







Languages
Pages
Legal


Mecánica Utfsm
Motorización Automotriz [Escribir el subtítulo del documento]

Resumen ejecutivo.
En esta investigación, de carácter expositivo, se señala los distintos tipos de motorización
automotriz que hay en la actualidad en el mercado, donde se explica su funcionamiento y
características principales de los motores: Otto, Diesel, Wankel, Eléctricos, Aire comprimido.
Si entendemos como vehículo hibrido, aquel que posee mas de dos tipos de energías en su
desplazamiento, por lo general se utiliza este nombre para señalar la mezcla de de motor de
combustión interna y eléctrico.
Se mostraran los casos emblemáticos de vehículos que utilizaron mucho más eficientemente, los
ciclos anteriormente, demostrando el avance en la tecnología automotriz en el último año.
Contenido Resumen ejecutivo. ......................................................................................................................... 2
Introducción .................................................................................................................................... 3
Historia del Automovil..................................................................................................................... 4
TIPOS DE MOTORES AUTOMOTRICES ............................................................................................. 7
Motor de combustión interna Otto: ........................................................................................... 7
Motor diesel .............................................................................................................................. 11
Turbina a gas ............................................................................................................................. 13
Motor Wankel ........................................................................................................................... 14
Ventajas ......................................................................................................................................... 15
Vehículos con motor neumático ............................................................................................... 16
Motores Híbridos. ..................................................................................................................... 23
Conclusión ..................................................................................................................................... 31
Introducción
En el presente informe, se presentara de manera expositiva las distintas opciones que existen al
momento de adquirir un cierto vehículo, más bien saber algo sobre el motor que poseerá dicho
automóvil. Como funciona, las prestaciones y si es el motor adecuado para el fin que tendrá dicho
automóvil.
Historia del Automovil.
Los comienzos del automóvil, se remontan hacia finales del siglo XVIII, cuando el mundo
comenzaba a sentir los cambios producidos por la revolución industrial. Esta época se caracteriza
por el avance acelerado en varias disciplinas de la ciencia y la tecnología.
El primer vehículo autopropulsado fue construido en el año 1769, por Nicolas-Joseph Cugnot un
ingeniero francés. Se trataba de un triciclo movido a vapor, que montado sobre la rueda delantera
estaba una caldera y un motor de dos cilindros verticales y 50 litros de desplazamiento en el que la
rueda delantera era motriz y directriz. Se diseño para que transportar piezas de artillería. Estos
experimentos y prototipos eran financiados por el ejército francés, pero al producirse la revolución
francesa el proyecto se cancelo.
Imagen 1. Vehiculo de Cugnot de 1769.
En Inglaterra se desarrollaron varios prototipos durante las primeras décadas del 1800,
perfeccionando los componentes, para obtener mayores velocidades y potencias. Sin embargo, el
mal estado de los caminos y el temor del público impusieron un freno considerable al desarrollo

del transporte por carretera, sobre todo a raíz de la promulgación de la ley del banderín rojo, que
imponía a todo vehículo ir precedido por un hombre a pie mientras transitara por la vía pública.
Esta ley no fue abolida hasta 1896.
La autonomía de los vehículos de poca potencia era muy escasa para los motores de vapor, por lo
que se trataba de encontrar una fuente motriz de superior rendimiento. La solución a este
problema resultó ser el motor de combustión interna. Dicho motor se basa en una idea de Lebon,
que en 1801 presentó una patente en la que se describía un motor cuyo funcionamiento estaba
basado en la expansión de una mezcla de aire y gas inflamado. Sin embargo, el motor de explosión
no será una realidad hasta 1858, gracias a los trabajo de Joseph-Étienne Lenoir. En 1863 Lenoir
realiza la aplicación de su motor a un vehículo. Se trataba de un triciclo al cual se encuentra
acoplado el motor de un cilindro horizontal, a gas, de ciclo semejante a un motor actual de dos
tiempos. En 1866, dos ingenieros alemanes, Eugen Langen y August Otto, desarrollaron un motor
de gas, y en 1876 Otto construyó un motor de cuatro cilindros que constituyó la base de casi todos
los motores posteriores de combustión interna.
La importante unión de motor y vehículo se produjo en 1885 y 1887, cuando Karl Benz y luego
Gottlieb Daimler introdujeron los primeros automóviles de gasolina eficaces. El vehículo de Benz
era el mejor, con una gran diferencia, ya que estaba diseñado como un todo y empleaba las
nuevas tecnologías de la industria de la bicicleta. El carruaje de Daimler no era más que un coche
de caballos adaptado. Benz empezó a producir de forma limitada su vehículo de tres ruedas en
1888, con lo que nació la moderna industria del automóvil. Sin embargo, el motor de Daimler era
revolucionario y significó un cambio radical en la industria del automóvil.
Hasta mediados de la segunda década del siglo XX, la industria automovilística trabajó
fundamentalmente para la competición deportiva. La demanda privada de coches era muy escasa.
Cabe atribuirlo, por una parte, al hecho de que la innovación chocaba con la rutina de los usuarios,
como lo demuestran las leyes de circulación que se promulgaron en los primeros tiempos del
automóvil. Por otra parte el estado de las carreteras no permitía una utilización de los automóviles
en condiciones de comodidad. El coste elevado de los automóviles, consecuencia de las series
reducidas, fue otro factor disuasorio, como también las frecuentes averías y la inexistencia de una
imagen 2. Primer vehiculo con motor de combustión interna de Karl Benz.

