






Languages
Pages
Legal


UNIVERSITATEA DIN PITESTIFACULTATEA DE MECANICA SI TEHNOLOGIETEHNOLOGIA CONSTRUCTIILOR DE MASINI
PROIECT LA DISPOZITIVE TEHNOLOGICE
Îndrumător, Student,S.l. Dr.Ing Iordache Daniela Monica Marinescu Adrian - Mihai
Anul IV
2008 – 2009
1

Cuprins1.
Operaţia pentru care se proiectează dispozitivul (frezare canal pana)…….4
1.1Schiţa operaţiei………………………………………………………………....4
1.2Datele iniţiale necesare proiectării dispozitivului: maşina-unealtă; scule; regim de lucru; forte de aşchiere…………………………………………………………5
1.2.1. Proprietatile mecanice ale materialului piesei de prelucrat…………………5
1.2.2. Stadiul de prelucrare a piesei pana la operatia pentru care se proiecteaza dispozitivul…………………………………………………………………………5
1.2.3. Elementele operatiei pentru care se proiecteaza dispozitivul………………..6
2.Stabilirea variantei optime de orientare a piesei in dispozitiv……….….…..9
2.1. Stabilirea cotelor de realizat pe piesa si a bazelor de cotare……………….....9
2.2 Stabilirea variantelor de orientare (se foloseşte schiţa operaţiei si un tabel centralizator)………………………………………………………………………9
2.3 Stabilire variantelor care satisfac cerinţele tehnice pe baza calculului erorilor de orientare……………………………………………………………..………..10
2.3.1.Eroarea maxima admisa…………………………………….………………10
2.3.2. Erorile de orientare a semifabricatului in dispozitiv……………………….10
2.4 Stabilirea sistemului bazelor de orientare a piesei la prelucrat si a elementelor de orientare…………………………………………………………………….....13
2.5Stabilirea variantei optime de orientare……………………………………….13
2

3. Stabilirea fixării piesei pentru varianta optimă de orientare. Calculul forţelor de strângere…………………………………………………………….14
4. Proiectarea ansamblului dipozitivului…………………………………….15
4.1 Proiectarea reazemelor……………………………………………………….15
4.2 Proiectarea sistemului de fixare a piesei……………………………………..19
4.3 Proiectarea celorlalte elemente din structura dispozitivului : corp ; elemente de legătură cu maşina-unealtă ;elemente de ghidare a sculei………………………..21
4.4 Alegerea materialului pentru elementele dispozitivului…………………….26
4.5 Analiza ergonomicitaţii dispozitivului proiectat……………………………..27
4.6 Măsuri de protecţie la utilizarea dispozitivului……………………………….30
Bibliografie……………………………………………………………………….31
3

1. Operatia pentru care se proiecteaza dispozitivul de fabricatie este operatia de frezare a canalului dreptunghiular de latime 8mm si adancime 3 mm si o lungime de 36 mm, plecand de la desenul de executie al piesei :
1.1. Schita operatiei:
4

1.2. Date initiale necesare proiectarii dispozitivului:
1.2.1. Proprietatile mecanice ale materialului piesei de prelucrat
Materialul din care este executată piesa este: 21MoMnCr12:[ISD 1]
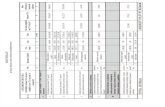
Conform STAS 791 – 88 materialul prezintă urmatoarele caracteristici:
Tipul otelului
Marca otelului
C Mn Cr Mo Ni S P Alte elemente
Cr-Mo 21MoMnCr12
0.18-0.24
0.8-1.2
1.0-1.40
0.20-0.30
- 0.02 –0.04
0.035 -
Marca de otel Diam.probei de referinţămm
Tratamentul termic
Limita de curgere Rpo2N/mm2
Rezistenţa la rupereRm, N/mm2
Alungirea As% min
Energia de rupereJ min
Duritatea Brinell in stare recoapta HB max
21MoMnCr 12 16 CR 880 1080 8 6 R+217
1.2.2. Stadiul de prelucrare a piesei pana la operatia pentru care se proiecteaza dispozitivul
5

