







Languages
Pages
Legal

1A – 2006-2007 – J. Delamare (diapositive N°1)
I Champs tournants
1A – 2006-2007 – J. Delamare (diapositive N°2)
Champ créé par un courant

1A – 2006-2007 – J. Delamare (diapositive N°3)
Champ créé par une phase• Champ pulsant
1A – 2006-2007 – J. Delamare (diapositive N°4)
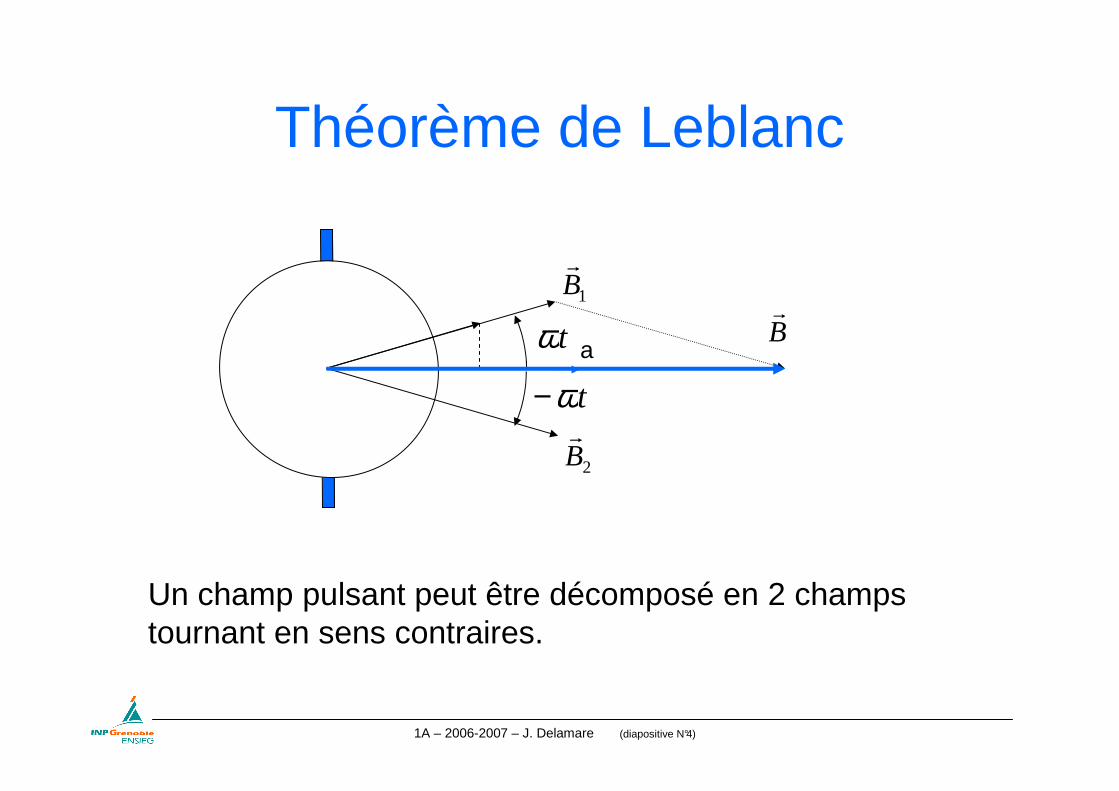
Théorème de Leblanc
1Br
atω
tω−
2Br
Br
Un champ pulsant peut être décomposé en 2 champs tournant en sens contraires.

1A – 2006-2007 – J. Delamare (diapositive N°5)
Champ créé par une phase• Théorème de Leblanc
1A – 2006-2007 – J. Delamare (diapositive N°6)
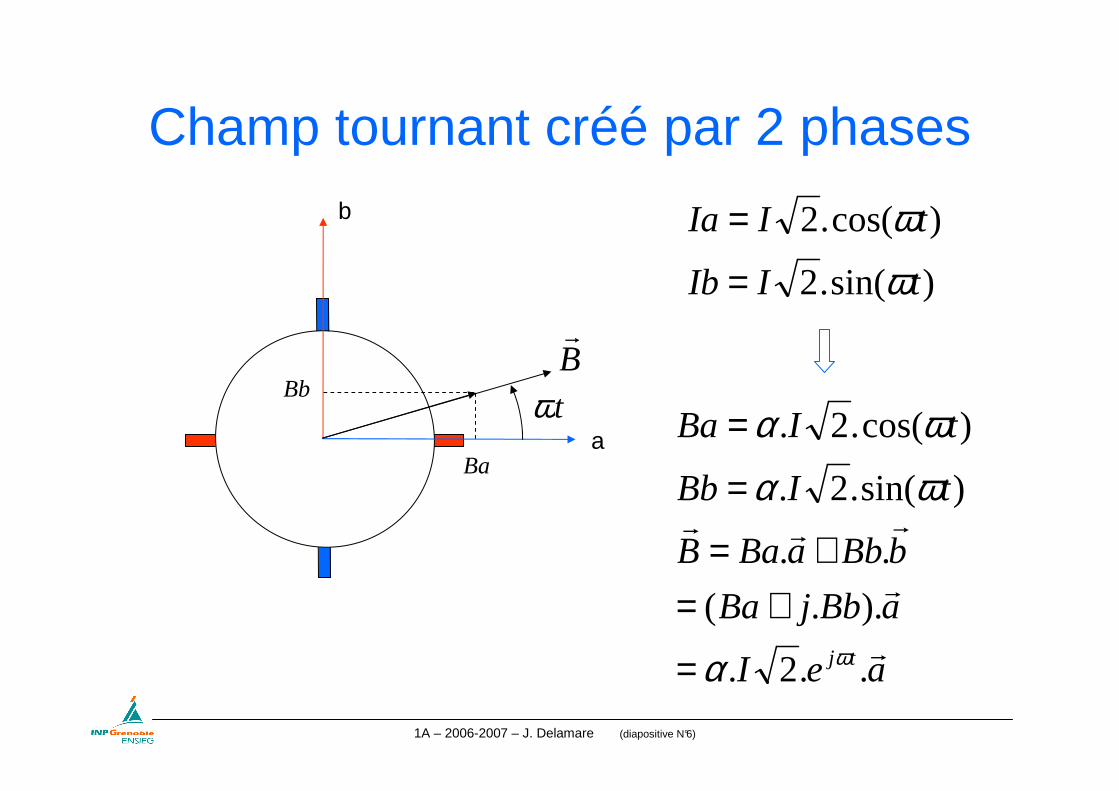
Champ tournant créé par 2 phases
Br
a
b
)sin(.2
)cos(.2
tIIb
tIIa
ωω
=
=
tω
aeI
aBbjBa
bBbaBaB
tIBb
tIBa
tj r
r
rrr
..2.
)..(
..
)sin(.2.
)cos(.2.
ωα
ωαωα
=
+=+=
=
=Ba
Bb
1A – 2006-2007 – J. Delamare (diapositive N°7)
Champ tournant créé deux bobines
1A – 2006-2007 – J. Delamare (diapositive N°8)
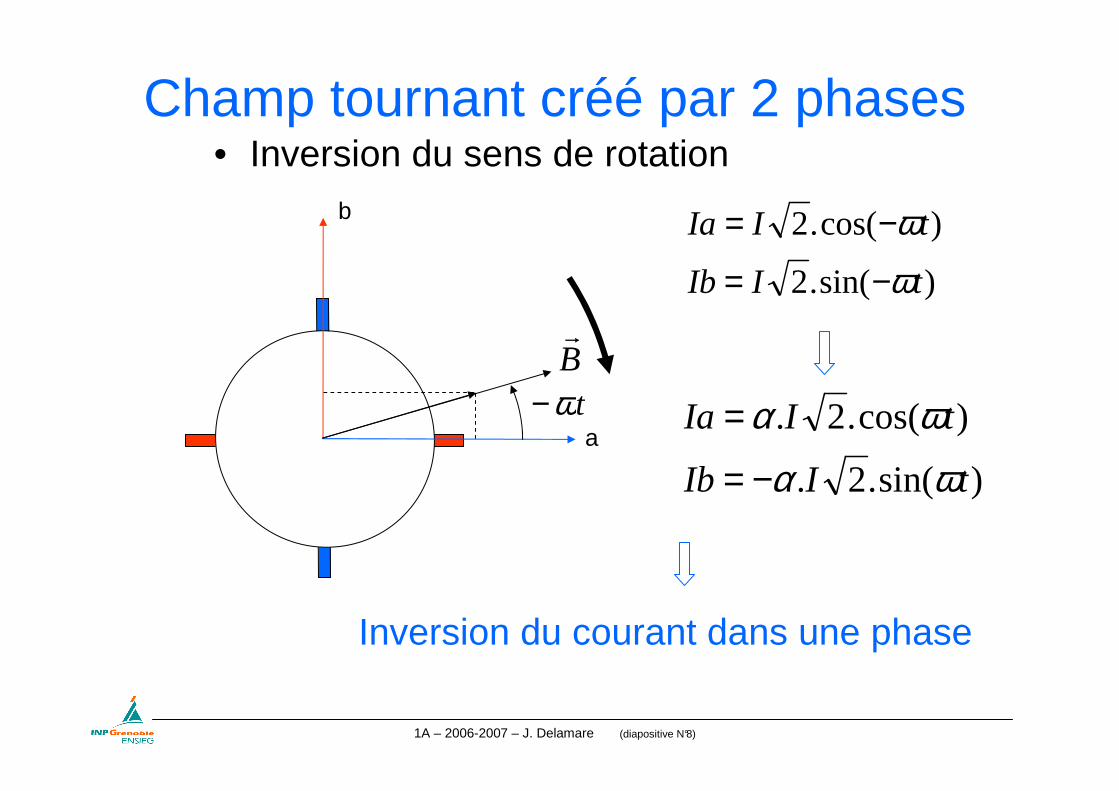
Champ tournant créé par 2 phases
Br
a
b
)sin(.2
)cos(.2
tIIb
tIIa
ωω
−=
−=
tω−
)sin(.2.
)cos(.2.
tIIb
tIIa
ωαωα
−=
=
• Inversion du sens de rotation
Inversion du courant dans une phase

1A – 2006-2007 – J. Delamare (diapositive N°9)
Champ tournant créé 2 phases• Inversion du sens de rotation
1A – 2006-2007 – J. Delamare (diapositive N°10)
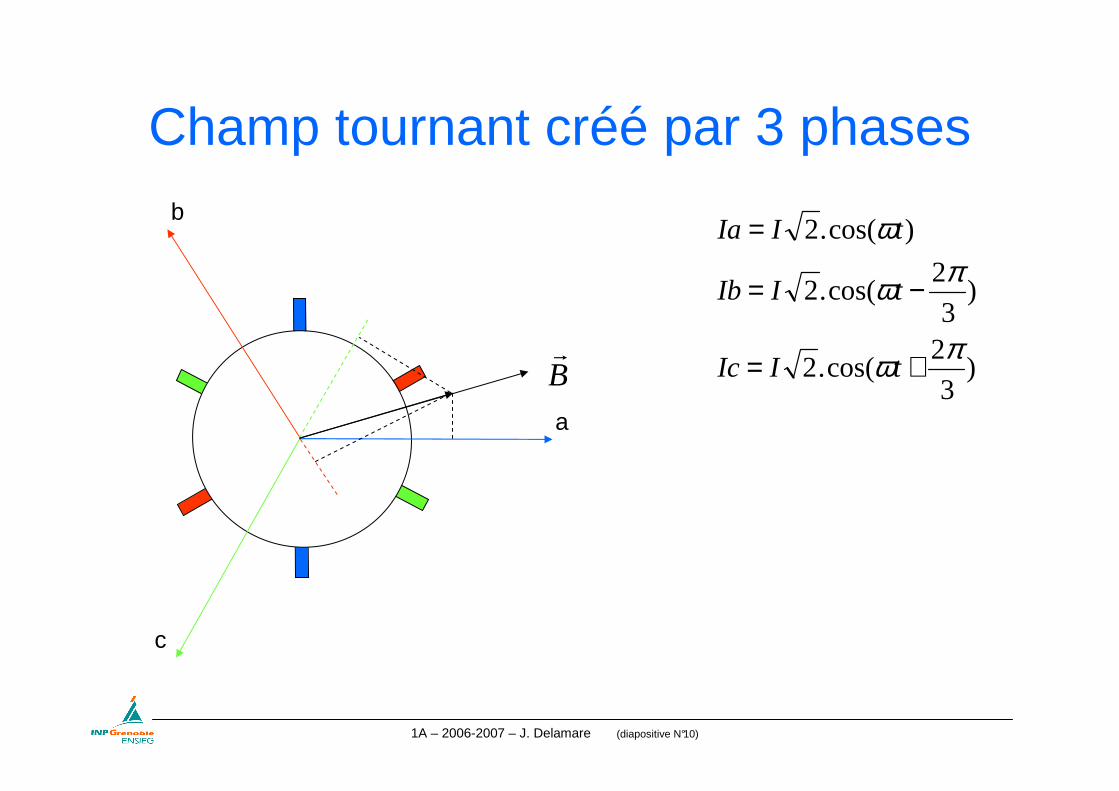
Champ tournant créé par 3 phases
)3
2cos(.2
)3
2cos(.2
)cos(.2
πω
πω
ω
+=
−=
=
tIIc
tIIb
tIIa
c
a
b
Br
1A – 2006-2007 – J. Delamare (diapositive N°11)
Champ tournant créé trois par 3 phases
1A – 2006-2007 – J. Delamare (diapositive N°12)
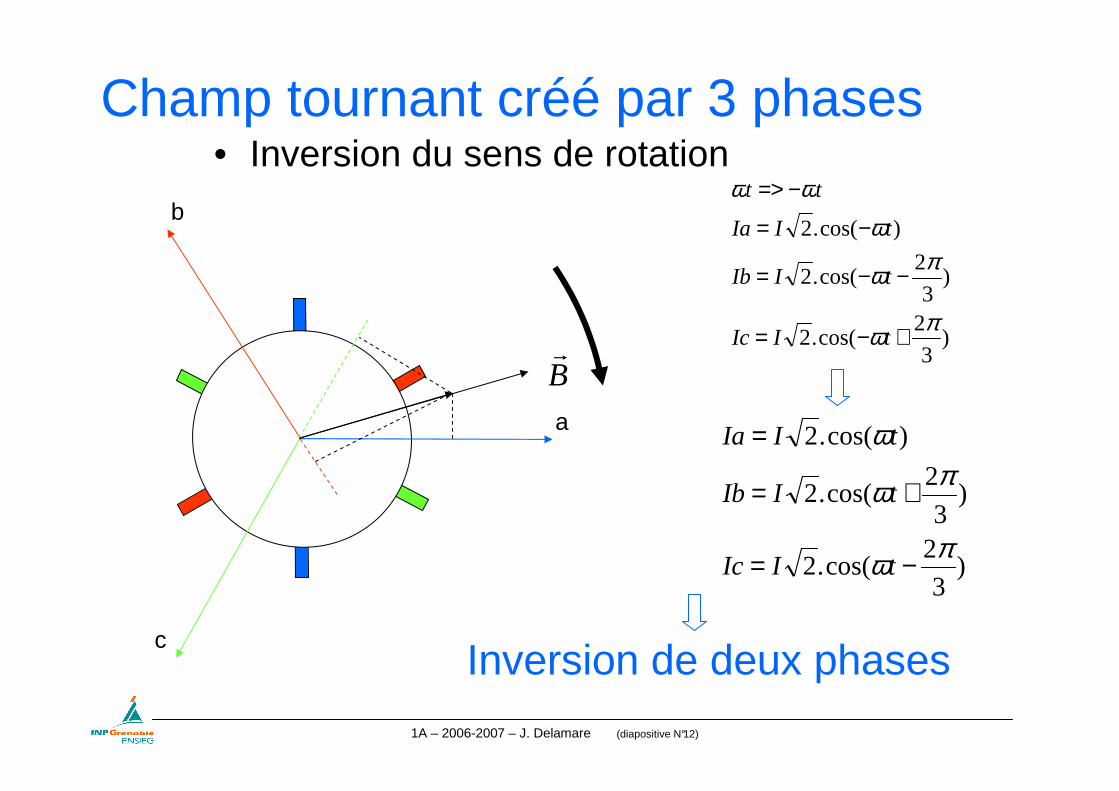
Champ tournant créé par 3 phases
)3
2cos(.2
)3
2cos(.2
)cos(.2
πω
πω
ωωω
+−=
−−=
−=
−=>
tIIc
tIIb
tIIa
tt
c
a
b
Br
• Inversion du sens de rotation
)3
2cos(.2
)3
2cos(.2
)cos(.2
πω
πω
ω
−=
+=
=
tIIc
tIIb
tIIa
Inversion de deux phases

1A – 2006-2007 – J. Delamare (diapositive N°13)
