







Languages
Pages
Legal


Quadrotor Control By Policy Iteration With Signed Derivative
Conrado S. Miranda1 and Janito V. Ferreira1
Abstract— Proven stable algorithms, such as backstepping,use control constants that may be hard to tune, and eithermodel’s parameters or complex adaptive laws. However, prac-tical applications tend to use simpler controllers that are easierto understand and adjust, such as PID and LQR, although thetunning process may be cumbersome. Based on these simplercontrollers, this work presents a quadrotor controller thatdoesn’t require any vehicle’s parameters knowledge, demandingonly an initial parameter set to stabilize the system. Theseparameters are then adjusted to minimize a given cost function,automating the tunning process for each particular system.Results show that the quadrotor is able to hover and followa circular trajectory for a wide range of parameters. Thetechnique’s limitations and methods to improve performanceare discussed, and future extensions are proposed.
I. INTRODUCTION
In the area of aerial vehicles, quadrotors have been the
focus of many research topics [1], [2] due to their under-
actuated dynamics and miniaturization capabilities [3]. To
provide appropriate system’s behaviour, a good controller
must be used, and most of them can be classified in two
categories.
The first one comprises controllers with strong theoret-
ical stability guarantees for tracking position and heading
references. [4] uses a feedback linearization controller to
transform the quadrotor into a linear model, where classi-
cal techniques can be used. [5] builds a controller using
backstepping, which is extended as an adaptative controller
by [6] to allow the quadrotor’s mass to be unknown. [7]
presents another backstepping controller with added integral
terms for robustness, but considering small angles approxi-
mation. These techniques usually require knowledge of many
system’s parameters, which may be hard to measure, while
ignoring aerodynamic and motor effects, and demanding user
chosen parameters, which may be difficult to tune. In some
particular cases, robust controllers have been developed to
compensate for external disturbances and model uncertain-
ties [8], at the cost of introducing more parameters and
increasing the controller complexity. Despite the inherent
problems caused by model assumptions not being true,
such as unmodeled dynamics which may render the system
unstable even though the simplified model’s controller has
theoretical stability proof, the difficulty in defining their
parameters’ values is frequently used as rationale not to use
these controllers.
The other category is composed of well known traditional
controllers originally designed for linear systems control,
*This work was supported by FAPESP through the process 2012/01511-6.1Conrado S. Miranda and Janito V. Ferreira are with School of
Mechanical Engineering, University of Campinas, Campinas, SP, Brazilcmiranda,[email protected]
which are used on quadrotors with the assumption that the
errors are small and the linear approximation is reasonable.
[9] provides a comparison between PID and LQ controllers
for quadrotor control, and PIDs are used on other works
[10], [11], suggesting that simple controllers may be able to
successfully control such systems. Indeed these controllers
have been successfully used for many years in projects such
as the Paparazzi2, OpenPilot3, and AeroQuad4. One justifi-
cation for PIDs use is that they are simpler to understand,
making the parameter tunning process more intuitive while
time-consuming.
Besides these two categories, some algorithms based on
machine learning have been developed over the years mainly
focused on policy iteration, where a controller’s parameters
are modified to minimize a given cost. [12] shows that policy
iteration can be used to control a helicopter, although a
model must be used to simulate the real system. To solve
this problem, [13] introduced the idea of approximating the
gradient compute by the policy iteration using an approxi-
mate system’s behaviour called signed derivative.
In this paper, the signed derivative is used to adjust param-
eters for two biased PD controllers, one for the position and
another for the attitude, from initial stabilizing controllers.
The parameters are adjusted according to a user defined
quadratic cost function, so that previous knowledge from de-
signing LQ controllers can be used. This paper’s contribution
is that the parameter tunning, usually performed by hand, is
made online and automatic, requiring no user interaction or
vehicle’s parameters. This automatic adjustment allows for
much finer tunning, and adaptation to vehicle’s changes while
flying. The performance increase if the nominal propeller
parameters are known, as they are usually available from
the manufacturer and not subject to modifications, is also
investigated.
The sections are organized as follows. Section II describes
the complete quadrotor model used in the simulations to
validate the controller. Section III explains the underlying
controller used to track the desired trajectory. The signed
derivative algorithm is summarized in Sec. IV, and its use
on the quadrotor is elaborated in Sec. V. Section VI describes
how the experiments are performed, including parameter
generation and learning sequence, and Sec. VII shows the
results obtained for hovering and following circular trajec-
tories. Finally, Sec. VIII outlines the conclusions from the
experiments, and provides future research directions.
2paparazzi.enac.fr3www.openpilot.org4www.aeroquad.com

II. QUADROTOR MODEL
The quarotor has been the focus of many control re-
searches, but most models used tend to ignore real behaviour
like motor dynamics and aerodynamic effects, lending them-
selves unusable for realist simulations. However, there has
been some research on better models, like the problem
of understanding how to design better quadrotors [14] or
detailing the blade’s aerodynamic behaviour [11].
As this paper needs a good model to test many parameter
combinations, the model described by Bouabdallah [7], [15]
was chosen among others as a reference because it takes
into account many aerodynamic effects and rotor dynamics,
while also providing nominal values for all parameters for
an indoor quadrotor. This section is based on the quadrotor
model described in his works.
A. Aerodynamic Effects
The aerodynamic forces and moments presented in this
section were originally derived from blade element theory by
Gary Fay [16]. The symbols used and their meanings are: σ,
solidity ratio; a, lift slope; µ, advance ratio; λ, inflow ratio;
ρ, air density; R, rotor radius; A, rotor area; Ω, rotor speed;
θ0, pitch of incidence; θtw, twist pitch; Cd, drag coefficient
at 70% radial station.
The thrust force T , the hub force H , the drag moment Qand the rolling moment Rm for each propeller are given by:
T = CTρA(ΩR)2 (1a)
H = CHρA(ΩR)2 (1b)
Q = CQρA(ΩR)2R (1c)
Rm = CRmρA(ΩR)2R (1d)
CTσa
= (16 + 14µ
2)θ0 − (1 + µ2) θtw8 − 14λ (1e)
CHσa
= 14aµCd +
14λµ(θ0 − θtw
2 ) (1f)
CQσa
= 18a (1 + µ2)Cd + λ(16θ0 − 1
8θtw − 14λ) (1g)
CRmσa
= −µ(16θ0 − 18θtw − 1
8λ) (1h)
B. Rotor dynamics
The rotor is considered a brushless DC motor, whose
model can be approximated by a first order system [7], [15]
as:
Ω = 1τm
(−Ω+ kmΩdes) (2)
where τm and km are motor parameters, Ω is the rotor speed
and Ωdes is the speed requested by the controller.
