




![moon.vn · Web view[533614]: Cho mạch điện xoay chiều AB gồm hai đoạn mạch AM và MB ghép nối tiếp, AM gồm R1 nối tiếp tụ điện C, MB gồm R2 nối tiếp](https://static.fdocuments.net/doc/165x107/5e4dff7e3fd03e22022337c2/moonvn-web-view-533614-cho-mch-in-xoay-chiu-ab-gm-hai-on.jpg)


Languages
Pages
Legal


TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
VIỆN ĐIỆN
BỘ MÔN TỰ ĐỘNG HÓA XÍ NGHIỆP CÔNG NGHIỆP
BÁO CÁO BÀI TẬP LỚN
ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
GV hướng dẫn: Vũ Hoàng Phương
Sinh viên: Nguyễn Văn Tiềm
SHSV: 2010 2302
Lớp: ĐK&TĐH 6 – K55
Học kỳ: 2/2013-2014

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
MỤC LỤC
ĐỀ BÀI ............................................................................................................. 3
Phần 1. HỆ TRUYỀN ĐỘNG ĐỘNG CƠ MỘT CHIỀU ........................... 5
1.1. Tính chọn mạch lực ................................................................... 5
1.1.1. Chỉ tiêu về dòng điện .................................................... 5
1.1.2. Chỉ tiêu về điện áp ........................................................ 6
1.1.3. Chọn van ....................................................................... 6
1.2. Điều khiển vòng hở ................................................................... 6
1.2.1. Cấu trúc điều khiển vòng hở ........................................ 6
1.2.2. Nguyên tắc điều khiển dọc ........................................... 8
1.2.3. Khâu tạo điện áp tựa ..................................................... 9
1.2.4. Khâu tạo xung kép ........................................................ 9
1.2.5. Khâu tạo xung chùm ................................................... 10
1.2.6. Kết quả mô phỏng ...................................................... 11
1.3. Điều khiển phản hồi vòng kín ................................................. 13
1.3.1. Vòng dòng điện .......................................................... 13
1.3.2. Vòng điện áp............................................................... 15
Phần 2. BỘ BIẾN ĐỔI BUCK ..................................................................... 18
2.1. Mô hình tín hiệu trung bình .................................................... 18
2.1.1. Phương pháp trung bình không gian trạng thái .......... 18
2.1.2. Nhận xét đặc điểm mô hình ........................................ 20
2.2. Điểm làm việc xác lập của mô hình ........................................ 20
2.3. Mô hình tín hiệu nhỏ ............................................................... 21
2.4. Cấu trúc điều khiển ................................................................. 22
2.4.1. Điều khiển trực tiếp (điện áp) ..................................... 22
2.4.2. Điều khiển gián tiếp (dòng điện trung bình) .............. 25

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
TÀI LIỆU THAM KHẢO ............................................................................ 32

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
ĐỀ BÀI
Bài tập 1. Thiết kế hệ truyền động động cơ một chiều có tham số chỉ ra trong
Bảng 1, sử dụng chỉnh lưu cầu ba pha điều khiển hoàn toàn sử dụng Tiristor.
Tính chọn mạch lực
Điều khiển vòng hở, sử dung hai phương pháp phát xung sau đây để điều khiển
mạch lực cầu ba pha Tiristor
- Điều khiển theo phương pháp xung kép (độ rộng xung là 20e-5s)
- Điều khiển theo phương pháp xung chum (Tần số xung chùm fx = 10kHz)
- Yêu cầu: Thu thập dữ liệu về điện áp phần ứng, dòng điện phần ứng và tốc
độ quay động cơ bằng phần mềm Matlab
Tổng hợp mạch vòng dòng điện, tốc độ đảm bảo tốc độ bám theo tốc độ đặt
Lượng đặt tốc độ cho hệ truyền động một chiều
- Yêu cầu: Thu thập dữ liệu về điện áp phần ứng, dòng điện phần ứng và dòng
điện phần ứng đặt (đầu ra bộ điều chỉnh tốc độ), tốc độ quay của động cơ và
tốc độ đặt phần mềm Matlab
BẢNG 1: Tham số động cơ một chiều 𝟐𝟎𝟎𝑯𝑷 kích từ độc lập
PHẦN TỬ THÔNG SỐ
Điện trở phần ứng, 𝑹𝒂 0.0597 (Ω)
Điện cảm phần ứng. 𝑳𝒂 0.0009 (H) Điện trở phần kích từ, 𝑹𝒇 150 (Ω) Điện cảm phần kích từ, 𝑳𝒇 112.5 (H) Điện cảm hỗ trợ, 𝑳𝒂𝒇 2.621 (H)
Momment quán tính, 𝑱 5 (kgm2)
Điện áp kích từ, 𝑼𝒇 150 (V)
Tốc độ định mức, 𝝎𝒅𝒎 1750 (rpm)
Điện cảm nối tiếp mạch phần ứng động cơ, 𝑳𝒖 15 (mH)

