






Languages
Pages
Legal


http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
1/24 IVIセミナー
(株)デンソーウェーブ ORiN協議会 技術委員会
つながる制御システムを支える技術 ORiN
2015年12月10日
犬飼 利宏
お題: 「ORiNによる設備間データ連携の方法」

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
2/24 アジェンダ
1. ORiN開発の背景
2. ORiNの概要
3. 活用事例
パッケージバンドル系
設備制御系
設備情報系
4. ORiN IoT コンセプト
5. ORiN のセキュリティ対策
6. 今後の方針 ORiN version 3
二つの”革命”プロの実装基盤としてのORiN3
そして第一次産業,第三次産業へ
第1部: 「オープンFAソフトウェア基盤技術ORiN2の紹介」
第2部: 「Ready for “Industry 4.0” and “ロボット革命”」

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
3/24 1. 開発の背景
◆各デバイス仕様に従った複雑な接続
Before
FAアプリケーション(ソフトウェア)
開発期間が長い(”つなぐ”部分も個々) 開発&メンテナンス費用が高い システム構成が複雑 『一品物』
◆ ORiNで統一的にスマートに接続
After
開発期間が短い 開発&メンテナンス費用が安い システム構成がシンプル 『汎用品』
設備監視・制御ソフトウェアの再利用性を飛躍的に向上(ハードウェアの規格なし)
NEDOのプロジェクトとしてスタート(1999年)

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
4/24 2. ORiNの概要(ソフトエンジニア向け説明)
DB2 Oracle SQL
Server MySQL PostgreSQL
Database
DBアプリケーション
ミドルウェア
OLEDB, ADO, ODBC, JDBC FA版
FAアプリケーション
①ミドルウェア
ORiN2 CAO
FA Device ③通信プロトコルCAP
②データスキーマCRD (デバイスプロファイル等)
「多種多様なデバイスが存在するため,①ミドルウェアだけでは不十分だったため②③もオプショナルで開発された」
.xml
この部分がOPC UAに近い

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
5/24 2.1 ORiN2アーキテクチャ
他規格のデバイス
他規格のアプリケーション
CAP
Cloud
CaoSQL OPC App. Z
CAO
アプリケーション向け
インターフェイス
A Co. B Co.
App. X
App. Y
アプリケーション
エンジン
プロバイダ
デバイス
C Co. D Co.
アプリソフトに依存しないで機能を公開できる!
デバイス向け
インターフェイス
デバイス依存を最小限にしてアプリ開発できる!
Dev. B
デバイスを抽象化し統一的・透過的なアクセス手段を与える
抽象デバイス
CRD
CAP
①
②
③-1
③-2
SQLServer, Oracle

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
6/24 [補足] アプリ⇔アプリ間連携
「機能プロバイダ」によりアプリ間連携が可能に!アプリのガラパゴスを防ぐ!
Subscribe publish

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
7/24 [補足] デバイス⇔デバイス間連携
データ変換,
データリンク機能
アプリ間/デバイス間連携を容易にできるのもORiN三階層モデルのメリット!
BCD
Integer String