Champ tournant créé par 3 phases• Inversion du sens de rotation
Inversion de deux phases
1A – 2006-2007 – J. Delamare (diapositive N°14)
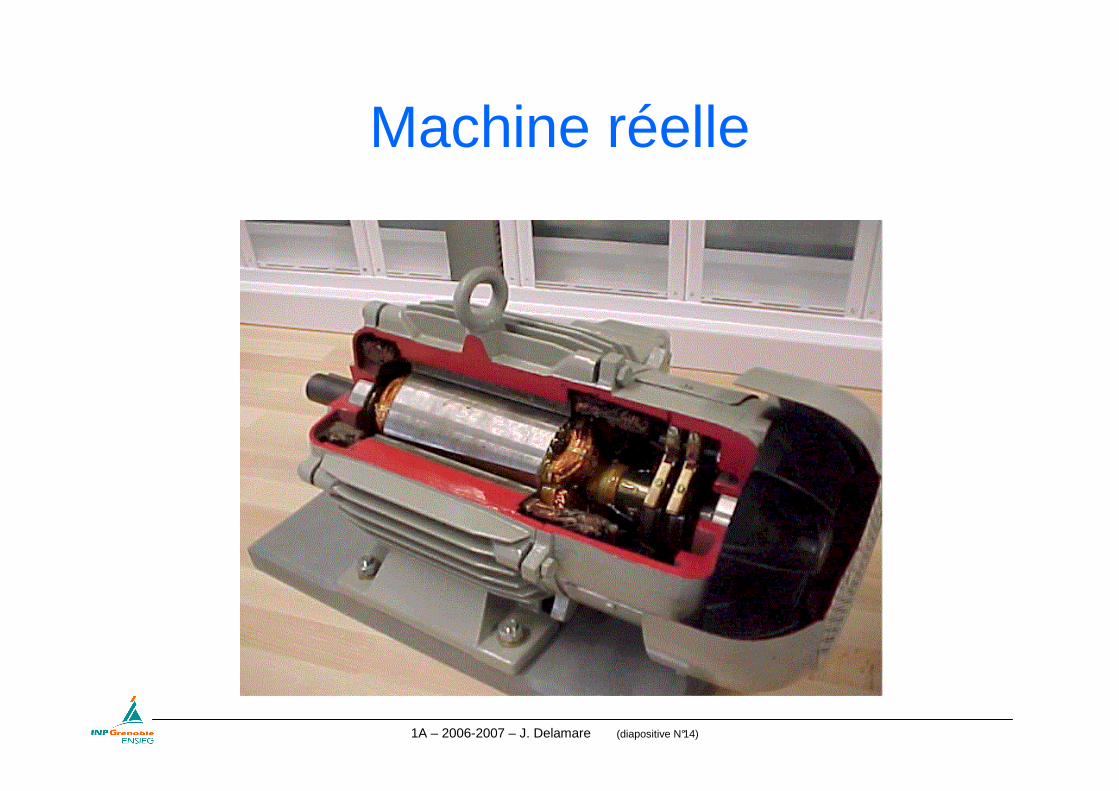
Machine réelle
1A – 2006-2007 – J. Delamare (diapositive N°15)
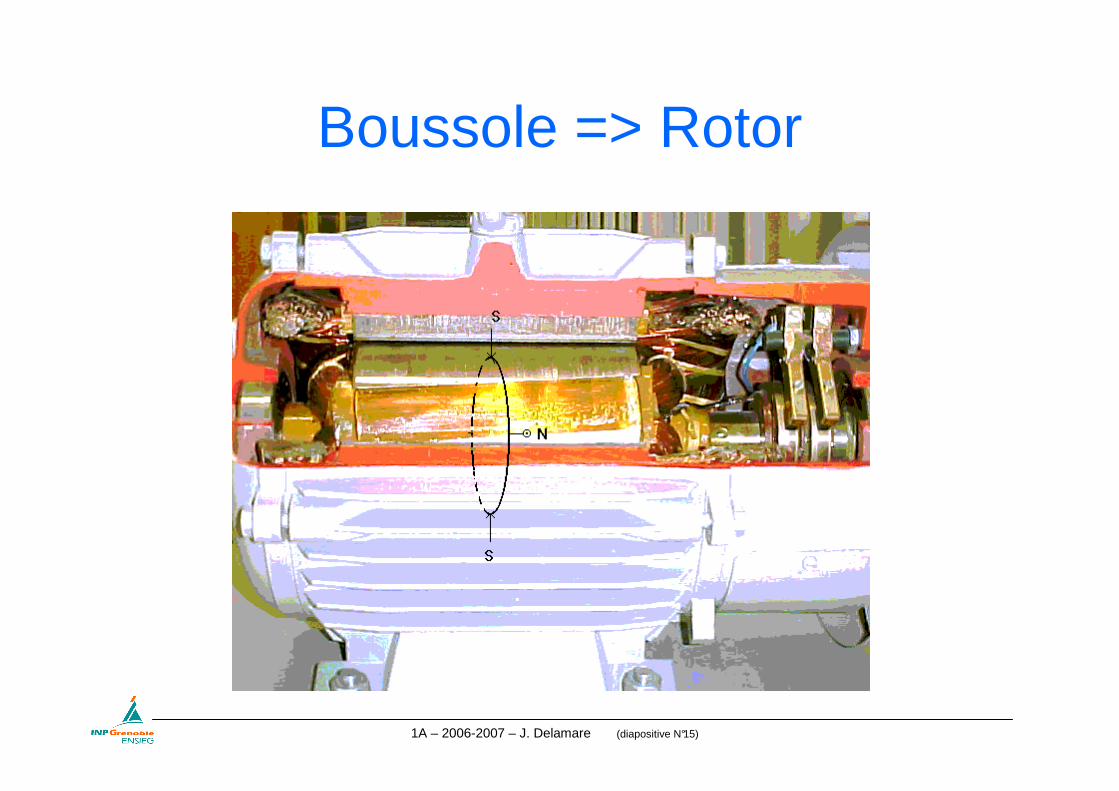
Boussole => Rotor
1A – 2006-2007 – J. Delamare (diapositive N°16)
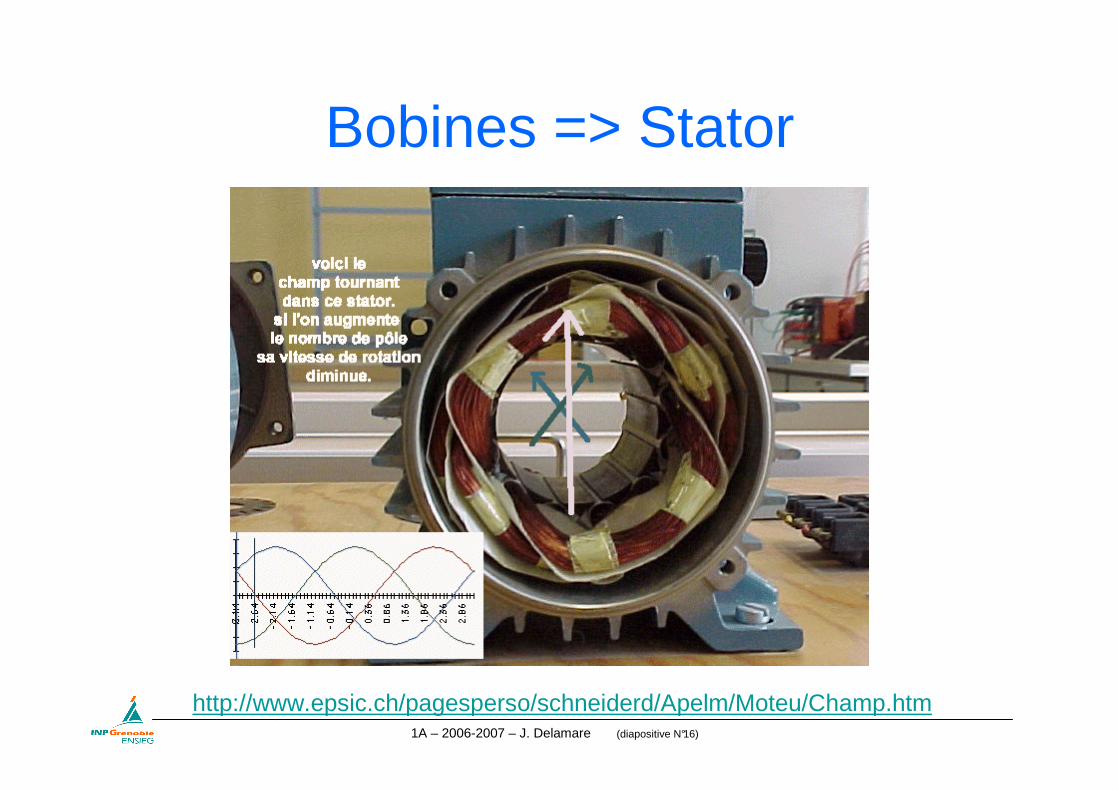
Bobines => Stator
http://www.epsic.ch/pagesperso/schneiderd/Apelm/Moteu/Champ.htm
1A – 2006-2007 – J. Delamare (diapositive N°17)
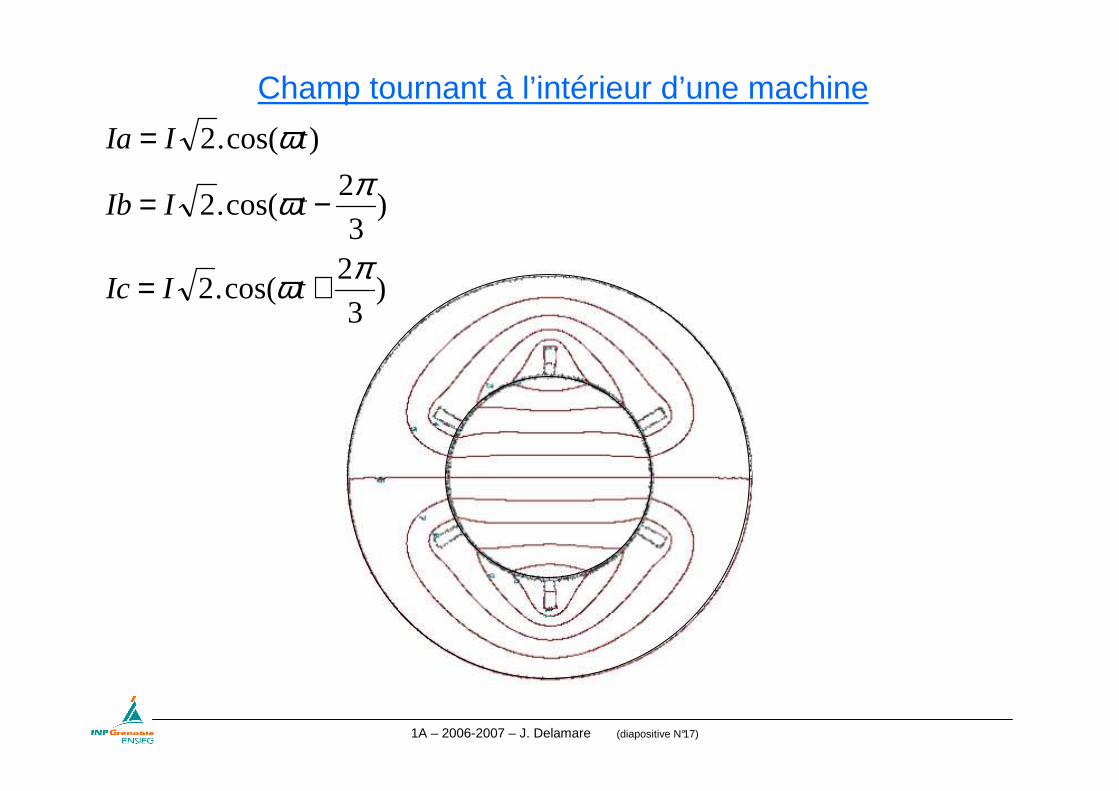
Champ tournant à l’intérieur d’une machine
)3
2cos(.2
)3
2cos(.2
)cos(.2
πω
πω
ω
+=
−=
=
tIIc
tIIb
tIIa
1A – 2006-2007 – J. Delamare (diapositive N°18)
Calcul des forces magnétomotrices :
1A – 2006-2007 – J. Delamare (diapositive N°19)
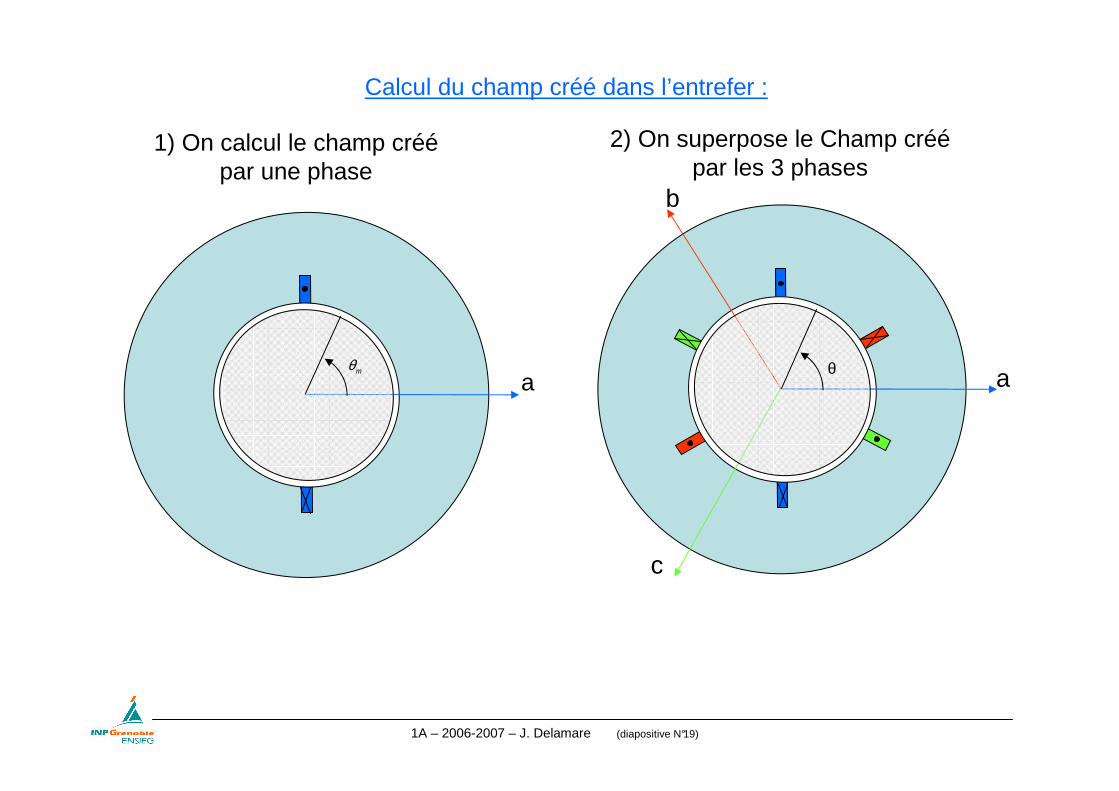
Calcul du champ créé dans l’entrefer :
amθ
a
b
c
θ
1) On calcul le champ créé par une phase
2) On superpose le Champ créé par les 3 phases
1A – 2006-2007 – J. Delamare (diapositive N°20)
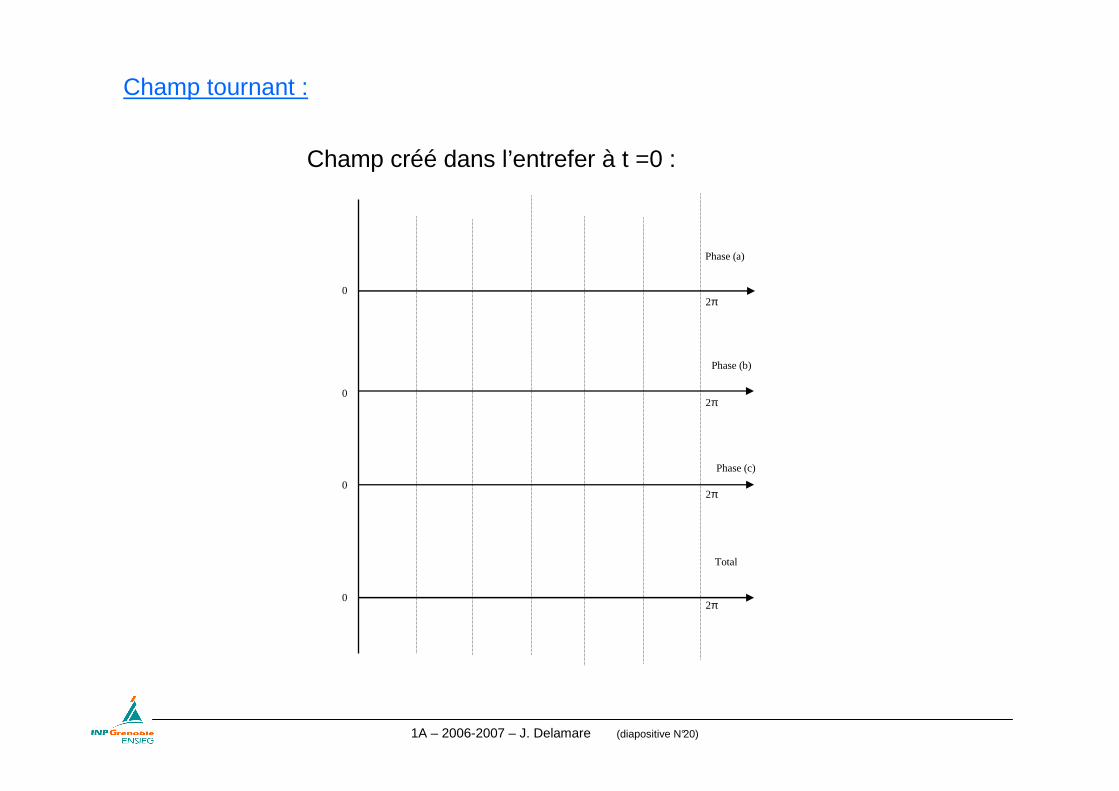
Champ tournant :
Champ créé dans l’entrefer à t =0 :
Phase (a)
Phase (b)
Phase (c)
Total
0
0
0
02π
2π
2π
2π
1A – 2006-2007 – J. Delamare (diapositive N°21)
Champ tournant :
Champ créé dans l’entrefer à ωt =π/2 :
Phase (a)
Phase (b)
Phase (c)
Total
0
0
0
02π
2π
2π
2π
1A – 2006-2007 – J. Delamare (diapositive N°22)
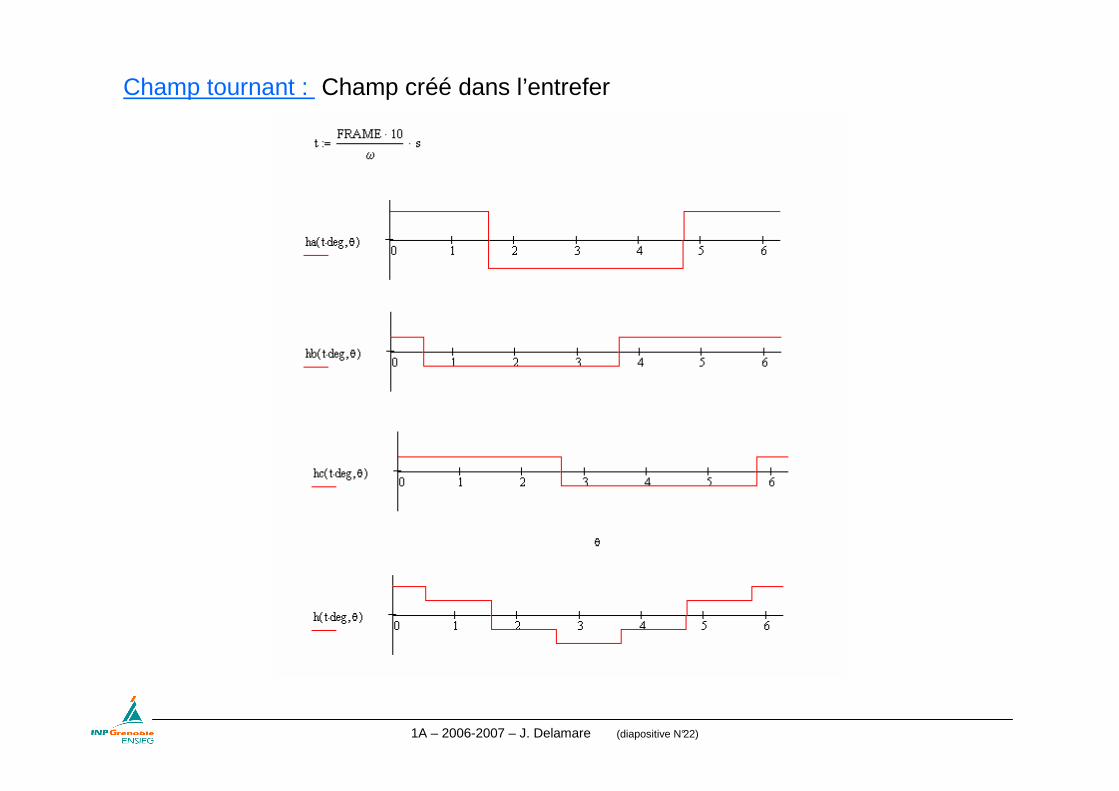
Champ tournant : Champ créé dans l’entrefer
1A – 2006-2007 – J. Delamare (diapositive N°23)
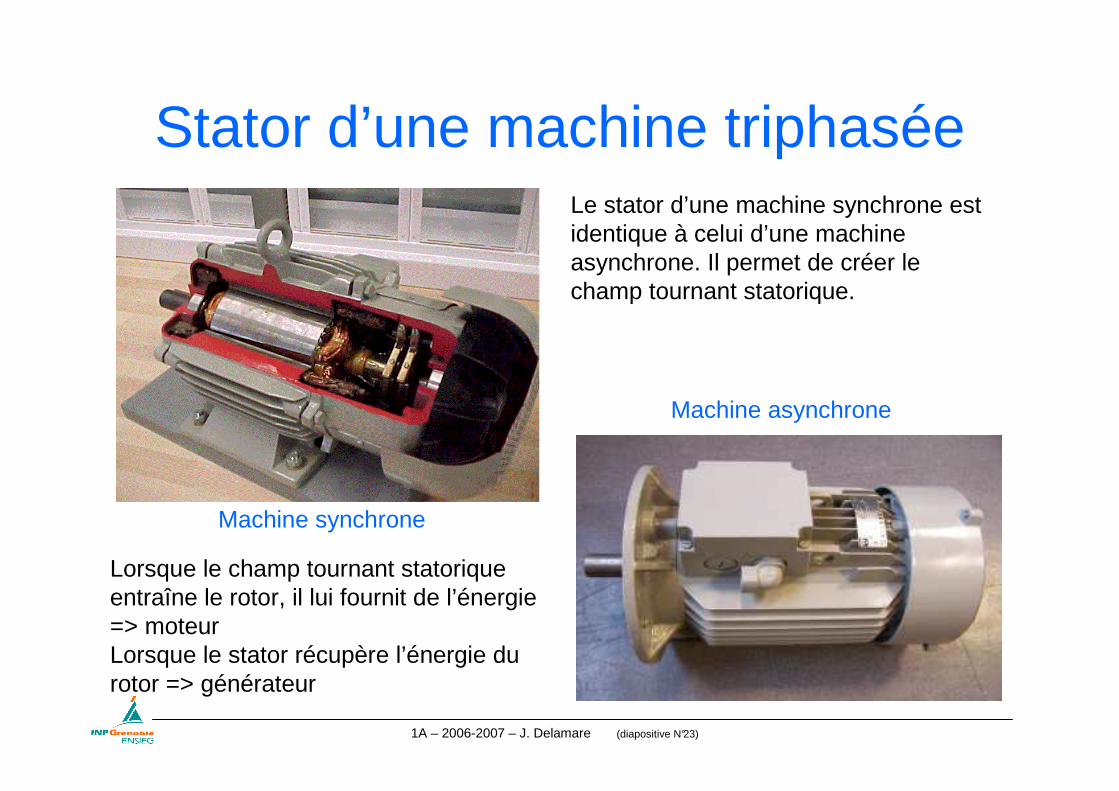
Stator d’une machine triphaséeLe stator d’une machine synchrone est identique à celui d’une machine asynchrone. Il permet de créer le champ tournant statorique.
Lorsque le champ tournant statoriqueentraîne le rotor, il lui fournit de l’énergie => moteurLorsque le stator récupère l’énergie du rotor => générateur
Machine synchrone
Machine asynchrone
1A – 2006-2007 – J. Delamare (diapositive N°24)
