







Languages
Pages
Legal


Infrared Thermal Camera-Based Real-Time Identification and Tracking of Large Animals
to Prevent Animal-Vehicle Crashes(AVCs) On Roadways
Debao Zhou
Department of MIE, UMDApril 18, 2023
Objective
To build a system on roadside to automatically detect the presence of large animals, such as deer, and track their motions for the safe driving on roadways
This system can also be installed on cars

Heated objects
Cars at low/high speed
Animals on road
Animals off roadHeated objects
Animals off road
The Problem – Where Are Animals

The Problem – Road Conditions
4
Tree and/or grass, Straight or curved Hill or ditch
Tree
Grass
RoadTree
TreeTree
Road
Hills
Road
or ditches
Case 1 Case 2
Road
Case 3
Case 4
Grass

Thermal Camera Capability Temperature sensitivity: up to 14 mK Optical resolution up to 640 by 480 TV Lines Activity detection of adult human size objects
up to 8 Km with motorized focal length adjustment
Active IR thermal camera and passive IR thermal camera

Example: Thermal-Eye 3620AS camera core:
FOV 17 Range to detect human activity: 1000ft (305m) Real-time 30fps -20°C to 85°C $3500

Technical Approach Through the processing of infrared thermal images to
detect and track big animals Speed method will be used to distinguish big animals from
their environment and high speed cars Pattern matching method will be used to identify big animals
from low speed cars Centroid method will be used to track the motion of big
animals
A mechatronic system with two degrees of freedom will be developed to realize the scanning and tracking by making the camera point to a specific animal 7
Advantages
8
Advantages • Automatic detection and tracking
• All-time – day and night
• Coverage area much bigger than break-the-beam method
Usage:• On-vehicle
• Roadside for infrastructure

Accomplishments To Date Infrared thermal images have been acquired and
analyzed. The results shows that these images can be used to identify the presence of big animals and cars.
Pattern matching method has been applied to identify the presence of cars and deer. The algorithm is capable to tell the object is a deer or a car.
Tracking has been realized using two degrees of freedom system.
A prototype has been built and the scanning and tracking have been realized.
9

