







Languages
Pages
Legal


Moti relativi
Moto di un punto P osservato da
due sistemi di riferimento, O e O’
O’
x
y
z
O
P
x’
y’
z’
Xu
Yu
zu r
'r
'OO
'r'OOr
Posizioni relative:
Velocità relative:
dt
'rd
dt
'OOd
dt
rd
ZYX uzuyuxr
consideriamo O «fisso» e O’ mobile.
O’ può ruotare rispetto ad O
con
i versori degli assi di O’ possono ruotare

dt
udzu
dt
dz'
dt
udyu
dt
dy'
dt
udxu
dt
dx'vv Z
ZY
YX
XO'
vudt
dz'u
dt
dy'u
dt
dx'ZYX
dove
dt
uxd X
dt
uyd Y
dt
uzd Z
Teorema delle velocità relative. (Dimostrazione facoltativa)
la derivata dei versori vale
rωv'vv O'
Teorema delle velocità relative combinando i risultati:
velocità di trascinamento
(velocità di un punto fermo in O’ nella posizione r’)
XX uω
dt
ud
ecc.
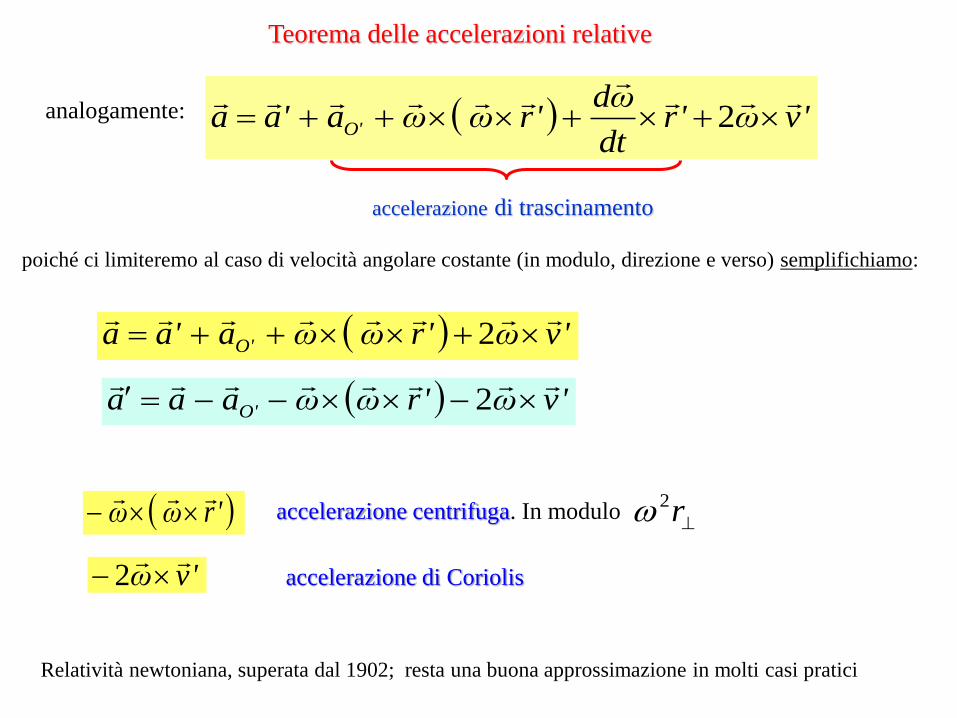
analogamente:
Teorema delle accelerazioni relative
'vω'rdt
ωd'rωωa'aa O'
2
'vω'rωωaaa O'
2
'rωω
'vω
2
accelerazione di trascinamento
r2
Relatività newtoniana, superata dal 1902; resta una buona approssimazione in molti casi pratici
accelerazione di Coriolis
accelerazione centrifuga. In modulo
'vω'rωωa'aa O'
2
poiché ci limiteremo al caso di velocità angolare costante (in modulo, direzione e verso) semplifichiamo:

