







Languages
Pages
Legal


Resolución de Problemas
Electrónica General y Aplicada
Desarrollo de soluciones en forma
ordenada

CONFEDI
COMPETENCIAS GENÉRICAS EN LA
FORMACION DE INGENIEROS
Competencias tecnologicas
Competencia para identificar, formular y
resolver problemas de ingeniería
( Saber hacer)
Electrónica General y Aplicada

La actividad que permite sistematizar, unificar
y describir los procedimientos que resuelven
problemas de la ingeniería es la
ALGORITMIA.
En su definición se incluyen verbos
característicos como: formular, analizar,
procesar, sintetizar, reflexionar y modelar
Electrónica General y Aplicada
DISCIPLINAS CONCURRENTES
LÓGICA
*Para desarrollar estructuras de razonamiento que permitan
construir un modelo funcional de un sistema tecnológico.
SEMIÓTICA
* Para la representación y comunicación mediante un lenguaje
SISTÉMICA
* Para caracterizar un problemas tecnológicos relacionado su
entorno, composición, estructura, vínculos internos,
condiciones iniciales y variables externos de entradas/salidas.
Electrónica General y Aplicada

RESOLUCIÓN DE PROBLEMAS
Actividades
1.- Planteo del Problema: Interpretación de requerimientos, variables y
constantes, condiciones iniciales y restricciones. Objetos tecnológicos
componentes del sistema. Síntesis sistémica
2.- Solución: Desarrollo del algoritmo que resuelve el problema. Representación
de la solución por un modelo aritmético, textual o gráfico.
3.- Modelo Funcional : Representanción de interelacion funcional entre los
objetos y la secuencia lógica en la evolución temporal
4.- Simulación Dinámica: Validación del modelo y optimización
5.- Programación y Traslación: Codificación y ejecución en procesador real.
Electrónica General y Aplicada

Electrónica General y Aplicada
APLICACIONES
• Cuadrado de un número entero positivo
• Montacarga para dos plantas
• Semáforo para automóviles y peatones
Electrónica General y Aplicada
Cuadrado de un número entero positivo
“Calcular el cuadrado de un número entero, positivo, mayor
que cero, utilizando solo suma aritmética”
¿ Que se pide? / ¿ Datos de partida?
¿Cuál son Incógnitas? / ¿Cuáles son Constantes?
¿Cuáles son Variables? / ¿Hay condiciones iniciales?
¿Hay Restricciones? ¿Qué resultados se esperan obtener?
1. EL PROBLEMA (Planteo)

Electrónica General y Aplicada Cuadrado de un número entero positivo
Datos: D (Nro. entero, positivo, mayor a cero)
Valores iniciales: C = 1 para D = 1
Resultado: C = D x D
Restricción : solo sumas
?
C D
Input
Diagrama Sistémico
Output
?
Caja Negra

Electrónica General y Aplicada
2. LA SOLUCIÓN (Modelo operativo/Algoritmo )
• Desarrollo de un Modelo Funcional y Operativo
• Validez y consistencia del Modelo.
• Representación por una fórmula, texto o gráfico
Cuadrado de: Resultado Generar impares
1 1 1
2 4 =1+3 3=2+2-1
3 9 =4+5 5=3+3 -1
4 16 =9+7 7=4+4 -1
5 25 =16+9 9=5+5 -1
Cn : Cuadrado nuevo Ca : Cuadrado anterior
Cn = Ca + (n + n – 1) (Modelo Aritmético)
para n = 1,2,3,4, …D valor inicial Ca=0 para n=1

Electrónica General y Aplicada
3. MODELO FUNCIONAL (Textual o Gráfico)
3.1Textual (Lenguaje natural)
Leer D
Hacer n = 1; Ca = 0
Calcular Cn = Ca + (n + n – 1)
Incrementar n en 1
SI n mayor que D entonces ir fin del SI
Sino Ca = Cn
Ir a Calcular
fin del SI
Imprimir Cn, “Fin”
Parar

Electrónica General y Aplicada
3,2Gráfico (Diagrama de Flujo)
Parar
D
n = 1
Ca=0
Cn = Ca + (n + n – 1)
n = n + 1
Si n >D Cn, “Fin”
No
Ca = Cn