C. Equations of motion
The model’s state used in this paper can be decomposed
as
x = [p,v,q, ω]T (3)
where p is the position, v is the linear velocity, q is the
quaternion for the current attitude, and ω is the angular
velocity.
The state is also split in two frames of reference I and
B, shown in Fig. 1, so that the controller design can be
simplified. Both the position and the linear velocity are
~xI
~yI
~zI
~xB
~yB
~zB
T1
Ω1
T3
Ω3
T4
Ω4
T2
Ω2
Fig. 1: The inertial I and body B frames used to describe
the quadrotor dynamics, with each propeller positive rotation
direction depicted.
represented in the inertial frame I, making them independent
of the system’s current attitude, while the angular velocity is
represented in the body frame B. The quaternion establishes
the relationship between the two frames through the equality
uI = R(q)uB , where uC is a vector represented in the frame
C and R(·) is a function that builds the rotation matrix for
a given quaternion.
The linear part of the state can be described by
p = v
v = −g~zI +1
m
R(q)~zB
4∑
i=1
Ti −
∑4i=1Hx,i
∑4i=1Hy,i
0
− Ff
where g is the gravity, m is the system’s mass, ~zC is the
unitary vector in the z direction of the frame C, Ti and Hj,i
are the forces for the i-th rotor computed by Eqs. (1a) and
(1b), respectively, and Ff is the air resistance force given by
Ff = [Ff,x, Ff,y, 0]T , Ff,i =
12CAcρvi|vi|
where vi is the component on the direction i of the relative
velocity between the body and the air, and C and Ac are the
body’s drag factor and area, respectively, assumed the same
for all directions.
The angular component of the state can be described by
q = 12q⊗ ω
ω = I−1 (−ω × Iω + τu + τH + τRm + τΩ)(4)
where ⊗ is the quaternion product operator and I is the
system’s inertia matrix. The torques are given by
τu =
l(T4 − T2)l(T3 − T1)
Q1 −Q2 +Q3 −Q4
(5)
τH =
h∑4
i=1Hy,i
−h∑4i=1Hx,i
l(Hx,4 −Hx,2 +Hy,3 −Hy,1)
τRm =
Rmx,1 −Rmx,2 + Rmx,3 −Rmx,4Rmy,1 −Rmy,2 + Rmy,3 −Rmy,4
0

τΩ =
jrωyΩm−jrωxΩmjrΩm
, Ωm = Ω1 − Ω2 +Ω3 − Ω4
where l is the rotor arm length, h is the center of gravity’s
height, jr is the rotors’ inertia, ωi is the angular speed in the
direction i , Ωi is the i-th rotor speed computed by Eq. (2),
and Ti, Qi, Hj,i and Rmj,i are given by Eqs. (1a) to (1d).
III. BASE CONTROLLER
Consider that the controller must follow a trajectory given
by a reference position, pref (t), and reference rotation angle
around ~zI , ψref (t). [17] shows that all states and inputs
can be written algebraically based on these variables if the
model’s parameters are known, using it to design a trajectory
and a controller. A modified version of this controller is
presented in this section and will be used as the underlying
controller for the learning algorithm.
Although there are complex aerodynamic effects based on
the rotor speed, as shown in Sec. II, most controllers [5],
[6], [7], [10], [17], [18] consider only the thrust T and drag
moment Q from Eqs. (1a) and (1c), respectively, as inputs,
ignoring other aerodynamic effects or rotor dynamics. This
allows the designer to work with the torque τu from Eq. (5)
and a vertical thrust Fz . These efforts that can be transformed
in the propellers’ speed, assuming saturation doesn’t occur,
by solving the linear system
Fzτxτyτz
=
κT,1 κT,2 κT,3 κT,40 −lκT,2 0 lκT,4
−lκT,1 0 lκT,3 0κQ,1 −κQ,2 κQ,3 −κQ,4
︸ ︷︷ ︸
M
Ω21
Ω22
Ω23
Ω24
(6)
where the parameters κT,i and κQ,i can be found through
Eqs. (1a) and (1c) by setting Ti = κT,iΩ2i and Qi = κQ,iΩ
2i ,
and l is the rotor arm length.
Given the state decomposition in Eq. (3) and the trajectory
pref and ψref , an error state
e = [ep, ev, eq, eω]T (7)
can be defined, and the controller must be designed to reduce
these errors. As the position p is already defined by the
trajectory, the position and velocity errors are simply given
by ep = p− pref and ev = v − pref .
Let Kp and Kv be two positive definite matrices. Then a
PD force controller for the position is given by
Fdes = −Kpep −Kvev +mg~zI +mpref (8)
where m is the system’s mass, g is the gravity, pref is a
feedforward acceleration term, and ~zI is the unitary vector
in the z direction for the frame I, shown in Fig. 1.
As the quadrotor can only produce forces in the local
z direction using the thrusts Ti, the desired force Fdes,
assumed not null, must be decomposed in a scalar term
parallel to the body’s z axis, given by
Fz = Fdes · ~zB, (9)
where · is the scalar product, and a desired direction for the
z axis, given by
~zB,des =Fdes
‖Fdes‖. (10)
The angle ψref defines a rotation of the inertial frame Iaround ~zI , creating an intermediary coordinate frame C. The
x axis of this frame can be written as
~xC = [cosψref , sinψref , 0]T .
Using this frame and the desired body z direction given by
Eq. (10), the other axis for the desired frame are defined [17]
by
~yB,des =~zB,des × ~xC
‖~zB,des × ~xC‖, ~xB,des = ~yB,des × ~zB,des
if ~zB,des × ~xC 6= 0.
The three unitary vectors ~xB,des, ~yB,des, and ~zB,des define
a rotation matrix, from which a quaternion qdes can be
extracted using the method described in [19]. Using this
quaternion as a reference for q, the attitude error can be
written as
eq = q−1des ⊗ q. (11)
Let hω be defined by
hω =m
Fz(...pref − (~zB · ...
pref )~zB) , (12)
then the desired values for the angular speeds ωx and ωy are
given by
ωx,des = −hω · ~yB, ωy,des = hω · ~xB.
Finally, the desired value for ωz is given by
ωz,des = ψref~zI · ~zB,
and the angular speed error is defined as
eω = ω − ωdes (13)
Let kq be a positive scalar, Kω a positive definite matrix,
and ~eq the vector component of the error quaternion. Then
it can be shown [20] that the torque τ given by
τ = −kq~eq −Kωeω (14)
globally asymptotically stabilizes the attitude model in
Eq. (4) if τu = τ and only the gyroscopic effect is
considered. Stronger convergence guarantees can be given,
such as exponential stability or feedforward tracking, but
they require more knowledge about the system’s parameters,
like inertia values, which is precisely what this paper avoids.