Velocità e accelerazione di un punto rispetto ad un altro punto
corrispondono alla derivata 1a e 2a rispetto al tempo del vettore P1P2 (che punta da P1 a P2)
12122,1 vvrrdt
dv
12122,1 aavvdt
da
12212,1 rrPPr
O
P1
P2
1r
2r
Velocità e accelerazione del punto P2 rispetto al punto P1:
come si vede sono quantità definite nel riferimento «fisso»
corrispondono a velocità e accelerazione di P2 visti da P1, in assenza di rotazioni

Sistemi di riferimento inerziali e non inerziali
Fam
In un sistema inerziale (O) il moto di un punto materiale è descritto da
in un sistema O’ in moto rispetto ad O
forza apparente o fittizia detta anche forza inerziale
La forza F osservata nel sistema inerziale è una forza «vera» o «reale»
le forze apparenti sono dovute esclusivamente al moto di O’.
Nota: all’osservatore O’ le forze apparenti possono sembrare perfettamente reali (ad es. può
misurarle) e la descrizione del moto ottenuta mediante queste forze è perfettamente consistente.
Moltiplicando per m
sono apparenti nel senso che non sono riconducibili alle interazioni fondamentali, cioè non sono
riconducibili all’interazione fra la massa m e gli altri corpi
'rωω'vωaaa O'
2
'rωω'vωamFam O'
2

Sistemi di riferimento inerziali e non inerziali
'vω'rωωamF O'APP
2
0ω
0'
Oa
le leggi del moto (2a L. di Newton) sono identiche nei due sistemi:
amF
aa
sono nulle se
tutti i sistemi in moto rettilineo uniforme rispetto ad un sistema inerziale sono inerziali
Non solo le leggi del moto sono identiche in tutti i sistemi inerziali, ma si ritiene che valga il
Principio di Relatività
le leggi fisiche sono identiche in tutti i sistemi inerziali
ovvero
non è possibile discriminare fra diversi sistemi inerziali
(ad es. decidere quale è in moto e quale fermo)
le forze apparenti
O’ è in moto uniforme rispetto ad O
il sistema O’ non ruota

Riserratevi con qualche amico nella maggiore stanza che sia sotto coverta di alcun gran navilio, e quivi fate d'aver
mosche, farfalle e simili animaletti volanti; siavi anco un gran vaso d'acqua, e dentrovi de' pescetti; sospendasi anco in
alto qualche secchiello, che a goccia a goccia vadia versando dell'acqua in un altro vaso di angusta bocca, che sia
posto a basso: e stando ferma la nave, osservate diligentemente come quelli animaletti volanti con pari velocità vanno
verso tutte le parti della stanza; i pesci si vedranno andar notando indifferentemente per tutti i versi; le stille cadenti
entreranno tutte nel vaso sottoposto; e voi, gettando all'amico alcuna cosa, non piú gagliardamente la dovrete gettare
verso quella parte che verso questa, quando le lontananze sieno eguali; e saltando voi, come si dice, a piè giunti,
eguali spazii passerete verso tutte le parti. Osservate che avrete diligentemente tutte queste cose, benché niun dubbio
ci sia che mentre il vassello sta fermo non debbano succeder cosí, fate muover la nave con quanta si voglia velocità;
ché (pur che il moto sia uniforme e non fluttuante in qua e in là) voi non riconoscerete una minima mutazione in tutti
li nominati effetti, né da alcuno di quelli potrete comprender se la nave cammina o pure sta ferma: voi saltando
passerete nel tavolato i medesimi spazii che prima, né, perché la nave si muova velocissimamente, farete maggior salti
verso la poppa che verso la prua, benché, nel tempo che voi state in aria, il tavolato sottopostovi scorra verso la parte
contraria al vostro salto; e gettando alcuna cosa al compagno, non con piú forza bisognerà tirarla, per arrivarlo, se egli
sarà verso la prua e voi verso poppa, che se voi fuste situati per l'opposito; le gocciole cadranno come prima nel vaso
inferiore, senza caderne pur una verso poppa, benché, mentre la gocciola è per aria, la nave scorra molti palmi; i pesci
nella lor acqua non con piú fatica noteranno verso la precedente che verso la sussequente parte del vaso, ma con pari
agevolezza verranno al cibo posto su qualsivoglia luogo dell'orlo del vaso; e finalmente le farfalle e le mosche
continueranno i lor voli indifferentemente verso tutte le parti, né mai accaderà che si riduchino verso la parete che
riguarda la poppa, quasi che fussero stracche in tener dietro al veloce corso della nave, dalla quale per lungo tempo,
trattenendosi per aria, saranno state separate; e se abbruciando alcuna lagrima d'incenso si farà un poco di fumo,
vedrassi ascender in alto ed a guisa di nugoletta trattenervisi, e indifferentemente muoversi non piú verso questa che
quella parte. ...
Così si esprimeva Galileo Galilei
Dialogo dei Massimi Sistemi.

