







Languages
Pages
Legal

• Es la parte de la mecánica que estudia el movimiento de los cuerpos sin considerar las causas que la producen.
• El movimiento es un cambio de posición en un determinado sistema de referencia, el cual generalmente se toma como fijo respecto al observador.
CINEMÁTICA
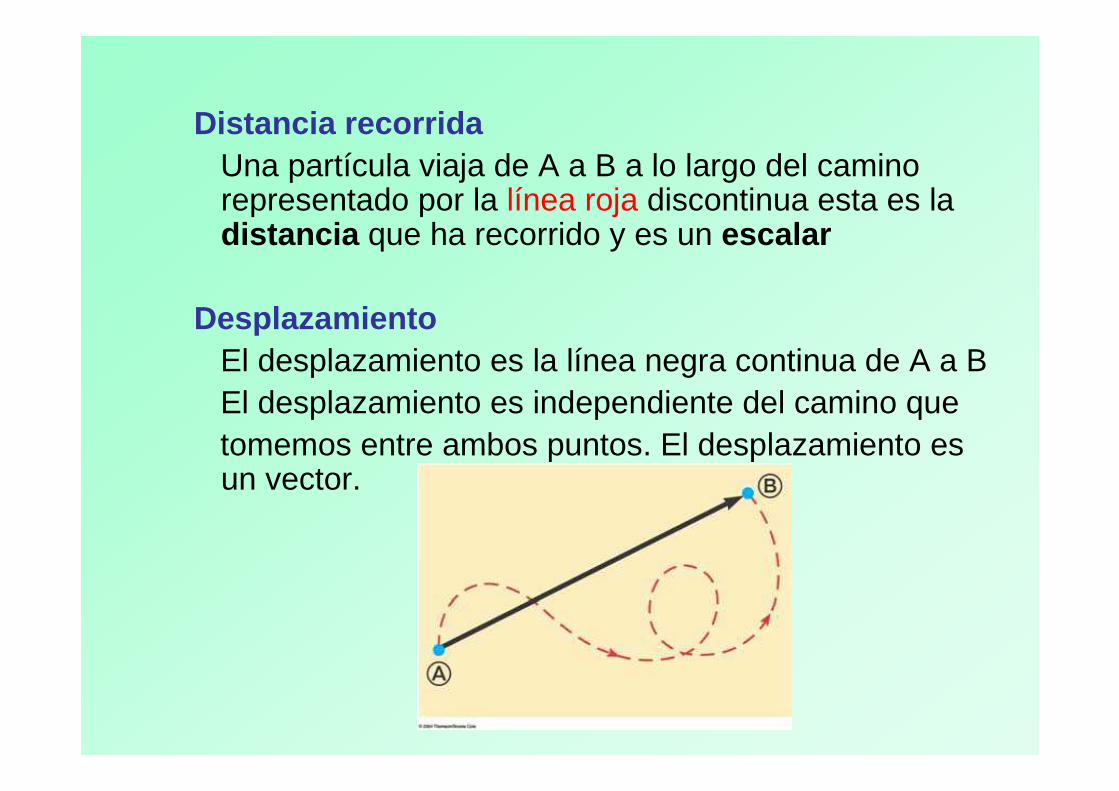
Distancia recorridaUna partícula viaja de A a B a lo largo del camino representado por la línea roja discontinua esta es la distancia que ha recorrido y es un escalar
DesplazamientoEl desplazamiento es la línea negra continua de A a BEl desplazamiento es independiente del camino quetomemos entre ambos puntos. El desplazamiento es un vector.
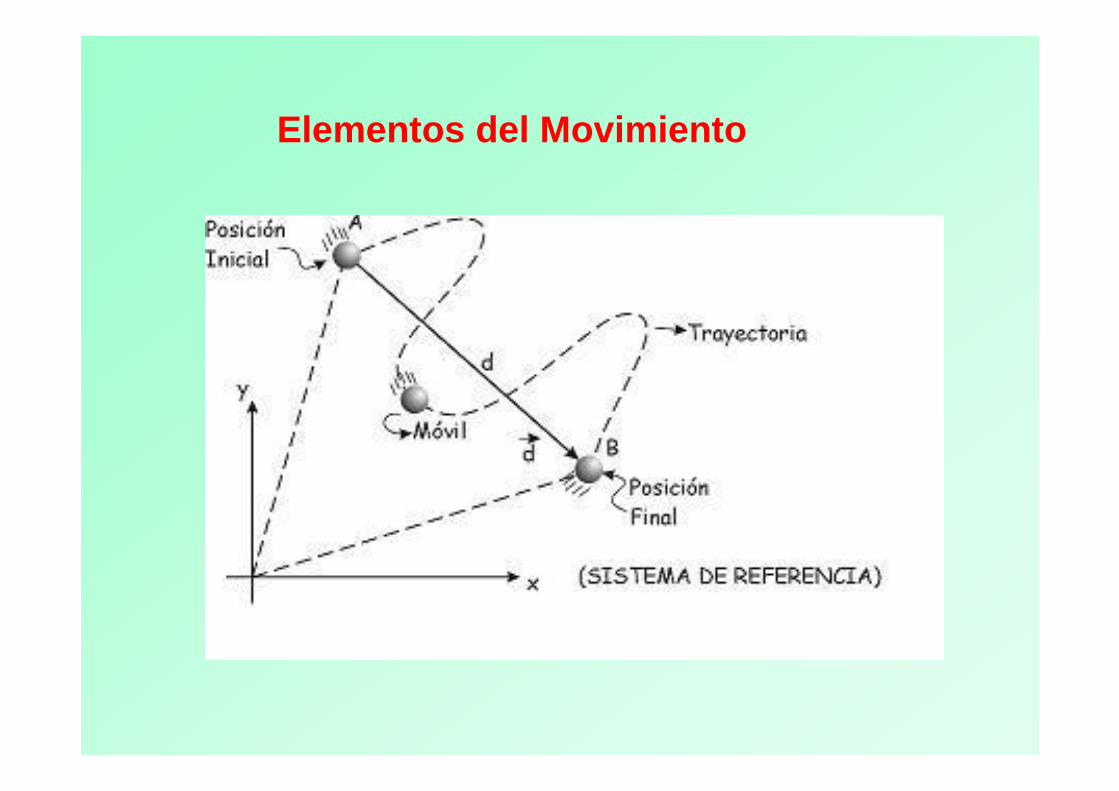
Elementos del Movimiento
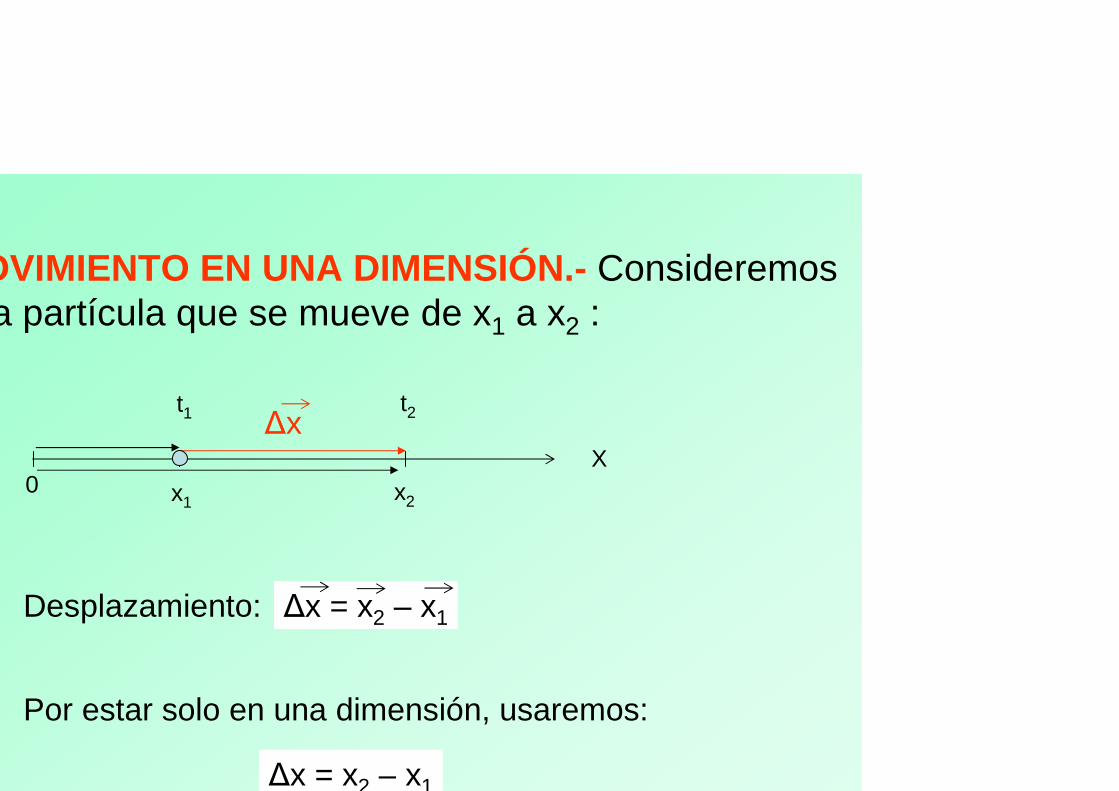
MOVIMIENTO EN UNA DIMENSIÓN.- Consideremos una partícula que se mueve de x1 a x2 :
X0 x1 x2
t1 t2
∆x = x2 – x1Desplazamiento:
∆x
Por estar solo en una dimensión, usaremos:
∆x = x2 – x1
Se define velocidad media (vm) como:
t
xvm ∆
∆=
12
12
tt
xx
t
xvm −
−=∆∆=
O también:
(En m/s)

Gráfico posición vs. tiempo.- Este tipo de gráfico nos da una información más detallada del movimiento.
t
X
t1 t2
vm es igual a la pendientede la recta entre dos puntos.
t
xvm ∆
∆=

Velocidad instantánea.- Está definida para un punto, se obtiene a partir de vm haciendo que ∆t tienda a cero:
dt
dx
t
xlímvt
=∆∆=
→∆ 0 dt
dxv =
La derivada es igual a laPendiente de la recta enun punto.
t
X
v1
v2=0
v <0

