A Deformation Theory of Plasticity
14
International Journal of Plasticity, Vol. 9, pp. 907-920, 1993 0749-6419/93 $6.00 + .00 Printed in the USA Copyright © 1993PergamonPressLtd. A DEFORMATION THEORY OF PLASTICITY BASED ON MINIMUM WORK PATHS KWANSOOCn-ONG and OWEN RICHMOND Aluminum Company of America (Communicated by Kenneth Neale, Universit6 de Sherbrooke) Abstract-A deformation theory of plasticity is proposed wherein the deformation paths for material elements are assumed and the plastic work becomes dependent on displacements. Among the infinite possible ways to assume deformation paths, one has been chosen that has several advantages when materials harden isotropically. Earlier, this path was shown to require the min- imum work path to achieve a desired strain. Here, a mathematical description of a constitu- tive law of deformation plasticity is developed based upon this path for rigid-plastic and for elastoplastic materials. The proposed deformation theory provides a convenient theoretical basis for FEM applications involving analysis, and especially design, of forming processes. I. INTRODUCTION In the early development of the theory of plasticity of metals, two types of theories were proposed: flow and deformation. Flow theories eventually became dominant because they reflected the observed dependence of metal behavior on deformation path. Defor- mation theory, which did not reflect this dependence, was considered accurate only in limited cases where materials deform in special ways; therefore, use of the theory dwin- dled. In 1959, Budiansky introduced a new interpretation of the deformation theory for yield surfaces with edges (vertexes). After this work, major applications of the defor- mation theory developed in the area of instability analysis: the works of Hutchinson [1974], St6ren and Rice [1975], and Neale [1989] among others. Recently, deformation theory has been used in formulating finite element modeling (FEM) codes for a variety of engineering problems. Applications of deformation the- ory in FEM are so versatile that they include designing as well as analyzing forming pro- cesses. The range of application includes rigid-plastic and elastoplastic materials. In analysis codes the deformation theory is applied incrementally, and geometry and mate- rial properties are updated at discrete steps without the use of numerical integration (Wang [1982]; Braudel et al. [1986]; Yang & Kim [1986]; Germain et al. [1989]). This differs from the conventional flow formulations that use numerical integration to update geometry and material properties. In design codes, the deformation theory is applied in a single step. These codes provide information about formability of products and opti- mized process parameters in the preliminary design stages (Chung & Richmond [1992b, 1993]). There have been some efforts to apply the deformation theory in a single step to analyze forming processes. However, this approach might not be appropriate for gen- eral forming because the deformation theory with a single step does not properly reflect the dependence of metal behavior on deformation path (Levy et al. [1978]; Chung & Lee [1984]; Sklad [1986]). To provide a theoretical basis for application of deformation theory to FEM, a spe- cial deformation theory of plasticity is developed in this article for both rigid-plastic and 907
description
A deformation theory of plasticity is proposed wherein the deformation paths formaterial elements are assumed and the plastic work becomes dependent on displacements. Amongthe infinite possible ways to assume deformation paths, one has been chosen that has severaladvantages when materials harden isotropically. Earlier, this path was shown to require the minimumwork path to achieve a desired strain. Here, a mathematical description of a constitutivelaw of deformation plasticity is developed based upon this path for rigid-plastic and forelastoplastic materials. The proposed deformation theory provides a convenient theoretical basisfor FEM applications involving analysis, and especially design, of forming processes.I. INTRODUCTIONA deformation theory of plasticity is proposed wherein the deformation paths formaterial elements are assumed and the plastic work becomes dependent on displacements. Amongthe infinite possible ways to assume deformation paths, one has been chosen that has severaladvantages when materials harden isotropically. Earlier, this path was shown to require the minimumwork path to achieve a desired strain. Here, a mathematical description of a constitutivelaw of deformation plasticity is developed based upon this path for rigid-plastic and forelastoplastic materials. The proposed deformation theory provides a convenient theoretical basisfor FEM applications involving analysis, and especially design, of forming processes.I. INTRODUCTION
Transcript of A Deformation Theory of Plasticity

International Journal of Plasticity, Vol. 9, pp. 907-920, 1993 0749-6419/93 $6.00 + .00 Printed in the USA Copyright © 1993 Pergamon Press Ltd.
A DEFORMATION THEORY OF PLASTICITY BASED ON MINIMUM WORK PATHS
KWANSOO Cn-ONG and OWEN RICHMOND
Aluminum Company of America
(Communicated by Kenneth Neale, Universit6 de Sherbrooke)
A b s t r a c t - A deformation theory of plasticity is proposed wherein the deformation paths for material elements are assumed and the plastic work becomes dependent on displacements. Among the infinite possible ways to assume deformation paths, one has been chosen that has several advantages when materials harden isotropically. Earlier, this path was shown to require the min- imum work path to achieve a desired strain. Here, a mathematical description of a constitu- tive law of deformation plasticity is developed based upon this path for rigid-plastic and for elastoplastic materials. The proposed deformation theory provides a convenient theoretical basis for FEM applications involving analysis, and especially design, o f forming processes.