0ω
cost'
ov
0
0
0'
COR
CF
o
a
a
a
aa
vvv o
'
1. Trascinamento rettilineo uniforme
ed il moto soddisfa la stessa equazione amF
senza forze apparenti
Tuttavia cambiano le condizioni iniziali '00 ovvv
Esempio. Un oggetto è lasciato cadere in O da un’altezza h, con velocità iniziale nulla. Descrivere il moto
del corpo per l’osservatore O e per un osservatore O’ che ha velocità costante vO’ (orizz.) risp. ad O.
Sistema O
2
2
1
0
gthty
tx
Sistema O’
h h
x
y
00
0
y
ox
v
vv
hy
x
0
0 0
0
0
0
0
y
x
v
v
hy
x
0
0 0
2
2t
ghy
tvx o

Esempio più difficile. Un cannone spara un proiettile con velocità vP=300m/s con alzo 45°. Descrivere
il moto del proiettile come appare ad un osservatore che viaggia a 144 km/h nello stesso verso del lancio
smvv
smvv
Y
X
/212sin
/212cos
00
00
Moto visto da O
mx
g
v
g
vvx
mg
vy
sgvt
G
YXG
Y
Y
9180
2sin2
22902
432
2
000
2
0max
0
Moto visto da O’
smvvv
vv
smvv
smvvv
YX
XY
YY
OXX
/273
9.50atan'
/212
/172
2
0
2
00
00
00
'00
mx
g
v
g
vvx
yy
tt
G
YXG
7450
2sin22
000
maxmax
Notare che per l’osservatore O’ cambia l’angolo di tiro
1. Trascinamento rettilineo uniforme
Ov
0v
'' amamF o
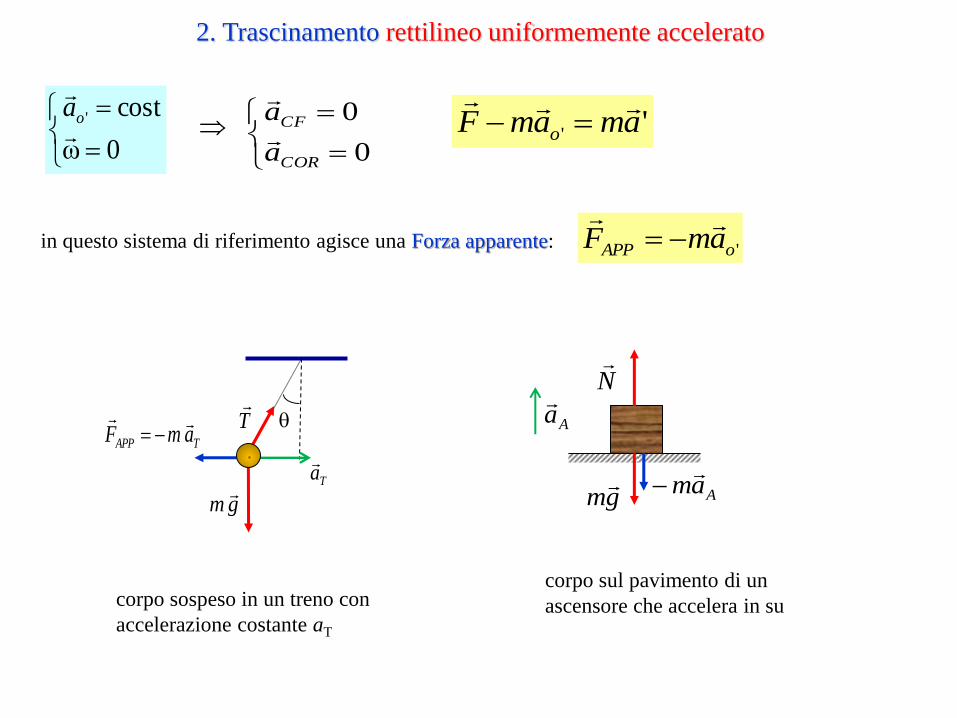
2. Trascinamento rettilineo uniformemente accelerato
0ω
cost'
oa
0
0
COR
CF
a
a
in questo sistema di riferimento agisce una Forza apparente: 'oAPP amF
TAPP amF
T
Ta
gm gm
N
Aa
Aam
corpo sospeso in un treno con
accelerazione costante aT
corpo sul pavimento di un
ascensore che accelera in su

