







Languages
Pages
Legal

Dokumentation
Projekt
Neukonstruktion einer Radaufhängung
für einen Fußball-Roboter
von
Nils Kubitza
Matr.-Nr. 25211476
im Studium der Mechatronik (Diplom 1)
am Fachbereich Verteilte Systeme
Middle-Size Robocup Team
Carpe Noctem
Betreut durch M.Sc. Stephan Opfer (FB 16 Verteilte Systeme)
und Dipl. Ing. Christian Skaley (FB 15 Maschinenelemente und Tribologie)

Inhalt
1. Motivation
2. Ist-Zustand
3. Randbedingungen
4. Konzept-Studie
5. Umsetzung
6. Konstruktion
7. Berechnungen
8. Montagehinweis
9. Quellen
10. Anhang
(Datenblätter, technische Zeichnungen)
Seite 1
Seite 2
Seite 3
Seite 3-4
Seite 4-5
Seite 5
Seite 6-7
Seite 8
Seite 8

1. Motivation
Zum Zeitpunkt der Projekt-Annahme befand sich das Team Carpe Noctem gerade in der
Nachbereitung von einem Fußball-Roboter-Turnier der Robótica 2014 in Espinho Portugal. Die
Feldspieler des Teams fielen auf dem Turnier oft aus oder mussten teilweise ganz außer Betrieb
genommen werden. Grund dafür waren Materialermüdungen, die Getriebe-Wellen der Roboter-
Antriebe gingen immer wieder zu Bruch. Meist brach die Getriebewelle direkt ab oder die innere
Mechanik der Getriebe versagte so das kein Drehmoment mehr übertragen wurde. Trotz dieser
Rückschläge konnte das Team mit nur 3 Feldspielern, statt sonst 4, im Halbfinale gegen das
portugisische Team Cambada antreten und mit einem 2:4 Endergebnis zwar nicht siegen aber den
absoluten Favoriten deutlich überraschen , zur Halbzeit stand es gar 2:2 und Carpe Noctem war zu
diesem Zeitpunkt was Torchancen anging sogar überlegen. Leider stellten sich in der zweiten
Halbzeit abermals Fehlerquellen in der Hardware ein und so konnte sich das Team mit seiner
überlegene taktische Software Komponente leider nicht weiter behaupten, unter anderem gab es
teilweise noch Probleme mit Elektronik-Komponenten und der mechanischen Ballführung. Carpe
Noctem erzielte auf dem Turnier den 3. Platz und konnte abermals zeigen dass das deutsche Team
mit zu den internationalen Top-Teams in der Middle-Size-League zählt. Meine Motivation das
Team durch meine Mitarbeit zu unterstützen ist gefußt auf die offene gemeinschaftliche Struktur
des Teams und die Vielschichtigkeit in der robotischen Entwicklung. Die 8-jährige Team-Geschichte
hat eine Fülle an Meilensteinen aufzuweisen welche wissenschaftlich und im Wettbewerb
Anerkennung fanden. Der größte Gewinn den wir aus der Team-Struktur ziehen konnten ist das die
Motivation bei den Team-Mitgliedern immer wieder neu entfacht wurde und auf Turnieren
international zu neuen Standards und wertvollem Austausch führte. Evolutionäre Entwicklung in
einem kooperativen Liga-Betrieb und sportliche Motivation sind Erfolgs versprechend und stehen
im Gegensatz zur bestehenden Markt-Kultur der Konkurrenz.
(Abb. 1.1 - Roboter Stand 2010)
1
2. Ist-Zustand
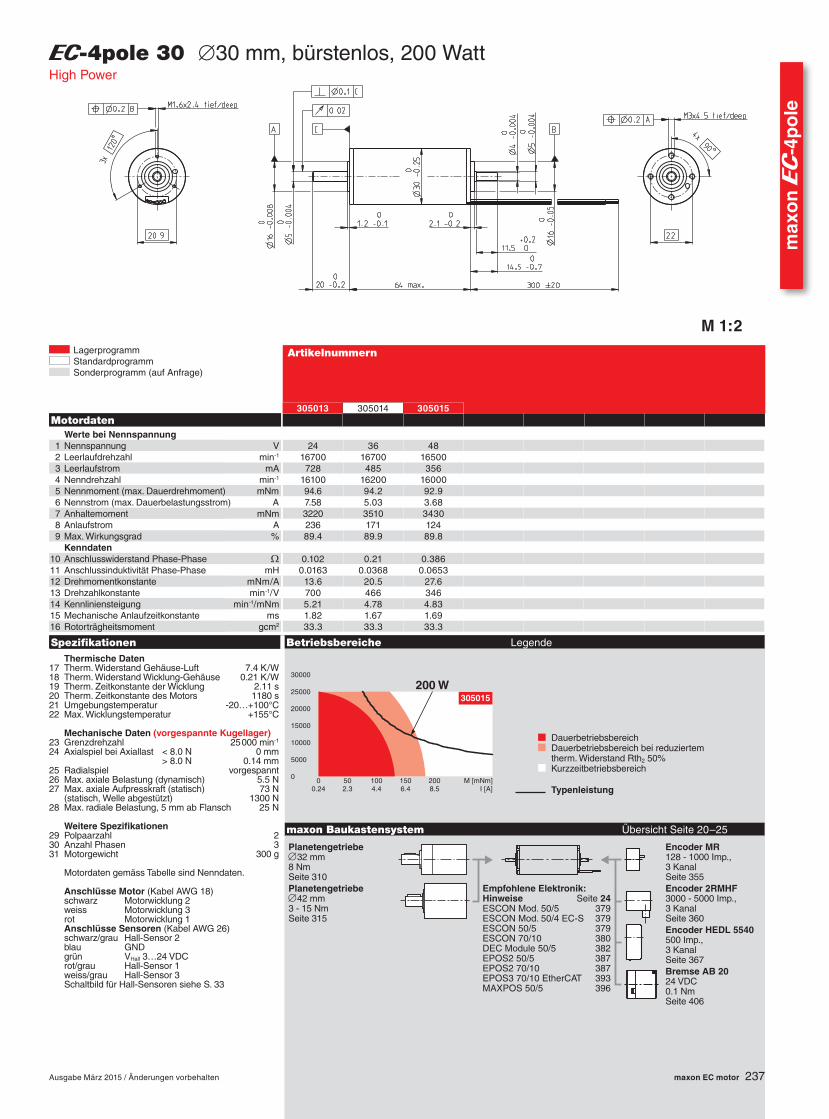
Die Roboter sind zum Zeitpunkt der Neuplanung ausgestattet mit bürstenlosen 200 Watt Motoren
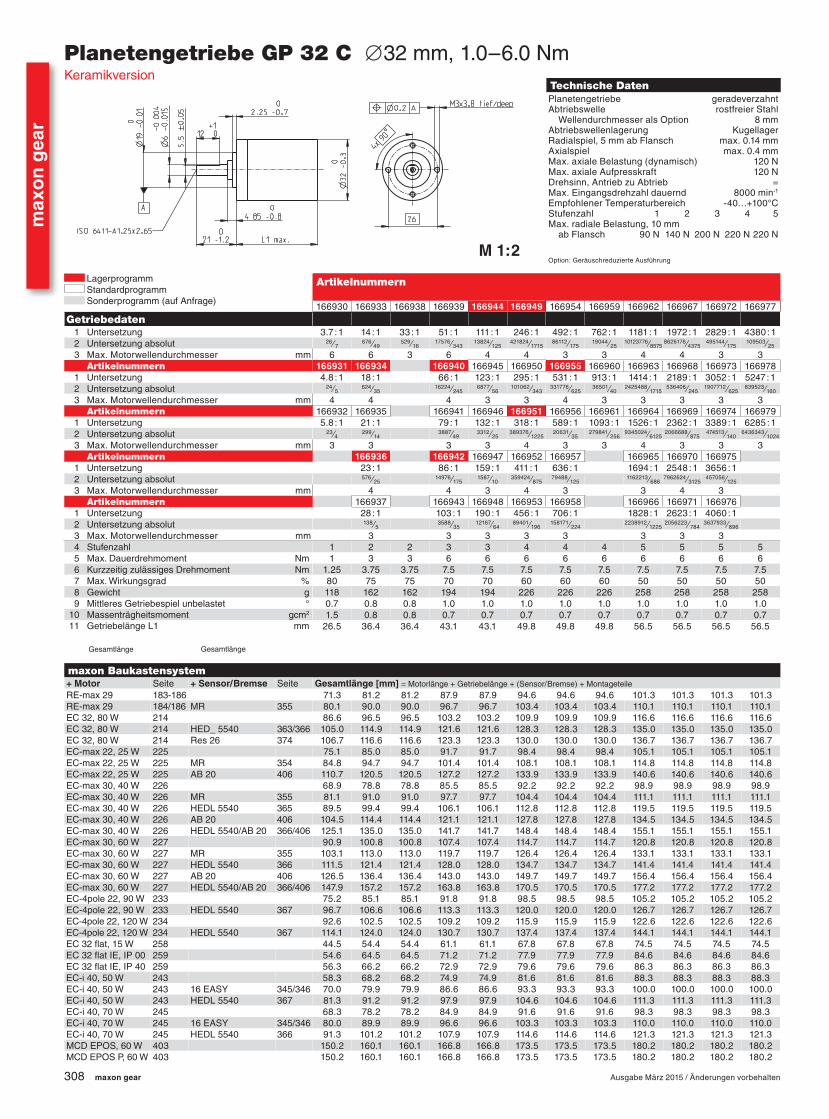
EC-4pole 30 mit 24 Volt der Firma Maxon [1] und mit Getrieben GP 32 C [2], mit einer Übersetzung
von 23:1, der gleichen Marke. In einer ersten Analyse dieser Kombination fällt auf, dass die
Getriebe für ein kurzzeitig zulässiges Drehmoment von 3,75 Nm in den Datenblättern des
Herstellers angegeben sind und einem maximalen Dauerdrehmoment von 3 Nm stand halten.