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
8/24
Internet
[参考] CAPシリーズの接続形態
サーバ
ORiN2
ORiN2
クライアント CAOアプリケーション
CAOエンジン
CAPプロバイダ
CAPリスナ
CAOプロバイダ
Web サーバ Dllhost
CAOエンジン
(1) (2) (3)
e-CAPプロバイダ
e-CAPリスナ
(4)
b-CAPプロバイダ
b-CAPリスナ
(5)
http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
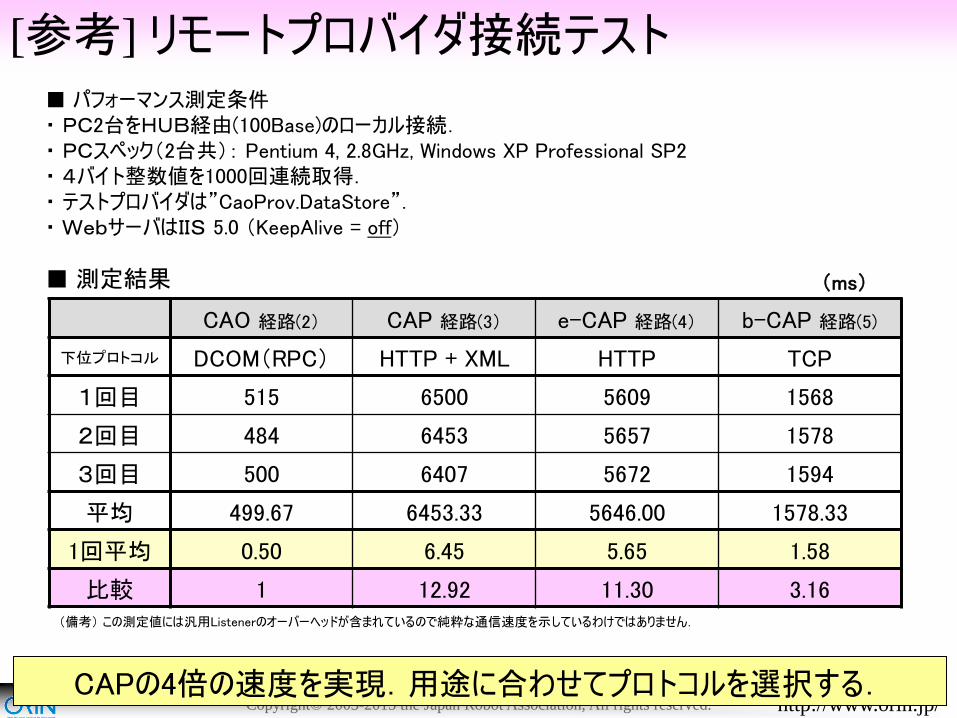
9/24 [参考] リモートプロバイダ接続テスト
CAO 経路(2) CAP 経路(3) e-CAP 経路(4) b-CAP 経路(5)
下位プロトコル DCOM(RPC) HTTP + XML HTTP TCP
1回目 515 6500 5609 1568
2回目 484 6453 5657 1578
3回目 500 6407 5672 1594
平均 499.67 6453.33 5646.00 1578.33
1回平均 0.50 6.45 5.65 1.58
比較 1 12.92 11.30 3.16
(ms)
■ パフォーマンス測定条件 ・ PC2台をHUB経由(100Base)のローカル接続. ・ PCスペック(2台共): Pentium 4, 2.8GHz, Windows XP Professional SP2 ・ 4バイト整数値を1000回連続取得. ・ テストプロバイダは”CaoProv.DataStore”. ・ WebサーバはIIS 5.0 (KeepAlive = off)
■ 測定結果
CAPの4倍の速度を実現.用途に合わせてプロトコルを選択する.
(備考) この測定値には汎用Listenerのオーバーヘッドが含まれているので純粋な通信速度を示しているわけではありません.

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
10/24 デモ
1. 「CAOプロバイダの実装」
2. 「CAOアプリケーションの実装」

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
11/24 3. 事例の分類 (15,000エンジンの実績)
パッケージバンドル系 ■例: デンソーロボットアプリケーション ・WINCAPSⅢ ・Robot Tools ・RC8
■例: • 設備コントローラ • 検査装置
設備制御系
■例: • 設備稼働監視システム • 品質データ管理システム • 不具合発生連絡システム
設備情報系

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
12/24 3.1 事例1: パッケージバンドル系 バンドル系
ORiN2 SDK
WINCPAS III Robot Tools EMU Enhanced MUlti robot simulator
VRC Virtual Robot Controller
RC8 Controller
組込みORiN
イメージロガー
制御ログアナライザ
✕
ロボット言語
✕

