







Languages
Pages
Legal


Summary of part I: prediction and RL
Prediction is important for action selection
• The problem: prediction of future reward
• The algorithm: temporal difference learning
• Neural implementation: dopamine dependent learning in BG
⇒ A precise computational model of learning allows one to look in the brain for “hidden variables” postulated by the model
⇒ Precise (normative!) theory for generation of dopamine firing patterns
⇒ Explains anticipatory dopaminergic responding, second order conditioning
⇒ Compelling account for the role of dopamine in classical conditioning: prediction error acts as signal driving learning in prediction areas

prediction error hypothesis of dopamine
mea
sure
d fir
ing
rate
model prediction error
mea
sure
d fir
ing
rate
Bayer & Glimcher (2005)
at end of trial: δt = rt - Vt (just like R-W)
Vt = η (1−η)t− i ri
i=1
t
∑

Global plan
• Reinforcement learning I:
– prediction
– classical conditioning
– dopamine
• Reinforcement learning II:• Reinforcement learning II:
– dynamic programming; action selection
– Pavlovian misbehaviour
– vigor
• Chapter 9 of Theoretical Neuroscience

Action Selection
• Evolutionary specification• Immediate reinforcement:
– leg flexion– Thorndike puzzle box– Thorndike puzzle box– pigeon; rat; human matching
• Delayed reinforcement:– these tasks– mazes– chess
Bandler;Blanchard

Immediate Reinforcement
• stochastic policy:
• based on action values:
5
RL mm ;

Indirect Actoruse RW rule:
6
25.0;05.0 ==RL p
R
p
L rr switch every 100 trials

Direct ActorRL rRPrLPE ][][)( +=m
][][][
][][][
RPLPm
RPRPLP
m
LPRL
ββ −=∂
∂=∂
∂
( )( )( )[ ] [ ] [ ]L L RE
P L r P L r P R rβ∂ = − +m ( )( )( )[ ] [ ] [ ]L L R
L
EP L r P L r P R r
mβ∂ = − +
∂m
( )( )[ ] ( )L
L
EP L r E
mβ∂ = −
∂m
m
( )( )( ) if L is chosenL
L
Er E
mβ∂ ≈ −
∂m
m
(1 )( ) ( ( ))( )L R L R am m m m r E L Rε ε− → − − + − −m

Direct Actor
8

Could we Tell?
• correlate past rewards, actions with present choice
• indirect actor (separate clocks):
• direct actor (single clock):

Matching: Concurrent VI-VI
Lau, Glimcher, Corrado, Sugrue, Newsome

Matching
• income not return• approximately exponential
in r
• alternation choice kernel

Action at a (Temporal) Distance
x=1
x=2 x=3
x=1
x=2 x=3
12
• learning an appropriate action at x=1:– depends on the actions at x=2 and x=3
– gains no immediate feedback
• idea: use prediction as surrogate feedback

Action Selectionstart with policy: ))()((];[ xmxmxLP RL −= σ
evaluate it: )3(),2(),1( VVV
x=1
x=2 x=3
x=1 x=3x=2
13
improve it:
thus choose R more frequently than L;C δα *m∆
0.025-0.175
-0.1250.125
x=1
x=2 x=3

Policyif 0>δ
• value is too pessimistic• action is better than average
v∆⇒
P∆⇒
x=1 x=3x=2
14

actor/critic
m1
m2
m3
mn
dopamine signals to both motivational & motor striatum appear, surprisingly the same
suggestion: training both values & policies

Formally: Dynamic Programming

Variants: SARSA[ ]CuxxVrECQ tttt ==+= + ,1|)(),1( 1
**
( )),1(),2(),1(),1( CQuQrCQCQ actualt −++→ ε
Morris et al, 2006

Variants: Q learning[ ]CuxxVrECQ tttt ==+= + ,1|)(),1( 1
**
( )),1(),2(max),1(),1( CQuQrCQCQ ut −++→ ε
Roesch et al, 2007

Summary
• prediction learning– Bellman evaluation
• actor-critic– asynchronous policy iteration– asynchronous policy iteration
• indirect method (Q learning)– asynchronous value iteration
[ ]1|)()1( 1** =+= + ttt xxVrEV
[ ]CuxxVrECQ tttt ==+= + ,1|)(),1( 1**