red de servicios de reparación y mantenimiento. Un último factor podría ser el escaso desarrollo
de la tecnología del caucho que iba a permitir la fabricación de ruedas eficaces.
La 1ª Guerra Mundial, primera guerra mecánica, seria decisiva para la moderna historia del
automóvil. El inmenso esfuerzo de los dos bloques contendientes para desarrollar rápidamente y
mediante métodos racionales sus respectivas industrias de guerra sería la base sobre la cual se
asentaría el automóvil de la posguerra.
Al finalizar la contienda el automóvil adquirió en EE.UU. y algunos países europeos el carácter que
tiene en la actualidad de ser una de las industrias motrices de la economía, gracias a la
introducción sistemática de las técnicas de producción en serie y a una demanda masiva que lo
convertirían en el principal bien de consumo duradero.
Es importante destacar la contribución a la difusión y a la industria del automóvil, del
norteamericano Henry Ford. La producción en serie de los automóviles, con la permanente
reducción de costos, tecnología en la fabricación y del vehículo mismo, permitió la apertura de la
clase media al mercado automotriz. El modelo T, resume la visión de Henry Ford: fabricar
automóviles sencillos y baratos destinados al consumo masivo de la familia media estadounidense.
Desde su lanzamiento en el año 1908, las ventas del Ford T solo supieron de alzas.
La fabricación en cadena, con la que Ford revolucionó la industria automovilística, fue una apuesta
arriesgada en su época, pues sólo resultaría viable si hallaba una demanda capaz de absorber su
masiva producción, sin embargo las dimensiones del mercado estadounidense ofrecían un marco
propicio. Siempre que existiera esa demanda, la fabricación en cadena permitía ahorrar pérdidas
de tiempo de trabajo, al no tener que desplazarse los obreros de un lugar a otro de la fábrica,
llevando hasta el extremo las recomendaciones de la organización científica del trabajo.
En la década 1920-30 se incorporó de una manera definitiva toda la serie de elementos auxiliares
del automóvil. Así, en1923 se utilizan los primeros neumáticos de baja presión. Los años 1924,
1925 y1926 ven la aplicación del freno integral (sobre las cuatro ruedas, en contraposición los
anteriores, solamente aplicados sobre las ruedas motrices); el freno hidráulico, instalado por vez
primera por Chrysler en su modelo de 6 cilindros; las carrocerías compactas de acero, adoptadas
por la Budd Mfg. Co. en América y por la Citroën en Europa; el alumbrado antideslumbrante,
propuesto por los franceses Libié‚ Marchal y Blériot; eliminación de ruidos y humos. El modelo
norteamericano Chrysler Six puede considerarse como una síntesis de toda la serie de mejoras que
se produjeron en este periodo.
La crisis económica de 1929 tuvo unos efectos contundentes sobre la industria del automóvil y
decidió el desenlace definitivo de la situación creada a raíz de la Primera Guerra Mundial. El coche
en serie, con su necesidad de grandes capitales para garantizar producciones masivas a precios
módicos, sólo pudo ser fabricado por las grandes empresas, que al mismo tiempo eran las únicas
que podían resistir las alternativas del mercado. Las empresas marginales quedaron eliminadas,
desaparecieron o fueron absorbidas por las grandes. Sólo subsistieron las pequeñas empresas
dedicadas exclusivamente a los prototipos de distintos usos, tales como: Bugatti, Duesenberg,
Rolls-Royce, Ferrari, Maserati y Aston Martin.
En el periodo posterior a 1945 comenzó una importante expansión de la producción y prosiguió la
racionalización, tendencias que continúan en la actualidad. En 1950, Europa representaba el 13,6%
de la producción mundial, que ascendía a 8,2 millones de vehículos
Las crisis del petróleo de 1973 y 1978 y el consiguiente incremento del precio del barril,
supusieron un gran estímulo para diseñar vehículos y métodos de fabricación que permitieran el
ahorro de energía. El posterior desarrollo de motores más eficientes, automóviles más ligeros y
carrocerías más aerodinámicas fue reduciendo el consumo de combustible. En la mayoría de los
países, los gobiernos aumentaron los impuestos sobre la gasolina y el gasóleo, con lo que
modificaron las preferencias de los consumidores en favor de la eficiencia energética y
proporcionaron un marco seguro a las empresas automovilísticas que invertían recursos para
lograr esta eficiencia.
Además, las preocupaciones ecologistas sobre las emisiones de gases de escape, los tacos en las
ciudades y el ruido han hecho que en los países más desarrollados se aprueben leyes destinadas a
reducir el impacto negativo de los vehículos. El empleo de catalizadores y motores de bajo
consumo tiene por objetivo reducir las emisiones nocivas. El desarrollo de automóviles más ligeros
y aerodinámicos tiene el mismo efecto, ya que reduce el consumo de combustible. Los sistemas de
navegación y las autopistas de peaje pretenden reducir la congestion y los consiguientes costes
sociales, entre ellos la contaminación atmosférica.
Actualmente las tres grandes empresas automotrices: Ford, General Motors y Chrysler sufrieron
grandes pérdidas, producto a la crisis automotriz que comenzó a mediados de 2008. Los factores
que dieron origen a la crisis automotriz se pueden resumir en:
un enfoque errado de las tres grandes empresas automotrices americanas que se
empeñaron en seguir la producción de SUV, dado los precios altos del petróleo, en
consecuencia las ventas bajaron abruptamente.
El precio del petróleo, debilito el sector automotriz provocando que los consumidores de
vehículos SUV y deportivos prefirieran adquirir autos mas eficientes.
La crisis financiera mundial impacto profundamente a la industria automotriz americana,
teniendo caídas de dos digitos en sus ventas.
TIPOS DE MOTORES AUTOMOTRICES
Motor de combustión interna Otto:
El primer inventor, hacia 1862, fue el francés Alphonse Beau de Rochas. El segundo, hacia 1875,
fue el alemán doctor Nikolaus August Otto. Como ninguno de ellos sabía de la patente del otro
hasta que se fabricaron motores en ambos países, hubo un pleito. De Rochas ganó cierta suma de
dinero, pero Otto se quedó con la fama: el principio termodinámico del motor de cuatro tiempos
se llama aún ciclo de Otto.
Otto construyó su motor en 1866 junto con su compatriota Eugen Langen. Se trataba de un motor
de gas que poco después dio origen al motor de combustión interna de cuatro tiempos. Otto
desarrolló esta máquina, que después llevaría su nombre (motor cíclico Otto), en versiones de
cuatro y dos tiempos.
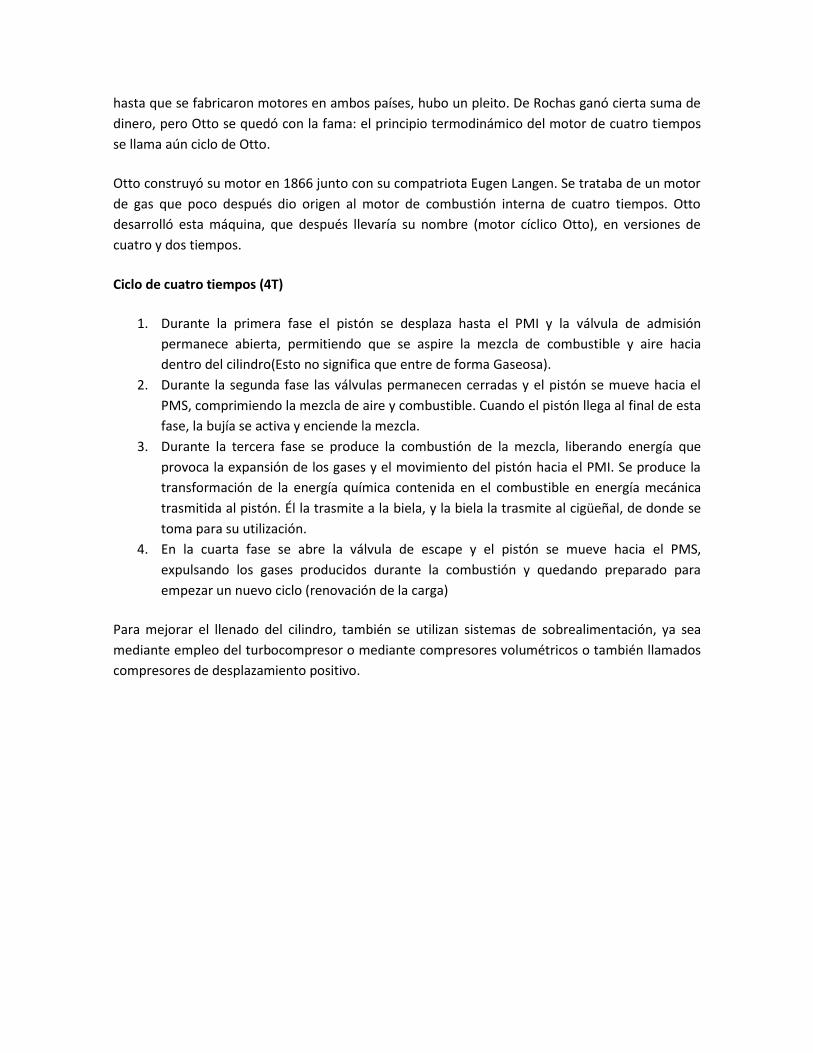
Ciclo de cuatro tiempos (4T)
1. Durante la primera fase el pistón se desplaza hasta el PMI y la válvula de admisión
permanece abierta, permitiendo que se aspire la mezcla de combustible y aire hacia
dentro del cilindro(Esto no significa que entre de forma Gaseosa).
2. Durante la segunda fase las válvulas permanecen cerradas y el pistón se mueve hacia el
PMS, comprimiendo la mezcla de aire y combustible. Cuando el pistón llega al final de esta
fase, la bujía se activa y enciende la mezcla.
3. Durante la tercera fase se produce la combustión de la mezcla, liberando energía que
provoca la expansión de los gases y el movimiento del pistón hacia el PMI. Se produce la
transformación de la energía química contenida en el combustible en energía mecánica
trasmitida al pistón. Él la trasmite a la biela, y la biela la trasmite al cigüeñal, de donde se
toma para su utilización.
4. En la cuarta fase se abre la válvula de escape y el pistón se mueve hacia el PMS,
expulsando los gases producidos durante la combustión y quedando preparado para
empezar un nuevo ciclo (renovación de la carga)
Para mejorar el llenado del cilindro, también se utilizan sistemas de sobrealimentación, ya sea
mediante empleo del turbocompresor o mediante compresores volumétricos o también llamados
compresores de desplazamiento positivo.
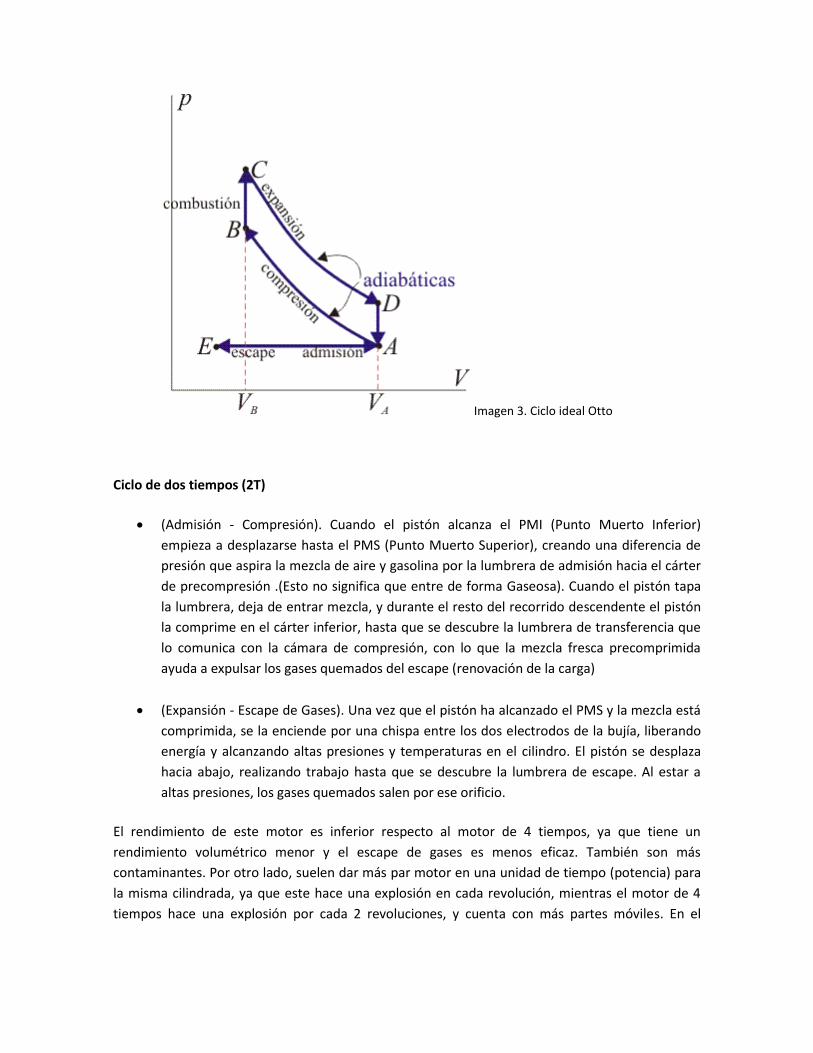
Imagen 3. Ciclo ideal Otto
Ciclo de dos tiempos (2T)
(Admisión - Compresión). Cuando el pistón alcanza el PMI (Punto Muerto Inferior)
empieza a desplazarse hasta el PMS (Punto Muerto Superior), creando una diferencia de
presión que aspira la mezcla de aire y gasolina por la lumbrera de admisión hacia el cárter
de precompresión .(Esto no significa que entre de forma Gaseosa). Cuando el pistón tapa
la lumbrera, deja de entrar mezcla, y durante el resto del recorrido descendente el pistón
la comprime en el cárter inferior, hasta que se descubre la lumbrera de transferencia que
lo comunica con la cámara de compresión, con lo que la mezcla fresca precomprimida
ayuda a expulsar los gases quemados del escape (renovación de la carga)
(Expansión - Escape de Gases). Una vez que el pistón ha alcanzado el PMS y la mezcla está
comprimida, se la enciende por una chispa entre los dos electrodos de la bujía, liberando
energía y alcanzando altas presiones y temperaturas en el cilindro. El pistón se desplaza
hacia abajo, realizando trabajo hasta que se descubre la lumbrera de escape. Al estar a
altas presiones, los gases quemados salen por ese orificio.
El rendimiento de este motor es inferior respecto al motor de 4 tiempos, ya que tiene un
rendimiento volumétrico menor y el escape de gases es menos eficaz. También son más
contaminantes. Por otro lado, suelen dar más par motor en una unidad de tiempo (potencia) para
la misma cilindrada, ya que este hace una explosión en cada revolución, mientras el motor de 4
tiempos hace una explosión por cada 2 revoluciones, y cuenta con más partes móviles. En el

