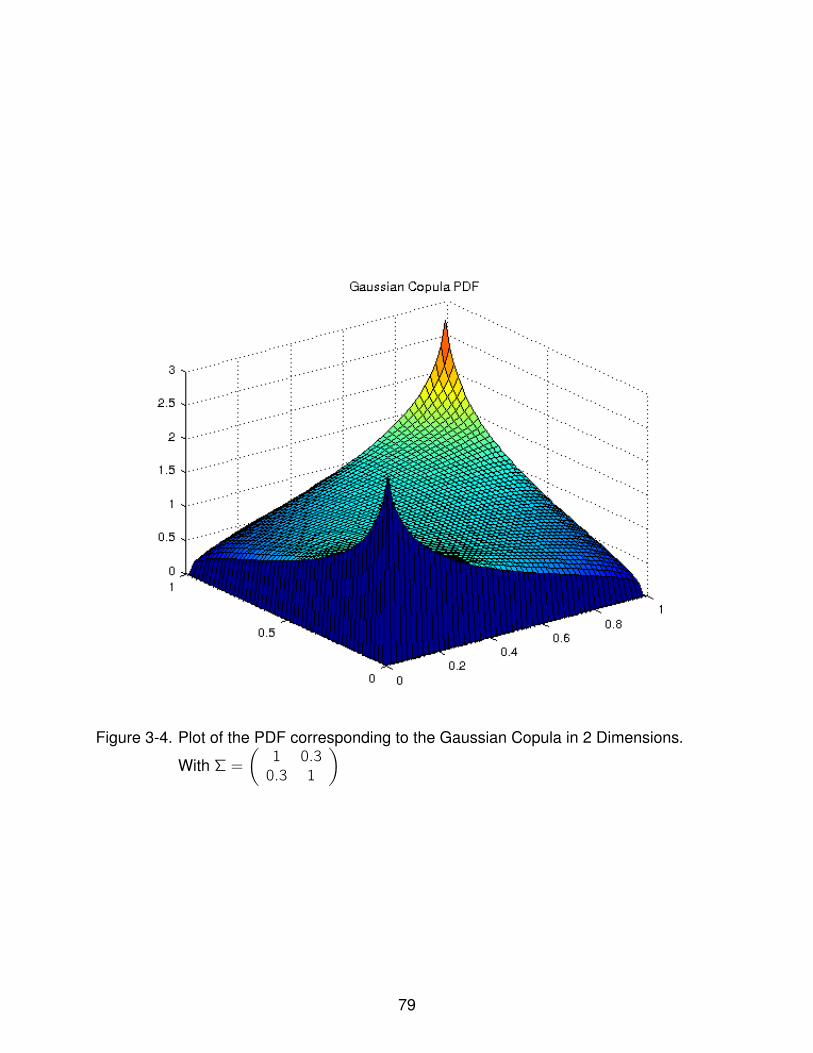
Figure 3-4. Plot of the PDF corresponding to the Gaussian Copula in 2 Dimensions.
With Σ =(1 0.30.3 1
)
79

CHAPTER 4RESULTS
After implementation of the unmixing approaches in the previous sections we ran
many different experiments in order to determine the efficacy of the BCM and CBCM,
the results of which appear in this chapter.
Broadly speaking we validate the models and unmixing algorithms used in two
ways, first using synthetic generated datasets and second using an AVIRIS dataset
collected over Gulfport Mississippi in 2010[66].
4.1 Synthetically Generated Data
Using real endmember distributions from hand-labeled remotely sensed data taken
over Gulfport Mississippi [66] we synthetically generated a dataset of 10,000 pixels.
Endmember distributions for Dirt (Fig. 4-2), Tree (Fig. 4-3), and Asphalt (Fig. 4-1) in
63 bands were selected and beta distributions were fit to them, generating a set of
parameters ~α, ~β.
These parameters ~α, ~β were then used, for every pixel, to sample an endmember
from each endmember distribution.
ek ∼ B(~αk , ~βk) for k ∈ {1, ...,M}. (4–1)
Then, combining this with a proportion vector sampled from a standard Dirichlet
distribution
pi ∼ Dir(1) (4–2)
Each pixel was generated as a dot product of endmembers and proportions
xi :=
M∑k=1
pi ,k ek (4–3)
80

and the dataset is simply given by X = {x1, ..., x10000}. Figure 4-4 shows a
visualization of 100 spectra in this dataset.
4.1.1 Unmixing Proportions
Unmixing solely the proportions was accomplished through BBCM (Section
3.4.4), with the mean and sample size estimation step omitted, in other words, a single
Metropolis-Hastings sampler.
The sampling itself was accomplished with 10000 iterations, with 1000 burn-in
iterations, and a sample was taken from every 10-th iteration to ensure independent
sampling : yielding 1000 total samples. The results of unmixing for this experiment were
measured through L1 error of the estimated proportions and the MAP of the resulting
sampled proportions, which was estimated by taking the mean of the samples. Fitting
a normal distribution and taking a MAP estimate at the mode proved to be statistically
insignificant in terms of error difference.
Results can be seen in Table 4-1, comparison with the NCM, LMM, and [75] on this
same dataset is also given. The implementation of NCM used had diagonal covariance
matrices and is described in more detail in Section 4.3.4, The parameters for these
distributions were set such that the first two moments of all endmember distributions
were the same in all models.
This result represents an error of, on average, 3.7% for proportions estimated
for the model. The likelihood of the MAP estimate was within 0.03 % of the likelihood
of the truth, indicating that the error in the model is solely due to the high variance of
the endmember distributions. Indeed the error is highest for Dirt and Asphalt, whose
distributions have similar shape (Figures 4-2,4-1).
The error for the uniform proposal distribution (Eqn. 3–35) is identical up to the
precision used, however convergence of the MCMC sampler to within 1% of the
maximum likelihood required 20% less iterations. Therefore this proposal distribution
was used for all future experiments with BBCM.
81