Electrónica General y Aplicada
4. SIMULACION
( Automatización del Modelo Operativo /Programa)
• Tipo de Procesador (Hardware)
• Lenguaje de programación (Assembler, Basic, Grafcet, C, Pascal,…)
• Soportes y herramientas de programación.
• Recursos de simulación, depuración de errores y puesta a punto
• Ejecución en tiempo real
Electrónica General y Aplicada
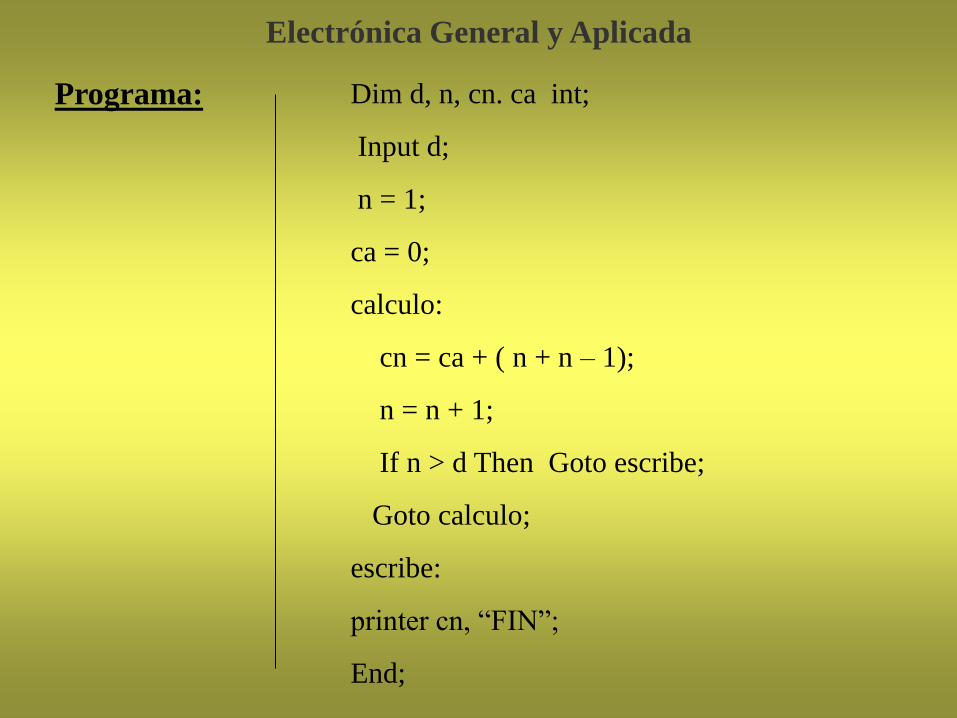
Dim d, n, cn. ca int;
Input d;
n = 1;
ca = 0;
calculo:
cn = ca + ( n + n – 1);
n = n + 1;
If n > d Then Goto escribe;
Goto calculo;
escribe:
printer cn, “FIN”;
End;
Programa:

Electrónica General y Aplicada
1. EL PROBLEMA (Planteo)
“Desarrollar el algoritmo que controle el funcionamiento de
un sistema de montacargas que se desplaza entre las plantas,
baja y alta”
• Con pulsadores PA y PB se llama al montacargas.
• Con fines de carrera FCS y FCI, se detiene en cada piso.
• Con motor eléctrico se realiza el ascenso y descenso
• El montacargas se inicia en planta baja
• Despues de corte de energía, continuar la tarea en curso.
Montacarga para dos plantas

Electrónica General y Aplicada
2. LA SOLUCIÓN (Modelo operativo o tecnológico/Algoritmo
Output
Input
Diagrama Sistémico
PA
PB
FCS
FCI
Subir
Bajar
?
Subir
Diagrama Tecnológico
PB
PA
Bajar M
FCI
FCS
Caja
? Caja negra (Controlador)

