







Languages
Pages
Legal


.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Elastičnost kristala« Fizika čvrstog stanja »
Ivo Batistić
Fizički odsjek, PMFSveučilište u Zagrebu
predavanja 2014/2015 (zadnja inačica 6. veljače 2015.)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Pregled predavanja
Tenzor deformacije i tenzor naprezanja
Termodinamika elastičnih deformacija
Hookeov zakon za izotropnu sredinu
Elastični valovi u izotropnoj sredini
Hookeov zakon za kristal
Stabilnost kubičnih kristala
Stlačivost tijela
Elastični valovi u kristalu
Temperaturna ovisnost elastičnih konstanti
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Tenzor deformacije i tenzornaprezanja

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Tenzor deformacije
Do sada smo promatrali kristal kao idealnu pravilnu rešetku u kojojioni/atomi zauzimaju točno određene položaje. U realnom kristaluatomi/ioni se mogu gibati, kristalna rešetka se može deformirati.
▶ Deformacije mogu nastati spontano (kao termodinamičkefluktuacije) ili kao rezultat primjene vanjskih sila.
▶ U ovom predavanju zanemaruje se atomska struktura.▶ Kristal se promatra kao homogena kontinuirana sredina.▶ Radi se o dugovalnoj aproksimacije koja vrijedi za elastičnevalove kojima je λ > 10−8 m (100 Å).
▶ Tipične frekvencije takvih valova su 1011 − 1012 Hz.▶ Pretpostavlja se da su deformacije dovoljno male da senelinearnosti, odstupanja od Hookeovog zakona, moguzanemariti.

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Tenzor deformacije
▶ U nedeformiranom sredstvu položaji točaka zadani su prekoradijus vektora: R⃗.
▶ U deformiranom mediju točka na položaju R⃗ prelazi u x⃗(R⃗):
R⃗ −→ x⃗(R⃗) = R⃗+ u⃗(R⃗)
▶ u⃗(R⃗) je pomak točke iz ravnotežnog položaja (položaja unedeformiranom kristalu).
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Tenzor deformacijePromatrajmo dvije beskonačno bliske točke medija zadane spoložajima:
R⃗ i R⃗+ dR⃗
U deformiranoj sredini one prelaze u:
x⃗(R⃗) i x⃗(R⃗+ dR⃗)
Čemu je jednaka udaljenost točaka u deformiranoj sredini?
dx⃗ = x⃗(R⃗+ dR⃗)− x⃗(R⃗)
=∑i
e⃗i(xi(R⃗+ dR⃗)− xi(R⃗)
)=
∑i
e⃗i(dRi + ui(R⃗+ dR⃗)− ui(R⃗)
)
=∑i
e⃗i
dRi +∑j
∂ui∂Rj
dRj

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Tenzor deformacije
Promjena udaljenosti bliskih točaka zbog deformacije:
dx⃗2 − dR⃗2 =∑i,j
2uij dRi dRj
gdje je:
uij =1
2
∂ui∂Rj
+∂uj∂Ri
+∂ui∂Rj
∂uj∂Ri︸ ︷︷ ︸
nelinearni član
Nelinearne članove ćemo zanemariti.Pretpostavljamo da su deformacije male.
Veličina uij zove se tenzor deformacije.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Lagrangeov i Eulerov koordinatni sustav
▶ Između položaja u nedeformiranom sustavu, R⃗, i položajadeformiranog sustava, x⃗, postoji jednoznačno preslikavanje.
x⃗(R⃗) ↔ R⃗(⃗x)
▶ Deformaciju u⃗(R⃗) možemo prikazivati preko koordinatadeformiranog sustava:
u⃗(R⃗) −→ u⃗(⃗x) = u⃗(R⃗(⃗x))
▶ Sustav prikazivanja deformacije• preko nedeformiranih koordinata nazivamo Lagrangeov,• dok sustav prikazivanja deformacije preko deformiranihkoordinata nazivamo Eulerov.
▶ U Eulerovom sustavu koordinata nedeformirane pozicije su:
R⃗ = x⃗− u⃗(⃗x)