1.2.3. Elementele operatiei pentru care se proiecteaza dispozitivul
Elementele operatiei care trebuie cunoscute pentru proiectarea dispozitivului sunt: fazele operatiei, masina unealta utilizata, sculele utilizate, regimul de aschiere, fortele de aschiere.
A. Fazele operatiei sunt:- frezare canalOperatia se realizeaza intr-o singura faza.B. Masina-unealta: :[VLA 1 pag222]Prelucrarea se face pe o masina de frezat universal FU 350X1850 cu urmatoarele caracteristici:
Caracteristici FU32
Dimensiunile mesei, mm 320X1250
Cursele maşinii pe direcţie longitudinala, trasversală şi repectiv verticală
700X250X370
Gama de turaţii ale axului principal rot/min30; 37,5; 47.5; 60; 75;95; 118; 150; 190; 235; 300; 375; 475; 600; 750; 950; 1100; 1500.
Gama de avansuri, mm/min19; 23,5; 47.5; 60; 75; 95; 118; 150; 190; 235; 300; 375; 475; 600; 750; 950.
Puterea motorului principal, kw 7,5
Distanţa minimă si maximă dintre suprafaţa 210-4606

batiului şi mijlocul mesei
Lăţimea canalelor T 18
Numărul de canale T şi distanţa dintre ele 3 canale la 70mm
C. Scula utilizata :Placutele utilizate au fost alese cu ajutorul softului SANDVIK Coromant, caracteristicile ei fiind prezentate mai jos:
D. Regimul de aschiere:
7

Regimul de aschiere pentru fiecare faza a operatiei se alege din normative sau se calculeaza. Parametrii regimului de aschiere care trebuie stabiliti sunt: adancimea de aschiere, avansul si viteza de aschiere.Adancimea de aschiere : t = 3 mm.
Avansul de aschiere:
s = × z = 0,015 × 4 = 0,060 mm/rot
= avansul pe dinte: = 0,010…0,020 mm/dinte [1, tab. 4.56]
z = numarul de dinti: z = 4
Viteza de aschiere:
[1, tab. 4.68]
– constanta ce depinde de cuplul semifabricat – scula [1, tab. 4.68]
- exponenti prezentati in [1] tab. 4.68 in functie de conditiile concrete de
prelucrare
- coeficient de corectie in functie de prelucrabilitatea materialului
[1, tab. 4.69]
- coeficient de corectie in functie de starea materialului de prelucrat
[1, tab. 4.71]
- suprafata de contact
Viteza de aschiere:
Se calculeaza turatia sculei si viteza de aschiere reala :
Din gama de turatii a masinii unelte se alege turatia reala:
8
min/32.591000
376814.3
1000
min66.304
5014.3
.38.26610001000
mnD
v
rotD
vn
rr

=376 rot/min
E. Calculul fortelor :
Forta tangentiala:
= 65 x 30.1 x 0.015 0.75 x 80,86 x4 x 8 -0.86 x 1 = 12.438 daN [1, tab. 4.68]Forta radiala:Fr = 0.6 x Ft = 0. 6 x 12.438 = 7.46 daN Forta axiala: Fax = 0.4 x Ft = 0.4 x 12.438=4.97 daNPuterea:
[KW] > PMU = 2 [KW]
2. Stabilirea variantei optime de orientare in dispozitiv:
2.1. Stabilirea cotelor de realizat pe piesa si a bazelor de cotare: [CHI 1]
Cote care trebuiesc realizate la prelucrare
Cote trecute pe desen sau rezulta prin pozitia particulara a piesei
Bazele de cotare
Suprafetele care le determina
Abaterile maxime admise la cote
Abaterile sunt trecute pe desen sau sunt alese conform SR EN 22768:1-1995
36 Pe desenGeneratoarea suprafetei Φ50
Suprafata Φ 50±0.3 Pe desen
9

3Pe desen
Planul determinat de suprafata B (Φ54)
Suprafata cilindrica exterioara B ±0.2 Pe desen
Pe desenAxa suprafetei cilindrica exterioare P
Suprafata P0.6 EN 22768:1-
1995
60⁰ Rezultă prin poziţia particulară a sculei
Axa supraf cil int Φ6.6 si axa suprafetei cil int P
Suprafata P si gaura Φ6.6 ±0.5⁰
SR EN 22768-1:1995
2.2. Stablirea variantelor de orientare
Varinata I 1 6 7Varinata II 2 6 7Varinata II 3 4 6 7Varinata IV 1 6 5Varinata V 2 6 5Varinata VI 3 4 6 5
2.3. Stablirea variantelor care satisfac cerintele tehnice pe baza calculului erorilor de orientare:
2.3.1.Eroarea maxima admisa:
- toleranta piesei la cota d, de realizat la prelucrare, in mm
– toleranta la cota functionala a dispozitivului, corespunzatoare cotei d a piesei, in
mm
– precizia medie economica la cota d [UNG 1, tab. 2.11]
10