System Prototype
10
• Camera and image grabbing
• Stepper motors• Enclosure:
Contain power supply and motion controller
• Computer
Identification and Tracking Realization
11
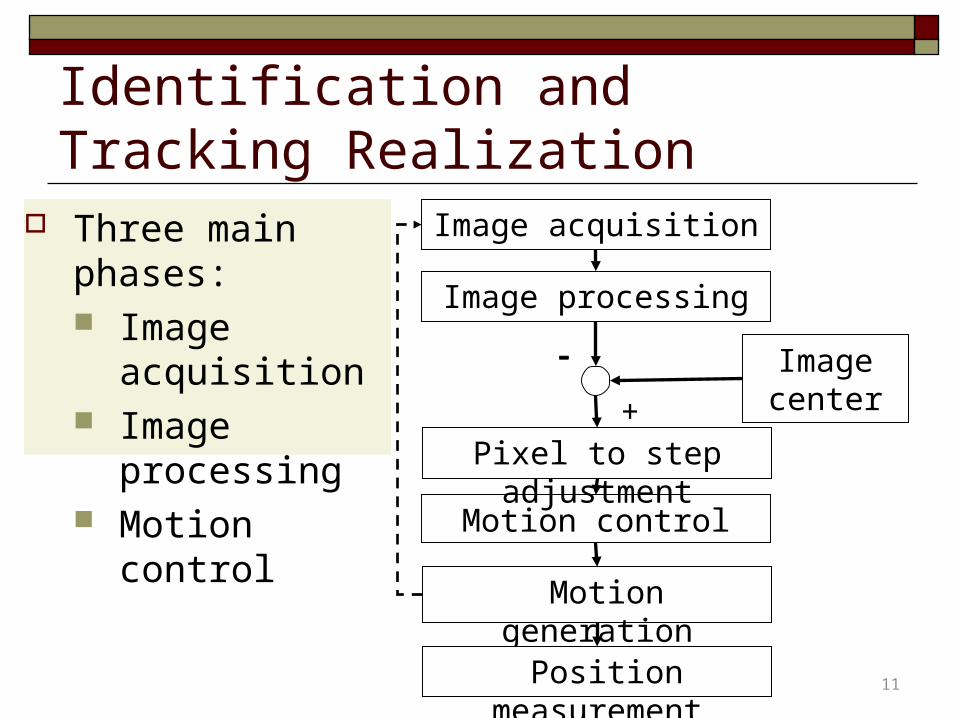
Image acquisition
Image processing
Motion control
Motion generation
Position measurement
Pixel to step adjustment
+
Image center
Three main phases: Image acquisition Image processing Motion control
Motion Control and Realization
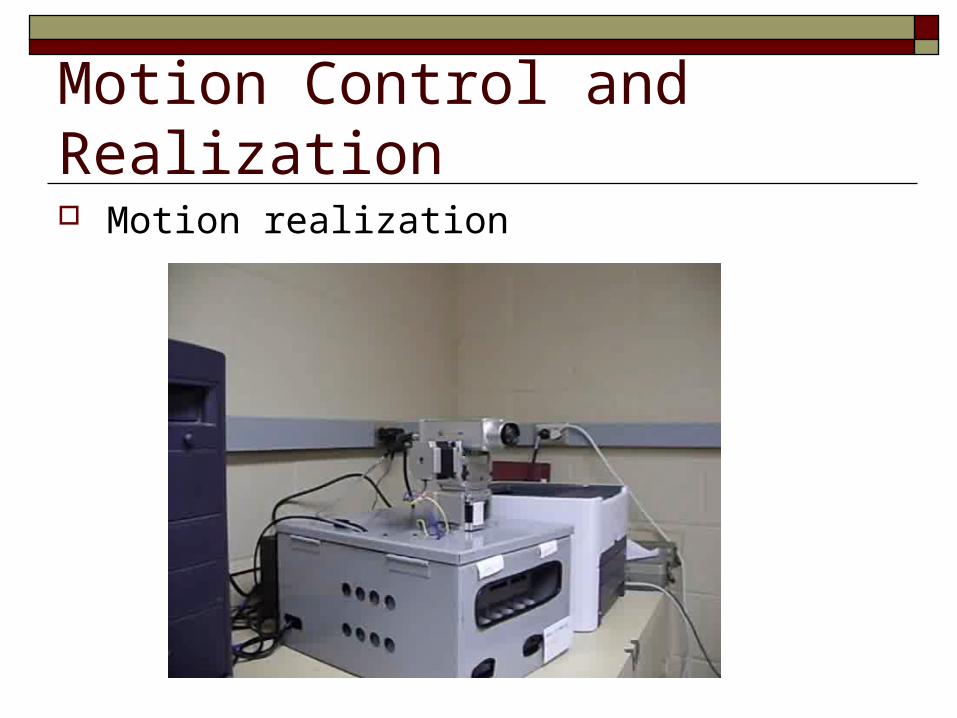
Motion realization
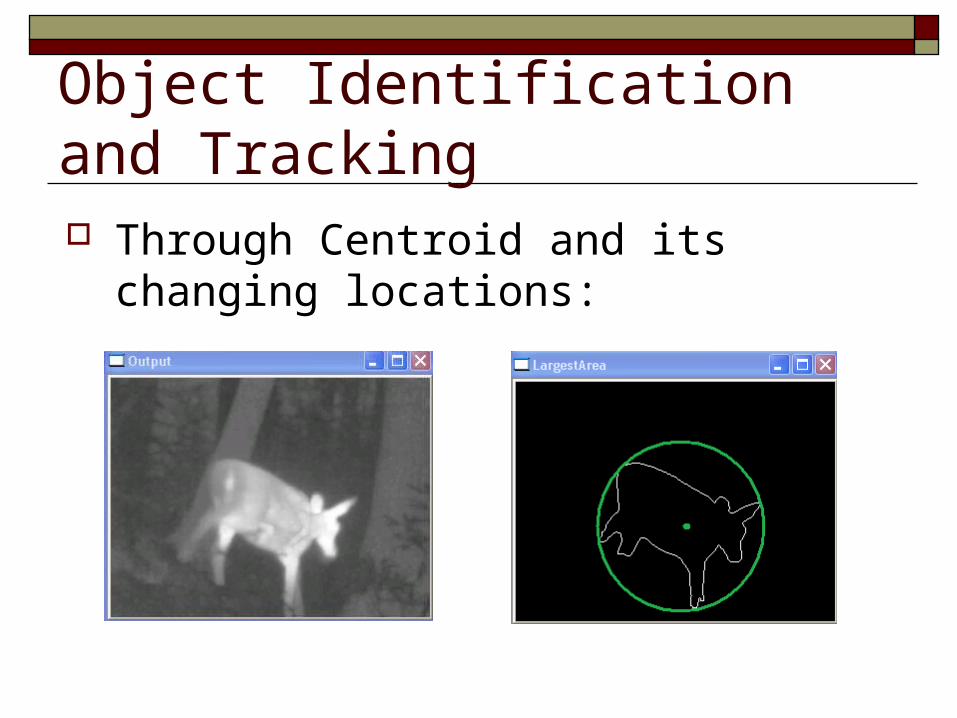
Object Identification and Tracking
Through Centroid and its changing locations:

Pattern Matching: Car and Big-animals
Original Patterns
Original Images
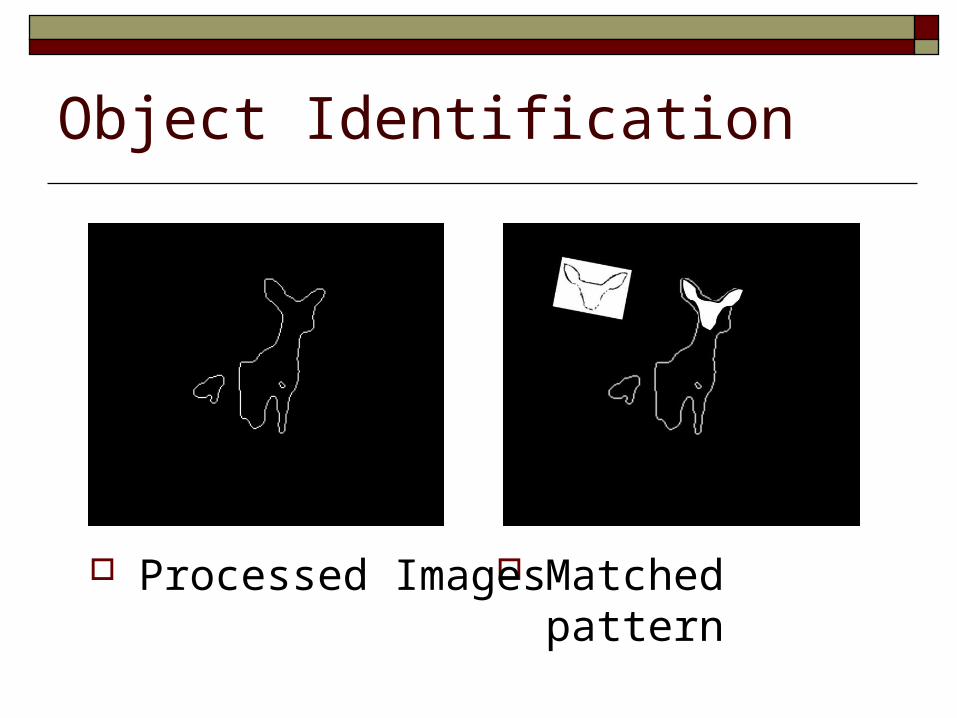
Object Identification
Matched pattern Processed Images
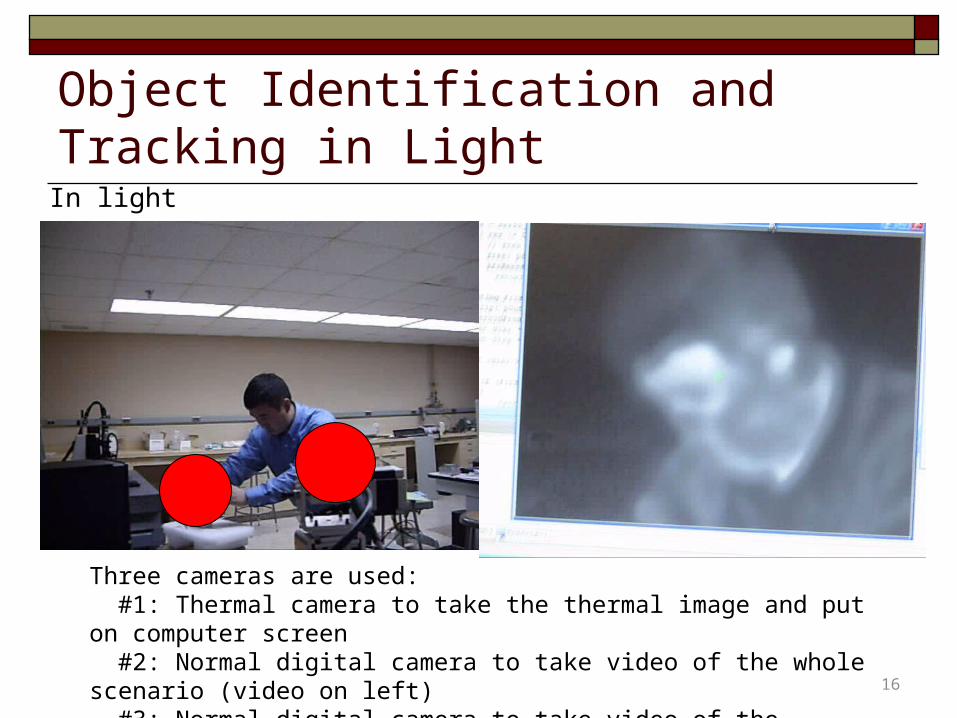
Object Identification and Tracking in Light
16
Three cameras are used: #1: Thermal camera to take the thermal image and put on computer screen #2: Normal digital camera to take video of the whole scenario (video on left) #3: Normal digital camera to take video of the computer screen (video on right)
In light
17