Movimiento uniforme.- Como la velocidad es constante, el gráfico x vs. t tiene pendiente constante :
x
t
t
xvv m ∆
∆==∆x
∆t Por lo tanto, la ecuacióndel M.R.U. es:
t
xv
∆∆=
Velocidad instantánea igual a velocidad media:
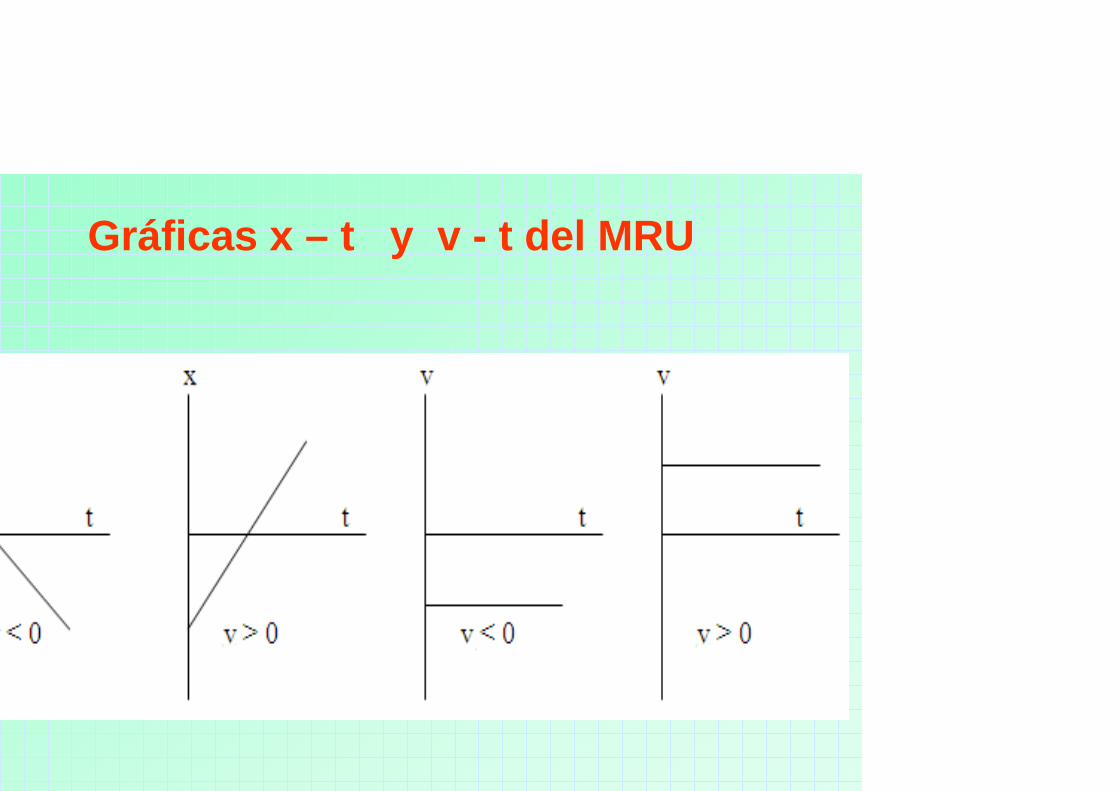
Gráficas x – t y v - t del MRU
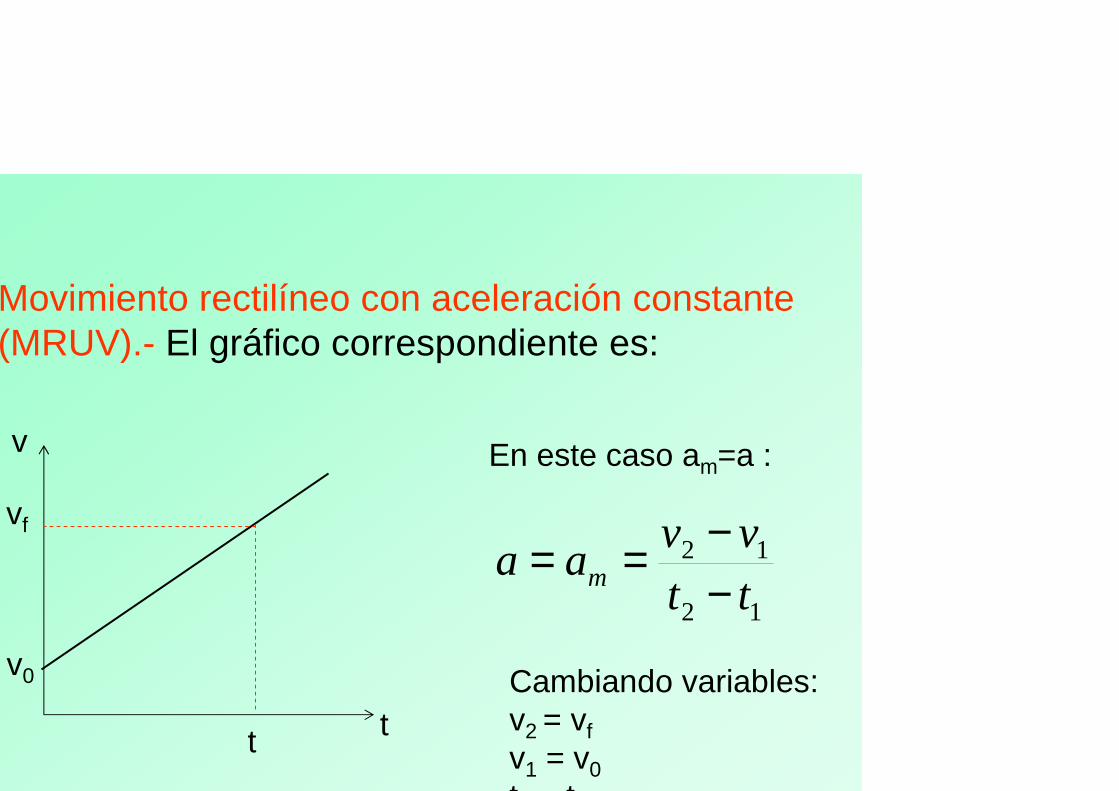
Movimiento rectilíneo con aceleración constante (MRUV).- El gráfico correspondiente es:
v
t
En este caso am=a :
12
12
tt
vvaa m −
−==
Cambiando variables:v2 = vfv1 = v0t = t
v0
vf
t

Ecuaciones del MRUV :
atvv f += 0
20 2
1attvx +=∆
xavv ∆+= 222

Aceleración media e instantánea.- Si la velocidad de un cuerpo cambia en el tiempo, el cuerpo tiene aceleración, se define aceleración media:
t
vam ∆
∆= En m/s 2
Se define aceleración instantánea:
dt
dv
t
vlíma
t=
∆∆=
→∆ 0
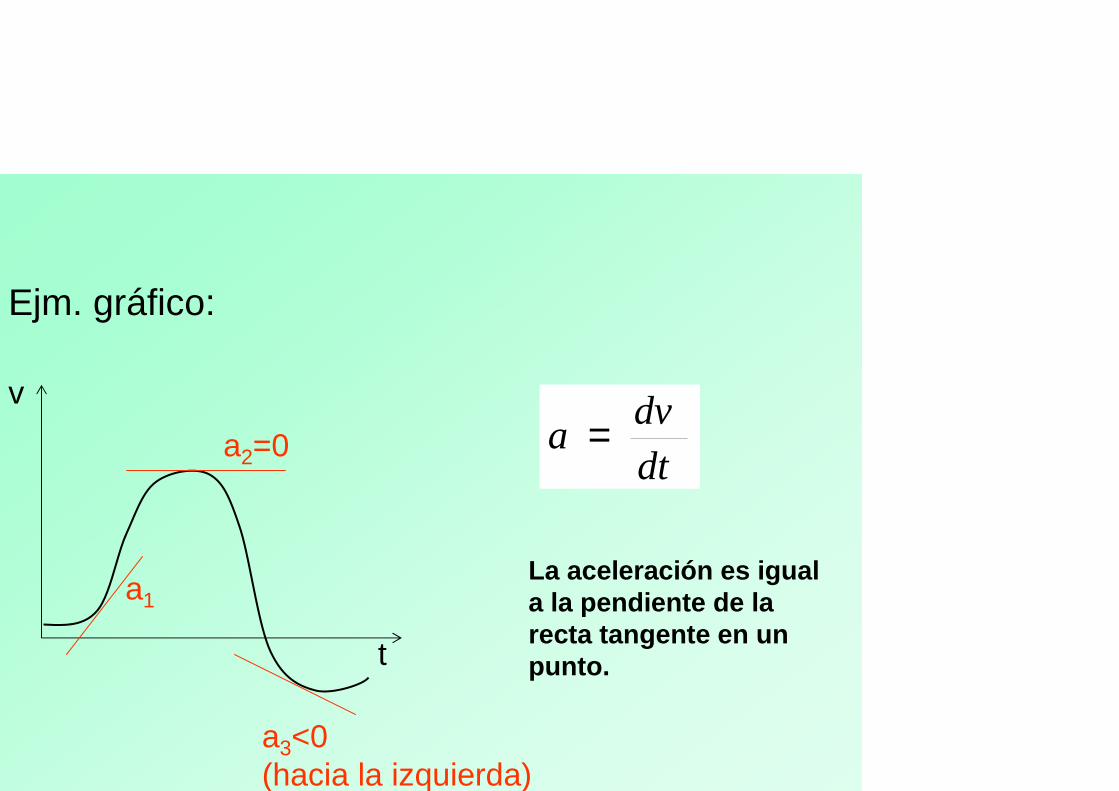
Ejm. gráfico:
v
t
dt
dva =
La aceleración es iguala la pendiente de larecta tangente en unpunto.
a1
a2=0
a3<0(hacia la izquierda)
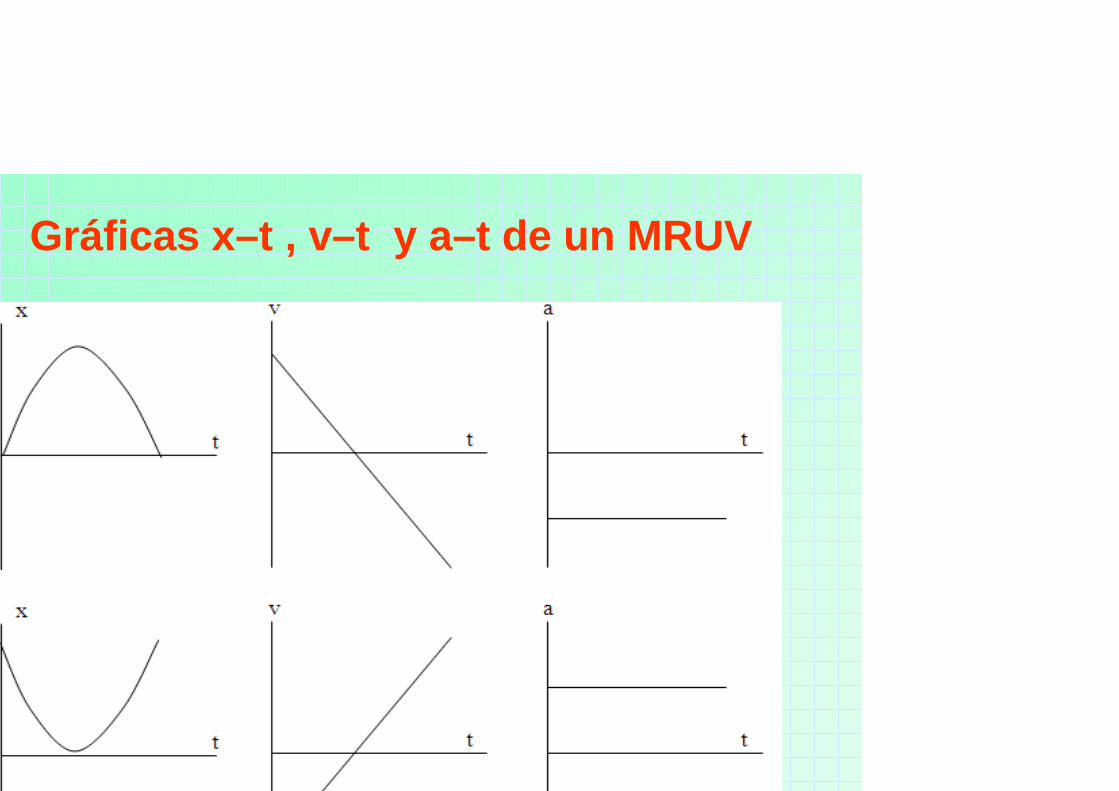
Gráficas x –t , v–t y a–t de un MRUV
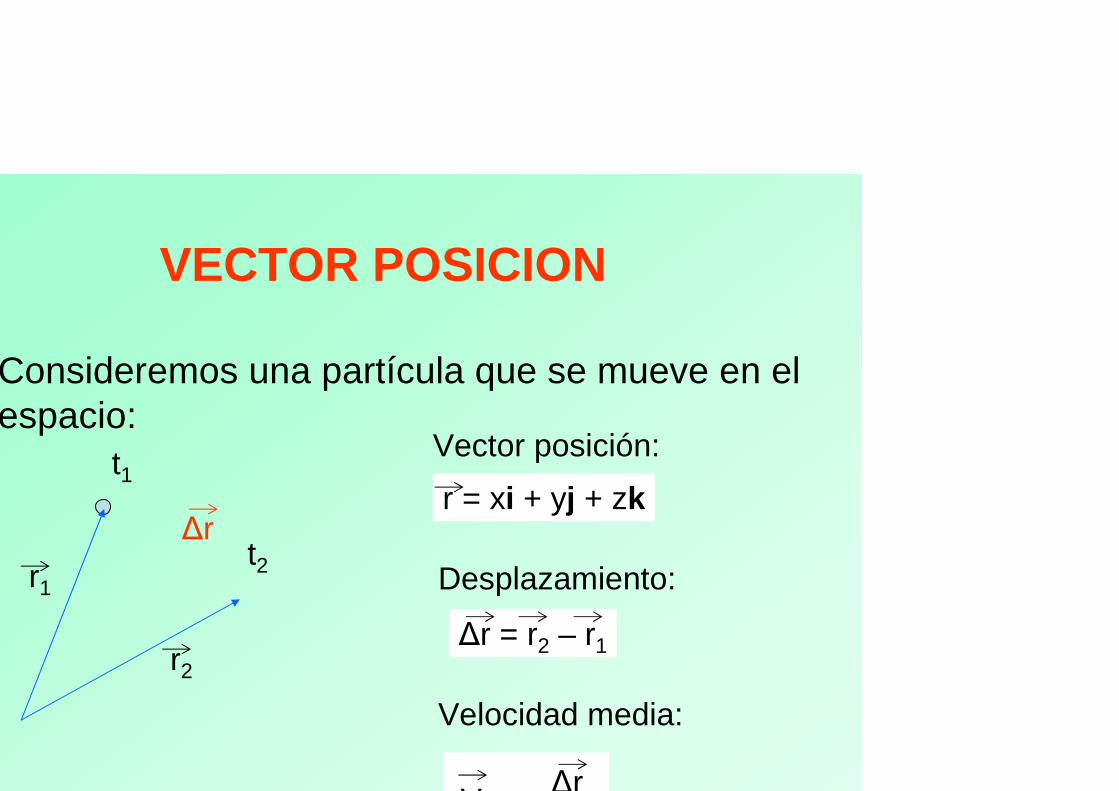
Consideremos una partícula que se mueve en el espacio:
VECTOR POSICION
t1
t2r1
r2
r = xi + yj + zk
Vector posición:
Desplazamiento:
∆r = r2 – r1
∆r
Velocidad media:
V = ----∆r
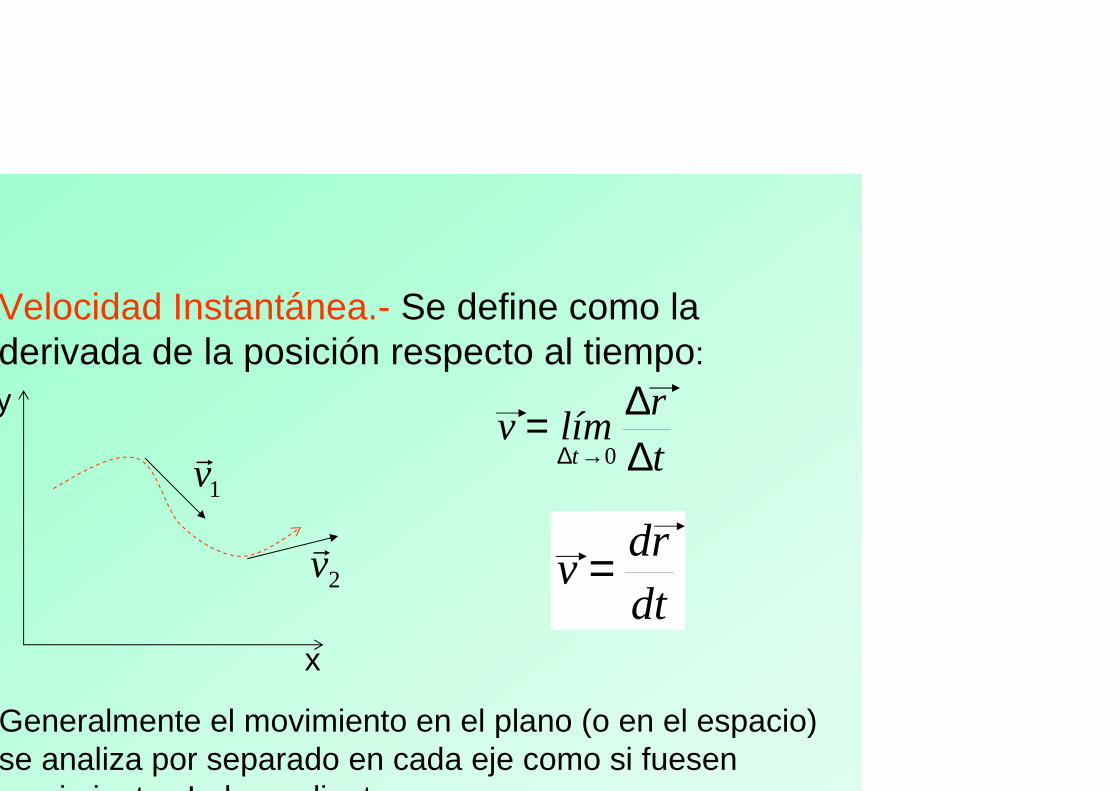
Velocidad Instantánea.- Se define como la derivada de la posición respecto al tiempo:
y
x
t
rlímvt ∆
∆=→∆ 0
dt
drv =
1v�
2v�
Generalmente el movimiento en el plano (o en el espacio)se analiza por separado en cada eje como si fuesenmovimientos Independientes.