pasado fueron sumamente populares por sus elevadas prestaciones en las motocicletas hasta una
cierta cilindrada, ya que al aumentar ésta su consumo era excesivo.
Éste tipo de motores se utilizan mayoritariamente en motores de poca cilindrada (ciclomotores,
desbrozadoras, motosierras, etc), ya que es más barato y sencillo de construir, y su emisión de
contaminantes elevada es muy baja en valor absoluto.
Imagen 4. Diagrama motor de dos tiempos.
Disposición de los cilindros que funcionan mediante ciclo Otto.
Imagen 5. Disposición radial de motor. Imagen 6. Disposición tipo Boxer del motor.

Imagen 7. Disposición en V del motor. Imagen 8. Disposición en línea del motor.
Motor diesel
Un motor diesel funciona mediante el encendido del combustible al ser inyectado pulverizado y
con alta presión en una cámara de combustión que contiene aire a una temperatura superior a la
temperatura de autocombustión, sin necesidad de chispa como en los motores de gasolina.
La temperatura que inicia la combustión procede de la elevación de la presión que se produce en
el segundo tiempo del motor, la compresión. El combustible se inyecta en la parte superior de la
cámara de combustión a gran presión desde unos orificios muy pequeños que presenta el inyector
de forma que se atomiza y se mezcla con el aire a alta temperatura y presión (entre 700 y 900 °C).
Como resultado, la mezcla se inflama muy rápidamente. Esta combustión ocasiona que el gas
contenido en la cámara se expanda, impulsando el pistón hacia abajo.
Esta expansión, al revés de lo que ocurre con el motor de gasolina, se hace a presión constante ya
que continúa durante la carrera de trabajo o de expansión. La biela transmite este movimiento al
cigüeñal, al que hace girar, transformando el movimiento lineal del pistón en un movimiento de
rotación.
Para que se produzca la autoinflamación es necesario alcanzar la temperatura de inflamación
espontánea del gasóleo. En frío es necesario pre-calentar el gasóleo o emplear combustibles más
pesados que los empleados en el motor de gasolina, empleándose la fracción de destilación del
petróleo fluctuando entre los 220 °C y 350 °C, que recibe la denominación de gasóleo o gasoil en
Inglés.