It’s also important to note that qdes and ωdes aren’t constant,
so there’s no guarantee that the control law for τ will make
the system follow the trajectory with null error.
Using Fz and τ , defined in Eqs. (9) and (14), the rotor
speeds can be found using Eq. (6), assuming that the param-
eters κT and κQ are known.

IV. THE SIGNED DERIVATIVE ALGORITHM
Let a dynamic discrete system be described by
xt+1 = f(xt,ut), (15)
where xt is the state at time t and ut is a control input.
The controller design problem is defined by finding a set of
parameters θ so that the total path cost
J(x; θ) =
H∑
t=0
C(xt,ut), ut = π(xt; θ)
is minimized, where C(·, ·) is a cost function for a single
time step, π(·; ·) is the control policy, and H is the horizon
considered.
A simple algorithm to find the optimal parameter θ∗ is
the gradient descent, where θ is adjusted every H + 1 steps
in the reverse direction of the gradient. If the learn step is
given by α, then the adjustment can be written as
θk+1 = θk − α∂J(x; θk)
∂θk(16)
where the cost gradient is given by
∂J(x; θ)
∂θ=
H∑
t=0
(
(qt + rtKt)
(t−1∑
t′=0
∂xt∂ut′
Φt′
)
+ rtΦt
)
(17a)
qt ≡∂C(xt,ut)
∂xtrt ≡
∂C(xt,ut)
∂ut
Kt ≡∂π(xt; θ)
∂xtΦt ≡
∂π(xt; θ)
∂θ(17b)
Although the gradient depend mostly on known values,
defined through the known functions C(·, ·) and π(·; ·), the
partial derivative ∂xt∂ut′
measures the effect of ut′ on xt, which
depends on the dynamic model given by Eq. (15).
As the system’s model may not be known, Kolter [13],
[21] proposed that the partial derivative may be written as
∂xt∂ut′
= Dt(S+Et,t′) (18)
where Dt is a diagonal positive definite matrix and Et,t′ is an
error. Each line of the matrix S is given by at most one value
different of 0. This value must be +1 or −1, and encodes the
derivative’s sign for that state and input. Assuming that the
inputs are orthogonal, i.e., each state is affected mostly by a
single input, the matrix DtS provides a good approximation
for the derivative, as the lines of S can be scaled properly
to reduce the error matrix Et,t′ .
Kolter also notes in [21] that the lines of S may contain
more than one non-zero value, but their values must be in
the correct proportion, as the algorithm is unable to change
the columns scaling. This means that, if more than one
input affects significantly a state, the relative amount that
they change the state must be known or the error Et,t′ will
increase.
Using the approximate derivative given by Eq. (18), an
approximation to the gradient in Eq. (17a) can be written as
˜∂J(x; θ)
∂θ=
H∑
t=0
(
(qt + rtKt)S
(t−1∑
t′=0
Φt′
)
+ rtΦt
)
,
(19)
which depends only on the user knowledge about the system
embedded in S, and the cost and policy functions, also
defined by the user.
V. CONTROLLER OPTIMIZATION FOR A QUADROTOR
USING SIGNED DERIVATIVE
To use the signed derivative algorithm, the control policy
and cost function must be defined, so that the cost gradient in
Eq. (17a) can be computed. Moreover, the signed derivative
S must be built in a way as close as possible to the intended
format, and the motor saturation must be considered, as it
produces a discontinuity on the gradient.
A. Controller Policy
Although the controller output is given by the desired
rotor speeds, consider for now that it is actually given by
the vertical thrust Fz and torque τ .
It’s clear from Eqs. (8) and (12) that both Fz and τ depend
on the unknown system’s mass m. A standard approach in
adaptive control is to use one estimator for each use of
an unknown parameter [6], but the gradient terms∂π(xt;θ)
∂θ
for the feedforward acceleration pref and for hω would be
different from zero only when the system wasn’t hovering,
degrading their mass estimation. Although the mass term
associated with the gravity in Eq. (8) is always excited, it
isn’t capable of distinguishing changes in mass from vertical
wind changes. Hence a compromise of the uses of m must
be made to provide good estimation.
Consider that the state presented to the controller is the
error in Eq. (7), where the mass estimate is used instead of
the real value, and the vectors ~zI and ~zB are also given as
parameters independent of the state. The desired force Fdesfrom Eq. (8) can be written as
Fdes = θKpep + θKv
ev + θmg~zI +θmgg
pref , (20)
where θv is a controller’s parameter associated with the
original parameter v, and the perpendicular force Fz can be
computed using Eq. (9). The parameter θmg is used instead
of θm due to its higher value, providing more stability during
optimization. As θmg is used both to compensate gravity and
to improve feedforward tracking, the learnt parameter will
establish a compromise between the two while moving, and
focus on keeping altitude while hovering. This parameter is
also used in Eq. (12) instead of the correct mass to compute
hω.
Similarly to Fdes, the torque τ given by Eq. (14) can be
written as
τ = θkqeq + θKωeω + θτ (21)
where θτ is introduced to allow the torque to have a bias
on its value. As parameters for integral terms are hard to

learn, the varying bias serves as a replacement to reduce
static errors.
Once Fz and τ are computed, the rotors’ speeds can be
computed by Eq. (6). However, the transformation matrix
depends on many parameters, and κT and κQ aren’t even
constants. The dependency on l may be ignored by using
the scaled torques τ ′x = τx/l and τ ′y = τy/l in Eq. (21) and
letting the controller learn new parameters θ′.If the nominal thrust and drag coefficients for the propeller
are known, they are used instead of the correct values for
κT and κQ, which vary with the advance and inflow ratios.
If the nominal coefficients aren’t known, an approximation
matrix O(M) is used instead of M in Eq. (6), where
O(M) approximates the thrust and drag coefficients from
M by their orders of magnitude. While the effects of this
approximation are discussed in Sec. VII, it’s important to
note that M−1 corresponds to a right-hand multiplication of
S, thus making the columns scale incorrect and decreasing
performance if it differs from the real matrix.
The simplification of considering the error e as the state
known by the controller, with the directions ~zI and ~zB as
independent known parameters, reduces the complexity of
Φt, making the policy linear in the parameters, by avoiding
the computation of some intricate derivatives, like hω in
relation to θKp. However, it also decouples the linear and
angular systems originally coupled by Kt. This decoupling
doesn’t worsen the performance because, as discussed in the
next section, the value of Kt is ignored.
B. Cost Function
As suggested by Kolter [21], a common cost function is
given by the quadratic
C(x,u) = exTQex + eu
TReu (22)
where ex = x − xref and eu = u − uref are state and
control errors, respectively. These errors are computed using
some full state trajectory as reference, but such trajectory
generation algorithms generally use a known system’s model
to compute the desired states and inputs [17].