I. INTRODUCTION
In the early development of the theory of plasticity of metals, two types of theories were proposed: flow and deformation. Flow theories eventually became dominant because they reflected the observed dependence of metal behavior on deformation path. Defor- mation theory, which did not reflect this dependence, was considered accurate only in limited cases where materials deform in special ways; therefore, use of the theory dwin- dled. In 1959, Budiansky introduced a new interpretation of the deformation theory for yield surfaces with edges (vertexes). After this work, major applications of the defor- mation theory developed in the area of instability analysis: the works of Hutchinson [1974], St6ren and Rice [1975], and Neale [1989] among others.
Recently, deformation theory has been used in formulating finite element modeling (FEM) codes for a variety of engineering problems. Applications of deformation the- ory in FEM are so versatile that they include designing as well as analyzing forming pro- cesses. The range of application includes rigid-plastic and elastoplastic materials. In analysis codes the deformation theory is applied incrementally, and geometry and mate- rial properties are updated at discrete steps without the use of numerical integration (Wang [1982]; Braudel et al. [1986]; Yang & Kim [1986]; Germain et al. [1989]). This differs from the conventional flow formulations that use numerical integration to update geometry and material properties. In design codes, the deformation theory is applied in a single step. These codes provide information about formability of products and opti- mized process parameters in the preliminary design stages (Chung & Richmond [1992b, 1993]). There have been some efforts to apply the deformation theory in a single step to analyze forming processes. However, this approach might not be appropriate for gen- eral forming because the deformation theory with a single step does not properly reflect the dependence of metal behavior on deformation path (Levy et al. [1978]; Chung & Lee [1984]; Sklad [1986]).
To provide a theoretical basis for application of deformation theory to FEM, a spe- cial deformation theory of plasticity is developed in this article for both rigid-plastic and
907

908 K. Cmm~ and O. RICHMOND
elastoplastic materials. The theory covers arbitrary anisotropic materials that harden iso- tropically. In this deformation theory, the deformation paths of material elements are specified, so that the plastic work becomes dependent on displacements. A mathemat- ical description of a constitutive law for the deformation theory is then derived from flow theory using the assumed deformation path. Among the infinite number of ways to assume a deformation path, one has been assumed that has several advantageous fea- tures. The specific assumed path is the minimum plastic work path in homogeneous deformation. The constitutive laws derived from the minimum work path are different from those of the conventional deformation theory. Earlier, Ponter and Martin [1972] presented theoretical work that connects the deformation theory and the minimum work path, but without explicit details of the minimum work path or derivations of the con-
stitutive laws. Derivations of the deformation theory begin with a brief review of minimum work
paths and their kinematics for rigid-plastic materials in Section II. In Section III, con- stitutive laws are derived for smooth yield conditions based on both the yield surface and its associated dissipation surface in rigid-plastic materials. In Section III, a one-step minimum work path is assumed in order to obtain results that are useful for design pur- pose FEM codes. In Section IV, the incremental deformation theory is obtained by dis- cretizing a deformation process into multistep minimum work paths. These results are useful for analysis purpose codes. In Section V, it is shown that the results derived for smooth yield conditions are also valid for yield conditions having sharp edges. The deformation theory is compared with hyperelasticity and extended to elastoplasticity in Sections VI and VII, respectively.
II. KINEMATICS OF M I N I M U M WORK PATHS
Requirements for achieving minimum work paths in homogeneous deformations are well documented in the works by HILL [1957], NADAI [1963], D ~ [1978], and HILL [1986]. In these works, it was found that the minimum work path is achieved if mate- rials deform in such a way as to satisfy two conditions: first, the set of three principal axes of stretching is fixed with respect to the material; second, the logarithms of the stretches remain in a fixed ratio. HILL [1986] proved that these two conditions are valid for any convex yield condition with isotropic hardening. Recently, CnuN6 and RICH- MOND [1992a] showed that both of the conditions are required only when the yield sur- face is smooth enough to have a unique normal direction (in such a case, the minimum work path is uniquely defined). When the yield surface has sharp edges, no unique nor- mal direction is defined at these corresponding stress states, so that the two conditions are only partially required (in such a case, multiple minimum work paths are possible). For the Tresca yield condition, for example, only the maximum stretch axis is required to be fixed with respect to the material, and no other major conditions are necessary. For isotropic materials, the fixed material lines may be chosen arbitrarily; for anisotropic materials, they are more restricted. Because of the differences in the minimum work path, the deformation theory is discussed separately for smooth yield surfaces and for
pointed yield surfaces. The minimum plastic work paths can be quantified in equations. The deformation gra-
dient tensor F describes a deformation between a final and an initial shape. F is defined, by polar decomposition, as
F ( t ) = R ( t ) . U ( t ) , (1)

Deformation theory of plasticity 909
where U is the right stretch tensor, which is symmetric, R is the orthogonal rotation ten- sor, and t is time. The three principal directions of U, because of its Lagrangian nature, refer to three material lines that are perpendicular to each other in the original config- uration. Eqn (1) represents a physical deformation process that is composed of an ini- tial stretch, U, of principal material lines followed by a rigid body rotation, R. It is a description of the total amount of deformation and the total rigid body rotation required by two prescribed geometries, but the history of deformation is only implicit.