Esempio. Un oggetto è lasciato cadere da y(0)=h in O,
con velocità iniziale nulla. Descrivere il moto osservato
da una persona in moto (sist. O’) con accelerazione
costante ao’ e velocità iniziale vo’ .
Si supponga che i due sistemi concidano per t=0.
2
2'
2
2
tg
hy
ta
x o
g
ao 'tan
2. Trascinamento rettilineo uniformemente accelerato
0ω
cost'
oa
0
0
COR
CF
a
a
in O:
2
2
1
0
gthty
tx
hy
x
0
0 0
0
0
0
0
y
x
v
v
ga
a
y
x 0
in O’:
2
2''
2
1
2
gthty
ta
tvtx oo
hy
x
0
0 0
00
'0
y
ox
v
vv
ga
aa
y
ox '
0' ovSe

Si supponga, per semplicità, che O e O’ (origini degli assi) coincidano:
'2 rdt
ωd'rωω'vωaaa O'
accelerazione
di Coriolis accelerazione
centrifuga
(con centro di rotazione fisso)
cost
0
0
ω
v
a
o'
o'
3. Trascinamento rotatorio uniforme
rr
rmFCF
rmFCF
2Forza centrifuga
oltre alle forze reali, in questo riferimento bisognerà considerare anche
'vωmFCOR
2Forza di Coriolis
vmFCOR 2

Es. 1. Corpo fermo in O. O’ ruota con velocità angolare costante .
Piattaforma girevole
rvaa
rvv
2
con origine fissa
0
0
a
v
ra
rv
moto circolare uniforme
con velocità angolare ω
3. Trascinamento rotatorio uniforme
r
accelerazione centripeta!
T
gm
r
CFF
Es. 2. Pendolo conico
Date m, , , determinare l’angolo .