Ciclo de cuatro tiempos Diese (ideal)
Compresión 1-2
Combustión 2-3
Expansión 3-4
Última etapa 4-1
Imagen 10. Ciclo ideal Diesel
Tipos de motores diesel
Existen motores diesel tanto de 4 tiempos (los más usuales en vehículos terrestres por carretera)
como de 2 tiempos (grandes motores marinos y de tracción ferroviaria).
Aplicaciones
Maquinaria agrícola 2T (pequeña) y 4T(tractores, cosechadoras)
Propulsión ferroviaria 2T
Propulsión marina 4T hasta una cierta potencia, a partir de ahí 2T
Vehículos de propulsión a oruga
Automóviles y camiones (4T)

Turbina a gas
Una turbina de gas simple está compuesta de tres secciones principales: un compresor, un quemador
y una turbina de potencia. Las turbinas de gas operan en base en el principio del ciclo Brayton, en
donde aire comprimido es mezclado con combustible y quemado bajo condiciones de presión
constante. El gas caliente producido por la combustión se le permite expanderse a través de la
turbina y hacerla girar para llevar a cabo trabajo. En una turbina de gas con una eficiencia del 33%,
aproximadamente 2/3 del trabajo producido se usa comprimiendo el aire. El otro 1/3 está disponible
para generar electricidad, impulsar un dispositivo mecánico, etc.
Una variación del sistema de turbina simple (Brayton) es el de añadir un regenerador. El
regenerador es un intercambiador de calor que aprovecha la energía de los gases calientes de escape
al precalentar el aire que entra a la cámara de combustión. Este ciclo normalmente es utilizado en
turbinas que trabajan con bajas presiones. Ejemplos de turbinas que usan este ciclo son: la Solar
Centaur de 3500 hp hasta la General Electric Frame 5 de 35000 hp.
Las turbinas de gas con altas presiones de trabajo pueden utilizar un interenfriador para enfriar el
aire ente las etapas de compresión, permitiendo quemar más combustible y generar más potencia. El
factor limitante para la cantidad de combustible utilizado es la temperatura de los gases calientes
creados por la combustión, debido a que existen restricciones a las temperaturas que pueden
soportar los alabes de la turbina y otras partes de la misma. Con los avances en la Ingeniería de los
materiales, estos límites siempre van aumentando.
Existen también turbinas de gas con varias etapas de combustión y expansión y otras con
interenfriador y regenerador en el mismo ciclo.
Imagen11.Diagrama de funcionamiento de una turbina.
Motor Wankel
Un motor rotativo o Wankel, en honor a su creador el Dr. Felix Wankel, es un motor de combustión
interna que funciona de una manera completamente diferente de los motores alternativos.
En un motor alternativo; en el mismo volumen (mililitros) se efectúan sucesivamente 4
diferentes trabajos —admisión, compresión, combustión y escape. En un motor Wankel se
desarrollan los mismos 4 tiempos pero en lugares distintos de la carcasa o bloque; con el
pistón moviéndose continuamente de uno a otro. Más concretamente, el cilindro es una
cavidad con forma de 8, dentro de la cual se encuentra un rotor triangular que realiza un
giro de centro variable. Este pistón comunica su movimiento rotatorio a un cigüeñal que se
encuentra en su interior, y que gira ya con un centro único.
Al igual que un motor de pistones, el rotativo emplea la presión creada por la combustión
de la mezcla aire-combustible. La diferencia radica en que esta presión está contenida en la
cámara formada por una parte del recinto y sellada por uno de los lados del rotor triangular,
que en este tipo de motores reemplaza a los pistones.
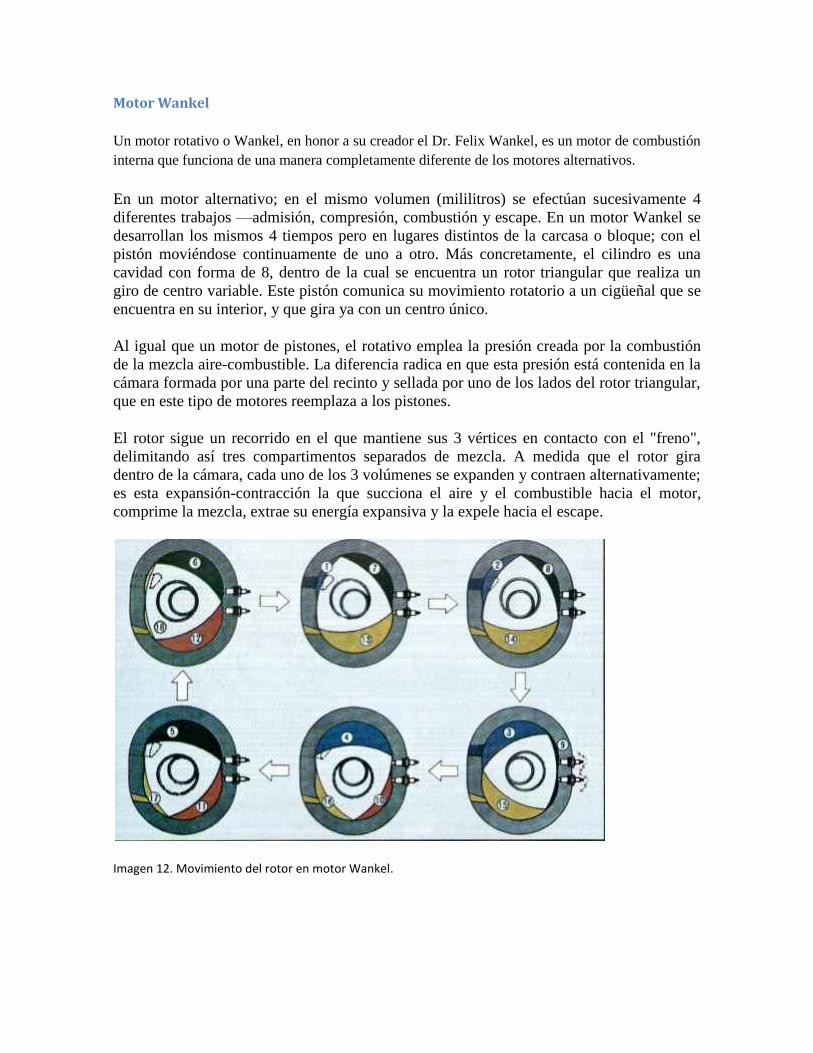
El rotor sigue un recorrido en el que mantiene sus 3 vértices en contacto con el "freno",
delimitando así tres compartimentos separados de mezcla. A medida que el rotor gira
dentro de la cámara, cada uno de los 3 volúmenes se expanden y contraen alternativamente;
es esta expansión-contracción la que succiona el aire y el combustible hacia el motor,
comprime la mezcla, extrae su energía expansiva y la expele hacia el escape.
Imagen 12. Movimiento del rotor en motor Wankel.