When decomposed into principal values and directions, U and the logarithmic strain tensor eL are defined as
U( t ) = Q( t ) . , I ( t ) .Q t ( t ) , eL(t) = Q( t ) . / j ( t ) -Q t ( t ) , (2)
where the superscript t stands for transpose. In eqn (2), ,I and ~ are diagonal tensors consisting of principal values (,~i and ~i ~--- In Ai), and Q is an orthogonal rotation ten- sor consisting of the principal directions of U. Note that eL is also a Lagrangian quan- tity. When the same principal material lines are kept constant during deformation, the principal material lines of l~l and I~/~ coincide with those of U obtained for a final shape at a time tf; i.e.
U( t ) = Q( t f ) .A( t ) .Qt ( ty ) , U(t ) = Q ( t f ) . A ( t ) . Q t ( t y ) 0 < t < tf (3)
and
~L(t) = Q( t f ) .~ ( t ) .Q t ( t f ) , EL(t) = Q( t f ) . / j ( t ) .Qt ( t f ) 0 < t < tf. (4)
Let us consider a strain rate g, which is defined as
g = R t . D . R = ( l ) - U - l ) s , (5)
where D is the rate of deformation tensor, and the subscript s stands for the symmet- ric part of a tensor. The quantity g is considered to be the value D measured with respect to the coordinate system that rotates by R( t ) , so that the values are invariant with respect to R. (For this reason, ~ is called the "rotationless" strain rate by STOREN and RICE [1975].) When the same principal material lines are kept constant during deforma- tion, the principal material lines of l~l and U coincide as shown in eqn (3). Consequently, in such cases, the principal directions of g are stationary and are aligned with the prin- cipal material lines of U(tf) , regardless of arbitrary rotation R (t) , whereas the princi- pal directions of D might vary continuously; i.e.
~(t) = gL(t) = Q(t I) .~ ( t ) .Qt ( t f ) . (6)
In fact, when the same principal materials lines are kept constant, g also becomes a Lagrangian quantity whose principal directions refer to the fixed principal material lines and whose principal values mean the logarithmic (or true) strain rates of the principal material lines.
The minimum work path for a smooth yield function is achieved if deformation fol- lows the description
~(t) = ~L(t) = &(t)"eL(tf) , e( t ) = eL(t) = or(t)"eL(tf) , (7)

910 K. CHt~NC and O. RICHMOND
where a ( t ) is a function of time t, satisfying fos& d t = 1, and & is always positive. In eqn (7), the principal material lines are fixed, and the ratios of the principal true strain rates are fixed during deformation. Note that the condit ion/; = & ( t ) . g is not sufficient to describe the minimum work path, because Q can be time-dependent. Also, the con- dition in eqn (6) alone is not sufficient, because the fixed ratios of the principal true strain rates are not imposed. The minimum work path described in eqn (7) allows arbi- trary rotations, R ( t ) , of the principal material lines in eqn (1). In rigid-plasticity, mate- rials are considered incompressible; however, the fixed ratios of principal values of e ( t ) are permissible even under the incompressibility condition. When a yield surface is smooth so that normal directions are uniquely defined on the surface, ~;(t) is fully pre- scribed for a given o~ ( t ) . When a yield surface has a pointed vertex at a desired stress state, g ( t ) is not prescribed completely.
In eqn (7), e was obtained by integration of ~;, following a prescribed deformation path; g is inherently path-dependent. In contrast to this, the "logarithmic" strain ten- sor gL is defined for any two geometries, and the value is independent of deformation history: ~L is path-independent. However, ~ becomes equivalent to ~L if the principal material lines are fixed during deformation. The difference between g and gL is simi- lar to the difference between the deformation theory derived in this article and the orig- inal deformat ion theory (and hyperelasticity). For the new deformat ion theory, a path is prescribed as it is for ~, whereas the original deformat ion theory (and hyperelastic- ity) is independent of deformation history, as is IzL. Besides, there is another major dif- ference between these deformat ion theories as is shown in the following section.
IlL RIGID-PLASTIC DEFORMATION THEORY FOR SMOOTH YIELD SURFACES
The effective yield stress, 6, and the associated effective strain rate, ~, are defined in the Cauchy stre_.ss space, a, and in the rate of plastic deformation space, D, respectively. Because 6 and 6 are materially embedded properties, they are invariant with respect to any rotation by "objectivity." Therefore, they can be written in terms of ~ and its con- jugate stress, 7 (defined as r = R t . o . R ) , simply by replacing D and cr with ~ and r, respectively; i.e.
