







Languages
Pages
Legal


0
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA
CAMPUS FLORIANÓPOLIS
DEPARTAMENTO ACADÊMICO DE ELETRÔNICA CURSO SUPERIOR DE TECNOLOGIA
EM SISTEMAS ELETRÔNICOS
ANA CARLA SANTOS
SISTEMA PARA AUTOMAÇÃO DE AMBIENTES
FLORIANÓPOLIS, 2010

i
ANA CARLA SANTOS
SISTEMA PARA AUTOMAÇÃO DE AMBIENTES
Trabalho de Conclusão de Curso submetido ao Instituto Federal de Educação, Ciência e Tecnologia de Santa Catarina como parte dos requisitos para obtenção do título de Tecnólogo em Sistemas Eletrônicos. Professor Orientador: Muriel B. de Liz, Dr.Eng Coorientador: Everton L. F. dos Santos, M.Eng.
FLORIANÓPOLIS, 2010

ii
SISTEMA PARA AUTOMAÇÃO DE AMBIENTES
ANA CARLA SANTOS Este trabalho foi julgado adequado para obtenção do Título de Tecnólogo em Sistemas Eletrônicos e aprovado na sua forma final pela banca examinadora do Curso Superior de Tecnologia em Sistemas Eletrônicos do Instituto Federal de Educação, Ciência e Tecnologia de Santa Catarina.
________________________________ Muriel Bittencourt de Liz, Dr.Eng
Orientador
________________________________ Everton L. F. dos Santos, M.Eng.
Coorientador
________________________________ Cláudia R. Silveira,
Orientadora de Metodologia
Banca Examinadora:
_______________________________ André Luís Dalcastagnê, Dr.Eng.
_______________________________ Prof. Joel Lacerda, Dr.

iii
Dedico este trabalho a todos aqueles que contribuíram para sua
realização e aos meus familiares em especial.

iv
AGRADECIMENTOS
Agradeço primeiramente a Deus pelo dom da vida e por me proporcionar paz e
serenidade para enfrentar os obstáculos e superar os desafios.
A minha família e, sobretudo aos meus pais, Carlos Henrique Santos e Claudilene
Nalzita Melo Santos por todos os anos de incentivo, força e ensinamentos.
Ao meu namorado Fabionei, pelo carinho, incentivo e apoio sempre demonstrados.
Aos meus amigos, em especial a Manoela, que se fazem tão presentes no meu dia a
dia, pela amizade e companheirismo de estudo e por ter me ajudado tanto ao longo da
graduação.
Aos professores do Departamento de Eletrônica, em especial ao meu orientador,
Muriel, ao meu coorientador Everton e à professora Cláudia, por acreditarem em mim e por
tantas vezes terem me incentivado e me acompanhado ao longo do curso.
Ao Durval que me deu a oportunidade de participar no desenvolvimento deste projeto,
e que sempre esteve disposto para solucionar todas as minhas dúvidas, com o qual aprendi
muito.
A toda equipe da ONEON, que apoiaram na elaboração deste trabalho de conclusão
de curso, sempre estando presentes para os meus questionamentos e dúvidas.
A todos que contribuíram direta ou indiretamente para a realização deste trabalho.

v
O segredo é não correr atrás das borboletas.. É cuidar do jardim para que elas venham até você.
Mário Quintana

vi
SANTOS, Ana Carla . Sistema para Automação de Ambientes, 2010. Trabalho de Conclusão de Curso de Graduação Tecnológica em Sistemas Eletrônicos, Instituto Federal de Educação, Ciência e Tecnologia de Santa Catarina. 91 páginas
RESUMO
A automação pode ser definida de maneira simplificada, como sendo qualquer sistema que substitua ou facilite o trabalho humano por meio de soluções práticas e rápidas. Na busca desta praticidade é que surgiram, em meados da década de 70, os princípios da domótica, consistindo, assim, em um novo conceito e estilo de vida. O objetivo deste trabalho foi o de participar do desenvolvimento de um sistema de automação residencial composto por um controle remoto, um módulo acionador e um receptor infravermelho, dando suporte na etapa de desenvolvimento de processo, na montagem de placas de circuito impresso e nos testes funcionais. A pesquisa foi realizada no setor de Engenharia Industrial do LABelectron- Fundação CERTI, no período de agosto de 2009 a junho de 2010, seguindo os preceitos da pesquisa quantitativa do tipo exploratória. Os sujeitos envolvidos na pesquisa foram engenheiros elétricos, estagiários e cliente do produto. Os resultados dos testes concluem o desenvolvimento do projeto, nos quais são apresentados dados como: consumo da bateria, sensibilidade do teclado, segurança e interruptor pulsador.
Palavras-Chave: automação, controle, módulo, receptor.

vii
SANTOS, Ana Carla . System Automation Environments, 2010. Completion of Course Work for Graduate Technology in Electronic Systems, Federal Institute of Education, Science and Technology of Santa Catarina, 91 pages.
ABSTRACT
Automation can be defined simply, as any system, to replace or facilitate human work through practical solutions and fast. In pursuit of this convenience is that arose in the mid-70s to the principles of home automation, thus constituting, in a new concept and lifestyle. The objective was to participate in the development of a home automation system comprising a remote control, an actuator module and an infrared receiver, supporting the development stage of the process, the assembly of printed circuit boards and functional tests. The research was performed in the Industrial Engineering Foundation CERTI-LABelectron in the period August 2009 to June 2010, following the precepts of the quantitative research of the exploratory type. The subjects involved in the research were electrical engineers, trainees and client product. The test results conclude the project development, in which data are presented as battery consumption, sensitivity of the keyboard, and safety push button switch. Keywords: automation, control, module, receiver.

viii
LISTA DE FIGURAS
FIGURA 01 - Modelo de automação em uma planta residencial.................................26
FIGURA 02- Estrutura de comando do controle remoto..............................................27
FIGURA 03- Estrutura de comando módulo acionador...............................................28
FIGURA 04- Diagrama do controle remoto.................................................................29
FIGURA 05 – Bateria CR2032.....................................................................................30
FIGURA 06- Circuito transferidor de carga ................................................................31
FIGURA 07- Peça metálicas para acionamento do circuito transferidor de carga.......32
FIGURA 08- Sensor de toque capacitivo.....................................................................33
FIGURA 09- Diagrama do QT1081..............................................................................34
FIGURA 10- Oito chaves capacitivas...........................................................................35
FIGURA 11- Hardware do microcontrolador do controle remoto...............................37
FIGURA 12- Pontos de gravação do controle remoto..................................................38
FIGURA 13- Dispositivo para gravação do microcontrolador do controle remoto......39
FIGURA 14- Estrutura do firmware do microcontrolado do controle remoto............40
FIGURA 15- Protocolo ONEON Home do controle remoto.........................................41
FIGURA 16- Teclas de ações e funções do controle remoto........................................42
FIGURA 17- Led backlight...........................................................................................43
FIGURA 18- Sinalização de função. ............................................................................44
FIGURA 19- Sinalização de transmissão......................................................................45
FIGURA 20 Modulador PWM.....................................................................................46
FIGURA 21- Diagrama do módulo acionador..............................................................48
FIGURA 22- Retificação em ponte de diodos..............................................................49
FIGURA 23 – Conversor buck......................................................................................50
FIGURA 24- Fonte de alimentação sem transformador..............................................52
FIGURA 25- Circuito de sincronismo com a rede........................................................53
FIGURA 26-Símbolo do optoacoplador.......................................................................54
FIGURA 27- Optoacoplador utilizado no módulo acionador.......................................55
FIGURA 28- Símbolo do triac......................................................................................56
FIGURA 29 Circuito equivalente ao triac..................................................................56
FIGURA 30- Curva característica do triac...................................................................57
FIGURA 31- Formas de ondas do disparo do triac......................................................58

ix
FIGURA 32- Circuito de potência................................................................................59
FIGURA 33- Hardware do microcontrolador do módulo acionador...........................60
FIGURA 34- Pontos de gravação do módulo acionador...............................................61
FIGURA 35- Dispositivo para gravação do microcontrolador do módulo acionador..62
FIGURA 36- Estrutura do firmware do microcontrolador do módulo acionador.......63
FIGURA 37- Protocolo ONEON Home do módulo acionador.....................................64
FIGURA 38- Características de temperatura bateria CR2032......................................69
FIGURA 39- Teste de alcance do led..........................................................................71
FIGURA 40 - Ajuste da sensibilidade do teclado : placa nua.......................................72
FIGURA 41- Ajuste da sensibilidade do teclado : gabinete........................................73
FIGURA 42- Botão reset do controle remoto...............................................................74
FIGURA 43- Botão reset do receptor infravermelho....................................................75
FIGURA 44- Jiga de testes: lâmpada............................................................................77
FIGURA 45 - Controle remoto....................................................................................79
FIGURA 46 - Módulo acionador.................................................................................80
FIGURA 47 - Receptor infravermelho.........................................................................80

x
LISTA DE ABREVIATURAS
A – Ampere.
AC – Alternating Current.
C – Carga 1.
CR- Carga 2.
Cs- Capacitor
C- Capacitor.
D- Diodo.
DC- Direct Current.
Dr. – Doutorado .
Eng – Engenharia.
F – Fusível.
G – Gate.
GND- Terra.
http – Hypertext Tranfor Protocol.
ISP-Interface Segregation Principle.
IR – Infravermelho.
I/0 – Entrada e Saída.
In- Corrente Nominal.
Isb – Corrente Stand By.
Itx- Corrente Transmissão.
kHz- Kilohertz.
L- Indutor.
M – Mestrado.
MHz – Megahertz.
MΩ - Megaohms.
MIPS- Milhões de Instruções por Segundo.
MT1 – Anodo 1.
MT2-Anodo 2.
MISO- Saída Serial do Microcontrolador.
MOSI- Entrada Serial do Microcontrolador.
mW – Milewats.

xi
mAh- Mileamper Hora.
ms- Milisegundos.
nF- Nanofaraday.
uC – Microcontrolador.
uA- Microampere.
ON- Ligado.
OFF- Desligado.
p – Página.
PWM- Pulse-Width Modulation.
PCI – Placa de Circuito Impresso.
Q –Transistor.
R- Resistor.
SCK- Modo de Interface Serial Universal para Clock.
SIC – Sincronismo.
TCC –Trabalho de Conclusão de Curso.
Triac – Triode for Alternating Current
USI – Universal Serial Interface.
V- Volt .
VCC- Alimentação.

12
SUMÁRIO
RESUMO....................................................................................................................vi ABSTRACT...............................................................................................................vii LISTA DE FIGURAS..............................................................................................viii LISTA DE ABREVIATURAS...................................................................................x 1 INTRODUÇÃO......................................................................................................14 1.1 Justificativa...........................................................................................................15 1.2 Definição do problema..........................................................................................15 1.3 Objetivo geral........................................................................................................16 1.4 Objetivos específicos............................................................................................16 2 DOMÓTICA – TECNOLOGIAS E CONCEITOS...........................................18 2.1 Equipamentos automatizados direcionados a automação residencial...................20 2.2 Funções da domótica.............................................................................................21 2.3 Custos de uma Automação Residencial................................................................24 3 SISTEMA DE AUTOMAÇAO DE AMBIENTES............................................27 4 CONTROLE REMOTO ......................................................................................29 4.1 Bateria...................................................................................................................30 4.2 Circuito integrado transferidor de carga...............................................................30 4.3 Sensor de toque capacitivo....................................................................................32 4.3.1 QT1081..............................................................................................................33 4.4 Microcontrolador do controle remoto..................................................................36 4.4.1 Hardware do microcontrolador do controle......................................................37 4.4.2 Firmware do microcontrolador do controle.......................................................39 4.5 Modulador PWM e circuito de transmissão.........................................................45 5 MÓDULO ACIONADOR.....................................................................................48 5.1 Fontes de alimentação...........................................................................................48 5.1.1 Fonte alimentação sem transformador...............................................................51 5.2 Circuito de sincronismo........................................................................................53 5.3 Circuito de potência..............................................................................................54 5.3.1 Optoacoplador....................................................................................................54 5.3.2 Triac...................................................................................................................56 5.4 Microcontrolador do módulo acionador...............................................................59 5.4.1Hardware do microcontrolador do módulo acionador.......................................59 5.4.2 Firmware do microcontrolador do módulo.......................................................62 6 METODOLOGIA..................................................................................................65 6.1 Métodos aplicados................................................................................................66 7 TESTES E RESULTADOS...................................................................................68 7.1 Testes e resultados do controle remoto.................................................................68 7.1.1 Consumo............................................................................................................68 7.1.2 Alcance..............................................................................................................70 7.1.3 Sensibilidade do teclado....................................................................................72 7.1.4 Sensibilidade wake up........................................................................................73 7.1.5 Inserção de senha...............................................................................................74 7.2 Teste e resultados do módulo acionador..............................................................76 7.2.1 Segurança...........................................................................................................76 7.2.2 Condições agressivas (calor)..............................................................................77

13
7.2.3 Interruptor pulsador...........................................................................................78 8 PRODUTO FINAL................................................................................................79 9 CONSIDERAÇÕES FINAIS................................................................................81 REFERÊNCIAS........................................................................................................83 BIBIOGRAFIA COMPLEMENTAR.....................................................................85 ANEXOS....................................................................................................................86 ANEXO A- Módulo Acionador e Controle Remoto..................................................87 ANEXO B – Jiga de testes do controle remoto.........................................................88 ANEXO C-Jiga de testes do módulo acionador: conexão com lâmpadas..................89 ANEXO D- Jiga de testes do módulo acionador: conexão com ar condicionado......90 ANEXO E- Jiga de testes do módulo acionador: conexão com ventilador................91

14
1 INTRODUÇÃO
A Automação Residencial inicialmente é referenciada como uma novidade que, às
vezes causa perplexidade pelo seu alto grau tecnológico e pela alusão ao futurismo, ao
mesmo tempo que pode ser compreendida como um símbolo de status e modernidade.
Segundo José Cândido Forti, presidente da AURESIDE, transformar casas em
confortáveis refúgios capazes de oferecer segurança e economia de custos é uma das
vantagens da automação residencial. O que antes parecia ser um privilégio de poucos,
começa a se difundir nos empreendimentos residenciais e prediais de médio nível,
transformando o conceito de casa do futuro em casa do presente .
A domótica, também conhecida pelos termos “Casa Inteligente”, “Smart Building”,
“Casa Automatizada”, “Automação Residencial”, e que se relaciona diretamente com o
termo “Automação”, é uma filosofia de uma nova aplicação tecnológica para automação de
residências. Seu objetivo é satisfazer as necessidades básicas dos ocupantes de uma
edificação: melhorar a qualidade de vida, proporcionar redução do trabalho doméstico,
aumentar o bem-estar e a segurança de seus habitantes e proporcionar a utilização racional e
planejada dos diversos meios de consumo. Assim, o próprio sistema zela pela segurança dos
moradores da residência, sem que seja necessária a intervenção direta dos mesmos.
Para ter uma melhor compreensão da domótica, faz-se necessária, neste trabalho,
uma breve explanação sobre a automação, capítulo 2, já que os termos domótica e
automação residencial são considerados sinônimos ou equivalentes.
A automação é qualquer sistema que substitua ou facilite o trabalho humano por
meio de soluções práticas e rápidas. Na busca desta praticidade, este trabalho tem como
objetivo acompanhar o desenvolvimento de um sistema de automação de ambientes,
composto por um controle remoto, um módulo acionador e receptor, auxiliando em todas as
etapas de desenvolvimento.
No terceiro capítulo, há uma explicação das etapas que serão seguidas para o
desenvolvimento do projeto, mostrando os fluxogramas do controle remoto e do módulo
acionador. No quarto e quinto capítulos, serão explicados respectivamente, todos os blocos
que irão compor o controle remoto e o módulo acionador, contendo fluxogramas e figuras
ilustradas. No sexto capítulo serão realizados testes relatando os resultados alcançados e,
finalmente, o sétimo capítulo mostrará as figuras do produto final divididas em controle
remoto, módulo acionador e receptor.