Ventajas
Menos piezas móviles: el motor Wankel tiene menos piezas móviles que un motor
convencional, tan solo 4 piezas; bloque, rotor (que a su vez está formado por segmentos y
regletas), árbol motriz y sistema de refrigeración/engrase (similar a los que montan los
motores de pistón). Esto redunda en una mayor fiabilidad.
Suavidad de marcha: todos los componentes de un motor rotativo giran en el mismo
sentido (apuntando al sol), en lugar de sufrir las constantes variaciones de sentido a las
que está sometido un pistón. Están equilibrados internamente con contrapesos giratorios
para suprimir cualquier vibración. Incluso la entrega de potencia se desarrolla en forma
más progresiva, dado que cada etapa de combustión dura 90° de giro del rotor y a su vez
como cada vuelta del rotor representa 3 vueltas del eje, cada combustión dura 270° de
giro del eje, es decir, 3/4 de cada vuelta; compárenlo con un motor monocilíndrico, donde
cada combustión transcurre durante 180° de cada 2 revoluciones, o sea 1/4 de cada vuelta
del cigüeñal. Se produce una combustión cada 120º del rotor y 360º del eje.
Menor velocidad de rotación: dado que los rotores giran a 1/3 de la velocidad del eje y al
tocar el freno, las piezas principales del motor se mueven más lentamente que las de un
motor convencional, aumentando la fiabilidad.
Menores vibraciones: dado que las inercias internas del motor son muy pequeñas (no hay
bielas, ni volante de inercia, ni recorrido de pistones, ni movimiento), solo se producen
pequeñas vibraciones en la excéntrica.
Menor peso: debido al menor número de piezas que forman el motor en comparación con
los de pistones y dado que generalmente se construyen motores de dos o tres rotores de
600 cc o 700 cc cada uno, ayuda a conseguir un menor peso final del mismo.
Desventajas
Emisiones: es más complicado (aunque no imposible) ajustarse a las normas de emisiones
contaminantes, ya que trabaja igual que un motor de 2 tiempos, consumiendo aire,
combustible y aceite.
Costos de mantenimiento: al no estar tan difundido, su mantenimiento resulta costoso.
Consumo: la eficiencia termodinámica (relación consumo-potencia) se ve reducida por la
forma alargada de las cámaras de combustión y la baja relación de compresión.
Difícil estanqueidad: resulta muy difícil aislar cada una de las 3 secciones del cilindro en
rotación, que deben ser impermeables unas de otras para un buen funcionamiento.
Además se hace necesario cambiar el sistema de estanqueidad cada 6 años
aproximadamente, por su fuerte desgaste.
Sincronización: la sincronización de los distintos componentes del motor debe ser muy
buena para evitar que la explosión de la mezcla se inicie antes de que el pistón rotativo se
encuentre en la posición adecuada. Si esto no ocurre, la ignición empujará en sentido
contrario al deseado, pudiendo dañar el motor.

Vehículos con motor neumático
Motor neumático:
El motor neumático es ampliamente utilizado en la industria, debido a sus notables
características, con respecto a su competidor el motor eléctrico. Son motores de baja potencia, sin
embargo produce un par motor alto.
Los tipos de motores neumáticos son dos: el de paletas y de pistones.
Motores neumáticos de paletas
Estos motores tienen un rotor montado excéntricamente en un cilindro, con paletas longitudinales
alojadas en ranuras a lo largo del rotor.
El par se origina cuando el aire a presión actúa sobre las paletas. El número de paletas suele ser de
4 a 8. Normalmente cuatro o cinco paletas son suficientes para la mayoría de las aplicaciones. Se
utilizan mayor número de paletas cuando se necesita mejorar la fiabilidad de la máquina y su par
de arranque.
Los motores de paletas giran desde 3000 a 25000 rpm, en vacío.
Como norma general, los motores deben trabajar con una precarga para evitar que giren a
velocidades altas.
Al girar en vacío el motor, el número de veces que las paletas rozan sobre el cilindro es casi doble
que en carga. Esto supone un desgaste innecesario de las paletas y de la pared del cilindro sobre la
que deslizan.
Los motores de paletas giran a velocidades más altas y desarrollan más potencia en relación con su
peso que los motores de pistones, sin embargo tienen un par de arranque menos efectivo.
Motores Neumáticos de Pistones
Los motores neumáticos de pistones tienen de 4 a 6 cilindros. La potencia se desarrolla bajo la
influencia de la presión encerrada en cada cilindro.
Trabajan a revoluciones más bajas que los motores de paletas. Tienen un par de arranque elevado
y buen control de su velocidad. Se emplean para trabajos a baja velocidad con grandes cargas.
Pueden tener los pistones colocados axial o radialmente.
Las ventajas de los motores neumáticos son:

Diseño compacto y ligero. Un motor neumático pesa menos que un motor eléctrico de la
misma potencia y tiene un volumen más pequeño. Los motores neumáticos desarrollan
más potencia con relación a su tamaño que la mayoría de los otros tipos de motores.
El par del motor neumático aumenta con la carga. La potencia de un motor neumático es
relativamente constante dentro de una amplia gama de velocidad. Cuando la velocidad se
reduce debido a un incremento de la carga, el par aumenta.
Los motores neumáticos no se dañan cuando se bloquean por sobrecargas y no importa el
tiempo que estén bloqueados. Cuando la carga baja a su valor normal, el motor vuelve a
funcionar correctamente. No se calientan cuando se sobrecargan, aún estando
bloqueados durante un largo tiempo.
Los motores neumáticos, se pueden arrancar y parar de forma ilimitada. El arranque, el
paro y el cambio de sentido de giro son instantáneos, incluso cuando el motor esté
trabajando a plena carga.
Imagen 13. Corte de un motor neumático de pistón
Imagen 14. Corte de un motor neumático de paleta.

Motor neumático en uso automotriz.
El desarrollo de vehículos con motor neumático es relativamente reciente. En la actualidad existen
prototipos que demuestran que esta tecnología puede ser una posible solución para la
contaminación en las grandes urbes.
Existen varias empresas que están interesadas en este tipo de propulsión de vehículos, tales como
MDI, Energine, Yakey Corp, sin embargo nos centraremos en presentar el trabajo de la empresa
Moteur Developpment International, MDI.
Prototipo de la empresa MDI
Esta empresa fundada por el ingeniero francés Guy Nègre, se dedica al desarrollo de motores CAT
(Compressed Air Technologie systems) y de los vehículos los cuales podrá propulsar este tipo de
motor.
El poder energético del aire comprimido está en proporción cuadrática a la presión, por lo que
aumentar la potencia y autonomía exige un diseño aerodinámico, mínimo peso y alto rendimiento
en la rodadura.
Motor:
El motor serie CAT’s 34 monoenergía, conlleva un dispositivo de control del recorrido de los
pistones y un único cigüeñal. Estos pistones son de etapas, una etapa motor y una etapa de
compresión y/o de expansión intermedia.
Tiene 4 pistones a dos etapas o sea 8 cámaras de compresión y/o de expansión que se utilizan
para comprimir el aire ambiente y rellenar los tanques, o bien para efectuar expansiones sucesivas
(Recuperación de energía térmica ambiente) y acerca de esta manera de la expansión isotérmica.
La fuerza propulsora se obtiene de la expansión del aire comprimido introducido en el cilindro (tal
como los motores de combustión interna) el cual impulsa los pistones que crean el movimiento
del cigüeñal.
Por ello se introduce el aire ambiente al cilindro el cual lo comprime a 20 bares y por tanto
aumenta su temperatura a 400 ºC. En estas condiciones lo traslada a la cámara esférica donde se
inyecta el aire a alta presión del estanque de aire comprimido. La mezcla de temperatura y presión
del aire en la cámara empuja el pistón el cual produce el movimiento. Otro aspecto importante de
este motor es el que está dotado del sistema de Punto Muerto Superior (Point Mort Haut) que
inmoviliza el pistón al final de la compresión durante un instante y así crear un volumen constante
dentro del cilindro. Esta propiedad es básica para que el régimen del motor sea el mayor posible.
Este proceso al final provoca la expansión del aire el cual se enfría que es como se expulsa por el
tubo de escape. En resumen el motor de aire comprimido de MDI tiene tres fases: la compresión,
la de inyección del aire comprimido y la de expansión.
El volante-motor está equipado con un motoalternador eléctrico de 5 kW. Este motor es
simultáneamente:
el motor del grupo en modo compresor
el motor de arranque
el alternador para la recarga de la batería
un moderador/freno eléctrico
una aportación momentánea de energía, por ejemplo para estacionarse.
Imagen 15. Diseño en CAD del motor CAT 34
No lleva embrague, el motor no funciona cuando el coche está parado y el arranque se hace sobre
el plato magnético para reactivar el grupo de aire comprimido. Las maniobras de aparcamiento
pueden efectuarse sobre el motor eléctrico.
El motor de aire no hace sino descargar la energía de una mezcla de aire comprimido a alta
presión que necesita de energía eléctrica para su compresión. Se calcula que son necesarios unos
5,5 kWh durante unas 4 horas para conseguir los 300 bares y luego obtener una autonomía de
unos 200 km o unas 10 horas en ciclo urbano (estimando una velocidad de unos 45 km/h). A una
velocidad de 110 km/h, que puede alcanzar perfectamente este motor de 25 CV, la autonomía se
reduciría a 70 km. En definitiva, se ofrece como una tecnología rentable para el transporte
colectivo urbano y el reparto de mercancía.
Automóvil:
El auto MDI CytiCat tiene un peso de unos 700 kg en vacio y con una carga útil de 500 kg. Para
reducir el peso este vehículo ha sido fabricado en fibra de vidrio (inyectada de poliuretano para
aislar del ruido y la temperatura exterior) sobre un bastidor de aluminio en el cual viene un
sistema de radio y un circuito de un solo hilo que une todos los dispositivos eléctricos del vehículo
en el cual se pueden ahorrar 22 kg de cableado.
Al no existir combustión, no hay emisiones de gases contaminantes. Su autonomía, es alrededor
de 200 a 300 Km ó 8 horas de circulación a velocidades 45 km/h, lo que le permite optar
al mercado urbano, donde el 80 % de los conductores realizan menos de 60 km diarios estimados.