6(0) = ~ (7 ) , ~(O) = ~ (~ ) , (8)
where ~ and ~ are the effective stress and the associated effective strain rate defined in the r and ~ spaces, respectively. Note that eqn (8) expresses "objectivity," but not "isot- ropy." The definitions of g and ~ are considered first-order homogeneous functions here for isotropically hardening materials.
By applying the minimum work path in eqn (7), the minimum effective strain is obtained as
~( t f ) = ~(~) d t = ~(~L) & dt = ~(GL(t f ) ) (9)
if the yield surface is smooth I and materials harden isotropically. Isotropic hardening throughout this article implies that the definitions of g and ~ do not change during defor-
INote that eqn (9) is also valid for pointed yield surfaces even though the minimum work path expressed in eqn (7) is not rigorously required for such cases. This is because the set of multiple minimum work paths for pointed yield surfaces contains the minimum work path expressed in eqn (7).

Deformation theory of plasticity 911
mations. Eqn (9) shows that the total effective strain g in the minimum work path is obtained from ~ in eqn (8) simply by replacing g with 8L (tf) . Eqn (9) is equivalent to
= & ( t ) . ~ ( t y ) , ~;(t) = a ( t ) . g ( t f ) . (10)
The deformation theory is derived by applying the relations in eqns (7) and (10) to the flow theory.
The constitutive equation for the flow theory of incompressible rigid-plastic materi- als is obtained from the normality rule, which is
D = ,~ a a ( , , ) _ ~, a a ' ( , , ' ) a o 0 o ' ' (11)
where o ' is the deviatoric part of o. By "objectivity," eqn (1 l) is equivalent to
_. 0~ _. 0~' t = e ~ -- e Or' (12)
where r ' is the deviatoric part of r. Eqns (11) and (12) satisfy the relation of the rate of plastic work density per unit volume, fi,:
fi, = o .D = o ' . D = r.[; = r " g = 66 = ~ . (13)
An explicit representation of the constitutive relation for deformation plasticity is now obtained from eqn (12) by applying eqns (7) and (10); i.e.
0~ g = ~ ; ~ ~ = ~ : - - a ¢ ' R . E . R , - aa _ aa-- ( 1 4 ) 0r ' ' g: 0o 0o ' "
As a conjugate quantity for #, ~ is derived from eqn (13) for a specified effective stress: 6 forms a yield surface in stress space, and 6 forms an associated surface in strain rate space, which is called the "dissipation surface" by ZIEGLER [1977]. Consequently, the normality rule can be expressed for a dissipation surface in the rate of plastic deforma- tion space as
,,' = a' ~a- ,., = ~, o~ (15) 0 D ' 0~"
For the minimum work path, eqn (15) becomes
z' = ~,0~: o' = R ~,0~: .R t (16) 0~' 0g
after eqns (7) and (10) have been applied. Eqns (16) show alternative forms of the con- stitutive laws of the deformation theory defined for the dissipation surface. In eqns (14) and (16), the direction of r ' is fixed if materials harden isotropically, while a ' is in an arbitrary direction depending on R. (Because ~ is independent of hydrostatic pressure for incompressible materials, r is not completely determined). The secant slope H is defined as Wg(=0/~) .

912 K. CHUNG and O. RICHMOND
Eqns (14) and (16) represent constitutive relations for deformation plasticity when the minimum work path is assumed. Not only do these equations satisfy the objectivity rule, but also R is arbitrary, which allows arbitrary rigid-body rotations during deformation. The equations describe a deformation theory for large deformations and arbitrary aniso- tropic materials that harden isotropically. Comparison of the derived equations and the original flow rules shows that the constitutive relations in deformation plasticity are obtained from the normality rule simply by replacing a ' , D, and ~ with r', e and ~, respectively. When the Mises yield condition is assumed, eqns (14) and (16) become
a ' = ( R . e . R ' ) . (17)
Even though the original deformation theory proposed by HENCKY [1924] for Mises materials and small deformations is path-independent, the equation is known to com- ply with the flow theory when a ' is proportional under the isotropic hardening condi- tion. Because r ' is proport ional in the theory based on the minimum work path, although a ' is arbitrary, there is a difference between the equations of the two defor- mation theories. When isotropic materials harden isotropically, for example, the orig- inal deformation theory complies with the flow theory for simple shear; however, the deformation theory discussed here does not comply because simple shear is not the min- imum work path. The equations of the two theories become identical when R = I (iden- tity tensor), as is the case for pure shear.