Comparing the results of BCM with the results of other state of the art unmixing
methods, it is clear that the BCM performs better at unmixing overall, performing 5−10%
better than the NCM. Though the NCM does surprisingly well on data which is not
normally distributed. Note that BBCM performs overwhelmingly better than the first
method developed to unmix the BCM in [75], also shown in the table, which was not
designed to work well with highly mixed data.
4.1.2 Endmember Distribution Estimation
Determining the endmember distributions with known proportions on the synthetic
dataset described above was accomplished through BBCM 3.4.4, with the proportion
estimation step substituted with the true proportions for every sample. This effectively
turns BBCM from a 3-stage Gibbs sampler into a 2-stage Gibbs sampler.
The sampling itself was accomplished with 1000 iterations of the global Gibbs
sampler and 100 burn in iterations, with a sample was taken from every 5-th iteration to
avoid dependency in sampling : yielding 200 total samples. Within each Metropolis-Hastings
step, for the mean a burn-in of 200 iterations was used per sample, and for the sample
size a burn-in of 100 iterations was used.
The results of unmixing for this experiment were measured through L1 error of
the estimated means and the true means of the three endmember distributions. Also,
relative L1 error was used between the estimated and true sample sizes to determine
the accuracy of the estimation. Results appear in Table 4-2.
BBCM was able to effectively estimate the endmember distributions, given the
known proportions, with virtually no error in estimating the mean, and an average
relative error of roughly 3% when estimating the sample size, again the likelihood of the
MAP estimate was within 0.1% of the truth likelihood, so this error is again due to the
variance of the distributions.
82

4.1.3 Full Unmixing
The two previous experiments serve as a baseline for the accuracy of the full
BBCM method. With this in mind, The full BBCM was tested on the synthetic dataset
introduced above. The sampling itself was accomplished with 1000 iterations of the
global Gibbs sampler and 100 burn in iterations, with a sample was taken from every
5-th iteration to avoid dependency in sampling : yielding 200 total samples. Within each
Metropolis-Hastings step, for the mean a burn-in of 200 iterations was used per sample,
and for the sample size a burn-in of 100 iterations was used, and for the proportions a
burn-in of 100 iterations was used per sample.
The results of unmixing for this experiment were measured through L1 error of the
estimated means and the true means of the three endmember distributions, relative L1
error between the estimated and true sample sizes, and absolute L1 error between the
estimated and true proportions for each endmember. Results appear in Table 4-3.
The true and estimated means appear in Figure 4-8 and the true and estimated
sample sizes in Figure 4-9. The algorithm derived in this research was able to fully
unmix the Beta Compositional Model with minimal error on this synthetic dataset.
Indeed, the error in the mean is less than 1% reflectance, and the error in proportion
is about 4%, not far from the baseline 3% from previous experiments with fixed
endmember distributions. Furthermore, the MAP estimate, that is to say the estimated
full set of parameters ~µ, ~SS,P, had a likelihood that was 0.5% greater than the likelihood
of the true parameters. This indicates strongly that the errors in this experiment are not
due to the algorithm, but due to the inherent variance of the endmember distributions.
4.2 Experiments with the Gulfport Dataset
Using an AVIRIS dataset collected over Gulfport Mississippi in 2010[66] with
co-registered ground measurements corresponding to endmember distributions, a
91 × 126 sub-image of the campus area was selected which is shown in Figure 4-10.
83

This area has a large area of tree cover, a large building with a very visible grey roof,
several paved roadways and a parking lot, and small localized areas with grass and dirt.
Two types of ground truth are available on this dataset, with varying degrees of
accuracy. First, a set of measurements were collected on the ground with a hand-held
device, for 32 different classes, ranging from 5 to 50 measurements per spectral group.
Second, a hand labeling of a superset of this dataset, shown in Figure 4-11, was done,
where regions of pure or nearly-pure pixels were identified within the scene using the
remotely sensed data, Google Earth, and photos taken at the dataset collection itself, for
guidance [66]. This ground truth is less accurate, but there is an abundance of it : a total
of 8 classes with over 1000 pixels per class.
In order to evaluate the effectiveness of BBCM at fully unmixing the endmember
distributions, we compare the ground collected truth to the distributions generated
by BBCM by firstly, labeling each endmember distribution by taking the mean and
identifying the category in which the closest ground-collected spectra (by L1 norm)
resides. Qualitative comparison can then be done by comparing each associated
proportion map with the hand-labeled truth.
For the second group of hand-labeled airborne truth, we evaluate the result by
comparing the labeled proportion maps with proportion maps (generated by labeling the
image by the maximum proportion of each distribution) estimated by BBCM.
We proceeded to unmix this area fully using BBCM with 5 endmembers, 3000
burn-in iterations and 6000 total iterations with a sample taken from every 5-th iteration,
yielding 600 samples. Resulting endmember distribution means with closest ground
spectra in Figure 4-12, with the distributions themselves in Figure 4-14, and proportion
maps labeled by matching closest ground spectra are shown in Figure 4-13. The
labelings themselves and associated error are given in Table 4-4.
84

4.2.1 Comparison with NCM
We also ran an NCM unmixing algorithm, as implemented by Eches et. al. [10]
with MATLAB code provided. Comparison with the BBCM is difficult, however, as there
is as of the moment of this writing, no full Bayesian unmixing algorithm for the NCM.
Ineed, Eches et al. do not estimate the endmember means for the NCM, and assume
covariance is diagonal and scalar and the same for each endmember distribution. We
use the means generated by BCM as fixed parameters to the NCM unmixing algorithm
[10].
We unmixed this same area of Gulfport fully with this method, using 3000 burn-in
iterations and 6000 total iterations with again a sample taken from every 5-th iteration,
yielding 600 samples. We compare this NCM unmixing method to BBCM in terms of
generated endmember distributions and proportion maps.
Concerning endmember distributions observe the generated tree distributions,
Figures 4-15, 4-16, and the corresponding ground truth in Figure 4-17, as well as
hand labeled truth in Figure 4-3. The BBCM is more accurately able to estimate the
shape of the true endmember distribution than the NCM, with an average band-wise KL
divergence of 3.51 from the truth (compared to 26.83 for the NCM). This is indicative
of BBCMs ability in general to provide a better estimate of the variance compared to
this implementation of the NCM. Indeed, a scalar covariance (as implemented in [10])
appears to be insufficient to describe most endmember distributions.
4.3 BCBCM Experiments
To empirically validate the CBCM model, experiments were performed on two
different types of datasets. First, a purely synthetic dataset, and finally a dataset
consisting of a mixture of real endmember distributions. Quantitative comparisons with
NCM and LMM models are available for each experiment and analyzed in detail. Before
this is done, the method in section 3.5.2 is described in detail and empirically verified, as
it is vital to the efficacy of this model.
85