Electrónica General y Aplicada
• Tabla de características de Entradas/Salidas
• La dirección absoluta depende del tipo de Controlador a utilizar.
REGISTRO de SEÑALES DE ENTRADA-SALIDA
DIRECCION
ABSOLUTA (1)
DIRECCION
SIMBOLICA
TIPO
DATO
VALOR
INICIAL
COMENTARIO
I0.1 PA BOOL 0 Pulsador Planta Alta
I0.2 PB BOOL 0 Pulsador Planta Baja
I0.3 FCS BOOL 0 Fin de carrera Superior
I0.4 FCI BOOL 1 Fin de carrera Inferior
Q0.2 Bajar BOOL 0 Acciona Motor Abajo
Q0.3 Subir BOOL 0 Acciona Motor Arriba
(1) Según el Procesador o Controlador que se utilice

Electrónica General y Aplicada
Subir = 0, Bajar = 0
PA = 1 and
FCI = 1
Subir = 1
FCS = 1
PB = 1 and
FCSI = 1
Bajar =1
FCI = 1
NO
NO
NO NO
SI
SI
SI SI
INICIO
Espera 60 seg.
Estado
Estado
Estado
Transición
Transición
3. MODELO FUNCIONAL (Gráfico)

Electrónica General y Aplicada
0
1 2 Q0.2 (Bajar)
I0.1 . I0.4
(PA . FCI)
I0.3
(FCS)
Q0.3 (Subir)
I0.2 . I0.3
(PB . FCS)
Estado
Transición
Estado
Transición
I0.3
(FCS)
3 Delay Estado
Fin
Modelo Gráfico ( Estado y Transiciones / GRAFCET(1) )
(1) Orientado a Controladores PLC (Programmable Logic Controller)
Electrónica General y Aplicada
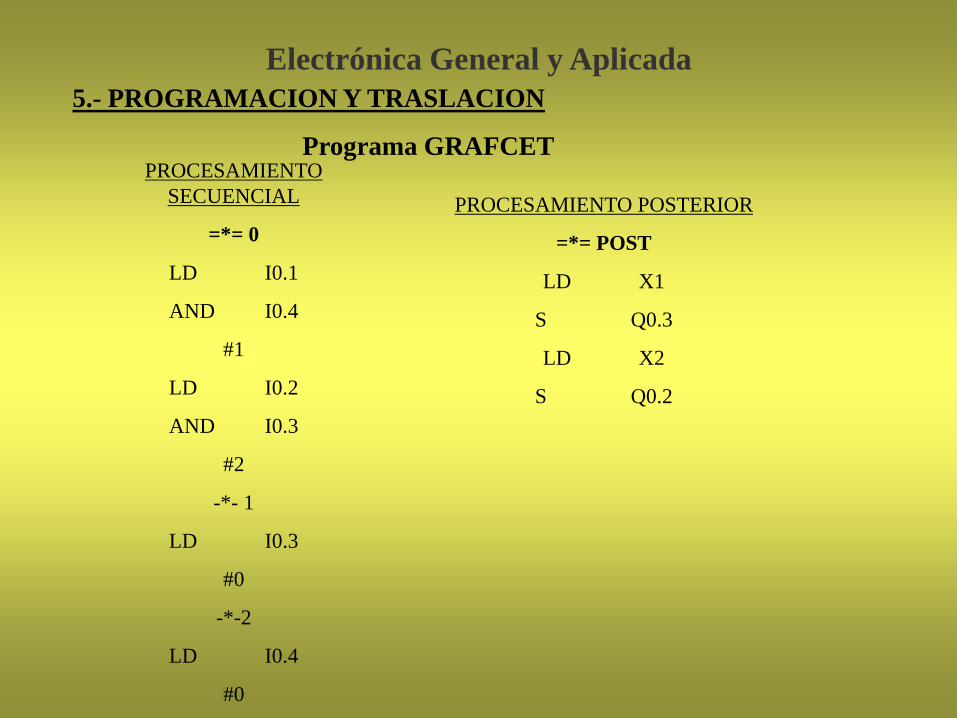
PROCESAMIENTO
SECUENCIAL
=*= 0
LD I0.1
AND I0.4
#1
LD I0.2
AND I0.3
#2
-*- 1
LD I0.3
#0
-*-2
LD I0.4
#0
PROCESAMIENTO POSTERIOR
=*= POST
LD X1
S Q0.3
LD X2
S Q0.2
5.- PROGRAMACION Y TRASLACION
Programa GRAFCET

