







Languages
Pages
Legal

CogSci 1: Introduction to Cognitive Science
Intelligent control of action inbiology and engineering
Emanuel Todorov
Cognitive Science DepartmentUniversity of California San Diego
2
Why do we have a brain?
• the purpose of the brain is to produce adaptable and complex movements
• movement is the only way we have– of interacting with the world– of communicating (speech, gestures, writing)
• sensory, memory and cognitive processes have evolved to guide movement
TREES DO NOT NEED BRAINS,BECAUSE THEY DO NOT HAVE MUSCLES
3
vs.
High-level
vs.
Low-level
Levels of control
4
5
Internal models: ability to (learn to) predictExternal stimulus
Response
Time
Self-generated stimulus
Response
Time
Normal Perturbed Adapted Aftereffect
Force
6
Adaptation to force fields(Shadmehr et al)
7
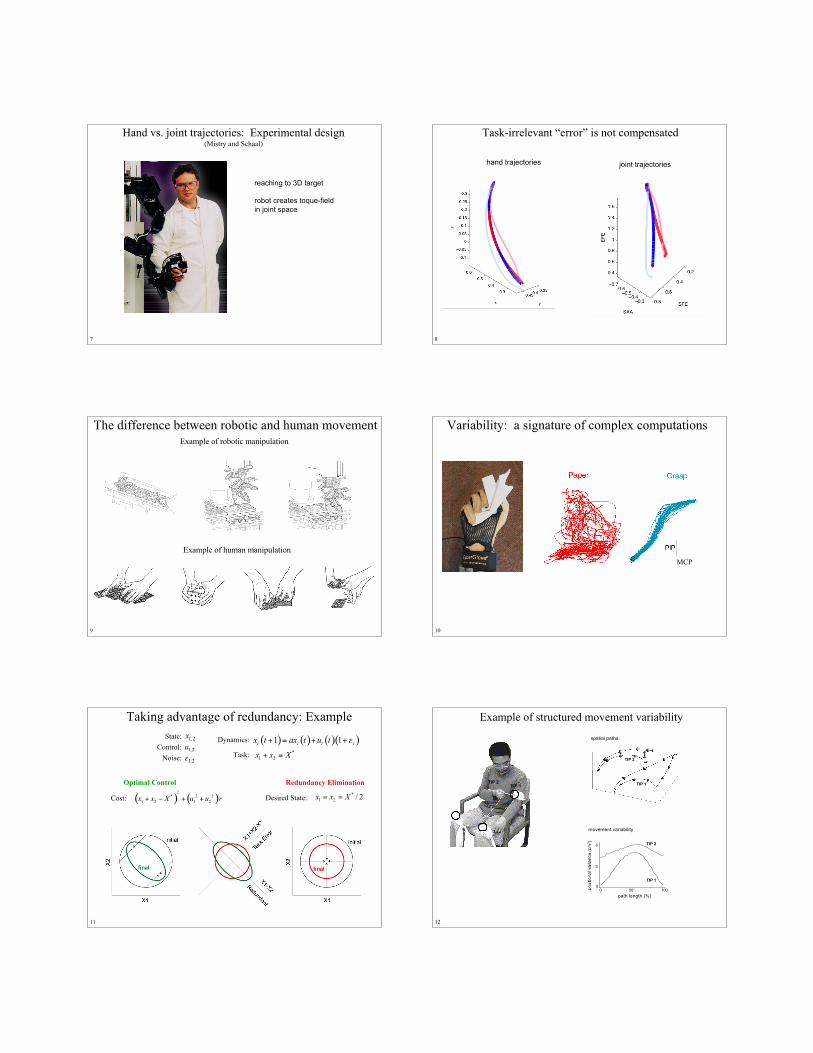
Hand vs. joint trajectories: Experimental design(Mistry and Schaal)
reaching to 3D target
robot creates toque-fieldin joint space
8
hand trajectories joint trajectories
Task-irrelevant “error” is not compensated
9
Example of robotic manipulation
The difference between robotic and human movement
Example of human manipulation
10
Variability: a signature of complex computations
MCP
11
( ) ( ) ( )( )1 1i i i ix t ax t u t !+ = + +2,1x
2,1u
State:Control:
Dynamics:
Taking advantage of redundancy: Example
*
1 2x x X+ =Noise: 2,1!
Task:
*
1 2/ 2x x X= =Desired State:
Redundancy Elimination
( ) ( )2
* 2 2
1 2 1 2x x X u u r+ ! + +Cost:
Optimal Control
12
0 50 1000
3
6
path length (%)
TIP 1
TIP 2
TIP 1
TIP 2
TIP 1TIP 2
spatial paths
movement variability
Example of structured movement variability
Top Related