15
A abrangência do tema automação, bem como tendências mercadológicas na esfera
tecnológica, faz despertar o interesse pela pesquisa sobre o tema, como elo de aproximação
das ciências envolvidas, promovendo, assim, a interação entre tecnologia e as atividades
ligadas ao nosso cotidiano.
1.1 Justificativa
A automação está presente para facilitar as atividades exercidas tanto no ambiente
de trabalho quanto no doméstico. Isso se deve ao fato de que a população está cada vez com
menos tempo disponível, mas sempre preocupada com a segurança e com a economia dos
recursos. Com o propósito de buscar soluções para esse tipo de necessidade e facilitar nosso
modo de vida é que surgiu a domótica. Esse termo foi criado para designar a integração de
tecnologias e serviços aplicados a domicílios, escritórios e pequenos edifícios buscando o
aumento de segurança, conforto e economia de energia.
Segundo Abreu (2003), o objetivo da automação residencial em locais de trabalho
de pequeno porte é integrar iluminação, entretenimento, segurança, telecomunicações,
aquecimento, ar condicionado e muito mais através de um sistema inteligente e programável.
Como consequência, fornecer praticidade, segurança, conforto e economia para os usuários.
Além do aprendizado dessa tecnologia, a outra grande motivação para a escolha
deste tema foi a oportunidade de acompanhamento de um projeto a ser desenvolvido dentro
do LABelectron – Fundação CERTI (Centros de Referência em Tecnologias Inovadoras).
Temos a devida autorização do cliente que financiará o trabalho de pesquisa e
desenvolvimento desse sistema. Assim, unindo os conhecimentos adquiridos no decorrer do
curso com a experiência dos profissionais do LABelectron é que se desenvolverá este
trabalho, com o propósito de inovar o meio de interação das pessoas com o ambiente.
1.2 Definição do problema
Atualmente, quando se fala no termo domótica, depara-se com uma modalidade de
automação que visa solucionar problemas de situações cotidianas. Mas qual a importância
de se ter um sistema automatizado?

16
Para responder a essa pergunta é interessante considerar que, além de maximizar
tempo, promovendo inúmeros benefícios diretamente ligados à segurança física dos
habitantes e do patrimônio, o objetivo da automação é substituir ou facilitar o trabalho
humano por meio de soluções práticas e rápidas. Assim, neste trabalho, o usuário poderá
controlar o acionamento de luzes, ventiladores e outros aparelhos eletro-eletrônicos através
de um controle remoto.
Porém, será que é possível desenvolver um sistema de automação cujo
interfaceamento com o usuário seja feito de modo mais intuitivo comparado aos modelos
atuais?
Para responder tal pergunta será necessário obter um sistema automatizado com
características exclusivas e melhorias com relação aos produtos similares no mercado,
tomando alguns cuidados específicos de layout do teclado capacitivo, ajustando a
sensibilidade do teclado. Além disso, será necessário elaborar um circuito de baixíssimo
consumo, visando utilizar baterias mais leves e compactas. A personalização do controle, a
fim de que apenas usuários habilitados comandem o sistema também é outro ponto a ser
considerado e a capacidade de aumentar a corrente fornecida pelo módulo para níveis
superiores ao dos equipamentos similares é importante para se ter um sistema apropriado
1.3 Objetivo geral
O objetivo deste trabalho é participar do desenvolvimento de um sistema de
automação residencial composto por um controle remoto, um módulo acionador e um
receptor infravermelho, dando suporte na etapa de desenvolvimento de processo, na
montagem de placas de circuito impresso e nos testes funcionais
1.4 Objetivos específicos
Para o trabalho proposto estabeleceram-se os seguintes objetivos específicos:
Utilizar a tecnologia de células capacitivas.
Realizar modulação de sinais digitais.

17
Transmitir pacotes de dados através de sinais infravermelhos.
Elaborar um controle com design próprio para porte em bolsos.
Desenvolver um módulo compatível com o controle.
Analisar e validar os resultados obtidos.
18
2 DOMÓTICA – TECNOLOGIAS E CONCEITOS
Domótica é a integração de tecnologias e serviços, aplicadas a lares, escritórios e
pequenos prédios, com o objetivo de automatizar e obter maior conforto e comodidade,
comunicação, economia de energia e aumento da segurança.
A origem do termo domótica, vem da difusão da palavra latina domus (casa),com a
palavra telemática (sobretudo robótica). Fi adotado na Europa para designar o campo de
aplicação tecnológica que visa a integração do espaço arquitetônico, da informática e das
telecomunicações; já nos Estados Unidos e Japão adotou-se a expressão “intelligent
building” .
O objetivo da automação residencial é integrar iluminação, entretenimento, segurança, telecomunicações, condicionamento de ar, e muito mais através de um sistema inteligente, programável e centralizado. Pode ser feito de três formas: Sistemas interligados pela própria rede elétrica existente (...). Sistemas integrados por um controle remoto universal, possibilitando o controle de qualquer equipamento dotado de controle remoto por infravermelho. Sistemas integrados por central de automação, este é o sistema mais avançado e que tem a maior autonomia e depende de um projeto específico (CORCUERA CAVALCANTI, 2006).
Segundo Angel (1993, p.43), a domótica é um novo domínio de aplicação
tecnológica, tendo como objetivo básico melhorar a qualidade de vida, reduzindo o trabalho
doméstico, aumentando o bem estar e a segurança de seus moradores e visando também a
utilização racional e planejada dos diversos meios de consumo. A domótica procura uma
melhor integração através da automatização nas áreas de segurança, comunicação, e de
controle e gestão de fluídos.
De acordo com Abreu (2003), o sistema de automação residencial se dividem em três
tipos:
a) sistemas autômatos(stand alone): são divididos módulos entre os cômodos, onde
cada um pode ser transmissor ou receptor e os módulos (que podem estar
controlando luzes);
b) sistemas integrados com controle centralizado: a central é inteligente, as
19
configurações podem ser simples ou complexas, inclui ações ativadas por eventos,
equipamentos controlados via infravermelho podem ser programados pela central;
c) sistemas de automação complexos: integração total dos sistemas domésticos, a
residência precisa ser projetada para essa automação, cabeamento estruturado.
A utilização da domótica pode apresentar inúmeras vantagens, das quais destacam-se
as seguintes:
• Segurança - permite a detecção e alarme em caso de invasão de domicílio, a
dissuasão através de sirene de alarme ou de sistema de luzes, a marcação de um
número de telefone exterior, a simulação da presença dos moradores, através de
dispositivos elétricos, tais como luzes, rádio e outros.
• Gestão de energia - otimização do consumo de energia graças, por exemplo, à
programação do aquecimento ou da climatização, tanto no interior como no exterior,
seleção das zonas a aquecer tais como máquinas de lavar ou sistemas de iluminação, de
acordo, por exemplo, com horários de baixa taxação (com evidentes vantagens, quer
para consumidores, quer para fornecedores).
• Conforto - controle de luzes de acordo com a luminosidade necessária, programação
de regra automática, controle de aquecimento, de eletrodomésticos, etc.
As referidas vantagens ganham maior acuidade nos casos de pessoas que apresentam
problemas de mobilidade, tais como idosos ou portadores de necessidades especiais.
Com a alteração dos padrões de vida, a domótica encontrou outras áreas onde poderá
ser útil, aumentando o número de pessoas para quem se poderá tornar uma mais valida:
despreocupação para pessoas que viajam constantemente ou mais autonomia a pessoas com
necessidades especiais são apenas alguns exemplos. Dotar as casas com soluções
tecnológicas que permitam a independência relativamente a terceiros, é um benefício que
não é mensurável. Permitir que as tarefas domésticas fossem executadas de uma forma
simples e acessível a pessoas idosas, com problemas de mobilidade ou com necessidades
especiais, vem oferecer um maior conforto e melhorar a qualidade de vida. Pequenos gestos

20
do cotidiano, tal como controlar a iluminação, acionar aparelhos, a partir de uma diferente
localização dentro de casa, assim, como acionar mecanismo de alerta quando um imprevisto
surgir e a segurança destas pessoas estiver posta em causa.
A força e a essência da domótica reside na conjugação dos diversos itens descritos.
Para alguns pode ser tão simples quanto controlar a iluminação ou os aparelhos de sua casa,
a partir do mesmo comando que utiliza para a TV. Para outros, é uma casa completamente
automatizada que é controlado por uma interface de computador, completamente
programado para se adaptar ao seu estilo de vida. O seu sistema de domótica pode ficar
encarregue de todas as tarefas complicadas.Apenas a imaginação pode limitar as
potencialidades que a domótica tem para lhe oferecer.
2.1 Equipamentos automatizados direcionados a automação residencial
A automação pode trazer as vantagens, inerentes ao seu desempenho e aplicação:
• Repetibilidade – processos mais uniformes.
• Flexibilidade – alterações mais rápidas na produção.
• Aumento da produção - através do melhor aproveitamento do tempo e aumento da
velocidade de operação de máquinas e processos.
• Valorização do ser humano - com a sua substituição em trabalhos repetitivos
executados em longos períodos, com exaustão física e psicológica, em trabalhos
perigosos e em ambientes agressivos.
Como a automação pode acontecer em vários níveis de sofisticação técnica, pode-se
encontrar aplicações que vão desde um controle de parâmetros dimensionais de elevada
precisão, como controle de coordenadas em usinagem, medição de parâmetros dimensionais
de peças e ferramental, onde é necessária a utilização de sistemas computacionais
sofisticados que executam programas especialistas; até o uso de sistemas sem a inclusão de
21
técnicas de controle sofisticadas, com a aplicação de um lógica de automação simples onde
o uso de programas e sistemas de programação simples e de uso geral.
Até o início da década de 60, a utilização de reles eletromecânicos era praticamente a
única opção para automação. Com o aparecimento dos microprocessadores, surgem os
controladores lógicos programáveis, onde a forma básica de programação vem da lógica da
programação dos diagramas elétricos a relês, operando apenas variáveis digitais, efetuando
controle discreto. Na manipulação de variáveis analógicas tais equipamentos são chamados
de controladores programáveis.
O controlador lógico programável tem como função principal substituir as
tradicionais lógicas eletro-mecânica, elaboradas através de relés, contatores, fios e outros
elementos eletromecânicos que geram uma programação fixa que só é passível de se
modificar ou alterar se um novo circuito for elaborado, construído e as mudanças físicas no
projeto sejam executadas.
2.2 Funções da domótica
Segundo Angel (1993), as funções de domótica nos permitem satisfazer a um número
considerável de necessidades (citadas anteriormente). São definidas três classes expressivas
de funções, segundo o tipo de “serviço” a que elas se dirigem, as quais se dividem em sub-
funções:
a) Função de gestão: a função de gestão tem por objetivo automatizar um certo número
de ações sistemáticas. As automatizações se realizam segundo uma programação, um
controle dos consumos e uma manutenção. As ações sistemáticas dessa função se
relacionam principalmente com o conforto. (ANGEL, 1993, p. 48).
A função de gestão pode ser dos seguintes tipos:
• Gestão de iluminação: segundo Angel (1993), a gestão de iluminação fornece um dos
primeiros elementos voltados ao conforto, adequado ao ambiente segundo a
necessidade de cada usuário de acordo com a idade, capacidades físico-motoras, uso
dos espaços ao longo do dia, repercussão sobre a ocupação dos espaços. A otimização