Imagen 16. MDI city CAT
Como importante alternativa el coche lleva incorporado un pequeño compresor que permite
conectarlo a la red eléctrica y cargar completamente el depósito en 3 ó 4 horas. Debido a la
ausencia de combustión y, consecuentemente, de residuos, permite el cambio de aceite sólo cada
50.000 Km.
La temperatura del aire limpio expulsado por el tubo de escape está entre 0 y 15 grados bajo cero,
lo que permite reutilizarlo para el aire acondicionado interior sin necesidad de gases ni pérdida de
potencia.
Vehículo con motor eléctrico
Estos automóviles son impulsados por la tracción obtenida de motores eléctricos. Las razones por
la cual son interesantes este tipo de vehículos es el hecho de que no emiten gases de combustión,
ayudando a mantener un ambiente más limpio y sano en las grandes urbes, así como también son
autos con poco ruido, lo cual disminuye la contaminación acústica.
Los autos eléctricos se impulsan gracias a la energía que es acumulada en baterías, o también
existe la opción de hacerlo gracias a una célula de combustible de hidrógeno. El principio básico
para que un vehículo eléctrico esté en movimiento es el sistema de generación y acumulación de
la energía eléctrica, para lo cual se utilizan, por lo general, acumuladores electroquímicos (éstos
están formados por dos substancias conductoras bañadas en un líquido también conductor). El
intercambio entre ambos componentes de cargas positivas y negativas mantiene una corriente
eléctrica que puede ser utilizada para el funcionamiento de este tipo de coches.
El impulso de un auto eléctrico también puede darse por la electricidad que se genera al paso del
hidrógeno por una célula de combustible, en donde al hacer contacto con el oxígeno va a producir
los electrones necesarios para el funcionamiento del sistema, mientras que el residuo de esta
operación será tan sólo agua caliente pura.
En el motor de combustión, sólo el 18% de la energía del combustible es utilizada para mover el
vehículo, el resto sirve para accionar el motor. En el vehículo eléctrico el 46% de la energía
liberada por las baterías sirve para mover el vehículo, lo que indica una eficiencia entre 10-30%
superior de este respecto al vehículo convencional con motor de explosión.
El presente y futuro de las baterías del vehículo eléctrico parece pasar por la batería de ión de litio,
que cada vez se fabrica con mayor densidad de carga y longevidad permitiendo mover motores
más potentes, aunque por ahora la autonomía media de un utilitario eléctrico se encuentra en
torno a los 150 km. No obstante, deportivos eléctricos más caros han conseguido aumentar esa
autonomía hasta los 483 km, como el modelo de 70 kWh del Tesla Roadster.
Audi A2 eléctrico.
Como algunas novedades podemos mencionar que el 27 de octubre de este año, se logro que un
Audi A2, acondicionado para que funcione con motor eléctrico, recorriera 600 km con una sola
carga y sin detenerse. Este logro es fruto de un acuerdo de colaboración para la experimentación
con vehículos de cero emisiones entre la empresa DBM Energy y el gobierno alemán. el Audi con
velocidad máxima de 130 km/h recorrió los 600 km a una velocidad de 85 km/h en promedio.
Para conseguir tal autonomía, el punto clave del A2 eléctrico está en sus baterías, que han sido
fabricadas con un polímero de ion de nueva generación de DBM Energy, el cual ha sido
denominado como KOLIBRI AlphaPolymer Technology. Esta tecnología permite además una
recarga ultra-rápida en seis minutos conectándolo a una fuente de alto voltaje.
Imagen 17. Audi A2 Electrico
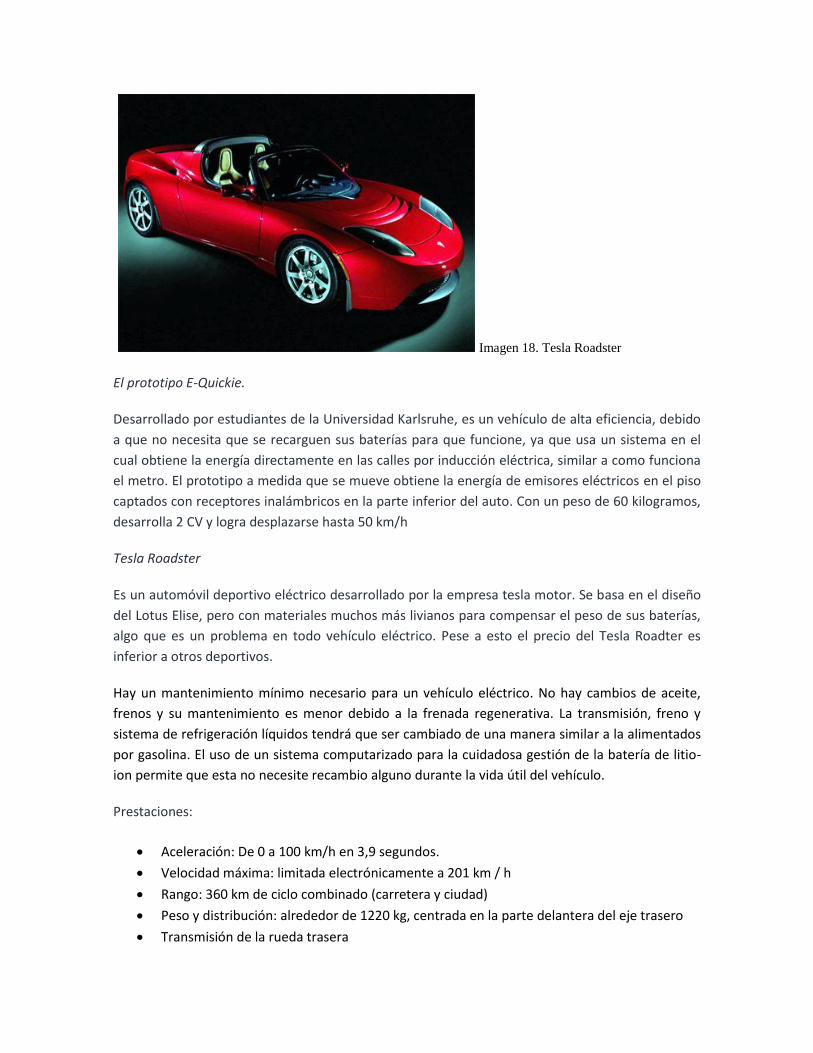
Imagen 18. Tesla Roadster
El prototipo E-Quickie.
Desarrollado por estudiantes de la Universidad Karlsruhe, es un vehículo de alta eficiencia, debido
a que no necesita que se recarguen sus baterías para que funcione, ya que usa un sistema en el
cual obtiene la energía directamente en las calles por inducción eléctrica, similar a como funciona
el metro. El prototipo a medida que se mueve obtiene la energía de emisores eléctricos en el piso
captados con receptores inalámbricos en la parte inferior del auto. Con un peso de 60 kilogramos,
desarrolla 2 CV y logra desplazarse hasta 50 km/h
Tesla Roadster
Es un automóvil deportivo eléctrico desarrollado por la empresa tesla motor. Se basa en el diseño
del Lotus Elise, pero con materiales muchos más livianos para compensar el peso de sus baterías,
algo que es un problema en todo vehículo eléctrico. Pese a esto el precio del Tesla Roadter es
inferior a otros deportivos.
Hay un mantenimiento mínimo necesario para un vehículo eléctrico. No hay cambios de aceite,
frenos y su mantenimiento es menor debido a la frenada regenerativa. La transmisión, freno y
sistema de refrigeración líquidos tendrá que ser cambiado de una manera similar a la alimentados
por gasolina. El uso de un sistema computarizado para la cuidadosa gestión de la batería de litio-
ion permite que esta no necesite recambio alguno durante la vida útil del vehículo.
Prestaciones:
Aceleración: De 0 a 100 km/h en 3,9 segundos.
Velocidad máxima: limitada electrónicamente a 201 km / h
Rango: 360 km de ciclo combinado (carretera y ciudad)
Peso y distribución: alrededor de 1220 kg, centrada en la parte delantera del eje trasero
Transmisión de la rueda trasera