4.3.1 Covariance Mapping
An interpolation based approximation to the mapping given in the preceding
chapter, given below, is constructed for the Gaussian Copula as follows.
FS(σ) := Covσ(b1,b2) ∗1√V1V2
(4–4)
S := {Params(b1),Params(b2)} (4–5)
First we select a set of parameters for each of the marginals, 50 uniformly spaced
means µ1,µ2 ∈ [0, 1], and 50 non-uniformly placed sample sizes. ss1, ss2 ∈ (1,∞).
Recall that the beta distribution can be parametrized in this way, in terms of mean and
sample size.
Note that it can be shown that ss1, ss2 →∞, F1,2(σ)→ σ.
For each distinct set of marginal parameters S = {ss1, ss2,µ1,µ2}, of which there
were 6.2 million, we calculated the sample covariance for two cases, σ = 1 and σ = 0.5
using 200,000 samples from a bivariate Gaussian copula with this σ. Note that, by
independence, FS(0) = 0.
Calculating FS(1),FS(0.5) for each S , the mappings ˆF (1) and F (0.5) are estimated
by two 4-D linear interpolation over all possible marginal parameters S (with the aid of
MATLAB software).
Then F is estimated in its entirety by fitting a quadratic polynomial in σ.
FS(σ) = aσ2 + bσ (4–6)
a := −4F (0.5) + 2F (1) (4–7)
b := 4F (0.5)− 1F (1) (4–8)
Where a, b are calculated from ˆF (1), F (0.5) by solving a linear system. A linear and
piecewise linear fit was also explored, but found to perform worse in terms of accuracy,
86

although slightly faster in terms of unmixing speed. A depiction of this mapping, as well
as various different fittings for a given S is shown in Figure 4-6. This quadratic/linear
approximation of F was used for all subsequent experiments.
4.3.2 Synthetic Dataset
Using beta endmember distributions fitted to hand-labeled remotely sensed data
taken over Gulfport Mississippi [66] we synthetically generated a dataset of 10,000
pixels. Endmember distributions for Dirt (Fig. 4-2), Tree (Fig. 4-3), and Asphalt (Fig. 4-1)
in 63 bands were selected and beta distributions were fit to them, generating a set of
parameters ~α, ~β,Cm, similarly as in the dataset described in Section 4.1.
Some extra detail is necessary here, as while it is simple to fit univariate distributions
to each band, it is more involved to fit a multivariate distribution with given marginals and
copula. The way we approached this problem is by first fitting marginal distributions
to the first and second moments of the data. Then, the mapping determined in the
preceding section was used to determine the parameters of the Gaussian copula Cm for
each pair of marginals.
Once generated, these parameters ~α, ~β,Ck were then used, for every pixel, to
sample an endmember from each endmember distribution.
ek ∼ B(~αk , ~βk ,Ck) for k ∈ {1, ...,M}. (4–9)
Then, as in the independence case, combining this with a proportion vector sampled
from a standard Dirichlet distribution
pi ∼ Dir(1) (4–10)
Each pixel was generated as a dot product of endmembers and proportions
87

xi :=
M∑k=1
pi ,k ek (4–11)
and the dataset is simply given by X = {x1, ..., x10000}. Figure 4-5 shows a
visualization of 100 spectra in this dataset, note the difference with Figure 4-4.
4.3.3 Mixture of True Distributions
A hybrid dataset consisting of real data from endmember distributions collected
in Gulfport Mississippi [66] was also created. The idea behind such a dataset was to
assess the performance of the model (compared to other state of the art models), on
data which mixes real endmember distributions, but still has an accurate form of ground
truth.
Indeed, this dataset is similar to the one described in the preceding section,
however, crucially, when sampling an endmember from each endmember distribution,
we sampled from the true histogram of all endmembers in the distribution, of which there
were 5000− 10000 depending on the distribution.
ek ∼ Histk for k ∈ {1, ...,M}. (4–12)
To get a grasp on the goodness of fit between Histk and the multivariate beta, the
KL divergence between the histograms for the marginals of these three endmember
distributions was calculated and can be seen in figure 4-7.
The mixture proportions were generated synthetically, using a standard Dirichlet as
in the previous dataset,
pi ∼ Dir(1) (4–13)
88

Yielding an accurate form of ground truth. The motivation for the creation of this
hybrid dataset was to compare the NCM and BCM on a mixture of true endmember
distributions that were collected from real data. Comparison is possible, in this case,
because the true proportions are known. We refer to this dataset as the ”True Mixture”
dataset, denoted XT .
4.3.4 Comparison with NCM, LMM, and BCM
Both datasets were unmixed with five different state of the art methods. First,
the standard linear mixing model, Second, a method of unmixing with the Normal
Compositional Model with full and diagonal covariance matrices. No such method
exists in the literature, but simple implementation changes to BCBCM were made to
accommodate such a method, (simply by replacing the covariance mapping with the
identity, and swapping the marginals to normals). Third, the proportion unmixing part
of BBCM method in the previous chapter was also run, for comparison. And finally,
BCBCM was also run.
For the NCM, BCM, and BCBCM methods, a Metropolis Hastings algorithm was
used described earlier in the preceding sections. A uniform prior and a uniform proposal
distribution was used for all methods.
For consistency all methods were given the same number of iterations 10000 with
samples taken from every 30th iteration. The MAP estimate, PE , of the proportions for
each method was taken as the mean of the histogram of samples.
Efficacy of each method was compared via the following L1-based measure for
endmember distribution k , where PT denotes the true proportions, and PE denotes the
estimated proportion.
ERRk :=1
N
N∑i=1
|PEi ,k − PTi ,k | (4–14)
89