22
do uso e da economia de eletricidade é outro aspecto importante desta sub-função, sem
deixar de lado o conforto dos usuários. Como serviços auxiliares podem-se citar a
temporização, a variação de intensidade, o acendimento e apagamento automático
programado, comandado à distância ou por comando de voz.
• Gestão da calefação, ventilação e ar condicionado: permite ao usuário medir e
controlar a calefação, as cargas elétricas e o seu próprio conforto. Teve um grande
impulso com a evolução dos sensores e com a necessidade de racionalização de
energia. Entre os confortos gerados por esta gestão, pode-se citar a otimização em
relação ao meio externo; a auto-adaptação em relação aos equipamentos; a gestão,
ambiente por ambiente. Sob o aspecto dos requisitos possíveis, podemos citar o
controle a distância, passagem automática do regime conforto para o regime redução
no caso da ausência de indivíduos, dentre outras. (ANGEL, 1993, p. 51-52).
• Gestão da funcionalidade dos espaços: tem como objetivo flexibilizar o ambiente
quando houver modificações nos grupos familiares, novos modos de vida e adaptação
a novas necessidades. Visa permitir futuras atualizações nos sistemas atuais, instalação
de novos sistemas, interconexões, permitindo a evolução das necessidades do usuário.
(ANGEL, 1993, p.54). Nota-se que o projeto deve garantir as adaptações a novos
equipamentos no futuro, levando em conta a estrutura do ambiente, é como se fosse
pensar em cabeamento estruturado na disciplina de redes de computadores, porém,
com tetos e pisos flexíveis, ou outras façanhas arquitetônicas, fomentadas pela
tecnologia. Os requisitos básicos que a gestão de funcionalidades de espaços deve
atender são: aumentar a produtividade e a segurança, empregar todos os recursos a
forma mais eficiente possível, ter flexibilidade para novas e eventuais necessidades de
uso.
b) Função de Controle: conforme Angel (1993, p. 55), a função de controle dá ao
usuário, por um lado, informações sobre o estado de funcionamento dos equipamentos
e das instalações que os integram; e por outro lado, criam um registro dos diversos
parâmetros e eventualmente, induzem os comandos corretivos. Para tanto ele conta
com controles instantâneos e memorizados. Essa função tem por objetivo atuar sobre
os dispositivos de regulagem das instalações, com a finalidade de que as tarefas

23
programadas sejam respeitadas. As funções de controle associadas com um algoritmo
ou com uma unidade de tratamento da informação conduzirão às funções de comando.
A função de controle pode ser dos seguintes tipos de acordo com Angel (1993, p. 53
à 62):
• Controle Técnico: o controle técnico visa auxiliar o usuário a fazer o uso dos
equipamentos, dispositivos e instalações mais confiáveis e também prover
autodiagnóstico deles, o que permite, entre outros temas, programar os gastos. Esta
sub-função é responsável por controlar os diferentes equipamentos e eletrodomésticos,
as diferentes redes de alimentação, os diferentes fluídos utilizados na casa, a presença
de intrusos e os parâmetros fundamentais para verificação do estado de saúde dos
membros da família etc. Os valores apresentados devem ser extremamente confiáveis,
para que possam ser utilizados como assistências ao usuário, como também ser
ergonômica para atender todas as idades dos usuários.
• Segurança e tele-transmissão: a domótica tem como preocupação prioritária a
segurança, pois está associada aos bens materiais, incluindo a prevenção de intrusos,
incêndios e acidentes domésticos. O sistema tem que ser confiável, evitando com isso
falsos alarmes e se de fácil manuseio para todos os membros da família.
c) Função de Comunicação: uma característica possibilitada pela comunicação é a
interatividade. Através desta é permitido o telecomando e a programação para que os
sistemas envolvidos obedeçam a uma certa padronização. A função de comunicação
pode ser classificada por dois ângulos: a comunicação sem significados, por exemplo,
sinais de áudio e vídeo, onde se busca a maior fidelidade possível; e a comunicação
onde se visa intercâmbio de informações de controle do ambiente.

24
2.3 Custos de uma automação residencial
O perfil do consumidor e até o local onde está localizado o imóvel influem na
decisão de quais tecnologias devem ser adquiridas. Pessoas que vivem em residências
isoladas tendem a priorizar investimentos em segurança (AGOSTINI, 2007). O acesso por
biometria é uma das novidades mais procuradas do setor. O equipamento permite que o
cliente entre e saia de casa utilizando apenas um toque, pois o sistema opera pelo
reconhecimento da impressão digital, dispensando a tradicional chave ou o cartão. Já o
monitoramento por vídeo é um recurso comum nos dias de hoje. Com ele, o cliente pode
observar em tempo real o que está acontecendo em sua casa, por meio da internet ou de
transmissões via satélite, e ainda ter os registros de vídeo gravados, em casas ou
apartamentos situados em condomínios, a procura por tecnologias costuma ser mais
diversificada. O projetista prevê uma mudança gradativa no nível de exigência dos
consumidores, a tendência é que no futuro os clientes já busquem soluções previamente
instaladas no imóvel.
Conforto, segurança e economia. A automação residencial aplica tecnologias no
ambiente doméstico para atender basicamente a essas três necessidades. O conforto é
garantido por sistemas integrados de som, por exemplo, onde é possível reproduzir o áudio
do home theater da sala em qualquer ambiente da casa. Ou por banheiras inteligentes, que o
usuário pode controlar quando ainda está no trânsito, programando um banho na temperatura
ideal, com o melhor nível de água e espuma, para encontrar tudo pronto ao chegar a casa.
A segurança pode ser garantida por sistemas de travamento que isolam o morador em
um cômodo da casa, na presença de um invasor. Ou, no caso de uma emergência médica,
por um sistema que destranca a porta da casa e avisa ao médico e aos familiares o ocorrido.
O apartamento inteligente pode ajudar também na economia de luz e energia. Ao entrar na
residência, as luzes podem ser acionadas automaticamente ou, se ainda é dia, as janelas e
persianas são abertas para utilizar ao máximo a iluminação natural. O tempo de utilização do
ar condicionado ou do aquecimento também pode ser programado, evitando o gasto
desnecessário de energia. Mas, ter um apartamento inteligente ainda é um luxo reservado
para poucos, não se pode taxar a automação residencial como algo dispendioso sem antes
comparar com gastos normalmente feitos ao se construir ou equipar uma casa. Caro é
relativo, se for comparado o que se gasta em móveis e pisos e o que se gasta com
automação, vai se vir que os valores estão muito próximos. A automação de modo geral e a

25
residencial está ficando cada vez mais acessível, por conta do barateamento das tecnologias
e do aumento da concorrência no setor. Há dez anos havia poucas empresas no ramo e o
custo era alto. Há projetos atualmente com apartamentos de 90m² e 100m², ou seja, não
são apenas pessoas de alto padrão que estão à procura de sistemas automatizados (Agostini,
R. 2007).
Já existem algumas soluções no mercado para quem não está em busca de um novo
imóvel, mas quer reformar sua casa com equipamentos de automação. Produtos com
protocolo de transmissão sem fio, ou wireless, possibilitam o controle de sistemas elétricos e
facilitam o manuseio da iluminação, do ar condicionado e outros recursos da residência.. O
custo é menor, porque o cliente pode automatizar cada cômodo por sua vez. Há
equipamentos próprios e produtos específicos para isso, geralmente relacionados ao controle
de iluminação e de alguns eletrodomésticos.
Cabe ao morador estabelecer quanto ele está disposto a investir em produtos e
serviços de automação. O custo para a implantação da infra-estrutura em uma residência (em
construção) para um projeto de automação é de cerca de 3 a 5% do valor do imóvel, informa
Agostini, 2007. Nas residências já existentes esse valor é mais elevado, sem exatamente
poder precisar valores, mas já existem no mercado soluções que auxiliam nesse processo.
Mas mesmo os custos de infra-estrutura sendo considerados baixos (o que poderia facilitar o
crescimento do mercado), ainda há muita resistência dos construtores em apostar nesse
diferencial. A tendência é de que cada vez mais as pessoas se mudem para lugares que
agreguem facilidades de serviços e os empreendimentos terão que oferecer diferencial e,
portanto, se renderem à automação.
A Figura 01 é um projeto de automação que mostra as necessidades de segurança,
conforto e economia que podem ser atingidos dentro da automação.

26
FIGURA 01 – Modelo de automação em uma planta residencial.
Fonte: AMORY, 2001

27
3 SISTEMA DE AUTOMAÇAO DE AMBIENTES
O sistema de automação de ambientes permite que o usuário controle o
acionamento de luzes, ventiladores e outros equipamentos eletrônicos como o de um ar
condicionado, através de um controle remoto , que necessita de um módulo acionador e um
receptor infravermelho para o seu funcionamento. Esse aparelho pode ser utilizado em
qualquer ambiente como, por exemplo, apartamento, casa de praia, no trabalho, mantendo
uma interação simples e intuitiva com o usuário. Uma vantagem desse produto é que ele
garante a privacidade, possuindo um sistema de senha inserida pelo próprio usuário, desta
forma, somente pessoas habilitadas podem controlar o ambiente.
A principal interface do usuário com o sistema de automação de ambientes é o
teclado capacitivo. Por ele pode-se selecionar funções, enviar comandos e inserir senha no
sistema. O controle também interage com o usuário com sinais luminosos.
Na Figura 02 pode-se observar o diagrama da estrutura de comando, que será
explicado nos próximos subcapítulos.
FIGURA 02- Estrutura de comando do controle remoto
Controle Remoto
Gerenciamento de
Dispositivos
Armazenamento
Iluminação
Teclado Capacitivo
Circuito de
Transmissão
Circuito de
wake up

28
Além disso, faz parte desse sistema um módulo acionador que decodifica as
informações enviadas pelo controle remoto e atua diretamente na carga conectada em sua
saída. A comunicação entre o controle remoto e o módulo acionador é feita através de sinais
infravermelho. Na Figura 03 pode-se observar a estrutura de comando do módulo acionador.
FIGURA 03- Estrutura de comando do módulo acionador.
Módulo Acionador
Gerenciamento de
Dispositivos
Detecção de função
Acionamento de
carga
Resposta de
comando
Recepção IR

29
4 CONTROLE REMOTO
O controle remoto é próprio para o porte em bolso, permitindo ao usuário interagir
com o ambiente bastando para isso, direcioná-lo a um dispositivo receptor infravermelho e
acionar o comando desejado.
O controle remoto é composto por:
• bateria moeda (CR2032);
• circuito integrado transferidor de carga;
• teclado capacitivo;
• microcontrolador ;
• modulador PWM;
• transmissor IR.
Na Figura 04 pode-se observar o diagrama em blocos do controle remoto.
FIGURA 04- Diagrama do controle remoto.