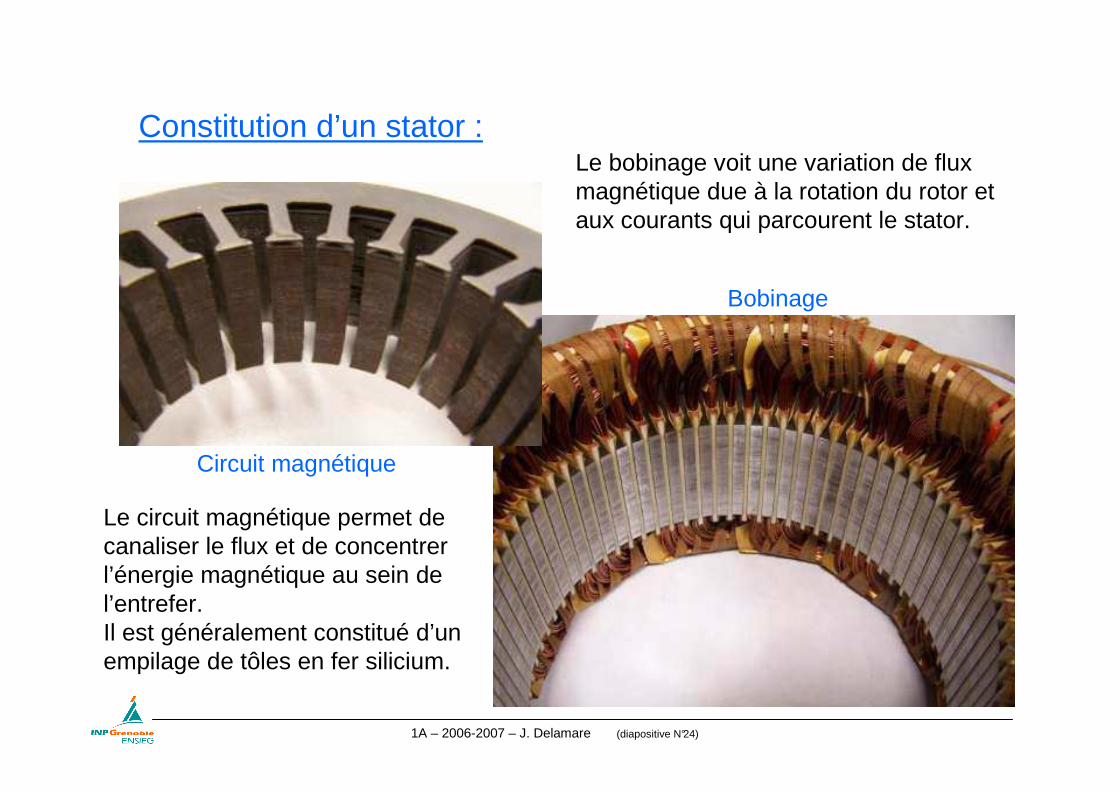
Constitution d’un stator :
Circuit magnétique
Bobinage
Le circuit magnétique permet de canaliser le flux et de concentrer l’énergie magnétique au sein de l’entrefer.Il est généralement constitué d’un empilage de tôles en fer silicium.
Le bobinage voit une variation de flux magnétique due à la rotation du rotor et aux courants qui parcourent le stator.
1A – 2006-2007 – J. Delamare (diapositive N°25)
Définitions :
• Force électromotrice (FEM) : tension induite aux bornes d’une bobine statorique lorsque le moteur fonctionne à vide (courants statoriques nuls). Cette tension est due à la variation de flux créée par le rotor dans la bobine.
• Inductance propre : Inductance propre d’une phase. Inductance créée par le flux d’une phase sur cette même phase. Inductance obtenue en pratique quand les autres phases ne sont pas alimentées. Cette inductance est peu utilisée car en pratique, une phase voit à la soit son propre flux et celui des autres phases.
• Inductance cyclique : Inductance d’une phase due à son propre flux et au flux des autres phases. C’est cette inductance qui est généralement employée.
• Résistance statorique : Résistance d’une phase du stator. Dans les machines « conventionnelles » cette résistance est généralement faible devant l’impédance de l’inductance cyclique.
1A – 2006-2007 – J. Delamare (diapositive N°26)
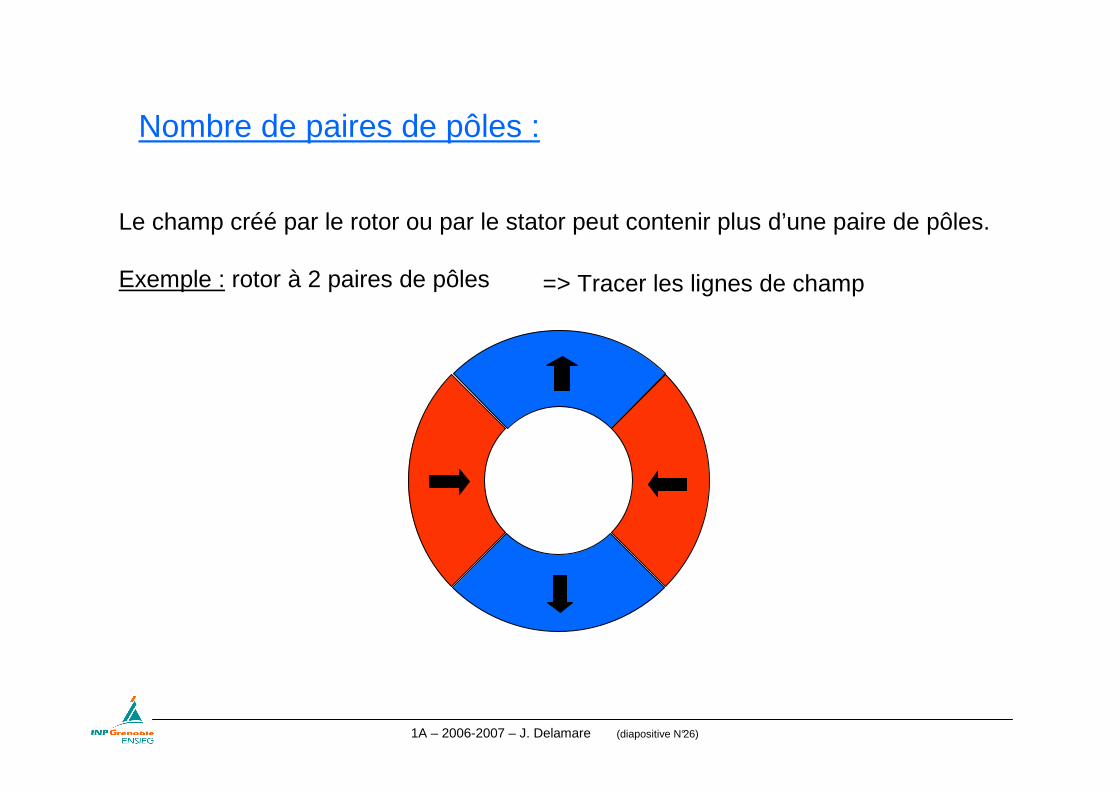
Nombre de paires de pôles :
Le champ créé par le rotor ou par le stator peut contenir plus d’une paire de pôles.
Exemple : rotor à 2 paires de pôles => Tracer les lignes de champ
1A – 2006-2007 – J. Delamare (diapositive N°27)
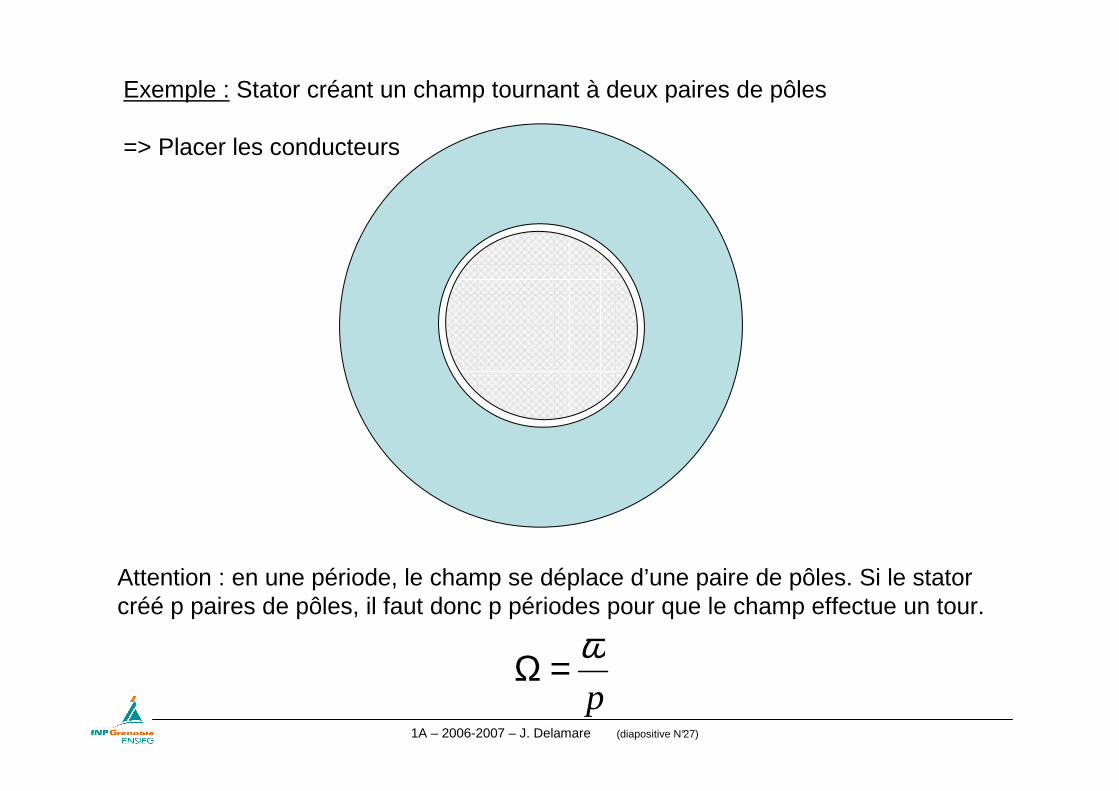
Exemple : Stator créant un champ tournant à deux paires de pôles
=> Placer les conducteurs
Attention : en une période, le champ se déplace d’une paire de pôles. Si le stator créé p paires de pôles, il faut donc p périodes pour que le champ effectue un tour.
