






Languages
Pages
Legal


Joint tracking in friction stir welding
Paul Fleming Vanderbilt University Welding Automation Laboratory

Introduction
This research presents methods for the monitoring of tool alignment relative to the joint-seam in Friction Stir Welding, as well as techniques for implementing automatic seam-tracking for Friction Stir Welding

Friction stir welding
Material joined by a rotating tool which traverses along joint line
Joint types include: lap, T and butt
R. S. Mishra and Z. Y. Ma, Materials Science & Engineering R-Reports, 2005, 50(1-2), III 78.

Goal of this research
Develop system capable of detecting the lateral position of the FSW with respect to a desired position such as centered about the weld seam
Developing system which utilizes above estimator in a feedback control system which maintains a desired lateral position This is “Through the Tool Tracking” (TTT)
Patent pending serial number Serial No. is 12/130,622
Alignment of FSW tool
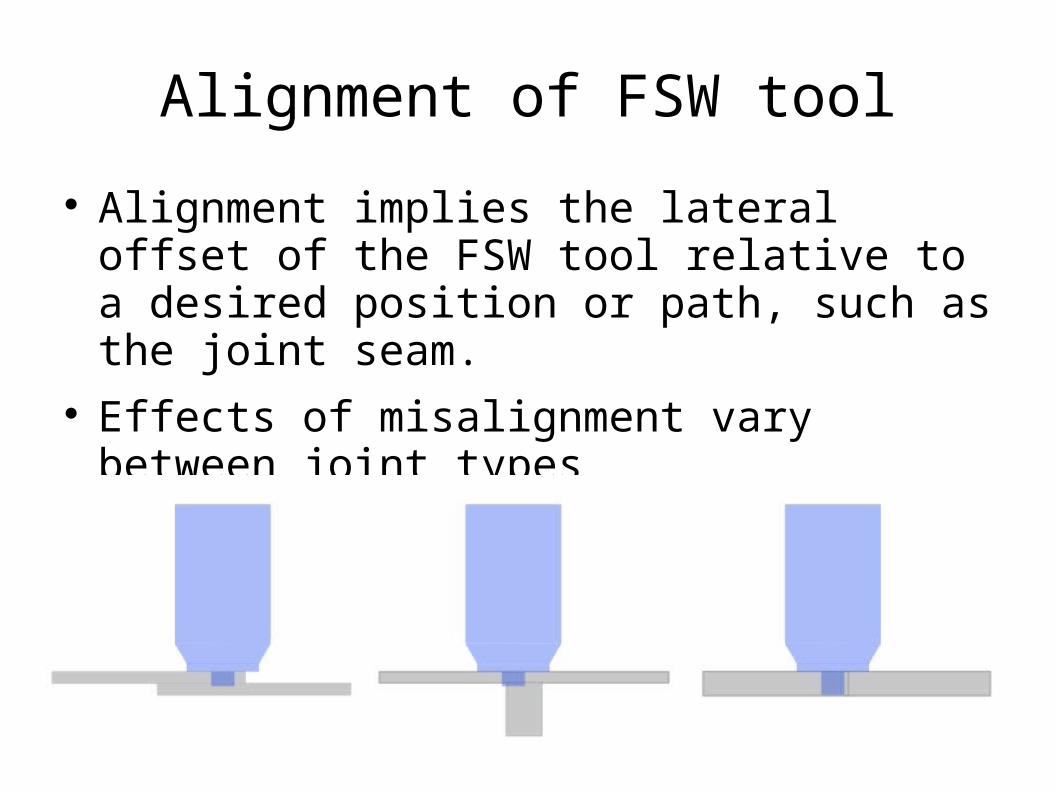
Alignment implies the lateral offset of the FSW tool relative to a desired position or path, such as the joint seam.
Effects of misalignment vary between joint types

Purpose of research
The estimator itself could be used as an in-system quality check: misalignment can cause a number of quality flaws and in some joint-types (such as blind T-joints) it may not be possible to determine lateral position by visual inspection
TTT would provide automated seam-tracking, which could allow for tracking of linear and non-linear weld seams.
Force as a feedback signal
Forces collected during the weld are used as the feedback signal to determine lateral position
Force signals have already been used in FSW: Discover metallurgical defects Detect gaps in sample fit-up Implement load-control Estimate tensile strength

Experimental Case: Blind T-Joints
Experiment to determine ability to predict lateral offset by collected force signals
30 welds are run with a varying lateral alignment
Forces (X,Y,Z and Mz) are recorded throughout each weld

Results: Recorded forces (axial)

Results: Recorded forces (axial)
Voids

Results: Recorded forces (traverse)

Results: Recorded forces (traverse)
Voids

Results: Collected Forces
Examining recorded forces indicate develop of lateral position estimator very likely possible
Attempt to implement position estimator using machine learning techniques, treat forces as input data and known lateral position as target