These results were also combined to determine a global error measure for the
whole dataset.
ERR :=1
NM
M∑k=1
N∑i=1
|PEi ,k − PTi ,k | (4–15)
In other words, the average of the errors for each endmember distribution. Recall
that N = 10000 and M = 3 for both datasets in question. Results for the first synthetic
dataset appear in Table 4-5.
Predictably, the CBCM model is superior and outperforms all other methods. If data
is really distributed as multivariate beta distributions, BCBCM outperforms state of the
art by as much as 10%.
Note the high error in the LMM as well, this is strong evidence that the fixed-spectra
endmember assumption is not valid if the data is indeed distributed as a convex sum of
random variables.
A more interesting result from unmixing of the true mixture dataset appears in Table
4-6. Note again the high error in the LMM, even higher than in the previous dataset.
However, despite the fact that, as can be seen in Figure 4-7, the marginals are a better
fit, the CBCM model does no better than the NCM. There are two plausible explanations
for this.
In the NCM, a Gaussian copula is implicit, as the marginals are Gaussian, no
approximation is necessary. However in the CBCM we approximate this dependence
with a Gaussian Copula, which we in turn also approximate through a mapping. The
mapping was found to have an absolute maximum error of 0.02 for any σ, and an
average estimation error of 0.002 for a random sampling of 1000 pixels. Yet, because
the likelihood is dominated by the dependence term, the marginals play less of a role,
and our approximation error is magnified, no such approximation error is inherent in the
NCM.
90

It is tempting to attribute this error to approximation, yet, puzzlingly, the error
observed on the second dataset does not occur on the truly synthetic dataset generated
from multivariate beta distributions. Indeed the result on both of these datasets is strong
evidence that while marginally beta distributions fit hyperspectral data better than normal
distributions (Figure 4-7), multivariate beta distributions do not fit hyperspectral data any
better than multivariate normal distributions, if the copula used is Gaussian.
We conclude that CBCM accurately fits mixtures of real endmember distributions
in hyperspectral data, effectively just as well as the NCM. However the increased
complexity of the model and increased time complexity over NCM is enough to favor use
of the NCM rather than the CBCM for unmixing real hyperspectral data (Table 4-6), if
endmember distribution dependency information is available. If such information is not
available, then experiments in the preceding section indicate ordinary BCM is superior to
NCM for unmixing.
300 400 500 600 700 800 900 1000 11000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Asphalt
Wavelength
Ref
lect
ance
Figure 4-1. A distribution of spectra for pixels that contain purely or near purely asphalt,taken from Gulfport, Mississippi.
91

300 400 500 600 700 800 900 1000 11000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Dirt
Wavelength
Ref
lect
ance
Figure 4-2. A distribution of spectra for pixels that contain purely or near purely dirt,taken from Gulfport, Mississippi.
300 400 500 600 700 800 900 1000 11000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Tree
Wavelength
Ref
lect
ance
Figure 4-3. A distribution of spectra for pixels that contain purely or near purely tree,taken from Gulfport, Mississippi.
92

300 400 500 600 700 800 900 10000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Synthetic Dataset
Wavelength
Ref
lect
ance
Figure 4-4. 100 Spectra taken from the Synthetic Dataset
400 500 600 700 800 900 10000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Wavelength (nm)
Ref
lect
ance
Synthetic Dataset
Figure 4-5. 100 Spectra taken from a Copula-Based Synthetic Dataset
93

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.018
−0.016
−0.014
−0.012
−0.01
−0.008
−0.006
−0.004
−0.002
0
Sigma
F(S
igm
a) −
Sig
ma
Copula to Covariance Mapping for Two Beta Distributions
SamplesPolynomial FitLinear Fit
Figure 4-6. Approximating a mapping between Covariance and Copula Correlation.
1,000,000 Samples were used to estimate F(Sigma) at each point.
Table 4-1. Proportion Unmixing Errors for BCM with a Mean-based ProposalDistribution. Comparison with NCM, LMM, and the BCM unmixing method in[75] (Old BCM) on the same data.
Model Tree Asphalt Dirt AverageBCM 0.024 0.042 0.044 0.037NCM 0.026 0.045 0.046 0.039LMM 0.031 0.068 0.065 0.055
Old BCM 0.075 0.089 0.090 0.085
Table 4-2. L1 Error in mean Estimation (Absolute) and L1 Error in Sample size (Relative)Tree Dirt Asphalt
Error in Mean 0.0008 0.0006 0.0009Error in Sample Size 0.0429 0.0317 0.0237
94

Table 4-3. A table showing error values between the MAP estimate and the ground truth.Tree Dirt Asphalt Average
Error in Mean 0.0032 0.0039 0.0044 0.0038Error in Sample Size 0.0756 0.0305 0.0926 0.0662
Error in Proportion 0.0280 0.0471 0.0499 0.0417
Table 4-4. A table showing labelings for the mean and associated distance to truth(average L1 error in each band).
BCM Label L1 DistanceOak Tree (Friendship Oak) 0.0253
Shadow 0.0270Dried Leaves 0.0206
Asphalt 0.0553Sidewalk 0.0311
Table 4-5. A table showing error values between the MAP estimate and the ground truthfor different models on a synthetic dataset. NCM-d is NCM with a diagonalcovariance.
Model Tree Dirt Asphalt Average Seconds / SampleLMM 0.1151 0.2496 0.2138 0.1928 0.00
NCM-d 0.1163 0.1830 0.1329 0.1441 1.78BCM 0.1158 0.1782 0.1300 0.1413 6.51NCM 0.0339 0.0616 0.0658 0.0538 81.91
CBCM 0.0330 0.0517 0.0563 0.0470 222.30
Table 4-6. A table showing error values between the MAP estimate and the ground truthfor different models on a dataset with mixtures of true endmemberdistributions.Tree Dirt Asphalt Average Seconds / Sample
LMM 0.1170 0.2532 0.2163 0.1955 0.00NCM-d 0.1168 0.1819 0.1282 0.1423 1.43
BCM 0.1169 0.1769 0.1257 0.1398 6.79NCM 0.0301 0.0601 0.0633 0.0511 80.97
CBCM 0.0331 0.0594 0.0650 0.0525 220.11
95

A Tree
B Dirt
C Asphalt
Figure 4-7. In Blue is the KL Divergence of the Beta Distribution Fit for each Band. InGreen the same information for the Gaussian. The Beta is a clear better fitfor Tree and Asphalt.
96