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Bài tập 2. Bộ biến đổi Buck có tham số cho như Bảng 2 làm việc trong chế độ
dòng điện liên tục (CCM) và được điều khiển theo phương pháp điều chế độ rộng
xung PWM, và khóa bán dẫn là lý tưởng
Xây dựng mô hình tín hiệu trung bình của các bộ biến đổi trên theo phương
pháp không gian trạng thái, nhận xét đặc điểm mô hình.
Tính điểm làm việc xác lập của mô hình.
Xây dựng mô hình tín hiệu nhỏ dựa trên phương pháp mô hình mạng đóng
cắt và không gian trạng thái (SSA).
Thiết kế cấu trúc điều khiển cho bộ biến đổi trên theo chế độ:
- Điều khiển điện áp.
- Điều khiển dòng điện.
Kiểm chứng kết quả mô hình hóa và thiết kế bằng phần mềm Matlab.
BẢNG 2.1: Tham số bộ biến đổi Buck
PHẦN TỬ THÔNG SỐ
Điện áp vào, 𝒖𝒊𝒏 28 (V) Điện áp ra, 𝒖𝟎 15 (V) Điện cảm, 𝑳 50 (μH) Điện cảm tụ, 𝑪 500 (μF) Điện trở tụ, 𝒓𝑪 0.1 (Ω) Tần số phát xung, 𝒇𝒙 100 (kHz)
Điện trở tải, 𝑹 3 (Ω)

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Phần 1. HỆ TRUYỀN ĐỘNG ĐỘNG CƠ MỘT CHIỀU
1.1. Tính chọn mạch lực
Phương pháp được dùng là chọn van theo chỉ tiêu về dòng điện và chỉ tiêu về
điện áp [1].
Hình 1.1. Sơ đồ lắp mạch thyristor cầu ba pha.
Từ bảng thông số động cơ ta tính được công suất động cơ quy đổi:
𝑃 = 200𝐻𝑃 = 200 × 0.746𝑘𝑊 = 149.2 (𝑘𝑊)
Sau khi tính toán và thực hiện mô phỏng kiểm tra (cho động cơ chạy với tốc độ
định mức) ta thu được giá trị định mức về dòng và áp của động cơ là:
𝑈𝑑 ≈ 500 (𝑉) và I𝑑 ≈300 (A)
1.1.1. Chỉ tiêu về dòng điện
Từ tham số của mạch chỉnh lưu 3 pha hình cầu và dòng điện định mức tải, ta
xác định được giá trị trung bình dòng điện thực tế qua từng van:
Itbv = Id3 =
300
3= 100 (A)
ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Với các tải dòng điện lớn, do sự phát nhiệt trên van mạnh, thường phải giảm
dòng qua nó nên cần tăng hệ số dự trữ lên 𝑘𝐼𝑣 = 1,5 ÷ 2, ta chọn 𝑘𝐼𝑣 = 1,7. Do
đó dòng trung bình qua van cho phép:
Iv > kIv × Itbv = 1.8 × 100 = 180 (A)
1.1.2. Chỉ tiêu về điện áp
Với chỉ tiêu này ta tính toán điện áp ngược tối đa đặt lên van trong quá trình
làm việc. Từ bảng tham số và điện áp định mức tải ta có:
Ungmax = 2.45 × U2 = 2.45 ×Udđm2.34
= 2.45 ×500
2.34= 523.5 (V)
Hệ số dự trữ về điện áp cho van thường lấy trong khoảng 1.7 ÷ 2.2, ta chọn
𝑘𝑈𝑣 = 2. Do đó điện áp trung bình qua van cho phép:
Uv > kUv ∙ Ungmax = 2 × 523.5 = 1047 (V)
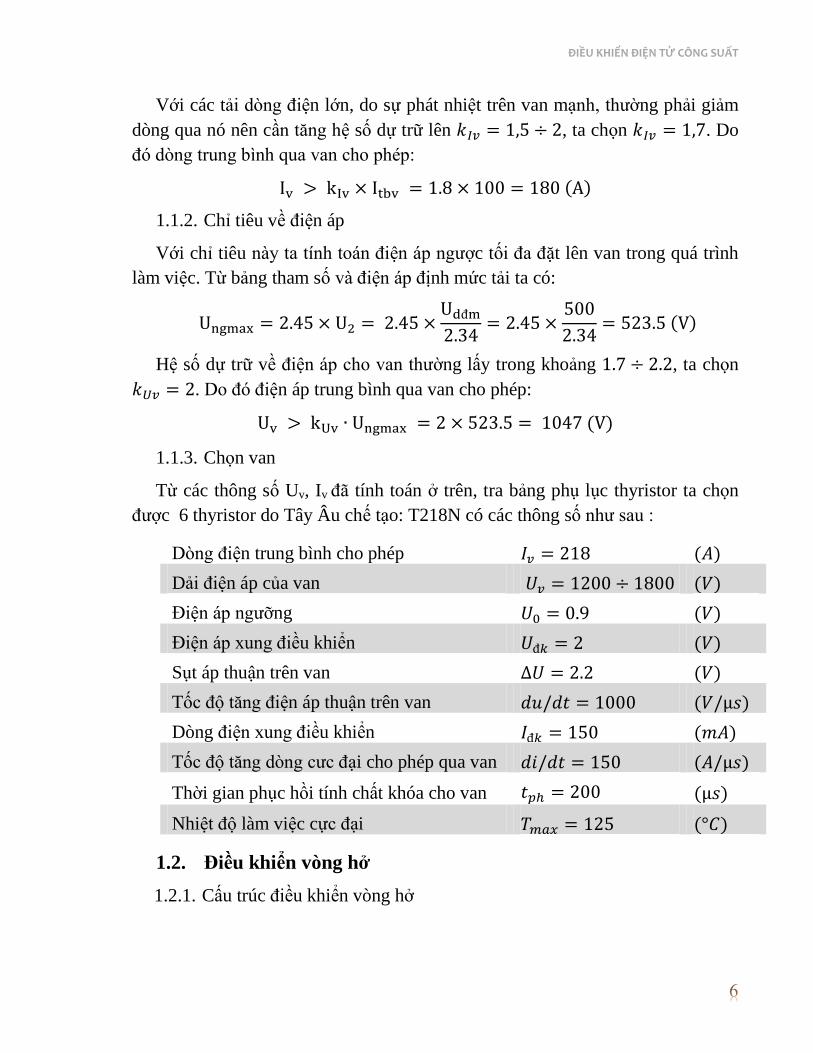
1.1.3. Chọn van
Từ các thông số Uv, Iv đã tính toán ở trên, tra bảng phụ lục thyristor ta chọn
được 6 thyristor do Tây Âu chế tạo: T218N có các thông số như sau :
Dòng điện trung bình cho phép 𝐼𝑣 = 218 (𝐴)
Dải điện áp của van 𝑈𝑣 = 1200 ÷ 1800 (𝑉)
Điện áp ngưỡng 𝑈0 = 0.9 (𝑉)
Điện áp xung điều khiển 𝑈đ𝑘 = 2 (𝑉)
Sụt áp thuận trên van ∆𝑈 = 2.2 (𝑉)
Tốc độ tăng điện áp thuận trên van 𝑑𝑢/𝑑𝑡 = 1000 (𝑉/μ𝑠)
Dòng điện xung điều khiển 𝐼đ𝑘 = 150 (𝑚𝐴)
Tốc độ tăng dòng cưc đại cho phép qua van 𝑑𝑖/𝑑𝑡 = 150 (𝐴/μ𝑠)
Thời gian phục hồi tính chất khóa cho van 𝑡𝑝ℎ = 200 (μ𝑠)
Nhiệt độ làm việc cực đại 𝑇𝑚𝑎𝑥 = 125 (°𝐶)
1.2. Điều khiển vòng hở
1.2.1. Cấu trúc điều khiển vòng hở