p
ω=Ω
1A – 2006-2007 – J. Delamare (diapositive N°28)
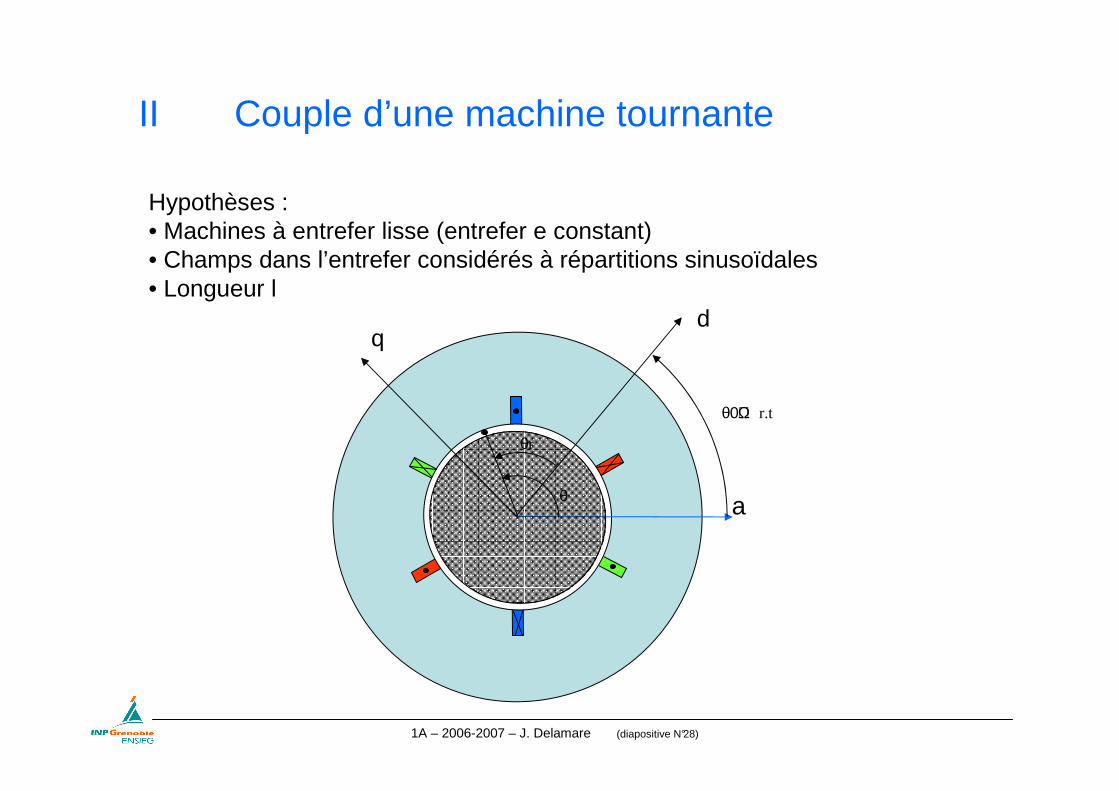
II Couple d’une machine tournante
Hypothèses :• Machines à entrefer lisse (entrefer e constant)• Champs dans l’entrefer considérés à répartitions sinusoïdales• Longueur l
a
dq
θ
θ0+Ωr.t
θr
1A – 2006-2007 – J. Delamare (diapositive N°29)
Calcul du couple d’une machine tournante
1A – 2006-2007 – J. Delamare (diapositive N°30)
couple d’une machine tournante
Exemple maquette
1A – 2006-2007 – J. Delamare (diapositive N°31)
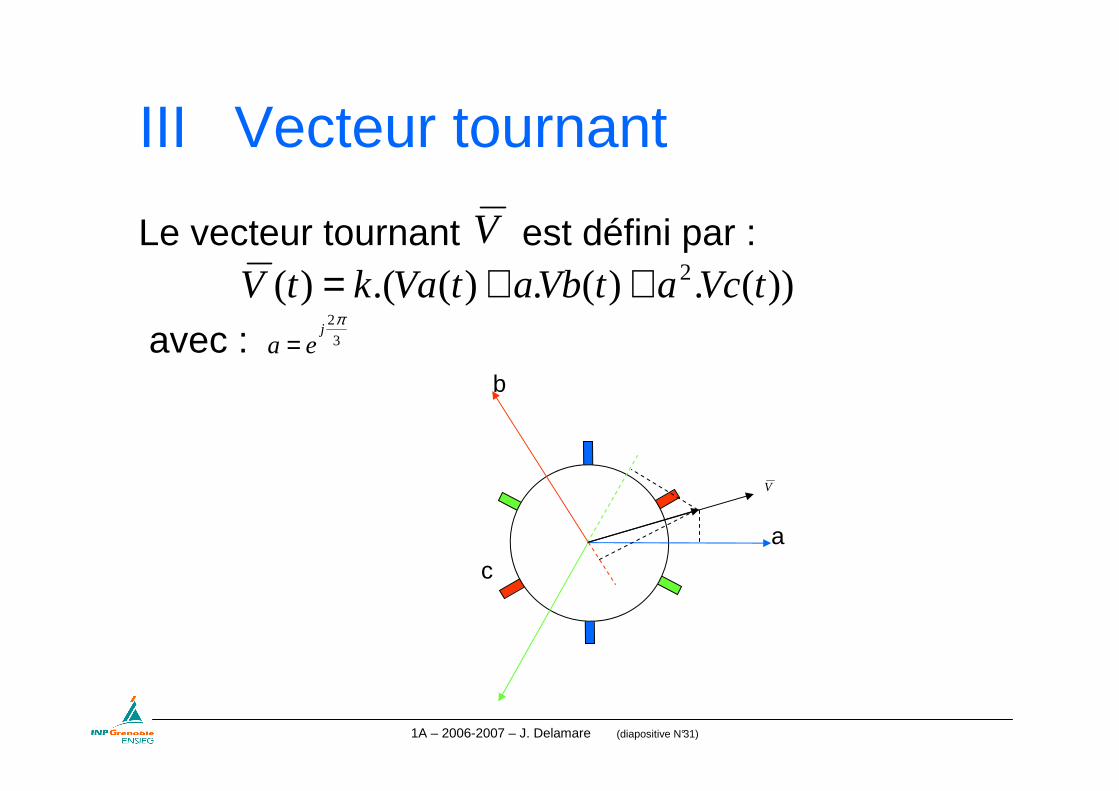
III Vecteur tournant
Le vecteur tournant est défini par :
avec :
))(.)(.)(.()( 2 tVcatVbatVaktV ++=3
2πj
ea =
V
a
b
c
V
1A – 2006-2007 – J. Delamare (diapositive N°32)
Vecteur tournant
1A – 2006-2007 – J. Delamare (diapositive N°33)
Propriétés du vecteur tournant :
))(Re(.3)(
)().()( *
tptp
titvtp
==
3
2=k
Puissance
pour
En régime sinusoïdal
tjeVV ω.=3
2=kpour
)Im(.3
)Re(.3
. *
PQ
PP
IVP
===
)(. ϕω −= tjeII
1A – 2006-2007 – J. Delamare (diapositive N°34)
Principe : Un rotor aimanté tourne dans un champ tournant créé par un stator.
Machine synchrone
• Le rotor peut être aimanté par des aimants (machine à aimants permanents) ou par un courant continu (machine à excitation).
• La force électromotrice dépend de l’aimantation du rotor, de la vitesse de rotation de la machine et du nombre de spire d’une phase.
• Le couple dépend de l’intensité du champ magnétique statorique, de l’aimantation du rotor et de l’angle entre l’aimantation du rotor et le champ satorique.
1A – 2006-2007 – J. Delamare (diapositive N°35)
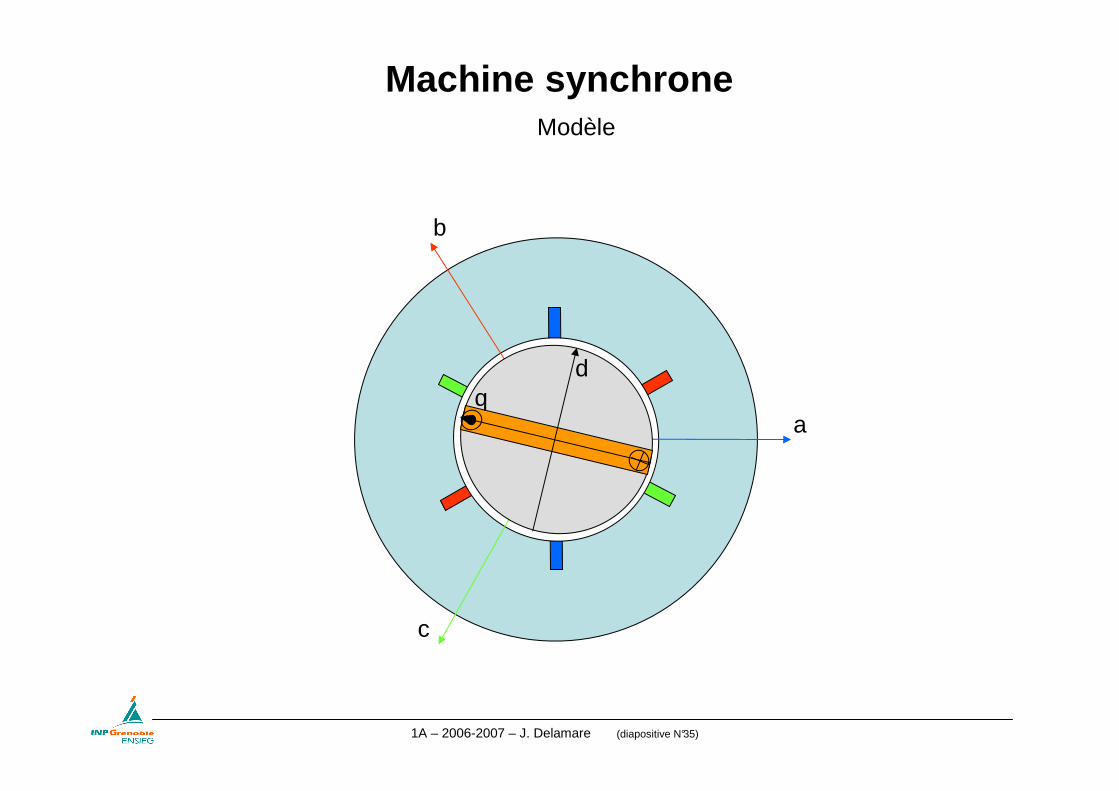
Machine synchrone
a
b
c
Modèle
d q
1A – 2006-2007 – J. Delamare (diapositive N°36)
Modélisation vectorielle :
1A – 2006-2007 – J. Delamare (diapositive N°37)
Modélisation vectorielle :
1A – 2006-2007 – J. Delamare (diapositive N°38)
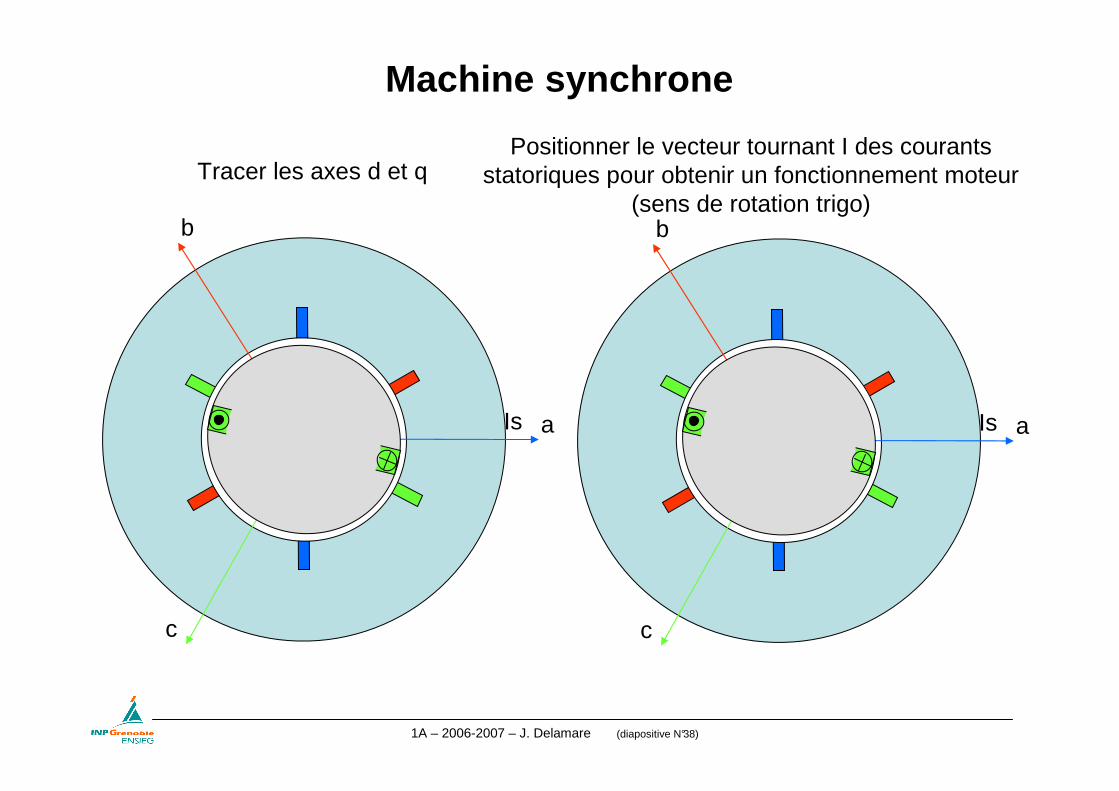
Machine synchrone
a
b
c
Is a
b
c
Is
Tracer les axes d et qPositionner le vecteur tournant I des courants
statoriques pour obtenir un fonctionnement moteur(sens de rotation trigo)