This approach isn’t feasible for the problem presented
in this paper, as the parameters are assumed unknown.
However, the state error given by Eq. (7), computed using
only pdes and ψdes as reference, can be used instead of the
error based on a previously determined full trajectory. As
for the control effort, it doesn’t have a reference value and
determining its cost may be hard, so R = 0 may be used
[21].
It’s important to notice that, by setting R = 0, the term
rt in Eq. (17a) is also null, making the gradient independent
of the value of Kt. Thus the simplification presented in the
last section, which decouples the linear and angular systems
from the controller policy’s perspective, affects the learning
only by approximating Φt. The only term that relates the two
subsystems is given by the matrix S.
C. Signed Derivative
As discussed in Sec. IV, the signed derivative S is built
based on the orthogonality between inputs. However, the
quadrotor is a well known under-actuated coupled dynamic
system, so its signed derivative must be designed to express
as much orthogonality as possible.
This design is greatly simplified by the observation that,
during the theoretical development in [21], the signed deriva-
tive S is assumed constant, but this constraint isn’t explored.
Indeed, S is isolated in Eq. (18), yielding
S = D−1t
∂xt∂ut′
−Et,t′ ,
and replaced in Eq. (19) for the analysis. Therefore, the
signed derivative can be generally described by a matrix
St,t′ .
While this general form increases the signed derivative
expressiveness, it also couples the times t and t′, which is
one of the main problems that the algorithm was designed
to solve. Therefore, an intermediary representation is con-
sidered in this paper, which allows the matrix S to vary
but restricts the time knowledge to a single time instant,
considering the state-output relationship to be approximately
constant in the horizon H . The two possibilities explored in
this paper are given by St and St′ , which will be computed
the same way but have slightly different meanings.
The matrix St establishes how previous inputs ut′ affect
the current state xt, assuming that the signed derivative
depends only on the current state. In contrast, the matrix St′
describes how future states xt will be affected by the current
input ut′ , such that the signed derivative in computed with
the state at the time of the input. Although the difference is
subtle and both resulting behaviours should be close if S is
continuous, they may differ significantly when the matrix is
discontinuous, as is the case of this work.
The signed derivative St can be decomposed as
St = [SpT ,Sp
T ,SqT ,Sω
T ]T ,
where Sc is the component for the state’s section c, and the
influence of the inputs over the position and linear velocity
is considered the same. The input order for the columns are
given by Fz , τx, τy and τz .
Assuming that the non-diagonal terms of the inertia matrix
I are small, it’s clear from Eq. (4) that each component of
the angular velocity ω is mainly affected by the respective
component of τ . As ω in the error computation, using
Eq. (13), is positive, the input affects the error eω in a similar
fashion. Therefore the matrix Sω can be defined as
Sω = [03×1, I3],
where 0 is the null matrix and I is the identity.
Consider now that the vector component for error quater-
nion ~eq is small, which makes the scalar component eq close
to ±1. A first order expansion of the quaternion dynamic in
Eq. (4) for the error in Eq. (11), assuming qdes constant, is
given by
eq,t+1 = eq,t +∆t
0eqωxeqωyeqωz
.

Using the relationship between ω and τ previously discussed,
the signed derivative can be written as
Sq =
[01×4
s(eq)Sω
]
,
where the function s(·) gives the sign of its argument.
Although the assumption of ~eq small may be invalid on
some cases, the controller is designed so that it is true most
of the time. Moreover, a generic formulation would have a
full matrix Sq, but the columns scaling is unknown as the
precise relation between ω and τ depends on the system’s
inertia.
For Sp, start with the assumption that the inertial I and
body B frames are aligned. In this case, it’s clear that epz is
mostly affected by Fz , incrementing epx requires τy to be
positive, and a negative value for τx increases epy . Assuming
that the inertias in the x and y directions have close values,
the proportion between τx and τy is next to 1 and the signed
derivative can have more than one non-zero term to mix
the effects of τx and τy without significantly increasing the
approximation error. Therefore, the general matrix Sp can
be written as
Sp =
0 sinψ cosψ 00 − cosψ sinψ 01 0 0 0
, (23)
where ψ is the rotation angle around ~zI between I and an
intermediary frame C′, which is given by the body frame
B with its z direction aligned to I. Note that this matrix
assumes that ~zI · ~zB > 0, as the inputs would have the
reverse effect otherwise. Hence a matrix Sp′ = s(~zI ·~zB)Sp
is used to allow the quadrotor to be facing down.
Note that the signed derivative Sp doesn’t consider the ef-
fect of Fz in the x and y directions, which can be significant
if the system’s attitude isn’t near hovering. Expressing such
knowledge depends on establishing a relationship between
the effects of Fz and τ so that the columns can be correctly
scaled, which isn’t trivial.
As the matrices Sq and Sp depend on certain assumptions
on the states, this can lead to incorrect learning when
violated. A solution for transient behaviours that may not
satisfy the assumptions is to disable learning by making
α = 0 in Eq. (16). However, the results in Sec. VII suggest
that the algorithm may be able to deal with these situations
by itself.
D. Dealing with Saturation
The efforts Fz and τ , computed through Eqs. (9), (20)
and (21), don’t take into consideration the motor saturation.
When solving Eq. (6) for Ω2i , the resulting values may
be unachievable by the rotors. In such cases, a common
practice is to just use the saturated value, though this leads
to a problem in the gradient defined in Eq. (17a), as the
derivatives in Eq. (17b) are ill defined. The solution to this
problem proposed in this paper is to ignore the gradient
gathered in this time window and start recollecting data as
if the horizon had been reached.
While the saturation may be a fluke in the system, it may
also be caused by the parameters θ being too big, which
makes the desired efforts large even for small errors. As this
may occur due to an overconfident previous learning step,
the parameters are adjusted with θk+1 = γθk whenever the
speeds saturate, in addition to resetting the gradient. The
parameter γ ≤ 1 controls how smooth is the parameters’ re-
duction, and must not be too low as the resulting parameters
may not be able to control the quadrotor.
VI. EXPERIMENTS
A. Simulation parameters
The parameters used on the simulations were separated in
three groups, with varying noise levels. The constant ones
are shown in Tab. I, and are comprised of literature values
for the model described in Sec. II and chosen simulation
parameters.
The learning rate α is small so that a larger horizon Hcan be used to better capture the dynamics, and to avoid
overconfident steps. As the learning is more conservative and
the rotor speed is considered to only be bounded from below,
due to the difficulty of finding upper bounds that always
allowed the quadrotor to even lift itself, the parameters shrink
γ wasn’t necessary. However, some experiments with the
nominal quadrotor parameters have shown that 0.99 < γ <0.999 greatly improves the performance during the initial
learning phase.