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
13/24 3.2 事例2: 設備制御系(IPC設備制御) 制御系
【特徴】
• Visual Basicで全てのシーケンス制御を実現
• ORiNで全てのデバイスを抽象化
• PLCに比べ制御プログラム開発期間を大幅に短縮 開発工数が 1/3 に!
ソフトウェア構成 ハードウェア構成
FA機器がパソコンの周辺機器のような感覚でプログラミングできた!
初めて設備プログラミングした人なのに
デンソーロボット
http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
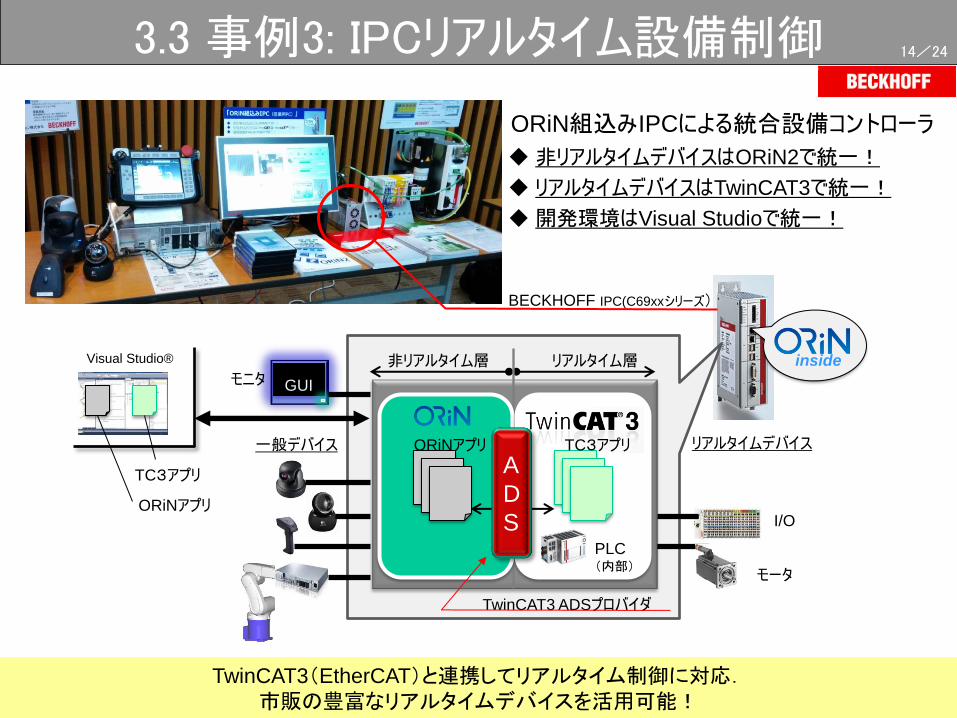
14/24 3.3 事例3: IPCリアルタイム設備制御
ORiN組込みIPCによる統合設備コントローラ
inside リアルタイム層 非リアルタイム層
BECKHOFF IPC(C69xxシリーズ)
Visual Studio®
GUI
モータ
モニタ
TC3アプリ
ORiNアプリ
リアルタイムデバイス 一般デバイス
PLC (内部)
TC3アプリ ORiNアプリ
I/O
◆ 非リアルタイムデバイスはORiN2で統一!
◆ リアルタイムデバイスはTwinCAT3で統一!
◆ 開発環境はVisual Studioで統一!
A
D
S
TwinCAT3 ADSプロバイダ
TwinCAT3(EtherCAT)と連携してリアルタイム制御に対応.
市販の豊富なリアルタイムデバイスを活用可能!
http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
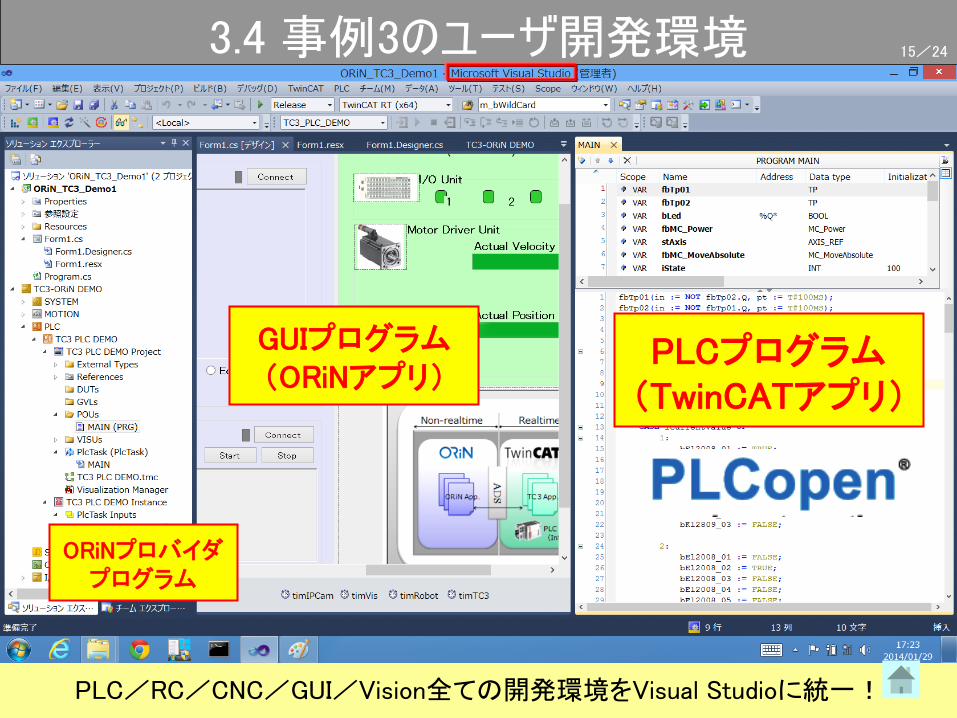
15/24 3.4 事例3のユーザ開発環境
PLC/RC/CNC/GUI/Vision全ての開発環境をVisual Studioに統一!
GUIプログラム (ORiNアプリ)
PLCプログラム (TwinCATアプリ)
ORiNプロバイダ プログラム