Componentes de la velocidad en el plano.- Si se tiene la rapidez (módulo de la velocidad) y dirección:
v = vXi + vYj
vX = v cos θvY = v sen θ
=
X
Y1-tanv
vθ
| v | = v = √ (vX)2 + (vY)2
vX
Y
v
θ
Rapidez :
X
Y
i
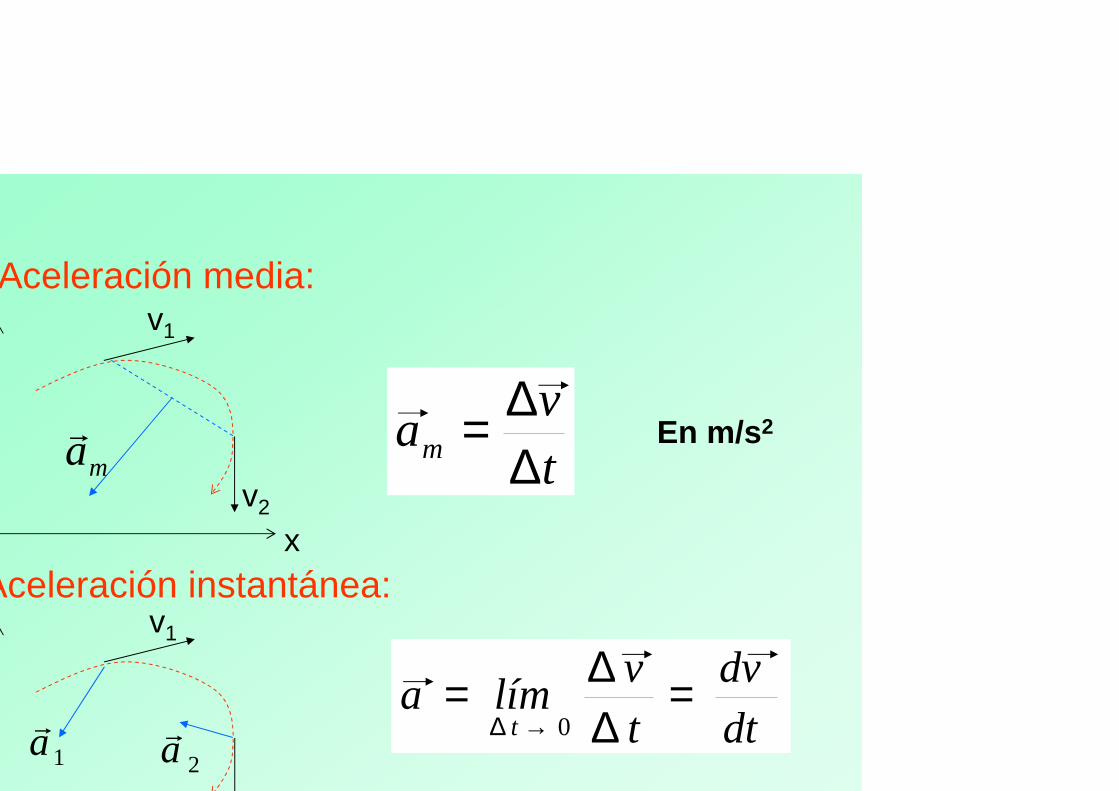
Aceleración media:
t
vam ∆
∆= En m/s 2
Aceleración instantánea:
dt
dv
t
vlíma
t=
∆∆=
→∆ 0
v1
v2
x
v1
v
ma�
1a�
2a�

EJERCICIO
• ¿Cuál de los siguientes gráficos describe mejor el movimiento de una partícula con velocidad positiva y aceleración negativa?
• Rpta: e

Caída libre
Movimiento Vertical No se toma en cuenta la
fricción del aire
Caso Particular del
MRUV
Aceleración de la gravedad
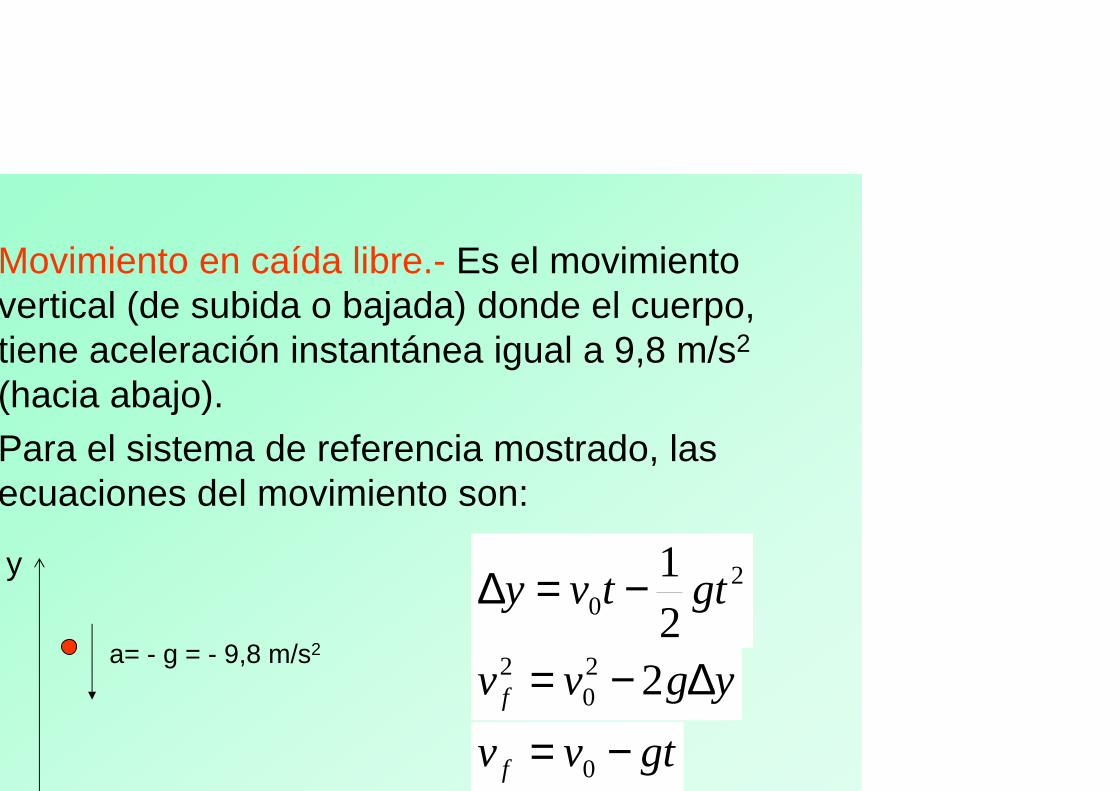
Movimiento en caída libre.- Es el movimiento vertical (de subida o bajada) donde el cuerpo, tiene aceleración instantánea igual a 9,8 m/s2
(hacia abajo).
Para el sistema de referencia mostrado, las ecuaciones del movimiento son:
gtvv f −= 0
20 2
1gttvy −=∆
ygvv f ∆−= 220
2
y
x
a= - g = - 9,8 m/s2