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Jedinični vektori
Za položaje R⃗ i R⃗+ dR⃗ možemo izabrati početak i kraj jediničnogvektora i⃗:
dR⃗ = (1, 0, 0)
U deformiranom sustavu jedinični vektor postaje:
i⃗′ = x⃗(R⃗+ i⃗)− x⃗(R⃗)= i⃗+ u⃗(R⃗+ i⃗)− u⃗(R⃗)
= i⃗(1 +
∂ux∂Rx
)+ j⃗
∂uy∂Rx
+ j⃗∂uz∂Rx
Na isti način:
j⃗′ = i⃗∂ux∂Ry
+ j⃗(1 +
∂uy∂Ry
)+ k⃗
∂uz∂Ry
k⃗′ = i⃗∂ux∂Rz
+ j⃗∂uy∂Rz
+ k⃗(1 +
∂uz∂Rz
)

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Jedinični vektori
Promjena dužina vektora:
i⃗′ · i⃗′ − 1 = 2∂ux∂Rx
+
(∂ux∂Rx
)2
+
(∂uy∂Rx
)2
+
(∂uz∂Rx
)2
≈ 2∂ux∂Rx
= 2 uxx
j⃗′ · j⃗′ − 1 ≈ 2∂uy∂Ry
= 2 uyy
k⃗′ · k⃗′ − 1 ≈ 2∂uz∂Rz
= 2 uzz
Promjena kutova:
i⃗′ · j⃗′ ≈ ∂ux∂Ry
+∂uy∂Rx
= 2 uxy
j⃗′ · k⃗′ ≈ ∂uy∂Rz
+∂uz∂Ry
= 2 uyz
k⃗′ · i⃗′ ≈ ∂uz∂Ri
+∂ux∂Rz
= 2 uzx

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Promjena volumena
Dijagonalni elementi tenzora deformacije opisuju promjenu dužina je-diničnih vektoraa nedijagonalni elementi opisuju promjenu kutova između jediničnihvektora.
Volumen je zadan s mješovitim produktom vektora:
V′ = i⃗′ · (⃗j′ × k⃗′) ≈ 1 + uxx + uyy + uzz︸ ︷︷ ︸=δV/V
Relativna promjena volumena dana je tragom tenzora deformacije.

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Tenzor naprezanja
▶ Ako sredina nije deformirana molekule se nalaze u stanjutermalne ravnoteže. Svi dijelovi sredine su u mehaničkojravnoteži. Sile na pojedine dijelove sredine (podsustavi) sujednake nuli.
▶ Ako se pojavi deformacija, ravnoteža je poremećena. Tada sejavljaju restitucijske sile koje nastoje sustav vratiti u ravnotežu.
▶ Restitucijske sile su međuatomske/međumolekularne silekratkog dosega.
▶ Međudjelovanje pojedinih dijelova sustava događa se nadodirnim površinama.
▶ Izuzetak od ovoga su sustavi u kojima se deformacijom stvaradugodosežno električno polje (piro- i piezoelektrični materijali).To nisu tvari koje se ovdje razmatraju.
Ako sile jesu kratkog dosega, ukupnu sila koja djeluje na nekipodsustav zadana je silama na njegovoj površini.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Tenzor naprezanja
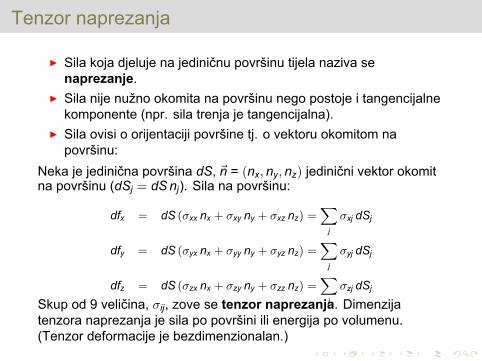
▶ Sila koja djeluje na jediničnu površinu tijela naziva senaprezanje.
▶ Sila nije nužno okomita na površinu nego postoje i tangencijalnekomponente (npr. sila trenja je tangencijalna).
▶ Sila ovisi o orijentaciji površine tj. o vektoru okomitom napovršinu:
Neka je jedinična površina dS, n⃗ = (nx, ny, nz) jedinični vektor okomitna površinu (dSj = dSnj). Sila na površinu:
dfx = dS (σxx nx + σxy ny + σxz nz) =∑j
σxj dSj
dfy = dS (σyx nx + σyy ny + σyz nz) =∑j
σyj dSj
dfz = dS (σzx nx + σzy ny + σzz nz) =∑j
σzj dSj
Skup od 9 veličina, σij, zove se tenzor naprezanja. Dimenzijatenzora naprezanja je sila po površini ili energija po volumenu.(Tenzor deformacije je bezdimenzionalan.)