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
16/24 3.5 事例4: 設備情報系 Factory Server
Line Server
DENSO Controller
DENSO Robot
Digital Panel
AB PLC
Mitsubishi PLC
MELSEC NET
Ethernet
DH+
シーケンサ接続には OPCプロバイダも活用 稼働率向上のための
各種アプリ 1万以上の項目 を常時監視
情報系
500台以上(2008年)のFA機器が接続され様々なアプリケーションが稼働中

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
17/24 3.6 事例4のアプリケーション例 WEB監視 イージーバックアップ モバイルモニタ 設備データ抽出 ネットワークあんどん
ロボットIO制御 外観検査 断線検出 Pinger イベント音声通知 Page Jumper
設備シミュレータ 3次元遠隔監視 POP(生産指示) ファイルマネージャ 時刻同期ツール

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
18/24 アジェンダ
1. ORiN開発の背景
2. ORiNの概要
3. 活用事例
パッケージバンドル系
設備制御系
設備情報系
4. ORiN IoT コンセプト
5. ORiNのセキュリティ対策
6. 今後の方針 ORiN version 3
二つの”革命”プロの実装基盤としてのORiN3
そして第一次産業,第三次産業へ
第1部: 「オープンFAソフトウェア基盤技術ORiN2の紹介」
第2部: 「Ready for “Industry 4.0” and “ロボット革命”」
ベース

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
19/24 4.1 ORiN IoT コンセプト
■ ORiN IoTは「データの収集,加工,保存,通知,公開」に特化したデータ管理層を持つ
3階層アーキテクチャで,アプリ部とデバイス部を分離させる.
■ 末端設備からクラウドまでシームレスにつなぐ(ORiNベース)
各工場 本社
クラウド
アプリケーション
デバイス EtherCAT, ProfiNET, Ethernet/IP
Ethernet, RS232C,独自プロトコル,・・・
DB
OPC DA, OPC UA, SNMP, CoAP,
CAP, 独自プロトコル,DB,・・・
ORiN IoT DS

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
20/24 4.2 コンセプト誕生の背景(デンソーGの紹介) ←自動車部門 非自動車部門→
Input
Output
デンソーグループ 売上 4.1兆円 従業員 14万人 150工場,2,500ライン,150,000設備
デンソーの工場におけるIT活用の歴史は長い.それ故…

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
21/24 4.3 コンセプト誕生の背景(当時の課題)
• 管理するデータ(例:稼働率,品番等)を標準化してPLCに集約していたが,本当に必要な設備改善に繋がる情報は都度変化する. ⇒ 毎回ラダーの変更が必要になり,現場がそこまでしてやる価値を見い出せず,結局使われなくなった.
• 近年のFAデバイスの進化が早く,それを積極的に使いたいのだが,デバイスを変えると工場情報システムも見直さなくてならない. ⇒ 情報システムが生産設備改善の足枷になるという本末転倒な事例が出てきた.
• PLCに繋がらないデバイスの情報は収集できない.しかし生産システムには多様なデバイスがある.PLCがない設備もある(CNC/RC中心設備)
• デバイスに依存した一品モノの情報システムを展開してしまい,一品モノが工場に溢れてきた. ⇒ 一品モノは使い易さの改善が継続されなくなり,現場に見放されていった.
• 使いにくい情報システムは業務の効率化どころか業務負荷を増やしてしまう.
システム規模や用途の拡大に対応可能なスケーラビリティのある 標準デジタル基盤上でシステムを実装しないといつか破綻する!
教訓
開発スタート(1999年)