30
4.1 Bateria
Existem as baterias alcalinas e as de lítio; ambas possuem longa duração e maior
versatilidade de uso, pois elas são de pequeno porte. As alcalinas tipo botão e miniaturas são
econômicas, de alta confiança, têm um baixo custo por hora de uso, mas as baterias de lítio
tipo botão são mais potentes, possuindo armazenagem de longa duração e são recomendadas
para utilizar em condições extremas de temperatura.
A bateria utilizada no controle é do tipo moeda (CR2032), cuja autonomia
calculada para essa aplicação é de aproximadamente seis meses. Na Figura 05 pode ser
observada a bateria utilizada.
FIGURA 05 – Bateria CR2032.
4.2 Circuito integrado transferidor de carga
O Circuito integrado transferidor de carga é um circuito digital capaz de detectar o
toque ou até mesmo a proximidade do dedo do usuário. Alguns componentes passivos fazem
parte de sua configuração, e o projeto da placa de circuito impresso merece uma atenção
especial para que ele funcione adequadamente. A célula que será usada para a detecção do
toque deverá seguir algumas recomendações do próprio fabricante quanto ao tamanho,
forma, espessura do cobre e layout dos circuitos adjacentes. É necessário que ela seja de
31
superfície condutora, podendo variar desde um circuito impresso até o óxido de índio
aplicado sobre tela transparente. Uma célula maior que o recomendado pode apresentar
problemas de hipersensibilidade, bem como o efeito contrário poderá ocorrer em células
com dimensões menores que as especificadas no manual.
Outro fator determinante para o ajuste de sensibilidade são os capacitores localizados
na entrada do circuito integrado. Esses capacitores, em conjunto com a capacitância exercida
pelo toque são responsáveis pela caracterização do toque que será reconhecido pelo sistema.
Os valores dos capacitores é recomendado pelo fabricante, sendo que as adaptações são
necessárias baseando-se nas variações de layout de cada aplicação.
A aplicação desse circuito integrado da forma como está caracterizado no controle
remoto, ou seja, visando à alimentação do circuito através do toque do usuário é patenteada,
sendo a principal responsável pelo baixo consumo do sistema (inferior a 10 µA).
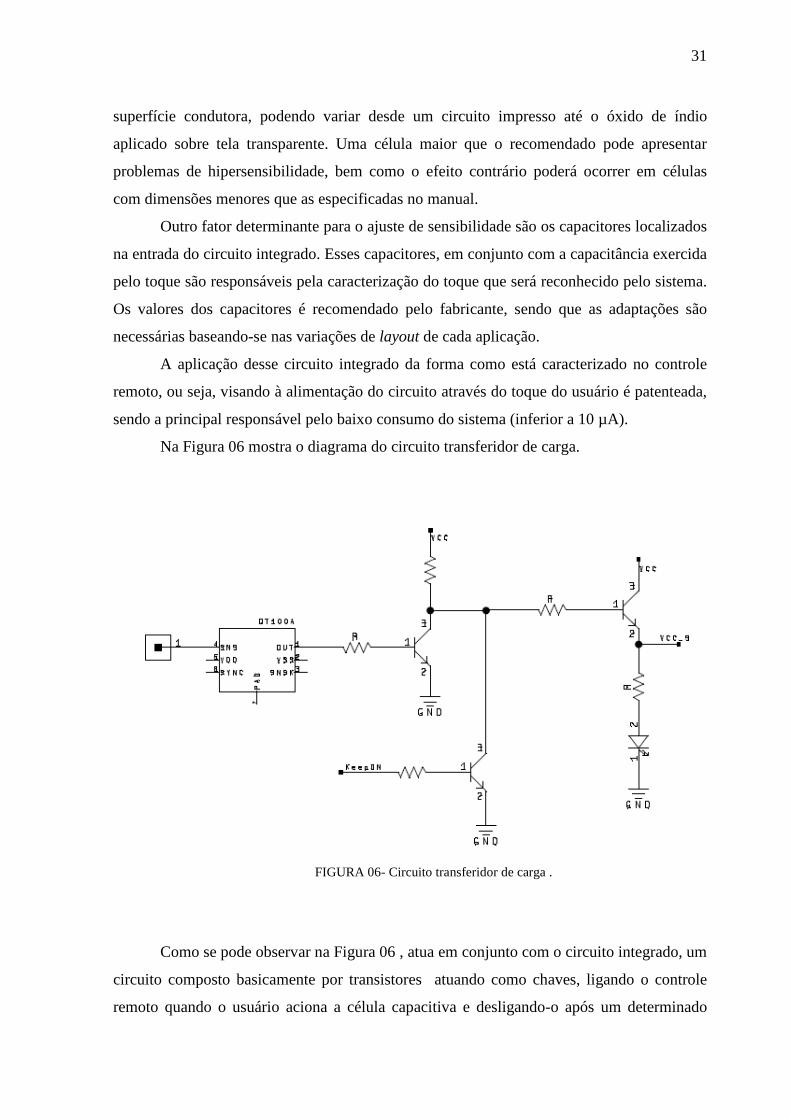
Na Figura 06 mostra o diagrama do circuito transferidor de carga.
FIGURA 06- Circuito transferidor de carga .
Como se pode observar na Figura 06 , atua em conjunto com o circuito integrado, um
circuito composto basicamente por transistores atuando como chaves, ligando o controle
remoto quando o usuário aciona a célula capacitiva e desligando-o após um determinado
32
intervalo de tempo que deverá ser programado através do microcontrolador e começará a ser
contado a partir do momento em que o usuário tira o controle da mão.
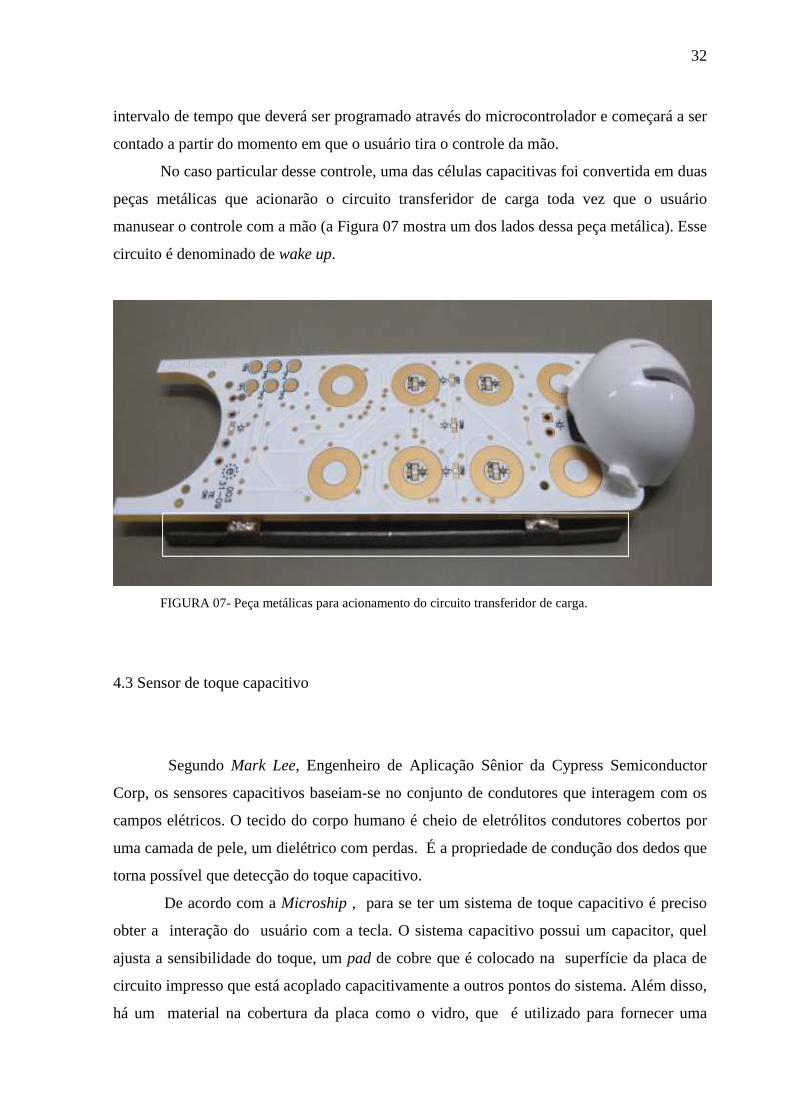
No caso particular desse controle, uma das células capacitivas foi convertida em duas
peças metálicas que acionarão o circuito transferidor de carga toda vez que o usuário
manusear o controle com a mão (a Figura 07 mostra um dos lados dessa peça metálica). Esse
circuito é denominado de wake up.
FIGURA 07- Peça metálicas para acionamento do circuito transferidor de carga.
4.3 Sensor de toque capacitivo
Segundo Mark Lee, Engenheiro de Aplicação Sênior da Cypress Semiconductor
Corp, os sensores capacitivos baseiam-se no conjunto de condutores que interagem com os
campos elétricos. O tecido do corpo humano é cheio de eletrólitos condutores cobertos por
uma camada de pele, um dielétrico com perdas. É a propriedade de condução dos dedos que
torna possível que detecção do toque capacitivo.
De acordo com a Microship , para se ter um sistema de toque capacitivo é preciso
obter a interação do usuário com a tecla. O sistema capacitivo possui um capacitor, quel
ajusta a sensibilidade do toque, um pad de cobre que é colocado na superfície da placa de
circuito impresso que está acoplado capacitivamente a outros pontos do sistema. Além disso,
há um material na cobertura da placa como o vidro, que é utilizado para fornecer uma

33
superfície de contato com o usuário. O bloco gera uma capacitância parasita de terra como
referência, no qual quando o usuário toca em alguma tecla capacitiva gera uma capacitância
parasita no terra. Na Figura 08 pode-se observar o princípio de funcionamento do sensor de
toque capacitivo descrito anteriormente.
FIGURA 08- Sensor de toque capacitivo.
4.3.1 QT1081
O Circuito Integrado QT1081 é conhecido pela simplicidade, confiabilidade,
facilidade de design. Utiliza um capacitor de referência único ligado a dois pinos do chip
para cada sensor chave, um sinal de rastreamento leva a um dos pinos para o sensor, que é
feito de um eletrodo, que atua como chave.
Através da Figura 09 pode-se observar o diagrama desse componente.

34
FIGURA 09- Diagrama do QT1081
Fonte :Datasheet Quantum, p. 6
Através do esquema mostrado anteriormente, pode-se observar que o QT1081 possui
oito entradas, KEY0....KEY7, que são os botões capacitivos do controle e oito saídas
respectivamente. Cada uma das entradas é ativada quando um toque é confirmado no
eletrodo correspondente. Existem dois modos distintos de configurar a saída, podendo-se
usar oito pinos para a detecção de cada uma das oito teclas ou restringir a detecção a quatro
pinos, utilizando a codificação binária.

35
Para que o dispositivo comece a funcionar normalmente é necessário que o mesmo,
após um evento de reinicialização (reset), calibre-se num tempo de 300ms, sendo que suas
chaves só irão funcionar corretamente uma vez que todas as chaves tenham sido calibradas.
Em cada chave há um resistor conectado, que pode ser configurado de dois modos:
• Modo Full: Todos os oitos resistores, conforme foram mostrados na Figura
09, possuem obrigatoriamente o valor de 1MΩ.
• Modo Simplificado: Nesse modo, o resistor de 1MΩ deve ser ligado a partir
de SNS6K para SNS7. Na modalidade simplificada, apenas um resistor 1MΩ é necessário.
Pode-se perceber que a presença e a conexão de resistores, nesse tipo de opção, afeta os
valores exigidos do capacitor, este efeito será especialmente perceptível se os valores dos
capacitores forem da ordem de 22nF..
Os capacitores determinam a sensibilidade dos eletrodos-chave. Os maiores valores
de capacitância tornam o canal mais sensível de detecção correspondente. Os valores do
capacitor podem variar para cada canal, permitindo diferenças na sensibilidade. O intervalo
típico esta entre 1 nF e 50 nF em função da sensibilidade necessária. Valores maiores
valores do capacitor exigem melhor qualidade para garantir uma detecção confiável.
Na Figura 10 pode-se observar o controle remoto contendo as oito chaves
capacitivas.
FIGURA 10- Oito chaves capacitivas.

36
4.4 Microcontrolador do controle remoto
O microcontrolador utilizado no controle remoto foi o ATtinny 2313 por solicitação
do cliente, que se responsabilizou pelo desenvolvimento do firmware, pois já possuía
alguma experiência com a plataforma de desenvolvimento da Atmel.
As características gerais do microcontrolador, segundo o seu datasheet, são:
• 32 registradores de 8 bits de uso geral.
• Tensão de operação de 2,7 a 5,5V.
• Até 20 MIPS em 20 MHz de clock.
• 2K Bytes de Flash In-System Self Programmable ( 10.000 Ciclos de
Write/Erase ).
• 128 Bytes de In-System Programmable EEPROM ( 10.000 Ciclos de
Write/Erase ).
• 128 Bytes de SRAM interna.
Os principais periféricos oferecidos, segundo o seu datasheet, são:
• Um Timer/Counter de 8-bit com Prescaler.
• Um Timer/Counter 16-bit com Prescaler.
• Quatro canais de PWM.
• Um comparador nalógico.
• Timer Watchdog Programável com oscilador no próprio chip.
• USI – Universal Serial Interface.
• Interrupções internas e externas.
• Circuito de Power-on Reset.
• Oscilador interno calibrável.
• PDIP de 20 pinos , SOIC de 20 pinos , QFN/MLF de 20 pads
(utilizado no sistema).
• 8 pinos de I/O programáveis.

37
Estabelecidas as características principais do componente, pode-se observar a
seguir a explicação do desenvolvimento do hardware e do firmware do
microcontrolador utilizado no controle remoto.
4.4.1 Hardware do microcontrolador do controle
O hardware trata da parte física do projeto, ou seja, do conjunto de componentes
eletrônicos que é montado sobre a PCI.
Na Figura 11, pode-se observar o diagrama de blocos no hardware usado no
microcontrolador.
FIGURA 11- Hardware do microcontrolador do controle.
Porta D
Key0 Out7 Key1 Out6 Key2 Out5 Key3 Teclado Out4 Key4 Capacitivo Out3 Key5 Out2 Key6 Out1
Porta B
Controlador ATtiny 2313
I S P
Circuito de Wake Up
Carregamento de Firmware
Sinalização de transmissão
Clock
Transmissão
TX Modulação
PWM
Leds de Backlight
Eletrodos
Sinalização para as teclas de função
Porta D
Key0 Out7 Key1 Out6 Key2 Out5 Key3 Teclado Out4 Key4 Capacitivo Key 5 Out3 Key6 Out2 Key7 Out1
Porta B
Controlador ATtiny 2313
I S P
Circuito de Wake Up
Carregamento de Firmware
Sinalização de transmissão
Clock
Transmissão
TX Modulação
PWM
Leds de Backlight
Eletrodos
Sinalização para as teclas de função
3V

38
O diagrama da figura 11, mostra em detalhes a arquitetura do hardware do controle
remoto. Pode-se ter uma ideia detalhada de como o controlador se comunica com os
dispositivos ao redor e quais portas estão sendo utilizadas em cada uma das conexões.
Um item interessante a ser considerado nessa placa foi a inserção de pontos de testes
para auxiliar na gravação. Tais pontos são:
• VCC- alimentação do microcontrolador em +5V
• GND- terra ou neutro do componente.
• SCK- Modo de interface serial universal para clock.
• MISO- Saída serial do microcontrolador.
• MOSI- Entrada serial do microcontrolador.
• RESET- Apagar operações.
Na Figura12, observam-se os pontos de gravação na placa do controle.
FIGURA 12- Pontos de gravação do controle remoto
.

39
Além disso, para que fosse possível gravar o controlador através desses pontos de
testes , foi necessário desenvolver um dispositivo chamado “cama de pregos” (Bed of Nails).
Ele é composto por seis agulhas banhadas a ouro, um cabo de alimentação e uma interface
ISP. A interface ISP é um tipo de comunicação usada principalmente para transferência de
informação entre circuitos integrados em equipamentos eletrônicos, minimizando, assim, o
número de condutores, pinos e o tamanho do circuito integrado. Com isso, para realizar a
gravação é necessário encaixar a placa sobre a cama de pregos, de modo que os pontos de
teste coincidam sobre as agulhas, estabelecendo uma conexão elétrica. A Figura 13 ilustra
todo esse dispositivo citado anteriormente.
FIGURA 13- Dispositivo para gravação do microcontrolador do controle remoto.
4.4.2 Firmware do microcontrolador do controle remoto
Firmware é um conjunto de instruções operacionais programadas diretamente no
hardware de um equipamento eletrônico. É o firmware que contém as informações de
inicialização que permitirão o correto funcionamento de um equipamento.

40
Na Figura 14 pode-se observar o fluxograma do firmware do controle remoto.
FIGURA 14- Estrutura do firmware do microcontrolador do controle remoto.
Conforme mostrado na Figura 14, pode-se observar que são várias as etapas que
compõem o firmware do controle remoto. Primeiramente, para o desenvolvimento desse
trabalho, foi criado um protocolo proprietário denominado ONEON Home. Um protocolo é
um método standard que permite a comunicação entre processos (que se executam
Protocolo ONEON Home
Inicializa controladores de hardware
Inicializa o protocolo ONEON Home
Inicializa a aplicação
Verifica o manuseio
Verifica o teclado
Transmite a mensagem de comando
Pisca o led de resposta
Seleciona a função
Acende o led da função selecionada
Dorme por 500ms
Manuseio
Ação
Função
Ocioso por 50ms
Não por
Sim por
Sim por
Não
Não
Sim

41
eventualmente em diferentes máquinas), isto é, um conjunto de regras e procedimentos a
respeitar para emitir e receber dados . Na Figura 15 pode-se observar a estrutura do
protocolo utilizado no projeto.
FIGURA 15- Protocolo ONEON Home do controle remoto.
Estabelecidos os parâmetros desse protocolo, torna-se necessário definir quais são as
teclas necessárias para o sistema. As teclas estabelecidas como as de ações são:
• Liga - Aciona o dispositivo controlado pelo sistema.
• Desliga - Desliga o dispositivo controlado pelo sistema.
• Mais (+) – Aumenta a rotação do ventilador ou a intensidade
luminosa das lâmpadas.
• Menos(-) – Diminui a rotação do ventilador ou a intensidade
luminosa das lâmpadas.
E as teclas estabelecidas como as de função são responsáveis pela seleção do modo
de operação do sistema. Essas teclas são:
• Luz
• Ventilador
• Equipamentos eletrônicos
• E todos.
A Figura 16 ilustra todas as teclas de ações e funções do controle remoto.
Sincronismo Ação Função Senha do usuário

42
FIGURA 16- Teclas de ações e funções do controle remoto.
Os símbolos da figura 16 não estão de acordo com a ISO 7000, pois o cliente utilizou
outras imagens de identificação.
Quando manuseado pelo usuário, o controlador é alimentado pelo circuito de wake
up e os leds de backlight são acionados conforme mostra a Figura 17.