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
SilaUkupna sila koju osjeća neki podsustav omeđen površinom S dana jes integralom:
F⃗ =∑i
e⃗i Fi =∑i
e⃗i
Fi︷ ︸︸ ︷∫S
∑j
(dSj σij) =∑i,j
e⃗i∫S
dSj σij
Sila koju osjeća kockica u točci (x, y, z) dimenzija ∆x,∆y i ∆z ux-smjeru je:
∆Fx = [σxx(x+ 0.5∆x, y, z)− σxx(x− 0.5∆x, y, z)] ∆y∆z+[σxy(x, y+ 0.5∆y, z)− σxy(x, y− 0.5∆y, z)] ∆x∆z+[σxz(x, y, z+ 0.5∆z)− σxz(x, y, z− 0.5∆z)] ∆x∆y
≈(∂σxx∂x
+∂σxy∂y
+∂σxz∂z
)∆x∆y∆z
Gustoća sile (sila po jedinici volumena) je dana gradijentom tenzoranaprezanja:
f⃗ =∑i,j
e⃗i∂σij∂Rj

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Zakretna sila
Ukupna sila može se izračunati i preko volumnog integrala gustoćesile:
F⃗ =
∫V
d3R
∑i,j
e⃗i∂σij∂Rj
Ukupna zakretna sila na neki podsustav dana je analognim izrazom:
M⃗ =
∫V
d3R∑i
e⃗i ϵijkRjfk
gdje je ϵijk antisimetrični tenzor (Levi-Civita):
ϵxyz = ϵyzx = ϵzxy = +1
ϵxzy = ϵzyx = ϵyxz = −1
sve ostalo = 0 (bilo koja dva ista indeksa)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Zakretna sila
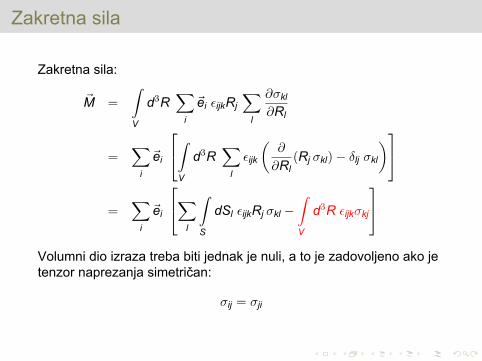
Zakretna sila:
M⃗ =
∫V
d3R∑i
e⃗i ϵijkRj∑l
∂σkl∂Rl
=∑i
e⃗i
∫V
d3R∑l
ϵijk
(∂
∂Rl(Rj σkl)− δlj σkl
)=
∑i
e⃗i
∑l
∫S
dSl ϵijkRj σkl −∫V
d3R ϵijkσkj
Volumni dio izraza treba biti jednak je nuli, a to je zadovoljeno ako jetenzor naprezanja simetričan:
σij = σji

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hidrostatska kompresija
σ =
−p 0 00 −p 00 0 −p
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
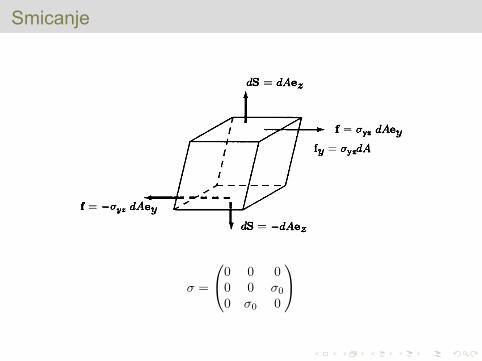
Smicanje
σ =
0 0 00 0 σ0
0 σ0 0