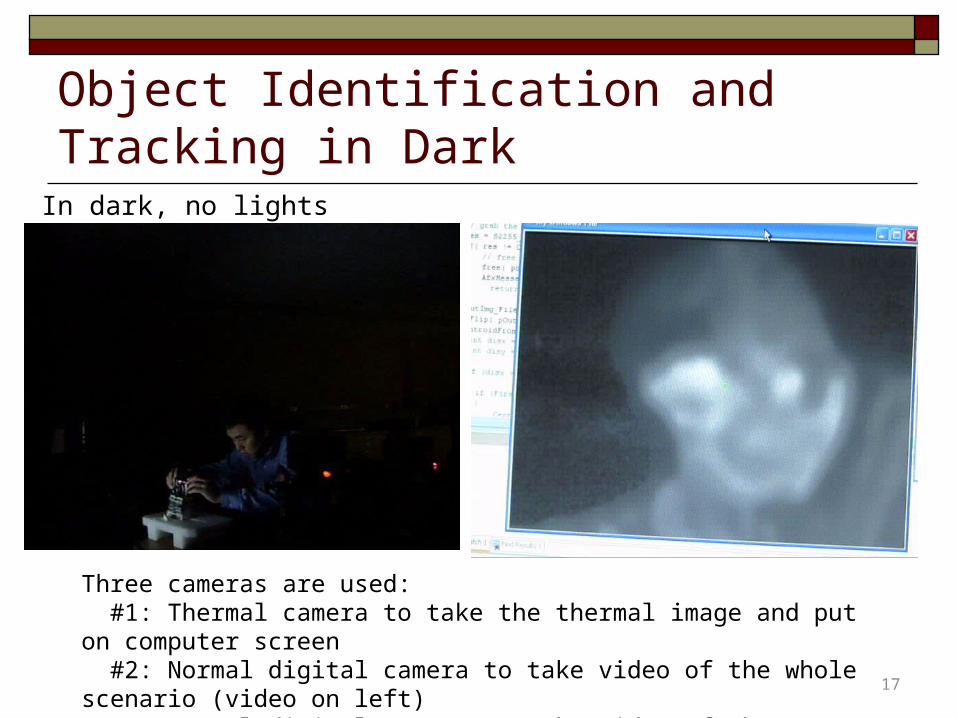
Object Identification and Tracking in Dark
Three cameras are used: #1: Thermal camera to take the thermal image and put on computer screen #2: Normal digital camera to take video of the whole scenario (video on left) #3: Normal digital camera to take video of the computer screen (video on right)
In dark, no lights
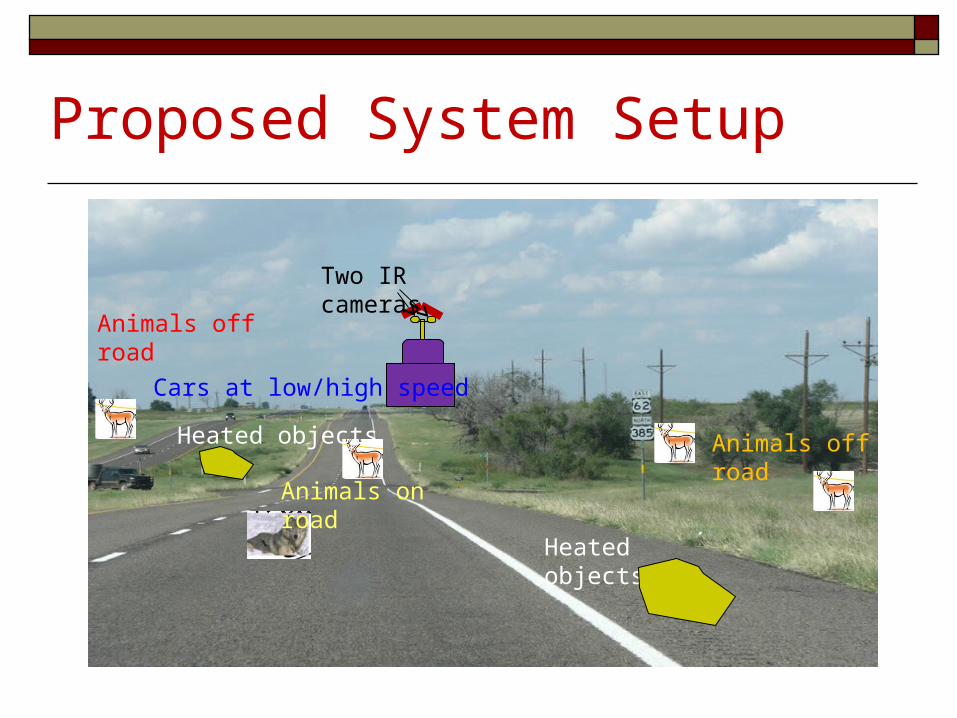
Proposed System Setup
Two IR cameras
Heated objects
Cars at low/high speed
Animals on road
Animals off roadHeated objects
Animals off road