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 1.2. Cấu trúc điều khiển vòng hở.
Một cách truyền thống, cấu trúc truyền động động cơ một chiều điều khiển
vòng hở có thể chia thành các khối: khối nguồn, khối driver, khối thyristor và động
cơ một chiều.
Tín hiệu điều khiển Udk đưa vào driver, driver xử lý tín hiệu này và đưa ra các
tín hiệu đóng mở các van thyristor, đầu ra của khối thyristor là điện áp cấp cho
động cơ, khối nguồn có nhiệm vụ cấp các mức điện áp phù hợp chp driver và
tryristor.
Hình 1.3. Cấu trúc khâu nguồn (a), Sơ đồ lắp động cơ (b)
Trong phạm vi của báo cáo này em xin chỉ trình bày chi tiết khối driver để đáp
ứng yêu cầu điều khiển bằng xung kép và xung chùm. Driver sẽ được trình bầy

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
qua 4 phần nhỏ là: nguyên tắc điều khiển dọc, khâu tạo điện áp tựa, khâu tạo xung
khép và khâu tạo xung chùm.
1.2.2. Nguyên tắc điều khiển dọc
Hình 1.4. Cấu trúc Driver nguyên tắc điều khiển dọc
Mạch điều khiển chỉnh lưu có các nhiệm vụ xoay quanh vấn đề phát xung điều
khiển cho van lực của mạch. Cơ bản có hai hệ điều khiển là hệ đồng bộ và không
đồng bộ, tuy nhiên để đáp ứg về yêu cầu ổn định cũng như chất lượng của điều
khiển mà trong thực tế đại đa số các mạch điều khiển chỉnh lưu thực hiện theo hệ
đồng bộ. Trong hệ đồng bộ lại có hai nguyên tắc điều khiển là: điều khiển ngang
và điều khiển dọc.
Trong nguyên tắc điều khiển dọc khâu Utựa tạo ra điện áp có dạng cố định theo
chu kì do nhịp đồng bộ của Uđp. Khâu so sánh xác định điểm cân bằng của 2 điện
áp Utựa và Uđk để phát động khâu tạo xung tạo xung. Như vậy thời điểm phát xung
mở van (góc điều khiển ) thay đổi do sự thay đổi trị số của Uđk, trên đồ thị là sự di
chuyển theo chiều dọc của trục biên độ. Sự phụ thuộc vào Uđk này là tuyến tính

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
nên việc điều khiển sẽ thuận lợi hơn, vì vậy ta cũng chọn nguyên tắc điều khiển
dọc cho mạch điều khiển.
1.2.3. Khâu tạo điện áp tựa
Hình 1. 5. Sơ đồ điều chế và dạng của xung tựa dạng răng cưa sường xuống
Như ta đã biết, điện áp đầu ra chỉnh lưu nhận được có quan hệ tỉ lệ nghịch với
góc điều khiển theo công thức:
𝑈𝑑 = 𝑈𝑑0 ∙ cos 𝛼
Nên trong bài này em sử dụng điện áp tựa dạng răng cưa sườn xuống, như vậy
điện áp răng cưa Uc,m sẽ tỉ lệ nghịch với góc điều khiển α , nghĩa là điện áp điều
khiển Uđk sẽ tỉ lệ thuận với điện áp ra Ud sau chỉnh lưu.
1.2.4. Khâu tạo xung kép
Hình 1.6. Sơ đồ tạo xung kép trong khâu tạo xung và kết quả mô phỏng