GRAFICAS DE CAIDA LIBRE
Características del caso III
� En la altura máxima la rapidez del objeto es cero
� El tiempo de subida es igual al tiempo de bajada
� Para una misma altura, la rapidez de subida es igual ala rapidez de bajada

Movimiento de proyectiles.- Es aquel en el que el cuerpo tiene una aceleración igual a la gravedad, y este describe una trayectoria parabólica:
v0X = v0 cosθ
v0
θ
X
Yv1Y
v0X
v1
v2v2Y= -v1Y
v3 = v0X
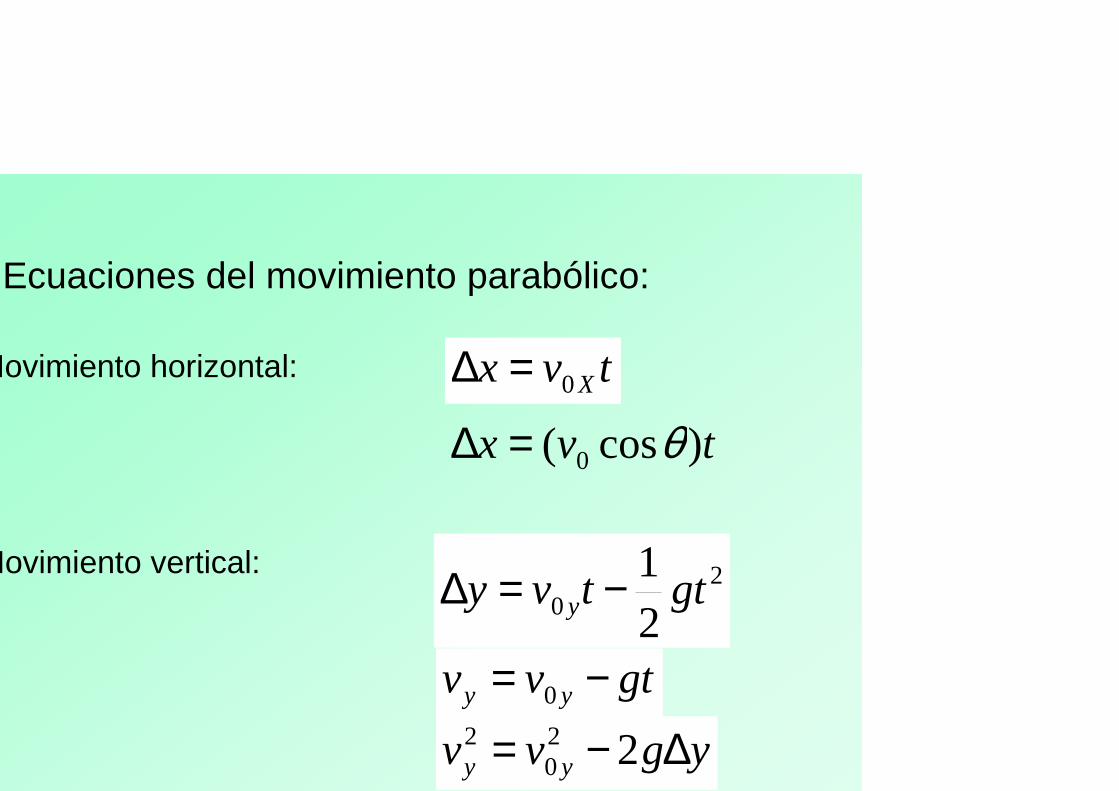
Ecuaciones del movimiento parabólico:
tvx X0=∆Movimiento horizontal:
tvx )cos( 0 θ=∆
Movimiento vertical:
gtvv yy −= 0
20 2
1gttvy y −=∆
ygvv yy ∆−= 220
2
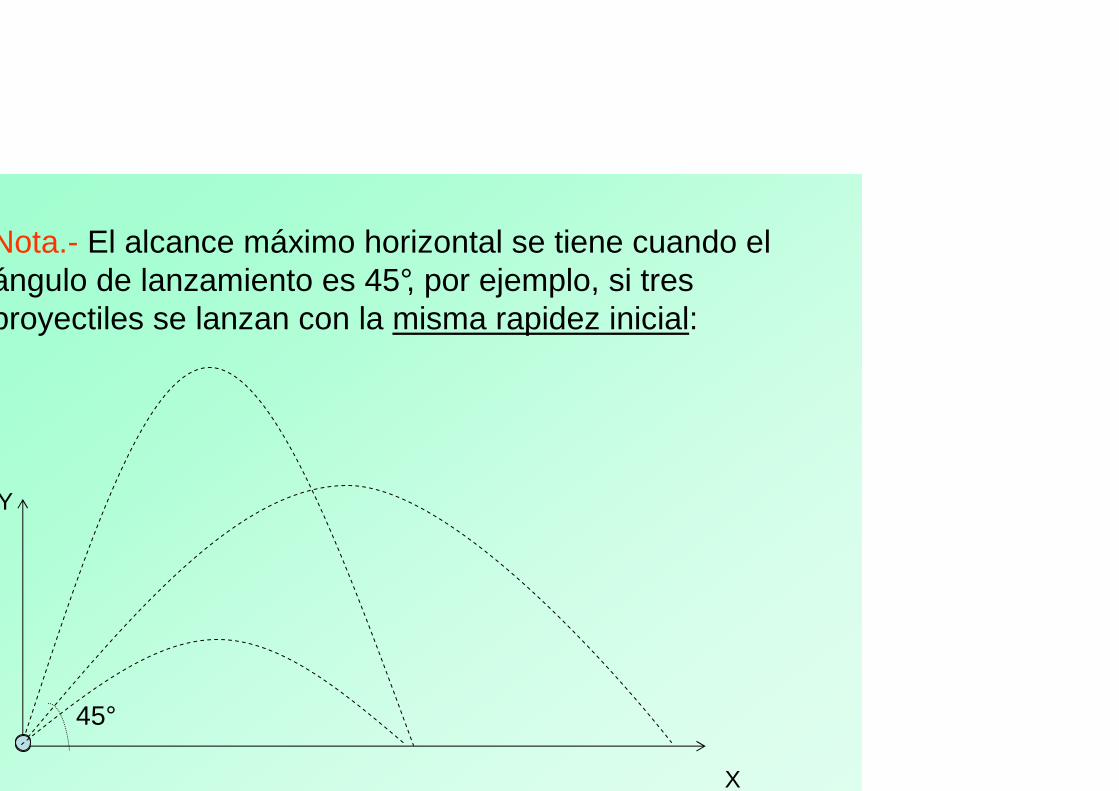
Nota.- El alcance máximo horizontal se tiene cuando el ángulo de lanzamiento es 45°, por ejemplo, si tres proyectiles se lanzan con la misma rapidez inicial:
45°
X
Y
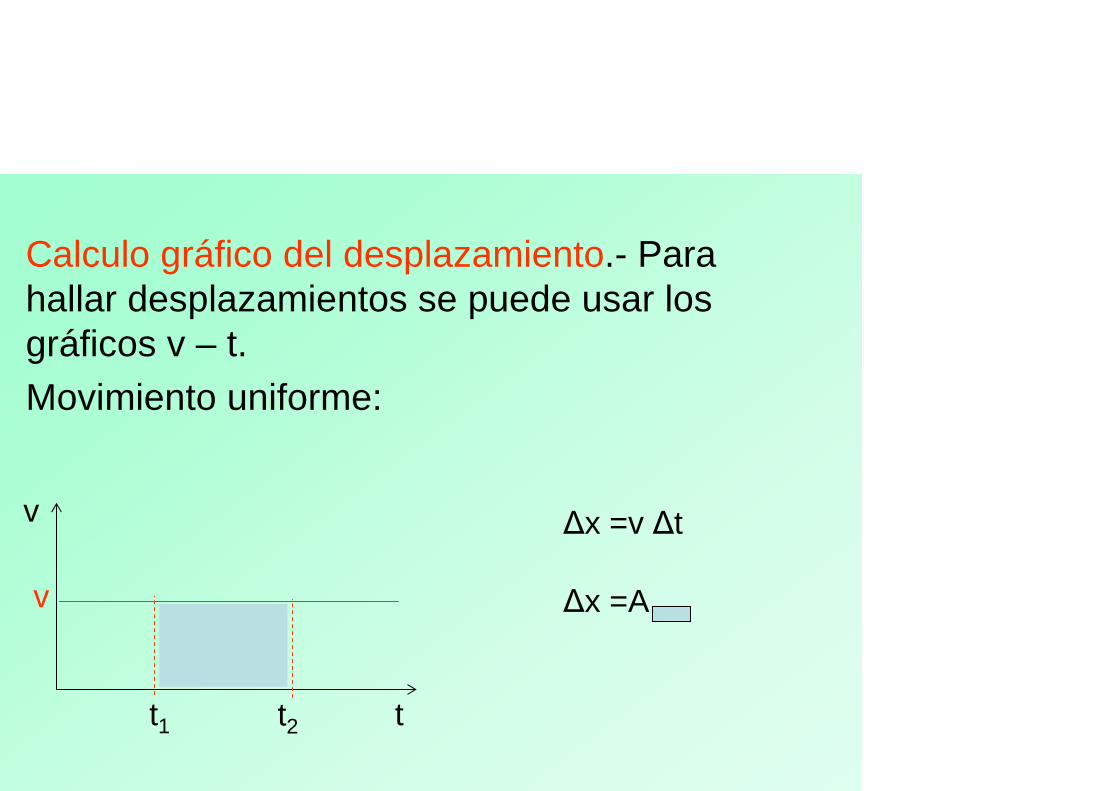
Calculo gráfico del desplazamiento.- Para hallar desplazamientos se puede usar los gráficos v – t.Movimiento uniforme:
v
t
v
∆x =v ∆t
∆x =A
t1 t2
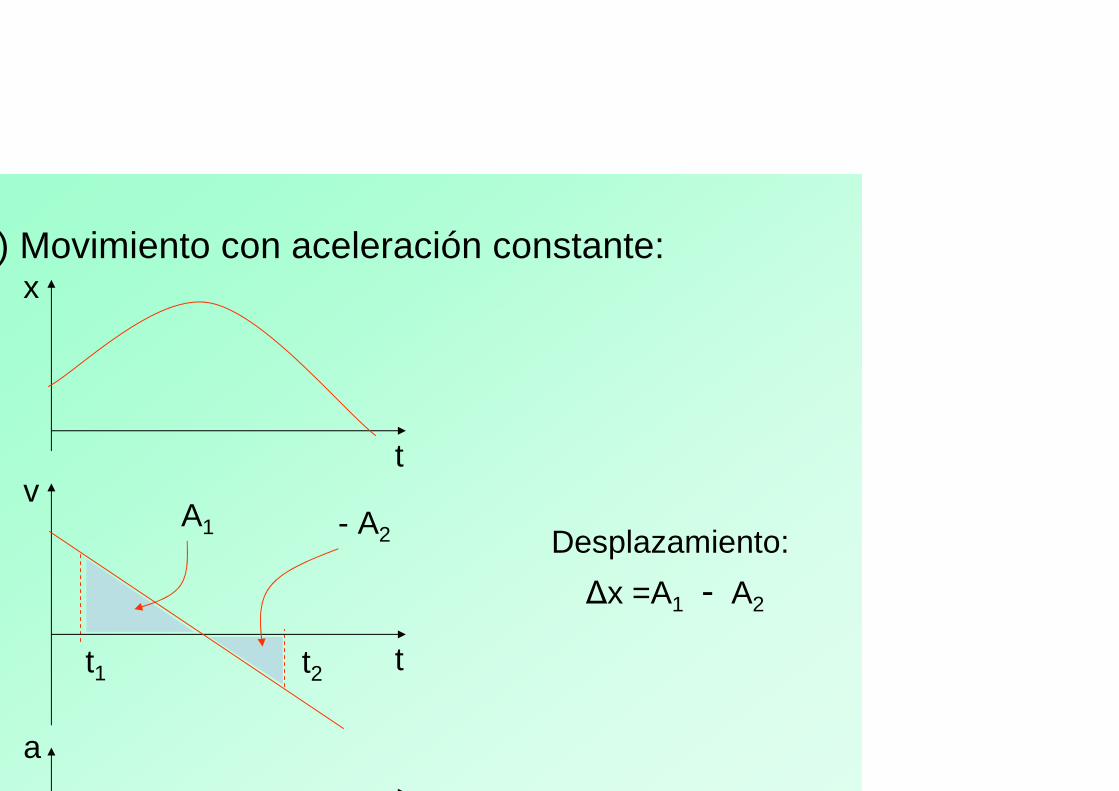
b) Movimiento con aceleración constante:
t1 t2
v
t
x
t
a
A1 - A2
∆x =A1 - A2
Desplazamiento:
Movimiento circular uniforme (M.C.U.)
• Movimiento en que un cuerpo gira equidistante a un punto fijo, describiendo ángulos iguales en tiempos iguales.