Proposed Study Speed measurement:
3D distance measurement and distance change with time Off-road big-animal identification from stand-still objects On-road high-speed vehicles identification
Development of pattern matching algorithms On-road low speed vehicles identification - tell cars from
any big animals when car moves in slow speed Multiple objects tracking Building robust system: electrical, mechanical, suitable
for roadside application, low-high temperature, etc.19

Thanks!
20



Review: On-vehicle / Roadside Natural habitat prevention Roadside vegetation control Electronic mats Population reduction Fencing Deer guards and crosswalks Underpasses and overpasses Roadside reflectors Animal reflectors Flash light sensing IR LASER
24
The Driver Whistles TH-HID Lighting System Forward-collision Sensors Ultrasonic Sensors Radar Camera Auto-identification of humans
in the environment,
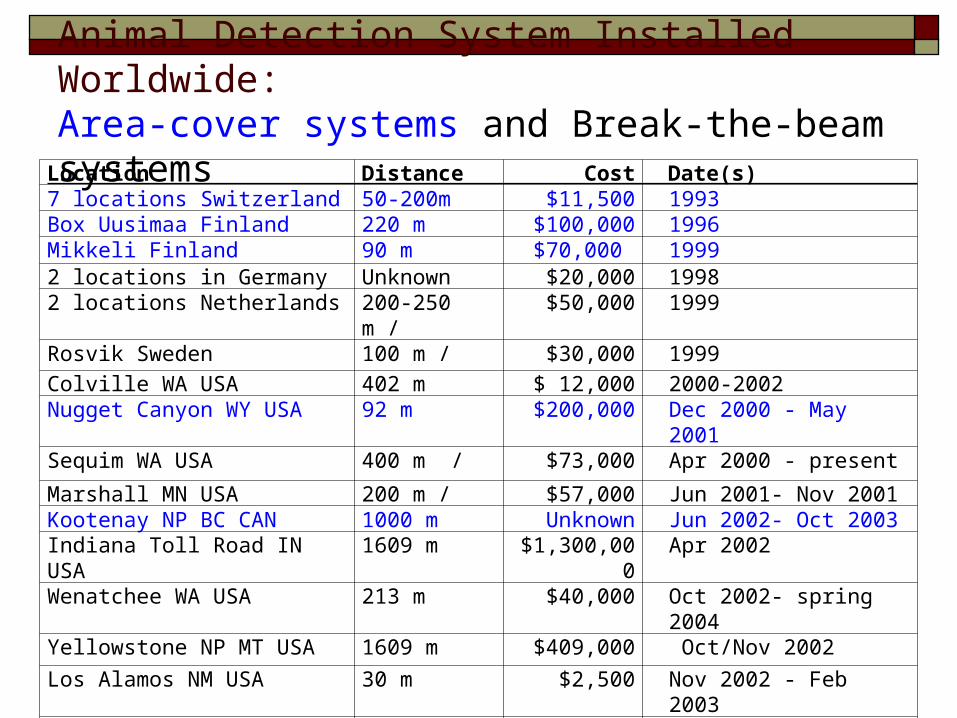
Animal Detection System Installed Worldwide: Area-cover systems and Break-the-beam systemsLocation Distance Cost Date(s)7 locations Switzerland 50-200m $11,500 1993Box Uusimaa Finland 220 m $100,000 1996Mikkeli Finland 90 m $70,000 19992 locations in Germany Unknown $20,000 19982 locations Netherlands 200-250 m / $50,000 1999
Rosvik Sweden 100 m / $30,000 1999Colville WA USA 402 m $ 12,000 2000-2002Nugget Canyon WY USA 92 m $200,000 Dec 2000 - May 2001Sequim WA USA 400 m / $73,000 Apr 2000 - present
Marshall MN USA 200 m / $57,000 Jun 2001- Nov 2001Kootenay NP BC CAN 1000 m Unknown Jun 2002- Oct 2003Indiana Toll Road IN USA 1609 m $1,300,000 Apr 2002 Wenatchee WA USA 213 m $40,000 Oct 2002- spring 2004Yellowstone NP MT USA 1609 m $409,000 Oct/Nov 2002
Los Alamos NM USA 30 m $2,500 Nov 2002 - Feb 2003Thompson-town PA USA 91 m / $220,000 May 2004 - Jan 2005Herbertville Quebec CAN 10 m / $8,200 Fall 2004