Vergleicht man diese Daten mit der aktuellen Motor- Getriebe-Kombination so erkennt man das
der Motor im Dauerbetriebsbereich durchaus an die 0,15 Nm heran kommt und in der
Kombination mit der Übersetzung ein Drehmoment von 3,45 Nm entsteht, was einer Übersteigung
der zulässigen Belastung um 0,45 Nm entspricht. Im Kurzzeitbetrieb des Motors kann man von
Drehmomenten höher des maximal zulässigen Drehmoments des Getriebes ausgehen.
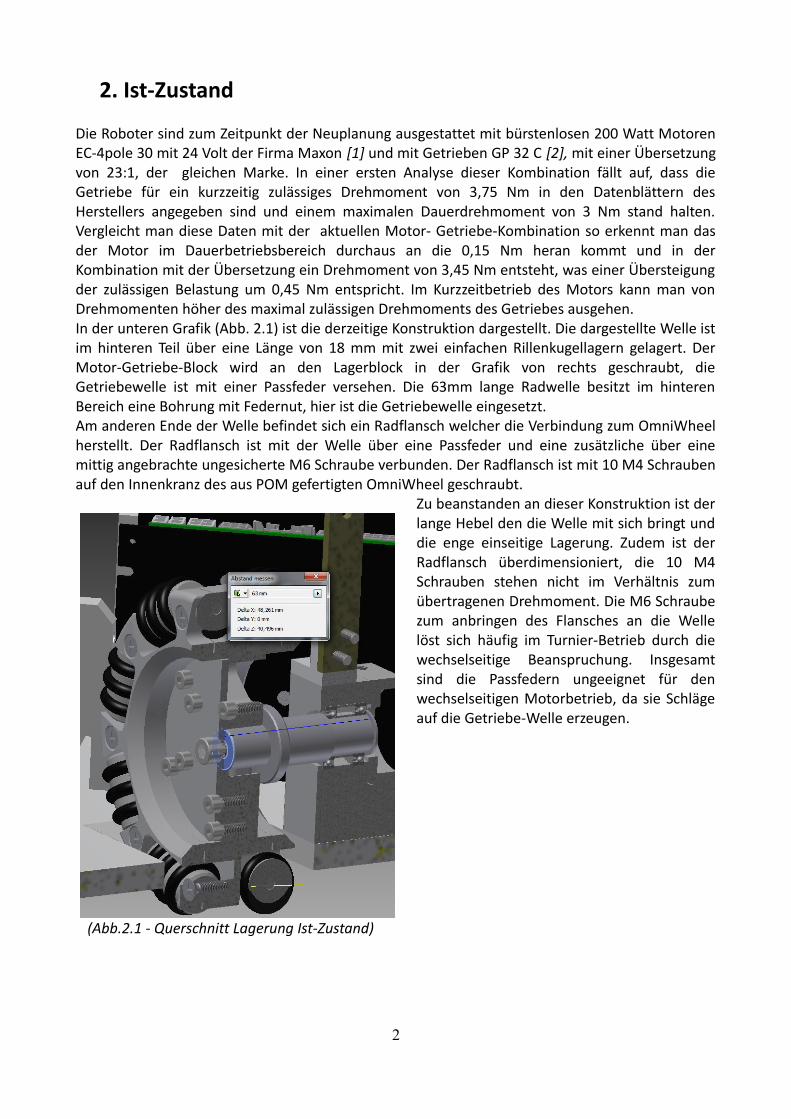
In der unteren Grafik (Abb. 2.1) ist die derzeitige Konstruktion dargestellt. Die dargestellte Welle ist
im hinteren Teil über eine Länge von 18 mm mit zwei einfachen Rillenkugellagern gelagert. Der
Motor-Getriebe-Block wird an den Lagerblock in der Grafik von rechts geschraubt, die
Getriebewelle ist mit einer Passfeder versehen. Die 63mm lange Radwelle besitzt im hinteren
Bereich eine Bohrung mit Federnut, hier ist die Getriebewelle eingesetzt.
Am anderen Ende der Welle befindet sich ein Radflansch welcher die Verbindung zum OmniWheel
herstellt. Der Radflansch ist mit der Welle über eine Passfeder und eine zusätzliche über eine
mittig angebrachte ungesicherte M6 Schraube verbunden. Der Radflansch ist mit 10 M4 Schrauben
auf den Innenkranz des aus POM gefertigten OmniWheel geschraubt.
(Abb.2.1 - Querschnitt Lagerung Ist-Zustand)
Zu beanstanden an dieser Konstruktion ist der
lange Hebel den die Welle mit sich bringt und
die enge einseitige Lagerung. Zudem ist der
Radflansch überdimensioniert, die 10 M4
Schrauben stehen nicht im Verhältnis zum
übertragenen Drehmoment. Die M6 Schraube
zum anbringen des Flansches an die Welle
löst sich häufig im Turnier-Betrieb durch die
wechselseitige Beanspruchung. Insgesamt
sind die Passfedern ungeeignet für den
wechselseitigen Motorbetrieb, da sie Schläge
auf die Getriebe-Welle erzeugen.
2
3. Randbedingungen
Eine Neukonstruktion muss unbedingt den engen Bauraum berücksichtigen, da sich im inneren Teil
des Roboters bereits die Kicker-Spule, der Industrie-PC und das Batteriefach befinden, sowie
zwischen den Rädern zusätzlich noch Elektronikplatinen montiert sind. Außerdem ist zu
berücksichtigen, dass sich auf den aktuellen Lagerblöcken Halterungen für den
Kamerabaumbefinden die entweder erhalten, angepasst werden müssen oder für die eine
alternative Lösung gefunden werden muss. Eine Neukonstruktion sollte die Getriebe schonen und
eine lange Lebenszeit garantieren. Eine Neukonstruktion sollte unter Berücksichtigung des
Gesamtgewichtes auf Dauerfestigkeit ausgelegt sein und gleichzeitig den geforderten Ansprüchen
genügen.
4. Konzept-Studie
In einer ersten Konzept-Studie wurde sehr breit nach Konzepten gesucht die in Betracht gezogen
werden können. Folgende Konstruktionen wurden dabei gedanklich skizziert.
Konzept Bewertung
Konzept A:
- Beidseitige Lagerung des Rades
- Verwendung eines stärkeren Maxon Getriebes
- Bestehende Motor-Getriebe Platzierung
Nachteil:
- Diese Konstruktion hätte im Innenraum des
Roboters durch das größere Getriebe zu
Kollisionen mit anderen Komponenten geführt
Konzept B:
- Beidseitige Lagerung des Rades
- Verwendung eines stärkeren Maxon Getriebes
- Neuplatzierung des Motor-Getriebe-Blocks im
Bauraum oberhalb des OmniWheels unter
Verwendung eines Zahnriemen zur
Antriebsanbindung
Vorteil:
- Entkoppelt Motor-Getriebe-Block von axialen
Schlägen, dadurch besonders schonend
Nachteil:
- Hoher konstruktiver Aufwand
- Teuer
Konzept C:
- Einseitige Lagerung des Rades
- Konstruktion eines eigenen Stirnrad-Getriebes
- Platzierung des Motors im Bauraum oberhalb
des OmniWheels
Vorteil:
- Einsparung eines Maxon Getriebes
Nachteil:
- Hoher konstruktiver Aufwand
- Unsicherheit bei der Konstruktion eines
eigenen Getriebes in Bezug auf Funktion und
Umsetzbarkeit
Konzept D:
- Verzicht auf zusätzliche Lagerung
- Verwendung eines stärkeren Maxon Getriebes
- Befestigung durch einspannen des Motor-
Getriebe-Blocks und direktes Aufflanschen des
OmniWheels
Vorteil:
- Geringer Aufwand bei gleichzeitiger
Platzersparnis
- Gute Erfahrungen mit dieser Lösung durch das
MSL Team aus Holland „Tech United“
3

Bei einer Recherche der bestehenden Lösungen von anderen MSL Teams stießen wir beim
holländischen Team Tech United [3] schließlich auf das beschriebene Konzept D. Die Einfachheit
und ausreichende Stabilität dieser Version motivierte uns alle anderen Pläne zu verwerfen.
5. Umsetzung
Bei der Umsetzung wurden zunächst verschiedene Konstruktions-Ansätze skizziert und in ein CAD-
Modell integriert. Nachstehend werden die verschiedenen Ansätze gezeigt und beschrieben. Die
Detaillierung und Optimierung der verschiedenen Entwürfe wurde dem Entwicklungsprozess
untergeordnet und ist nicht in jedem Entwurf voll ausgestaltet.
(Abb. 5.1 - Ansatz 1)
Ansatz 1:
Im ersten Entwurf wird der Getriebeblock über
eine Länge von 25 mm des Durchmessers
eingeklemmt. Um eine Parallelität des Oberen
Klemmelements zur Grundplatte zu garantieren
sind Passschrauben als Spannelemente
vorgesehen, damit soll eine spannungsfreie
Befestigung des Kamerabaums gewährleistet
werden.
(Abb. 5.2 - Ansatz 2)
Ansatz 2:
Im zweiten Entwurf ist der Befestigungsblock des
Kamerabaums nur im hinteren Bereich geteilt,
dadurch besteht weiterhin eine direkte stabile
Verbindung zwischen Kamerabaum und
Grundplatte, der Getriebeblock ist durch eine
Aussparung geführt und im hinteren Teil über
eine Länge von 10 mm des Durchmessers
geklemmt.
(Abb. 5.3 - Ansatz 3)
Ansatz 3:
Im dritten Entwurf ist der Kamerabaum gekürzt
und der geklemmte Getriebeblock verschiebbar
auf 2 Rundstangen gelagert, im oberen Teil sollen
dann Federn die Position des Rades fixieren und
bei erhöhten Kräften nachgeben um
Maximalkräfte auf die Getriebe-Welle zu
vermeiden.