Período (T)
• Es el tiempo que tarda una partícula en dar una vuelta completa. Se mide en unidades de tiempo, nosotros lo mediremos en SEGUNDOS
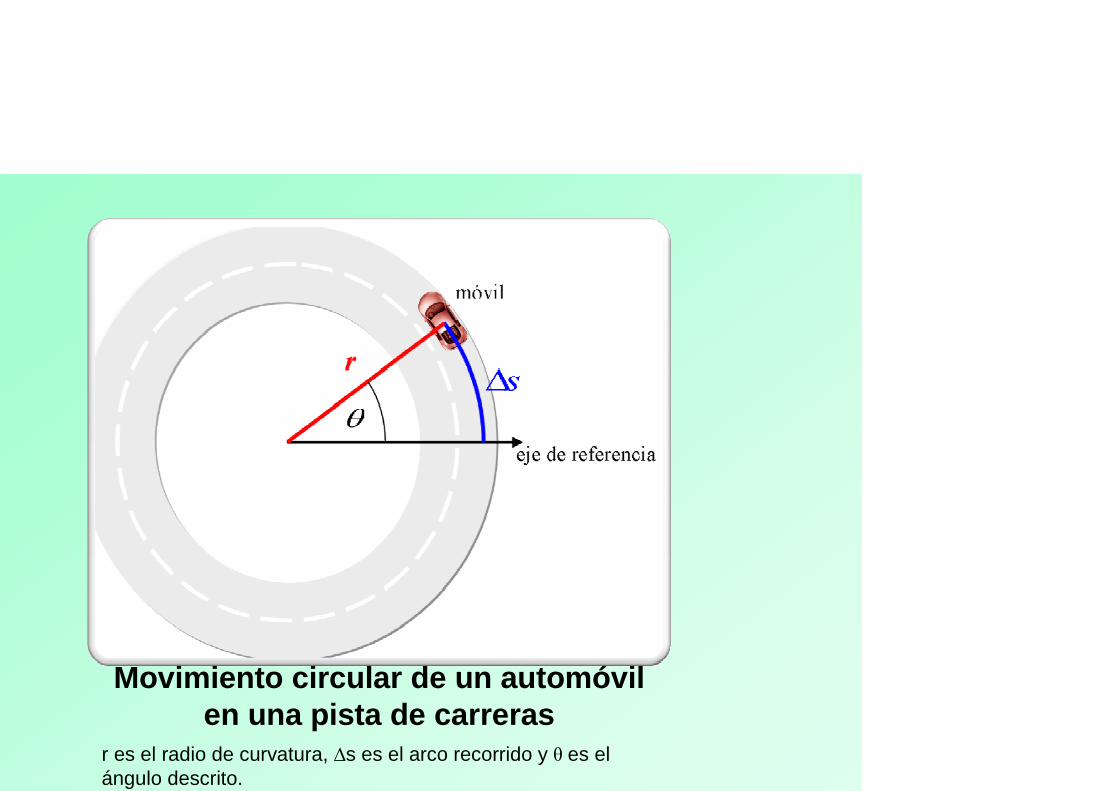
Movimiento circular de un autom óvil en una pista de carreras
r es el radio de curvatura, ∆s es el arco recorrido y θ es el ángulo descrito.
Frecuencia ( f )
Es el número de vueltas o revoluciones por unidad de tiempo. Matemáticamente se expresa:
tiempo
vueltasnºdef =

La unidad de frecuencia es :
Unidad de frecuencia
Tf
1=
11)( −===== s
segundo
oscilación
segundo
vibraciónrps
segundoHzHertz
Tf
1=
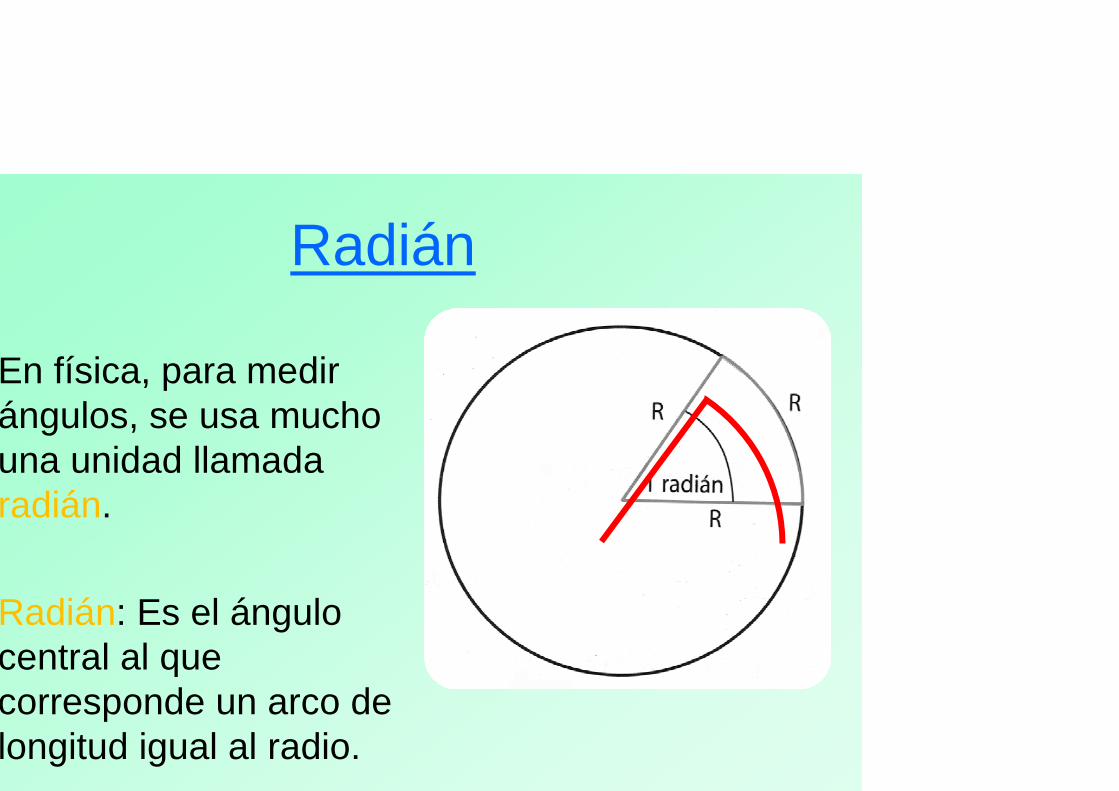
Radián
En física, para medir ángulos, se usa mucho una unidad llamada radián.
Radián: Es el ángulo central al que corresponde un arco de longitud igual al radio.