IR System and Warning Signs in Netherlands

System in Calville, WA, USA – Break-the-beam System
20 June 2000 Hwy 395 north of Spokane,
south of Colville Two lasers, one placed on
each side of the road Two standard deer warning
signs, two smaller rectangular signs that read “When Flashing”, and two solar powered red flashing beacons
Lasers operated on batteries Problems:
Clear line-of-sight in the right-of-way
Heat in the box

FLASH System in Nugget Canyon WY USA, IR Sensor (17m-19m)
Flashing Light Animal Sensing Host (FLASH)
Series of infrared sensors placed at 17-19 m (18.5-20.7 yd) intervals, HW 30; spanned 92m
Body heat of large animals
Signs were placed 300 m (327 yd) before the crossing area
Sing read:

System in Yellowstone National Park, Montana USA (Break-the-beam)
Oct./Nov. 2002; Along a 1,609 m (1 mi) long road section of
US Hwy 191 Transmitter: microwave RF signal (35.5
GHz) to its intended Receiver Once actived, master station then sends the
beacon-on command to the nearest beacons

System in Yellowstone National Park, Montana USA (Break-the-beam)


• Cannot detect the distance/speed of a moving object• Cannot distinguish moving animals from moving cars• Cannot distinguish sun-heated objects from big-
animals • Cannot be able to tell that a fast running animal will
enter the road.
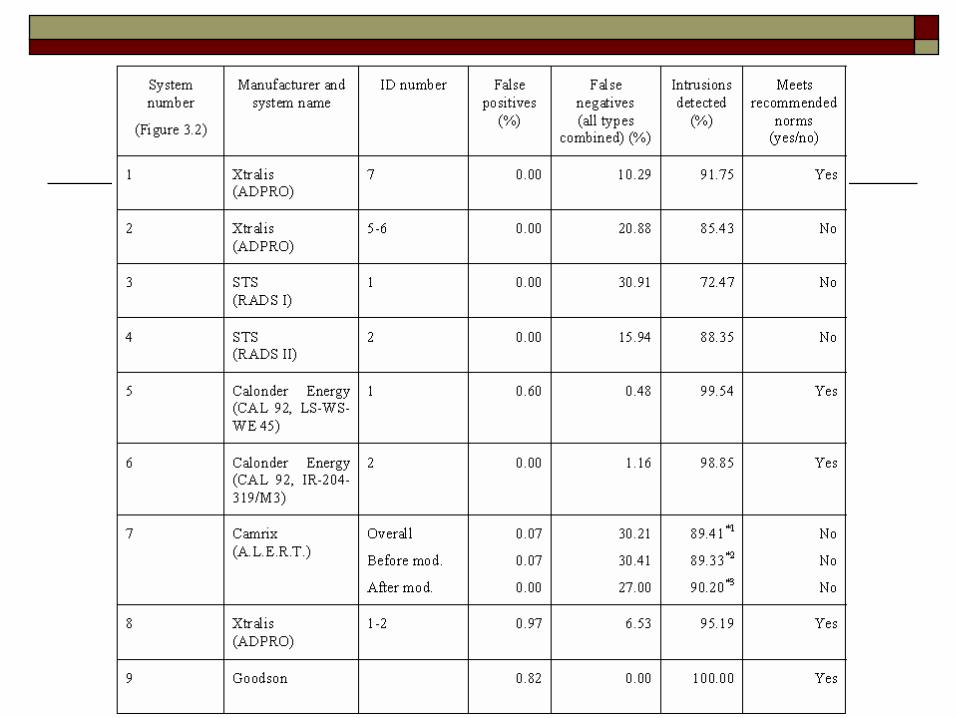
• Intrusion detection rate is not acceptable• Camrix A.L.E.R.T and Xtralis ADPRO