1A – 2006-2007 – J. Delamare (diapositive N°39)
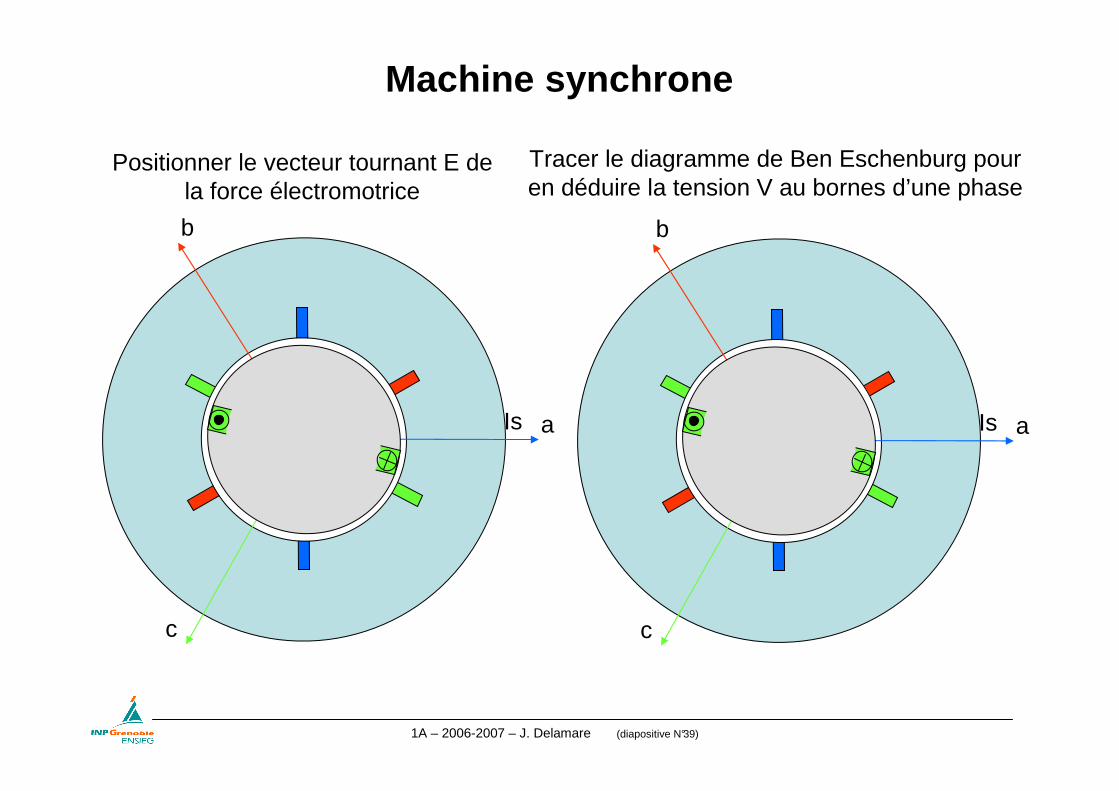
Machine synchrone
a
b
c
Is a
b
c
Is
Positionner le vecteur tournant E dela force électromotrice
Tracer le diagramme de Ben Eschenburg pour en déduire la tension V au bornes d’une phase
1A – 2006-2007 – J. Delamare (diapositive N°40)
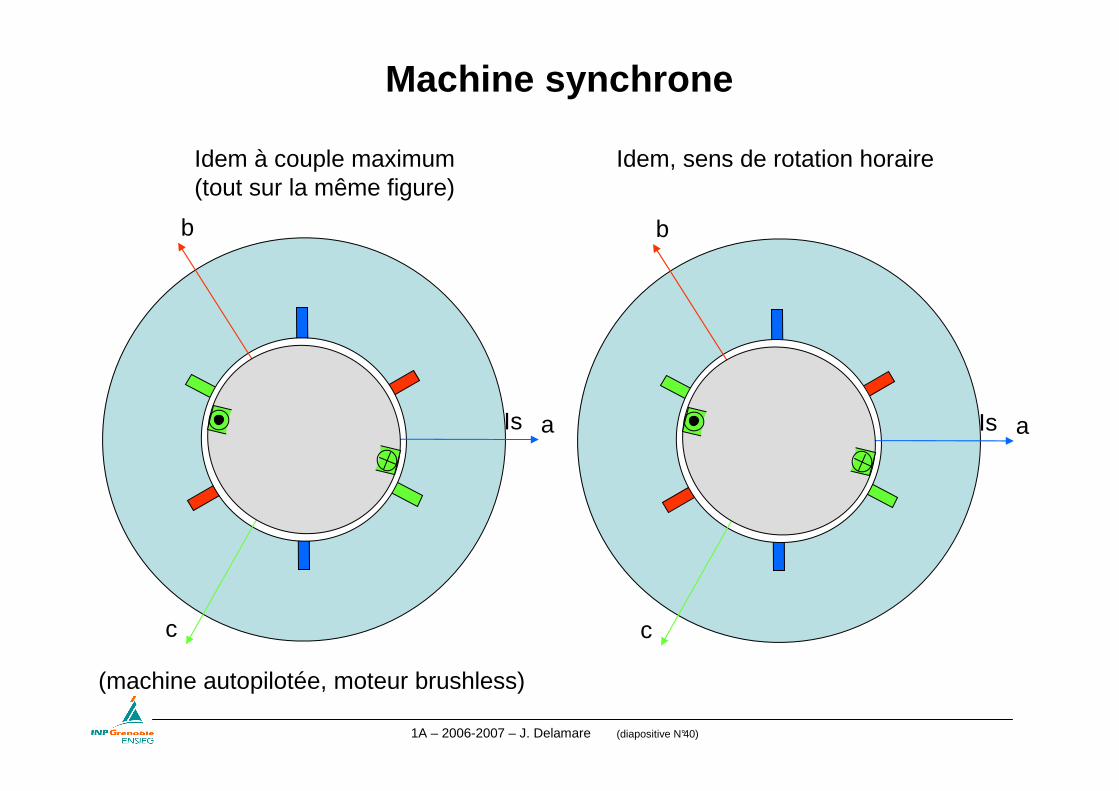
Machine synchrone
a
b
c
Is a
b
c
Is
Idem à couple maximum(tout sur la même figure)
Idem, sens de rotation horaire
(machine autopilotée, moteur brushless)
1A – 2006-2007 – J. Delamare (diapositive N°41)
Machine synchrone
a
b
c
Is a
b
c
Is
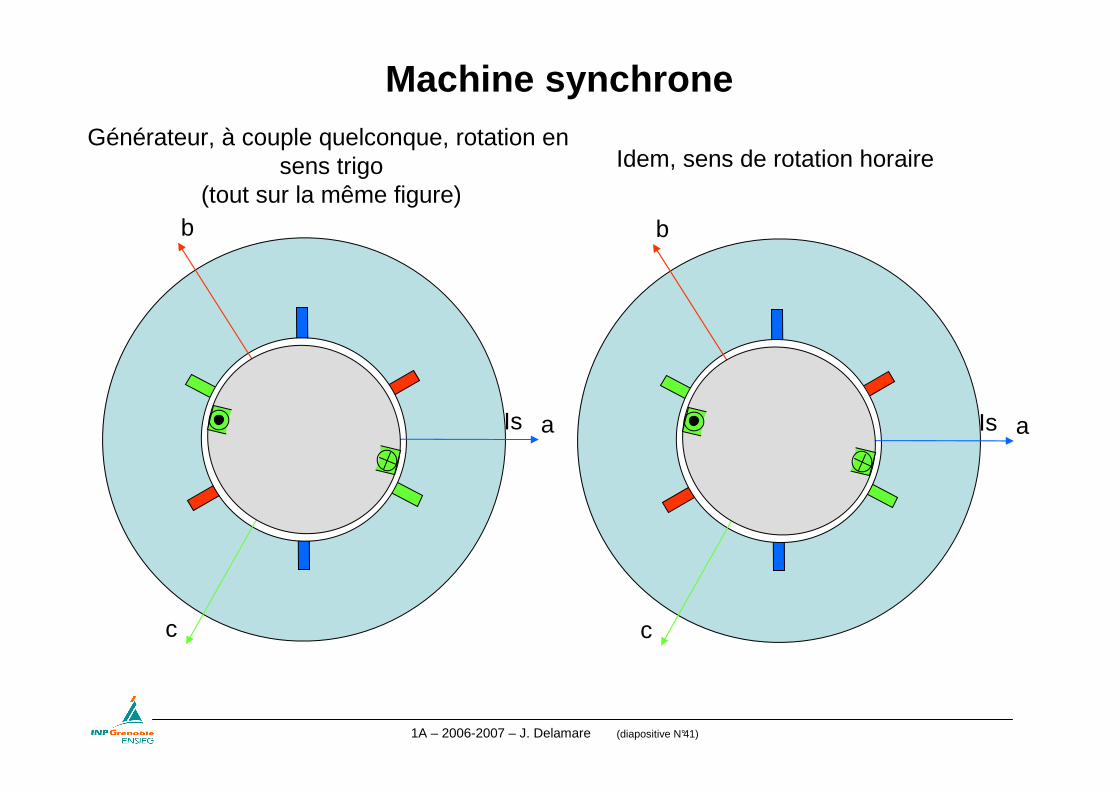
Générateur, à couple quelconque, rotation en sens trigo
(tout sur la même figure)
Idem, sens de rotation horaire
1A – 2006-2007 – J. Delamare (diapositive N°42)
Machine synchrone
a
b
c
Is a
b
c
Is
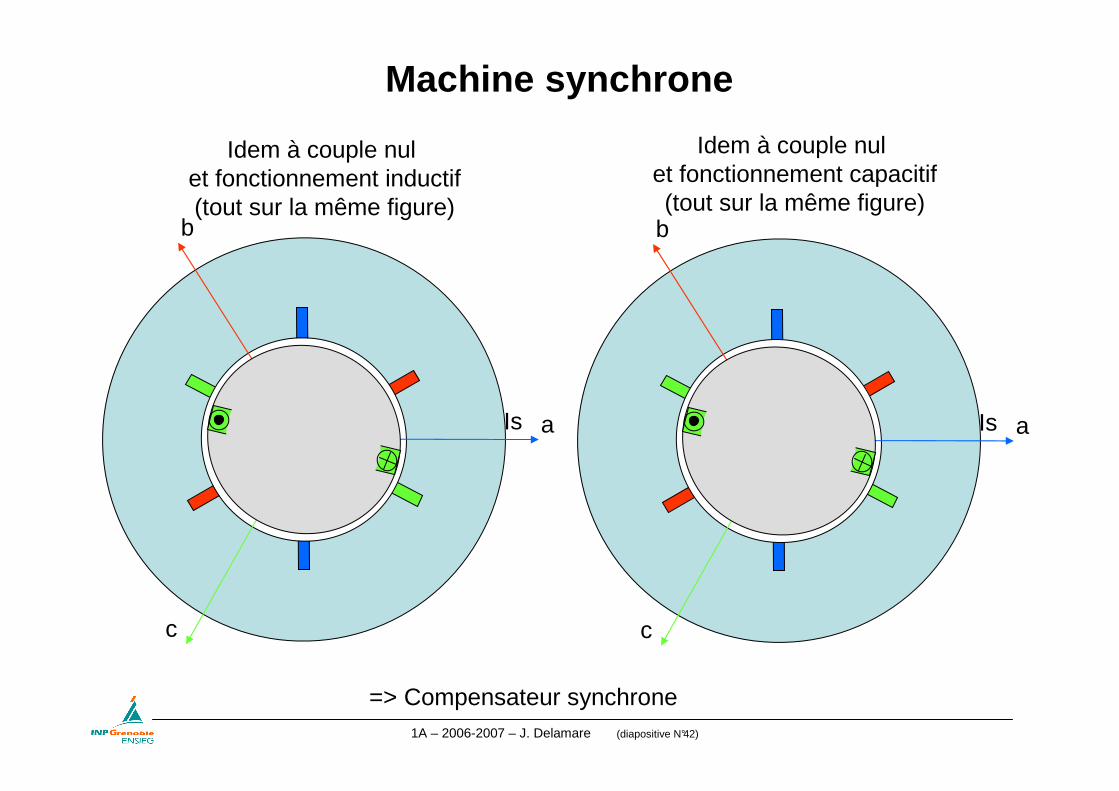
Idem à couple nul et fonctionnement inductif(tout sur la même figure)
Idem à couple nul et fonctionnement capacitif(tout sur la même figure)
=> Compensateur synchrone
1A – 2006-2007 – J. Delamare (diapositive N°43)
Introduction :
Vidéos des principes physiques
Machine asynchrone
Ejection d’une pièce par courants induits
Plaque d’aluminium (non magnétique)Extraction de la plaque d’un électroaimant 1Extraction de la plaque d’un électroaimant 2Lévitation de la plaque
Freinage d’un disque par courants induits
Entraînement d’un rotor par courants induits
1A – 2006-2007 – J. Delamare (diapositive N°44)
Principe : le stator créé un champ tournant => le rotor voit une variation de flux => des courants sont induits au niveau du rotor => l’interaction de ces courants et du champ statorique créé un couple
Machine asynchrone
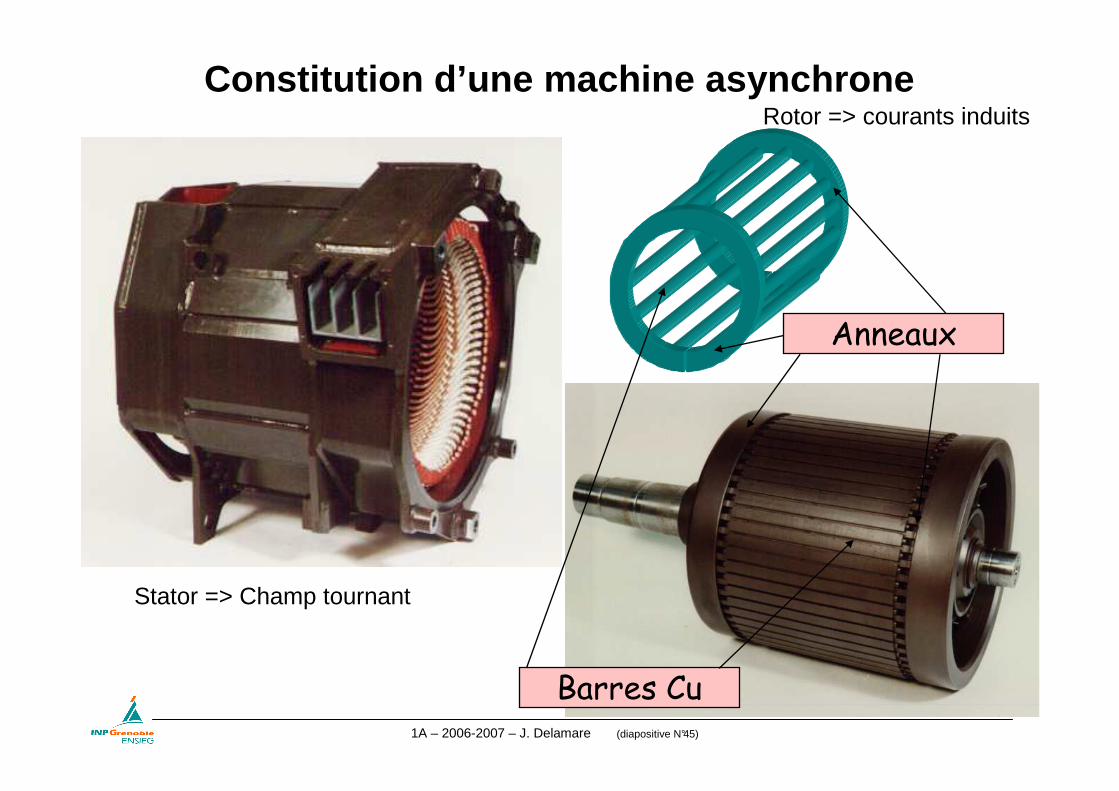
• Le rotor peut être bobiné (bobinage en court circuit) => machine à rotor bobiné.• Le rotor peut être réalisé avec des conducteurs « massifs » => Rotor à cage
• Le couple dépend de l’intensité du champ magnétique statorique, du champ induit au rotor et de l’angle entre le champ induit au rotor et le champ satorique.