4
Der stabile Sitz des Motorblocks ist die wichtigste Anforderung an den Konstruktionsansatz. Die
Entscheidung viel somit auf den ersten Ansatz da dort das Getriebe auf einer Länge von 25mm
fixiert wird. Der zweite Ansatz hätte einen absolut geraden Sitz des Kamerabaums garantiert, durch
den Einsatz von Passschrauben [4] kann das Problem aber kompensiert werden. Der dritte Ansatz
wäre eine Weiterentwicklung die auch mit unebenem Gelände zurecht käme wie es im Robocup in
der Zukunft angedacht ist. Zudem hätte es uns eine Sicherheit gegen Schläge garantiert. Die
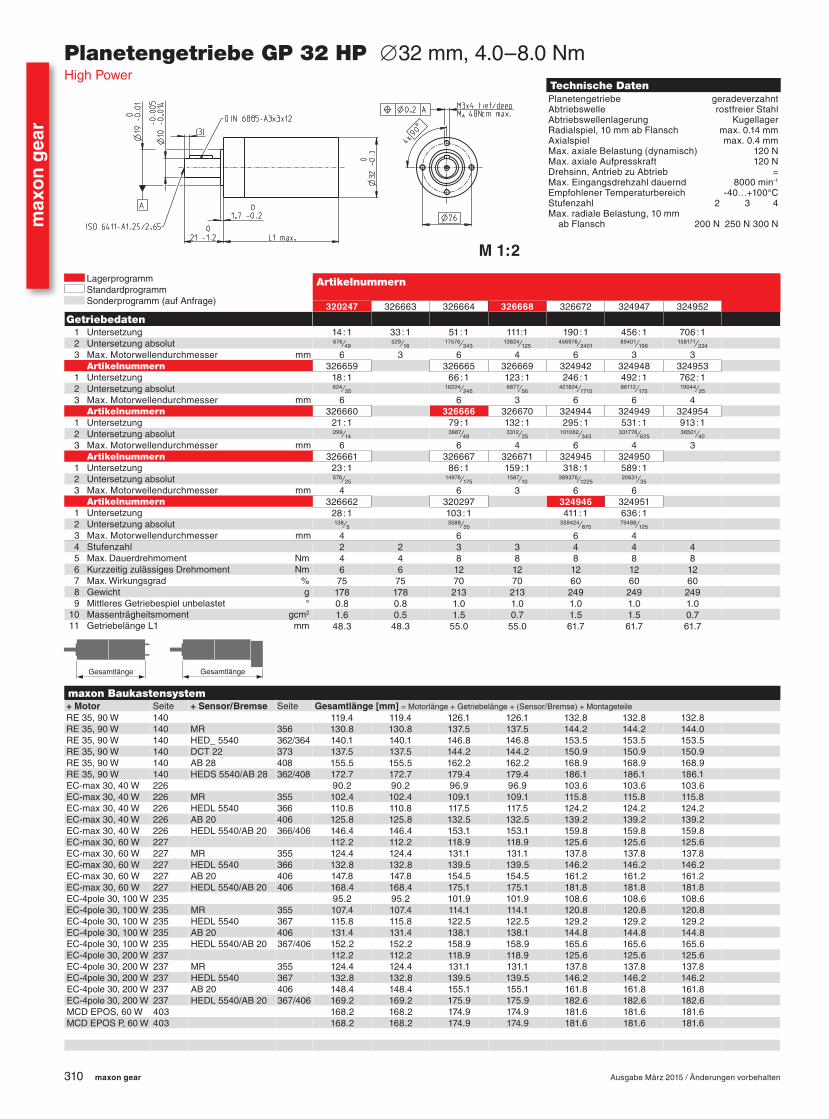
Herstellerangaben zur Belastbarkeit der neuen Getriebe Maxon GP 32 HP [5] mit einer
Übersetzung von 23:1 , die im Betrieb radial mit 200N (10 mm ab Flansch) belastet werden dürfen,
sind für unsere Anforderungen ausreichend. Bei 4 Achsen und einem Robotergewicht von ca. 30 kg
erhält mein einen Sicherheitsfaktor von 2,67.
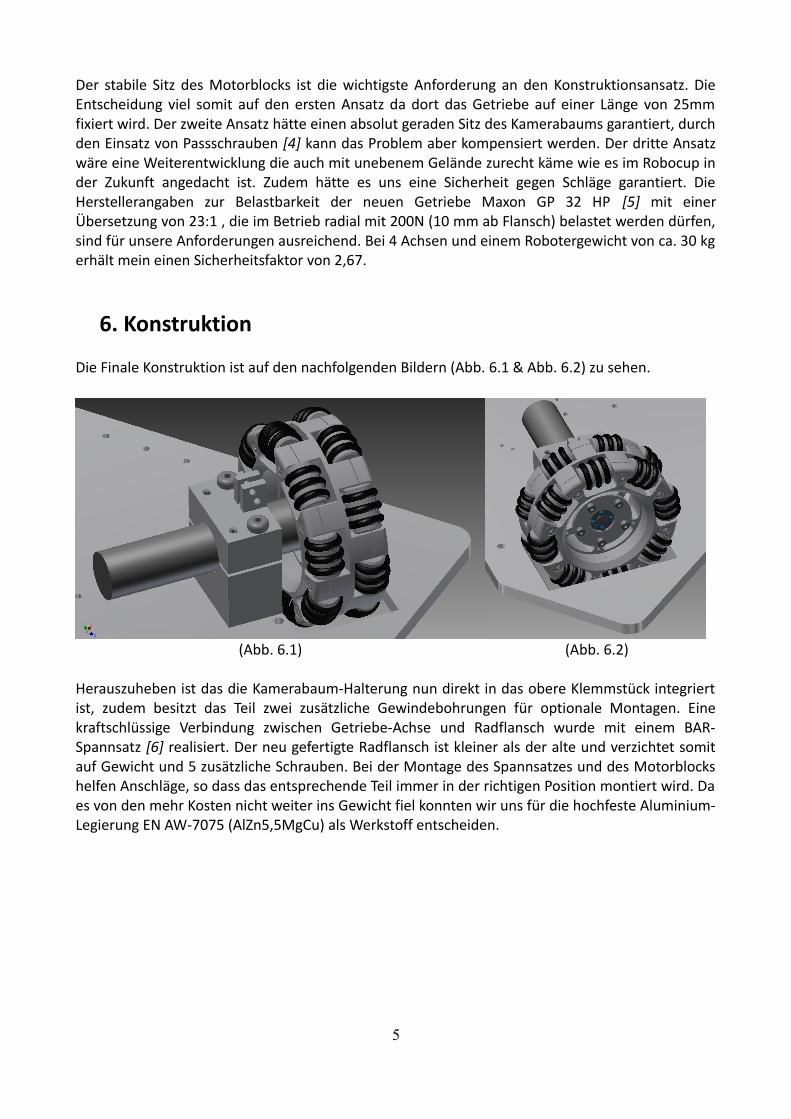
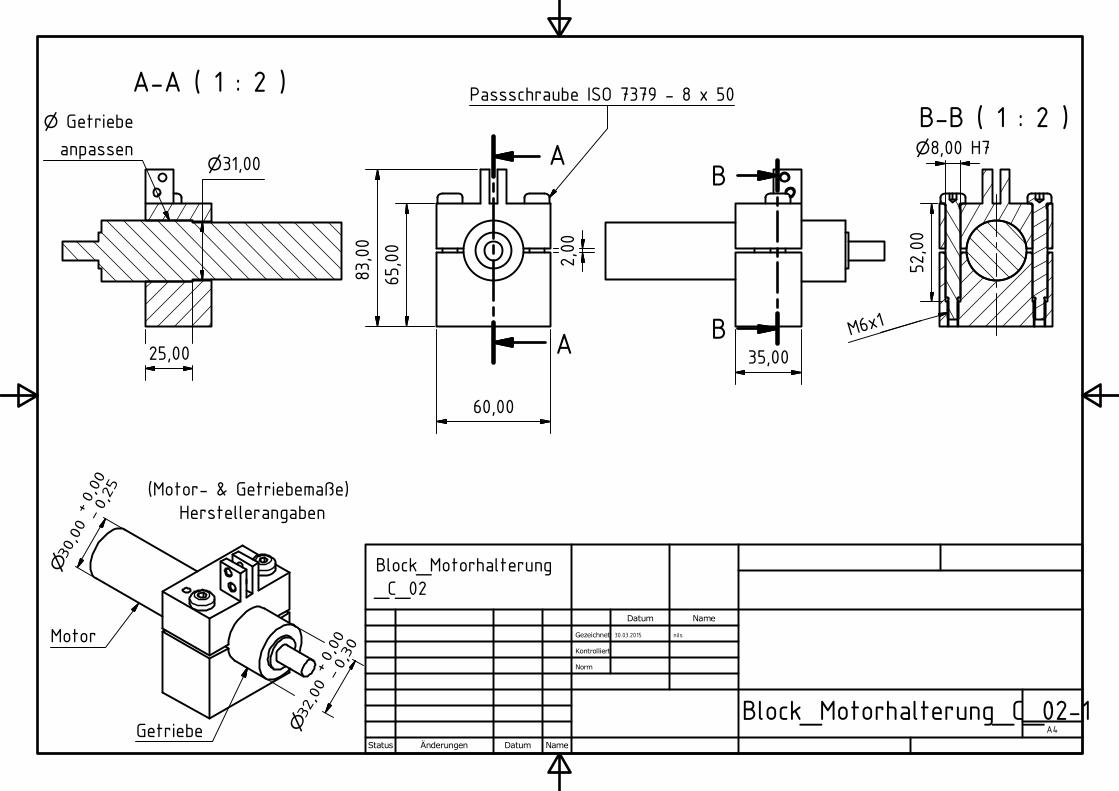
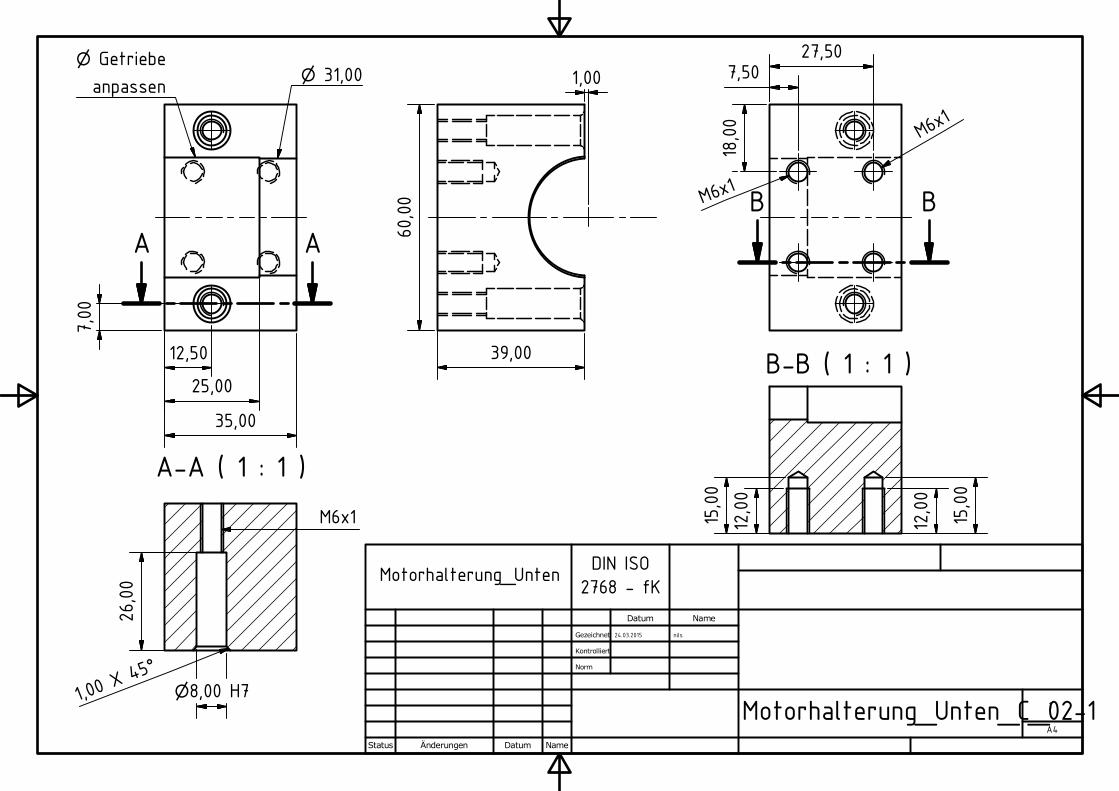
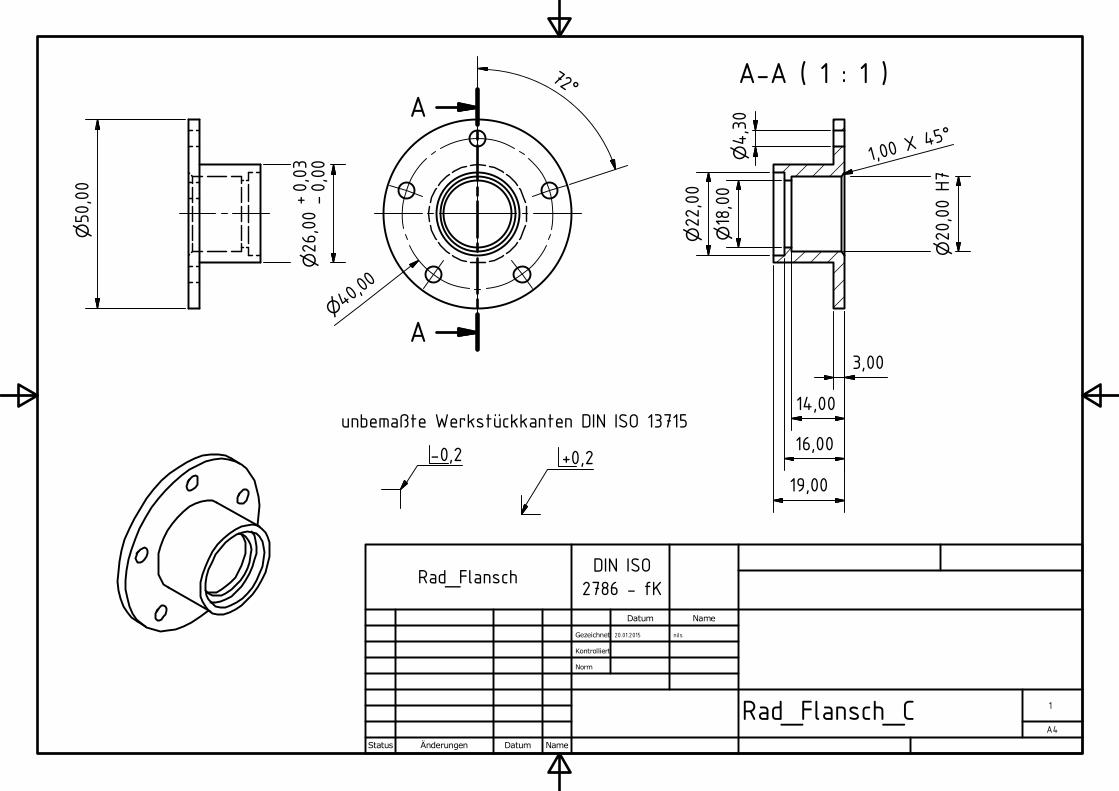
6. Konstruktion
Die Finale Konstruktion ist auf den nachfolgenden Bildern (Abb. 6.1 & Abb. 6.2) zu sehen.
(Abb. 6.1) (Abb. 6.2)
Herauszuheben ist das die Kamerabaum-Halterung nun direkt in das obere Klemmstück integriert
ist, zudem besitzt das Teil zwei zusätzliche Gewindebohrungen für optionale Montagen. Eine
kraftschlüssige Verbindung zwischen Getriebe-Achse und Radflansch wurde mit einem BAR-
Spannsatz [6] realisiert. Der neu gefertigte Radflansch ist kleiner als der alte und verzichtet somit
auf Gewicht und 5 zusätzliche Schrauben. Bei der Montage des Spannsatzes und des Motorblocks
helfen Anschläge, so dass das entsprechende Teil immer in der richtigen Position montiert wird. Da
es von den mehr Kosten nicht weiter ins Gewicht fiel konnten wir uns für die hochfeste Aluminium-
Legierung EN AW-7075 (AlZn5,5MgCu) als Werkstoff entscheiden.
5

7. Berechnungen
Formeln zur Berechnung sind der Literatur Roloff-Matek Maschinenelemente [7] entnommen.
Nomenklatur Pressverbindung:
F kl−Klemmkraft der Schraube [N ]T nenn−vonder Klemmverbindung zuübertragendes Nenndrehmoment [Nm]K A−Anwendungsfaktor zur Berücksichtigung der dynamischen BetriebsverhältnisseSH−Haftsicherheitμ−Haftbeiwert (Reibwert)DF−Fugendurchmesser [m ]n−Anzahl der SchraubenK−Korrekturfaktor für Flächenpressung
Berechnung Pressverbindung:
Nötige Klemmkraft der Schraube bei cosinusförmiger Flächenpressung und geteilter Scheibennabe:
F Kl≥2∗K A∗T nenn∗SH∗K
n∗π∗DF∗μ
T nenn → = 3,5 NmK A → = 1,5 (Stoßbehaftet; aus Tabelle TB 3-5 [7])SH → = 1,5μ → = 0,6 (aus Tabelle TB12-6a [7])DF → = 0,032m
n → = 2K → = π²/8 (cosinusförmige Flächenpressung)
F kl≥2∗1,5∗3,5Nm∗1,5∗
π2
8
2∗π∗0,032m∗0,06=1610,68N
Richtwerte zur Schraubenauswahl nach Roloff-Matek (Tabelle TB 8-13 [7]) für eine 10.9 M6
Schraube ist für die axiale Belastbarkeit statisch 6300 N und dynamisch 4000N. Die verwendete
Schulterpassschraube nach ISO 7397 12.9 M6 x 50 [4] ist nochmal stabiler, die nötige
Vorspannkraft bereitet also keine Probleme.
6

Nomenklatur Anziehdrehmoment:
M A−Anziehdrehmoment [Nm]M G−Gewindemoment [Nm ]M RA−Auflagereibungsmoment [Nm]F VM−Montagevorspannkraft der Schraube [N ]d 2−Flankendurchmesser desGewindes[m ]ϕ−Steigungswinkel desGewindes[° ]θ '−Reibungswinkel desGewindesμG−ReibungszahlμK−Reibungszahl für die Auflagerfläched K−wirksamer Reibungsdurchmesser für Auflagereibungsmoment in
der Schraubenkopf −oder Mutterauflage [m ]d−Schraubendurchmesser [m ]
Berechnung Anziehdrehmoment:
Ausgehend von dem zuvor errechneten Wert der nötigen Schraubenklemmkraft, rechnen wir nun
mit überschlägig 2000N für die Montagevorspannkraft weiter.
M A=M G+M RA=F VM∗(d 2
2)∗tan (ϕ+θ)+F VM∗μK∗(
d K
2)
F VM → = 2000N
d 2 → (M6) = 5,35 mmϕ → = 3,41° (aus Tabelle TB 8-1 bzw. TB 8.2 [7])μG → = 0,15 (aus Tabelle TB 8-12b [7])θ '=1,155∗μG=1,155∗0,15=0,17 °μK → = 0,15 (aus Tabelle TB 8 – 12c [7])d K
2=0,65∗d=0,65∗6mm=3,9mm
M A=2000N∗(0,00535
2)∗tan(3,41 °+0,17°)+2000N∗0,15∗0,0039m=1,5Nm
7

8. Montagehinweis
Die markierten Schulterpassschrauben (in Abb. 8.1) sind mit einem Drehmomentschlüssel mit
1,5 Nm anzuziehen.