Impulsivity & Hyperbolic Discounting
• humans (and animals) show impulsivity in:– diets– addiction– spending, …
• intertemporal conflict between short and long term choices• often explained via hyperbolic discount functions• often explained via hyperbolic discount functions
• alternative is Pavlovian imperative to an immediate reinforcer
• framing, trolley dilemmas, etc

Direct/Indirect Pathways
• direct: D1: GO; learn from DA increase• indirect: D2: noGO; learn from DA decrease• hyperdirect (STN) delay actions given
strongly attractive choices
Frank

Frank
• DARPP-32: D1 effect• DRD2: D2 effect

Three Decision Makers
• tree search• position evaluation• situation memory

Multiple Systems in RL
• model-based RL– build a forward model of the task, outcomes– search in the forward model (online DP)
• optimal use of information• computationally ruinous• computationally ruinous
• cached-based RL– learn Q values, which summarize future worth
• computationally trivial• bootstrap-based; so statistically inefficient
• learn both – select according to uncertainty

Animal Canary
• OFC; dlPFC; dorsomedial striatum; BLA?• dosolateral striatum, amygdala

Two Systems:

Behavioural Effects

Effects of Learning
• distributional value iteration• (Bayesian Q learning)
• fixed additional uncertainty per step

One Outcome
shallow treeimpliesgoal-directedcontrolwins

Human Canary...a b
• if a → c and c → £££ , then do more of a or b?– MB: b– MF: a (or even no effect)
c

Behaviour
• action values depend on both systems:
• expect that will vary by subject (but be fixed)
( ) ),(),(, uxQuxQuxQ MBMFtot β+=β

Neural Prediction Errors (1→2)
R ventral striatum
• note that MB RL does not use this prediction error – training signal?
R ventral striatum
(anatomical definition)

Neural Prediction Errors (1)
• right nucleus accumbens
behaviour
1-2, not 1

Vigour
• Two components to choice:– what:
• lever pressing• direction to run
34
• direction to run• meal to choose
– when/how fast/how vigorous• free operant tasks
• real-valued DP

The model
τ
cost
LP
NP
?
how fast τ
VC
vigour cost
UC
unit cost(reward)
UR
PR
35
choose(action,ττττ) = (LP,τ1)
ττττ1 time
CostsRewards
choose(action,ττττ)= (LP,τ2)
CostsRewards
Other
ττττ2 timeS1 S2S0
goal

The model
Goal: Choose actions and latencies to maximize the average rate of return (rewards minus costs per time)
36
choose(action,ττττ) = (LP,τ1)
ττττ1 time
CostsRewards
choose(action,ττττ)= (LP,τ2)
CostsRewards
ττττ2 timeS1 S2S0
ARL

Compute differential values of actions
Differential value of taking action L
with latency τwhen in state x
ρ = average rewards
minus costs, per unit time
Average Reward RL
37
• steady state behavior (not learning dynamics)
(Extension of Schwartz 1993)
QL,τ(x) = Rewards – Costs + Future Returns
)'(xV
τρ−v
uCC τ+

⇒ Choose action with largest expected reward minus cost
1. Which action to take?
• slow → delays (all) rewards2.How fast to perform it?
• slow → less costly (vigour
Average Reward Cost/benefit Tradeoffs
38
• slow → delays (all) rewards
• net rate of rewards = cost of delay (opportunity cost of time)
⇒ Choose rate that balances vigour and opportunity costs
• slow → less costly (vigour cost)
explains faster (irrelevant) actions under hunger, etc
masochism

0 0.5 1 1.50
0.2
0.4pr
obab
ility
0 20 400
10
20
30
rate
per
min
ute
1st NPLP
Optimal response rates
Exp
erim
enta
l dat
aNiv, Dayan, Joel, unpublished1st Nose poke
39
0 0.5 1 1.5 0 20 40 Exp
erim
enta
l dat
a
seconds since reinforcement
Mod
el s
imul
atio
n
1st Nose poke
seconds since reinforcement0 0.5 1 1.5
0
0.2
0.4
prob
abili
ty
0 20 400
10
20
30ra
te p
er m
inut
e
seconds
seconds

Optimal response rates
Model simulation
50
% R
esp
on
ses
on
leve
r A Model
Perfect matching
100
80
60
Pigeon APigeon BPerfect matching
% R
esp
on
ses
on
key
A
Experimental data
40
500
0% Reinforcements on lever A
% R
esp
on
ses
on
leve
r A
0 20 40 60 80 100
40
20
% Reinforcements on key A
% R
esp
on
ses
on
key
A
Herrnstein 1961More:• # responses• interval length• amount of reward• ratio vs. interval• breaking point• temporal structure• etc.

