






Languages
Pages
Legal


Arizona’s First University.
Using Integrative Modeling forAdvanced Heterogeneous SystemSimulation
Tapasya Patki, Hussain Al-Helal, Jacob Gulotta,Jason Hansen, Jonathan Sprinkle
In collaboration with Vanderbilt University,and the University of California, Berkeley.Supported by US AFOSR.
Corollary: If everyone has ahammer, then you will not useanyone else’s nails.
Thm (Kelly): If all you have isa hammer, look out for yourthumb, and all that.

211/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
What kinds of heterogenous systems are we interested in?

311/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
What motivates us to integrate?
ControlIntegration Framework
Platform Control Integration
411/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
What domain is this anyway?
• Command and Control– Lots of decision makers, looking at tactical data, making command
decisions.– Lots of monitors– Lots of data– Lots of decisions to make
• Types?– Tactical actors (manned/unmanned components)– GUI elements (human interfaces)– Vignettes (tactical tests)
• Example vignette:– A UAV is sent to a location to look for blue trucks. After a blue truck is
spotted, the UAV reports its location. The C2 staff tell that UAV to “track” theblue truck. The UAV then stays as close as it can.
• Example problems:– What kind of UAV is it? What kinematic/dynamic properties does it have?– What connection/network settings do I use? Am I communicating via
TCP/IP, or something more primitive?
511/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
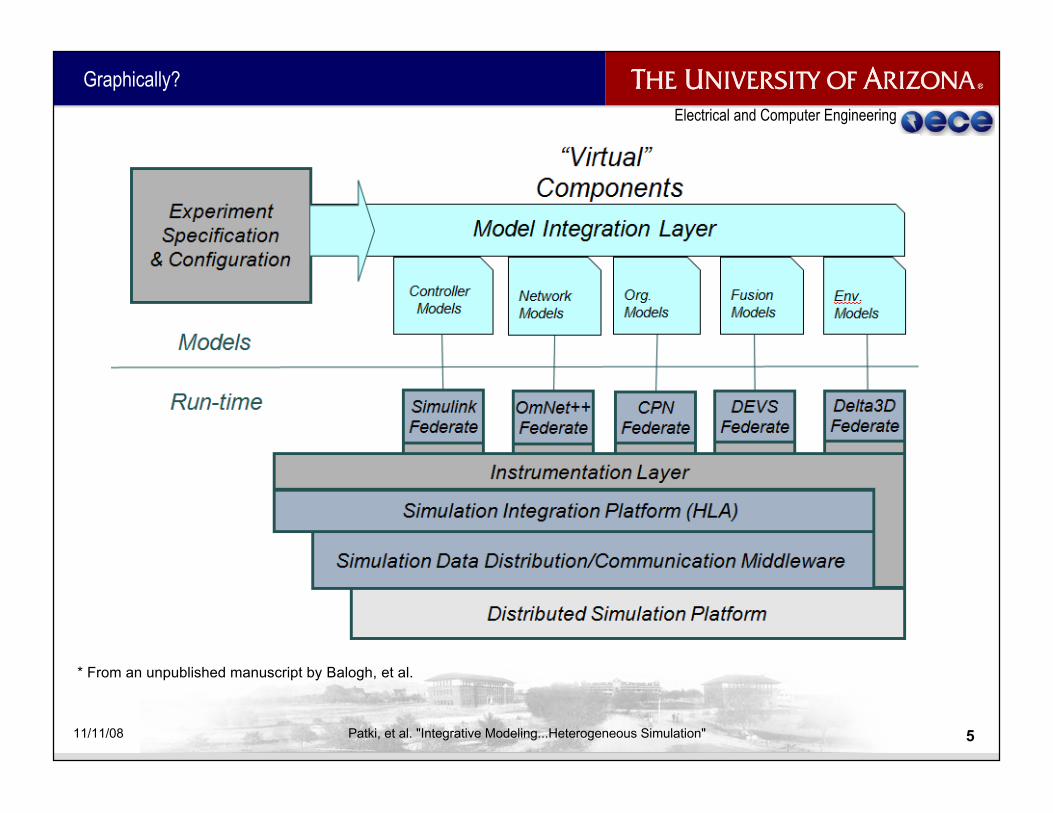
Graphically?
* From an unpublished manuscript by Balogh, et al.