400 500 600 700 800 900 10000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Wavelength
Mea
n
Mean of Endmember Distributions (Estimated vs True)
ED Tree estimatedED Asphalt estimatedED Dirt estimatedED Tree trueED Asphalt trueED Dirt true
Figure 4-8. Estimated and True Mean values of the Endmember Distributions withSynthetic Data
400 500 600 700 800 900 10000
100
200
300
400
500
600
700
800
900
Wavelength
Sam
ple
Siz
e
Sample Size of Endmember Distributions (Estimated vs True)
Tree estimatedAsphalt estimatedDirt estimatedTree trueAsphalt trueDirt true
Figure 4-9. Estimated and True Sample Size of the Endmember Distributions withSynthetic Data
97

Gulfport Mississippi
20 40 60 80 100 120
10
20
30
40
50
60
70
80
90
Figure 4-10. A part of the campus area in the Gulfport Mississippi dataset.
20 40 60 80 100 120
180
200
220
240
260
280
Figure 4-11. A class partition used to evaluate the efficacy of resulting proportion maps.
98

500 600 700 800 900 10000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Wavelength
Endmembers and Closest Ground Spectra L2 Norm, AVG ERR=0.10667
FriendshipOak : ERR=0.070248Shadow : ERR=0.052288DriedLeaves : ERR=0.057737AsphaltBeachParkingLot : ERR=0.2721SidewalkInShade : ERR=0.080968
Figure 4-12. Means of endmember distributions computed by BBCM.
99

FriendshipOak
20 40 60 80 100 120
20
40
60
80
Shadow
20 40 60 80 100 120
20
40
60
80
DriedLeaves
20 40 60 80 100 120
20
40
60
80
AsphaltBeachParkingLot
20 40 60 80 100 120
20
40
60
80
SidewalkInShade
20 40 60 80 100 120
20
40
60
80
Figure 4-13. Proportions computed by BBCM.
100
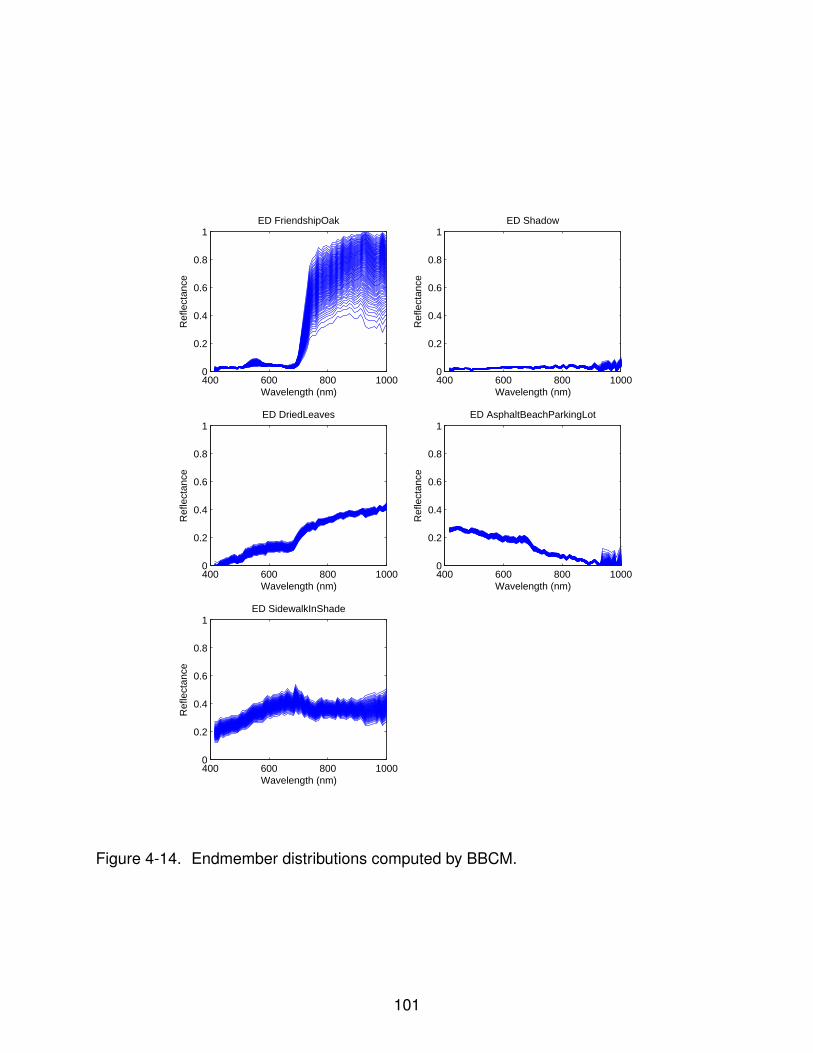
400 600 800 10000
0.2
0.4
0.6
0.8
1
Wavelength (nm)
ED FriendshipOak
Ref
lect
ance
400 600 800 10000
0.2
0.4
0.6
0.8
1
Wavelength (nm)
ED Shadow
Ref
lect
ance
400 600 800 10000
0.2
0.4
0.6
0.8
1
Wavelength (nm)
ED DriedLeaves
Ref
lect
ance
400 600 800 10000
0.2
0.4
0.6
0.8
1
Wavelength (nm)
ED AsphaltBeachParkingLotR
efle
ctan
ce
400 600 800 10000
0.2
0.4
0.6
0.8
1
Wavelength (nm)
ED SidewalkInShade
Ref
lect
ance
Figure 4-14. Endmember distributions computed by BBCM.
101

400 500 600 700 800 900 1000 11000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1ED FriendshipOak : Uniform Sampling
Figure 4-15. The tree distribution as estimated by BBCM.
400 500 600 700 800 900 10000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Wavelength (nm)
ED FriendshipOak
Ref
lect
ance
Figure 4-16. The tree distribution as estimated with NCM.
102

0 100 200 300 400 500 600 700 8000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1FriendshipOak
Figure 4-17. A Tree Distribution from the Ground-collected Truth in the Gulfport Data.
103