Infrared Cameras for Monitoring Animal Activity Thermacam B1; FLIR (forward-looking infrared) Systems
Inc; Boston, Massachusetts Trailmaster 1500 Active Infrared Trail Monitors; By Goodson
and Associates, Inc.; Lenexa, Kansas FLIR Nightsight Palm IR 250 Digital Camera; Raytheon,
Waltham, MA TM-2500 Trailmonitor; Grypon Engineering, Inc.; Richmond,
Michigan Su320ktx-1.7rt; Goodrich Corporation; Princeton, New
Jersey Hunting Electronics / Military Usage
36

Capability of Infrared Cameras
Distance, from up to 8 Km for the identification of adult human size objects
Temperature: -40F to 100F Resolution: 0.1F

Component Integration
38
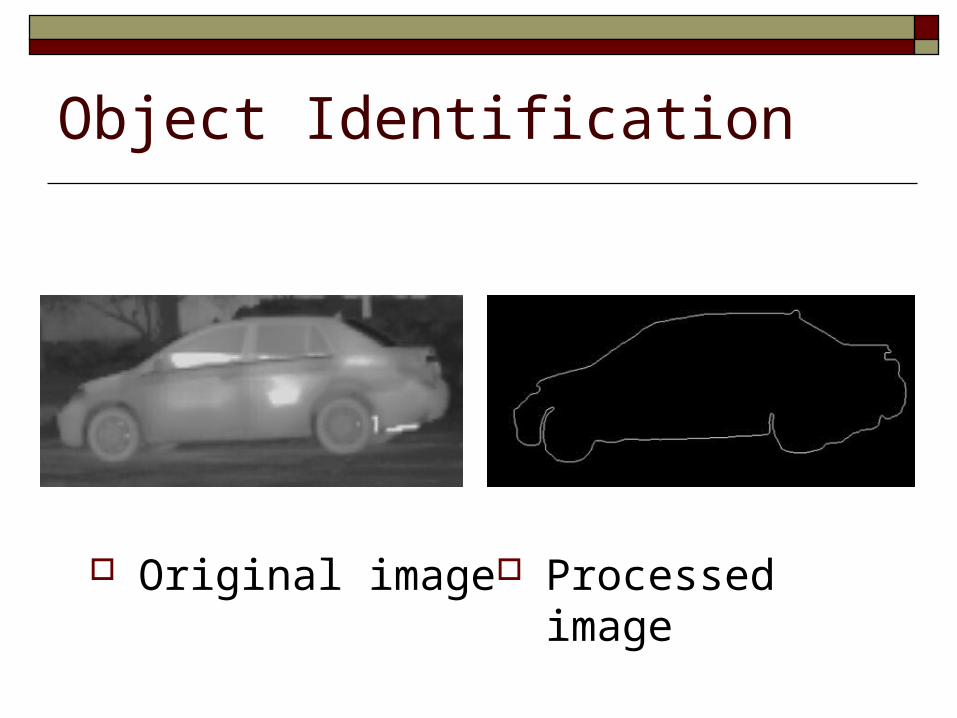
Object Identification
Processed image Original image
Top Related