When the new deformation theory is applied as a one-step process for a whole defor- mation, it is called the total deformation theory. FEM formulation based on the total deformation theory is a useful tool for process design. In a design code, materials are assumed to deform in a prescribed manner that is considered ideal, and the code pro- vides information about the formability of products. The minimum work path is espe- cially useful because formability of many metals might be assumed optimum in such a path. For special forms of the yield function, a code based on such paths can also pro- vide information about optimum process parameters. Detailed discussions on this sub- ject can be found elsewhere (Cnu~o 8~ RICHMOND [1992,1993]).
IV. INCREMENTAL DEFORMATION THEORY FOR MULTIPLE STEPS
The deformation theory derived in Section III can be applied to a multi-step process where a whole process is discretized into several finite steps: the incremental deforma- tion theory. Discretization is an inevitable procedure in the numerical analysis of a pro- cess, and a deformation path is assumed during discretized time steps. Conventional approaches involve numerical integration schemes that usually assume various paths at element nodes. Employing the incremental deformation theory introduces the minimum work path during the discretized step, and no integration scheme is necessary; thus the incremental deformation theory is useful in developing FEM codes to analyze processes. Derivation of the incremental deformation theory, which follows the same procedure as for the total deformation theory, is summarized below.
In the multi-step process, consider an i-th step deformation during a discretized time period, t 0 - t < to + At, as
F ( t ) = A f i ' A f i-1 ' ' ' Af I = A f i ' F ( t o ) = ( A r i ' A n i ) -F(to), (18)

Deformation theory of plasticity 913
or equivalently as
F ( t ) = A r i ( t ) • ( Q i . A A i ( t ) . (Qi ) t ) 'F( to) . (19)
In eqn (19), Q~ and AA t are an orthogonal tensor and a diagonal tensor consisting of the principal directions and stretches of Au i, respectively, which are based on the con- figuration at t = to. The incremental logarithmic strain Ag~ is obtained from A u ~ as
A~it ( t ) = Qi . At~i( t ) . (Qi), (20)
where
A/j i = ln(AAi). (21)
The minimum work path for smooth yield conditions is applied to each discretized step: the minimum work path at each discretized step is achieved when the same prin- cipal material lines are fixed and the ratio of principal logarithmic strain rates is kept constant during each step (see CrIoNc a: RICHMOND [1992a]). Now, we define g~ as
~i = d( Al~i)/dt = ( A r i ) t . D . (Ari) . (22)
Note the difference between the definitions of ~ in eqns (22) and (5). The definition in eqn (5) is valid when the principal stretch directions are fixed all the way from the start to the end.
The minimum work conditions are satisfied when deformation satisfies the follow- ing relation:
~i(t ) .i = e L ( t ) = &i( t )"AeiL( to + A t ) , A e i ( t ) = A e i t ( t ) = a i ( t ) " A g i t ( t o + A t ) ,
(23)
where cti( t) is a function of time, satisfying ~to+4t. i i Jto oL dt = 1, and & is always positive. Eqn (23) shows that the principal material lines are fixed, and the ratios of the princi- pal true strain rates are fixed during the discretized steps. Eqn (23) is similar to eqn (7). In fact, eqn (23) is general, and eqn (7) is obtained from eqn (23) when a whole process is considered as one step.
The minimum effective strain at the i-th step is also similar to eqn (9); i.e.
[ ' t o + A t . .
A ~ ( t o + A t ) = | ~(6) dt = zl~i(Ae~L(to + At)) a,o
(24)
or, equivalently,
~ = & t ( t ) . A ~ ( t o + A t ) , A ~ ( t ) = u~ ( t ) .Ag i ( t o + A t ) (25)
if the material hardens isotropically along the minimum work path during the interval. If the material hardens anisotropically, AU is different for each step because A~; evolves.
The constitutive laws for the incremental deformation theory are obtained by apply-

914 K. CmJN~ and O. RICHMOND
ing the relations in eqns (23) and (25) to the flow theory, and following the same pro- cedures as in Sections III. Now, eqns (14) and (15) become
Aa i = ZIg i ~9¢' 3 ( ? ' ) ' ), ~ O, j~ . ~ #7 ~ = g g i a ( r , ) i , ( r ' = --BAli, (26)
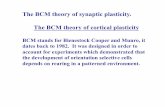
respectively. The secant slope, H, is defined as zaf/A~:(=A#/A~) in the incremental case. The incremental deformation theory for rigid-plastic materials is illustrated in Fig. 1 (a),
for discrete steps. Note that there is a discontinuous shift of the direction of r ' between
A I i A E i + 1
I
/ _ ~ _ /d \\
~- i+1
J \\ I, I
/ ' ?' ~i-1
(a)
,i + 1/~--.....
~ ~ /,~C ip \ \ \ \
(b)
Fig. 1. Schematic representations of FEM applications of the incremental deformation theory in the devia- toric stress ( r ' ) space for (a) rigid-plastic (b) etastoplastic materials.

Deformation theory of plasticity 915
the steps. The value of Q in eqn (19) is constant within each step, but it is different for different steps. The change in the magnitude of r ' is controlled by the slope, H. In vis- coplastic applications, A ~ / A t approximates ~, and it has different values for different incremental steps to simulate changes of strain rate during deformation processes.