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Tín hiệu so sánh thực chất là một xung rộng có độ rộng 180° − 𝛼 (tính theo
độ), sau khi nó được đưa qua bộ hạn chế xung, xung chỉ còn độ rộng 0.2𝑚𝑠 lúc
này nó được gọi là một xung đơn.
Để có một xung kép ta dùng bộ hoặc (OR), cách làm là một xung đơn điều
khiển thyristor sẽ được OR với một xung đơn ngay sau đó:
1 OR 3
2 OR 4
4 OR 6
Mạch cầu 3 pha có 6 van mở lần lượt trong một chù kỳ 𝑇 tức là góc 360° vì
vậy các van mở cách nhau 60°. Như vậy xung kép mở một van sẽ gồm một xung
đơn và một xung đơn được nhắc lại sau 60°.
1.2.5. Khâu tạo xung chùm
Hình 1.7. Sơ đồ tạo xung chùm trong khâu tạo xung và kết quả mô phỏng
USS được AND với một tín hiệu dao động có chu kì 𝑇𝑑𝑑 = 0.1𝑚𝑠. Như vậy
đầu ra là một xung chùm có độ động là độ rộng của xung so sánh 180° − 𝛼, và
chu kỳ xung là chu kỳ xung của xung dao động (hình 1.7)

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 1.8. Sơ đồ tạo xung chùm hạn chế và kết quả mô phỏng
Ngoài ra, trước khi thực hiện AND với xung dao động nếu ta đưa USS này qua
bộ hạn chế xung, thì đầu ra ta sẽ được xung chùm hạn chế với độ rộng xung do
khâu hạn chế xung quyết định còn chu kỳ xung vẫn là chu kỳ xung của xung dao
động (hình 1.8)
1.2.6. Kết quả mô phỏng

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 1.9. Kết quả mô phỏng điều khiển vòng hở
ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
1.3. Điều khiển phản hồi vòng kín
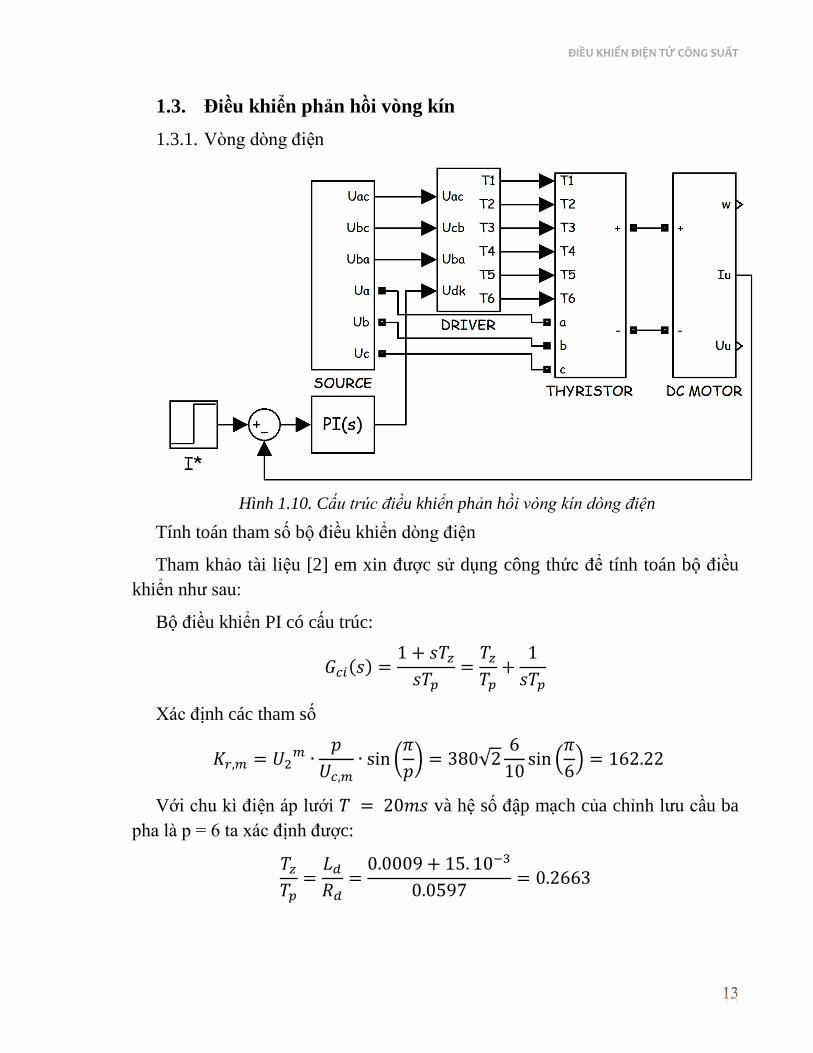
1.3.1. Vòng dòng điện
Hình 1.10. Cấu trúc điều khiển phản hồi vòng kín dòng điện
Tính toán tham số bộ điều khiển dòng điện
Tham khảo tài liệu [2] em xin được sử dụng công thức để tính toán bộ điều
khiển như sau:
Bộ điều khiển PI có cấu trúc:
𝐺𝑐𝑖(𝑠) =1 + 𝑠𝑇𝑧𝑠𝑇𝑝
=𝑇𝑧𝑇𝑝+
1
𝑠𝑇𝑝
Xác định các tham số
𝐾𝑟,𝑚 = 𝑈2𝑚 ∙
𝑝
𝑈𝑐,𝑚∙ sin (
𝜋
𝑝) = 380√2
6
10sin (
𝜋
6) = 162.22
Với chu kì điện áp lưới 𝑇 = 20𝑚𝑠 và hệ số đập mạch của chỉnh lưu cầu ba
pha là p = 6 ta xác định được:
𝑇𝑧𝑇𝑝=𝐿𝑑𝑅𝑑
=0.0009 + 15. 10−3
0.0597= 0.2663