The cost matrix Q in Eq. (22) is decomposed as
Q = diag(qpI3, qvI3, 0, qqI3, qωI3),
where I3 is the identity matrix of size 3, and the scalar term
of the quaternion is assumed to have no cost, as its value is
adjusted based on the vector component. The input cost R
is considered null for the reasons discussed in Sec. V-B.
For the quadrotor parameters, the nominal values are
shown in Tabs. II and III. Each simulation parameter p′ is
created from the nominal one by applying a uniform noise,
such that p′ = p(1 +wp), wp ∼ U([−β, β]), where p is the
nominal value and β is the noise level.
The parameters in Tab. II have smaller values of β as
they aren’t actually independent [16]. Also, by examining
Eqs. (1e) to (1h), it’s clear that incorrect values may affect
the results significantly. For instance, in Eq. (1e), if θ0 gets
smaller while θtw gets bigger, the thrust coefficient may
become negative, which means that a positive rotor speed
produces thrust in the reverse direction. This effect was
perceived for lager values of β, which lead to the reduced
noise level. It’s also important to highlight that the noisy
values may not correspond to any real propeller, as these
usually have their parameters optimized, and may not be
a good fit for the quadrotor’s parameters, which influence
which propeller is chosen, hence the performance may be
worsened.
The matrix M in Eq. (6) depend on the nominal simulation
values κ′T and κ′Q, as discussed in Sec. V-A. As those values
may not be available, the notion of approximating M by
a matrix with the order of magnitude of its terms O(M)

TABLE I: Constant experiment parameters.
Parameter Description Value
a Lift slope 5.7ρ Air density 1.293
Number of blades 2g Gravity 9.81
Number of runs 100Simulated time in seconds 120
Sampling frequency in hertz 1000α Learning rate 10−4
H Learning horizon 9γ Parameter shrink on saturation 1Ω Maximum rotor speed ∞
Ω Minimum rotor speed 0qp Position cost 1qv Linear velocity cost 1qq Quaternion cost 10qω Angular velocity cost 1
TABLE II: Propeller parameters with β = 0.1.
Parameter Description Value
θ0 Pitch of incidence 0.2618θtw Twist picth 0.045Cd Drag coefficient 0.052c Chord 0.0394R Radius 0.15
TABLE III: Experiment parameters with β = 0.25.
Parameter Description Value
km Rotor gain 0.936τm Rotor time constant 0.178I Quadrotor’s inertia diag([7.5, 7.5, 1.3])× 10−3
κT Nominal thrust coefficient 3.13× 10−5
κQ Nominal drag coefficient 7.5× 10−7
l Arm length 0.232m Mass 0.53jr Rotor inertia 6× 10−5
h Center of gravity’s height 0.058Ac Center hub area 0.005C Center drag coefficient 1.32
was introduced. Experiments have shown that starting with
a controller overconfident of how much thrust and drag the
propellers produce provides better results than otherwise, as
the lower rotor speeds are applied. Therefore, the parameters
κ′i are approximated by O(κi) = 10⌈log10 κi⌉, where ⌈·⌉ is
the round up operator, and the original nominal value is used
instead of the nominal noised one, which is assumed to be
unknown.
Besides the noisy parameters, a small wind was also
applied during simulation, as the nominal parameters are
from an indoor quadrotor [15]. The wind wt at time step
t is composed of two different sources such that wt =wt,1 + wt,2. The first one describes fast change in wind,
due to rotor motion and to simulate natural vibration, and is
described by wt,1 ∼ N (03×1, 0.5I3), where N (µ, σ) is the
normal distribution, while the second one is a dynamic wind
flow characterized by wt,2 =√1− τ2wt−1,2 + τvt,vt ∼
N (03×1, 0.1I3), where the time constant is τ = 10−3 and
the starting condition is w0,2 ∼ N (03×1, 0.1I3).
The controller parameters in Eqs. (20) and (21) are as-
sumed to be diagonal, and their initial values are given by
θKp= −2I3, θKv
= −5I3, θKq= −10, θKω
= −I3, and
θmg = 0, where I3 is the identity matrix of size 3 and θmgstarts null as no mass estimate is used.
B. Learning methodology
As the initial value for θmg is null, the quadrotor isn’t
even able to hover. The first step in the learning process is
to find some good initial estimate so that the vehicle can be
near hover. This is achieved by starting at an initial position
on the ground, such that pz ≥ 0, setting θmg = 10t, where tis the current time, and only using it to compute the control
output. Once pz > 0, the vehicle has taken flight and the
current value of θmg is used as initial estimate for the next
phase. It must be highlighted that, in general, this estimate
is higher than the value needed for hovering due to rotor
dynamics, as described by Eq. (2).
Once the initial θmg has been estimated, the quadrotor
is left on the air with its motors shutdown at the desired
position and orientation, so that it can adjust its parameters
to have good hovering values.
The final step is composed of circular trajectories which
are given by
pref (t) = [rT cos(ωT t), rT sin(ωT t), 0]T , ψref (t) = ωT t.
(24)
To avoid large control values due to non-zero initial error
and to test the performance on inconsistent trajectories, the
values derived from the trajectory used by the controller are
given by
v′ref =
vrefttw, if t ≤ tw
vref , otherwise
where tw is the time window to reach the original trajectory,
such that larger values provide a smoother transition but the
trajectory is inconsistent for longer time periods, and v is
any trajectory derived value used by the controller, such as...p.
VII. RESULTS
There are two different sets of results in this paper. The
first one assumes that the nominal noisy propeller parameters
κ′T and κ′Q are known, so that the matrix M in Eq. (6)
is closer to the real one. The second set assumes that
these parameters aren’t available, and are replaced by their
approximations O(κi).The legend t corresponds to learning using St, while
t′ corresponds to using St′ , where the difference between
the two is discussed in Sec. V-C. The heading angle ψ is
computed from the attitude q considering only a rotation
around z, while the heading error is given by eψ = ψ−ψref .