Effects of motivation (in the model)RR25
RxVC
CRpuxQ vur ⋅−+−−= τττ )'(),,(
0),,(
2=−=
∂∂
RCuxQ v
τττ
opt
vopt
R
C=ττττ
41
low utilityhigh utility
mea
n la
ten
cy
LP Other
energizing effect
∂ ττ optR

Effects of motivation (in the model)re
spo
nse
rat
e / m
inu
te
RR25
resp
on
se r
ate
/ min
ute
directing effect1
42
UR 50%
resp
on
se r
ate
/ min
ute
seconds from reinforcement
resp
on
se r
ate
/ min
ute
seconds from reinforcement
low utilityhigh utility
mea
n la
ten
cy
LP Other
energizing effect
2

Phasic dopamine firing = reward prediction error
Relation to Dopamine
43
What about tonic dopamine?moreless

Tonic dopamine = Average reward ratem
inu
tes
2000
2500Control
DA depleted
800
1000
1200
30 m
inu
tes Control
DA depleted
1. explains pharmacological manipulations
2. dopamine control of vigour through BG pathways
44NB. phasic signal RPE for choice/value learning
Aberman and Salamone 1999
# L
Ps
in 3
0 m
inu
tes
1 4 16 64
500
1000
1500
1 4 8 160
200
400
600
Model simulation
# L
Ps
in 3
0 m
inu
tes
• eating time confound• context/state dependence (motivation & drugs?)• less switching=perseveration

Tonic dopamine hypothesis
…also explains effects of phasic dopamine on response times
$ $ $ $ $ $♫ ♫ ♫ ♫ ♫♫
45 Satoh and Kimura 2003 Ljungberg, Apicella and Schultz 1992
reaction time
firin
g ra
te
…also explains effects of phasic dopamine on response times

Sensory Decisions as Optimal Stopping
• consider listening to:
• decision: choose, or sample• decision: choose, or sample

Optimal Stopping
• equivalent of state u=1 is 11 nu =
• and states u=2,3 is ( )212 2
1nnu +=
2.5
0.1Cr
σ =
= −

Transition Probabilities

Computational Neuromodulation
• dopamine– phasic: prediction error for reward– tonic: average reward (vigour)
• serotonin• serotonin– phasic: prediction error for punishment?
• acetylcholine:– expected uncertainty?
• norepinephrine– unexpected uncertainty; neural interrupt?

Conditioning
• Ethology– optimality– appropriateness
• Computation– dynamic progr.– Kalman filtering
prediction: of important eventscontrol: in the light of those predictions
50
– appropriateness
• Psychology– classical/operant
conditioning
– Kalman filtering
• Algorithm– TD/delta rules– simple weights
• Neurobiologyneuromodulators; amygdala; OFCnucleus accumbens; dorsal striatum

