







Languages
Pages
Legal


Minimum cuts –
theory and algorithms
Geir Dahl, CMA, University of Oslohttp://folk.uio.no/geird/
Workshop, Bergen,Jan. 2008

Plan
I graphs, basic concepts
I flows and cuts
I the minimum st-cut problem
I the maximum flow problem
I algorithms
Graphs
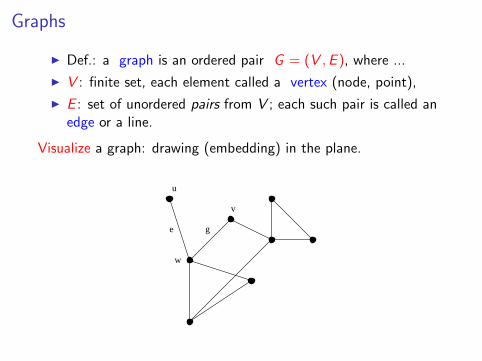
I Def.: a graph is an ordered pair G = (V ,E ), where ...
I V : finite set, each element called a vertex (node, point),
I E : set of unordered pairs from V ; each such pair is called anedge or a line.
Visualize a graph: drawing (embedding) in the plane.
u
v
w
e g

Paths
I path: alternating sequence of consecutive vertices and edges;no repeated vertex
I often: viewed as a sequence of edges.
I st-path: path between vertices s and t
u
v
w
e g
p
q
I Question: how many paths are there? Assume completegraph.
Graphs
I Walk: like a path, but repeated vertices are allowed. Thelength of a walk is the number of edges.
I Adjacency matrix: Given a graph G = (V ,E ) with verticesv1, . . . , vn, its adjacency matrix A ∈ IRn×n is a (0, 1)-matrixwhere the (i , j)’th element is 1 if [vi , vj ] ∈ E and 0 otherwise.A is symmetric and that it has zeros on the diagonal.
Theorem: The (i , j)’th entry of An, the n’th power of An, equalsthe number of different vivj -walks of length n in G.
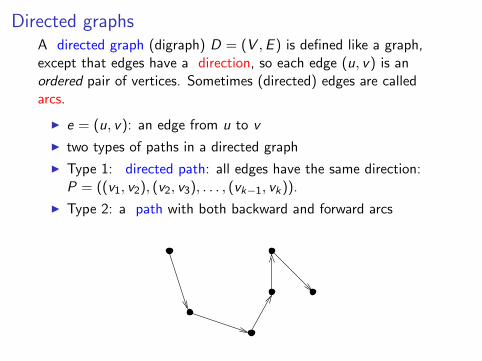
Directed graphsA directed graph (digraph) D = (V ,E ) is defined like a graph,except that edges have a direction, so each edge (u, v) is anordered pair of vertices. Sometimes (directed) edges are calledarcs.
I e = (u, v): an edge from u to v
I two types of paths in a directed graph
I Type 1: directed path: all edges have the same direction:P = ((v1, v2), (v2, v3), . . . , (vk−1, vk)).
I Type 2: a path with both backward and forward arcs

A flow concept: st-flow
Notation:
I δ+(v) = {e ∈ E : e = (v ,w) for some w}: arcs leaving v .
I δ−(v) = {e ∈ E : e = (w , v) for some w}: arcs entering v .
Given:
I D = (V ,E ) directed graph
I Two distinct vertices s, t ∈ V ; s is source and t is sink.
I a function: c : E → IR+; ce = c(u,v) is called the capacity ofedge e = (u, v).
A function x : E → IR+ is called an st-flow if the following holds∑e∈δ+(v) xe −
∑e∈δ−(v) xe = 0 for alle v ∈ V \ {s, t};
0 ≤ xe ≤ ce for all e ∈ E .
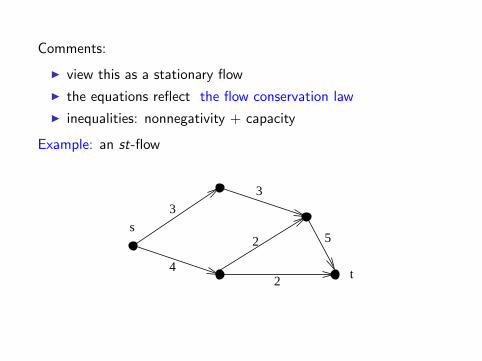
Comments:
I view this as a stationary flow
I the equations reflect the flow conservation law
I inequalities: nonnegativity + capacity
Example: an st-flow
s
t
3
4
3
2
2
5

Maximum flow
Consider:
I D = (V ,E ) directed graph, s, t ∈ V
I c : E → IR+: capacity function
I may assume no arc entering s and no leaving t
I define the value val(x) of an st-flow x as the amount of flowleaving the source s, i.e.,
val(x) =∑
e∈δ+(s)
xe .
The maximum flow problem is to find
an st-flow x with maximum value val(x).