(Abb. 8.1)
9. Quellen
[1] Maxon, (Motor) EC-4pole 30, 24 Volt, Artikelnummer: 305013, März 2015,
www.maxonmotor.de/medias/sys_master/root/8816221945886/15-237-DE.pdf
[2] Maxon, Planetengetriebe GP 32 C, 23:1, Artikelnummer: 166936, März 2015,
www.maxonmotor.de/medias/sys_master/root/8816227123230/15-307-308-DE.pdf
[3] Tech United, Turtle Version 5, www.techunited.nl/en/turtle-robot
[4] ISO 7379 Schulterpassschraube 8 -M6x50 12.9 F9, Versand: Lange GmbH & Co. KG, Frankfurter
Straße 201A, 34134 Kassel, Artikel-ID: 7379-12-6-50,
www.schrauben-lange.de/artikel/schulterpassschraube-8-m-6x50-12-9-f9
[5] Maxon, Planetengetriebe GP 32 HP, 23:1, Artikelnummer: 326661, März 2015,
www.maxonmotor.de/medias/sys_master/root/8816227254302/15-310-DE.pdf
[6] Spannsatz BAR, d=10, D=20, Artikelnummer: 61541000, Internet-Versand: Mädler GmbH,
www.maedler.de/product/1643/1621/spannsaetze-bar-bohrung-5-bis-100-mm
[7] Roloff/Matek Maschinenelemente (21. Auflage); 2013; Herbert Wittel, Dieter Muhs, Dieter
Jannasch, Joachim Voßiek; Springer Vieweg
8
A-A ( 1 : 2 )
B-B ( 1 : 2 )
A
AB
B
1
A4
Block_Motorhalterung_C_02-1Status nderungen Datum Name
Gezeichnet
Kontrolliert
Norm
Datum Name
30.03.2015 nils
60,0065
,00
83,00
35,00
31,00
30,00-0,25
0,00
+
32,00-0,30
0,00
+
25,00
Passschraube ISO 7379 - 8 x 50
52,00
M6x1
Block_Motorhalterung
_C_02
(Motor- & Getriebema e)
Herstellerangaben
8,00 H7
2,00
Motor
Getriebe
Getriebe
anpassen

A-A ( 1 : 1 )
B-B ( 1 : 1 )
C-C ( 1 : 1 )
A A
BB
C
C
1
A4
Motorhalterung_Oben_C_02-1Status nderungen Datum Name
Gezeichnet
Kontrolliert
Norm
Datum Name
17.03.2015 nils
35,00
25,00
1,00
4,0012,00
6,00
9,00
15,00
18,00
14,00
4,40
24,00
1,00 X 45
8,00 H7 DURCH
DIN ISO
2768 - fKMotorhalterung_Oben
0,50 X 45 0,50 X 45
4,00
M5x0.8
Getriebe
anpassen60
,00
31,00
A-A ( 1 : 1 )
B-B ( 1 : 1 )
A A
B B
1
A4
Motorhalterung_Unten_C_02-1Status nderungen Datum Name
Gezeichnet
Kontrolliert
Norm
Datum Name
24.03.2015 nils
1,00
39,00
60,00
25,00
35,00
8,00 H7
M6x1
26,00
1,00 X
45
DIN ISO
2768 - fKMotorhalterung_Unten
15,00
15,00
7,50
18,00
27,50
12,00
M6x1
M6x1
12,00
Getriebe
anpassen 31,00
7,00
12,50
A-A ( 1 : 1 )A
A
1
A4
Rad_Flansch_CStatus nderungen Datum Name
Gezeichnet
Kontrolliert
Norm
Datum Name
20.01.2015 nils
unbema te Werkst ckkanten DIN ISO 13715
Rad_Flansch
50,00
22,00
18,00
20,00
H7
1,00 X 454
,30
14,00
16,00
19,00
26,00-0,00
0,03
+
3,00
DIN ISO
2786 - fK
-0,2 +0,2
72
40,00
maxo
n E
C m
oto
r
237
maxo
n
-4p
ole
237
maxo
n
-4p
ole
237
24 36 4816700 16700 16500728 485 356
16100 16200 1600094.6 94.2 92.97.58 5.03 3.683220 3510 3430236 171 12489.4 89.9 89.8
0.102 0.21 0.3860.0163 0.0368 0.0653
13.6 20.5 27.6700 466 3465.21 4.78 4.831.82 1.67 1.6933.3 33.3 33.3
M 1:2
0 50 100 150 200 M [mNm]
0.24 2.3 4.4 6.4 8.5 I [A]
0
5000
10000
15000
20000
25000
30000
305015
200 W
305013 305014 305015
7.4 K/W 0.21 K/W 2.11 s 1180 s -20…+100°C +155°C
< 8.0 N 0 mm > 8.0 N 0.14 mm
5.5 N 73 N
1300 N 25 N
2 3 300 g
ESCON Mod. 50/5 379ESCON Mod. 50/4 EC-S 379ESCON 50/5 379ESCON 70/10 380DEC Module 50/5 382EPOS2 50/5 387EPOS2 70/10 387EPOS3 70/10 EtherCAT 393MAXPOS 50/5 396
Ausgabe März 2015 / Änderungen vorbehalten maxon EC motor
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
Artikelnummern
Spezifikationen Betriebsbereiche Legende
Dauerbetriebsbereich Dauerbetriebsbereich bei reduziertem therm. Widerstand Rth2 50% Kurzzeitbetriebsbereich
Typenleistung
maxon Baukastensystem Übersicht Seite 20–25
-4pole 30 ∅30 mm, bürstenlos, 200 WattHigh Power
Motordaten
Werte bei Nennspannung
1 Nennspannung V2 Leerlaufdrehzahl min-1
3 Leerlaufstrom mA4 Nenndrehzahl min-1
5 Nennmoment (max. Dauerdrehmoment) mNm6 Nennstrom (max. Dauerbelastungsstrom) A7 Anhaltemoment mNm8 Anlaufstrom A9 Max. Wirkungsgrad %
Kenndaten
10 Anschlusswiderstand Phase-Phase W11 Anschlussinduktivität Phase-Phase mH12 Drehmomentkonstante mNm/A13 Drehzahlkonstante min-1/V14 Kennliniensteigung min-1/mNm15 Mechanische Anlaufzeitkonstante ms16 Rotorträgheitsmoment gcm2
Thermische Daten17 Therm. Widerstand Gehäuse-Luft 18 Therm. Widerstand Wicklung-Gehäuse 19 Therm. Zeitkonstante der Wicklung 20 Therm. Zeitkonstante des Motors 21 Umgebungstemperatur 22 Max. Wicklungstemperatur
Mechanische Daten (vorgespannte Kugellager)23 Grenzdrehzahl 25 000 min-1
24 Axialspiel bei Axiallast
25 Radialspiel vorgespannt26 Max. axiale Belastung (dynamisch) 27 Max. axiale Aufpresskraft (statisch)
(statisch, Welle abgestützt) 28 Max. radiale Belastung, 5 mm ab Flansch
Weitere Spezifikationen29 Polpaarzahl 30 Anzahl Phasen 31 Motorgewicht
Motordaten gemäss Tabelle sind Nenndaten.