Batería:
Tipo de batería: Batería de ion de litio (La mayoría de las baterías en computadoras
portátiles utilizan este tipo de celdas de litio-ion)
Tiempo de carga completa: 3 horas y media
Estimación de la vida de la batería: más de 160000 km
Energía eléctrica: alrededor de 53 kW h
Peso total: entre 400 y 450 kg
El término propulsión híbrida es utilizado para referirse a vehículos con más de una fuente de
propulsión. Los sistemas híbridos pueden incorporar varios tipos de acumuladores de energía y/o
conversores de energía.
Motores Híbridos.
El objetivo del desarrollo de las tecnologías híbridas es combinar dos fuentes de energía, de
manera que las cualidades de cada sistema sean utilizadas bajo condiciones de generación
variables, de tal forma que las ventajas globales del desarrollo del sistema híbrido pesen más que
el costo de su configuración.
En este trabajo se presenta una clasificación de los vehículos híbridos, una descripción de la
tecnología incluyendo ventajas y desventajas de este tipo de vehículos, experiencias realizadas,
una comparación con motores convencionales y por último una descripción del sistema híbrido del
tipo turbina-eléctrico.
Soluciones Motor Combustión Interna - eléctricas
Aquellos híbridos que combinan un motor de combustión interna (MCI) y un motor eléctrico son
los únicos sistemas híbridos que han tenido un desarrollo serio. Existen dos tipos básicos de
sistema: híbridos en serie e híbridos en paralelo.
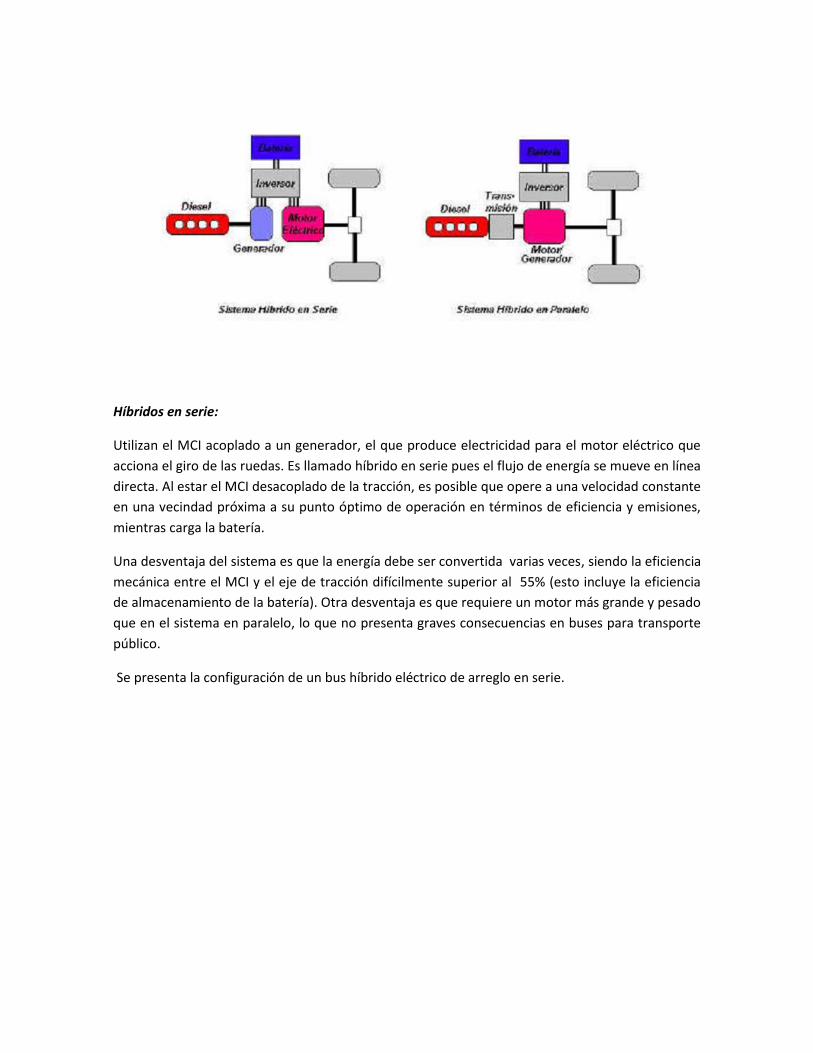
Híbridos en serie:
Utilizan el MCI acoplado a un generador, el que produce electricidad para el motor eléctrico que
acciona el giro de las ruedas. Es llamado híbrido en serie pues el flujo de energía se mueve en línea
directa. Al estar el MCI desacoplado de la tracción, es posible que opere a una velocidad constante
en una vecindad próxima a su punto óptimo de operación en términos de eficiencia y emisiones,
mientras carga la batería.
Una desventaja del sistema es que la energía debe ser convertida varias veces, siendo la eficiencia
mecánica entre el MCI y el eje de tracción difícilmente superior al 55% (esto incluye la eficiencia
de almacenamiento de la batería). Otra desventaja es que requiere un motor más grande y pesado
que en el sistema en paralelo, lo que no presenta graves consecuencias en buses para transporte
público.
Se presenta la configuración de un bus híbrido eléctrico de arreglo en serie.

Bus híbrido eléctrico en serie
1. Motor eléctrico
2. Compresor y bomba de dirección
3. Ventilador para motor eléctrico
4. Motor Diesel con alternador
5. Ventilador para ventilación de baterías
6. Control electrónico
7. Baterías
8. Equipo enfriamiento de baterías
9. Resistor de freno.
Dependiendo de la aplicación particular, el sistema eléctrico es diseñado para que los
rendimientos sean aproximadamente similares al de un bus diesel estándar.