V. RIGID-PLASTIC DEFORMATION THEORY FOR P O I N T E D YIELD SURFACES
Derivations of the constitutive laws for the total and incremental deformation theo- ries in Sections III and IV are valid for smooth yield surfaces, where minimum work paths are uniquely defined. When a yield surface has a pointed vertex at a desired stress, multiple minimum work paths are possible and the condition in eqn (7) is not fully required. However, the final equations in Sections III and IV are valid even for multi- ple minimum work paths, and this is discussed here. Only the total deformation theory is considered because the case of the incremental deformation theory is similar to the case of the total deformation theory.
The case with a pointed yield surface is illustrated in Fig. 2. In Fig. 2(a), point A has multiple normals (therefore, multiple/~) on the yield surface defined in the deviatoric stress space. A corresponding dissipation surface in the strain rate space is shown in Fig. 2(b). On the surface between B and C, the normal direction is commonly in the direction of r'. All the multiple ~ at A (or, between B and C) have the same w( = r ' .g), so that there are multiple minimum work paths (e.g. the dotted paths are typical mini- mum work paths between A and A'). For each minimum work path, eqn (7) is not required because the ratios of components of ~ are not fixed.
(a)
(b)
Fig. 2. Schematic demonstrations of (a) a piecewise smooth yield surface having multiple normal directions at A, and (b) a corresponding rate of effective strain surface.

916 K. CHUNG and O. RICHMOND
Validation of eqn (16) is obtained f rom the relation
m = f r'.a = f ae, (27)
where m is the minimum work per unit volume. In eqn (27), m is a potential function for each minimum work path because the values of r ' - g are the same for all * in Fig. 2; i .e .
Om dm Og Og r . . . . ~' . (28)
0~ dg 0~ 0~
Therefore, eqn (16) is valid for each of the multiple minimum work paths. Also, the fol- lowing relation is obtained f rom eqn (28):
r ' - e = ? ' ~ . a = ~'g (29) Oa
after the Euler theorem is used. Now, in order to verify that eqn (14) is also valid for multiple minimum work paths,
consider the following relation:
~(-_ f , dt = f e °~' dt) = K Or' Or' (30)
where K is a scalar quantity. Eqn (30) is possible because one of the multiple normal directions 0 g ' / 0 r ' is parallel to each of ~, which is the value at the terminal state avail- able f rom the multiple minimum work paths. The value of K is obtained f rom eqn (29) after eqn (30) is substituted: K = g. Therefore, eqn (14) is valid for each of E available at A and one of the multiple normal directions 0 ~ ' / 0 r ' which is parallel to it.
VI. COMPARISON WITH HYPERELASTICITY
The constitutive relation for hyperelasticity is known to be
2 0o~(C) o - - - F ' - - ' F t, ( 3 1 )
det(F) 0C
where ~0(C) is a strain energy function per unit initial volume and C is the Green defor- mation tensor. To compare this with deformat ion plasticity, this equation is rewritten with respect to o~(sL) as follows. (Note that o~ is not a function of g, because E is path- dependent.) The definition of gL in eqn (2) suggests that ~ = U = exp(gL); therefore, eqn (31) becomes equivalent to
2 0o~(C(~L)) r - exp(I;L)- • exp(~L)t. (32)
det(F) 0C
For incompressible hyperelasticity, eqn (32) becomes
2 .&o(C(~D) r ' = exp(~L) • exp(•L) t. (33)
0C

Deformation theory of plasticity 917
Comparison of eqn (33) with eqn (16) shows that deformation plasticity is similar to incompressible hyperelasticity because a current stress state is determined by a current strain state (note that 8 in eqn (16) is equivalent to tL for the minimum work path). Even though the constitutive equations are similar, there is a major difference between the present deformation theory of plasticity and hyperelasticity: there is no assumption of a deformation path in hyperelasticity (as was also the case in the original deforma- tion theory), whereas the present deformation theory of plasticity assumes a minimum work path.
VII. ELASTO-PLASTIC DEFORMATION THEORY
In elastoplastic deformation theory, the total deformation gradient, F, becomes
F = F e ' F p = (Re.ue) • (RP.U p) (34)
if the theory by LEE [1969] is followed. The superscripts e and p stand for elastic and plastic deformations, respectively. In the deformation theory for elastoplastic materi- als, plastic deformation is assumed to follow the minimum work path under isotropic hardening, and the principal material lines for plastic deformation are assumed to coin- cide with the principal material lines for elastic deformation. Under this assumption, eqn (34) becomes
F = (R e .RP) • (LIe . U P ) , (35)
where the principal material lines of ~e (= (R p)t. U e" R p) and U p are the same. There- fore, the following relation is obtained:
= 6~ + 8 p. (36)
The constitutive equation for the elastoplastic deformation theory is obtained from eqn (36) when E~ and gP are substituted in the elastic and plastic constitutive equations, respectively. The plastic part is obtained from eqn (14). For the elastic part, three choices might be considered: hyperelasticity, Cauchy elasticity, and hypoelasticity. When hyper- elasticity is considered, G~ is obtained from eqn (32). When Cauchy elasticity is consid- ered, the elastic part is obtained from the relation
r = r(E~). (37)
When hypoelasticity is considered, the elastic part is derived from the hypoelastic rela- tion, which is linear; i.e.