A. Known propeller parameters
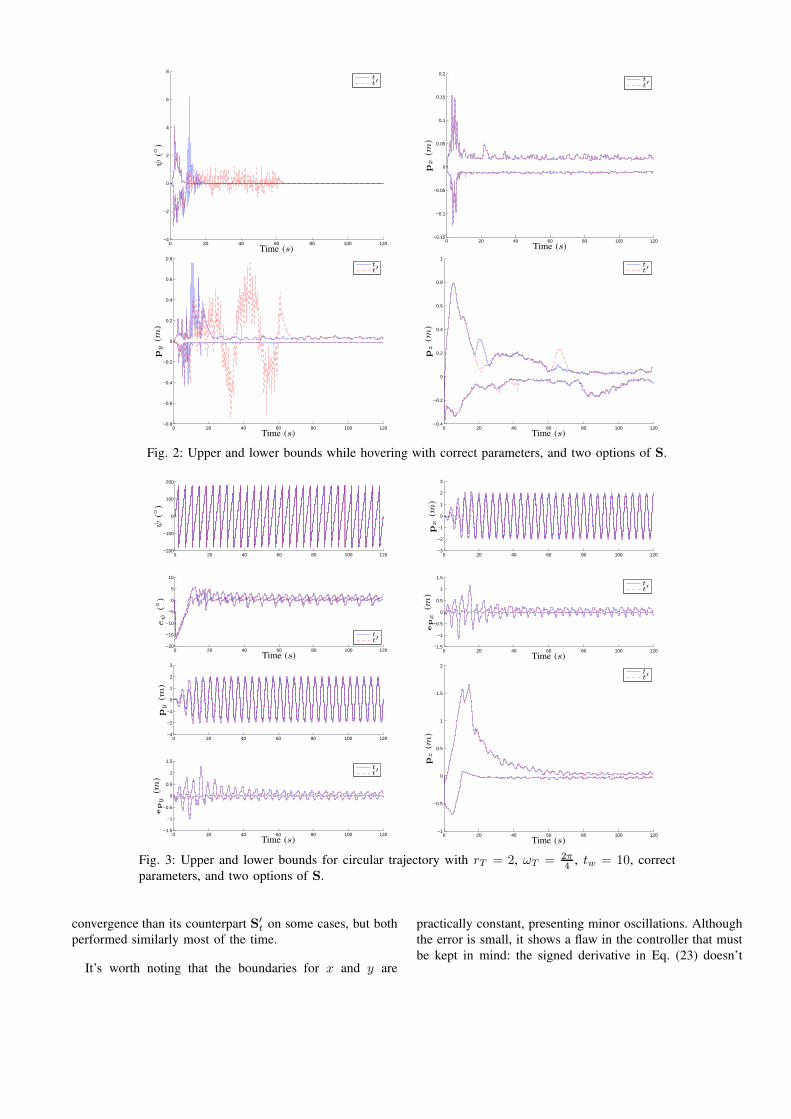
Figure 2 shows the quadrotor performance during hover.
It’s clear that in the first few seconds the controller is
getting used to the dynamics, adjusting the parameters ag-
gressively. Nonetheless, the position stayed within reasonable
boundaries, suggesting that this first learning can happen
in any available space. The signed derivative St had faster
0 20 40 60 80 100 120−4
−2
0
2
4
6
8
tt′
ψ(
)
Time (s)0 20 40 60 80 100 120
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
tt′
px
(m)
Time (s)
0 20 40 60 80 100 120−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
tt′
py
(m)
Time (s)0 20 40 60 80 100 120
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
tt′
pz
(m)
Time (s)
Fig. 2: Upper and lower bounds while hovering with correct parameters, and two options of S.
0 20 40 60 80 100 120−200
−100
0
100
200
0 20 40 60 80 100 120−20
−15
−10
−5
0
5
10
tt′
ψ(
)eψ
()
Time (s)
0 20 40 60 80 100 120−3
−2
−1
0
1
2
3
0 20 40 60 80 100 120−1.5
−1
−0.5
0
0.5
1
1.5
tt′
px
(m)
epx
(m)
Time (s)
0 20 40 60 80 100 120−3
−2
−1
0
1
2
3
0 20 40 60 80 100 120−1.5
−1
−0.5
0
0.5
1
1.5
tt′
py
(m)
epy
(m)
Time (s)0 20 40 60 80 100 120
−1
−0.5
0
0.5
1
1.5
2
tt′
pz
(m)
Time (s)
Fig. 3: Upper and lower bounds for circular trajectory with rT = 2, ωT = 2π4 , tw = 10, correct
parameters, and two options of S.
convergence than its counterpart S′t on some cases, but both
performed similarly most of the time.
It’s worth noting that the boundaries for x and y are
practically constant, presenting minor oscillations. Although
the error is small, it shows a flaw in the controller that must
be kept in mind: the signed derivative in Eq. (23) doesn’t
0 20 40 60 80 100 120−200
−100
0
100
200
0 20 40 60 80 100 120−10
−8
−6
−4
−2
0
2
4
tt′
ψ(
)eψ
()
Time (s)
0 20 40 60 80 100 120−4
−2
0
2
4
6
0 20 40 60 80 100 120−2
−1.5
−1
−0.5
0
0.5
1
1.5
tt′
px
(m)
epx
(m)
Time (s)
0 20 40 60 80 100 120−6
−4
−2
0
2
4
0 20 40 60 80 100 120−2
−1.5
−1
−0.5
0
0.5
1
1.5
tt′
py
(m)
epy
(m)
Time (s)0 20 40 60 80 100 120
−1
−0.5
0
0.5
1
1.5
2
2.5
tt′
pz
(m)
Time (s)
Fig. 4: Upper and lower bounds for circular trajectory with rT = 4, ωT = 2π8 , tw = 20, correct
parameters, and two options of S.
0 20 40 60 80 100 120−5
−4
−3
−2
−1
0
1
2
3
4
5
tt′
ψ(
)
Time (s)0 20 40 60 80 100 120
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
tt′
px
(m)
Time (s)
0 20 40 60 80 100 120−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
tt′
py
(m)
Time (s)0 20 40 60 80 100 120
−1
−0.5
0
0.5
1
1.5
tt′
pz
(m)
Time (s)
Fig. 5: Upper and lower bounds while hovering with approximate parameters and two options of
S.
express any relation between Fz and the position on x and
y due to limitations discussed in Sec. V-C. Therefore, the
controller seem to be able to compensate for lateral wind
only by applying some torque to prevent the quadrotor from

0 20 40 60 80 100 120−200
−100
0
100
200
0 20 40 60 80 100 120−30
−20
−10
0
10
20
tt′
ψ(
)eψ
()
Time (s)
0 20 40 60 80 100 120−4
−2
0
2
4
0 20 40 60 80 100 120−4
−3
−2
−1
0
1
2
tt′
px
(m)
epx
(m)
Time (s)
0 20 40 60 80 100 120−6
−4
−2
0
2
4
0 20 40 60 80 100 120−3
−2
−1
0
1
2
3
tt′
py
(m)
epy
(m)
Time (s)0 20 40 60 80 100 120
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
tt′
pz
(m)
Time (s)
Fig. 6: Upper and lower bounds for circular trajectory with rT = 2, ωT = 2π5 , tw = 10, approximate
parameters, and two options of S.