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
22/24 4.4 IoT DSを核にしたIoTアーキテクチャ
各工場(使命:工場最適)
本社オフィス
(使命:全体最適)
③工場情報管理
中央システム
Factory Data Server
KPI
Line Data Server
②工場最適化ツール群
①セル/ライン最適化ツール群
Cloud
資材入荷 製品出荷
Cell Data Server
Enterprise Data Server
全てのData Serverに唯一のIoT DS(設定が違うだけ)
全てのIoTアプリはIoT DSからのみデータを取得
IoT DSは全てのデバイスの情報を提供

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
23/24 4.5 IoT Data Studio
「データの収集,加工,保存,通知,公開」するデータ収集ミドルウェア
第1弾: 国際ロボット展(12月)
KPIライブラリ
プロバイダ・ライブラリ

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
24/24 デモ
1. 「IoT Data Serverのアイテム設定」

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
25/24 4.6 IoT Data Server (仮称) IoT Data Server =
IPC8 + IoT Data Studio + ①データベース機能 + ②見える化機能
大規模システムの場合
(セパレート型)
小中規模の場合
(オールインワン型)
IoT Data
Server IoT Data
Server
市販データベース
市販見るえ化ツール
☆IoT Data Server 自身が簡易DB機能と簡易見える化機能(Webサーバ機能+簡易エディタ機能)を内蔵しているのでオールインワン型も可能!

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
26/24 [参考] ORiN IoTの工作機械向けソリューション
DENSO ORiN IoT Data Server
IoT Data Studio (大規模)
視覚化・分析等
アプリ
Web Server
HTML HTML
HTML (小規模)
視覚化・分析等
アプリ
システム通信プロトコルあり システム通信プロトコルなし
メーカ毎(機種毎) or 標準規格の
プロバイダを使用
ケース① ダイレクト接続 ケース② IoT端末使用 ケース③ COM変換接続 ケース④ 非接続
IoT端末と
b-CAP/RACプロバイダを使用
COM-Ethernet変換器と
RACプロバイダを使用 QRコード端末と
b-CAP/RACプロバイダを使用
例:I/O
例:RS232C
ORiN IoTは最新式~旧式の加工機まで全てをIoTの世界へつなぐ唯一のプラットフォームです.
現場で読み取り
2. RAC string
“PUT:NC1::HAND:4,100”
3. G-Code
DPRINT “PUT:NC1::HAND:4,100”
例:Raspberry Pi 1. Ether変換
例:XPort