43
FIGURA 17- Led backlight.
Assim, quando alguma tecla de função for acionada, um sinal é enviado ao
controlador e o led que indica a função escolhida acenderá na tecla mostrando que a função
foi selecionada, como mostra a Figura 18.

44
FIGURA 18- Sinalização de função.
Além disso, quando uma ação é selecionada há uma sinalização de transmissão
conforme indicada pela Figura 19.

45
FIGURA 19- Sinalização de transmissão.
4.5 Modulador PWM e circuito de transmissão
A modulação por largura de pulso, mais conhecida pela sigla em inglês PWM
(Pulse-Width Modulation) , de um sinal ou em fonte de alimentação envolve a modulação de
sua razão cíclica para transportar qualquer informação sobre um canal de comunicação ou
controlar o valor da tensão de alimentação entregue a carga.
Na Figura 20 pode-se observar o circuito utilizado no controle.

46
FIGURA 20- Modulador PWM.
Conforme pode-se observar na Figura 20, o circuito é composto por:
• Porta do tipo NOR
• Transistor
• Resistores de polarização
• Led infravermelho.
Nessa etapa do projeto foi necessário definir qual seria o tipo de sensor utilizado no
circuito receptor infravermelho do módulo acionador. O sensor escolhido foi o Tsop 348 por
ter um preço mais acessível, atendendo aos requisitos e tendo demodulação integrada.
Assim, definido o sensor e observando o valor de frequência, através do seu datasheet,
conforme mostra a Tabela 01, definiu-se trabalhar com uma frequência de 38 kHz.

47
TABELA 01 – Frequência utilizada pelo sensor
Componente Frequência
Tsop 34830 30 kHz
Tsop 34833 33 kHz
Tsop 34836 36 kHz
Tsop 34837 36,7 kHz
Tsop 34838 38 kHz
Tsop 34840 40 kHz
Tsop 34856 56 kHz
A grande vantagem desse método é a alta velocidade de conversão que é
praticamente simultânea às variações do sinal de entrada.

48
5 MÓDULO ACIONADOR
O módulo acionador é composto por:
• fonte fast;
• circuito de sincronismo;
• microcontrolador;
• circuito de potência.
O módulo acionador possui dimensões que possibilitem sua instalação na caixa de
passagem do dispositivo a ser controlado (luminária, ventilador, ar condicionado ou
tomada). Os interruptores convencionais devem ser substituídos por pulsadores, conectados
aos módulos acionadores via cabo tipo telefônico. Deste modo, os fios fase e neutro podem
vir diretamente da caixa de distribuição, dispensando a passagem de fase, retorno e ligações
paralelas entre os interruptores e os dispositivos controlados.
A Figura 21 mostra o diagrama em blocos do módulo acionador.
FIGURA 21- Diagrama do módulo acionador. 5.1 Fontes de alimentação
Para Bogart (2001), o termo fonte de alimentação em geral se refere a uma fonte em
corrente contínia de potência, normalmente acionada a partir de uma alimentação em
corrente alternada.

49
Uma fonte cc de potência, acionada a partir de uma alimentação ca, pode ser considerada um conservor ca/cc. Uma fonte que produz alimentação ca com frequência constante e amplitude constante, a partir de uma fonte cc, é chamada de inversor. Algumas fontes são projetadas para funcionar a partir de fontes cc e produzir um valor de potência diferente com um nível cc diferente, estas fontes são chamadas de conversor cc/cc (BOGART, 2001, p. 257)
De acordo com esse mesmo autor, uma fonte de alimentação cc funcionando com
base em uma fonte ca, apresenta um ou mais dos componentes fundamentais:
• Regulador de tensão – mantém tensão de saída praticamente constante.
• Filtro- filtro do tipo passa-baixas que retira as pulsações na forma de onda
retificada.
• Retificador – converte tensão ca em tensão cc pulsante, permitindo que a
corrente na carga tenha apenas um sentido.
É importante observar que a complexidade de um projeto de fonte de
alimentação, assim como os componentes utilizados, dependem exclusivamente da
aplicação para a qual a fonte será projetada.
As fontes de alimentação podem ser classificadas como reguladas ou desreguladas
e ajustáveis ou fixas.
Na Figura 22 pode-se observar uma fonte em ponte de diodos, na qual faz a
retificação em onda completa sem a necessidade de duplo secundário no transformador.
FIGURA 22- Retificação em ponte de diodos
Fonte : SOARES, 2008,

50
Em contrapartida, a Figura 23 mostra uma fonte utilizando conversor buck
FIGURA 23 – Conversor buck.
Fonte : SOARES, 2008.
Segundo Soares (2008), a base do transistor Q é polarizada por um circuito PWM,
de forma que ele só conduz nos intervalos de nível alto dos pulso, no restante do ciclo, ele
está em corte. Iniciada a condução, a corrente Iq aumenta com o tempo, devido à presença
do indutor, sendo que quando o transistor entra em corte, uma tensão de polaridade oposta
aparece no indutor, devido à força contra-eletromotriz. O fluxo da corrente passa agora pelo
diodo e é decrescente, resultando em correntes e tensão na carga, conforme o gráfico da
Figura 23.
Assim, com base em um exemplo apresentado anteriormente de fonte linear e fonte
chaveada, pode-se observar na Tabela 02 as principais características comparativas desses
dois modelos de fontes .
TABELA 02 – Comparação de parâmetros médios de fontes lineares e chaveadas
Fonte : SOARES, 2008.

51
Para Soares (2008), as definições dos parâmetros da Tabela 02 são:
• Regulação de linha: é a variação da tensão de saída devido a uma
variação da tensão de entrada.
• Regulação de carga: é a relação percentual entre a variação da tensão
de saída e a tensão nominal de saída, quando a corrente da saída varia de zero até o
valor nominal.
• Eficiência energética: relação percentual entre a potência de saída e a
potência de entrada.
• Resposta a transientes: o tempo necessário para a tensão de saída
retornar à faixa de regulação após uma variação brusca de 50% na carga.
• Tempo de sustentação: intervalo de tempo, após perda da tensão de
entrada, em que a tensão e corrente da saída se mantêm dentro dos limites
especificados.
5.1.1 Fonte de alimentação sem transformador
Nos circuitos de fonte de alimentação comum de baixa tensão CC, é usado um
transformador para baixar a tensão da rede. Essa tensão é depois retificada, filtrada e
eventualmente regulada para poder ser usada pelos circuitos que devem ser alimentados.
Em uma fonte sem transformador, o que se faz é aboli-lo e fazer um divisor de tensão que
baixa a tensão da rede aproveitando a reatância capacitiva do capacitor C1, conforme se
pode observar na Figura 24, que mostra todo o circuito utilizado .

52
FIGURA 24- Fonte alimentação sem transformador.
A vantagem na utilização de um capacitor está no fato de que ele faz isso com um
mínimo de dissipação de energia em forma de calor, o que não acontece com um resistor.
Assim, é possível reduzir a tensão da rede de energia para valores mais apropriados para o
trabalho de uma fonte, sem usar transformador, com a ajuda de um capacitor apropriado.
Um valor apropriado de C1 permite obter a tensão desejada sobre a carga, ou ainda
para um circuito retificador e um regulador de tensão. De fato, os capacitores usados devem
ser do tipo despolarizado (poliéster) com tensões de trabalho que sejam pelo menos uma vez
e meio o pico da tensão de entrada. Isso significa capacitores com tensões de pelo menos
200 V para a rede de 110/120 V e pelo menos 400 V para a rede de 220/240 V.
O resistor ligado em paralelo com o capacitor de C1 tem por finalidade provocar sua
rápida descarga, quando a fonte é desconectada. Isso é importante para se evitar um choque
acidental deste componente no caso de um trabalho de manutenção, ou diagnóstico de
problemas da fonte.
Uma vez que a tensão tenha sido baixada pela rede de entrada em que o componente
principal é o capacitor, é necessário fazer uma retificação de limitação inicial de tensão,isto
é, a transformação da corrente alternada em contínua, feita por onda completa, na qual são
utilizados quatro diodos comuns. Tendo em vista que esta fonte alimenta um
microcontrolador, o diodo zener serve como regulador de tensão fornecendo uma tensão de
referência constante.
Se a tensão da rede variar, a saída da fonte também varia, independente do filtro
usado, pois os diodos polarizados diretamente não têm resistência elétrica nula e, portanto, a

53
tensão da fonte sempre muda com a variação da corrente da carga. Uma das primeiras
técnicas usadas para a estabilização da fonte é utilizar um componente ativo, o transistor.
O fusível de entrada é importante para proteger o circuito, já que se o capacitor entrar
em curto,é preciso que a alimentação seja desligada imediatamente.
Esse modelo de fonte se fez necessário, pois a aplicação não suportaria o espaço e o
custo demandado por uma fonte com transformador.
5.2 Circuito de sincronismo
Um circuito de sincronismo tem por base fornecer um sinal de referência comum a
diversos circuitos ou equipamentos de uma rede. A Figura 25 mostra o circuito utilizado no
projeto.
FIGURA 25- Circuito de sincronismo com a rede.
Como se pode observar na Figura 25, o circuito de sincronismo capta uma amostra
de sinal da rede, o qual servirá como referência do microcontrolador para que os sinais de
acionamento sejam enviados ao circuito de potência no tempo correto.

54
5.3 Circuito de potência
O circuito de potência utilizado no módulo acionador é composto basicamente por
dois circuitos:
• Optoacoplador.
• Triac.
5.3.1 Optoacoplador
Segundo Bogart (2001), um acoplador ótico é a combinação de um dispositivo
emissor de luz com um dispositivo sensível a luz, em um só encapsulamente. O autor afirma
que o exemplo mais simples é um led encapsulado com um fototransistor, sendo que o led é
alimentado por um circuito de entrada, e o fototranssitor, respondendo a luz emitida, aciona
um circuito de saída. Portando os circuito de entrada e saída são acoplados somente pela
energia luminosa.
De acordo com Bogart (2001), a principal vantagem desse arranjo é o excelente
isolamento elétrico que pode proporcionar entre a entrada e a saída.
Na Figura 26 pode-se observar a estrutura de um optoacoplador, onde há um diodo
emissor de luz nos pinos 2 e 3 e do fototriac entre pinos 4 e 6.
FIGURA 26- Símbolo do optoacoplador.
Fonte: BOGART, 2001, p.353.

55
O optoacoplador utilizado para o dispositivo do módulo foi o MOC3052, que possui
algumas características gerais extraídas do seu datasheet, como:
• Emissor:
o Tensão reversa: 3 V.
o Potência de dissipação: 100 mW.
o Corrente de polarização: 60 mA.
• Detector:
o Tensão nos terminais em estado desligado: 600 V.
o Potência de dissipação: 300 mW.
A Figura 27 mostra a estrutura utilizada no módulo acionador.
FIGURA 27- Optoacoplador utilizado no módulo acionador.
O sinal de acionamento e a resistência R1 em série estabelecem uma corrente no led
emissor, proporcionando um nível de luz que será incidido sobre o fototriac. Essa luz fará
com que o fototriac conduza, emitindo um sinal de disparo no gate do triac, acionando a
carga.

56
Se a tensão de entrada variar, a quantidade de luz também muda, o que significa que
a tensão de saída muda de acordo com a tensão de referência adotada.
5.3.2 Triac
O triac é um componente formado basicamente por dois SCRs internos ligados em
anti paralelo. Ele possui três terminais: A1 (anodo 1), A2 (anodo 2) e gate (G). A Figura
28 mostra o símbolo do triac.
FIGURA 28- Símbolo do triac
Fonte: BOGART, 2001.
A Figura 29, mostra o circuito equivalente a um triac.
FIGURA 29 – Circuito equivalente ao triac..
Fonte: BOGART, 2001.
A1
G
A2
57
De acordo com a Figura 29, o autor afirma que:
A porta é conectada a base de Q2 e a base de Q3, ambos transistores NPN, sendo que um pulso de corrente circulando no gatilho fará com que uma corrente circule por Q1 e Q2 se A1 for mais positivo que A2, ou por Q3 e Q4, se A2 for mais positivo que A1. Além disso, o gatilho deve ser positivo e em relação a A2, para que Q1 e Q2 entrem em condições e desse ser positivo em relação a A1, para que Q3 e Q4 entrem em condução (BOGART, 2001, p 332).
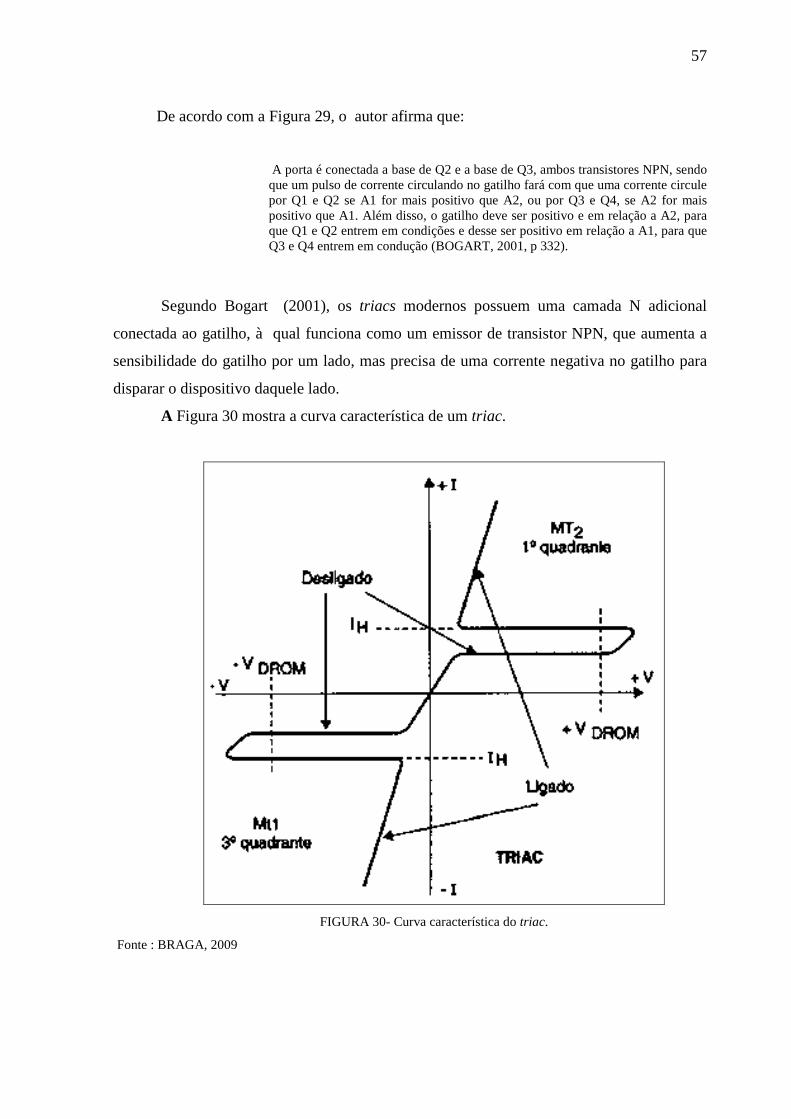
Segundo Bogart (2001), os triacs modernos possuem uma camada N adicional
conectada ao gatilho, à qual funciona como um emissor de transistor NPN, que aumenta a
sensibilidade do gatilho por um lado, mas precisa de uma corrente negativa no gatilho para
disparar o dispositivo daquele lado.
A Figura 30 mostra a curva característica de um triac.
FIGURA 30- Curva característica do triac.
Fonte : BRAGA, 2009