CHAPTER 5CONCLUSION
The introduced Beta Compositional (BCM, CBCM) family of models addresses
major issues present in the current state of the art approach to endmember distribution
estimation, the Normal Compositional Model (NCM). In particular, the CBCM’s support
is physically valid in the domain of reflectance, band-wise dependency of endmember
can be represented, and the shape of the beta distribution provides, marginally, a better
reflection of the observed asymmetry than the Gaussian.
Furthermore, two novel, Bayesian, endmember distribution estimation algorithms
are derived, implemented, and tested for this family of models. These algorithms are
based heavily on Markov-Chain Monte Carlo methods, but this approach parallels, in
some sense, existing algorithms for unmixing the NCM.
The development of one of these algorithms, BCBCM, led to a novel theoretical
result relating copula to covariance, and as a result a general method to modeling sums
of copula-based random variables was discovered, with potential applications even
outside the field of hyperspectral. On the other hand, the development of BBCM showed
that a fully Bayesian unmixing approach for a distribution based hyperspectral model
is feasible. Such an approach proved effective at estimating endmember variability,
more-so than existing NCM unmixing methods.
We conclude that the Beta Compositional Family of models plus derived Bayesian
unmixing methods are not only an improvement upon state of the art, but also a step
forward in the field of hyperspectal, paving the way for other distribution-based models of
endmember spectral variability that follow a similar approach.
104
REFERENCES
[1] J. Bioucas-Dias, A. Plaza, N. Dobigeon, M. Parente, Q. Du, P. Gader, andJ. Chanussot, “Hyperspectral unmixing overview: Geometrical, statistical, andsparse regression-based approaches,” Selected Topics in Applied Earth Observa-tions and Remote Sensing, IEEE Journal of, vol. 5, no. 2, pp. 354–379, 2012.
[2] N. Keshava and J. Mustard, “Spectral unmixing,” Signal Processing Magazine,IEEE, vol. 19, no. 1, pp. 44–57, 2002.
[3] R. Close, “Endmember and proportion estimation using physics-based macroscopicand microscopic mixture models,” Ph.D. dissertation, UNIVERSITY OF FLORIDA,2012.
[4] D. Stein, “Application of the normal compositional model to the analysis ofhyperspectral imagery,” in Advances in Techniques for Analysis of RemotelySensed Data, 2003 IEEE Workshop on. IEEE, 2003, pp. 44–51.
[5] B. Somers, G. P. Asner, L. Tits, and P. Coppin, “Endmember variability in spectralmixture analysis: A review,” Remote Sensing of Environment, vol. 115, no. 7, pp.1603–1616, 2011.
[6] A. Zare and P. Gader, “An investigation of likelihoods and priors for bayesianendmember estimation,” in AIP Conference Proceedings, vol. 1305, 2011, p. 311.
[7] T. Schmidt, “Coping with copulas,” Chapter forthcoming in Risk Books: Copulas,from theory to applications in finance, 2006.
[8] C. Bishop et al., Pattern recognition and machine learning. springer New York,2006, vol. 4, no. 4.
[9] F. Schmidt, A. Schmidt, E. Treguier, M. Guiheneuf, S. Moussaoui, and N. Dobigeon,“Implementation strategies for hyperspectral unmixing using bayesian sourceseparation,” Geoscience and Remote Sensing, IEEE Transactions on, vol. 48,no. 11, pp. 4003–4013, 2010.
[10] O. Eches, N. Dobigeon, C. Mailhes, and J. Tourneret, “Bayesian estimation oflinear mixtures using the normal compositional model. application to hyperspectralimagery,” Image Processing, IEEE Transactions on, vol. 19, no. 6, pp. 1403–1413,2010.
[11] M. Berman, H. Kiiveri, R. Lagerstrom, A. Ernst, R. Dunne, and J. Huntington,“Ice: A statistical approach to identifying endmembers in hyperspectral images,”Geoscience and Remote Sensing, IEEE Transactions on, vol. 42, no. 10, pp.2085–2095, 2004.
[12] J. Boardman, F. Kruse, and R. Green, “Mapping target signatures via partialunmixing of aviris data,” 1995.
105

[13] J. Boardman et al., “Automating spectral unmixing of aviris data using convexgeometry concepts,” in Summaries 4th Annu. JPL Airborne Geoscience Workshop,vol. 1. JPL Publication 93–26, 1993, pp. 11–14.
[14] A. Green, M. Berman, P. Switzer, and M. Craig, “A transformation for orderingmultispectral data in terms of image quality with implications for noise removal,”Geoscience and Remote Sensing, IEEE Transactions on, vol. 26, no. 1, pp. 65–74,1988.
[15] M. Winter, “N-findr: an algorithm for fast autonomous spectral end-memberdetermination in hyperspectral data,” in SPIE’s International Symposium on OpticalScience, Engineering, and Instrumentation. International Society for Optics andPhotonics, 1999, pp. 266–275.
[16] J. Lee, A. Woodyatt, and M. Berman, “Enhancement of high spectral resolutionremote-sensing data by a noise-adjusted principal components transform,” Geo-science and Remote Sensing, IEEE Transactions on, vol. 28, no. 3, pp. 295–304,1990.
[17] J. Nascimento and J. Dias, “Vertex component analysis: A fast algorithm to unmixhyperspectral data,” Geoscience and Remote Sensing, IEEE Transactions on,vol. 43, no. 4, pp. 898–910, 2005.
[18] R. Neville, K. Staenz, T. Szeredi, J. Lefebvre, and P. Hauff, “Automatic endmemberextraction from hyperspectral data for mineral exploration,” in Proc. 21st CanadianSymp. Remote Sens, 1999, pp. 21–24.
[19] J. Gruninger, A. Ratkowski, and M. Hoke, “The sequential maximum angle convexcone(smacc) endmember model,” in Proceedings of SPIE, vol. 5425, 2004, pp.1–14.
[20] C. Chang, C. Wu, W. Liu, and Y. Ouyang, “A new growing method for simplex-basedendmember extraction algorithm,” Geoscience and Remote Sensing, IEEE Transac-tions on, vol. 44, no. 10, pp. 2804–2819, 2006.
[21] T. Chan, W. Ma, A. Ambikapathi, and C. Chi, “A simplex volume maximizationframework for hyperspectral endmember extraction,” Geoscience and RemoteSensing, IEEE Transactions on, vol. 49, no. 11, pp. 4177–4193, 2011.
[22] C. Wu, S. Chu, and C. Chang, “Sequential n-findr algorithms,” in Optical Engi-neering+ Applications. International Society for Optics and Photonics, 2008, pp.70 860C–70 860C.
[23] L. Miao and H. Qi, “Endmember extraction from highly mixed data using minimumvolume constrained nonnegative matrix factorization,” Geoscience and RemoteSensing, IEEE Transactions on, vol. 45, no. 3, pp. 765–777, 2007.
106