1A – 2006-2007 – J. Delamare (diapositive N°45)
Constitution d’une machine asynchrone
Anneaux
Barres Cu
Stator => Champ tournant
Rotor => courants induits

1A – 2006-2007 – J. Delamare (diapositive N°46)
Coupe d’un rotor de machine asynchrone à cage
1A – 2006-2007 – J. Delamare (diapositive N°47)
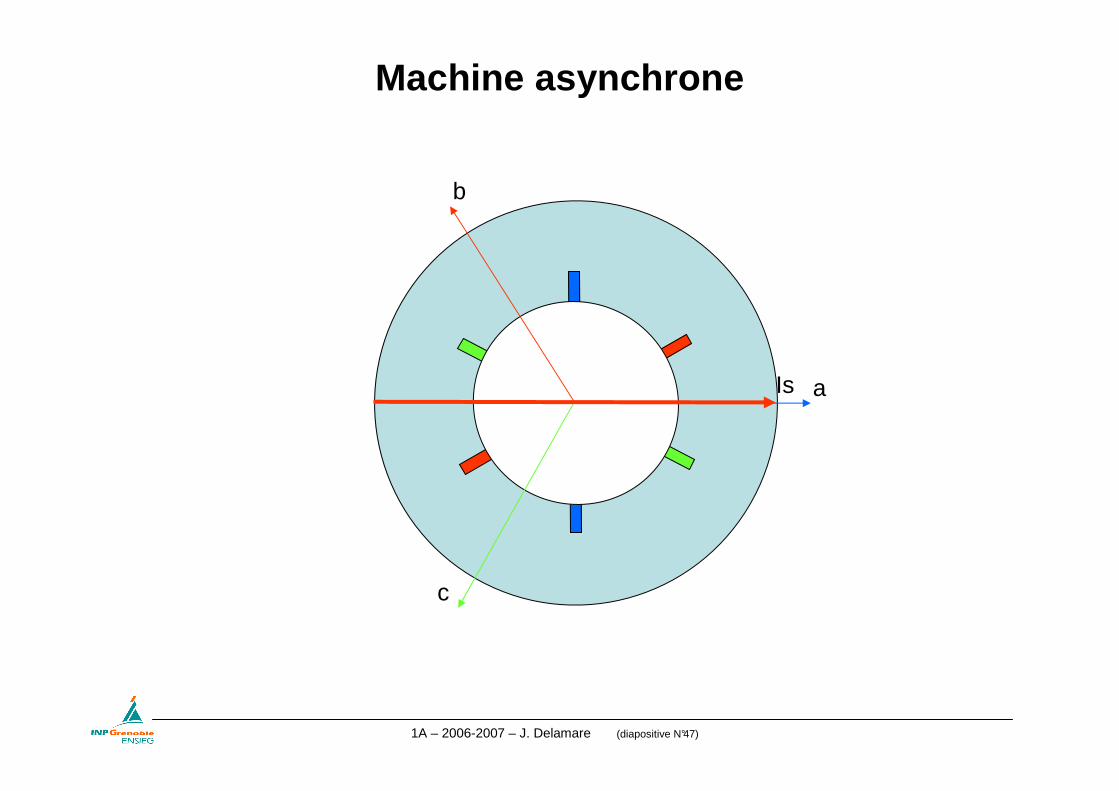
Machine asynchrone
a
b
c
Is
1A – 2006-2007 – J. Delamare (diapositive N°48)
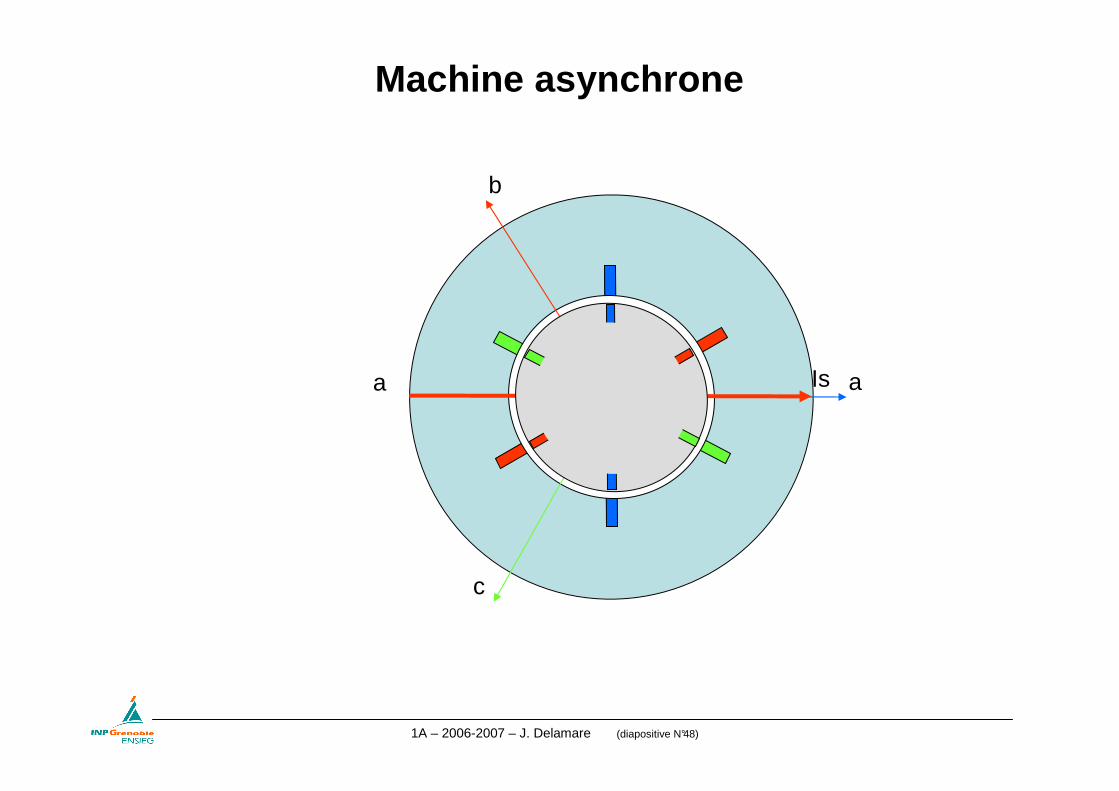
Machine asynchrone
a a
b
c
Is
1A – 2006-2007 – J. Delamare (diapositive N°49)
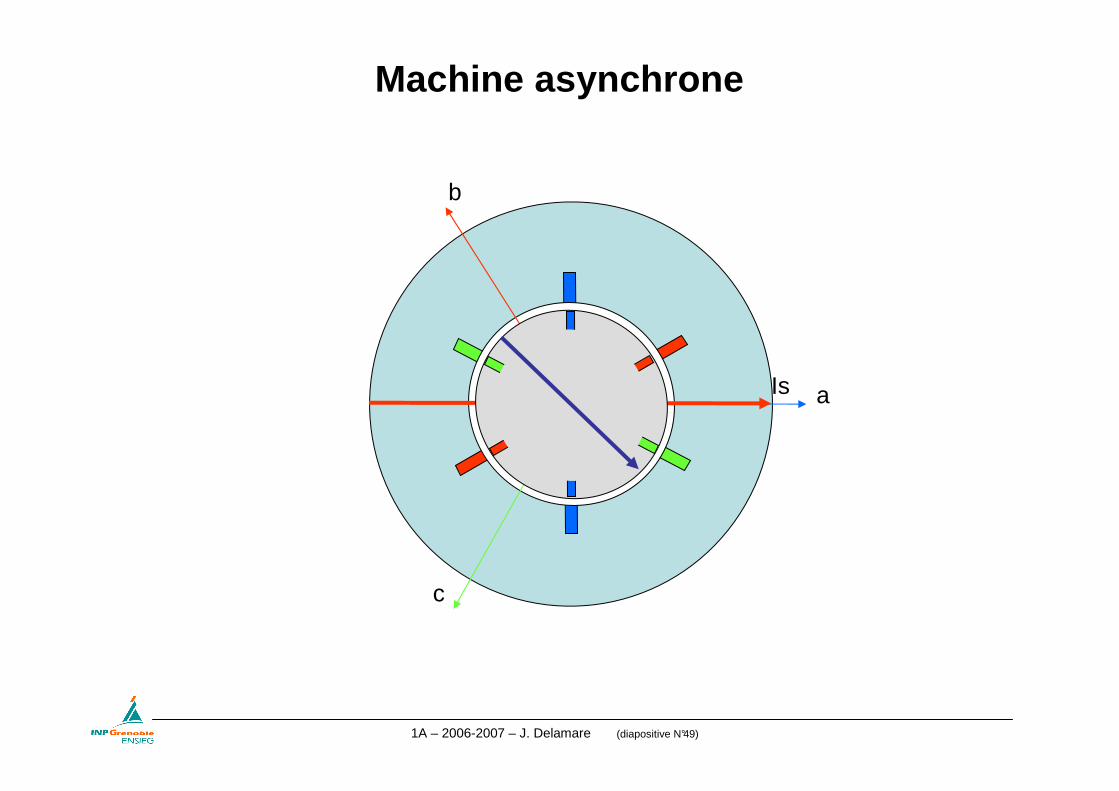
Machine asynchrone
a
b
c
Is
1A – 2006-2007 – J. Delamare (diapositive N°50)
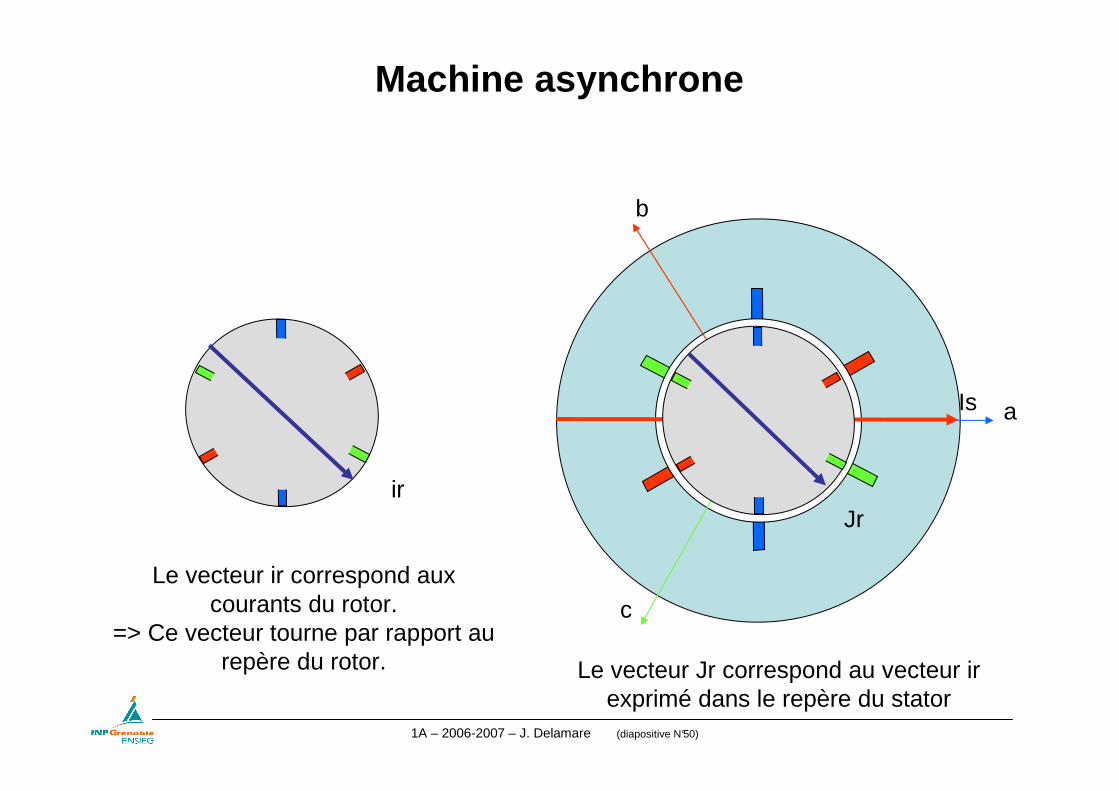
Machine asynchrone
a
b
c
Is
Jrir
Le vecteur ir correspond aux courants du rotor.
=> Ce vecteur tourne par rapport au repère du rotor. Le vecteur Jr correspond au vecteur ir
exprimé dans le repère du stator
1A – 2006-2007 – J. Delamare (diapositive N°51)
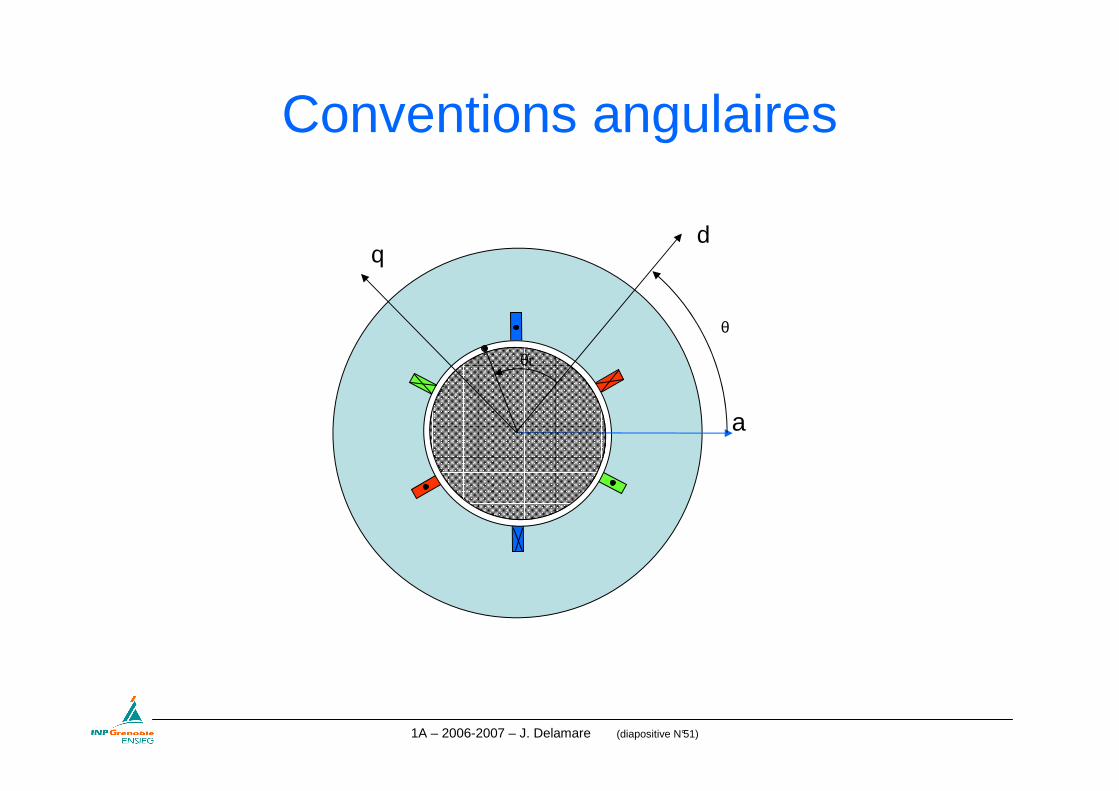
Conventions angulaires
a
dq
θ
θr
1A – 2006-2007 – J. Delamare (diapositive N°52)
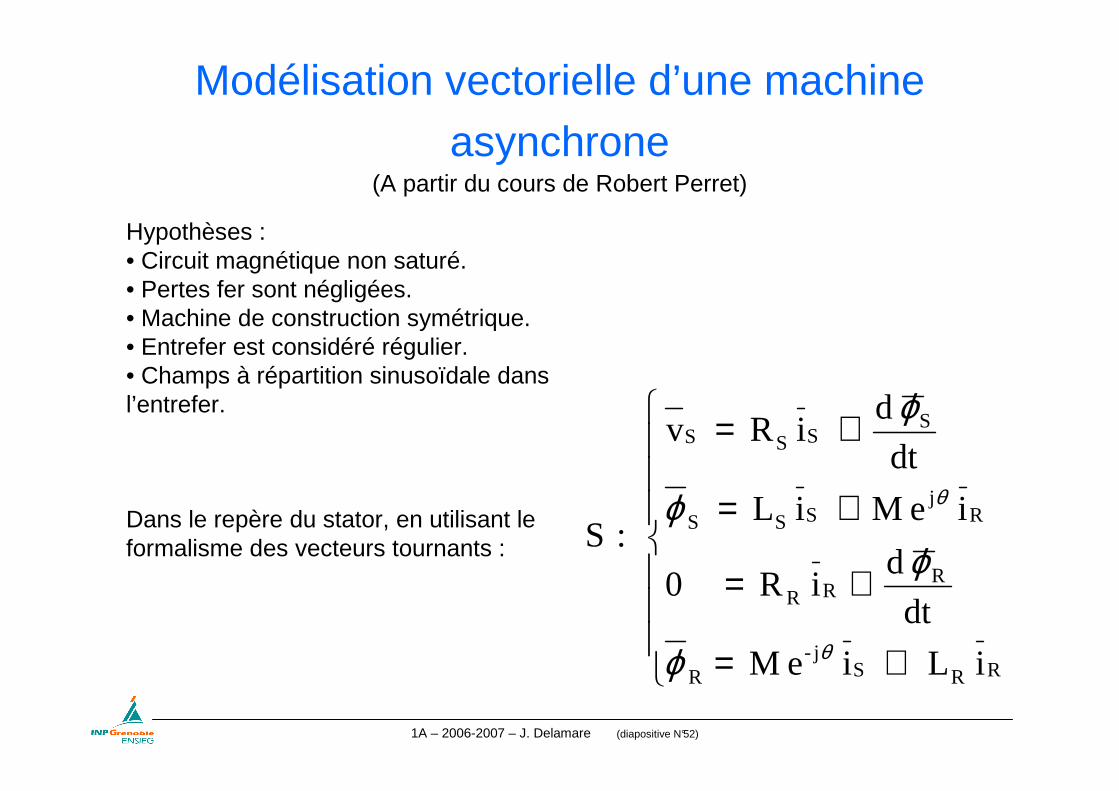
Modélisation vectorielle d’une machine asynchrone
(A partir du cours de Robert Perret)
+=
+=
+=
+=
i L i e M
dt
d i R 0
i e M i L
dt
d i R v
: S
RRSj-
R
RRR
Rj
SSS
SSSS
θ
θ
ϕ
ϕϕ
ϕ
Hypothèses :• Circuit magnétique non saturé.• Pertes fer sont négligées.• Machine de construction symétrique.• Entrefer est considéré régulier.• Champs à répartition sinusoïdale dans l’entrefer.