b = K - D e, (38)
where K is a fourth order tensor. In eqn (38), the notation ~ stands for an objective Cauchy stress rate. # was originally defined as the Jaumann rate of a. However, a proper definition of an objective Cauchy stress rate became controversial recently, as shown in the works by Dmr~ES [1979] and LEE e t al . [1983] among others. Here, the objective rate proposed by Dienes is used purely for explanation purposes. Then, b ( =# - ~. o + o.o~, where oJ = R . R t) becomes R.,/-.R t, so that eqn (38) becomes
~" = K'~e- (39)

918 K. CHUNG and O. RICHMOND
Because ~ is path-dependent, so is the integration of eqn (39). When the principal mate- rial lines for elastic deformation are fixed, eqn (39) becomes
~" = K.e~. (40)
When the classical Hooke's law is used for the elastic part, and eqn (40) for Mises mate- rials is used for the plastic part, the constitutive equation for small deformation and small rotation becomes the original deformation theory proposed by HENCKY [1924].
In elastoplasticity, elastic and plastic deformations are responses to the same stress: i.e. r = re = .r p. Therefore, the condition in deformation plasticity that the principal material lines of elastic and plastic deformations should coincide in the deformation the- ory is a restriction on material properties; elastic and plastic deformations have the same principal material lines in response to the same stress. If materials are isotropic both in elastic and plastic responses, the condition might be satisfied without a problem. If either the elastic deformation or the plastic deformation is anisotropic, the condition will not be satisfied, unless the anisotropic responses of both the elastic and the plastic defor- mations always have the same principal material lines in response to the same stress. If the principal material lines of elastic and plastic deformations in eqn (34) do not coin- cide, the additive decomposition of the strain in eqn (36) is not assured, so that the con- stitutive equation becomes involved.
The incremental deformation theory for elastoplasticity is obtained from the follow- ing relation:
D = D e + D p. (41)
The additive decomposition of the strain rate in eqn (41) is an assumed relation; how- ever, LUBARDA and LEE [1981] showed that this relation is assured from eqn (34) when materials are isotropic and elastic deformations are small compared to plastic deforma- tions as in metals. When principal material lines and principal values are assumed fixed for elastic and plastic deformations respectively during a time increment, eqn (41) becomes
A t = A E ie + /tF. ip, (42)
where Ae ip and A~. ie a r e the increments of the plastic true strain and the elastic strain at the i-th step, respectively. Incremental application of elastoplasticity for FEM anal- ysis is illustrated in Fig. 2(b). In Fig. 2(b), zig ip is a response to r i, and the relation in eqn (26) is used. Ae ie is a response to Ar i, and the relation is linear for a small incre- ment; i.e.
A r i = K . Ag~[. (43)
The linear relation in eqn (43) can be obtained from hyperelasticity, Cauchy elasticity, or hypoelasticity; for small elastic deformation, the difference between them becomes trivial.
VIII. SUMMARY
Even though the deformation theory of plasticity has been known to be accurate for the description of mechanical properties of metals only in limited cases, the theory has

Deformation theory of plasticity 919
been found useful in FEM applications for both analysis and design purposes. To pro- vide a theoretical basis for these applications, a special deformation theory has been developed from flow theory here by assuming a minimum work path and isotropic hard- ening. The theory was obtained for arbitrary yield conditions including yield conditions having pointed vertices. In this deformation theory, the objective constitutive equations were easily obtained from flow theory simply by replacing variables without changing the forms of equations. The "rotationless" strain rate g and its work-conjugate stress 7 were found to be convenient for this purpose. The equations of the deformation the- ory were obtained for an incremental approach as well as for a total approach. The deformation theory for elastoplastic materials was covered as well as that for rigid-plas- tic materials.
Acknowledgement-The authors thank Dr. R.L. Mallett for his critical review of this article.
REFERENCES
1924 HENCKY, H., "Zur Theorie Plastischer Deformationen und der Hierdurch Hervorgerufenen Nach- spannunger," Zeits. Angew. Math. u. Mech., 4, 323.