[24] D. Lee, H. Seung et al., “Learning the parts of objects by non-negative matrixfactorization,” Nature, vol. 401, no. 6755, pp. 788–791, 1999.
[25] M. Arngren, M. Schmidt, and J. Larsen, “Bayesian nonnegative matrix factorizationwith volume prior for unmixing of hyperspectral images,” in Machine Learning forSignal Processing, 2009. MLSP 2009. IEEE International Workshop on. IEEE,2009, pp. 1–6.
[26] A. Zare and P. Gader, “Sparsity promoting iterated constrained endmemberdetection in hyperspectral imagery,” Geoscience and Remote Sensing Letters,IEEE, vol. 4, no. 3, pp. 446–450, 2007.
[27] J. Bioucas-Dias, “A variable splitting augmented lagrangian approach to linearspectral unmixing,” in Hyperspectral Image and Signal Processing: Evolution inRemote Sensing, 2009. WHISPERS’09. First Workshop on. IEEE, 2009, pp. 1–4.
[28] J. Li and J. Bioucas-Dias, “Minimum volume simplex analysis: a fast algorithm tounmix hyperspectral data,” in Geoscience and Remote Sensing Symposium, 2008.IGARSS 2008. IEEE International, vol. 3. IEEE, 2008, pp. III–250.
[29] T. Chan, C. Chi, Y. Huang, and W. Ma, “A convex analysis-based minimum-volumeenclosing simplex algorithm for hyperspectral unmixing,” Signal Processing, IEEETransactions on, vol. 57, no. 11, pp. 4418–4432, 2009.
[30] G. Box and G. Tiao, “Bayesian inference in statistical analysis,” DTIC Document,Tech. Rep., 1973.
[31] A. Zare and P. Gader, “Pce: Piecewise convex endmember detection,” Geoscienceand Remote Sensing, IEEE Transactions on, vol. 48, no. 6, pp. 2620–2632, 2010.
[32] N. Dobigeon, S. Moussaoui, J. Tourneret, and C. Carteret, “Bayesian separationof spectral sources under non-negativity and full additivity constraints,” SignalProcessing, vol. 89, no. 12, pp. 2657–2669, 2009.
[33] S. Moussaoui, C. Carteret, D. Brie, and A. Mohammad-Djafari, “Bayesian analysisof spectral mixture data using markov chain monte carlo methods,” Chemometricsand intelligent laboratory systems, vol. 81, no. 2, pp. 137–148, 2006.
[34] A. Mohammad-Djafari, “A bayesian approach to source separation,” arXiv preprintmath-ph/0008025, 2000.
[35] O. Eches, N. Dobigeon, C. Mailhes, and J. Tourneret, “Unmixing hyperspectralimages using a normal compositional model and mcmc methods,” in StatisticalSignal Processing, 2009. SSP’09. IEEE/SP 15th Workshop on. IEEE, 2009, pp.646–649.
[36] C. Robert, G. Casella, and C. Robert, Monte Carlo statistical methods. SpringerNew York, 1999, vol. 2.
107

[37] Q. Shao and J. Ibrahim, Monte Carlo methods in Bayesian computation. SpringerSeries in Statistics, New York, 2000.
[38] S. Chib and E. Greenberg, “Understanding the metropolis-hastings algorithm,” TheAmerican Statistician, vol. 49, no. 4, pp. 327–335, 1995.
[39] G. Casella and E. George, “Explaining the gibbs sampler,” The American Statisti-cian, vol. 46, no. 3, pp. 167–174, 1992.
[40] W. Gilks, N. Best, and K. Tan, “Adaptive rejection metropolis sampling within gibbssampling,” Applied Statistics, pp. 455–472, 1995.
[41] J. Nascimento and J. Bioucas-Dias, “Hyperspectral unmixing algorithm viadependent component analysis,” in Geoscience and Remote Sensing Sympo-sium, 2007. IGARSS 2007. IEEE International. IEEE, 2007, pp. 4033–4036.
[42] P. Comon, “Independent component analysis, a new concept?” Signal processing,vol. 36, no. 3, pp. 287–314, 1994.
[43] J. Nascimento and J. Dias, “Does independent component analysis play a role inunmixing hyperspectral data?” Geoscience and Remote Sensing, IEEE Transac-tions on, vol. 43, no. 1, pp. 175–187, 2005.
[44] J. Nascimento and J. Bioucas-Dias, “Hyperspectral unmixing based on mixturesof dirichlet components,” Geoscience and Remote Sensing, IEEE Transactions on,vol. 50, no. 3, pp. 863–878, 2012.
[45] J. Bioucas-Dias and J. Nascimento, “Hyperspectral subspace identification,”Geoscience and Remote Sensing, IEEE Transactions on, vol. 46, no. 8, pp.2435–2445, 2008.
[46] J. Diebolt and G. Celeux, “Asymptotic properties of a stochastic em algorithm forestimating mixing proportions,” Stochastic Models, vol. 9, no. 4, pp. 599–613, 1993.
[47] K. Knuth, “Bayesian source separation and localization,” in SPIE’s InternationalSymposium on Optical Science, Engineering, and Instrumentation. InternationalSociety for Optics and Photonics, 1998, pp. 147–158.
[48] D. Rowe, Multivariate Bayesian statistics: models for source separation and signalunmixing. Chapman & Hall/CRC, 2002.
[49] N. Dobigeon, S. Moussaoui, M. Coulon, J. Tourneret, and A. Hero, “Joint bayesianendmember extraction and linear unmixing for hyperspectral imagery,” SignalProcessing, IEEE Transactions on, vol. 57, no. 11, pp. 4355–4368, 2009.
[50] S. Moussaoui, D. Brie, A. Mohammad-Djafari, and C. Carteret, “Separation ofnon-negative mixture of non-negative sources using a bayesian approach andmcmc sampling,” Signal Processing, IEEE Transactions on, vol. 54, no. 11, pp.4133–4145, 2006.
108