Assenza di “peso” su un satellite in orbita circolare intorno alla terra.
Dalla Stazione Spaziale Internazionale
g=0?
2
2/7.8 sm
r
MGg
la Stazione Spaziale è in orbita a circa
390km dalla superficie terrestre.
(89% di 9.8m/s2)
r = R+h
Si consideri il Sistema di Riferimento mobile O’
(stazione spaziale), in orbita circolare, non rotante su
sè stesso (=0)
'oa'aa
Per un oggetto lasciato a sè stesso in O’:
aO’ = accelerazione dell’astronave rispetto al sistema inerziale O:
a’ = accelerazione dell’oggettto rispetto al sistema inerziale O:
'' OO rga
'Orga
0'a
quindi sembra che nessuna forza agisca sull’oggetto in O’
approssimazioni

Altri casi di assenza di peso
Se un aereo segue una traiettoria parabolica,
identica a quella che seguirebbe un proiettile
in assenza d’aria
'oa'aa
gao
'
0 a
accelerazione dell’aereo
ga
accelerazione di un oggetto
libero sull’aereo, rispetto al
riferimento fisso (suolo)
Un oggetto lasciato libero sull’aereo che segue una traiettoria “da proiettile” ha accelerazione
nulla rispetto all’aereo. Una persona sull’aereo si trova in condizioni di “assenza di peso”.
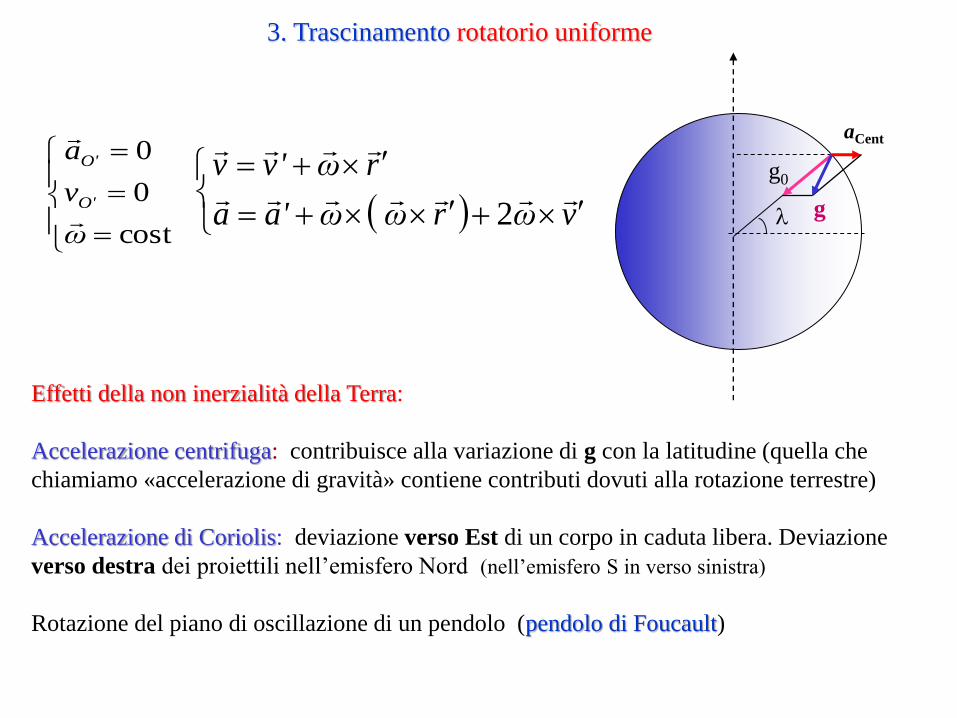
cost
0
0
ω
v
a
O'
O'
vωrωω'aa
rω'vv
2
Effetti della non inerzialità della Terra:
Accelerazione centrifuga: contribuisce alla variazione di g con la latitudine (quella che
chiamiamo «accelerazione di gravità» contiene contributi dovuti alla rotazione terrestre)
Accelerazione di Coriolis: deviazione verso Est di un corpo in caduta libera. Deviazione
verso destra dei proiettili nell’emisfero Nord (nell’emisfero S in verso sinistra)
Rotazione del piano di oscillazione di un pendolo (pendolo di Foucault)
l
g0
aCent
g
3. Trascinamento rotatorio uniforme

Forza di Coriolis: circolazione ciclonica intorno ad un minimo di pressione. Emisfero Nord.
Effetti della non inerzialità della Terra
Top Related