Electrónica General y Aplicada
Proyecto: Semáforo para automóviles y peatones
1. EL PROBLEMA (Planteo)
“Desarrollar un algoritmo que controle la secuencia de luces de un
sistema semafórico para una calle de doble mano y un cruce
peatonal de dos direcciones.”
• Semáforo Auto: V1(verde), A1(Amarillo) y R1(Rojo), con tiempos de
duración T1,T2,T3.
• Semáforo Peatón: V2(verde) y R2(Rojo), con tiempos T4 y T5.
• El semáforo Auto, normalmente esta Verde o Amarillo titilante (LL).
• El semáforo Peatón, normalmente está en Rojo; para cruzar digitar un
pulsador (PP); pone Rojo a los autos y Verde al peatón. V2 titila (Alerta)
durante 10seg. adicionales a T4.
• Despues del paso del peaton, todo vuelve al estado normal.

Electrónica General y Aplicada
Output
Input
Diagrama Sistémico
PP
LL
V1
A1
? R1
V2
R2
Diagrama Tecnológico
2. LA SOLUCIÓN (Desarrollar un Modelo Operativo/Algoritmo)
? Controlador del Sistema : Microcontrolador PIC o PLC (Programmable
Logic Controller)

Electrónica General y Aplicada Mirocontrolador PIC 16F648A
ENTRADAS/SALIDAS: PortA (RA0,…..,RA7) / PortB (RB0,…,RB7)
COMUNICACIÓN : RX (Recibe), TX (Recibe)
Electrónica General y Aplicada
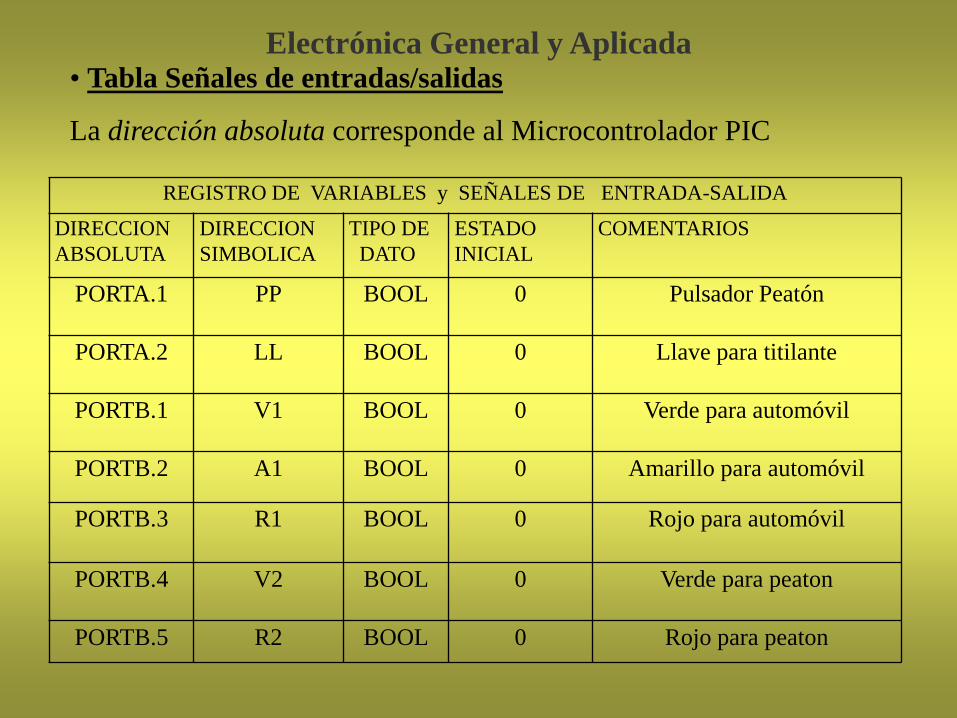
REGISTRO DE VARIABLES y SEÑALES DE ENTRADA-SALIDA
DIRECCION
ABSOLUTA
DIRECCION
SIMBOLICA
TIPO DE
DATO
ESTADO
INICIAL
COMENTARIOS
PORTA.1 PP BOOL 0 Pulsador Peatón
PORTA.2 LL BOOL 0 Llave para titilante
PORTB.1 V1 BOOL 0 Verde para automóvil
PORTB.2 A1 BOOL 0 Amarillo para automóvil
PORTB.3 R1 BOOL 0 Rojo para automóvil
PORTB.4 V2 BOOL 0 Verde para peaton
PORTB.5 R2 BOOL 0 Rojo para peaton
• Tabla Señales de entradas/salidas
La dirección absoluta corresponde al Microcontrolador PIC