What kind of optimization problem is this?
I continuous variables
I linear objective function val(x) = cT x
I constraints: linear equations and linear inequalities.
I So: a linear optimization problem (linear programming): LP
Lemma: A maximum st-flow x exists.
Proof: The set of feasible points is compact and the functionx → val(x) is continuous: apply the Extreme Value Theorem.

From the LP connection:
I proves existence once more
I may use efficient general LP algorithms, e.g. the simplexmethod.
I but we shall explain a combinatorial approach.
This is where the cuts come into play!
CutsLoosely speaking a cut in a graph is a set of edges which is abottleneck: you have to go through this bottleneck to get fromone side to the other.
More precisely, consider the situation:
I D = (V ,E ) directed graph, s, t ∈ V (distinct)
I let W ⊂ V where s ∈ W and t 6∈ W .
I define
K = δ+(W ) = {(w , v) ∈ E : w ∈ W , v 6∈ W }.
I and this set is called an st-cut.
I Moreover, if c : E → IR+ is a capacity function, we define thecapacity of the cut K = δ+(W ) as the total capacity of itsedges:
cap(K ) :=∑
e∈δ+(W )
ce .
I There is a finite number of cuts, so a trivial algorithm isenumeration.
I But: the number of cuts grows exponentially in n (except forsimple graphs).
I Many combinatorial problems are computationally hard forsimilar reasons.
I Some, however, have some kind of mathematical structurethat opens up for efficient algortihms.
I This is true for the minimum cut problem.
I But not for the maximum cut problem!
33
5
4
1
1
W
s
t
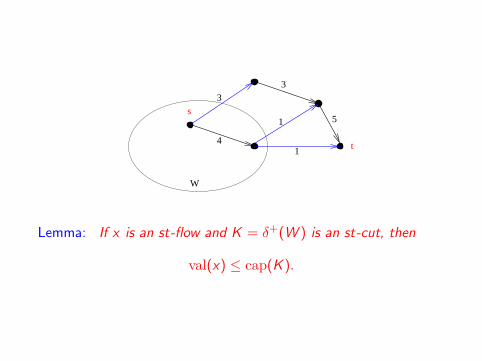
Lemma: If x is an st-flow and K = δ+(W ) is an st-cut, then
val(x) ≤ cap(K ).

Proof: Let f (x) be the value of the st-flow x , so f (x) := x(δ+(s)),and let S ⊂ V be such that s ∈ S , t 6∈ S and let C = δ+(S). Sumthe flow conservation equations for all vertices in W \ {s}:
val(x) =∑
e∈δ+(s) xe +∑
w∈W \{s}(∑
e∈δ+(v) xe −∑
e∈δ−(v) xe)
=∑
e∈δ+(W ) xe −∑
e∈δ−(W ) xe
≤∑
e∈δ+(W ) ce
= cap(K )
The inequality came from O ≤ x ≤ c .
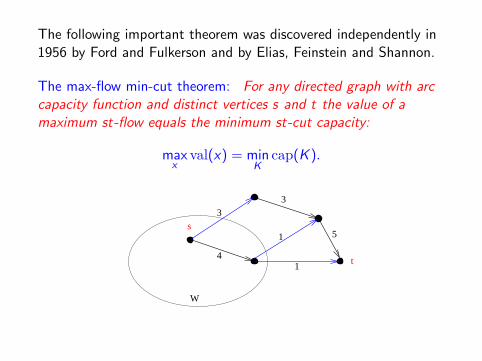
The following important theorem was discovered independently in1956 by Ford and Fulkerson and by Elias, Feinstein and Shannon.
The max-flow min-cut theorem: For any directed graph with arccapacity function and distinct vertices s and t the value of amaximum st-flow equals the minimum st-cut capacity:
maxx
val(x) = minK
cap(K ).
33
5
4
1
1
W
s
t