[51] S. Moussaoui, H. Hauksdottir, F. Schmidt, C. Jutten, J. Chanussot, D. Brie,S. Doute, and J. Benediktsson, “On the decomposition of mars hyperspectraldata by ica and bayesian positive source separation,” Neurocomputing, vol. 71,no. 10, pp. 2194–2208, 2008.
[52] N. Dobigeon and J. Tourneret, “Library-based linear unmixing for hyperspectralimagery via reversible jump mcmc sampling,” in Aerospace conference, 2009 IEEE.IEEE, 2009, pp. 1–6.
[53] N. Dobigeon, J. Tourneret, and C. Chang, “Semi-supervised linear spectralunmixing using a hierarchical bayesian model for hyperspectral imagery,” Sig-nal Processing, IEEE Transactions on, vol. 56, no. 7, pp. 2684–2695, 2008.
[54] P. Green, “Reversible jump markov chain monte carlo computation and bayesianmodel determination,” Biometrika, vol. 82, no. 4, pp. 711–732, 1995.
[55] O. Eches, N. Dobigeon, and J. Tourneret, “Estimating the number of endmembersin hyperspectral images using the normal compositional model and a hierarchicalbayesian algorithm,” Selected Topics in Signal Processing, IEEE Journal of, vol. 4,no. 3, pp. 582–591, 2010.
[56] A. Stocker and A. Schaum, “Application of stochastic mixing models tohyperspectral detection problems,” in AeroSense’97. International Society forOptics and Photonics, 1997, pp. 47–60.
[57] T. Ferguson, “A bayesian analysis of some nonparametric problems,” The annals ofstatistics, pp. 209–230, 1973.
[58] R. Neal, “Markov chain sampling methods for dirichlet process mixture models,”Journal of computational and graphical statistics, vol. 9, no. 2, pp. 249–265, 2000.
[59] S. Niu, V. Ingle, D. Manolakis, and T. Cooley, “On the modeling of hyperspectralimaging data with elliptically contoured distributions,” in Hyperspectral Imageand Signal Processing: Evolution in Remote Sensing (WHISPERS), 2010 2ndWorkshop on. IEEE, 2010, pp. 1–4.
[60] M. Eismann, Hyperspectral remote sensing, 2012.
[61] Q. Du and H. Yang, “Similarity-based unsupervised band selection for hyperspectralimage analysis,” Geoscience and Remote Sensing Letters, IEEE, vol. 5, no. 4, pp.564–568, 2008.
[62] R. N. Clark, USGS digital spectral library. US Geological Survey, 2000.
[63] I. Research Systems, ENVI user’s guide. Research Systems, 2003.
[64] G. Swayze, R. CLARK, F. Kruse, S. Sutley, and A. Gallagher, “Ground-truthingaviris mineral mapping at cuprite, nevada,” in JPL, Summaries of the Third AnnualJPL Airborne Geoscience Workshop., vol. 1, 1992.
109

[65] E. Christophe, D. Leger, and C. Mailhes, “Quality criteria benchmark forhyperspectral imagery,” Geoscience and Remote Sensing, IEEE Transactionson, vol. 43, no. 9, pp. 2103–2114, 2005.
[66] P. Gader, R. Close, and A. Zare, “AVIRIS Data Collection over Gulfport,Mississippi,” personal communication, 2010.
[67] C. Andrieu, N. De Freitas, A. Doucet, and M. I. Jordan, “An introduction to mcmc formachine learning,” Machine learning, vol. 50, no. 1-2, pp. 5–43, 2003.
[68] C. P. Robert and G. Casella, Monte Carlo statistical methods. Citeseer, 2004, vol.319.
[69] S. Brooks, A. Gelman, G. Jones, and X.-L. Meng, Handbook of Markov ChainMonte Carlo. Taylor & Francis US, 2011.
[70] D. F. de Souza and F. A. da Silva Moura, “Multivariate beta regression.”
[71] M. S. Smith, “Bayesian approaches to copula modelling,” 2011.
[72] A. J. McNeil and J. Neslehova, “Multivariate archimedean copulas, d-monotonefunctions and l1-norm symmetric distributions,” The Annals of Statistics, pp.3059–3097, 2009.
[73] B. Johannesson and N. Giri, “On approximations involving the beta distribution,”Communications in Statistics-Simulation and Computation, vol. 24, no. 2, pp.489–503, 1995.
[74] A. K. Gupta and S. Nadarajah, “Handbook of beta distribution and its applications,”pp. 80–89, 2004.
[75] A. Zare, P. Gader, D. Dranishnikov, and T. Glenn, “Spectral unmixing using the betacompositional model,” in Hyperspectral Image and Signal Processing: Evolution inRemote Sensing, 2013. WHISPERS’13., 2013.
[76] D. Kugiumtzis and E. Bora-Senta, “Normal correlation coefficient of non-normalvariables using piece-wise linear approximation,” Computational Statistics, vol. 25,no. 4, pp. 645–662, 2010.
[77] M. C. Cario and B. L. Nelson, “Autoregressive to anything: Time-series inputprocesses for simulation,” Operations Research Letters, vol. 19, no. 2, pp. 51–58,1996.
[78] W. Hoeffding, “Masstabinvariante korrelationtheorie,” Schriften Math. Inst. Univ.Berlin, pp. 181–233, 1940.
[79] C. Cuadras, “On the covariance between functions,” Journal of Multivariate Analy-sis, vol. 81, no. 1, pp. 19–27, 2002.
[80] C. Meyer, “The bivariate normal copula,” arXiv preprint arXiv:0912.2816, 2009.
110
[81] H. Joe, “Parametric families of multivariate distributions with given margins,” Journalof multivariate analysis, vol. 46, no. 2, pp. 262–282, 1993.
[82] P. Embrechts, F. Lindskog, and A. McNeil, “Modelling dependence with copulas andapplications to risk management,” Handbook of heavy tailed distributions in finance,vol. 8, no. 1, pp. 329–384, 2003.
111

BIOGRAPHICAL SKETCH
Dmitri Dranishnikov received his Bachelor of Science degree in mathematics
from the University of Florida in 2008. He continued his studies at the University
of Florida and acquired a Master of Science in computer engineering in 2013. His
research interests include machine learning, Markov Chain Monte Carlo methods, and
Hyperspectral Image analysis.
112