Anschlüsse Motor (Kabel AWG 18) schwarz Motorwicklung 2 weiss Motorwicklung 3 rot Motorwicklung 1 Anschlüsse Sensoren (Kabel AWG 26) schwarz/grau Hall-Sensor 2 blau GND grün VHall 3…24 VDC rot/grau Hall-Sensor 1 weiss/grau Hall-Sensor 3 Schaltbild für Hall-Sensoren siehe S. 33
Planetengetriebe∅32 mm8 NmSeite 310Planetengetriebe∅42 mm3 - 15 NmSeite 315
Encoder MR128 - 1000 Imp.,3 KanalSeite 355
Encoder HEDL 5540500 Imp., 3 KanalSeite 367
Encoder 2RMHF3000 - 5000 Imp.,3 KanalSeite 360
Bremse AB 2024 VDC0.1 NmSeite 406
Empfohlene Elektronik:Hinweise Seite 24
maxo
n g
ear
310
RE 35, 90 W 140 119.4 119.4 126.1 126.1 132.8 132.8 132.8RE 35, 90 W 140 MR 356 130.8 130.8 137.5 137.5 144.2 144.2 144.0RE 35, 90 W 140 HED_ 5540 362/364 140.1 140.1 146.8 146.8 153.5 153.5 153.5RE 35, 90 W 140 DCT 22 373 137.5 137.5 144.2 144.2 150.9 150.9 150.9RE 35, 90 W 140 AB 28 408 155.5 155.5 162.2 162.2 168.9 168.9 168.9RE 35, 90 W 140 HEDS 5540/AB 28 362/408 172.7 172.7 179.4 179.4 186.1 186.1 186.1EC-max 30, 40 W 226 90.2 90.2 96.9 96.9 103.6 103.6 103.6EC-max 30, 40 W 226 MR 355 102.4 102.4 109.1 109.1 115.8 115.8 115.8EC-max 30, 40 W 226 HEDL 5540 366 110.8 110.8 117.5 117.5 124.2 124.2 124.2EC-max 30, 40 W 226 AB 20 406 125.8 125.8 132.5 132.5 139.2 139.2 139.2EC-max 30, 40 W 226 HEDL 5540/AB 20 366/406 146.4 146.4 153.1 153.1 159.8 159.8 159.8EC-max 30, 60 W 227 112.2 112.2 118.9 118.9 125.6 125.6 125.6EC-max 30, 60 W 227 MR 355 124.4 124.4 131.1 131.1 137.8 137.8 137.8EC-max 30, 60 W 227 HEDL 5540 366 132.8 132.8 139.5 139.5 146.2 146.2 146.2EC-max 30, 60 W 227 AB 20 406 147.8 147.8 154.5 154.5 161.2 161.2 161.2EC-max 30, 60 W 227 HEDL 5540/AB 20 406 168.4 168.4 175.1 175.1 181.8 181.8 181.8EC-4pole 30, 100 W 235 95.2 95.2 101.9 101.9 108.6 108.6 108.6EC-4pole 30, 100 W 235 MR 355 107.4 107.4 114.1 114.1 120.8 120.8 120.8EC-4pole 30, 100 W 235 HEDL 5540 367 115.8 115.8 122.5 122.5 129.2 129.2 129.2EC-4pole 30, 100 W 235 AB 20 406 131.4 131.4 138.1 138.1 144.8 144.8 144.8EC-4pole 30, 100 W 235 HEDL 5540/AB 20 367/406 152.2 152.2 158.9 158.9 165.6 165.6 165.6EC-4pole 30, 200 W 237 112.2 112.2 118.9 118.9 125.6 125.6 125.6EC-4pole 30, 200 W 237 MR 355 124.4 124.4 131.1 131.1 137.8 137.8 137.8EC-4pole 30, 200 W 237 HEDL 5540 367 132.8 132.8 139.5 139.5 146.2 146.2 146.2EC-4pole 30, 200 W 237 AB 20 406 148.4 148.4 155.1 155.1 161.8 161.8 161.8EC-4pole 30, 200 W 237 HEDL 5540/AB 20 367/406 169.2 169.2 175.9 175.9 182.6 182.6 182.6MCD EPOS, 60 W 403 168.2 168.2 174.9 174.9 181.6 181.6 181.6MCD EPOS P, 60 W 403 168.2 168.2 174.9 174.9 181.6 181.6 181.6
320247 326663 326664 326668 326672 324947 324952
14 : 1 33 : 1 51 : 1 111:1 190 : 1 456 : 1 706 : 1676⁄49
529⁄1617576⁄343
13824⁄125456976⁄2401
89401⁄196158171⁄224
6 3 6 4 6 3 3326659 326665 326669 324942 324948 324953
18 : 1 66 : 1 123 : 1 246 : 1 492 : 1 762 : 1624⁄35
16224⁄2456877⁄56
421824⁄171586112 ⁄175
19044⁄25
6 6 3 6 6 4326660 326666 326670 324944 324949 324954
21 : 1 79 : 1 132 : 1 295 : 1 531 : 1 913 : 1299⁄14
3887⁄493312 ⁄25
101062 ⁄343331776⁄625
36501⁄40
6 6 4 6 4 3326661 326667 326671 324945 324950
23 : 1 86 : 1 159 : 1 318 : 1 589 : 1576⁄25
14976⁄1751587⁄10
389376⁄122520631⁄35
4 6 3 6 6326662 320297 324946 324951
28 : 1 103 : 1 411 : 1 636 : 1138⁄5 3588⁄35
359424⁄87579488⁄125
4 6 6 42 2 3 3 4 4 44 4 8 8 8 8 86 6 12 12 12 12 1275 75 70 70 60 60 60178 178 213 213 249 249 2490.8 0.8 1.0 1.0 1.0 1.0 1.01.6 0.5 1.5 0.7 1.5 1.5 0.7
48.3 48.3 55.0 55.0 61.7 61.7 61.7
M 1:2
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
maxon gear Ausgabe März 2015 / Änderungen vorbehalten
Gesamtlänge Gesamtlänge
maxon Baukastensystem
+ Motor Seite + Sensor/Bremse Seite Gesamtlänge [mm] = Motorlänge + Getriebelänge + (Sensor/Bremse) + Montageteile
Technische Daten
Planetengetriebe geradeverzahntAbtriebswelle rostfreier StahlAbtriebswellenlagerung KugellagerRadialspiel, 10 mm ab Flansch max. 0.14 mmAxialspiel max. 0.4 mmMax. axiale Belastung (dynamisch) 120 NMax. axiale Aufpresskraft 120 NDrehsinn, Antrieb zu Abtrieb =Max. Eingangsdrehzahl dauernd 8000 min-1
Empfohlener Temperaturbereich -40…+100°CStufenzahl 2 3 4Max. radiale Belastung, 10 mm ab Flansch 200 N 250 N 300 N
Planetengetriebe GP 32 HP ∅32 mm, 4.0–8.0 NmHigh Power
Artikelnummern
Getriebedaten
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm 4 Stufenzahl 5 Max. Dauerdrehmoment Nm 6 Kurzzeitig zulässiges Drehmoment Nm 7 Max. Wirkungsgrad % 8 Gewicht g 9 Mittleres Getriebespiel unbelastet ° 10 Massenträgheitsmoment gcm2
11 Getriebelänge L1 mm

maxo
n g
ear
307
RE 25, 10 W 135/137 81.1 91.0 91.0 97.7 97.7 104.4 104.4 104.4 111.1 111.1 111.1 111.1RE 25, 10 W 135/137 MR 355 92.1 102.0 102.0 108.7 108.7 115.4 115.4 115.4 122.1 122.1 122.1 122.1RE 25, 10 W 135/137 Enc 22 361 95.2 105.1 105.1 111.8 111.8 118.5 118.5 118.5 125.2 125.2 125.2 125.2RE 25, 10 W 135/137 HED_ 5540 362/364 101.9 111.8 111.8 118.5 118.5 125.2 125.2 125.2 131.9 131.9 131.9 131.9RE 25, 10 W 135/137 DCT 22 373 103.4 113.3 113.3 120.0 120.0 126.7 126.7 126.7 133.4 133.4 133.4 133.4RE 25, 20 W 136 69.6 79.5 79.5 86.2 86.2 92.9 92.9 92.9 99.6 99.6 99.6 99.6RE 25, 20 W 136 MR 355 80.6 90.5 90.5 97.2 97.2 103.9 103.9 103.9 110.6 110.6 110.6 110.6RE 25, 20 W 136 HED_ 5540 363/366 90.4 100.3 100.3 107.0 107.0 113.7 113.7 113.7 120.4 120.4 120.4 120.4RE 25, 20 W 136 DCT22 373 91.9 101.8 101.8 108.5 108.5 115.2 115.2 115.2 121.9 121.9 121.9 121.9RE 25, 20 W 136 AB 28 408 103.7 113.6 113.6 120.3 120.3 127.0 127.0 127.0 133.7 133.7 133.7 133.7RE 25, 20 W 136 HED_ 5540/AB 28 363/408 120.9 130.8 130.8 137.5 137.5 144.2 144.2 144.2 150.9 150.9 150.9 150.9RE 25, 20 W 137 AB 28 408 115.2 125.1 125.1 131.8 131.8 138.5 138.5 138.5 145.2 145.2 145.2 145.2RE 25, 20 W 137 HED_5540/AB 28 408 132.4 142.3 142.3 149.0 149.0 155.7 155.7 155.7 162.4 162.4 162.4 162.4RE 30, 60 W 139 94.6 104.5 104.5 111.2 111.2 117.9 117.9 117.9 124.6 124.6 124.6 124.6RE 30, 60 W 139 MR 356 106.0 115.9 115.9 122.6 122.6 129.3 129.3 129.3 136.0 136.0 136.0 136.0RE 30, 60 W 139 HED_ 5540 362/364 115.4 125.3 125.3 132.0 132.0 138.7 138.7 138.7 145.4 145.4 145.4 145.4RE 35, 90 W 140 97.6 107.5 107.5 114.2 114.2 120.9 120.9 120.9 127.6 127.6 127.6 127.6RE 35, 90 W 140 MR 356 109.0 118.9 118.9 125.6 125.6 132.3 132.3 132.3 139.0 139.0 139.0 139.0RE 35, 90 W 140 HED_ 5540 362/364 118.3 128.2 128.2 134.9 134.9 141.6 141.6 141.6 148.3 148.3 148.3 148.3RE 35, 90 W 140 DCT 22 374 115.7 125.6 125.6 132.3 132.3 139.0 139.0 139.0 145.7 145.7 145.7 145.7RE 35, 90 W 140 AB 28 408 133.7 143.6 143.6 150.3 150.3 157.0 157.0 157.0 163.7 163.7 163.7 163.7RE 35, 90 W 140 HEDS 5540/AB 28 362/408 150.9 160.8 160.8 167.5 167.5 174.2 174.2 174.2 180.9 180.9 180.9 180.9A-max 26 161-168 71.3 81.2 81.2 87.9 87.9 94.6 94.6 94.6 101.3 101.3 101.3 101.3A-max 26 162-168 MEnc 13 372 78.4 88.3 88.3 95.0 95.0 101.7 101.7 101.7 108.4 108.4 108.4 108.4A-max 26 162-168 MR 355 80.1 90.0 90.0 96.7 96.7 103.4 103.4 103.4 110.1 110.1 110.1 110.1A-max 26 162-168 Enc 22 361 85.7 95.6 95.6 102.3 102.3 109.0 109.0 109.0 115.7 115.7 115.7 115.7A-max 26 162-168 HED_ 5540 363/365 89.7 99.6 99.6 106.3 106.3 113.0 113.0 113.0 119.7 119.7 119.7 119.7A-max 32 169/171 89.5 99.4 99.4 106.1 106.1 112.8 112.8 112.8 119.5 119.5 119.5 119.5A-max 32 170/172 88.1 98.0 98.0 104.7 104.7 111.4 111.4 111.4 118.1 118.1 118.1 118.1A-max 32 170/172 MR 356 99.3 109.2 109.2 115.9 115.9 122.6 122.6 122.6 129.3 129.3 129.3 129.3A-max 32 170/172 HED_ 5540 363/365 108.9 118.8 118.8 125.5 125.5 132.2 132.2 132.2 138.9 138.9 138.9 138.9