58
O eficiente controle da velocidade de um ventilador e até mesmo da intensidade da
luz pode ser feito através do uso de um dimmer.
O triac utilizado foi o BT 139, que possui características gerais como:
• Máxima corrente no estado ligado = 16 A.
• Corrente de pico no gate = 2 A.
• Tensão pico no gate = 5 V.
O que o circuito faz é controlar o ângulo de condução desses componentes
eletrônicos. Disparando-o em diversos pontos do sinal senoidal da rede elétrica domiciliar,
é possível aplicar potências diferentes a uma carga (lâmpada, ventilador). Assim, se o
disparo for feito no início do semiciclo, todo ele (o semiciclo de potência) poderá ser
conduzido para a carga e ela receberá potência máxima. Entretanto, se o disparo ocorrer no
final do semiciclo, pequena parcela da energia será conduzida até a carga que operará com
potência reduzida. Na Figura 31 podem-se observar as formas de onda, com disparos no
início e no final do processo.
FIGURA 31- Formas de ondas do disparo do triac.
A Figura 32 mostra o triac interligado com o optoacoplador formando assim o
circuito de potência.

59
FIGURA 32- Circuito de potência.
5.4 Microcontrolador do módulo acionador
O microcontrolador utilizado para o desenvolvimento do módulo acionador também
foi o ATtinny 2313, o qual possui características citadas no capítulo do controle remoto.
A estrutura do desenvolvimento do hardware e do firmware do microcontrolador
utilizado no módulo acionador, podem-se observar nos próximos subcapítulos.
5.4.1 Hardware do microcontrolador do módulo acionador
Na Figura 33, pode-se observar o diagrama de blocos do hardware usado no
microcontrolador.
60
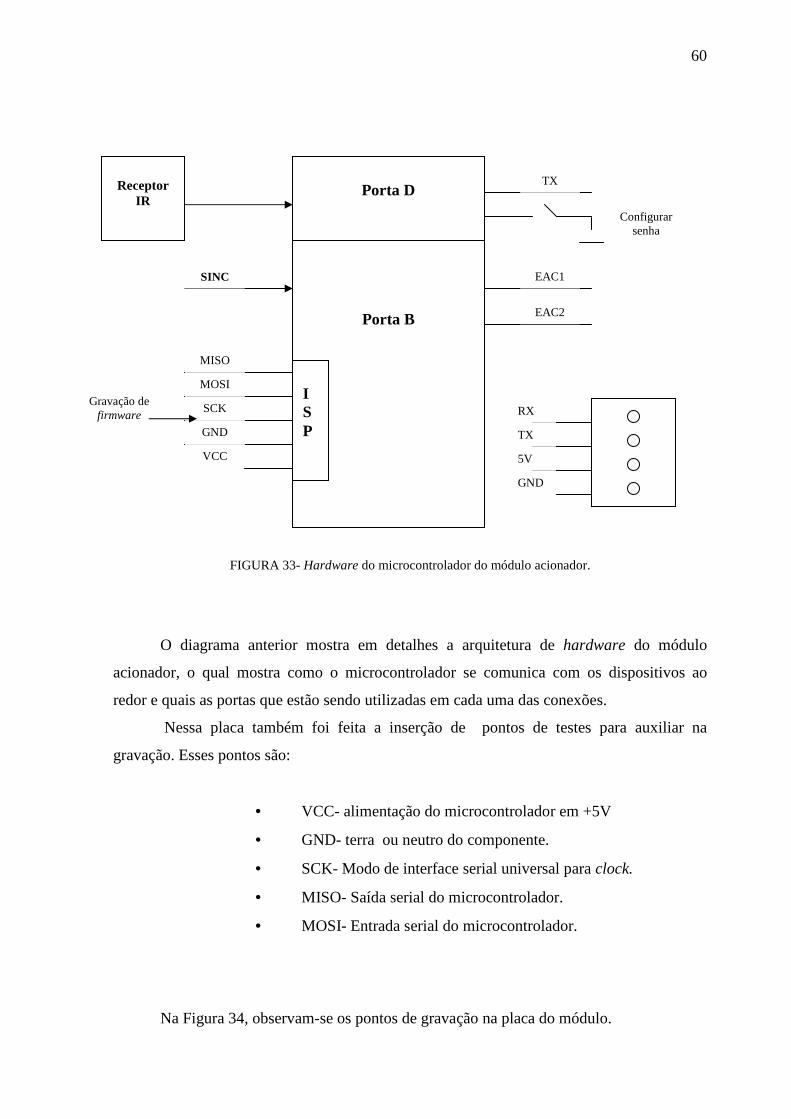
FIGURA 33- Hardware do microcontrolador do módulo acionador.
O diagrama anterior mostra em detalhes a arquitetura de hardware do módulo
acionador, o qual mostra como o microcontrolador se comunica com os dispositivos ao
redor e quais as portas que estão sendo utilizadas em cada uma das conexões.
Nessa placa também foi feita a inserção de pontos de testes para auxiliar na
gravação. Esses pontos são:
• VCC- alimentação do microcontrolador em +5V
• GND- terra ou neutro do componente.
• SCK- Modo de interface serial universal para clock.
• MISO- Saída serial do microcontrolador.
• MOSI- Entrada serial do microcontrolador.
Na Figura 34, observam-se os pontos de gravação na placa do módulo.
TX
EAC1
EAC2
Receptor
IR
Porta D
Porta B
MISO
MOSI
SCK
GND
VCC
SINC
I S P
RX
TX
5V
GND
Configurar senha
Gravação de firmware

61
FIGURA 34- Pontos de gravação do módulo acionador.
Além disso, também foi necessário o desenvolvimento de uma cama de pregos para
realizar a gravação. A cama de pregos, assim como a que teve no controle remoto, é
composta por seis agulhas banhadas a ouro, um cabo de alimentação e a comunicação é
realizada através de uma interface ISP.
A Figura 35 ilustra todo o dispositivo de cama de pregos do módulo acionador.

62
FIGURA 35- Dispositivo para gravação do microcontrolador do módulo acionador
5.4.2 Firmware do microcontrolador do módulo acionador
Na Figura 36 pode-se observar o fluxograma do firmware do módulo acionador.

63
Protocolo ONEON Home
Inicializa a aplicação
Ocioso por 8,333ms
(sinal de sincronismo)
Sim Frame
Transmite comando de
status ONEON Home Não
por
Chave
Verifica chave seletora
Verifica interface serial
Aplica função de
acionamento de potência
(função, ação)
Frame 1
Sincron.
Senha hab.
Pulso
Verifica interruptor
Verifica status
Status
Ativa flag de ação
Ação = ON Ação = OFF
Habilita verificação de
senha
Desabilita verificação
de senha
Frame 2
Ativa flag de ação
Verifica ação e função
Confere Descarta comando
Não
por
Não
Sim
50
Sim
Confere
Verifica senha
Frame 3 Verifica senha
Ativa flag de ação
Descarta comando
Descarta comando Confere
Sim
50
Sim
50
Sim
50
Sim
50
Não
por
Não
por
Sim
50
OFF
ON
Senha hab.
Sim
Não
Não
50
Não
50
Não
50
Sim
50
Não
1
0
Sim
Não
Inicializa o protocolo
ONEON Home
Inicializa controladores
de hardware
FIGURA 36- Estrutura do firmware do microcontrolador do módulo acionador

64
Conforme mostrado na figura anterior, pode-se observar que são várias as etapas que
compõem o firmware do módulo acionador. Primeiramente, para o desenvolvimento dessa
etapa de trabalho foi criado novamente um protocolo proprietário . Na Figura 37 pode-se
observar a estrutura do protocolo utilizado.
FIGURA 37- Protocolo ONEON Home do módulo acionador.
O fluxograma apresentado anteriormente mostra que o firmware do módulo
acionador é dividido basicamente em quatro etapas:
• Verificação de interruptor.
• Verificação de sincronismo.
• Verificação de ação e função.
• Verificação de senha.
Para haver verificação de interruptor, nenhum Frame (um conjunto de bits que
compõe um protocolo), tem que ser detectado. Se houver um Frame haverá primeiramente
uma verificação no sinal de sincronismo com a rede. O Frame 1 trata da verificação de
ação e função do sistema. A senha do usuário pode-se ser verificada através dos Frames 2 e
3.
Senha do usuário Função Ação Sincronismo
65
6 METODOLOGIA
Uma pesquisa é um processo sistemático de construção do conhecimento que tem
como metas principais gerar novos conhecimentos ou refutar algum conhecimento pré-
existente. Para Lakatos e Marconi (1987, p.15), "a pesquisa pode ser considerada um
procedimento formal com método de pensamento reflexivo que requer um tratamento
técnico ou científico, e se constitui no caminho para se conhecer a realidade ou para
descobrir verdades parciais"
Assim, dentre as várias modalidades de pesquisas, neste trabalho será aplicada a
pesquisa quantitativa do tipo exploratória.
Segundo Minayo (1994), a pesquisa quantitativa representa o espaço científico,
porque o traduz em “objetividade” e em “dados matemáticos”.
Assim, este trabalho teve início com uma reunião inicial para levantar quais eram as
reais necessidades do cliente em relação ao sistema de automação para ambientes.
Após ter elaborado um tipo de caderno de especificações, o qual não foi mencionado
no decorrer do trabalho, pois o cliente que solicitou o projeto não autorizou, foi realizada
uma pesquisa bibliográfica, cujos tópicos essenciais foram: domótica, teclado capacitivo,
fontes, optoacopladores, modulação e triacs.
No capítulo subseqüente, foi apresentado o sistema de automação de ambientes
projetado, no qual consta os fluxogramas de funcionamento do controle remoto e do módulo
acionador, dando explicações de como seguiria o desenvolvimento do projeto.
Após ter estabelecido isso, foram apresentados inicialmente todos os blocos que
constaria o controle remoto: bateria, circuito integrado transferidor de carga, QT1081,
firmware, modulador PWM e circuito de transmissão, onde constam todas as insformações
necessários para o entendimento dessas etapas, os circuitos utilizados, os fluxogramas e as
imagens ilustrativas.
No capítulo sobre o módulo acionador, foi apresentado inicialmente um diagrama de
blocos, que consta toda a estrutura do projeto do módulo acionador: fonte fast, circuito de
sincronismo, firmware, circuito de potência, onde há explicações sobre o funcionamento de
cada etapa, os circuitos utilizados, os fluxogramas e as imagens ilustrativas.
Por fim, para o fechamento do projeto, foi necessário realizar testes em cada etapa
mencionada anteriormente. Os testes do controle remoto dividiram-se em : consumo de
bateria, alcance led infravermelho, sensibilidade do teclado, sensibilidade wake up e

66
inserção de senha. E os testes do módulo acionador dividiram-se em: segurança, condições
agressivas (calor) e interruptor pulsador . Todos os testes foram realizados primeiramente
em bancadas, no qual pode-se tirar fotos, ilustrando algumas das etapas mencionadas.
Após ter feito e explicado todo o desenvolvimento do sistema de automação de
ambientes composto por um controle remoto, módulo acionador e receptor infravermelho,
considerações finais foram também mencionadas, onde consta as conclusões realizadas do
projeto estabelecendo uma conexão entre o modelo teórico proposto e os dados obtidos na
prática, daí o enfoque quantitativo do trabalho.
6.1 Métodos aplicados
O projeto de conclusão de curso denominado de Sistema de automação de ambiente,
foi realizado nos laboratórios da LABelectron Fundação CERTI, localizado no Balneário
Estreito, próximo a Marinha, no período de agosto de 2009 à junho de 2010.
A fim de uma maior organização de pesquisa, inicialmente foi feito um cronograma
pessoal contendo todas as etapas do trabalho e aproximadamente o tempo de execução das
mesmas. Pode-se observar que no decorrer da pesquisa, alguns itens demandaram mais
tempo que os outros, mas seguindo o cronograma estabelecido desde o início, o projeto
sempre manteve os objetivos específicos de uma forma clara e bem concisa.
Após uma pesquisa bibliográfica, principalmente sobre o foco do trabalho, que foi
domótica foram elaborados um caderno de especificações junto ao cliente e escolhido os
principais componentes. Fluxogramas sobre o controle remoto e o módulo acionador,
também foram elaborados para o maior entendimento das etapas que constariam o sistema
de automação de ambientes escolhido.
Em seguida, foi realizado um estudo em diversos datasheets, para cada bloco do
controle remoto e do módulo acionador. Concluída essa etapa, iniciou-se a elaboração dos
circuitos necessários, utilizando algumas técnicas inovadoras comparadas aos outros
fabricantes. Após isso, foi necessário verificar o funcionamento de cada circuito através de
testes também divididos de acordo com as etapas apresentadas, para a validação dos blocos
implementados.