1957 HILL, R., "Stability of Rigid-Plastic Solids," J. Mech. Phys. Solids, 6, 1. 1959 BUDIANSKY, B., "A Reassessment of Deformation Theories of Plasticity," J. Appl. Mech., 26, 259. 1963 NADAI, A., Theory of Flow and Fracture of Solids, Vol. 2, McGraw-Hill, New York, pp. 96-105. 1969 LEE, E.H., "Elastic-Plastic Deformation at Finite Strains," J. Appl. Mech., 36, 1. 1972 PONTER, A.R.S. and MARTIr~, J.B., "Some Extremal Properties and Energy Theorems for Inelastic
Materials and Their Relationship to the Deformation Theory of Plasticity," J. Mech. Phys. Solids, 20, 281.
1974 HUTCHINSON, J.W., "Plastic Bucking," Adv. Appl. Mech., 14, 67. 1975 STOREN, S., and RICE, J.R., "Localized Necking in Thin Sheets," J. Mech. Phys. Solids, 23, 421. 1977 ZmGLER, H., An Introduction to Thermomechanics, North-Holland Publishing Company, Amster-
dam, pp. 287-290. 1978 DAMAMME, G., "M6canique des Milieux Cont inus . -Minimum de la D6formation G6n6ralis~e d'un
l~16ment de Mati&e, pour les D6formation Passant d'un I~tat Initial ~t un l~tat Final Donn6s," Comtes Rendus, Academic Society of Paris, 287, 895.
1978 LEVY, S., SHIN, C.F., WILKINSON, J.P.D., STINE, P., and MCWILSON, R.C., "Analysis of Sheet Metal Forming to Axisymmetric Shapes," in Formability Topics--Metallic Materials, ASTM STP 647, Amer- ican Society of Testing and Materials, Philadelphia, pp. 238-260.
1979 DIENES, J.K., "On the Analysis of Rotation and Stress Rate in Deforming Bodies," Acta Mechan- ica, 32, 217.
1981 LUBARDA, V.A., and LEE, E.H., "A Correct Definition of Elastic and Plastic Deformation and Its Computational Significance," J. Appl. Mech., 48, 35.
1982 WANC, N.M., "A Rigid-Plastic Rate-Sensitive Finite Element Procedure for Sheet Metal Forming Pro- cesses," in Proc. International Conference on Numerical Methods in Industrial Forming Processes, Pineridge Press, Swansea, U.K., pp. 797-806.
1983 LEE, E.H., MALLETT, R.L., and WERTHEIMER, T.B., "Stress Analysis for Anisotropic Hardening in Finite-Deformation Plasticity," J. Appl. Mech., 50, 554.
1984 CrloNC, K., and LEE, D., "Computer-Aided Analysis of Sheet Material Forming Processes," in Proc. 1st International Conference of Technology in Plasticity, Vol. 1, pp. 660-662.
1986 BRAUDEL, H.J., ABOtlAF, M., and CHENOT, J.L., "An Implicit and Incrementally Objective Formu- lation for Solving Elastoplastic Problems at Finite Strain by the F.E.M. Application to Cold Forg- ing," in MATTIASSON, K. et al. (ed.) Proc. 2nd International Conference on Numerical Methods in Industrial Forming Processes (NUMIFORN'86), Balkema, Rotterdam, pp. 255-260.
1986 HILt, R., "Extremal Paths of Plastic Work and Deformation," J. Mech. Phys. Solids, 34, 511. 1986 SKI.AD, M.P., "The Numerical Analysis of the Influence of the Material Hardening Behavior on Strain
Distribution in Drawing Sheet Metal Parts of Complex Shape," in Proc. Congress of International Deep Drawing Research Group, pp. 464-467.
1986 YANG, D.Y., and Kna, Y.J., "A Rigid-Plastic Finite-Element Formulation for the Analysis of Gen- eral Deformation of Planar Anisotropic Sheet Metal and its Application," Int. J. Mech. Sci., 28, 825.
1989 GES.MAn'L Y., CI-ItlNG, K., and WAGONER, R.H., "A Rigid-Visco-Plastic Finite Element Program for Sheet Metal Forming Analysis," Int. J. Mech. Sci., 31, 1.
1989 NEALE, K.W., "Numerical Analysis of Sheet Metal Wrinkling," in THOMPSON, E.G. et al. (ed.) Proc.

920 K. CHUNG and O. RICHMOND
1992a
1992b
In press
3RD INTERNATIONAL CONFERENCE IN INDUSTRIAL FORMING PROCESSES (NUMIFORN'89), BALKEMA, ROTTERDAM, PP. 501-505. CHUNG, K., and RICHMOND, O., "Ideal Forming, Part l: Homogeneous Deformation with Mini- mum Plastic Work," Int. J. Mech. Sci., 34, 575. CHUNG, K., and RICHMOND, O., "Ideal Forming, Part II: Sheet Forming with Optimum Defor- mation," Int. J. Mech. Sci., 34, 617. CHONG, K., and RICHMOND, O., "Mechanics of Ideal Forming," J. Appl. Mech.
Aluminum Company of America Alcoa Center Pennsylvania, USA
(Received 2 December 1991; in final revised form 24 May 1993 )