Equivalencia entre grados sexagesimales y radianes
radπ2
360
radianesen ángulo
gradosen ángulo °=
¿A cuántos grados equivale un ángulo de π/6 rad?
¿A cuántos radianes equivale un ángulo de 45°?
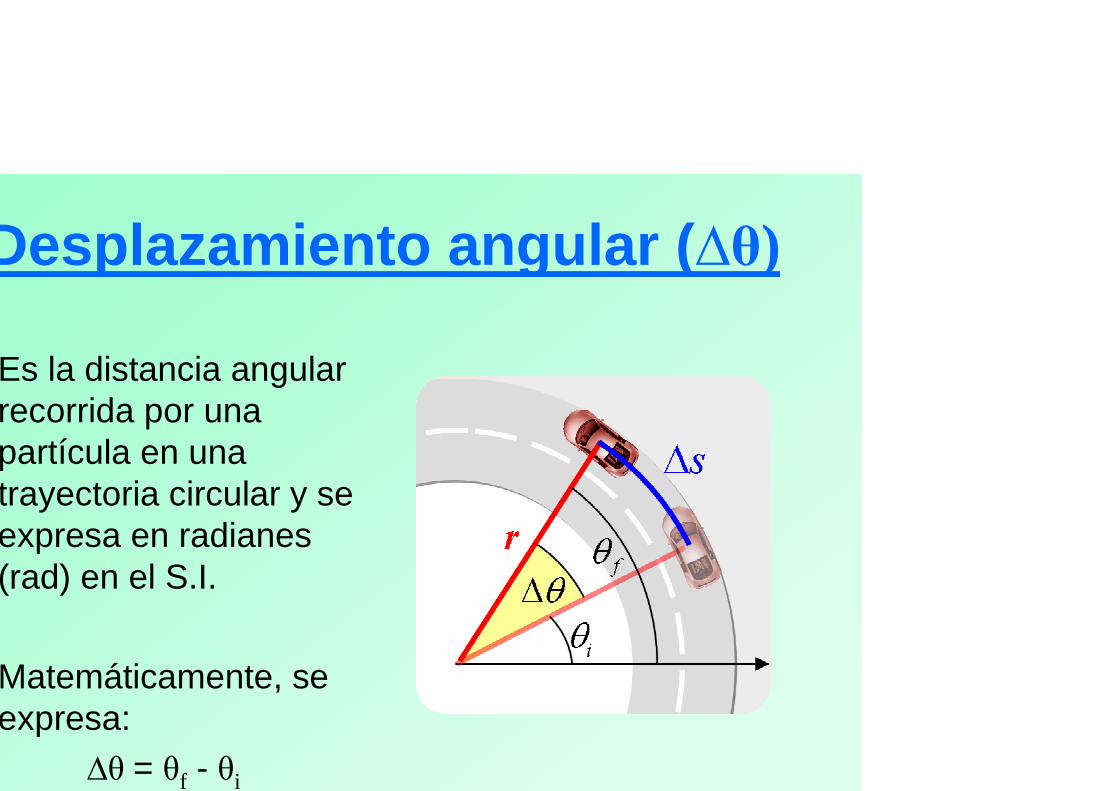
Desplazamiento angular ( ∆θ)
Es la distancia angular recorrida por una partícula en una trayectoria circular y se expresa en radianes (rad) en el S.I.
Matemáticamente, se expresa:
∆θ = θf - θi
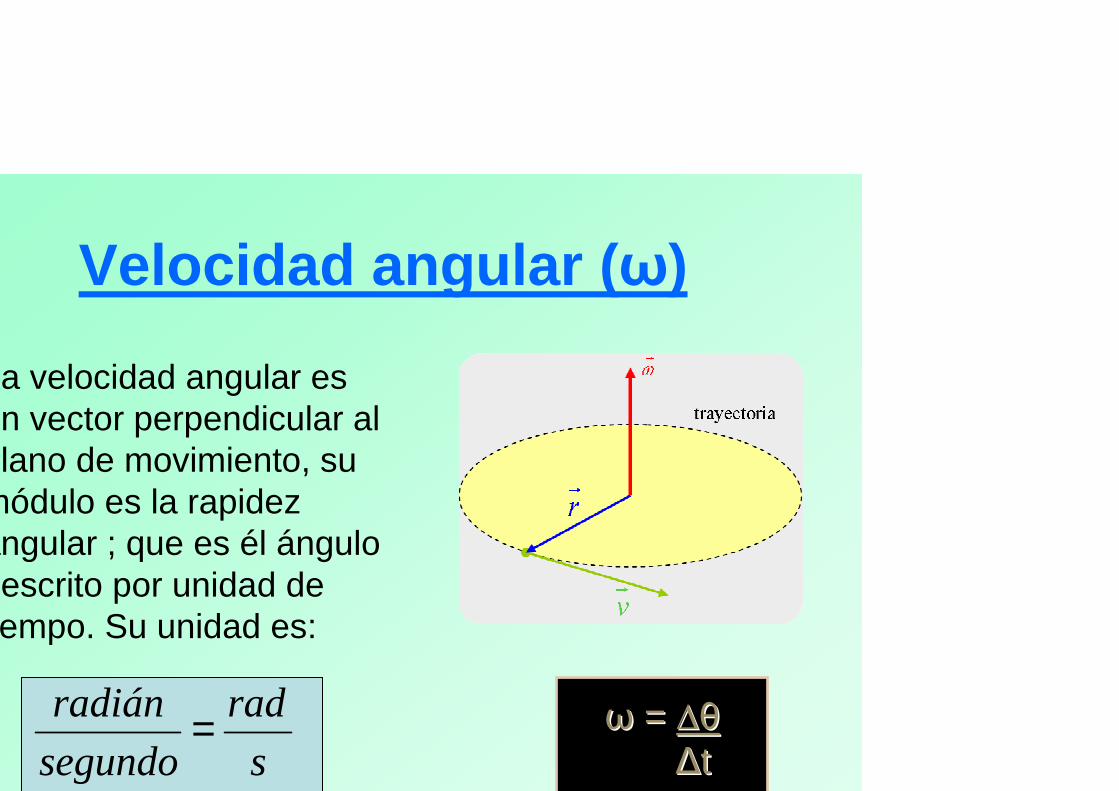
Velocidad angular ( ω)
La velocidad angular es un vector perpendicular al plano de movimiento, su módulo es la rapidez angular ; que es él ángulo descrito por unidad de tiempo. Su unidad es:
ωω = = ∆θ∆θ∆∆tts
rad
segundo
radián =

Velocidad tangencial (v)
Se define velocidad tangencial como el cociente entre el arco recorrido por la partícula y el tiempo empleado en cubrir dicha distancia. Su unidad es: m/s
RRfT
Rv ωππ === 2
2
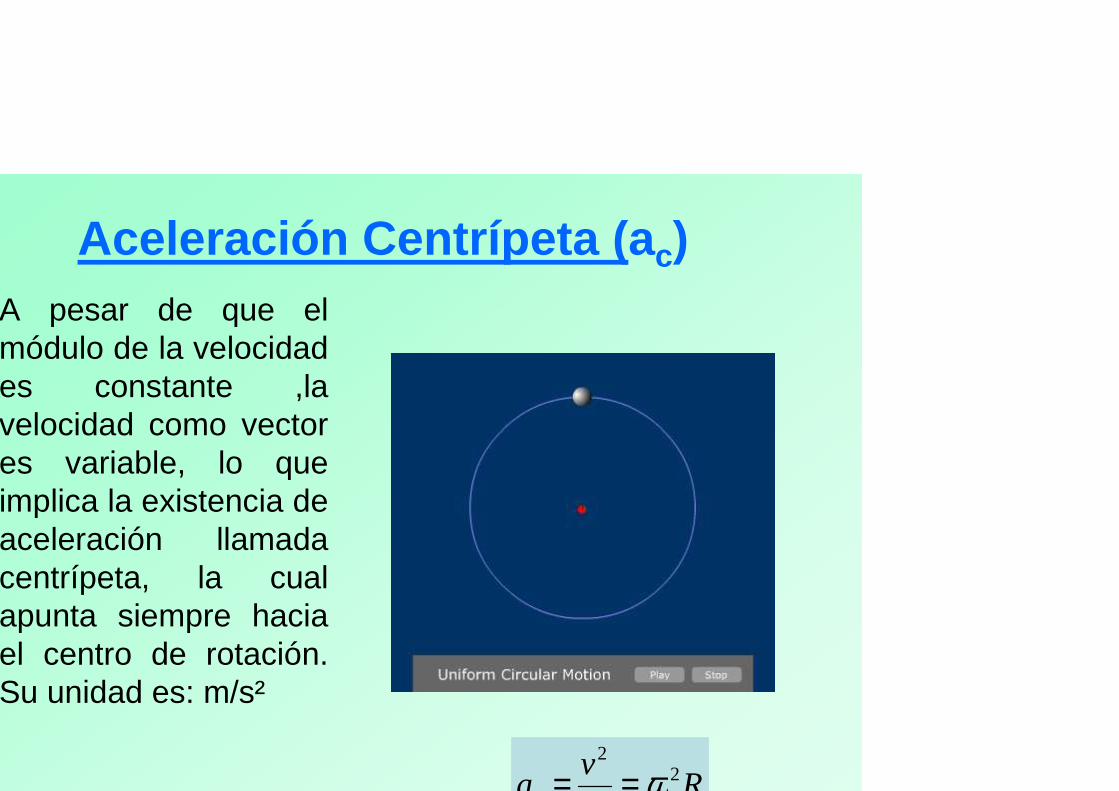
Aceleración Centrípeta ( ac)A pesar de que el módulo de la velocidad es constante ,la velocidad como vector es variable, lo que implica la existencia de aceleración llamada centrípeta, la cual apunta siempre hacia el centro de rotación. Su unidad es: m/s²
Rv
ac2
2
ω==
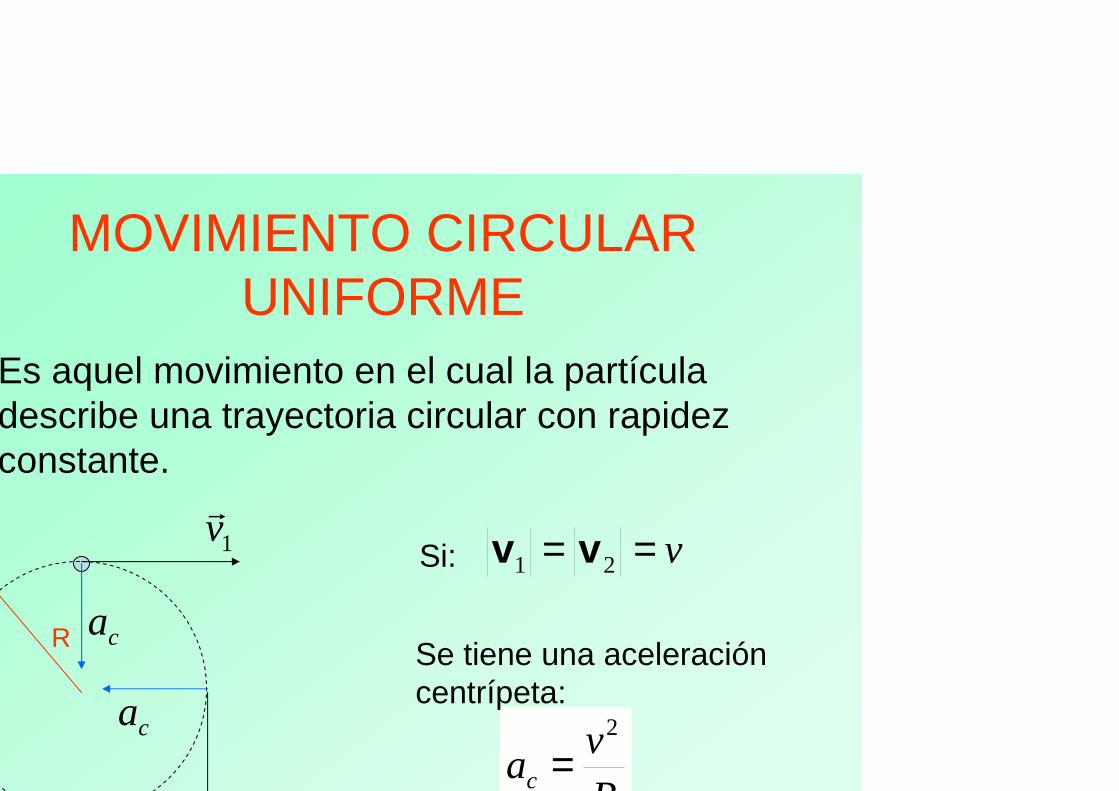
MOVIMIENTO CIRCULAR UNIFORME
Es aquel movimiento en el cual la partícula describe una trayectoria circular con rapidez constante.
1v�
R
v== 21 vvSi:
R
vac
2
=
Se tiene una aceleracióncentrípeta:
ca
ca