611/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
What’s the hardest thing about integrative modeling?
CONTROLLER
AND
OBJECT SEARCH
(MATLAB
SIMULINK)
VISUALIZATION
(DELTA -3D)
Position Update
Found Target
New Waypoint
GROUND
STATION
(JAVA)
Search for target
Track target
Lost Target
VEHICLE
POSITION
(JAVA)
Position Information
Position Information
CONTROLLER
AND
OBJECT SEARCH
(MATLAB
SIMULINK)
VISUALIZATION
(DELTA -3D)
Position Update
Found Target
New Waypoint
GROUND
STATION
(JAVA)
Search for target
Track target
Lost Target
VEHICLE
POSITION
(JAVA)
Position Information
Position Information
The integrative modeling part…

711/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
Defining the Message and Integration Types
ReturnToBasetime : doubleBase_ID : String
SearchForTargetfeature : Stringradius : doublez : doubley : doublex : double
UAVControluav_id : Stringcontrol : String
TrackTargetsuspected_z : doublesuspected_y : doublesuspected_t : doublesuspected_r : doublesuspected_x : doublevz : doublevy : doublevx : doubletarget_t : doubletarget_r : doubletarget_z : doubletarget_y : doubletarget_x : doubletarget_id : String
BestEffortReceivesend_interaction_handle : int
idxyzvxvyvz
name
Vehicle
delfrafrasenrecpla
lasfrasen
SendStreamVeryLowPrioMediumPrio
ObjectRoot
SimLogComment : StringTime : doubleFedName : String
SimResume SimEndSimPause
TextMessage
message : String
AutomaticBDA
z : doubley : doublex : double
DirectControl
TODO : String
NewWayPointt : doubley : doublez : doublex : double
UAVCommand
HighPrio
LowPrio
SimpleMessagemessage : String
NetworkInteraction
BestEffortSendsize : intsender_ip : Stringreceiver_ip : String
sender_ipreceiver_ipframe_rateframe_sizesending
playingdelay
frame_losslast_received_f
ReceiveStream
PosUpdate
time : doublez : doubley : doublex : doubleyaw : doublevy : doublevz : doublevx : doublepitch : doubleroll : double
SimulationControl
InteractionRoot

811/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
Defining the Message and Integration Types
ReturnToBasetime : doubleBase_ID : String
SearchForTargetfeature : Stringradius : doublez : doubley : doublex : double
UAVControluav_id : Stringcontrol : String
TrackTargetsuspected_z : doublesuspected_y : doublesuspected_t : doublesuspected_r : doublesuspected_x : doublevz : doublevy : doublevx : doubletarget_t : doubletarget_r : doubletarget_z : doubletarget_y : doubletarget_x : doubletarget_id : String
BestEffortReceivesend_interaction_handle : int
idxyzvxvyvz
name
Vehicle
delfrafrasenrecpla
lasfrasen
SendStreamVeryLowPrioMediumPrio
ObjectRoot
SimLogComment : StringTime : doubleFedName : String
SimResume SimEndSimPause
TextMessage
message : String
AutomaticBDA
z : doubley : doublex : double
DirectControl
TODO : String
NewWayPointt : doubley : doublez : doublex : double
UAVCommand
HighPrio
LowPrio
SimpleMessagemessage : String
NetworkInteraction
BestEffortSendsize : intsender_ip : Stringreceiver_ip : String
sender_ipreceiver_ipframe_rateframe_sizesending
playingdelay
frame_losslast_received_f
ReceiveStream
PosUpdate
time : doublez : doubley : doublex : doubleyaw : doublevy : doublevz : doublevx : doublepitch : doubleroll : double
SimulationControl
InteractionRoot