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
𝑇𝑝 =𝐾𝑟,𝑚. 𝑇
𝑝𝑅𝑑=162.22 × 0.02
6 × 0.597= 9
Vậy bộ điều khiển dòng điện:
↪ 𝐺𝑐𝑖(𝑠) = 0.2663 +0.1111
𝑠
Kết quả mô phỏng:

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 1.11. Phản hồi dòng điện phần ứng với giá trị đặt 200 A và 280 A,
Điện áp phần ứng và Điện áp điều khiển
1.3.2. Vòng điện áp

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 1.12. Cấu trúc điều khiển phản hồi vòng kín dòng điện
Bộ diều khiển dòng điện bên trong có thành phần tích phân, giúp hạ bậc đối
tượng, theo lý thyết điều khiển truyền động điện, bộ điều chỉnh tốc độ được tổng
hợp theo tiêu chuẩn tối ưu môdun, có thể xác định được hàm truyền của bộ điều
chỉnh tốc độ là khâu tỷ lệ [4]:
𝐺𝑐𝜔 =𝐾𝑖𝐾Φ𝑇𝑐𝑅ư𝐾𝜔
∙1
2𝑇𝑠′𝑎𝑠
= 𝐾𝑝
Sau khi tính toán và mô phỏng, em chọn được 𝐺𝑐𝜔 = 350.
Kết quả mô phỏng:

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 1.13. Kết quả mô phỏng điều khiển động cơ hai vòng phản hồi kín

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Phần 2. BỘ BIẾN ĐỔI BUCK
2.1. Mô hình tín hiệu trung bình
2.1.1. Phương pháp trung bình không gian trạng thái
Hình 2.1. Mô hình trung bình bộ biến đổi buck
(a) tổng quát, (b) trạng thái 1, (c) trạng thái 2
Sử dụng định luật KV ta có hệ phương trình mô tả sơ đồ mạch điện của bộ bu
biến đổi ck trong trạng thái 1.
{
𝐿
𝑑𝑖𝐿𝑑𝑡
= −𝑢0 + 𝑢𝑖𝑛
𝐶𝑑𝑢𝐶𝑑𝑡
=𝑅
𝑅 + 𝑟𝐶𝑖𝐿 −
𝑅
𝑅 + 𝑟𝐶𝑢𝐶
𝑢𝑜 =𝑅
𝑅 + 𝑟𝐶(𝑟𝐶𝑖𝐿 + 𝑢𝐶)
(1)
Hệ phương trình (1) được viết lại theo dạng không gian trạng thái với dạng ma
trận:
{
𝑑𝒙
𝑑𝑡= 𝑨1𝒙 + 𝑩1𝑢
𝑦 = 𝑪1𝑥 + 𝑫1𝑢 (2)
Trong đó:

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
𝑨1 =
[ −1
𝐿
𝑅𝑟𝐶𝑅 + 𝑟𝐶
−1
𝐿
𝑅
𝑅 + 𝑟𝐶1
𝐶
𝑅
𝑅 + 𝑟𝐶−1
𝐶
1
𝑅 + 𝑟𝐶]
; 𝑩1 = [1
𝐿0] ; 𝑪1 = [
𝑅𝑟𝐶𝑅 + 𝑟𝐶
𝑅
𝑅 + 𝑟𝐶] ; 𝑫𝟏 = 𝟎
(3)
Sử dụng định luật KV ta có hệ phương trình mô tả sơ đồ mạch điện của bộ buck
trong trạng thái 2:
{
𝐿
𝑑𝑖𝐿𝑑𝑡
= −𝑢0
𝐶𝑑𝑢𝐶𝑑𝑡
=𝑅
𝑅 + 𝑟𝐶𝑖𝐿 −
𝑅
𝑅 + 𝑟𝐶𝑢𝐶
𝑢𝑜 =𝑅
𝑅 + 𝑟𝐶(𝑟𝐶𝑖𝐿 + 𝑢𝐶)
( 4)
Hệ phương trình (4) được viết lại theo dạng không gian trạng thái với dạng ma
trận:
{
𝑑𝒙
𝑑𝑡= 𝑨2𝒙 + 𝑩2𝑢
𝑦 = 𝑪2𝑥 + 𝑫2𝑢 (5)
Trong đó:
𝑨2 =
[ −
𝑅𝑟𝐶𝑅 + 𝑟𝐶
−𝑅
𝑅 + 𝑟𝐶𝑅
𝑅 + 𝑟𝐶−
1
𝑅+𝑟𝐶 ]
; 𝑩2 = [00] ; 𝑪2 = [
𝑅𝑟𝐶𝑅 + 𝑟𝐶
𝑅
𝑅 + 𝑟𝐶] ; 𝑫𝟐 = 𝟎
(6)
Như vậy, bộ biến đổi kiểu Buck được mô tả trên không gian trạng thái theo
dạng chuẩn như sau:
{
𝑑𝒙
𝑑𝑡= 𝑨𝒙 + 𝑩𝑢
𝑦 = 𝑪𝑥 + 𝑫𝑢 (7)