Híbridos en paralelo
Utilizan tanto el MCI como el eléctrico para accionar la tracción, asignando la energía de cada uno
de acuerdo a las condiciones de conducción. Es llamado híbrido en paralelo pues la energía fluye
en líneas paralelas. En este sistema, el MCI puede accionar la tracción al mismo tiempo que carga
las baterías.
Estos tipos de vehículos son los más populares y sobre los que más se investiga. Se pueden
categorizar en cuatro tipos, de acuerdo a como combinan su energía, que se describen a
continuación.
Combinación de fuerzas de tracción: el torque producido en cada motor es entregado a distintos
pares de ruedas, por ejemplo, el motor eléctrico entrega torque a las ruedas traseras, mientras
que el segundo motor entrega torque al tren delantero.
Combinación de torques: el torque de ambos motores es combinado mediante un arreglo de ejes
antes de ser aplicado a la transmisión.
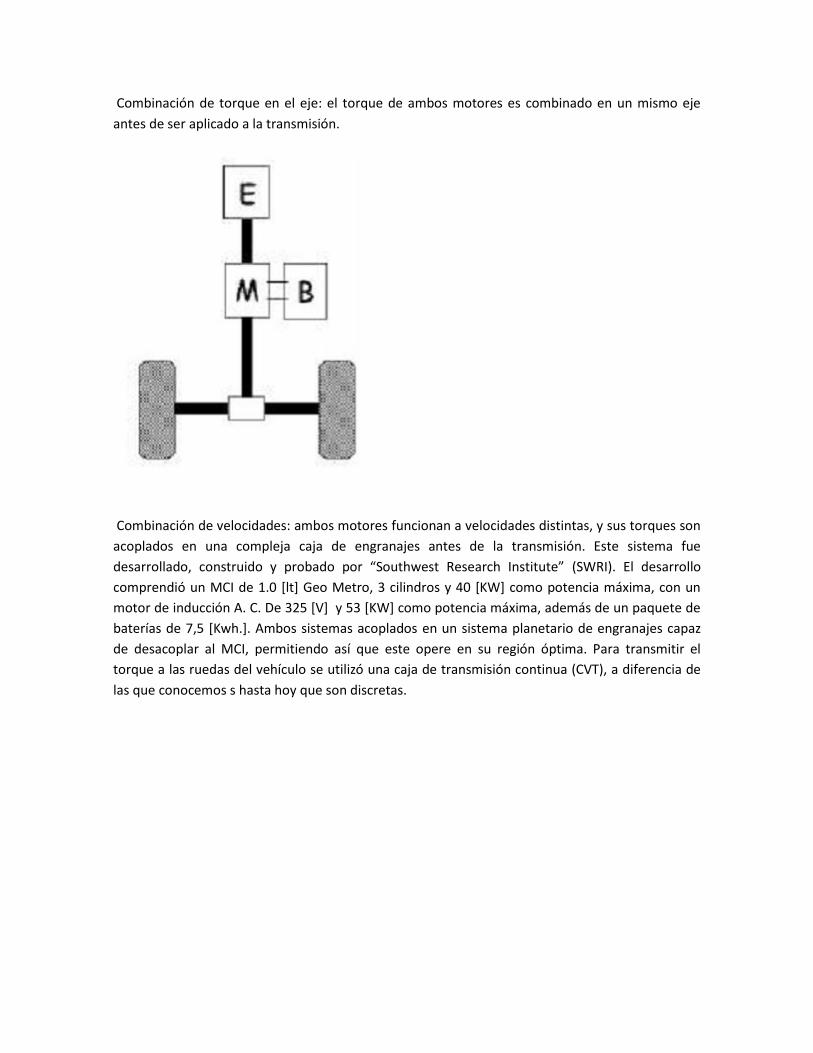
Combinación de torque en el eje: el torque de ambos motores es combinado en un mismo eje
antes de ser aplicado a la transmisión.
Combinación de velocidades: ambos motores funcionan a velocidades distintas, y sus torques son
acoplados en una compleja caja de engranajes antes de la transmisión. Este sistema fue
desarrollado, construido y probado por “Southwest Research Institute” (SWRI). El desarrollo
comprendió un MCI de 1.0 [lt] Geo Metro, 3 cilindros y 40 [KW] como potencia máxima, con un
motor de inducción A. C. De 325 [V] y 53 [KW] como potencia máxima, además de un paquete de
baterías de 7,5 [Kwh.]. Ambos sistemas acoplados en un sistema planetario de engranajes capaz
de desacoplar al MCI, permitiendo así que este opere en su región óptima. Para transmitir el
torque a las ruedas del vehículo se utilizó una caja de transmisión continua (CVT), a diferencia de
las que conocemos s hasta hoy que son discretas.

La tecnología híbrida fue diseñada para operar en zonas urbanas, donde existan problemas de
polución ambiental, por lo que el sistema híbrido es muy adecuado para cumplir con el objetivo de
reducción de emisiones contaminantes atmosféricas, especialmente en buses de transporte
público. Operando únicamente como vehículo eléctrico, con la energía guardada en las baterías,
tienen una autonomía de 80 a 200 km.
Elementos característicos:
Sistema de frenos regenerativo: Al desacelerar o frenar, el motor eléctrico actúa como
generador, recuperando la energía cinética desde las ruedas, convirtiéndola en
electricidad que puede ser guardada en la batería. Frenos de fricción tradicionales son
requeridos, así como un sistema de control electrónico que permita maximizar la
recuperación de energía y pueda operar el sistema dual de frenos. Sistemas comerciales
en uso permiten recuperar alrededor de un 30% de la energía cinética típicamente perdida
como calor en frenos de fricción. La energía recuperada al freno puede reducir el consumo
energético en 15% en conducción en ciudad.
Generador: Un generador sincrónico de corriente alterna produce la electricidad para
cargar las baterías. Funciona también como motor de partida para el motor diesel.
Motor eléctrico: Un motor sincrónico de corriente alterna, compacto, de bajo peso y alta
eficiencia.
Inversor: El inversor cambia la corriente continua de la batería en corriente alterna para
mover el motor eléctrico, y cambia la corriente alterna del generador en corriente
continua para cargar la batería. También varía la frecuencia de la corriente, dependiendo
de las revoluciones del motor eléctrico para maximizar la eficiencia. El inversor debe ser
enfriado por agua.
Divisor de potencia (híbridos en paralelo) : El sistema híbrido en paralelo necesita de un
divisor de potencia, que utiliza un engrane planetario que distribuye el giro del motor C.I

entre la tracción y el generador. Controlando las revoluciones del generador, el divisor
funciona también como una transmisión continua y variable.
Baterías: Se utilizan las baterías diseñadas para vehículos eléctricos, requiriendo una alta
densidad de energía, peso liviano y una larga vida.
Ultracapacitores: Se ha desarrollado también la tecnología de ultracapacitores para el
almacenamiento de la energía. Al no depender de reacciones químicas (como las baterías)
pueden ser cargados y descargados rápidamente. El ultracapacitor entrega la energía
almacenada en él, como un pulso eléctrico poderoso. Se encuentran en etapa de
desarrollo comercial.


Conclusión
Si bien el motor de combustión interna de combustibles fósiles, es el más utilizado y masificado en
estos días, no es necesariamente el más económico ni tampoco el más eficiente tipo de motor que
se encuentre en estos momentos en el mercado.
Quizás dichos puntos en este momento sean ciertos, no implica que siempre fue asi. Con el
desarrollo de nuevas tecnologías han ido evolucionando distintos tipos de motores y alimentación
a estos, lo cual hace que este panorama recién planteado sea efectivo.
Según nuestra investigación el motor que, con similares características de uso resultó ser el más
eficiente será el motor eléctrico, pero solo se pudo llegar a eso debido al bajo costo relativo de la
energía eléctrica, las nuevas y mejores tecnologías de almacenamiento y finalmente pero no
menos importante el desarrollo de nuevos materiales para mejorar la eficiencia de los motores
eléctricos.
Entonces, el porqué solo recientemente se empezó a masificar los motores eléctricos y no antes.
La respuesta será, como apreciación personal, que a pesar de esta poca eficiencia y la
contaminación inherentes de la utilización de combustibles fósiles, era mucho más barato hace no
muchos años, utilizar dichos combustibles en comparación de los, por ejemplo, sistemas
eléctricos.
Top Related