Velocidad angular (ω).- Se define como:
dt
dθω =
Si la velocidad angular es constante:
t
θω =
En el S.I. se mide en rad/s, pero puedeexpresarse en RPM (revoluciones porMinuto.
Rv
Rv ω=
θ
ω
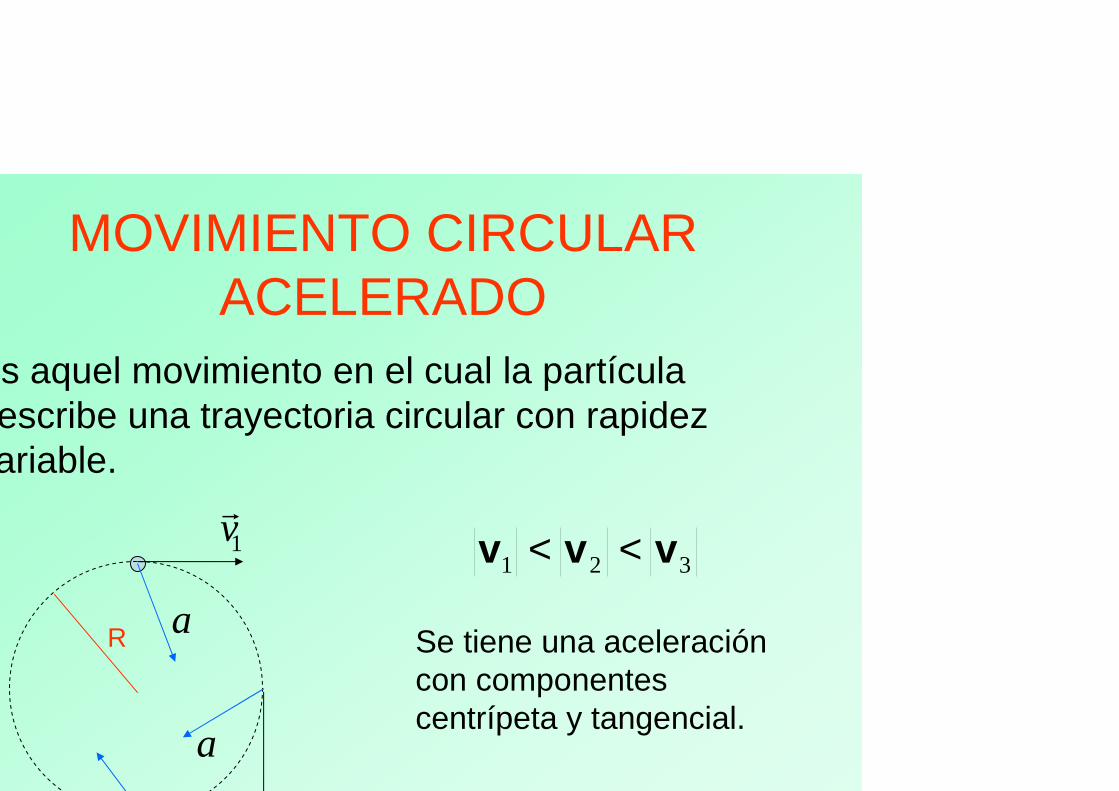
MOVIMIENTO CIRCULAR ACELERADO
Es aquel movimiento en el cual la partícula describe una trayectoria circular con rapidez variable.
1v�
R
321 vvv <<
Se tiene una aceleracióncon componentescentrípeta y tangencial.
a
a
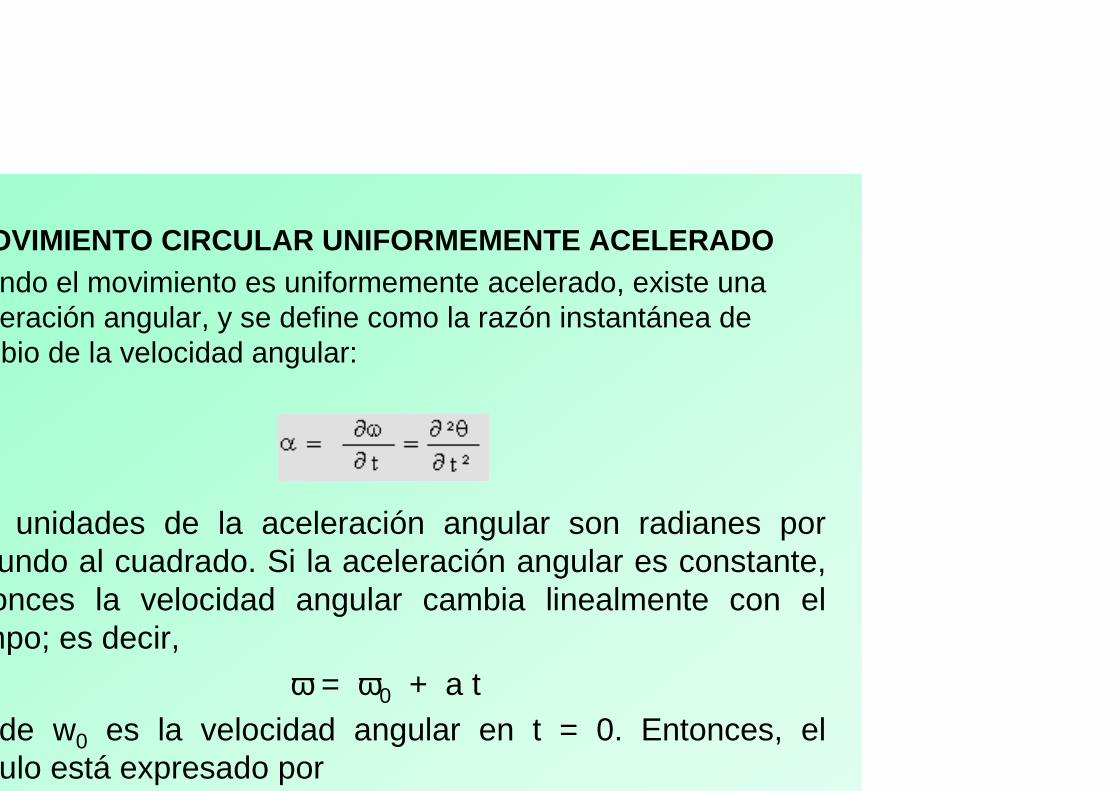
MOVIMIENTO CIRCULAR UNIFORMEMENTE ACELERADOCuando el movimiento es uniformemente acelerado, existe una aceleración angular, y se define como la razón instantánea de cambio de la velocidad angular:
Las unidades de la aceleración angular son radianes por segundo al cuadrado. Si la aceleración angular es constante, entonces la velocidad angular cambia linealmente con el tiempo; es decir,
ω = ω0 + a tdonde w0 es la velocidad angular en t = 0. Entonces, el ngulo está expresado por

DINAMICA
Es parte de la mecánica que estudia el movimiento de los cuerpos considerando las causas que la producen.
La mecánica clásica esta basada en las tres leyes de Newton:
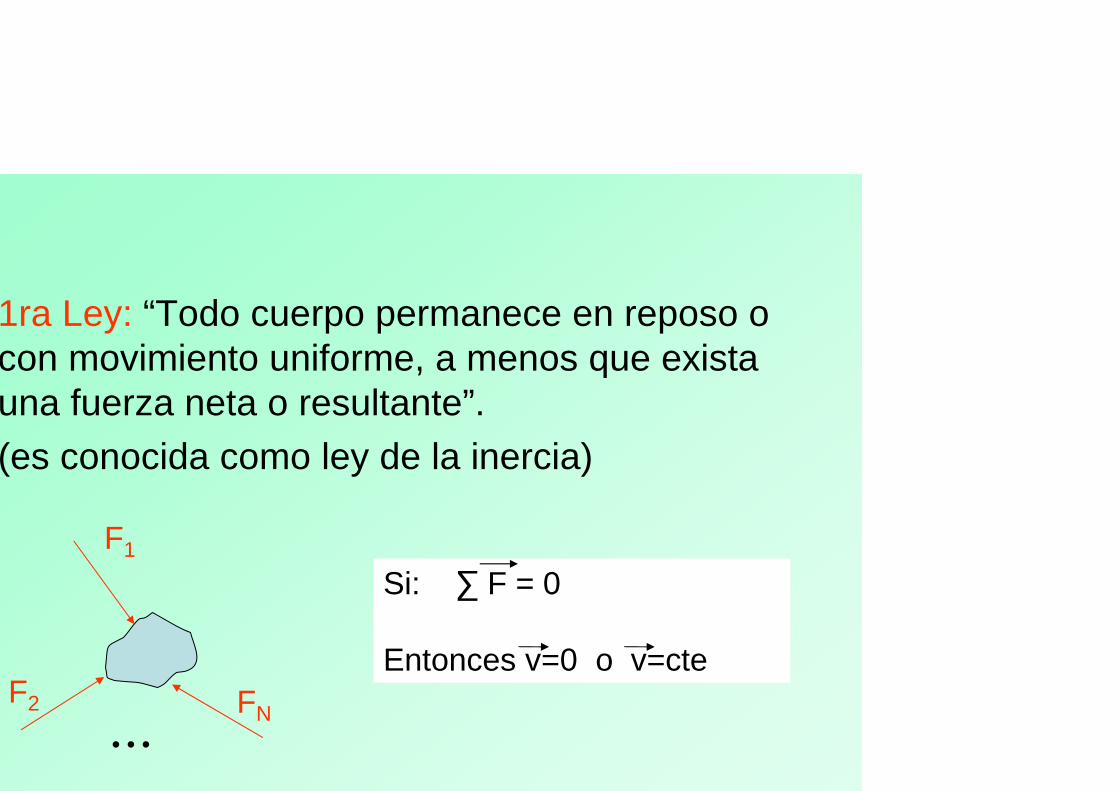
1ra Ley: “Todo cuerpo permanece en reposo o con movimiento uniforme, a menos que exista una fuerza neta o resultante”.
(es conocida como ley de la inercia)
Si: ∑ F = 0
Entonces v=0 o v=cte
• • •
F1
F2 FN
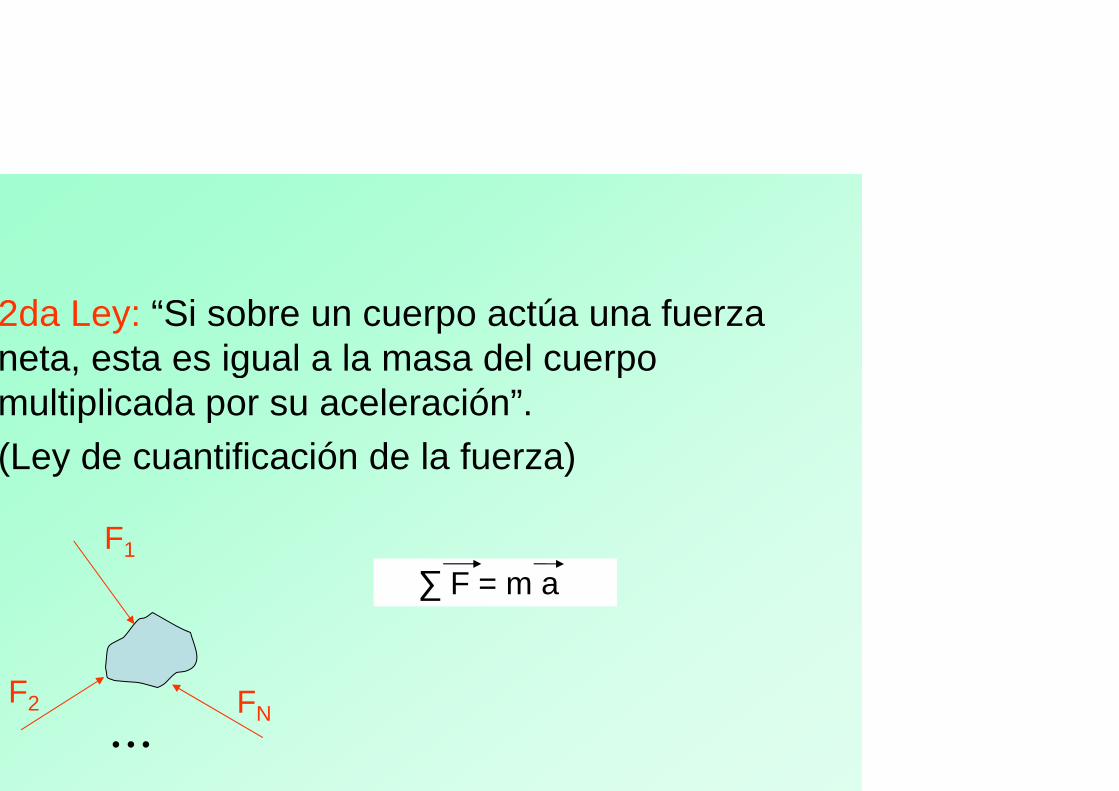
2da Ley: “Si sobre un cuerpo actúa una fuerza neta, esta es igual a la masa del cuerpo multiplicada por su aceleración”.
(Ley de cuantificación de la fuerza)
∑ F = m a
• • •
F1
F2 FN