Electrónica General y Aplicada
Modelo Gráfico ( Diagrama de Estado)
N
O
R
M
A
L
Normal
Peatón LL = 0 LL = 1
PP = 1
PP = 1 Titilante
3. MODELO FUNCIONAL

Electrónica General y Aplicada
5. PROGRAMACION Y TRASLACION
•Automatización del modelo operativo o tecnológico / Programa
Tipo de procesador (Hardware) – PIC 16F648A
Lenguaje de programación (Assembler, Basic, Basic, C, Pascal)
Soportes y herramientas de programación (PIC Simulator IDE)
*******************************************
'----------------------------PROGRAMA--------------------------------
Dim total As Word
Dim aux As Byte
Dim t2 As Word 'Duración Amarillo AUTO
Dim t4 As Word 'Duración Verde PEATON
Dim pulsa As Bit
Dim kont As Byte
Dim kontp As Byte
'--------------Valores Iniciales--------------
urs = "5" 'Nro. Unidad Remota Semafórica(URS)
t2 = 1000 'RA0.A1/Amarillo_AUTO <--------Ajustable
t4 = 8000 'RB6.V2/Verde_PEATON <--------Ajustable
estado = 0
pulsa = 0
Electrónica General y Aplicada
COMUNICACIÓN ENTRE SISTEMAS

Electrónica General y Aplicada
DTE DTE DCE DCE RED / CANAL
DTE: EquipoTerminal de Datos
DCE: Equipo de Comunicación de Datos
Delimitador Delimitador Control Información
Verificador
de errores
Formato de los mensajes (tramas de comunicación)
COMUNICACIÓN ENTRE SISTEMAS
Electrónica General y Aplicada
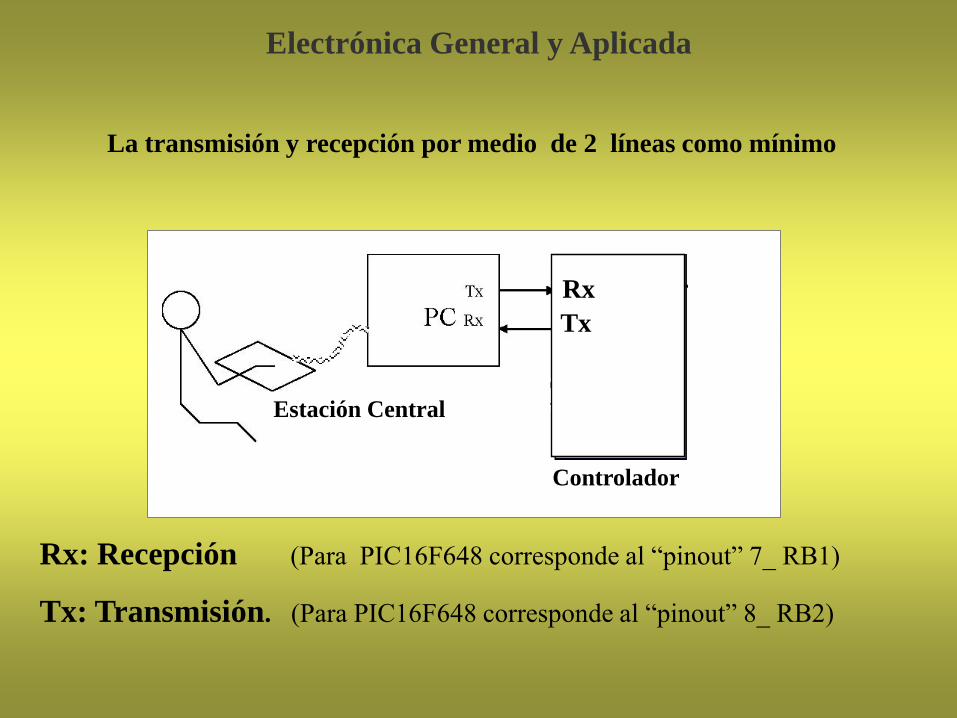
La transmisión y recepción por medio de 2 líneas como mínimo
Rx: Recepción (Para PIC16F648 corresponde al “pinout” 7_ RB1)
Tx: Transmisión. (Para PIC16F648 corresponde al “pinout” 8_ RB2)
Estación Central
Rx
Tx
Estación Central
Controlador
Rx
Tx