0 20 40 60 80 100 120−200
−100
0
100
200
0 20 40 60 80 100 120−8
−6
−4
−2
0
2
4
6
tt′
ψ(
)eψ
()
Time (s)
0 20 40 60 80 100 120−5
0
5
0 20 40 60 80 100 120−4
−2
0
2
4
tt′
px
(m)
epx
(m)
Time (s)
0 20 40 60 80 100 120−5
0
5
0 20 40 60 80 100 120−2
−1
0
1
2
3
4
5
tt′
py
(m)
epy
(m)
Time (s)0 20 40 60 80 100 120
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
tt′
pz
(m)
Time (s)
Fig. 7: Upper and lower bounds for circular trajectory with rT = 4, ωT = 2π10 , tw = 20, approximate
parameters, and two options of S.
drifting. However, as the errors in pz are significantly higher,
due to its higher sensitivity to wind, and every position’s
component has the same weight, the controller focus most
of its effort on the altitude.

Figures 3 and 4 show the controller following two different
circular trajectories described by Eq. (24) after learning the
hovering parameters. Even though the underlying controller
is simple, being composed basically of PD controllers with
no angular feedforward, the signed derivative doesn’t have
correct columns scaling, and the propeller parameters may
not be adequate, the learnt parameters allow the vehicle to
follow the trajectory reasonably well.
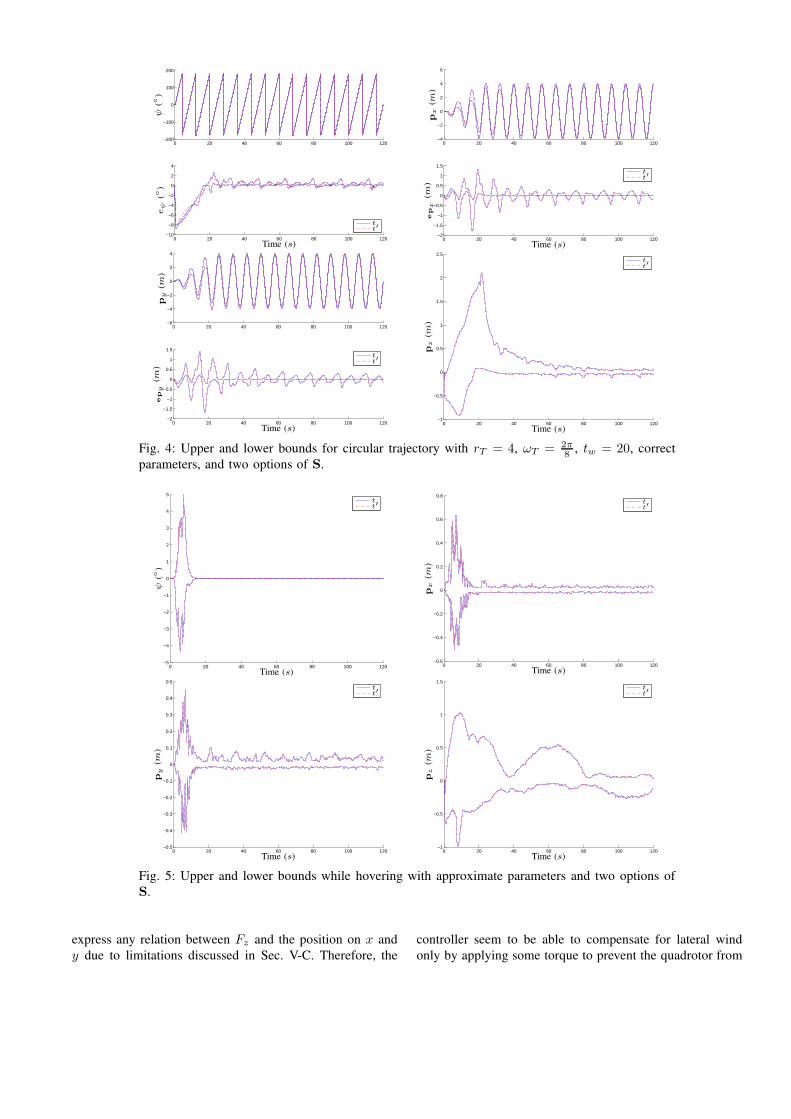
B. Approximate propeller parameters
Figure 5 shows the controller learning to hover a quadrotor
without any parameter knowledge. Although the errors dur-
ing the first few seconds are higher than the previous case,
the performance after the parameters have nearly converged
is similar to the one presented in Fig. 2. This occurs because,
during hover, the main control effort used is the force
Fz , with the torques near zero, so that the rotors’ speed
coupling isn’t strong. In this situation, O(M) is clearly a
good approximation.
However, the approximation degrades the performance
during highly coupled trajectories, such as the circular ones
in Figs. 6 and 7. In these, the controller isn’t much capable
of dealing with the trajectory inconsistencies during the
initial window, leading to large transient errors. The rotation
speed was lowered from the previous case as the transient
inconsistency on the original speed destabilized the system.
Even though the steady lateral errors also increase, the
vehicle follows the trajectory close enough for some appli-
cations, and is kept stable even with the gradient direction
considerably distorted. Although not presented here, using
unmodified propeller parameters, i.e., setting β = 0 for the
values in Tab. II, the errors are reduced in half, indicating
that the values assigned may not be used in real systems and
the real error may be considerably smaller with appropriate
components choice.
From the position px in Fig. 7 at t = 40, 50, 60, . . .,it’s obvious that the errors aren’t consistent each turn. This
is a result of the incorrect gradient, as the controller tries
to minimize the total error and may end up increasing it.
However, the trajectory is aggressive enough that a static
controller, with the parameters learnt during hover, isn’t able
to stabilize the system. As the learning algorithm searches for
the locally optimal solution, it’s able to change its parameter
settings based on the local error, thus forming a dynamic
system on itself.
VIII. CONCLUSION
This paper presented a simple PD-based controller to stabi-
lize a quadrotor without parameters knowledge using signed
derivative policy iteration. Two approaches were analysed,
where they differed on whether the controller knows only the
nominal propeller parameters or an approximation is used.
Even though the gradient is distorted due to the signed
derivative having incorrect columns scaling, which is a
limitation of the technique, the controller ignores rotor
dynamics and most aerodynamic effects, and doesn’t use
angular feedforward, the vehicle achieved stable hovering
and was able to follow a circular trajectory. However, if
the propeller parameters are unknown, the error on fast
trajectories may be too large for some applications. To the
best of the authors’ knowledge, this is the first quadrotor
controller proposal that requires no parameter knowledge or
hand tunning whatsoever.