Position estimation
Desire to construct an estimator which can predict offset position given gathered forces.
Many possible choices: linear or non-linear regression, regression tree, SVM
General regression neural network chosen

Neural Networks
Neural networks are non-linear statistical data modeling tools.
They can be used for classification and regression problems
http://en.wikipedia.org/wiki/Image:Artificial_neural_network.svg#file

General Regression Neural Network
GRNN is an artificial neural network which estimates continuous variables using probability density functions
Converges to conditional mean regression surface
D. F. Specht, IEEE transactions on neural networks, 1991, 2(6), 568 - 576

GRNN performance
Actual Offset Position
PredictedOffsetPosition

Continuous monitoring of weld
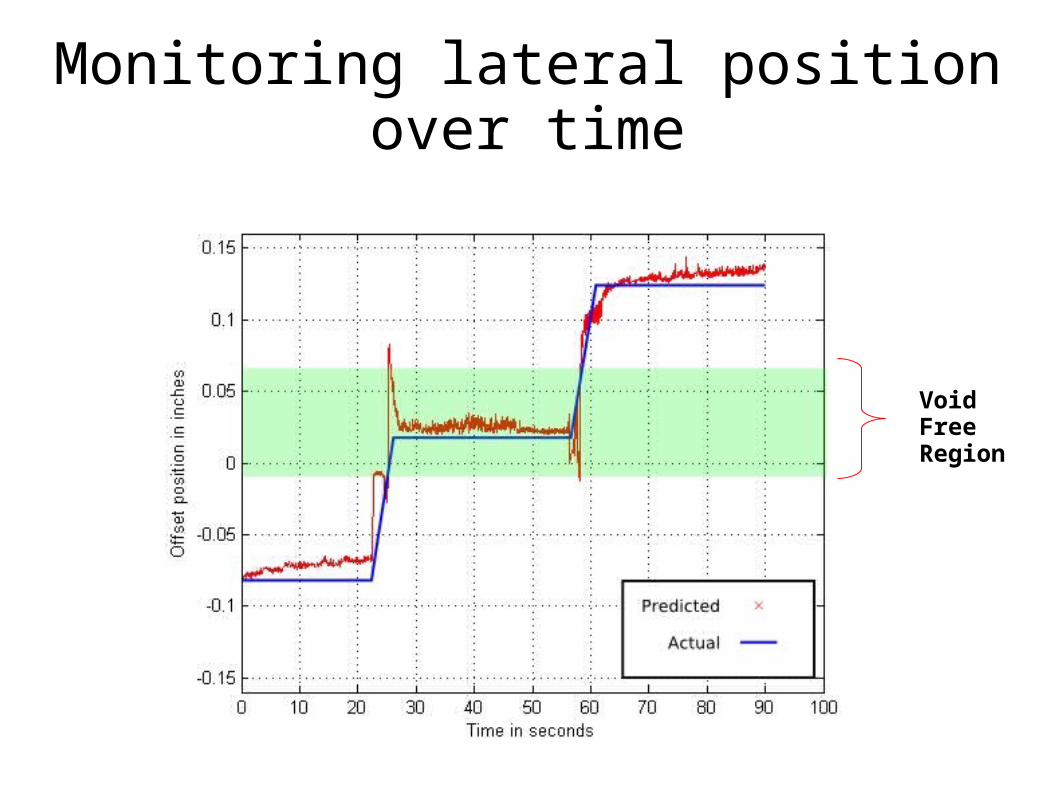
After learning the GRNN using training data, then applied network to weld runs where the lateral offset was changed several times throughout the weld
Monitoring lateral position over time
VoidFreeRegion

Monitoring lateral position over time

Research into Monitoring Capabilities
Presented research demonstrates effectiveness of technique for determining offset position in “open-air” T-joints
Current research seeks to apply the same technique to lap-joints
Additional research topics: Enhancing the signal Applicaitions...

Using system for on-line tracking
The system as described could be used for quality monitoring of an FSW process
Additionally, the system could be used as a lateral position estimator in an FSW seam-tracking system
FSWPLANT
ForceData
Lateral PositionEstimator
Lateral PositionEstimator
Estimated
LateralPosition
Actuator
ControlSignals

On-line seam-tracking
The system is envisioned in two-varieties In one, it is assumed that it is capable for an
estimator block to be developed which can determine the magnitude and direction of lateral offset. A controller maintains the desired offset throughout the weld
In another case, a signal is maximized at a certain position (such as the axial force in this experiment around the centered position). In this case, the system weaves back and forth to gain the center position.

Incorporating load control
Load control is a component of some FSW systems.
The seam tracking system, which uses forces as its input signal, could be made to include load control by operating in two alternating stages: Use seam-tracking to move tool to desired offset Use load control to obtain desired axial force as
known location
Future research
Future research for both monitoring and control Monitoring:
Improving the offset monitoring system and applying to more joint types
Tracking: Development and testing of systems which
automatically track the weld seam

Thank you
Questions?
Top Related