= 0.6 - (0.15 + 0.035) = 0.415
2.3.2. Erorile de orientare a semifabricatului in dispozitiv [CRS I]
Erorile pentru varianta I ([1], [6],[7]):
ε(3) = 0 ε( ) = 0 ε(36) = 0
ε(60⁰) ≠ 0 =arctg = arctg = 0.04⁰
j1 = Dmax p – dmin b
db= Dmin p[g6]=
As= -0.009 ; Ai =-0.014 J1=(6.6+0.045) – (6.6 – 0.014)= 0.059 mm
Erorile pentru varianta II ([2], [6],[7]):
ε(3) = 0 ε(36) = 0 ε( ) = j2
j2 = Dmax p – dmin b
db= Dmin p[g6]=
As= -0.009 ; Ai =-0.020 J2=(29.8 + 0.033) – (29.8-0.020)= 0.053 mm
ε(60⁰) ≠ 0 =arctg = arctg = 0.089⁰
Erorile pentru varianta III ([3], [4],[6], [7]):
ε(3) ≠0 ε( ) = 0 ε(36) =0
ε(60⁰) ≠ 0 =arctg = arctg = 0.04⁰
j1 = Dmax p – dmin b
db= Dmin p[g6]=
As= -0.009 ; Ai =-0.014
11

J1=(6.6+0.045) – (6.6 – 0.014)= 0.059 mm
Erorile pentru varianta IV ([1], [6],[5]):
ε(3) =0 ε( ) = 0 ε(36) = Tl=0.2
ε(60⁰) ≠ 0 =arctg = arctg = 0.04⁰
j1 = Dmax p – dmin b
db= Dmin p[g6]=
As= -0.009 ; Ai =-0.014 J1=(6.6+0.045) – (6.6 – 0.014)= 0.059 mm
Erorile pentru varianta V ([2], [6],[5 ]):
ε(3) =0 ε(36) = Tl=0.2 ε( ) = j2
j2 = Dmax p – dmin b
db= Dmin p[g6]=
As= -0.009 ; Ai =-0.020 J2=(29.8 + 0.033) – (29.8-0.020)= 0.053 mm
ε(60⁰) ≠ 0 =arctg = arctg = 0.089⁰
Erorile pentru varianta VI ([3], [4],[6], [5]):
ε(36) == Tl=0.2 ε(3) ≠0
ε( ) ≠0 = 0.04
ε(60⁰) ≠ 0 =arctg = arctg = 0.04⁰
j1 = Dmax p – dmin b
db= Dmin p[g6]=
As= -0.009 ; Ai =-0.014 J1=(6.6+0.045) – (6.6 – 0.014)= 0.059 mm
12

Varianta de orientare
Erori de orientare la cotele de realizat
Erori admisibile la cotele de realizat
DA/NU
3 36 60⁰ 3 36 60⁰
I 0 0 0 0.04
0.265 0.415 0.415 0.42
DA
II 0 0 0.053 0.089 DA
III 0.233 0 0 0.04 DA
IV 0 0.2 0.053 0.04 DA
V 0 0.2 0.053 0.089 DA
VI 0.233 0.2 0.04 0.04 DA
2.4. Stabilirea sistemului baza de orientare a piesei la prelucrare si a elementelor de orientare:
Bazele de orientare Elementele de orientare utilizate Simbolul elementului de orientare
Suprafata cilindrica exterioara P
Prisma scurta
Prisma scurta
Suprafata frontala B Reazem pentru suprafete planeSuprafata cilindrica interioara P
Dorn rigid sau bucsa rigida
Mecanisme autocentrante de tipul mandrinelor si dornurilor
Suprafata frontala C Dorn rigid sau bucsa rigida
2.5. Stablirea variantei optime de orientare: [UNG 2]
13

Toate variantele de orientare pot fi acceptate pentru că erorile acestora de orientare nu depășesc erorile admisibile.Vom alege varianta a-III-a de orientare folosind doua prisme scurte 3, 4 , un bolt frezat 6 și reazemul pentru suprafață plană 7,pentru a simplifica construcția dispozitivului.
3. Stabilirea fixarii piesei pentru variant optima de orientare. Calculul fortelor de strangere:
Calculul marimii fortei de fixare:
(←) – deplaseaza piesa pe prisma
- μ - μ = 0
μ = 0.1K = 4
– roteste piesa pe prisma
- 2μ - 2μ = 0
14

c=47
(→) – tinde sa rastoarne piesa fata de punctul A
Frx c – S x d = 0d=45
Fax rastoarna piesa fata de punctual A :Fax x a – S x b =0a=0 b=45
Se adopta S = max[ , , , SIV] = = 654 daN
15