If the nominal propeller parameters are known, the per-
formance may be further improved if the position signed
derivative is aware of how the thrust affects the x and ypositions, while keeping the torque knowledge. For the case
where no parameters are known, knowing the ratio between
the propeller parameters may also boost performance. As
the signed derivative isn’t able to learn these parameters,
an approach currently being studied is the use of another
learning algorithm to learn these scalings online.
Simulations have shown that the quadrotor’s transient
behaviour may distance significantly from the desired tra-
jectory. As safety is a major concern for these systems [22],
one may be able to apply reachability sets [23] to disable
learning and switch to a safe controller if necessary. Also,
if the task performed is repetitive, other approaches such as
iterative learning control [24] and trajectory corrections [25],
[26] can also be integrated to compensate for errors caused
by policy iteration limitations, although the effects of this
simultaneous learning are still being analysed.
REFERENCES
[1] S. Lupashin, A. Schollig, M. Hehn, and R. D’Andrea, “The flyingmachine arena as of 2010,” in Proceedings of the IEEE International
Conference on Robotics and Automation. IEEE, 2011, pp. 2970–2971.
[2] G. M. Hoffmann, D. G. Rajnarayan, S. L. Waslander, D. Dostal, J. S.Jang, and C. J. Tomlin, “The Stanford testbed of autonomous rotorcraftfor multi agent control (STARMAC),” in Digital Avionics Systems
Conference. IEEE, 2004.
[3] S. Bouabdallah, P. Murrieri, and R. Siegwart, “Design and control ofan indoor micro quadrotor,” in Proceedings of the IEEE International
Conference on Robotics and Automation. IEEE, 2004, pp. 4393–4398,vol. 5.
[4] A. Benallegue, A. Mokhtari, and L. Fridman, “High-order sliding-mode observer for a quadrotor UAV,” International Journal of Robust
and Nonlinear Control, vol. 18, no. 4-5, pp. 427–440, 2008.
[5] T. Madani and A. Benallegue, “Backstepping control for a quadrotorhelicopter,” in Proceedings of the IEEE International Conference on
Intelligent Robots and Systems. IEEE, Oct. 2006, pp. 3255–3260.
[6] M. Huang, B. Xian, C. Diao, K. Yang, and Y. Feng, “Adaptivetracking control of underactuated quadrotor unmanned aerial vehiclesvia backstepping,” in American Control Conference. IEEE, 2010, pp.2076–2081.
[7] S. Bouabdallah and R. Siegwart, “Full control of a quadrotor,” inProceedings of the IEEE International Conference on IntelligentRobots and Systems, no. 1. IEEE, Oct. 2007, pp. 153–158.
[8] L. Besnard, Y. B. Shtessel, and B. Landrum, “Quadrotor vehiclecontrol via sliding mode controller driven by sliding mode disturbanceobserver,” Journal of the Franklin Institute, vol. 349, no. 2, pp. 658–684, Mar. 2012.
[9] S. Bouabdallah, A. Noth, and R. Siegwart, “PID vs LQ controltechniques applied to an indoor micro quadrotor,” in Proceedings of
the IEEE International Conference on Intelligent Robots and Systems,vol. 3. IEEE, 2004, pp. 2451–2456, vol. 3.
[10] P. E. I. Pounds, R. Mahony, and P. Corke, “Modelling and control ofa large quadrotor robot,” Control Engineering Practice, vol. 18, no. 7,pp. 691–699, July 2010.
[11] G. M. Hoffmann, H. Huang, S. L. Waslander, and C. J. Tomlin,“Quadrotor helicopter flight dynamics and control: Theory and experi-ment,” in Proceedings of the AIAA Guidance, Navigation, and Control
Conference, no. August. AIAA, 2007, pp. 1–20.

[12] A. Y. Ng, H. J. Kim, M. I. Jordan, and S. Sastry, “Autonomoushelicopter flight via Reinforcement Learning,” in Advances in NeuralInformation Processing Systems 16, vol. Volume 21. MIT Press,2004.
[13] J. Kolter and A. Ng, “Policy search via the signed derivative,” inRobotics: science and systems. MIT Press, 2009.
[14] P. E. I. Pounds, R. Mahony, J. Gresham, P. Corke, and J. Roberts,“Towards dynamically-favourable quad-rotor aerial robots,” in Pro-
ceedings of the 2004 Australasian Conference on Robotics and Au-tomation. ARAA, 2004.
[15] S. Bouabdallah, “Design and control of quadrotors with application toautonomous flying,” Ph.D. dissertation, 2007.
[16] G. Fay, “Derivation of the aerodynamic forces for the mesicoptersimulation,” Stanford University, Tech. Rep., 2001.
[17] D. Mellinger and V. Kumar, “Minimum snap trajectory generationand control for quadrotors,” in Proceedings of the IEEE InternationalConference on Robotics and Automation. IEEE, 2011, pp. 2520–2525.
[18] N. Guenard, T. Hamel, and V. Moreau, “Dynamic modeling andintuitive control strategy for an X4-flyer,” in Proceedings of the IEEE
International Conference on Control and Automation. IEEE, 2005,pp. 141–146, vol. 1.
[19] I. Y. Bar-Itzhack, “New method for extracting the quaternion from arotation matrix,” Journal of Guidance, Control, and Dynamics, vol. 23,no. 6, pp. 1085–1087, 2000.
[20] A. Tayebi and S. McGilvray, “Attitude stabilization of a four-rotoraerial robot,” in Conference on Decision and Control. IEEE, 2004,pp. 1216–1221, vol. 2.
[21] J. Z. Kolter, “Learning and control with inaccurate models,” Ph.D.dissertation, 2010.
[22] M. W. Mueller and R. D’Andrea, “Critical subsystem failure mitigationin an indoor UAV testbed,” in Proceedings of the IEEE InternationalConference on Intelligent Robots and Systems. IEEE, Oct. 2012, pp.780–785.
[23] J. H. Gillula and C. J. Tomlin, “Reducing Conservativeness in SafetyGuarantees by Learning Disturbances Online: Iterated Guaranteed SafeOnline Learning.” in Robotics: Science and Systems. IEEE, 2012.
[24] O. Purwin and R. D’Andrea, “Performing aggressive maneuvers usingiterative learning control,” in Proceedings of the IEEE InternationalConference on Robotics and Automation. IEEE, May 2009, pp. 1731–1736.
[25] S. Lupashin, A. Schollig, M. Sherback, and R. D’Andrea, “A simplelearning strategy for high-speed quadrocopter multi-flips,” in Pro-
ceedings of the IEEE International Conference on Robotics and
Automation. IEEE, 2010, pp. 1642–1648.[26] S. Lupashin and R. D’Andrea, “Adaptive open-loop aerobatic maneu-
vers for quadrocopters,” in IFAC World Congress, no. 2010. IFAC,2011, pp. 2600–2606.
Top Related