Dans le repère du stator, en utilisant le formalisme des vecteurs tournants :
1A – 2006-2007 – J. Delamare (diapositive N°53)
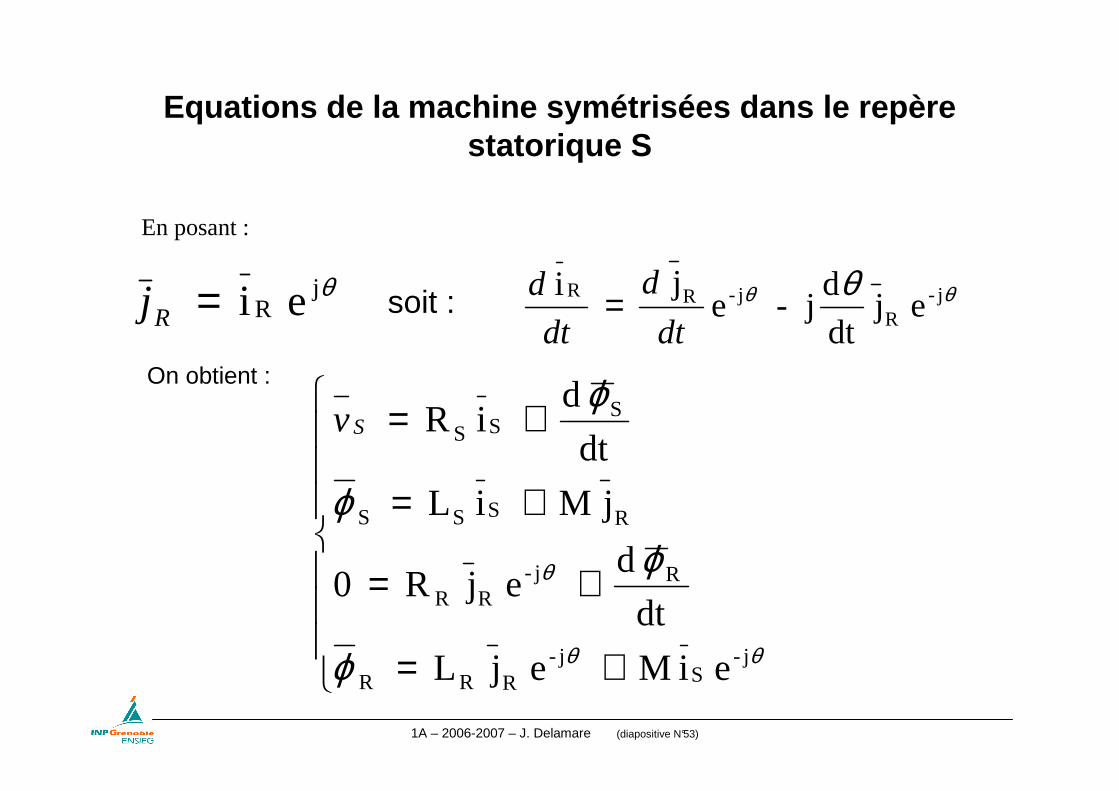
Equations de la machine symétrisées dans le repère statorique S
En posant :
θjR e i =Rj
On obtient :
θθ θ j-R
j-RRe j
dt
d j - e
j
i
dt
d
dt
d =soit :
+=
+=
+=
+=
θθ
θ
ϕ
ϕϕ
ϕ
j-S
j-RRR
Rj-RR
RSSS
SSS
e i M e j L
dt
d e j R 0
j M i L
dt
d i R Sv
1A – 2006-2007 – J. Delamare (diapositive N°54)
Equations de la machine symétrisées dans le repère statorique S
En posant :
On obtient :
soit :θϕψ je RR = θψθψϕ j-R e
dt
d j -
=
dt
d
dt
d RR
+=
+=
+=
+=
j L i M
j M i L
dt
d j -
dt
d j R 0
dt
d i R v
: S
RRSR
RSSS
RR
RR
SSSS
ψϕ
ψθψ
ϕ
1A – 2006-2007 – J. Delamare (diapositive N°55)
Schéma équivalent d’une machine asynchrone
l2
Lpvs
ip i2
R2.Rp lp l2
Lpvs
ip i2
R2.Rp lp
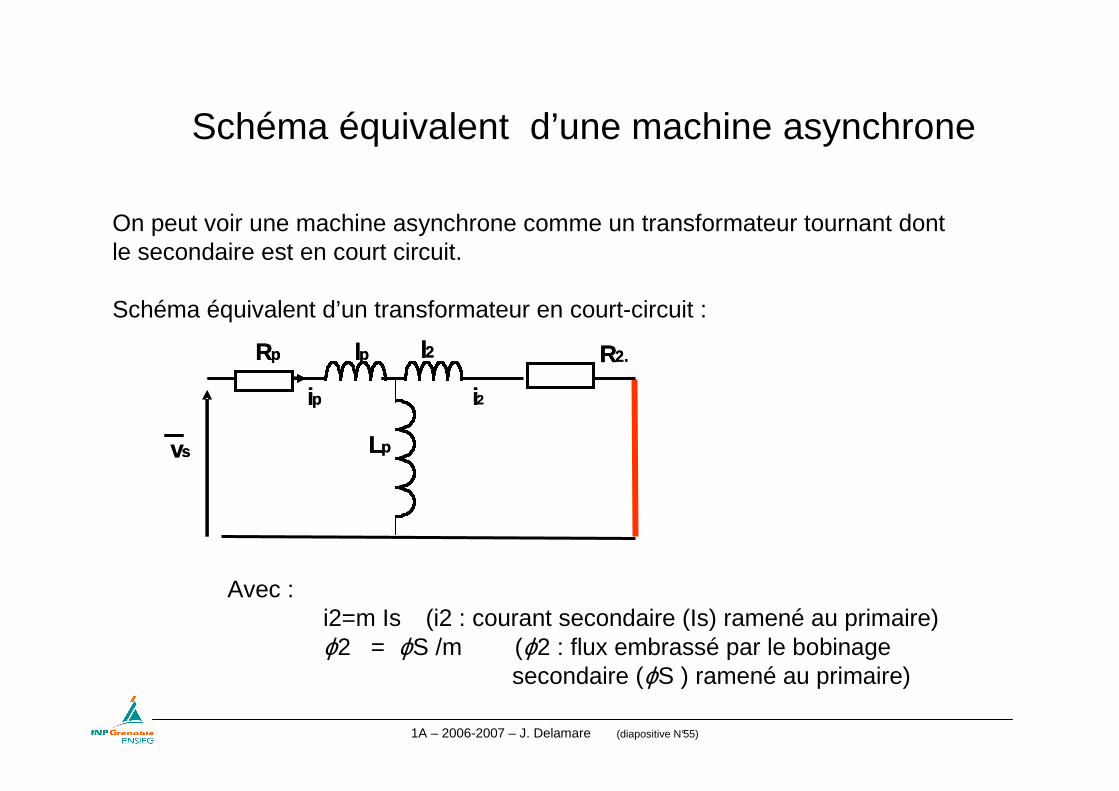
On peut voir une machine asynchrone comme un transformateur tournant dont le secondaire est en court circuit.
Schéma équivalent d’un transformateur en court-circuit :
Avec :i2=m Is (i2 : courant secondaire (Is) ramené au primaire)ϕ2 = ϕS /m (ϕ2 : flux embrassé par le bobinage
secondaire (ϕS ) ramené au primaire)
1A – 2006-2007 – J. Delamare (diapositive N°56)
Schéma équivalent d’une machine asynchrone
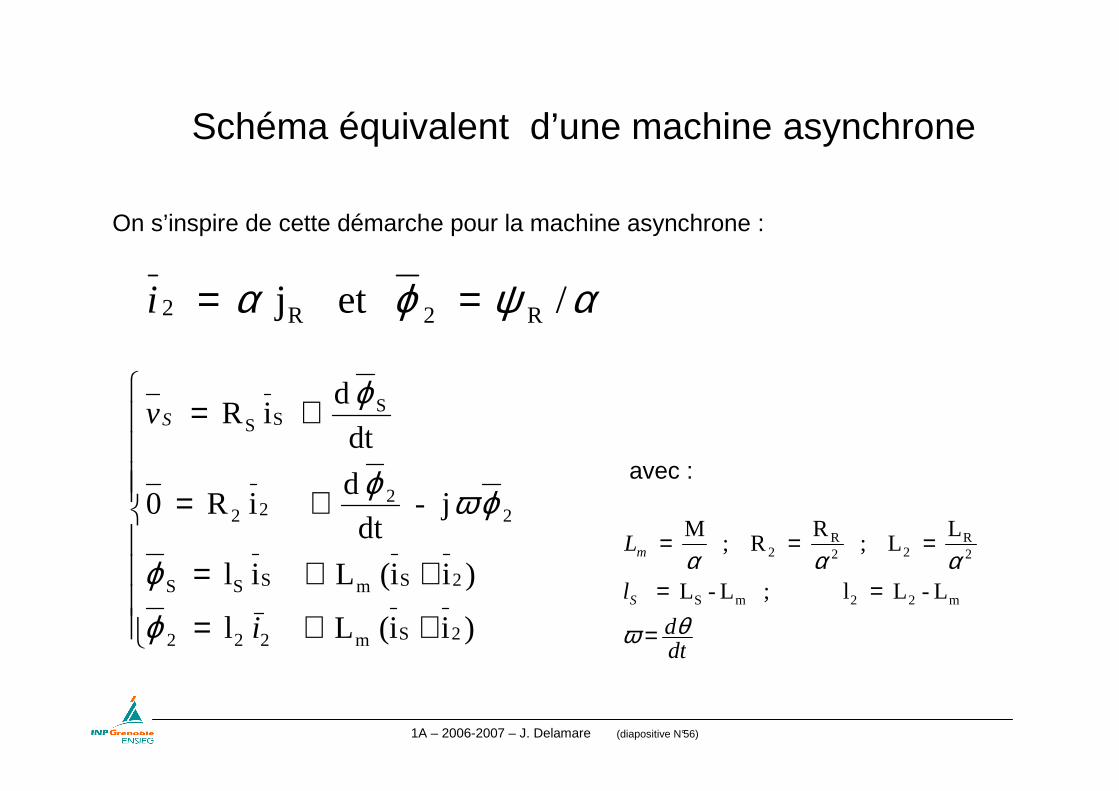
On s’inspire de cette démarche pour la machine asynchrone :
αψϕα / et j R2R2 ==i
++=
++=
+=
+=
)i i( L l
)i i( L i l
j - dt
d i R 0
dt
d i R
2Sm222
2SmSSS
22
22
SSS
i
vS
ϕϕ
ϕωϕ
ϕ
avec :
dtd
l
L
S
m
θω
ααα
=
==
===
m22mS
2R
22R
2
L - L l ; L - L
L L ;
R R ;
M
1A – 2006-2007 – J. Delamare (diapositive N°57)
Schéma équivalent d’une machine asynchrone
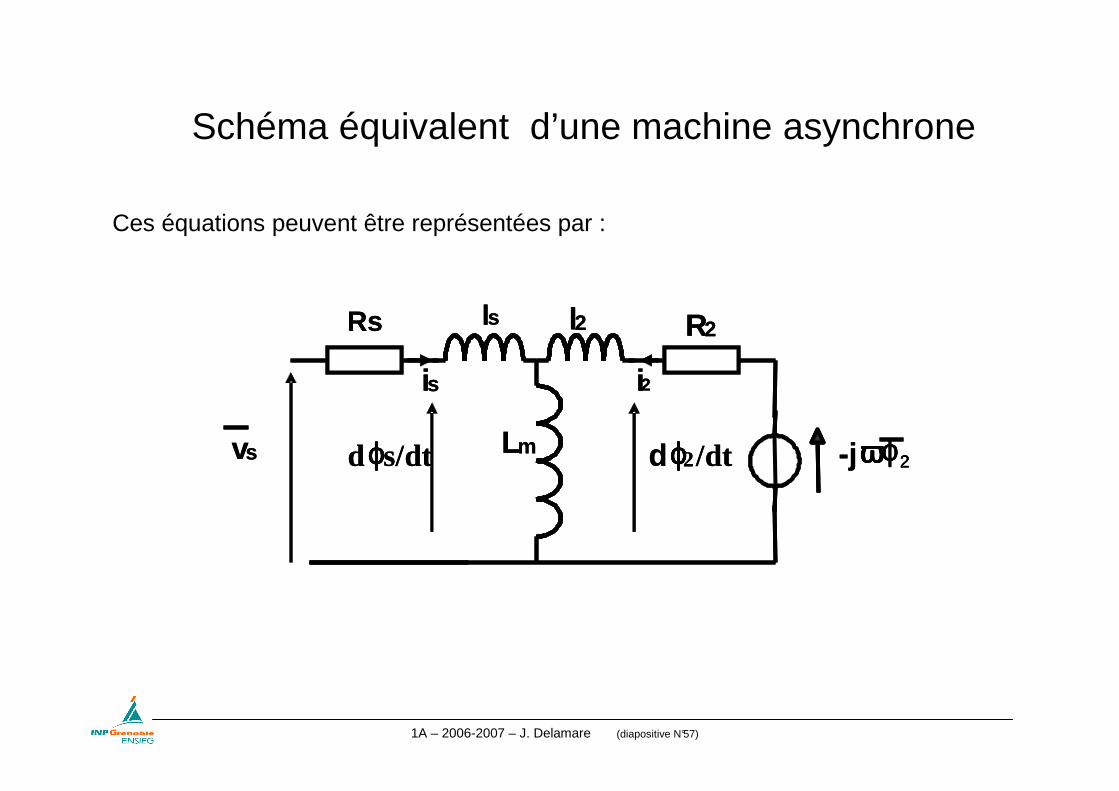
Ces équations peuvent être représentées par :
Rs ls l2 R2
Lmvs -j ωωωω
is i2
dϕϕϕϕs/dt d ϕϕϕϕ2/dt
Rs ls l2 R2
Lmvs -j ωωωωϕϕϕϕ2222
is i2
dϕϕϕϕs/dt d ϕϕϕϕ2/dt
1A – 2006-2007 – J. Delamare (diapositive N°58)