`
4.Proiectarea ansamblului dispozitivului.
4.1Proiecarea reazemelor:
Elementele de orientare sunt elemente ale dispozitivului care vin in contact cu suprafetele piesei de prelucrat. Tipul elementelor de orientare se stabileste la alegerea variantei optime incat la proiectare trebuie sa se stabileasca constructia si dimensiunile acestora.Cel mai simplu dispozitiv rezulta folosind boltul cilindric [2] si reazemul pentru suprafata plana [5] si boltul frezat[6]. Astfel varianata optima de orientare este varianata V.
Boltul frezat.
Boltul frezat este executat in treapta de precizie g7.Desenul acestuia este prezentat impreuna cu calculul diametrului mai jos:
Dminboltfrezat=10-0.045=9.955mmAcesta este executat in treapta 6 sau 7 de precizie, in campul de tolerant g, de unde rezulta abaterile acestuia Dboltfrezat=
d=6.55b=2B=5.5
16

Materialul boltului frezat este OSC 8 calit la 55-60 HRC
Cep de sprijin.
Pentru sprijinirea pe suprafeţele semifabricatelor pe baze brute (turnate, forjate), sau pentru sprijinirea pe suprafeţe prelucrate a unor semifabricate de dimensiuni relativ mici, se folosesc cepi de reazem. Feţele de lucru ale cepurilor se construiesc în funcţie de rugozitatea bazelor. Astfel, pentru suprafeţele netede (prelucrate), se executa cepuri cu faţă de lucru plana, iar pentru suprafeţele neprelucrate – cepuri cu faţă de lucru sferică sau zimţată. Având în vedere dificultăţile ce se ivesc la îndepărtarea aşchiilor mărunte care se depun între zimţi, se recomanda plasarea cepurilor cu feţele zimţate numai pe pereţii laterali şi superiori ai corpului dispozitivului. Sprijinirea semifabricatelor pe feţe zimţate măreşte stabilitatea acestora în timpul prelucrării şi necesita forţe de strângere mai mici.Cepii cu cap sferic se pot folosi şi pentru sprijinirea pe baze netede a pieselor mici, uşoare, la care forţele de strângere şi de aşchiere sunt mici. Sprijinul fiind punctiform, permit să se realizeze o distanta maximă între reazeme, ceea ce are o influenta pozitiva asupra orientării pieselor în dispozitiv.Asamblarea cepilor se realizează cu ajutorul cozilor care se presează în locaşurile executate în corpul dispozitivelor. Pentru a uşura prelucrarea şi presarea cepurilor şi în special pentru a permite înlocuire uşoara a lor după uzura, găurile se executa străpunse. Daca după asamblare nu se pot rectifica simultan feţele de lucru ale cepurilor plasate pe aceeaşi baza, atunci cota H ( înălţimea capului) se va executa cu tolerante pentru arbore în clasa a – 2 – a de precizie, după ajustaj alunecător.
17

Materialul boltului cilindric este OLC15 cementat 0,8-1,2 mm cu duritatea în suprafaţă după tratamentul termic: 55-60 HRC.
Prisme:
18

19

4.2. Proiectarea sistemelor de fixare a piesei
Brida Ca sistem de fixare se foloseste sistemul cu brida in forma de Z. Acesta are suficienta rigiditate si poate realiza forte de strangere care asigura strangerea necesara a piesei in dispozitiv. La un calcul simplu se determina forta care care trebuie sa se realizeze in surub pentru a obtine forta de strangere la capatul bridei.
S=forta de strangere realizata de bridaQ=forta necesara in surub pentru realizarea lui Sa=lungimea de la rezem la surubb=lungimea totala a bridei.η=randamentul transmiterii forteiSe calculeaza sectiunea minima a surubului ce va fi folosit :
=200 MPaSurubul folosit va fi M14Cu aceasta forta calculata, se verifica forta pe care o poate realiza omul, considerand ca forta medie realizata de om este de 10daN.initial se considera un brat al cheii de 350mm. In cazul in care folosind aceste date de intrare, se depaseste cu mult forta de strangere, se va proceda la limitarea fortei de strangere.
D=22mmµ=0.1d=14mmRealizand aceasta forta, forta de strangere a bridei va fi mai mare decat cea necesara.Desenul de executie al bridei este prezentat in figura de mai jos :
20

Material OSC8 calit la 55-60 HRC.Fiind element activ al dispozitivului muchiile active ale acestei bride se vor tesi la 1.5x45°.
Piulita
Pentru strangere se foloseste o piulita hexagonala inalta M14x1.5 STAS 4412-70.
21