Electrónica General y Aplicada Direccionamiento:

Electrónica General y Aplicada
Direccionamiento:
( DIP switch ).

Electrónica General y Aplicada
Trama para modificar tiempos
INICIO carácter “:” (ASCII 58)
[destinatario] carácteres de “1” hasta “F”
[Tiempo a modificar] caracteres ”T1”, T2” y ”T4”.
[segundos] número en segundos de “01” a “99”.
[FIN] carácter <CR> (Carrier Return, ASCII 13).
Ejemplo: “:8T423<CR>” (Envía Estación Central)
(Unidad 8, tiempo T4 vale 23 segundos)
“:8T423<CR>” (Responde equipo remoto con eco)

Electrónica General y Aplicada
Comando Inicio de secuencia: “I”.
Ejemplo: “:3A<CR>” Alerta para la esquina “3”.
Ejemplo: “:0A<CR>” Todos en Alerta (Broadcasting)
Nota: Con “0” nadie contesta)
Ejemplo: “:5I<CR>” (Envía Estación Central)
(Unidad 5, inicia secuencia Normal)
“:5I<CR>” (Responde remoto5 con eco)

Electrónica General y Aplicada
INTERRUPCIONES en CONTROLADORES
(Sistemas de EVENTOS DISCRETOS)

Electrónica General y Aplicada
INTERRUPCIONES
Rutina de
Servicio
Programa
Principal
Return
PC
SR
------
Memoria de pila (Stack) /LIFO
Evento
discreto
PORTB.4=1
W
Rutina Servicio de
Interrupción
Registros del Controlador

Electrónica General y Aplicada
Banderas (Flag)
Para RB0/INT la bandera es INTF (Bit1)
Parar los pines RB4 a RB7, es RBIF (Bit0)
Para TMR0, es T0IF (Bit2)
Para la EEPR0M, es EEIF (Bit4)
Interrupciones. Básicas (Externas e Internas / PIC16F84)
Por pin RB0/INT,( externa).
Por pines RB4 a RB7 como entradas, si cambian de estado (externa).
Por desborde del registro TMR0, al pasar de 255 (interna).
Por completar escritura de la EEPROM de datos (interna).
Cada interrupción activa un bit de bandera (Flag) de 0 a 1

Electrónica General y Aplicada
REGISTRO INTCON
GIE EEIE T0IE INTE RBIE T0IF INTF RBIF
En el registro INTCON, se habilitan y registran las interrupciónes
HABILITACION
b0 b7
BANDERAS
(Solo 3 Flag)

Electrónica General y Aplicada
Las interrupciones se habilitan o deshabilitan, según el problema
Diagrama lógico de interrupciones