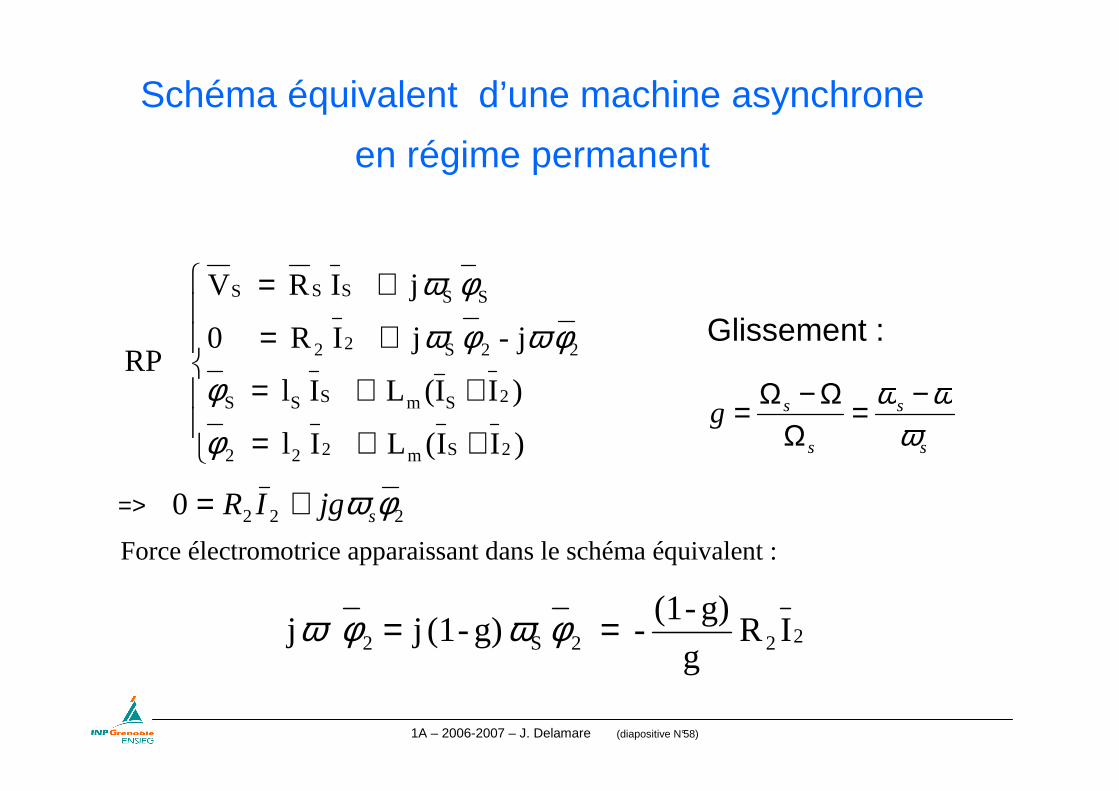
Schéma équivalent d’une machine asynchrone
en régime permanent
Glissement :
++=
++=
+=
+=
)I I(L I l
)I I(L I l
j - j I R 0
j I R V
RP
2Sm222
2SmSSS
22S22
SSSSS
φφ
φωφωφω
2220 φωsjgIR +=Force électromotrice apparaissant dans le schéma équivalent :
222S2 IR g
g)-(1 - g)-(1 j j == φωφω
=>
s
s
s
sgω
ωω −=Ω
Ω−Ω=
1A – 2006-2007 – J. Delamare (diapositive N°59)
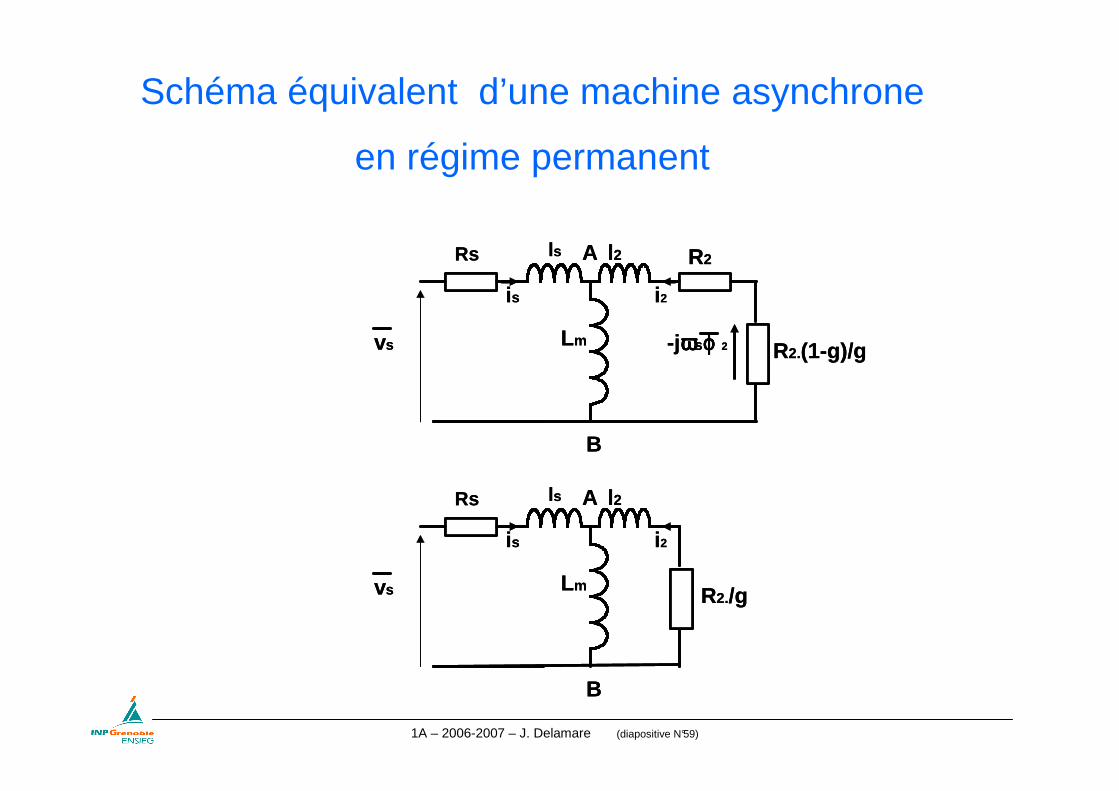
Rs ls l2 R2
Lmvs -jωωωωsϕϕϕϕ 2
is i2
R2.(1-g)/g
A
B
Rs ls l2
Lmvs
is i2
R2./g
A
B
Rs ls l2 R2
Lmvs -jωωωωsϕϕϕϕ 2
is i2
R2.(1-g)/g
A
B
Rs ls l2
Lmvs
is i2
R2./g
A
B
Schéma équivalent d’une machine asynchrone
en régime permanent
1A – 2006-2007 – J. Delamare (diapositive N°60)
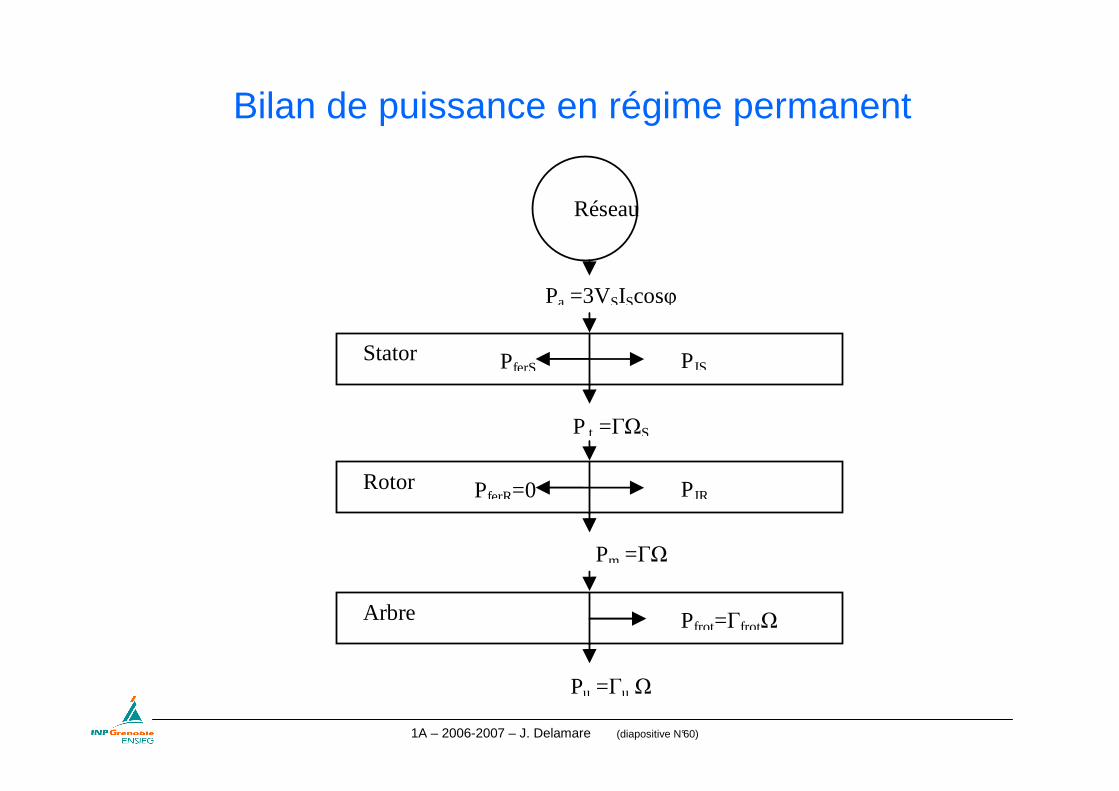
Bilan de puissance en régime permanent
Pa =3VSIScosφ
Réseau
PferS PJS Stator
P t =ΓΩS
PferR=0 PJR Rotor
Pfrot=ΓfrotΩ Arbre
Pm =ΓΩ
Pu =Γu Ω
1A – 2006-2007 – J. Delamare (diapositive N°61)
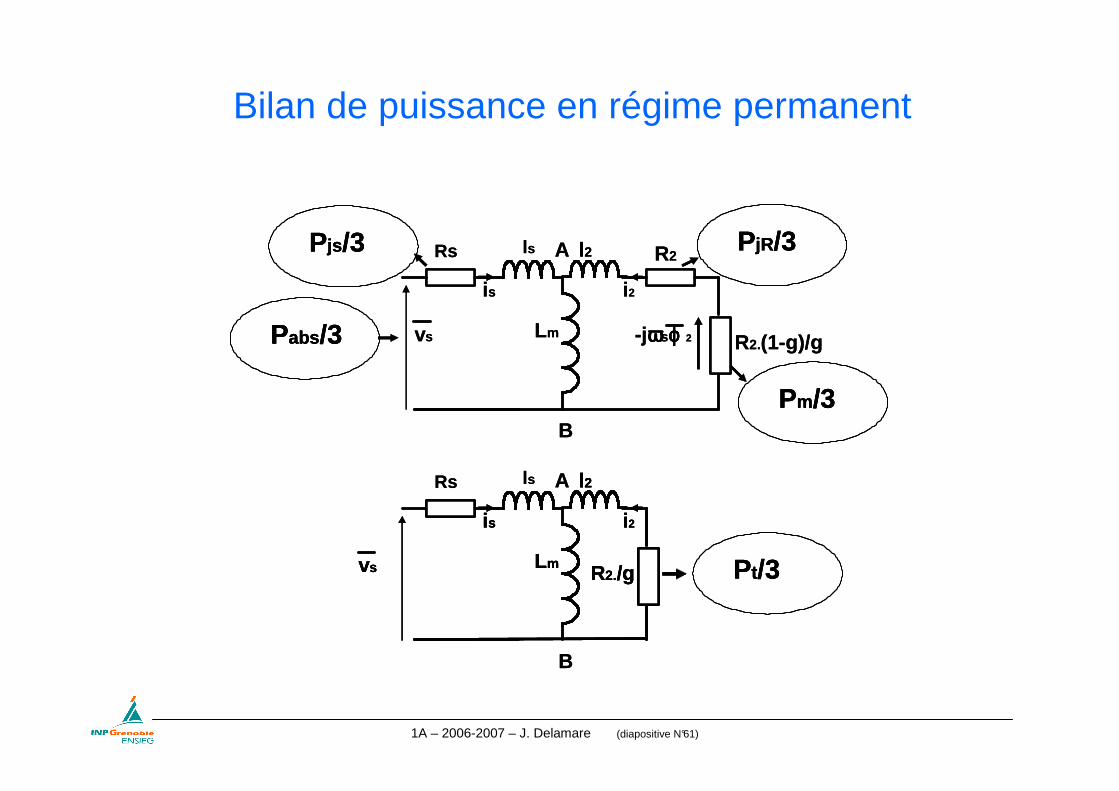
Bilan de puissance en régime permanent
Rs ls l2 R2
Lmvs -jωωωωsϕϕϕϕ 2
is i2
R2.(1-g)/g
A
B
Rs ls l2
Lmvs
is i2
R2./g
A
B
Pabs/3
Pjs/3 PjR/3
Pm/3
Pt/3
Rs ls l2 R2
Lmvs -jωωωωsϕϕϕϕ 2
is i2
R2.(1-g)/g
A
B
Rs ls l2
Lmvs
is i2
R2./g
l2
Lmvs
is i2
R2./g
A
B
Pabs/3Pabs/3
Pjs/3Pjs/3 PjR/3PjR/3
Pm/3Pm/3
Pt/3Pt/3
1A – 2006-2007 – J. Delamare (diapositive N°62)
Schéma équivalent généralement utilisé
1A – 2006-2007 – J. Delamare (diapositive N°63)
Calcul du couple
222
S
S2
2
I R g.
3
:
g)-(1 I R g
g-1 3
Ω=Γ
ΩΓ=ΩΓ==
soit
Pméca
1A – 2006-2007 – J. Delamare (diapositive N°64)
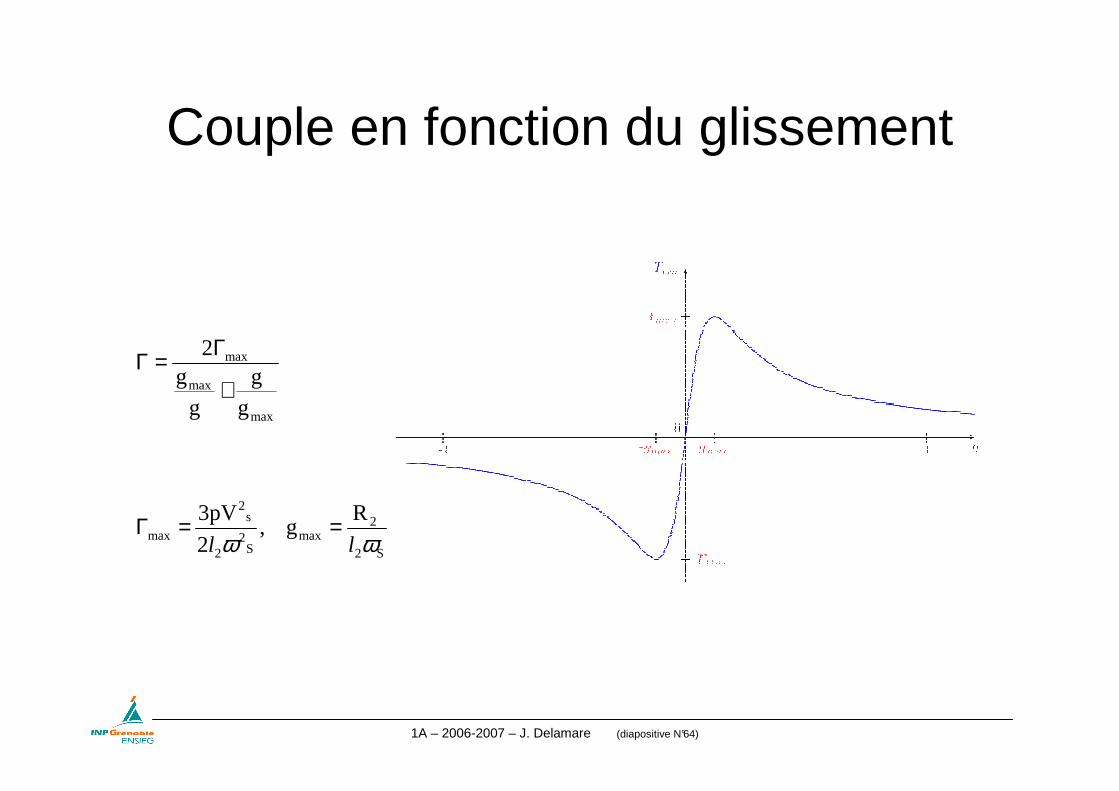
Couple en fonction du glissement
R
g ,2
3pV
gg
gg
2
S2
2max
S2
2
s2
max
max
max
max
ωω ll==Γ
+
Γ=Γ
1A – 2006-2007 – J. Delamare (diapositive N°65)
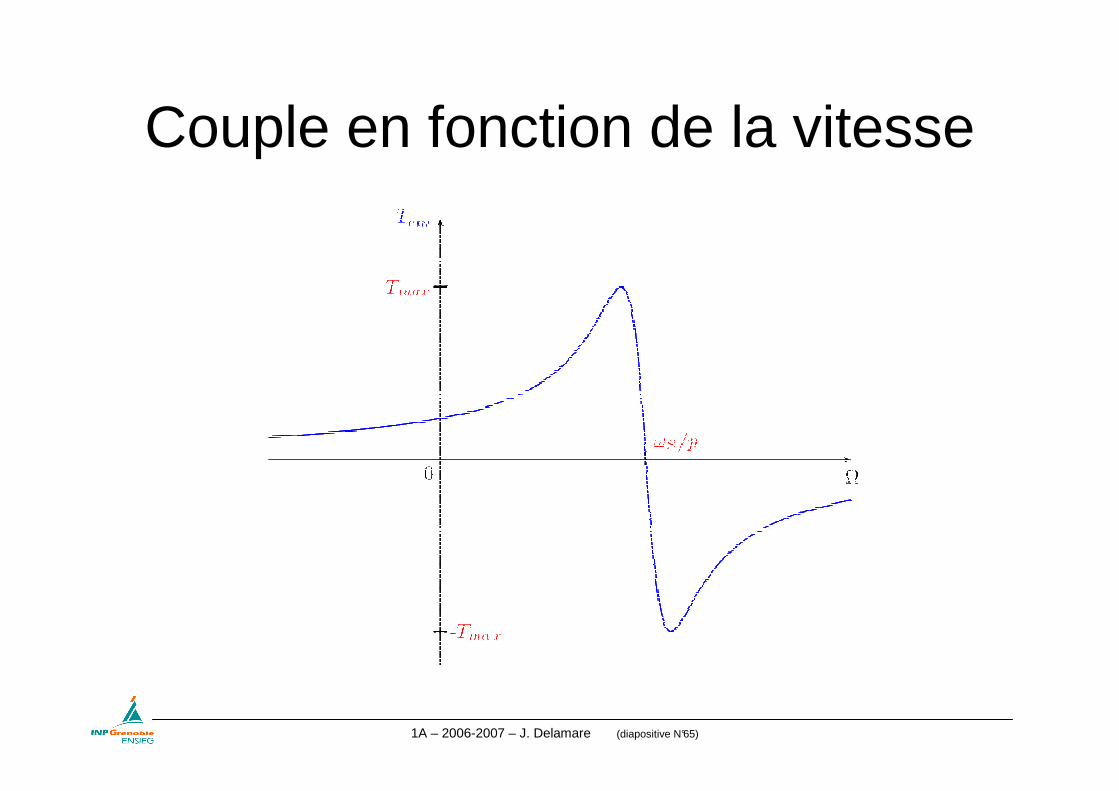
Couple en fonction de la vitesse
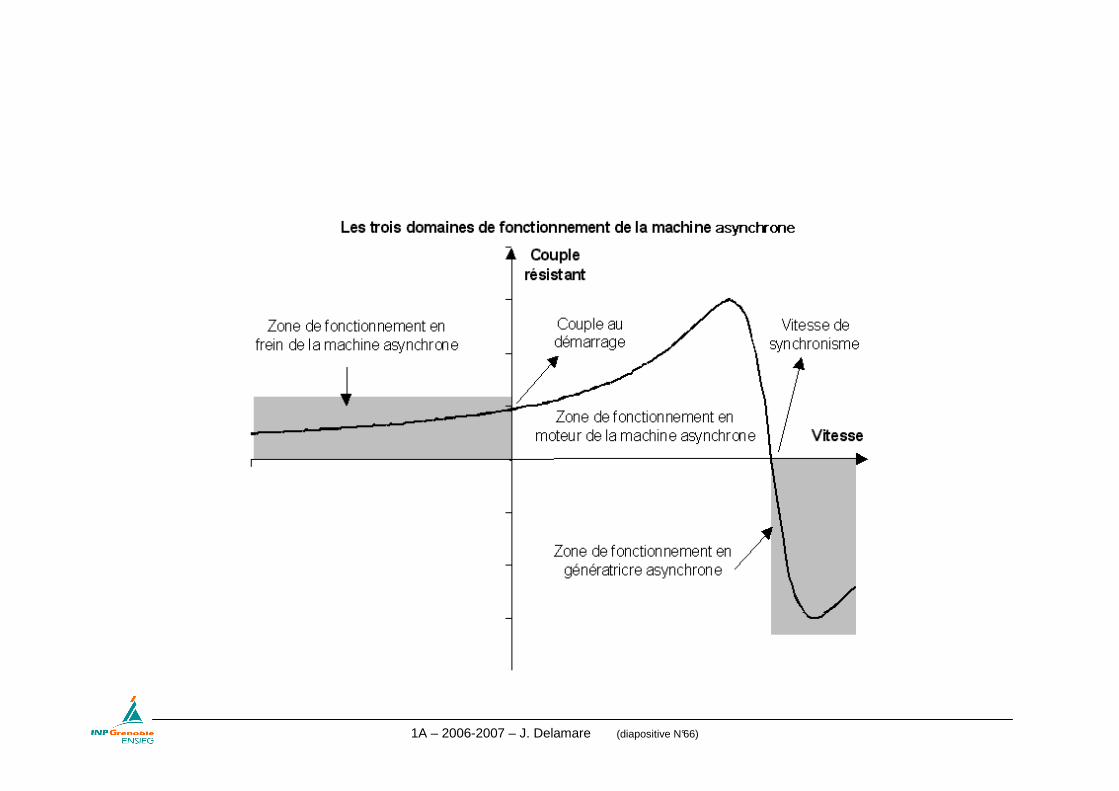
1A – 2006-2007 – J. Delamare (diapositive N°66)
Top Related