67
Concluídas todas essas etapas, o sistema foi integrado e testado através de uma jiga
de teste realizada em bancada, na qual verificou-se o funcionamento do controle remoto,
módulo acionador e do receptor infravermelho.
Todas as etapas citadas foram documentadas no decorrer dos trabalhos, para assim
auxiliar em possíveis publicações de artigos.
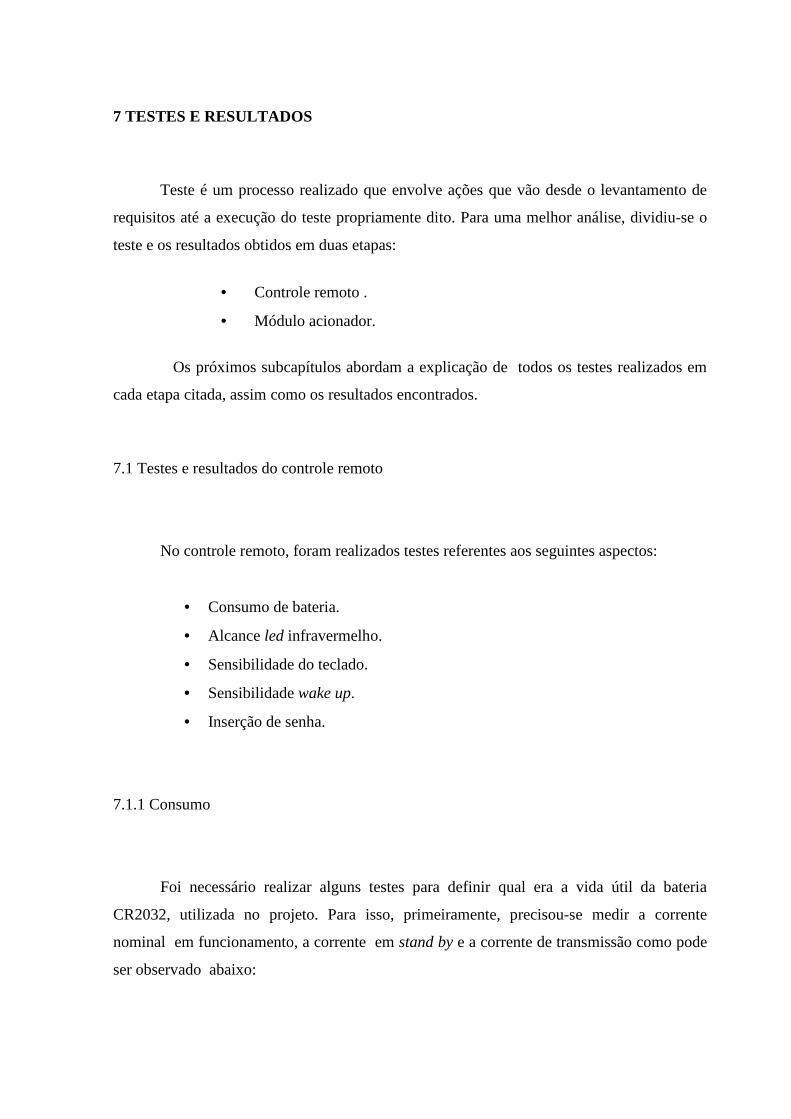
68
7 TESTES E RESULTADOS
Teste é um processo realizado que envolve ações que vão desde o levantamento de
requisitos até a execução do teste propriamente dito. Para uma melhor análise, dividiu-se o
teste e os resultados obtidos em duas etapas:
• Controle remoto .
• Módulo acionador.
Os próximos subcapítulos abordam a explicação de todos os testes realizados em
cada etapa citada, assim como os resultados encontrados.
7.1 Testes e resultados do controle remoto
No controle remoto, foram realizados testes referentes aos seguintes aspectos:
• Consumo de bateria.
• Alcance led infravermelho.
• Sensibilidade do teclado.
• Sensibilidade wake up.
• Inserção de senha.
7.1.1 Consumo
Foi necessário realizar alguns testes para definir qual era a vida útil da bateria
CR2032, utilizada no projeto. Para isso, primeiramente, precisou-se medir a corrente
nominal em funcionamento, a corrente em stand by e a corrente de transmissão como pode
ser observado abaixo:

69
• In = 7mA.
• Isb = 10uA.
• Itx = 25mA.
Além disso, foi necessário obter o ponto de tensão de corte do componente mais
sensível. Nesse caso o microcontrolador ATtinny 2313.
Através do datasheet da bateria, foi possível obter algumas informações, como se
pode observar na Figura 38.
FIGURA 38- Características de temperatura bateria CR2032.
A temperatura adotada foi a de 20 graus Celsius.
Além disso, foi utilizado um equacionamento matemático para calcular qual a vida
útil da bateria:

70
Tbateria = (consumo ligado X tempo controle ligado sem tx) X (%tempo
controle ligado sem tx) + (consumo tx X tempo controle transmitindo) X
(%tempo controle transmitindo) + (consumo hibernando X tempo do controle
hibernando) X (%tempo do controle hibernando)
Os dados podem ser observados na Tabela 03:
TABELA 03 – Dados do consumo da bateria.
Controle ligado, sem transmitir
tempo= 0,5 Horas
consumo= 10 mA
Controle transmitindo
Número de atuações= 50 Unidades
consumo= 40 mA
Controle em hibernação
tempo= 23,5 Horas
consumo= 18 uA
Através desse equacionamento, obteve-se uma duração de:
• Consumo médio do controle em um dia:0,5183542 mAh.
• Percentual consumido em 1 dia com relação à capacidade da bateria
CR2032: 0,22%.
• Autonomia: 463 dias, aproximadamente 15 meses.
7.1.2 Alcance
Para determinar o alcance do sistema, foi necessário montar o ambiente de testes
conforme mostra a Figura 39.
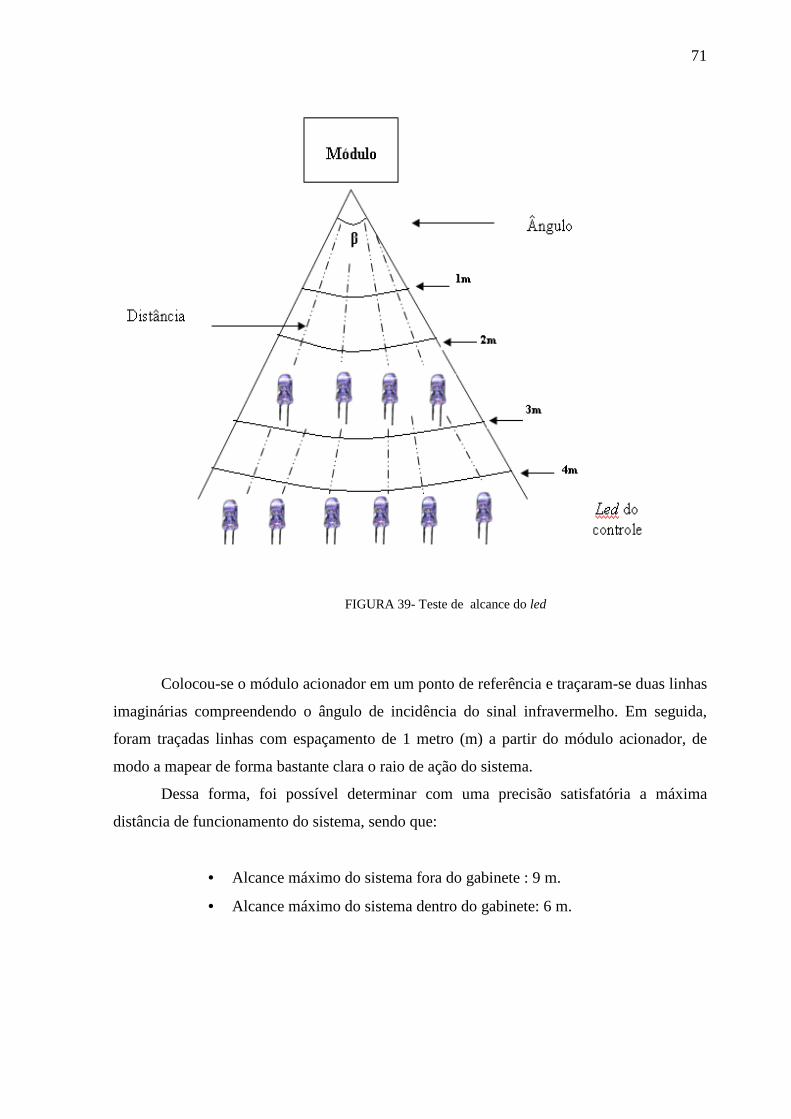
71
FIGURA 39- Teste de alcance do led
Colocou-se o módulo acionador em um ponto de referência e traçaram-se duas linhas
imaginárias compreendendo o ângulo de incidência do sinal infravermelho. Em seguida,
foram traçadas linhas com espaçamento de 1 metro (m) a partir do módulo acionador, de
modo a mapear de forma bastante clara o raio de ação do sistema.
Dessa forma, foi possível determinar com uma precisão satisfatória a máxima
distância de funcionamento do sistema, sendo que:
• Alcance máximo do sistema fora do gabinete : 9 m.
• Alcance máximo do sistema dentro do gabinete: 6 m.

72
7.1.3 Sensibilidade do teclado
O ajuste da sensibilidade do teclado é extremamente suscetível a dois fatores:
• Distância entre célula capacitiva e o gabinete mecânica.
• Material de composição do gabinete.
Por esse motivo, não existe uma maneira precisa de calcular os capacitores
responsáveis pelo ajuste da sensibilidade, sendo necessário aplicar a sistemática de tentativa
e erro para encontrar o ajuste ideal.
Assim, partiu-se dos valores recomendados pelos circuitos de aplicação fornecidos
pelo fabricante e, num primeiro momento, o ajuste foi realizado considerando apenas a
superfície da placa nua, conforme mostra a Figura 40.
FIGURA 40 - Ajuste da sensibilidade do teclado : placa nua.

73
Vencida essa etapa, partiu-se para o ajuste do circuito eletrônico com a placa dentro
do gabinete, mostrado na Figura 41, considerando que o valor do capacitor é inversamente
proporcional à sensibilidade, ou seja, quanto menor o capacitor de ajuste, mais sensível a
tecla.
FIGURA 41- Gabinete do controle remoto.
7.1.4 Sensibilidade wake up
O ajuste do circuito de wake up ocorre da mesma maneira descrita para o teclado,
considerando apenas que a célula capacitiva aparece na forma de barras metálicas,
posicionadas estrategicamente nos lados do gabinete para que a placa seja “acordada”
quanto o usuário manuseia o controle remoto.
Nesse caso, vale a mesma lógica anterior, onde a sensibilidade é inversamente
proporcional ao valor do capacitor.
Nesse ajuste, também foi previsto que o controle remoto não ligaria quando colocado
dentro do bolso do usuário, garantindo maior autonomia em relação à bateria.
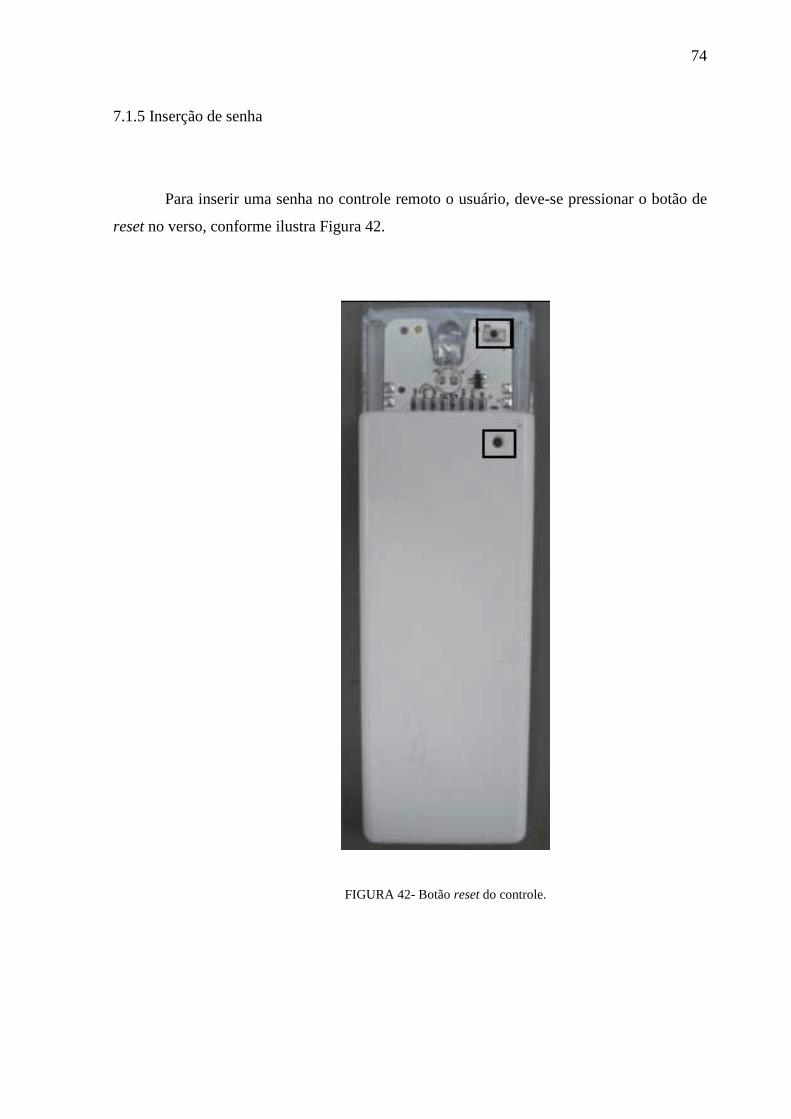
74
7.1.5 Inserção de senha
Para inserir uma senha no controle remoto o usuário, deve-se pressionar o botão de
reset no verso, conforme ilustra Figura 42.
FIGURA 42- Botão reset do controle.