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
↔
{
[��𝐿��𝐶] =
[ −1
𝐿
𝑅𝑟𝐶𝑅 + 𝑟𝐶
−1
𝐿
𝑅
𝑅 + 𝑟𝐶1
𝐶
𝑅
𝑅 + 𝑟𝐶−1
𝐶
1
𝑅 + 𝑟𝐶]
[𝑖𝐿𝑢𝐶] + [𝑑
1
𝐿0] 𝑢𝑖𝑛
𝑢𝑜 = [𝑅𝑟𝐶𝑅 + 𝑟𝐶
𝑅
𝑅 + 𝑟𝐶] [𝑖𝐿𝑢𝐶]
(8)
Trong đó:
𝑨 = [𝑑𝑨1 + (1 − 𝑑)𝑨2] =
[ −1
𝐿
𝑅𝑟𝐶𝑅 + 𝑟𝐶
−1
𝐿
𝑅
𝑅 + 𝑟𝐶1
𝐶
𝑅
𝑅 + 𝑟𝐶−1
𝐶
1
𝑅 + 𝑟𝐶]
𝑩 = [𝑑𝑩1 + (1 − 𝑑)𝑩2] = [𝑑1
𝐿0]
𝑪 = [𝑑𝑪1 + (1 − 𝑑)𝑪2] = [𝑅𝑟𝐶𝑅 + 𝑟𝐶
𝑅
𝑅 + 𝑟𝐶]
𝑫 = [𝑑𝑫1 + (1 − 𝑑)𝑫2] = 𝟎 (9)
Thay số ta được mô hình tín hiệu trung bình cụ thể cho mạch buck converter
theo đề bài:
{
[��𝐿��𝐶] =
2 ∙ 104
31[−3 −303 −1
] [𝑖𝐿𝑢𝐶] + 2 ∙ 104 [
𝑑0] 𝑢𝑖𝑛
𝑢𝑜 =3
31[1 10] [
𝑖𝐿𝑢𝐶]
(10)
2.1.2. Nhận xét đặc điểm mô hình
2.2. Điểm làm việc xác lập của mô hình
Điểm làm việc xác lập được mô tả theo xác định bằng cách từ hệ phương tình
mô hình (7) , cho các đạo hàm bằng không, các đại lượng ở trạng thái xác lập nên:
{0 = 𝐀𝐬𝐬𝐗 + 𝐁𝐬𝐬UY = 𝐂𝐬𝐬𝐗 + 𝐃𝐬𝐬U
Kết hợp với các phương trình (9) ta có điểm làm việc xác lập của mô hình được
biểu diễn ở hệ phương trình:

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
{
𝑈𝑜 = 𝑈𝐶 𝑈𝐶 = 𝑅𝐼𝐿 𝑈𝑜 = 𝐷𝑈𝑖𝑛
ℎ𝑎𝑦 {
𝑈𝑜 = 𝑈𝐶 𝑈𝐶 = 3𝐼𝐿 𝑈𝑜 = 𝐷𝑈𝑖𝑛
2.3. Mô hình tín hiệu nhỏ
Trong báo cáo này em sử dụng phương pháp tring bình hóa mạng đóng cắt để
tìm mô hình tín hiệu nhỏ của mạch buck converter. Phương pháp được trình bày
như sau.
Từ mô hình mạch điện tương đương thay thể phần tử đóng cắt lắp vào sơ đồ
mạch lực bộ biến đổi Buck, ta có mạch điện mô tả bộ biến đổi Buck với tín hiệu
nhỏ.
Hình 2.2. Mạch điện mô tả bộ biến đổi buck với tín hiệu nhỏ
Từ sơ đồ hình 2.2 ta có:
��2 = 𝐷��1 + 𝑈1��
Do đó hàm truyền từ hệ số điều chế đến điện áp đầu ra viết dưới miền ảnh
Laplace:
��2(𝑠)
��(𝑠)|��1(𝑠)=0
= 𝑈1
Mặt khác từ sơ đồ hình 2.2 ta cũng có:
��0(𝑠)
��2(𝑠)=
𝑍𝑅𝐶𝑍𝑅𝐶 + 𝑍𝐿
Trong đó:
𝑍𝑅𝐶 =𝑅(1+𝑠𝑟𝐶𝐶)
1+𝑠𝐶(𝑅+𝑟𝐶) là trở kháng song song giữa mạch tụ lọc 𝐶 và tải 𝑅.