class of stylized tasks withstates, actions & rewards
– at each timestep t the world takes on state st and delivers reward rt, and the agent chooses an action at
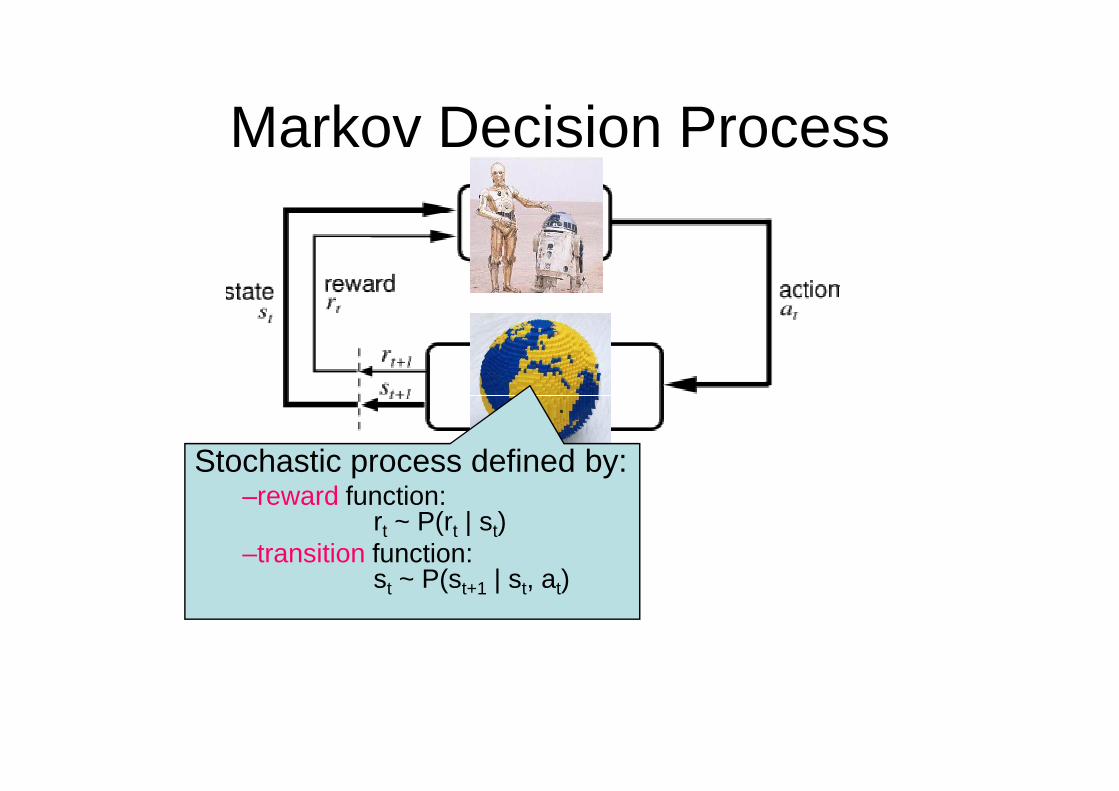
Markov Decision Process

World: You are in state 34.Your immediate reward is 3. You have 3 actions.
Markov Decision Process
Your immediate reward is 3. You have 3 actions.Robot: I’ll take action 2.
World: You are in state 77.Your immediate reward is -7. You have 2 actions.
Robot: I’ll take action 1.
World: You’re in state 34 (again).Your immediate reward is 3. You have 3 actions.
Markov Decision Process
Stochastic process defined by:–reward function:
rt ~ P(rt | st)–transition function:
st ~ P(st+1 | st, at)

Markov Decision Process
Stochastic process defined by:–reward function:
rt ~ P(rt | st)–transition function:
st ~ P(st+1 | st, at) Markov property–future conditionally independent of past, given st

The optimal policy
Definition: a policy such that at every state, its expected value is better than (or equal to) that of all other policies
Theorem: For every MDP there exists (at least) Theorem: For every MDP there exists (at least) one deterministic optimal policy.
� by the way, why is the optimal policy just a mapping from states to actions? couldn’t you earn more reward by choosing a different action depending on last 2 states?

Pavlovian & Instrumental Conditioning
• Pavlovian– learning values and predictions– using TD error
• Instrumental• Instrumental– learning actions:
• by reinforcement (leg flexion)• by (TD) critic
– (actually different forms: goal directed & habitual)

Pavlovian-Instrumental Interactions
• synergistic– conditioned reinforcement– Pavlovian-instrumental transfer
• Pavlovian cue predicts the instrumental outcome• behavioural inhibition to avoid aversive outcomes• behavioural inhibition to avoid aversive outcomes
• neutral– Pavlovian-instrumental transfer
• Pavlovian cue predicts outcome with same motivational valence
• opponent– Pavlovian-instrumental transfer
• Pavlovian cue predicts opposite motivational valence
– negative automaintenance

-ve Automaintenance in Autoshaping
• simple choice task– N: nogo gives reward r=1– G: go gives reward r=0
• learn three quantities• learn three quantities– average value– Q value for N – Q value for G
• instrumental propensity is

-ve Automaintenance in Autoshaping
• Pavlovian action– assert: Pavlovian impetus towards G is v(t)– weight Pavlovian and instrumental advantages by ω –
competitive reliability of Pavlov
• new propensities
• new action choice

-ve Automaintenance in Autoshaping
• basic –ve automaintenance effect (µ=5)
• lines are theoretical • lines are theoretical asymptotes
• equilibrium probabilities of action
Top Related