166930 166933 166938 166939 166944 166949 166954 166959 166962 166967 166972 166977
3.7 : 1 14 : 1 33 : 1 51 : 1 111 : 1 246 : 1 492 : 1 762 : 1 1181 : 1 1972 : 1 2829 : 1 4380 : 126⁄ 7
676⁄49529⁄16
17576⁄34313824⁄125
421824⁄171586112 ⁄175
19044⁄2510123776⁄8575
8626176⁄4375495144⁄175
109503⁄25
6 6 3 6 4 4 3 3 4 4 3 3166931 166934 166940 166945 166950 166955 166960 166963 166968 166973 1669784.8 : 1 18 : 1 66 : 1 123 : 1 295 : 1 531 : 1 913 : 1 1414 : 1 2189 : 1 3052 : 1 5247 : 1
24⁄5 624⁄3516224⁄245
6877⁄56101062 ⁄343
331776⁄62536501⁄40
2425488⁄1715536406⁄245
1907712 ⁄625839523⁄160
4 4 4 3 3 4 3 3 3 3 3166932 166935 166941 166946 166951 166956 166961 166964 166969 166974 1669795.8 : 1 21 : 1 79 : 1 132 : 1 318 : 1 589 : 1 1093 : 1 1526 : 1 2362 : 1 3389 : 1 6285 : 1
23⁄4 299⁄143887⁄49
3312 ⁄25389376⁄1225
20631⁄35279841⁄256
9345024⁄61252066688⁄875
474513⁄1406436343⁄1024
3 3 3 3 4 3 3 4 3 3 3166936 166942 166947 166952 166957 166965 166970 166975
23 : 1 86 : 1 159 : 1 411 : 1 636 : 1 1694 : 1 2548 : 1 3656 : 1576⁄25
14976⁄1751587⁄10
359424⁄87579488⁄125
1162213⁄6867962624⁄3125
457056⁄125
4 4 3 4 3 3 4 3166937 166943 166948 166953 166958 166966 166971 166976
28 : 1 103 : 1 190 : 1 456 : 1 706 : 1 1828 : 1 2623 : 1 4060 : 1138⁄5 3588⁄35
12167⁄6489401⁄196
158171⁄2242238912 ⁄1225
2056223⁄ 7843637933⁄896
3 3 3 3 3 3 3 31 2 2 3 3 4 4 4 5 5 5 51 3 3 6 6 6 6 6 6 6 6 6
1.25 3.75 3.75 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.580 75 75 70 70 60 60 60 50 50 50 50118 162 162 194 194 226 226 226 258 258 258 2580.7 0.8 0.8 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.01.5 0.8 0.8 0.7 0.7 0.7 0.7 0.7 0.7 0.7 0.7 0.7
26.5 36.4 36.4 43.1 43.1 49.8 49.8 49.8 56.5 56.5 56.5 56.5
M 1:2
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
Ausgabe März 2015 / Änderungen vorbehalten maxon gear
Gesamtlänge Gesamtlänge
maxon Baukastensystem
+ Motor Seite + Sensor/Bremse Seite Gesamtlänge [mm] = Motorlänge + Getriebelänge + (Sensor/Bremse) + Montageteile
Technische Daten
Planetengetriebe geradeverzahntAbtriebswelle rostfreier Stahl Wellendurchmesser als Option 8 mmAbtriebswellenlagerung KugellagerRadialspiel, 5 mm ab Flansch max. 0.14 mmAxialspiel max. 0.4 mmMax. axiale Belastung (dynamisch) 120 NMax. axiale Aufpresskraft 120 NDrehsinn, Antrieb zu Abtrieb =Max. Eingangsdrehzahl dauernd 8000 min-1
Empfohlener Temperaturbereich -40…+100°CStufenzahl 1 2 3 4 5Max. radiale Belastung, 10 mm ab Flansch 90 N 140 N 200 N 220 N 220 N
Option: Geräuschreduzierte Ausführung
Planetengetriebe GP 32 C ∅32 mm, 1.0–6.0 NmKeramikversion
Artikelnummern
Getriebedaten
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm 4 Stufenzahl 5 Max. Dauerdrehmoment Nm 6 Kurzzeitig zulässiges Drehmoment Nm 7 Max. Wirkungsgrad % 8 Gewicht g 9 Mittleres Getriebespiel unbelastet ° 10 Massenträgheitsmoment gcm2
11 Getriebelänge L1 mm
maxo
n g
ear
308
RE-max 29 183-186 71.3 81.2 81.2 87.9 87.9 94.6 94.6 94.6 101.3 101.3 101.3 101.3RE-max 29 184/186 MR 355 80.1 90.0 90.0 96.7 96.7 103.4 103.4 103.4 110.1 110.1 110.1 110.1EC 32, 80 W 214 86.6 96.5 96.5 103.2 103.2 109.9 109.9 109.9 116.6 116.6 116.6 116.6EC 32, 80 W 214 HED_ 5540 363/366 105.0 114.9 114.9 121.6 121.6 128.3 128.3 128.3 135.0 135.0 135.0 135.0EC 32, 80 W 214 Res 26 374 106.7 116.6 116.6 123.3 123.3 130.0 130.0 130.0 136.7 136.7 136.7 136.7EC-max 22, 25 W 225 75.1 85.0 85.0 91.7 91.7 98.4 98.4 98.4 105.1 105.1 105.1 105.1EC-max 22, 25 W 225 MR 354 84.8 94.7 94.7 101.4 101.4 108.1 108.1 108.1 114.8 114.8 114.8 114.8EC-max 22, 25 W 225 AB 20 406 110.7 120.5 120.5 127.2 127.2 133.9 133.9 133.9 140.6 140.6 140.6 140.6EC-max 30, 40 W 226 68.9 78.8 78.8 85.5 85.5 92.2 92.2 92.2 98.9 98.9 98.9 98.9EC-max 30, 40 W 226 MR 355 81.1 91.0 91.0 97.7 97.7 104.4 104.4 104.4 111.1 111.1 111.1 111.1EC-max 30, 40 W 226 HEDL 5540 365 89.5 99.4 99.4 106.1 106.1 112.8 112.8 112.8 119.5 119.5 119.5 119.5EC-max 30, 40 W 226 AB 20 406 104.5 114.4 114.4 121.1 121.1 127.8 127.8 127.8 134.5 134.5 134.5 134.5EC-max 30, 40 W 226 HEDL 5540/AB 20 366/406 125.1 135.0 135.0 141.7 141.7 148.4 148.4 148.4 155.1 155.1 155.1 155.1EC-max 30, 60 W 227 90.9 100.8 100.8 107.4 107.4 114.7 114.7 114.7 120.8 120.8 120.8 120.8EC-max 30, 60 W 227 MR 355 103.1 113.0 113.0 119.7 119.7 126.4 126.4 126.4 133.1 133.1 133.1 133.1EC-max 30, 60 W 227 HEDL 5540 366 111.5 121.4 121.4 128.0 128.0 134.7 134.7 134.7 141.4 141.4 141.4 141.4EC-max 30, 60 W 227 AB 20 406 126.5 136.4 136.4 143.0 143.0 149.7 149.7 149.7 156.4 156.4 156.4 156.4EC-max 30, 60 W 227 HEDL 5540/AB 20 366/406 147.9 157.2 157.2 163.8 163.8 170.5 170.5 170.5 177.2 177.2 177.2 177.2EC-4pole 22, 90 W 233 75.2 85.1 85.1 91.8 91.8 98.5 98.5 98.5 105.2 105.2 105.2 105.2EC-4pole 22, 90 W 233 HEDL 5540 367 96.7 106.6 106.6 113.3 113.3 120.0 120.0 120.0 126.7 126.7 126.7 126.7EC-4pole 22, 120 W 234 92.6 102.5 102.5 109.2 109.2 115.9 115.9 115.9 122.6 122.6 122.6 122.6EC-4pole 22, 120 W 234 HEDL 5540 367 114.1 124.0 124.0 130.7 130.7 137.4 137.4 137.4 144.1 144.1 144.1 144.1EC 32 flat, 15 W 258 44.5 54.4 54.4 61.1 61.1 67.8 67.8 67.8 74.5 74.5 74.5 74.5EC 32 flat IE, IP 00 259 54.6 64.5 64.5 71.2 71.2 77.9 77.9 77.9 84.6 84.6 84.6 84.6EC 32 flat IE, IP 40 259 56.3 66.2 66.2 72.9 72.9 79.6 79.6 79.6 86.3 86.3 86.3 86.3EC-i 40, 50 W 243 58.3 68.2 68.2 74.9 74.9 81.6 81.6 81.6 88.3 88.3 88.3 88.3EC-i 40, 50 W 243 16 EASY 345/346 70.0 79.9 79.9 86.6 86.6 93.3 93.3 93.3 100.0 100.0 100.0 100.0EC-i 40, 50 W 243 HEDL 5540 367 81.3 91.2 91.2 97.9 97.9 104.6 104.6 104.6 111.3 111.3 111.3 111.3EC-i 40, 70 W 245 68.3 78.2 78.2 84.9 84.9 91.6 91.6 91.6 98.3 98.3 98.3 98.3EC-i 40, 70 W 245 16 EASY 345/346 80.0 89.9 89.9 96.6 96.6 103.3 103.3 103.3 110.0 110.0 110.0 110.0EC-i 40, 70 W 245 HEDL 5540 366 91.3 101.2 101.2 107.9 107.9 114.6 114.6 114.6 121.3 121.3 121.3 121.3MCD EPOS, 60 W 403 150.2 160.1 160.1 166.8 166.8 173.5 173.5 173.5 180.2 180.2 180.2 180.2MCD EPOS P, 60 W 403 150.2 160.1 160.1 166.8 166.8 173.5 173.5 173.5 180.2 180.2 180.2 180.2