911/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
Defining Component Interconnectivity
UAVGSOpUAV
PosUpdatetime : doublez : doubley : doublex : doubleyaw : doublevy : doublevz : doublevx : doublepitch : doubleroll : double
NewWayPointt : doubley : doublez : doublex : double

1011/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
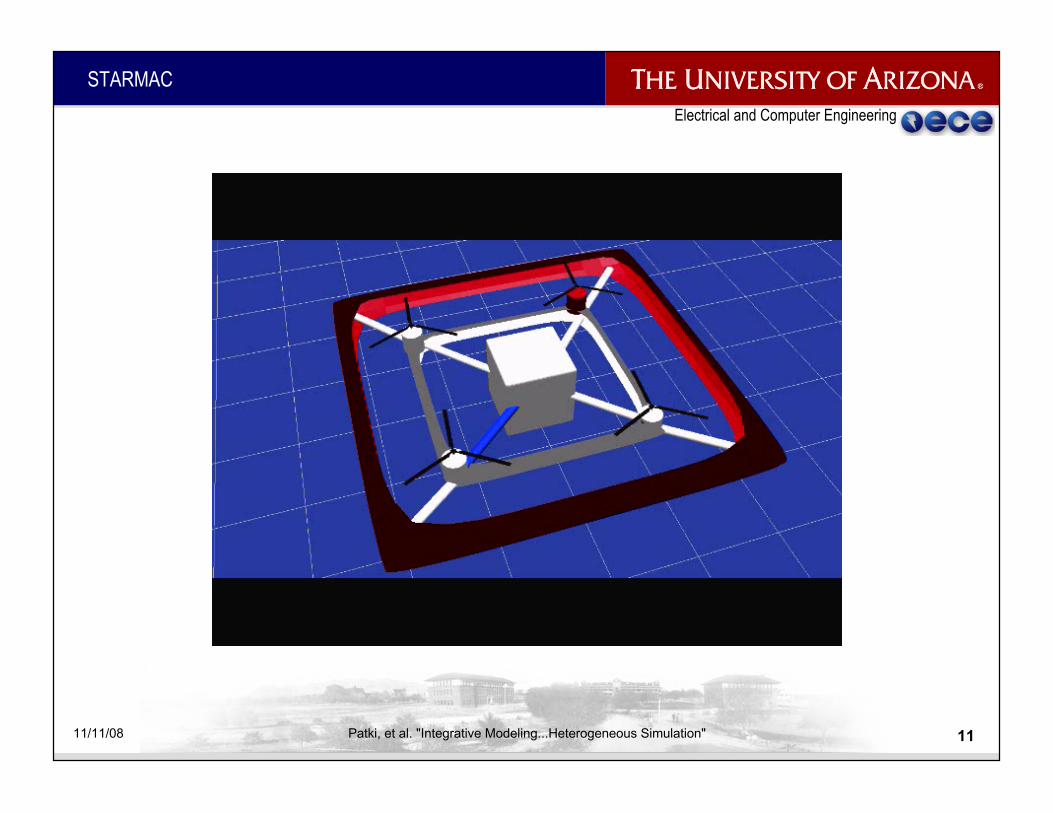
Making our UAV look right
• A realistic model of the STARMAC was created using Blender• Rendered model used to represent UAV during simulation• Multiple instances of the rendered model can be used to simulate
swarms of rotorcraft
A “default” rotorcraft
1111/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
STARMAC
1211/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
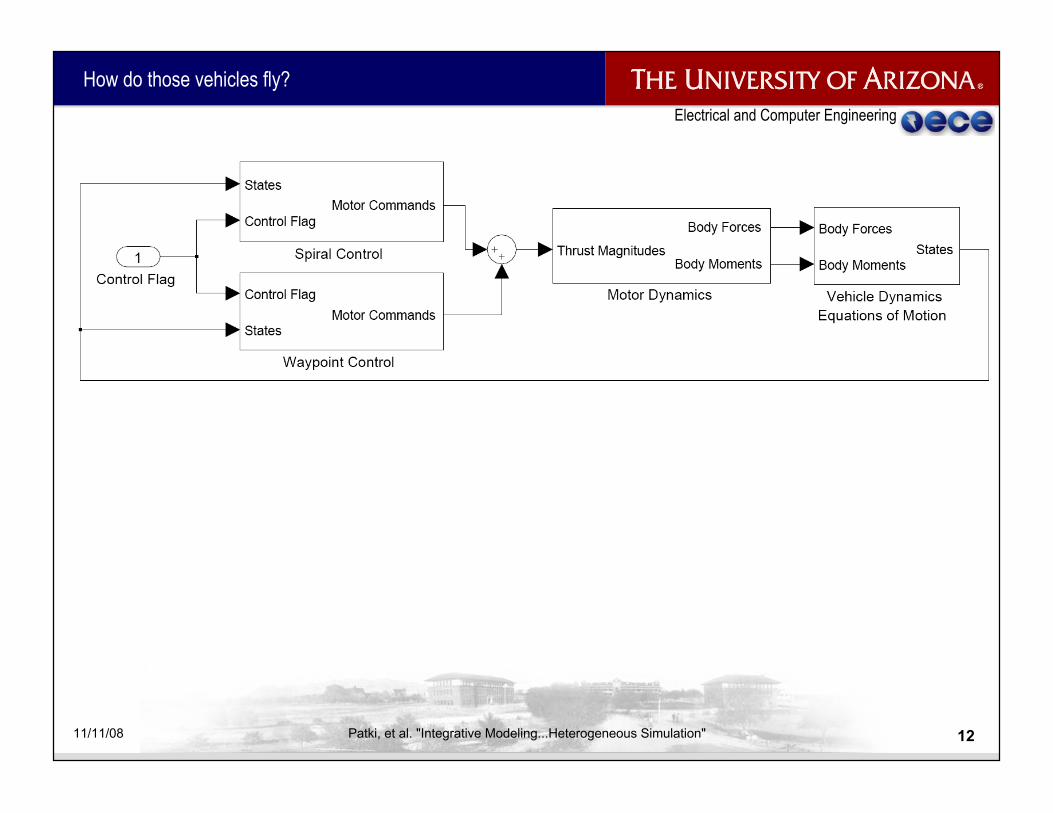
How do those vehicles fly?