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
𝑍𝐿 = 𝑠𝐿 là trở kháng mạch điện cảm L.
Như vậy hàm truyền giữa hệ số điều chế với đầu điện áp ra là:
��0(𝑠)
��(𝑠)|��1(𝑠)=0
=��0(𝑠)
��2(𝑠)∙��2(𝑠)
��(𝑠)=
𝑈1(1 + 𝑠𝑟𝐶𝐶)
1 + 𝑠 (𝐶𝑟𝐶 +𝐿𝑅)+ 𝑠2
𝐿𝐶(𝑅 + 𝑟𝐶)𝑅
Nếu xét hàm truyền từ đầu vào đến điện áp đầu ra thì
��2(𝑠)
��1(𝑠)|��(𝑠)=0
= 𝐷
Do đó:
��0(𝑠)
��1(𝑠)|��(𝑠)=0
=��0(𝑠)
��2(𝑠)∙��2(𝑠)
��1(𝑠)=
𝐷(1 + 𝑠𝑟𝐶𝐶)
1 + 𝑠 (𝐶𝑟𝐶 +𝐿𝑅)+ 𝑠2
𝐿𝐶(𝑅 + 𝑟𝐶)𝑅
2.4. Cấu trúc điều khiển
2.4.1. Điều khiển trực tiếp (điện áp)
Hình 2.3. Cấu trúc điều khiển trực tiếp bộ buck converter
Đối tượng điều khiển
Từ hàm truyền điện áp đầu ra và hệ số điều chế ta viết lại dưới dạng sau:
𝐺𝑣𝑑(𝑠) =��0(𝑠)
��(𝑠)=
𝑅𝑈𝑖𝑛(1 + 𝐶𝑟𝑐𝑠)
𝑅 + (𝐿 + 𝑅𝑟𝐶𝐶)𝑠 + 𝐿𝐶(𝑅 + 𝑟𝐶)𝑠2
↪ 𝐺𝑣𝑑(𝑠) =4.2 ∙ 10−3𝑠 + 84
7.75 ∙ 10−8𝑠2 + 2 ∙ 10−4𝑠 + 3
Vẽ đồ thị bode của hàm truyền đạt của đối tượng

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Sử dụng lệnh plot(Gvd.time,Gvd.signals.values), ta vẽ được đồ
thị bode của đối tượng:
Hình 2.4. Đồ thị bode của Gvd(s)
Từ đồ thị bode ta có được độ dữ trữ pha: PM=73.5
Bộ điều khiển bù PID
Chọn bộ điều khiển là một bộ bù PID có hàm truyền tổng quát là:
𝐺𝑐(𝑠) = 𝐺𝑐0
(1 +𝑠𝜔𝑧) (1 +
𝜔𝐿𝑠 )
(1 +𝑠𝜔𝑝)
Chọn:
⋄ 𝑓𝑐 =1
10𝑓𝑥 = 10 (𝑘𝐻𝑧)
⋄ 𝑓𝐿 =1
20𝑓𝑐 = 0.5 (𝑘𝐻𝑧)
⋄ 𝑃𝑀mong muốn = 55°
↪ 𝑃𝑀𝑃𝐼𝐷 = 55° − 73.5° = −18.5° = 𝜃

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
↪
{
𝑓𝑧 = 𝑓𝑐√
1 − sin 𝜃
1 + sin 𝜃= 10√
1 − sin(−18.5)
1 + sin(−18.5)= 13.89 (𝑘𝐻𝑧)
𝑓𝑝 = 𝑓𝑐√1 + sin 𝜃
1 − sin 𝜃= 10√
1 + sin(−18.5)
1 − sin(−18.5)= 7.20 (𝑘𝐻𝑧)
Chọn Gc0 sao cho: |𝐺𝑐(𝑗𝜔)|𝜔𝑐 ∙ |𝐺𝑣𝑑(𝑗𝜔)|𝜔𝑐 = 1
Mà:
|𝐺𝑐(𝑗𝜔)|𝜔𝑐 = 𝐺𝑐0√1 + (𝑓𝐿𝑓𝐶)2
√𝑓𝑝𝑓𝐶= 𝐺𝑐0√1 + (
0.5
20)2
√7.2
13.89= 0.72𝐺𝑐0
Sử dụng lệnh [mag,phase]=bode(Gvd,2*pi*10e3)
→ |𝐺𝑣𝑑(𝑗𝜔)|𝜔𝑐 = 0.9113
→ 𝐺𝑐0 =1
0.72 × 0.9113= 1.524
Vậy: 𝐺𝑐(𝑠) = 1.524(1 +
𝑠2𝜋13.98 ∙ 103
) (1 +2𝜋0.5 ∙ 103
𝑠 )
(1 +𝑠
2𝜋7.2 ∙ 103)
↪ 𝐺𝑐(𝑠) =1.73 ∙ 10−5𝑠2 + 1.04𝑠 + 4787.79
2.21 ∙ 10−5𝑠2 + 𝑠
Kết quả mô phỏng

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 2.5. Đáp ứng điện áp đầu ra với điện áp đặt (a),
biên độ dao động (b), dạng đáp ứng bước nhảy (c)
2.4.2. Điều khiển gián tiếp (dòng điện trung bình)

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 2.6. Cấu trúc điều khiển gián tiếp bộ buck converter
a) Vòng phản hồi trong – vòng dòng
Hình 2.7. Cấu trúc điều khiển vòng trong (dòng điện)
Đối tượng điều khiển
Từ hàm truyền dòng điện đầu ra và hệ số điều chế ta viết lại dưới dạng sau:
𝐺𝑑𝑖(𝑠) =𝑖��(𝑠)
��(𝑠)=
𝑈𝑖𝑛[(𝑅 + 𝑟𝐶)𝐶𝑠 + 1]
𝑅 + (𝐿 + 𝑅𝑟𝐶𝐶)𝑠 + 𝐿𝐶(𝑅 + 𝑟𝐶)𝑠2
↪ 𝐺𝑑𝑖(𝑠) =0.0434𝑠 + 28
7.75 ∙ 10−8𝑠2 + 2 ∙ 10−4𝑠 + 3
Vẽ đồ thị bode của hàm truyền đạt của đối tượng
Sử dụng lệnh plot(Gdi.time,Gdi.signals.values), ta vẽ được đồ
thị bode của đối tượng:
𝐺𝑐𝑖 (𝑠) 𝐺di(𝑠) 𝑖��∗ �� 𝑖��

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 2.8. Đồ thị bode của Gdi(s)
Từ đồ thị bode ta có được tần số cắt: 𝑓𝑐 = 5.6 ∙ 105 (𝐻𝑧)
Bộ điều khiển PI
Chọn bộ điều khiển là khâu PI có dạng
𝐺𝑐𝑖(𝑠) = 𝐺𝑐𝑖_0 (1 +𝜔𝐿𝑖𝑠)
Chọn: 𝑓𝐿𝑖 =1
100𝑓𝑐 = 5.6 (𝑘𝐻𝑧)
Chọn: 𝐺𝑐𝑖_0 sao cho: |𝐺𝑐𝑖(𝑗𝜔)|𝜔𝑐 ∙ |𝐺𝑑𝑖(𝑗𝜔)|𝜔𝑐 = 1
Mà:
|𝐺𝑐𝑖(𝑗𝜔)|𝜔𝑐 = 𝐺𝑐𝑖_0√1 + (𝜔𝐿𝑖𝜔𝑐)2
= 1.005𝐺𝑐0
Sử dụng lệnh [mag,phase]=bode(Gid,2*pi*5.6e5)
→ |𝐺𝑑𝑖(𝑗𝜔)|𝜔𝑐 = 0.1592
→ 𝐺𝑐𝑖_0 =1
1.005 × 0.1592= 6.25

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Vậy: 𝐺𝑐𝑖(𝑠) = 6.25(1 +2𝜋5.6 ∙ 103
𝑠)
↪ 𝐺𝑐𝑖(𝑠) = 6.25 +2.20 ∙ 105
𝑠
b) Vòng phản hồi ngoài – vòng áp
Đối tượng điều khiển
Từ hàm truyền điện áp đầu ra và dòng điện trên cuộn cảm ta viết lại dưới
dạng sau:
𝐺𝑢𝑖(𝑠) =u0(𝑠)
��𝐿(𝑠)=
𝑅(1 + 𝐶𝑟𝐶𝑠)
(𝑅 + 𝑟𝐶)𝐶𝑠 + 1
↪ 𝐺𝑢𝑖(𝑠) =0.3 ∙ 10−3𝑠 + 3
1.55 ∙ 10−3𝑠 + 1
Vẽ đồ thị bode của hàm truyền đạt của đối tượng
Sử dụng lệnh plot(Gui.time,Gui.signals.values), ta vẽ được đồ
thị bode của đối tượng:
𝐺𝑐𝑢 (𝑠) 𝐺ui(𝑠) ��𝑜
∗ 𝑖��
∗ ��𝑜

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 2.9. Đồ thị bode của Gui(s)
Từ đồ thị bode ta có được tần số cắt: 𝑓𝑐 = 1.86 (𝑘𝐻𝑧)
Bộ điều khiển PI
Chọn bộ điều khiển là khâu PI có dạng
𝐺𝑐𝑢(𝑠) = 𝐺𝑐𝑢_0 (1 +𝜔𝐿𝑢𝑠)
Chọn: 𝑓𝐿𝑢 =1
10𝑓𝑐 = 0.186 (𝑘𝐻𝑧)
Chọn: 𝐺𝑐𝑢_0 sao cho: |𝐺𝑐𝑢(𝑗𝜔)|𝜔𝑐 ∙ |𝐺𝑢𝑖(𝑗𝜔)|𝜔𝑐 = 1
Mà:
|𝐺𝑐𝑢(𝑗𝜔)|𝜔𝑐 = 𝐺𝑐𝑢_0√1 + (𝜔𝐿𝑢𝜔𝑐
)2
= 1.005𝐺𝑐0
Sử dụng lệnh [mag,phase]=bode(Gui,2*pi*1.86e3)
→ |𝐺𝑢𝑖(𝑗𝜔)|𝜔𝑐 = 0.2543
→ 𝐺𝑐𝑢_0 =1
1.005 × 0.2543= 3.91

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Vậy: 𝐺𝑐𝑢(𝑠) = 3.91 (1 +2𝜋0.186 ∙ 103
𝑠)
↪ 𝐺𝑐𝑢(𝑠) = 3.91 +4.57 ∙ 103
𝑠
Kết quả mô phỏng:

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
Hình 2.10. Kết quả mô phỏng điều khiển mạch buck theo
phương pháp gián tiếp – dòng điện trung bình

ĐIỀU KHIỂN ĐIỆN TỬ CÔNG SUẤT
TÀI LIỆU THAM KHẢO
[1] Phạm Quốc Hải, Hướng dẫn và thiết kế điện tử công suất, NXB Khoa học và
Kỹ thuật, Hà Nội, 2009.
[2] Trần Trọng Minh, Vũ Hoàng Phương, Thiết kế điều khiển cho các bộ biến đổi
điện tử công suất, BM.Tự Động Hóa – Viện Điện – ĐH BKHN, 2014.
[3] Trần Trọng Minh, Giáo trình điện tử công suất, NXB Giáo dục Việt Nam, Hà
Nội, 2011.
[4] Bùi Quốc Khách – Nguyễn Văn Liễn – Phạm Quốc Hải – Dương Văn Nghi,
Điều chỉnh tự động truyền động điện, NXB Khoa học và Kỹ thuật, Hà Nội,
2014.
[5] Doãn Hữu Phước, Lý thuyết điều khiển tuyến tính, NXB Khoa học và Kỹ thuật,
Hà Nội, 2009.
Top Related