75
Além disso, é necessário que o usuário pressione por 3 segundos o botão que se
encontra no circuito receptor infravermelho, conforme mostra na Figura 43, no qual
acenderá um led verde indicando que está pronto para receber uma senha.
FIGURA 43- Botão reset do receptor infravermelho .
A senha é composta por quatro dígitos. O usuário deve inserir um a um através do
controle remoto, sendo que, a cada dígito inserido, um led irá piscar no ícone da Oneon. Ao
final da inserção, o ícone acenderá indicando que a senha foi memorizada.
O teste propriamente dito foi feito tentando acionar as cargas conectadas a um
módulo acionador com a senha devidamente configurada e um controle remoto em qualquer
tipo de configuração. Nesse teste, foi possível detectar a chegada do sinal do controle remoto
no módulo acionador, porém, durante o tratamento de firmware o comando era descartado,
confirmando a eficácia do sistema.
76
7.2 Testes e resultados do módulo acionador
No módulo acionador, foram realizados testes referentes a:
• Segurança.
• Condições agressivas (calor).
• Interruptor pulsador.
Os próximos subcapítulos abordam a explicação de todos os testes realizados em
cada etapa citada, assim como os resultados obtidos
7.2.1 Segurança
Um dos pontos fundamentais do projeto é garantir que o produto não coloque em
risco a segurança dos usuários. Por esse motivo, foi dimensionado um fusível com o intuito
de evitar que o módulo acionador inflame mediante uma situação de corrente ou até mesmo
uma corrente de curto circuito. Assim, considerando a corrente nominal máxima de
operação, uma corrente de curto circuito da ordem de 400% do valor da corrente nominal, e
a possibilidade do usuário utilizar uma carga indutiva no módulo acionador, que gere picos
elevados de corrente e pede a utilização de um elemento de proteção não muito rápido, foi
dimensionado um fusível para a proteção do sistema. Visando conferir a eficiência desse
fusível, foi montada uma jiga de testes que permitia a conexão de diversos dispositivos
como lâmpadas, ventiladores e condicionadores de ar, conforme ilustra Figura 44.

77
FIGURA 44- Jiga de testes: lâmpada.
Dessa forma, foi possível atingir a corrente de atuação do fusível, constatando a sua
atuação antes que alguma parte do equipamento significasse um eventual risco ao usuário.
7.2.2 Condições agressivas (calor)
Como todos os testes realizados até esse momento foram realizados em ambiente de
bancada, com temperatura controlada e condições um tanto quanto diferentes daquelas
encontradas dentro de uma arandela, fez-se necessário um teste com condições mais
próximas das reais.
Para isso, foram vedadas todas as entradas de ar do gabinete, impedindo qualquer
tipo de circulação de ar. Foi usado também isolante térmico, impedindo ao máximo que a
placa eletrônica trocasse calor com o ambiente externo.
Esse ambiente relativamente mais agressivo, provocou um superaquecimento na
fonte de alimentação, que desencadeou uma instabilidade no microcontrolador.
Foi necessário um reprojeto da fonte, diminuindo a potência dissipada nos diodos
retificadores e reduzindo consideravelmente a temperatura do sistema. Os módulos
78
acionadores atuais que estão em testes de campo há dois meses demonstraram que o
problema foi resolvido.
7.2.3 Interruptor pulsador
Nesse teste, foi conectado um interruptor pulsador na recepção do módulo acionador
e verificou-se o acionamento das cargas sem a intervenção do controle remoto. Vale
ressaltar que nesse tipo de atuação, não existe a possibilidade de dimensionar a intensidade
do acionamento, apenas os estados ligado e desligado.
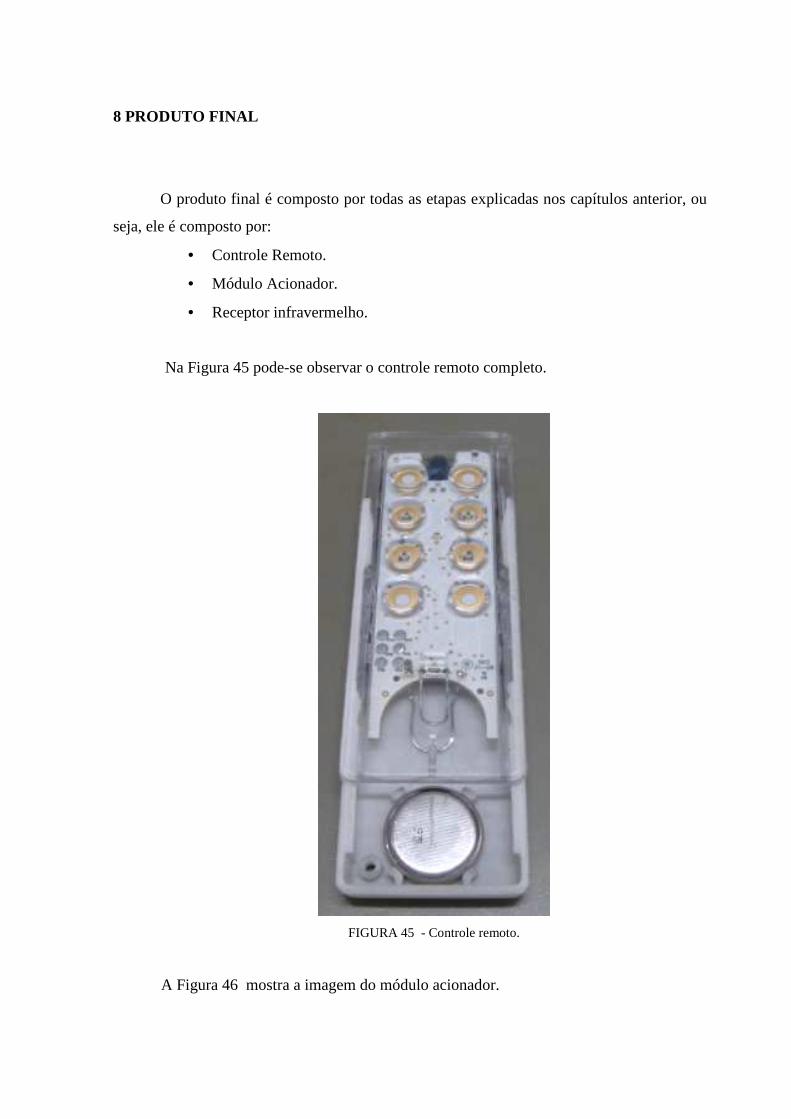
79
8 PRODUTO FINAL
O produto final é composto por todas as etapas explicadas nos capítulos anterior, ou
seja, ele é composto por:
• Controle Remoto.
• Módulo Acionador.
• Receptor infravermelho.
Na Figura 45 pode-se observar o controle remoto completo.
FIGURA 45 - Controle remoto.
A Figura 46 mostra a imagem do módulo acionador.

80
FIGURA 46 - Módulo acionador..
O receptor infravermelho pode ser observado na Figura 47.
FIGURA 47 - Receptor infravermelho.

81
9 CONSIDERAÇÕES FINAIS
A maioria das soluções em automação residencial prioriza os aspectos tecnológicos
ao invés de priorizar aspectos que melhorem o dia a dia das pessoas, não dando a atenção
necessária aos valores que realmente satisfazem os clientes. Os produtos encontrados no
mercado possuem custo elevado, necessitam de projetos complexos, reformas custosas e
conhecimento avançado do usuário para o uso adequado, tornando a relação custo -
beneficio deste tipo de solução pouco atraente. A oportunidade está em aproveitar a
tendência de crescimento do setor da construção civil no Brasil e da busca pela
personalização dos ambientes, para inserir novos produtos de automação residencial, mais
acessíveis, fáceis de usar e com instalação simplificada em empreendimentos imobiliários.
O principal objetivo deste trabalho foi obtido com sucesso, pois foi desenvolvido um
sistema de automação de ambientes no qual novas técnicas, como células capacitivas, foram
aprendidas.
Esta pesquisa foi desenvolvida aproximadamente durante um ano, a fim de que o
usuário controlasse o acionamento de luzes, ventiladores e outros aparelhos eletrônicos,
através de um controle remoto de uso pessoal que é composto, além disso, por um módulo
acionador e um receptor infravermelho. Para uma melhor compreensão, o trabalho foi
dividido em três etapas: estrutura geral com os periféricos do controle remoto, estrutura
geral do módulo acionador com todos os blocos de sua arquitetura e, testes e resultados em
cada etapa para validação das mesmas.
Primeiramente, analisando o controle remoto, pôde-se observar que a principal
interface com o usuário é o teclado capacitivo sensível ao toque, que o usuário pode ativar
ou desativar a iluminação, comandar um dispositivo, habilitar ou desabilitar a senha,
configurar senha e função do módulo acionador e trocar a bateria. Um outro ponto
importante foi a diminuição do consumo de bateria, através de um circuito de wake up, que
nada mais é que duas chapas metálicas colocadas nas extremidades do controle, nas quais,
somente quando o usuário “abraçar” o controle com a mão é que o ativará . Os testes
realizados no controle remoto comprovaram a eficiência de todos os blocos validando-os.
No módulo acionador, um dos pontos interessantes foi o uso de fonte de alimentação
sem a utilização de transformador. Os testes também comprovaram a eficiência de todos os
blocos compostos pelo módulo acionador.

82
Para uma maior visibilidade das etapas do sistema de automação de ambientes, fotos
foram inseridas no desenvolvimento do projeto, assim como fluxogramas e tabelas.
O mercado de automação residencial ainda é uma criança, abrigando diversas novas
oportunidade de negócio, foi estimada para os próximos anos um movimento de bilhões de
dólares para este mercado, e empresas como Microsoft, Ericson, Intel, Echelon, Siemens,
Sony, Phillips e muitas outras estão abrindo seu campo de pesquisa e criando seus próprios
padrões de implementação de sistema de automação residencial.
Ao final da pesquisa, pôde-se concluir que a domótica está em crescimento, ainda,
com poucos protocolos bem definidos.
Assim, encerra-se este trabalho de modo que todos os objetivos propostos foram
realizados e os resultados obtidos foram satisfatórios.

83
REFERÊNCIAS ABREU, Roterdan S. Automacao_residencial.ppt: automação residencial, um pouco de história. Ribeirão Preto, 2003. 46 eslaides, color. PowerPoint for Windows 10.26. Arquivo baixado da Internet. Disponível em: <http://www.aureside.org.br/publicacoes/download/automacao_residencial.zip>. Acesso em: 2 mar. 2010. AGOSTINI, Renata. Apartamentos Inteligentes. Disponível em: http://www.aureside.org.br/imprensa/default.asp?file=45.asp. Acesso em: 12 jan. 2010. AMORY, Alexandre; PETRINI, Alexandre. 2001, 142f. Sistema Integrado e Multiplataforma para Controle Remoto de Residências. Trabalho de Conclusão de Curso (Bacharelado em Informática) – Pontifícia Universidade Católica do Rio Grande do Sul. ANGEL, Patrícia Marta. Introducción a la domótica: tomo I. Embalse: EBAI, 1993. BOGART, Jr., THEODORE F., Dispositivos e circuitos eletrônicos , Volume II, São Paulo: Makron Books, 2001. CORCUERA CAVALCANTI. Arquiteturas e Automação, URL: <http://www.corcueracavalcanti.com.br> Acessado em: 2 mar. 2010. LAKATOS, Eva Maria; MARCONI, Mariana de A..Metodologia do Trabalho Científico: procedimentos básicos, pesquisa bibliográfica, projeto e relatório, publicações e trabalhos científicos. 6. ed. São Paulo: Atlas, 2001. MINAYO, M.C. de Sousza. Pesquisa social: teoria, método e criatividade. Petrópolis: Vozes, 1994. Disponível em: http://www.newtoncbraga.com.br/index.php/almanaque/667-curva-caracteristica-de-um-triac.html. Acesso em: 11 mar. 2010. Disponível em : http://www.mspc.eng.br/eletrn/fontes_110.shtml. Acesso em: 3 mai. 2010. Disponível em: www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=2600¶m=en535168. Data de acesso: 5 abr. 2010

84
Disponível em: http://www.aureside.org.br/. Acesso em: 27 abr. 2010.
Disponível em: www.atmel.com/dyn/resources/prod_documents/doc2543.PDF. Acesso em: 2 fev. 2010. Disponível em: www.kevin.org/frc/2004/TSOP34840.pdf. Acesso em: 4 mar. 2010. Disponível em: www.alldatasheet.co.kr/datasheet.../QUANTUM/QT1081.html. Acesso em: 4 mar. 2010.
Disponível em: www.alldatasheet.com/datasheet.../MOTOROLA/MOC3051.html. Acesso
em: 22 abr. 2010.

85
BIBIOGRAFIA COMPLEMENTAR ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 14724: Informações e documentações – Referências – Elaboração. Rio de Janeiro,2005.24p. BRETERNITZ Vivaldo José. Domótica: as casas inteligentes. jun. 2001. Disponível em: <http://www.widebiz.com.br/gente/vivaldo/domotica.html>. Acesso: em 21 fev. 2010. SEVERINO, A. Joaquim. Metodologia do Trabalho Cientifico. Ed. Cortez. 22ª Edição – 2002. Disponível em : http://translate.google.com.br/translate?hl=pt-BR&sl=en&u=http://www.planetanalog.com/features/showArticle.jhtml%3FarticleID%3D181401898&ei=-ArzS9uxAs-JuAfin4TPDQ&sa=X&oi=translate&ct=result&resnum=1&ved=0CCIQ7gEwAA&prev=/search%3Fq%3DCapacitive%2BTouch%2BSensing%26hl%3Dpt-BR%26prmd%3Div. Acesso em: 5 abr. 2010. Disponível em: http://www.mecatronicaatual.com.br/secoes/leitura/236. Acesso em: 25 mar. 2010.
86
ANEXOS

87
ANEXO A- Módulo Acionador e Controle Remoto

88
ANEXO B – Jiga de testes do controle remoto.

89
ANEXO C- Jiga de testes do módulo acionador: conexão com lâmpadas.

90
ANEXO D- Jiga de testes do módulo: conexão com ar condicionado
.

91
ANEXO E- Jiga de testes do módulo acionador: conexão com ventilador.
Top Related