1311/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
A small wrinkle: image processing in simulation
Delta3D Reported Location
Gives GPS Location of
Object
If Object is In FoV
Get a Pixel Location for the Object
Introduce Error to
Simulate Data
Return to GPS Coordinates
Object is Now in
Some Area
Software Camera Sensor Algorithm

1411/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
Demos
• The GME Paradigm: what gets generated?• Camera models: where are things executed?• Vehicle dynamics: where does the logic live?

1811/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
A thought on domains (again…)
• In the “domain” of heterogeneous simulation– Every player has their own domain– That domain has the correct tools, etc., for
doing development• There are lots of hard pieces
– Hard for domain-experts to understandmiddleware programming
– Hard for middleware programmers tounderstand domain concepts
– Hard for anyone to install everyone else’stools…
• But, major benefits, if pieces can be integratedeasily
– Allows immediate work on domain-problems,deferring integration work until later
– Permits domain-specific work to use the toolsof the domain
– Showcases the power of code generation(when used by Jedi appropriately)

1911/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation"
Conclusions, and Future Work
• We were able to stand up a significant demo within 3 months of(beginning) to install the software
• Our work concentrated on developing domain-specific pieces toimprove visualization and design-time analysis
• The modeling infrastructure supported our development in theappropriate level of abstraction for future integration
• Future Work– More advanced control algorithms (mesh travel/stability)– More advanced code generation (autogenerate vignette scripts, etc.)

2011/11/08
Electrical and Computer Engineering
Patki, et al. "Integrative Modeling...Heterogeneous Simulation" 2011/11/08
We’re always looking for good graduate students!
http://www.ece.arizona.edu/~sprinkjm/research/c2wt/
Top Related