Prezonul de strangere:
Prezonul de strangere a bridei M14x1.5 X 110, STAS 8458-87.Material: OL 37.
4.3 Proiectarea celorlalte elemente si constructia dispozitivului
Proiectarea corpului dispozitivului
Construcţia corpurilor dispozitivului depinde de forma şi mărimea semifabricatului care se prelucrează pe dispozitiv, întrucât aceasta determină: poziţia, forma şi mărimea reazemelor; forma, poziţia, mărimea şi tipul mecanismului de strângere; modul de legătură cu maşina – unealtă, procedeul de fabricaţie, etc.
Corpurile se pot fabrica prin mai multe procedee: turnate, sudate, asamblate cu şuruburi şi ştifturi, prelucrate din material forjat.
Când precizia dispozitivului poate fi afectată de tensiunile rămase din sudură se alege asamblarea prin şuruburi şi ştifturi. Toate elementele componente pot fi prelucrate îngrijit prin rectificare, după aplicarea unor tratamente termice de îmbunătăţire.
Construcţia corpului din elementele asamblate prezintă cea mai slabă rigiditate, motiv pentru care se utilizează numai în cazul unor corpuri simple formate din câteva elemente.
Pentru corpul dispozitivului se foloseste ca material OL 50.
Stabilirea elementelor de asamblare
Părţile componente ale dispozitivului se asamblează între ele, cu elemente de asamblare.
Asamblarea demontabilă oferă posibilitate prelucrării individuale a tuturor elementelor componente ale dispozitivului şi demontării lor în cazuri de necesitate, fără deteriorare.
Dezavantajul constă în volumul mare de prelucrări şi în rigiditatea uneori scăzută a dispozitivului.
Elementele principale de asamblare sunt: şuruburi, piuliţe, ştifturi cilindrice şi conice, ştifturi normalizate, şaibe, pene, etc. Elementele sunt în general standardizate şi normalizate, încât proiectantului îi revine sarcina de a alege din norme pe cele care se pretează mai bine scopului urmărit. Dimensiunile elementelor de asamblare se aleg, în general constructiv, uneori fiind însă necesară o verificare la solicitările la care sunt supuse.
Părţile componente ale dispozitivului se asamblează între ele, cu elemente de asamblare.
Asamblarea demontabilă oferă posibilitate prelucrării individuale a tuturor elementelor componente ale dispozitivului şi demontării lor în cazuri de necesitate, fără deteriorare.
Dezavantajul constă în volumul mare de prelucrări şi în rigiditatea uneori scăzută a dispozitivului.
Elementele principale de asamblare sunt: şuruburi, piuliţe, ştifturi cilindrice şi conice, ştifturi normalizate, şaibe, pene, etc. Elementele sunt în general standardizate şi normalizate, încât proiectantului îi revine sarcina de a alege din norme pe cele care se pretează mai bine
22

scopului urmărit. Dimensiunile elementelor de asamblare se aleg, în general constructiv, uneori fiind însă necesară o verificare la solicitările la care sunt supuse.
Suruburile ca elemente de asamblare demontabile în construcţia dispozitivelor sunt cele executate conform STAS 5144-80 cu cap cilindric înecat. Găurile şi lăcaşurile acestor şuruburi se dimensionează şi tolerează conform STAS 5783 – 72. Şuruburile se folosesc pentru fixarea a doua sau mai multe elemente a unui dispozitiv în poziţia în care au fost centrate.Lungimile de înşurubare se aleg în funcţie de diametrul filetului şi de natura materialului piesei.
Astfel pentru strangerea prismelor pe placa de baza si pentru fixarea gabaritului de reglare a frezei se folosesc şuruburi din oţel M10x40 STAS 5144-80, si a corpului de sustinere brida se folosesc suruburi M10x60 STAS 5144-80, figura 4.3.
Fig. 4.3Material OLC45 cu duritatea capului 38-45 HRC
Stifturile cilindrice şi conice se folosesc pentru poziţionarea elementelor dispozitivului în plan perpendicular pe axa ştifturilor. Găurile pentru ştifturi se tolerează în H7, iar pentru o asamblare corectă se indică toleranţa de poziţie la perpendicularitate de 0,01 mm. În construcţia dispozitivelor se folosesc ştifturi cilindrice forma „B” STAS 1599 – 80 care sunt tolerate în câmpul h8. Pentru centrarea corpului gabaritului de reglare a frezei si a corpului de sustinere cep de sprijin se folosesc stifturi d=5 cu urmatoarele caracteristici:
d=5mml=30mmc=0.8mm
23