Características
La fuerza y la aceleración son magnitudes vectoriales.
La dirección de la fuerza neta aplicada a un cuerpo tiene la misma dirección de la aceleración.
La unidad de la fuerza es el Newton (N), donde: 1 N = kg * m/s2. (SI).
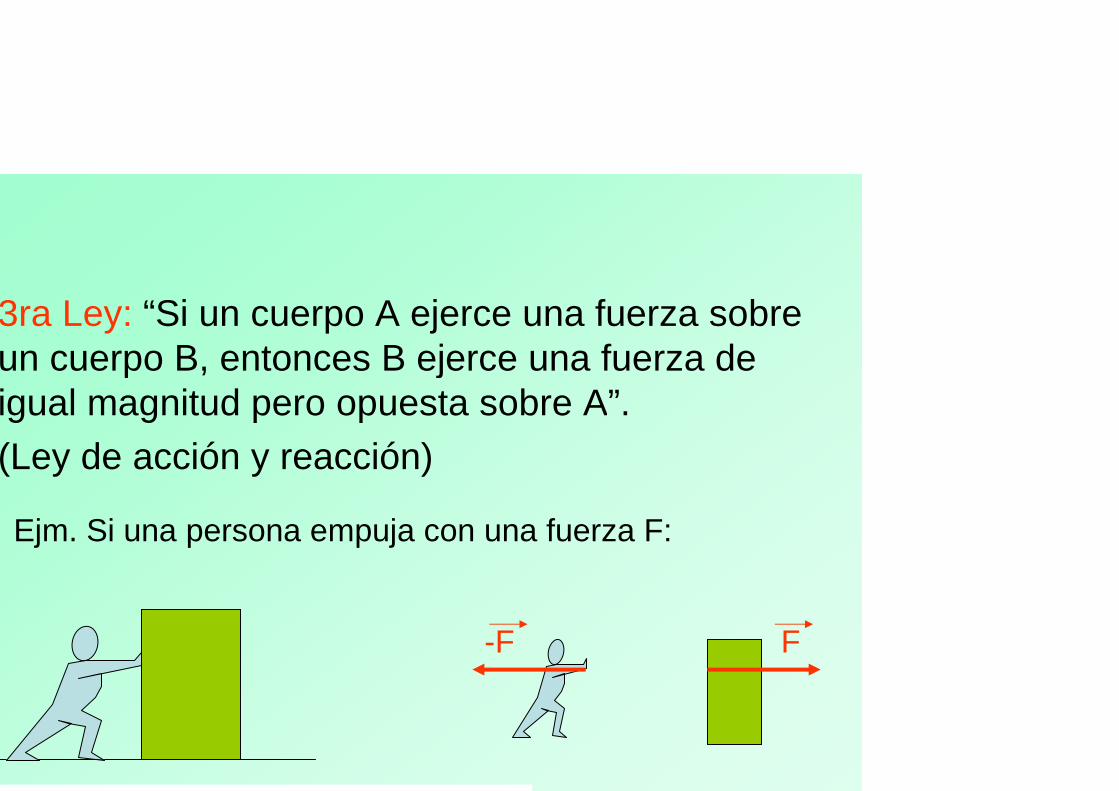
3ra Ley: “Si un cuerpo A ejerce una fuerza sobre un cuerpo B, entonces B ejerce una fuerza de igual magnitud pero opuesta sobre A”.
(Ley de acción y reacción)
Ejm. Si una persona empuja con una fuerza F:
-F F
Sistema de referencia inercial.- Es aquel sistema que esta en reposo o con movimiento uniforme, las leyes de newton solo se cumple en este sistema de referencia, Ejemplo: Consideremos un péndulo que se mueve con un vagón:

x
V=0 o V=cte
Sistemas de referencia inercial:
x’
y’
a (acelerado)
Sistema de referencia no inercial:
x’
y’T
mg
T
mg
x
y
S.R. inercial
NOTA: La tierra no es exactamente un sistema de referencia inercial, pero
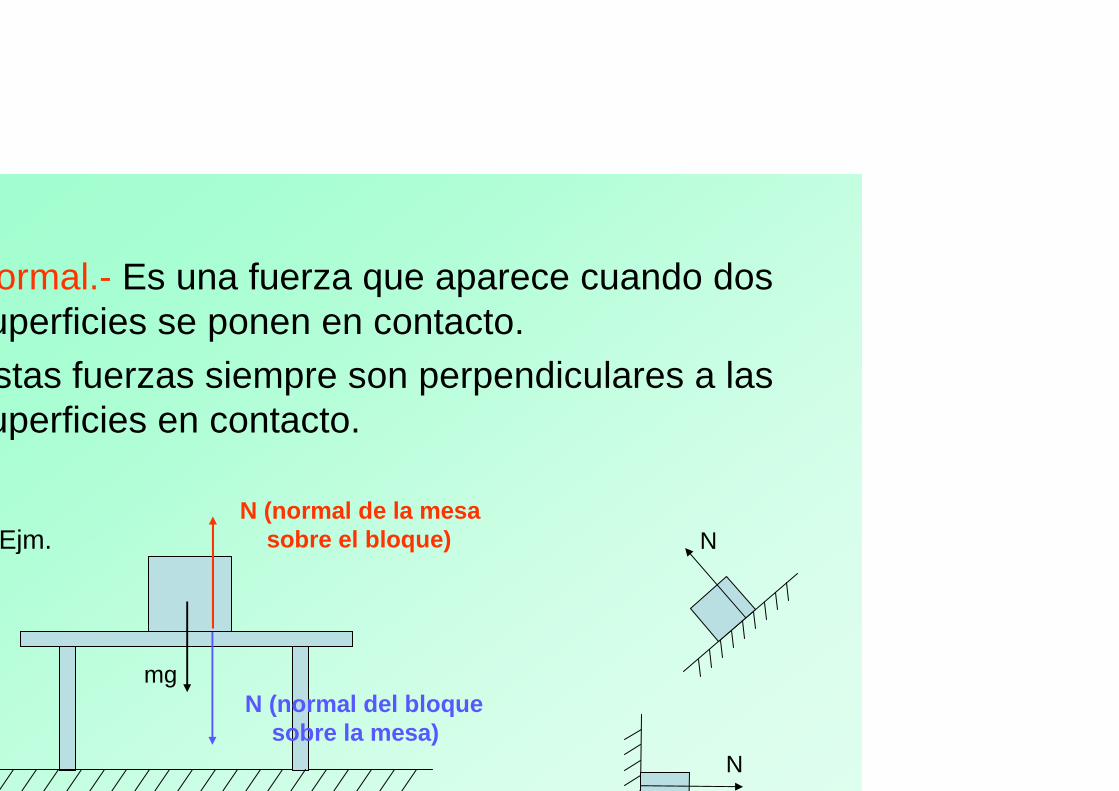
Normal.- Es una fuerza que aparece cuando dos superficies se ponen en contacto.
Estas fuerzas siempre son perpendiculares a las superficies en contacto.
N (normal de la mesasobre el bloque)
N (normal del bloquesobre la mesa)
Ejm.
mg
N
N

Fuerzas de fricción (fuerzas de rozamiento).-aparecen cuando una superficie desliza o tiende a deslizar sobre otra.Siempre son paralelas a las superficies en contacto.Consideremos un bloque al que se aplica una fuerza variable F :
f
F
f
máxSf ,
Fricció
n está
tica
KfFricción cinética

Existen dos clases de rozamiento: el ESTÁTICOy el DINÁMICO :
El rozamiento estático (Fs) aparece cuando se trata de poner un cuerpo en movimiento desde el reposo.
El rozamiento cinético o dinámico (Fk) aparece cuando el cuerpo está en movimiento.
Fr = µk • N
En el plano horizontal la fuerza de rozamiento se calcula :Fr= µ • N = µ • w = µ • m • g(El rozamiento estático es siempre mayor que el dinámico)
F
N
w

Magnitud de la fuerza de fricción cinética:
fK = µK N
Fuerza de fricción estática:
fS,max = µS N
fS ≤ µS N

LA TENSIÓNLa tensión se representa por T y es una fuerza que aparece siempre que se tira de una cuerda o de un cable.
En el S.I. se mide en N
a
a
w
N
T
FR
T
w
PLANO INCLINADO
PLANO HORIZONTAL
w
N
w
a
T
a
FR
T
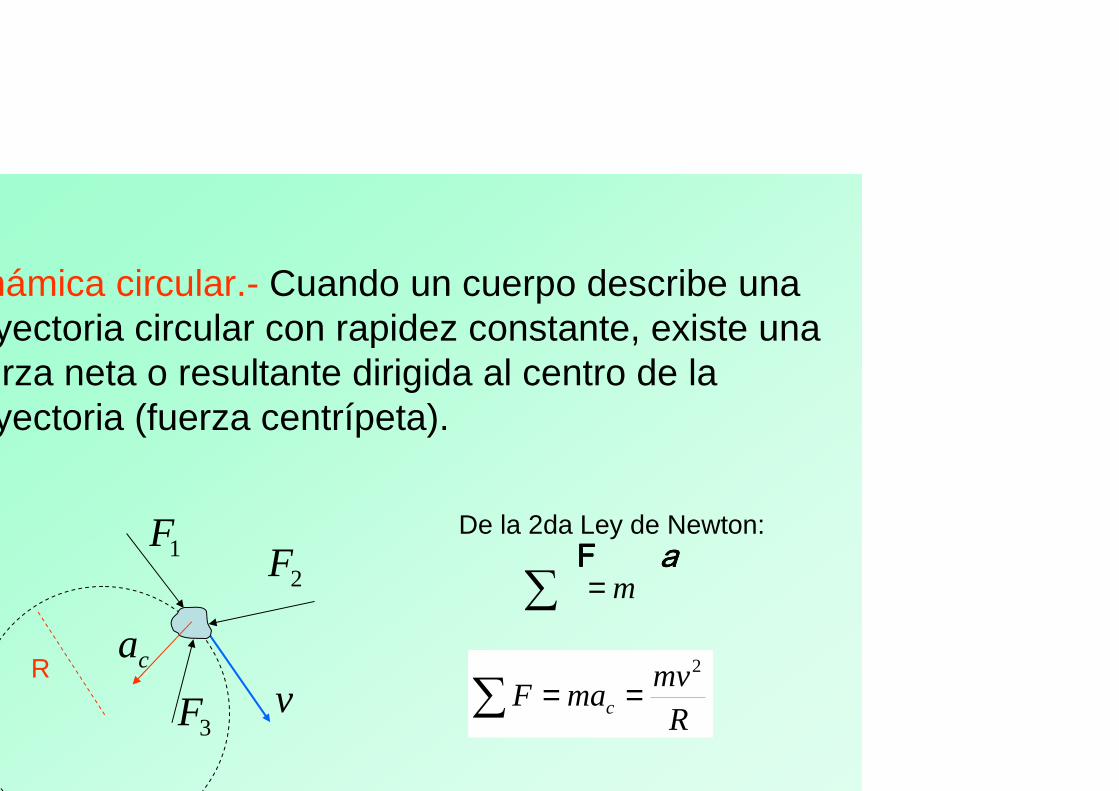
Dinámica circular.- Cuando un cuerpo describe una trayectoria circular con rapidez constante, existe una fuerza neta o resultante dirigida al centro de la trayectoria (fuerza centrípeta).
caR
aaaa∑ = mFFFF
3F
2F1F
∑ ==R
mvmaF c
2
v
De la 2da Ley de Newton:

• En función de la velocidad angular ω
2 22( )
c
v RF m m m R
R R
ω ω= = =