166930 166933 166938 166939 166944 166949 166954 166959 166962 166967 166972 166977
3.7 : 1 14 : 1 33 : 1 51 : 1 111 : 1 246 : 1 492 : 1 762 : 1 1181 : 1 1972 : 1 2829 : 1 4380 : 126⁄ 7
676⁄49529⁄16
17576⁄34313824⁄125
421824⁄171586112 ⁄175
19044⁄2510123776⁄8575
8626176⁄4375495144⁄175
109503⁄25
6 6 3 6 4 4 3 3 4 4 3 3166931 166934 166940 166945 166950 166955 166960 166963 166968 166973 1669784.8 : 1 18 : 1 66 : 1 123 : 1 295 : 1 531 : 1 913 : 1 1414 : 1 2189 : 1 3052 : 1 5247 : 1
24⁄5 624⁄3516224⁄245
6877⁄56101062 ⁄343
331776⁄62536501⁄40
2425488⁄1715536406⁄245
1907712 ⁄625839523⁄160
4 4 4 3 3 4 3 3 3 3 3166932 166935 166941 166946 166951 166956 166961 166964 166969 166974 1669795.8 : 1 21 : 1 79 : 1 132 : 1 318 : 1 589 : 1 1093 : 1 1526 : 1 2362 : 1 3389 : 1 6285 : 1
23⁄4 299⁄143887⁄49
3312 ⁄25389376⁄1225
20631⁄35279841⁄256
9345024⁄61252066688⁄875
474513⁄1406436343⁄1024
3 3 3 3 4 3 3 4 3 3 3166936 166942 166947 166952 166957 166965 166970 166975
23 : 1 86 : 1 159 : 1 411 : 1 636 : 1 1694 : 1 2548 : 1 3656 : 1576⁄25
14976⁄1751587⁄10
359424⁄87579488⁄125
1162213⁄6867962624⁄3125
457056⁄125
4 4 3 4 3 3 4 3166937 166943 166948 166953 166958 166966 166971 166976
28 : 1 103 : 1 190 : 1 456 : 1 706 : 1 1828 : 1 2623 : 1 4060 : 1138⁄5 3588⁄35
12167⁄6489401⁄196
158171⁄2242238912 ⁄1225
2056223⁄ 7843637933⁄896
3 3 3 3 3 3 3 31 2 2 3 3 4 4 4 5 5 5 51 3 3 6 6 6 6 6 6 6 6 6
1.25 3.75 3.75 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.580 75 75 70 70 60 60 60 50 50 50 50118 162 162 194 194 226 226 226 258 258 258 2580.7 0.8 0.8 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.01.5 0.8 0.8 0.7 0.7 0.7 0.7 0.7 0.7 0.7 0.7 0.7
26.5 36.4 36.4 43.1 43.1 49.8 49.8 49.8 56.5 56.5 56.5 56.5
M 1:2
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
maxon gear Ausgabe März 2015 / Änderungen vorbehalten
Gesamtlänge Gesamtlänge
Gesamtlänge Gesamtlänge
maxon Baukastensystem
+ Motor Seite + Sensor/Bremse Seite Gesamtlänge [mm] = Motorlänge + Getriebelänge + (Sensor/Bremse) + Montageteile
Technische Daten
Planetengetriebe geradeverzahntAbtriebswelle rostfreier Stahl Wellendurchmesser als Option 8 mmAbtriebswellenlagerung KugellagerRadialspiel, 5 mm ab Flansch max. 0.14 mmAxialspiel max. 0.4 mmMax. axiale Belastung (dynamisch) 120 NMax. axiale Aufpresskraft 120 NDrehsinn, Antrieb zu Abtrieb =Max. Eingangsdrehzahl dauernd 8000 min-1
Empfohlener Temperaturbereich -40…+100°CStufenzahl 1 2 3 4 5Max. radiale Belastung, 10 mm ab Flansch 90 N 140 N 200 N 220 N 220 N
Option: Geräuschreduzierte Ausführung
Planetengetriebe GP 32 C ∅32 mm, 1.0–6.0 NmKeramikversion
Artikelnummern
Getriebedaten
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm 4 Stufenzahl 5 Max. Dauerdrehmoment Nm 6 Kurzzeitig zulässiges Drehmoment Nm 7 Max. Wirkungsgrad % 8 Gewicht g 9 Mittleres Getriebespiel unbelastet ° 10 Massenträgheitsmoment gcm2
11 Getriebelänge L1 mm

310 ®
L2
L
d D
615 405 00 5 16 11 13,5 6 2 150 55 M2,5 x 10 1,2 3 0,012615 406 00 6 16 11 13,5 9 3 188 69 M2,5 x 10 1,2 3 0,012615 406 35 6,35 16 11 13,5 10 3 180 72 M2,5 x 10 1,2 3 0,012615 407 00 7 17 11 13,5 11 3 155 64 M2,5 x 10 1,2 3 0,013615 408 00 8 18 11 13,5 12 3 141 62 M2,5 x 10 1,2 3 0,015615 409 00 9 20 13 15,5 17 4 132 60 M2,5 x 12 1,2 4 0,020615 409 53 9,53 20 13 15,5 18 4 124 59 M2,5 x 12 1,2 4 0,020615 410 00 10 20 13 15,5 19 4 120 60 M2,5 x 12 1,2 4 0,019615 411 00 11 22 13 15,5 21 4 108 54 M2,5 x 12 1,2 4 0,024615 412 00 12 22 13 15,5 24 4 102 55 M2,5 x 12 1,2 4 0,022615 414 00 14 26 17 20 40 6 94 50 M3 x 16 2,1 4 0,039615 415 00 15 28 17 20 44 6 93 50 M3 x 16 2,1 4 0,044615 416 00 16 32 17 21 86 10 158 79 M4 x 16 4,9 4 0,067615 417 00 17 35 21 25 88 10 116 56 M4 x 20 4,9 4 0,090615 418 00 18 35 21 25 94 11 110 57 M4 x 20 4,9 4 0,087615 419 00 19 35 21 25 99 11 104 56 M4 x 20 4,9 4 0,083615 420 00 20 38 21 26 179 17 169 89 M5 x 20 10 4 0,10615 422 00 22 40 21 26 187 18 146 80 M5 x 20 10 4 0,11615 424 00 24 47 26 32 290 24 155 79 M6 x 25 17 4 0,20615 425 00 25 47 26 32 300 24 147 78 M6 x 25 17 4 0,19615 425 40 25,4 47 26 32 310 24 145 79 M6 x 25 17 4 0,18615 428 00 28 50 26 32 480 34 186 105 M6 x 25 17 6 0,22615 430 00 30 55 26 32 510 34 174 95 M6 x 25 17 6 0,27615 432 00 32 55 26 32 600 38 181 105 M6 x 25 17 6 0,25615 435 00 35 60 31 37 820 47 172 100 M6 x 30 17 8 0,36615 438 00 38 65 31 37 880 47 157 92 M6 x 30 17 8 0,43615 440 00 40 65 31 37 1000 50 171 99 M6 x 30 17 8 0,40615 442 00 42 75 36 44 1410 67 177 99 M8 x 35 40 6 0,67615 445 00 45 75 36 44 1510 67 165 99 M8 x 35 40 6 0,63615 448 00 48 80 36 44 2150 86 206 123 M8 x 35 40 8 0,74615 450 00 50 80 36 44 2150 89 190 118 M8 x 35 40 8 0,70615 455 00 55 85 42 52 2772 110 270 174 M8 x 40 40 8 0,77615 460 00 60 90 42 52 3060 120 248 166 M8 x 40 40 8 0,82615 465 00 65 95 42 52 3645 120 253 174 M8 x 40 40 9 0,88615 470 00 70 110 48 58 5724 180 283 182 M10 x 45 80 8 1,59615 475 00 75 115 48 58 6210 180 268 129 M10 x 45 80 8 1,67615 480 00 80 120 54 65 6660 190 260 130 M10 x 50 80 8 1,76615 485 00 85 125 54 65 7560 190 273 123 M10 x 50 80 9 1,85615 490 00 90 130 58 70 8100 200 233 121 M10 x 55 80 9 1,94615 495 00 95 135 58 70 9900 230 271 140 M10 x 55 80 10 2,02615 500 00 100 145 58 70 11790 260 265 186 M12 x 55 145 8 2,90
Spannsätze BAR
Werkstoff: 11SMnPb37.• Zur Befestigung einer Nabe (z.B. Antriebsrad, Rotor oder ähnliches) auf einer Welle.
• Für mittlere Drehmomente.
• Besonders günstige Verteilung der Flächenpressung.
• Sehr gute Selbstzentrierung.
• Selbstlösend bei Demontage.
• Auch für grobe Passungen geeignet.
• Geringfügige axiale Verschiebung bei der Montage möglich.
Bestellangaben: z.B.: Art.-Nr. 615 405 00, Spannsatz BAR 5 mm
Passungen, Oberfläche
Welle und Nabe bis Qualität h8/H8.Rautiefe für Welle und Nabe < 12,5µm.
Montage
Der Spannsatz muss mindestens um das Maß „L“ in der Bohrung sitzen. Spannsatz leicht geölt einbauen, kein MoS2 oder Fett verwenden. Schrauben gegenüberliegend 180º versetzt in mehreren Stufen auf Anzugsdrehmoment TA anziehen.
Bei TA Flächenpressung Spannschrauben 12.9 übertragbar an Welle an Nabe Artikel-Nr. d D L L2 T Fax PW PN Größe TA Gewicht mm mm mm mm Nm kN N/mm2 N/mm2 DIN 12.9 Nm Anzahl kg
Demontage
Die Schrauben gegenüberliegend lösen. Schrauben in die frei-en Abdrückgewinde einschrauben und stufenweise über Kreuz anziehen, bis sich die Verbindung löst.
T = Übertragbares Drehmoment bei Fax = 0.Fax = Übertragbare Axialkraft bei T = 0.PW = Flächenpressung auf die Welle.PN = Flächenpressung auf die Nabe. TA = Anzugsdrehmoment der Schrauben.
Auswahltool und Nabenberechnung im Internet unter www.maedler.de im Bereich MÄDLER
®-Tools
Top Related