Iar pentru centrarea prismelor se folosesc stifturi d=8 cu urmatoarele caracteristici:
d=8mml=60mmc=1.6mm
Ştifturile se folosesc pentru asigurarea poziţiei reciproce între două elemente ale dispozitivului. Se folosesc întotdeauna doua ştifturi. Şuruburile se folosesc pentru fixarea a doua sau mai multe elemente a unui dispozitiv în poziţia în care au fost centrate.
Material OL60 imbunatatit la 33-38 HRC.
Proiectarea elementelor de legătura a dispozitivului cu maşina – unealta
Dispozitivele mobile sunt prevăzute pe suprafeţele de aşezare cu tălpi sau picior de sprijin. Tălpile şi picioarele au suprafeţe mici de contact cu masa maşini – unealtă şi pot asigura dispozitivului o poziţionare corectă deoarece pot îndepărta rapid aşchiile întâlnite sub ele. Dispozitivele mobile ale căror corpuri sunt executate prin turnare sunt prevăzute cu tălpi, iar cele sudate sau asamblate cu picior de sprijin. Piciorul poate fi introdus în corpul dispozitivului prin înşurubare sau presate.
Găurile alungite şi urechile corpurilor turnate sunt prevăzute cu baraje, din turnare şi apoi frezate, iar cele ale corpurilor sudate cu lamaje, pe ale cărora suprafeţe urmează să se aşeze şaibele şi piuliţele se strângere.
Penele de ghidare fixe (STAS 8322/2-69) formează împreună cu corpul dispozitivului un ajustaj intermediar. Ambele tipuri de pene se introduc în canalele T printr-un ajustaj H7/H6. Poziţia suprafeţelor penelor care intră în corp, este limitată faţă de suprafeţele care intră în canalul T.
Material pentru penele de ghidare: OLC 10 cementat 0,8-1,2 mm şi călit la 55-60 HRC.
Strângerea penelor fixe în corpul dispozitivului se face cu şuruburi M6x12, STAS 5144-80, figura 4.5.
Fig. 4.5
24

Proiectarea elementelor de legătură cu maşina-unealtă
Urechile de prindere cu care este prevăzut dispozitivul sunt prezentate in figura 4.6.
Fig. 4.6
Dimensiunile elementelor de strângere, centrare şi orientare se aleg funcţie de dimensiunile canalelor T ale mesei maşinii, specifice tipului maşinii alese pentru prelucrare, conform celor arătate anterior.
Strângerea dispozitivului pe masa maşinii se face cu ajutorul şuruburilor pentru canale T , STAS 1386-70 şi a piuliţelor înalte, STAS 2097-51,fig.4.7.
25

Fig.4.7 Gabaritul pentru reglarea frezelor pe două direcţii este prezentat in figura 4.8.
Fig. 4.8Material : OLC 15 cementat 0,8....1,2 mm, călit la 50.....55 HRC
26

4.4 Alegerea materialelor pentru elementele dispozitivului
Materialele pentru elementele componente ale dispozitivelor se aleg corespunzător solicitărilor la care sunt supuse în funcţionare.
Materialele alese sunt prezentate în tabelul 4.4:
Tabelul 4.4Nr. Denumire Material Tratament termic2 Şurub M6, M8 OLC 45 -3 Ştift cilindric B8 OL 60 imbunatatit la 33-38 HRC4 Bolţ frezat OSC 8 calit la 55-60 HRC5 Bolţ cilindric OLC 15 cementat pe 0,8 – 1,2 mm şi călit
la 55 – 60 HRC6 Suport furcă OLC 45 Călire la 30 – 40 HRC7 Bolţuri OLC 45 -8 Ştift OL 60 Călire şi revenire la 33 – 38 HRC15 Placă OL 50
Modul de lucru cu dispozitivul
Se aşează piesa „Bucsa” pe reazemele dispozitivului proiectat în scopul frezarii unui canal de pana;
După orientarea piesei pe reazeme, se aduce roteste brida peste piesa, se aduce saiba detasabila in pozitia de strangere apoi se va realiza strangerea manuala de catre muncitor cu ajutorul unei chei dinamometrice;
Acesta prin intermediul surubului si piulitei va acţiona brida de fixare a dispozitivului care realizeaza fixarea piesei pe reazeme;
După orientarea şi fixarea piesei în dispozitiv, masa frezei împreună cu dispozitivul se vor poziţiona astfel încât să se realizeze prelucrarea;
Cu ajutorul unor cale de reglare se va realiza reglarea sculei (frezei) la dimensiunile necesare prelucrării;
După ce sa realizat prelucrarea se desfileteaza piulita Se roteste brida pana ce intra in contact cu opritorul prevazut pe reazemul bridei Se ridica piesa de pe reazeme Se repetă operaţiile enumerate mai sus pentru o altă piesă.
27