There is a nice constructive proof of this result.Illustrate this by an example. Black numbers are capacities, red orblue flows.
0. Start with zero flow, x = O.1. Find an augmenting path.
33
5
4
1
1
s
t
3 3
3
Now, val(x) = 3.
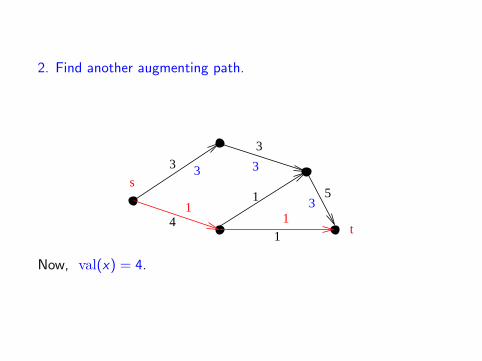
2. Find another augmenting path.
33
5
4
1
1
s
t
3 3
311
Now, val(x) = 4.

3. Find one more augmenting path.
33
5
4
1
1
s
t
3 3
3111
1
1
The resulting flow has val(x) = 5.
33
5
41
s
t
3 3
1 12 41 1
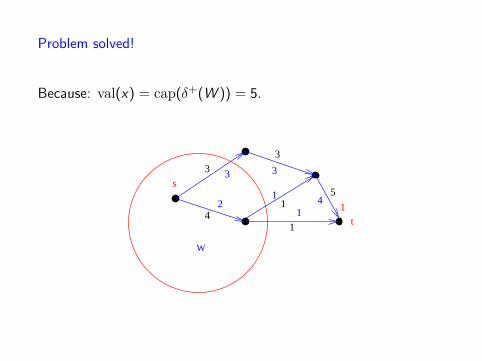
Problem solved!
Because: val(x) = cap(δ+(W )) = 5.
W
33
5
41
s
t
3 3
1 12 411

So: this suggests that
I we solve the problem by finding iteratively a directedaugmenting st-path
I for each edge in the path the present flow is below thecapacity
I and modify the flow accordingly.
I at termination we have also found a minimum cut.
WRONG !!!!
This algorithm may get stuck in a nonoptimal solution. A moreadvanced notion of augmenting path is required.

Let x be an st-flow and consider an sv -path P in D (notnecessarily directed path). Let
I P+: forward edges in P
I P−: backward edges in P
We say that P is x-augmenting to v if
I xe < de for each e ∈ P+
I xe > 0 for each e ∈ P−.
If v = t, we call P an x-augmenting path.
Proposition An st-flow x is maximum if and only if there is nox-augmenting path.
Proof: Look at the set V (x) of vertices v such that anx-augmenting to v exists.
Using a simple labeling method we determine this important setV (x); this is the core in the algorithm.
This gives the Ford-Fulkerson labeling algorithm: it solves boththe maximum flow problem and the minimum cut problem at thesame time. It works on a residual graph.
Proof of the Max-flow Min-cut theorem: Let x be a maximum flow(we know it exists!). According to the Proposition on maximumflows, there is no x-augmenting path and the flow value val(x)equals the capacity of the cut K (x) (induced by V (x) definedabove). Then, since maxx val(x) ≤ minK cap(K ), it follows that xis a maximum st-flow and K (x) is a minimum st-cut.

Algorithms
I The labeling algorithm has complexity O(nmU) where n ifthe number of vertices, m the number of edges and U themaximum capacity.
I Empirically: performs well. (Works for rational capacities.)
I Weakness: many augmentations.
I maximum augmenting path algorithm and capacity scalingalgorithm: augment on paths with large residual capacity:O(m log U)
I preflow push algorithm: O(n2m)
I highest-label preflow push algorithm: O(n2√m): fastest
I For planar graphs the min. cut problem corresponds tosolving the shortest path problem in the dual graph: givesO(n log n) algorithm.
I read more: Ahuja et al., Network Flows: Theory, Algorithmsand Applications. Prentice-Hall, 1993.
Applications
I feasible flow problem (more general flow balance constraints)
I matrix rounding
I scheduling of computer jobs (two-processor)
I tanker scheduling
I subproblem in e.g. Traveling Salesman Problem
I image restoration and segmentation

Final comments
I max-flow min-cut theorem example of a min-max theorem,often involving combinatorial objects.
I related to the duality theory of linear optimization and thenotion of total unimodularity of matrices.
Top Related