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
27/24 [参考] b-CAPオープンソースの活用

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
28/24
考え方: 「デバイスアクセスを一本化してそこを重点管理」
5. ORiN2セキュリティ対策
① ORiN組込みIPCの保護
→ ORiN自体の機能
② ネットワークの保護
→ ORiNが提供する連携機能
③ 状況認識による保護
→ ORiNが提供する連携機能
上位系(情報系)
下位系(制御系)
ORiN IoT DS
例: McAfee 連携機能
例: b-CAP Secure, SNMP連携機能
例: Syslog機能によるSIEM連携
無垢な無防備!
IPA/SECで検証予定. 結果をFBして随時改良していく. 大規模な改良はORiN3(次期型)へ
http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
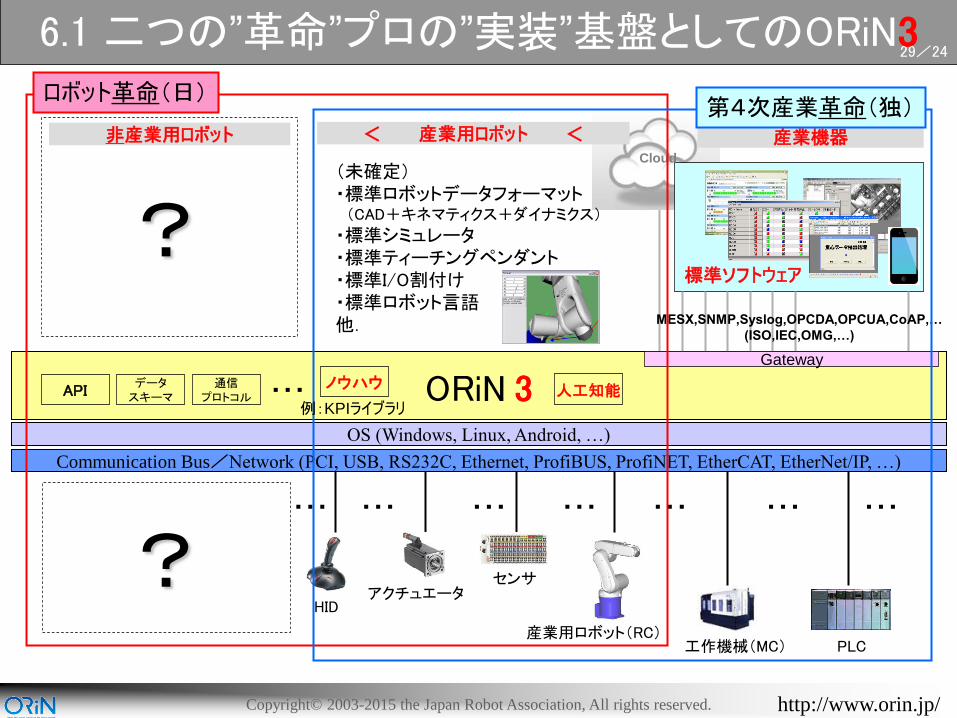
29/24 6.1 二つの”革命”プロの”実装”基盤としてのORiN3
ORiN 3 OS (Windows, Linux, Android, …)
Communication Bus/Network (PCI, USB, RS232C, Ethernet, ProfiBUS, ProfiNET, EtherCAT, EtherNet/IP, …)
? (未確定) ・標準ロボットデータフォーマット (CAD+キネマティクス+ダイナミクス)
・標準シミュレータ ・標準ティーチングペンダント ・標準I/O割付け ・標準ロボット言語 他.
産業用ロボット(RC) 工作機械(MC) PLC
? アクチュエータ
センサ
・・・ ・・・ ・・・ ・・・ ・・・ ・・・
標準ソフトウェア
MESX,SNMP,Syslog,OPCDA,OPCUA,CoAP,…
(ISO,IEC,OMG,…)
Gateway
API データ
スキーマ 通信
プロトコル ノウハウ ・・・
・・・
HID
< 産業用ロボット < 非産業用ロボット Cloud
産業機器
ロボット革命(日) 第4次産業革命(独)
人工知能 例:KPIライブラリ

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
30/24 6.2 「そして第1次/第3次産業へ」
ORiN 3
第2次産業 第1次産業 第3次産業
[ORiN2の例] ・農業オートメーション (機械振興協会技術研究所)
[ORiN2の例] ・SCOT(スマート手術室/未来医療) (東京女子医大/AMED)
第2次産業で培ったノウハウを展開
・EMS/HEMS
ノウハウをさらにFBして発展
「ORiN3の開発も経産省の支援を受けられるよう,案件を検討中」
ORiN3 2020年完成を目指す!

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
31/24 まとめ
■ お願い
「ORiN2に対するコメントがあれば是非ORiN協議会へ連絡下さい!」
→ MUST項目はすぐに対応,WANT項目はORiN3で検討します!

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
32/24
ご清聴ありがとうございました!
http://www.orin.jp/
ORiN協議会

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
33/24 [参考] ORiNのISO活動
• TC184/SC5(FA)からの打診に応じ,ISO 20242(装置接続インタフェース)のAnnex(実装例)掲載を 目指し,ISO WGに提案.
• 2011年12月にIS(正式国際規格)化
■ さらに,現在はISO 16100他にも対応.

http://www.orin.jp/ Copyright© 2003-2015 the Japan Robot Association, All rights reserved.
34/24 [参考] アーキテクチャ比較(OPC)
ORiN, ISO 20242 :
■ 基本的な思想
「共通モジュール(エンジン/コーディネータ)を置
くことで他標準との連携を容易にしたい」
→[背景] FAの世界はOAと違い様々な規格が
長期間に渡って存在する.
共通モジュール有り
Part 3
CRD
Part 4
Part 5 連携
ORiN (日)
OPC (米)
共通モジュール無し
ISO 20242 (独)
Top Related