4.5 Analiza ergonomicitaţii dispozitivului proiectat
Denumirea provine din limba greacă, reprezentând un cuvânt compus din două elemente:Ergon = muncă, putere, forţă.
Nomos = descriere, lege, teorie, regulă.
A apărut ca necesitate a creşterii eficienţei activităţii umane în condiţiile dezvoltării economice şi sociale a omenirii.
Ergonomia este considerată "ştiinţa muncii”, având ca obiect de studiu relaţia om - muncă.
Ergonomia este o ştiinţă multidisciplinară prin metodă şi unitară prin obiectivul său care este optimizarea relaţiei om - muncă, prin adaptarea muncii la om şi a omului la meseria sa, în scopul creşterii continue şi accentuate a productivităţii muncii în condiţiile unui consum raţional de energie umană.
CAPACITATEA DE MUNCĂ
Capacitatea de muncă poate fi înţeleasă ca totalitatea posibilităţilor omului (fizice, psihice şi cerebrale) de a efectua o cantitate maximă de muncă.
Capacitatea de muncă poate avea dominantă :- fizică;- intelectuală.
În proiectarea ergonomică a muncii trebuie să se cunoască:- variaţia performanţelor capacităţii de muncă în funcţie de structura anatomo -
funcţională a organismului uman, de factorii de influenţă şi de specificul activităţii în care este folosită;
- posibilităţile şi limitele lor .Capacitatea de muncă se manifestă prin trei forme:
1. potenţială - totalizează resursele umane condiţionate de rezervele de energie ale organismului şi de anumiţi factori psihologici;
2. funcţională - utilizată efectiv în procesul muncii;3. de rezervă - utilizată în scopul îndeplinirii obligaţiilor sociale, familiale, culturale etc.
Analizand dispozitivul de lucru se poate concluziona:
masa dispozitivului 22 kg – deoarece nu necesita efort fizic ridicat nu se vor prevede aparate de ridicat, mai ales daca avem in vedere faptul ca aceasta solicitare nu este una ciclica cu frecventa efectuarii ridicata, dispozitivul se monteaza pe masa masinii la inceputul productiei si nu pentru fiecare piesa in parte.
orientare si fixarea dispozitivului – pentru aceasta, dispozitivul este prevazut cu pene de ghidare, care orienteaza in mod automat dispozitivul pe directia prelucrarii. Aceste pene de ghidare elimina eroarea care poate fi indusa de operator la orientarea gresita a dispozitivului pe masa masinii unelte.
28

dimensiunile dispozitivului –dimensiunile antropometrice ale muncitorului sunt prezentate in figura de mai jos
Dimensiunile antropometrice ale oamenilor sunt influenţate de mediul social şi geografic.
Dimensiunile antropometrice se împart în două categorii, după gradul de detaliere:
- dimensiuni globale;
- dimensiuni parţiale.
În proiectarea locului de muncă trebuie să se ţină cont în primul rând de dimensiunile globale, pentru ca operatorul să aibă o poziţie comodă şi pentru ca dispozitivele de comandă manuală să se găsească la înălţimea optimă. Dimensiunile antropologice globale cele mai importante sunt:
1. înălţimea totală în picioare (încălţat): media B (bărbaţi) = 1750 + 140 mm; media F (femei) = 1645 + 120 mm;
2. distanţa din vârful corpului până la suprafaţa de contact a feselor cu scaunul (poziţia aşezat, spate drept);3. distanţa de la spatele coapsei până la faţa genunchiului;
4. idem până la talpa piciorului întins;
5. distanţa de la partea de sus a genunchiului la talpă (pe sol);
6. distanţa de la spate la vârful degetului mijlociu al mâinii (braţ întins);
7. distanţa de la vârful cotului la excentricitatea degetului mijlociu al mâinii (braţ îndoit);
8. distanţa de la ochi până la sol (în picioare, încălţat);
9. distanţa (lăţimea) între coaste (braţe ridicate orizontal lateral).
Toate aceste dimensiuni se întâlnesc în tabele din literatura de specialitate.
Zonele de lucru normale şi maximale de lucru se apreciază în plan orizontal (fig.
6.4) şi în plan vertical (fig. 6.5).
29