Electrónica General y Aplicada
MODELO FUNCIONAL (Sin interrupciones)
DIAGRAMA DE ESTADO
TITILA
NORMAL
PEATON LL = 0 LL = 1
PP = 1
PP = 1
Referencias
PP Pulsador Peatón
LL Llave
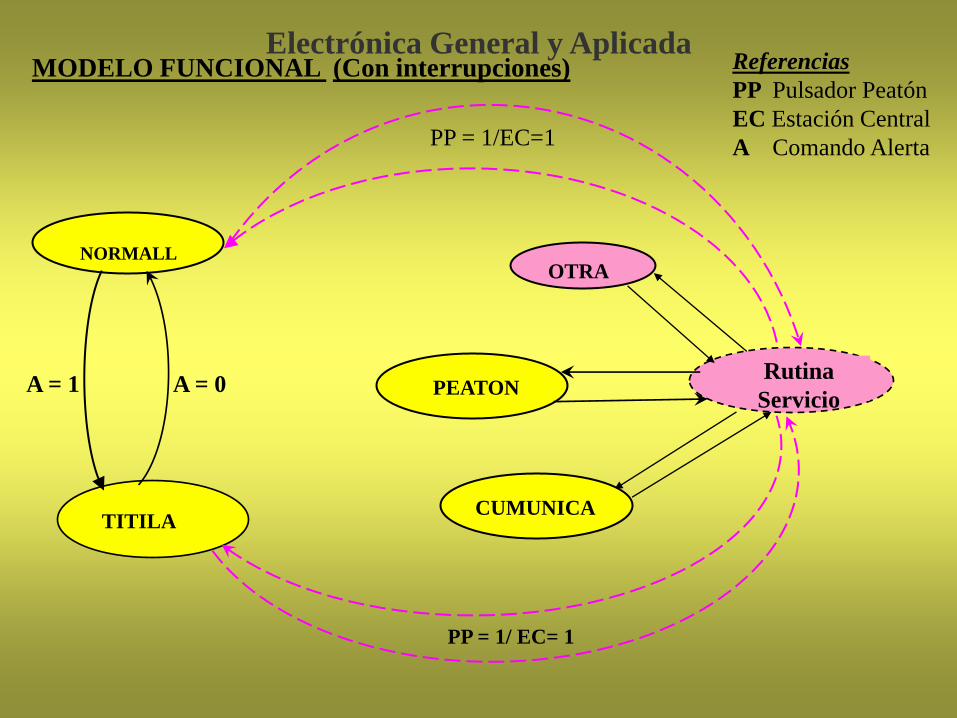
Electrónica General y Aplicada
TITILA
NORMALL
PEATON Rutina
Servicio
A = 0 A = 1
PP = 1/EC=1
OTRA
CUMUNICA
PP = 1/ EC= 1
Referencias
PP Pulsador Peatón
EC Estación Central
A Comando Alerta
MODELO FUNCIONAL (Con interrupciones)

‘ Inicialización -----------
-----------
main:
‘Estado Normal
normal: -----------
------------
Goto normal
‘Estado Alerta/Titilante
titila: -----------
-----------
Goto titila
End
On Interrupt
Save System
If INTCON.INTF Then
Gosub peaton
INTCON.INTF = 0
Resume
Endif
Gosub comunica
PIR1.RCIF = 0
Resume
‘ Subprogramas
peaton: -----------
Return
comunica: -----------
Return
Prog. Ppal y Rut. de Servicio Inter.
(Flag EC a 0)

Electrónica General y Aplicada
Gosub inicio‘ Iniciar proceso
Guarda Registros
Espera un byte
On Interrupt
Hserin aux ‘Guarda en aux
Save System
Gosub parada‘ Parar proceso
Ejemplo
1. Interrupción por comunicación
: 4 I cr lf / : 4 P cr lf
Fin Interrupt Resume
Flag Interr. = 0 PIR1.RCIF = 0 ‘ Borra flag
NO
SI
SI
Envía mensaje
SI
Espera un byte Hserin aux ‘Guarda en aux
aux = urs ?
Espera un byte
aux = I ?
Hserin aux ‘Guarda en aux
NO
aux = P ?
NO
SI
Hserout “ErrorCódigo”, CrLf ‘
aux = :?
NO
Parada
Inicio
(urs : variable global, identifica Nro. remota)
(aux : variable global de usogeneral)
Servicio Interrupt *
*
*
*
*
*
*
*
* Instrucciones especiales
Servicio de Interrupción

Electrónica General y Aplicada
Ejemplo
1. Interrupción por comunicación
: 4 I cr lf / : 4 p cr lf
2.Interrupción del proceso (RB0)
Activar alarmas
alarma
Guarda registros
Servicio Interrupt On Interrupt
Save System
Flag Interr. = 0 INTCON.INTF = 0 ‘Borra flag
Flag Interr. = 1?
SI
NO
Gosub alarmas ‘Disparo de alarmas
mensaje Gosub Comunica
Fin Interrupt Resume
Flag Interr. = 0 PIR1.RCIF = 0 ‘ Borra flag
*
*
*
* * Instrucciones especiales
*
Servicio de Interrupción
Electrónica General y Aplicada
F I N
Top Related