Din analiza dimensiunilor dispozitivului, pe baza celor prezentate mai sus, se concluzioneaza ca dimensiunile acestuia sunt in concordanta cu cele antropometrice ale muncitorului.
masa si forma piesei : masa 2.5 Kg are o deosebita importanta deoarece piesa necesita manipulari repetate.
Din acest punct de vedere putem analiza varietatea si amploarea miscarilor efectuate de muncitor pentru orientarea piesei si pentru desprinderea ei.
La orientarea sau desprinderea piesei efortul fizic al muncitorului este minim, avand in vedere urmatoarele:
-masa piesei este mica;
- forma este una care permite manipularea usoara;
-zona de actiune a muncitorului este incadrata in zonele spatiale de actionare optime;
- Efortul intelectual este minim fata de celelalte variante analizate, orientarea facandu-se prin aducerea alezajului piesei in contact cu boltul cilindric, orientarea pe boltul frezat facandu-se prin simpla rotire a piesei pana ce o gaura a piesei este adusa in pozitia boltului frezat. Practic toate cotele suprafetei de realizat sunt realizate prin elemente de reazem si de orientare, fara a necesita actiuni suplimentare de masurare si de aducere in pozitie.
fixarea piesei in dispozitiv Se va tine cont de urmatoarele:
- Necesitatea mentinerii piesei in pozitia de strangere – piesa nu necesita mentinerea in aceasta pozitie deoarece aceasta pozitie este mentinuta de catre forta gravitational.
- Aplicarea fortei de strangere – forta de strangere este aplicata cu o cheie dinamometrica cu lungimea bratului de 350 mm, astfel incat efortul efectuat de catre muncitor sa nu depaseasca valoarea de 10daN, o valoare medie de actionare, tinand cont de frecventa efectuarii acestei activitati.
- Mentinerea fortei de strangere este o functie realizata de catre sistemul de strangere avand in vedere particularitatea de conservare a fortei de catre mecanismul surub-piulita folosit.
30

Pentru reglarea la cota a dispozitivului, acesta este prevazut cu un gabarit de reglare pe doua dimensiuni, care pozitioneaza scula in pozitiile extreme ale celor doua directii necesare pentru prelucrare. Si din acest punct de vedere efortul fizic si intelectual este minim.
4.6 Măsuri de protecţie la utilizarea dispozitivului
Pentru prevenirea accidentelor de munca si a îmbolnăvirilor profesionale se vor lua o serie de masuri preventive, dintre care se amintesc:
- personalul operator trebuie sa fie in permanenta instruit asupra modului de lucru la operaţia respectiva, si asupra masurilor ce trebuie sa le ia in momentul apariţiei unor fenomene necorespunzătoare procesului;
- intervenţiile la utilaje,altele decât cele specifice operaţiei, se vor face numai de către personalul de întreţinere/reglare special instruit in acest scop, si numai in stare de repaus a maşinii;
- echipamentul de lucru standard (salopeta, mănuşi, ochelari) este obligatoriu, daca normele specifice utilajului nu prevăd alte mijloace de protecţie;
- dispozitivele de lucru trebuie sa asigure o fixare rigida a pieselor. In cazul dispozitivelor pneumatice se vor prevede blocaje pentru a împiedica desprinderea piesei in caz de întrerupere a alimentarii cu aer.
- dispozitivele de fixare a pieselor sau sculelor, care executa diferite mişcări in timpul lucrului, vor fi lipsite de proeminente.
- sculele se vor verifica la intervale de timp corespunzătoare durabilităţii stabilite prin normative; cele care prezintă fisuri,lipsuri de material, depuneri de material, deformării ale zonei de prindere se înlocuiesc obligatoriu;
- la maşinile cu zona de aşezare/prindere a pieselor la o înălţime mai mare de 800 mm se vor prevede grătare suplimentare, executate din materiale antiderapante si izolatoare;
- în locurile de munca unde este necesar iluminatul local se va folosi tensiunea de 12/24/(max.36) V.
- pentru protecţia împotriva electrocutării, toate utilajele vor fi asigurate prin legarea la pământ şi la nul, conform standardelor si instrucţiunilor in vigoare.
- la operaţiile unde nu se pot folosi ecrane de protecţie, se vor utiliza ochelari sau viziere.
- înlăturarea aşchiilor se va face cu perii speciale sau cârlige. - evacuarea deşeurilor de la maşini unelte se face cel puţin o data pe schimb.
31

Bibliografie
1. Vlase A. s.a. – Tehnologii de prelucrare pe masini de frezat, 19932. Tache V. s.a. – Indrumar de proiectare a dispozitivelor, 19803. Chirita Gheorghe.s.a – Tolerante si ajustaje , Editura Universitatii din Pitesti , 2005
32
Top Related