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Termodinamika elastičnihdeformacija
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
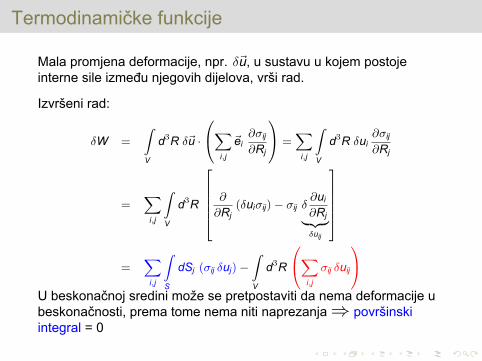
Termodinamičke funkcije
Mala promjena deformacije, npr. δu⃗, u sustavu u kojem postojeinterne sile između njegovih dijelova, vrši rad.
Izvršeni rad:
δW =
∫V
d3R δu⃗ ·
∑i,j
e⃗i∂σij∂Rj
=∑i,j
∫V
d3R δui∂σij∂Rj
=∑i,j
∫V
d3R
∂
∂Rj(δuiσij)− σij δ
∂ui∂Rj︸ ︷︷ ︸δuij
=
∑i,j
∫S
dSj (σij δuj)−∫V
d3R
∑i,j
σij δuij
U beskonačnoj sredini može se pretpostaviti da nema deformacije ubeskonačnosti, prema tome nema niti naprezanja⇒ površinskiintegral = 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Termodinamičke funkcije
Rad sustava zbog promjene deformacije po jedinici volumena je:
δw = −∑i,j
σij δuij
▶ Proces deformiranja događa se dovoljno sporo da se možesmatrati da je sustav svakom trenutku u ravnotežnom stanju kojeodgovara vanjskim uvjetima.
▶ Proces deformiranja je reverzibilan.(Reverzibilni procesi su oni u kojima se sustav cijelo vrijeme uravnotežnom stanju.)

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Termodinamičke funkcije
Dovedena toplina (dq = Tds) i izvršeni rad dw dovode do promjenagustoće unutrašnje energije (e):
de = Tds− dw = Tds+∑i,j
σij duij
Ako su sile hidrostatske kao što su one u plinovima i tekućinama,tada je:
σij = −p δij(Postoji samo okomita komponenta sile na površinu). Promjenaunutrašnje energije je:
de = Tds+∑i,j
σij duij = Tds− p∑i
duii
= Tds− p dVV
To je izraz već otprije poznat iz termodinamike.

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Termodinamičke funkcijeAnalogno, slobodna energija sustava po jedinici volumena je:
df = −s dT+∑i,j
σij duij
Moguće je definirati termodinamički potencijal koji je funkcijanaprezanja:
ϕ(T, σij) = e− Ts−∑i,j
σij uij = f−∑i,j
σij uij
Vrijedi:dϕ = −s dT−
∑i,j
uij dσij
Iz termodinamičkih potencijala može se izračunati i deformacija inaprezanje u ravnotežnom stanju:
σij =
(∂e∂uij
)s=
(∂f∂uij
)T
uij = −(
∂ϕ
∂σij
)T

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon zaizotropnu sredinu

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon
Da bi se mogla razmatrati termodinamička svojstva sustava potrebnoje znati kako slobodna energija ovisi o deformaciji.
Pretpostavke:▶ Deformacija je dovoljno mala da se slobodna energija možerazviti u Taylorov red po uij.
▶ Temperatura medija je svuda ista.▶ Temperature deformiranog i nedeformiranog medija su iste.▶ U odsustvu deformacije (uij) naprezanje σij =0
⇒ slobodna energija ne sadrži linearne članove u deformaciji.

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon
Opći mogući član u razvoju slobodne energije po deformaciji sadržičlanove tipa:
aijkl uij uklTakav opći član nema svojstvo skalara da je isti u svakomkoordinatnom sustavu.
Slobodna energija koja je skalar ne sadrži takav opći član.
Slobodna energija sadrži samo skalarne kvadratne kombinacijekomponenti uij-tenzora koje su iste u svakom koordinatnom sustavu.
Različiti koordinatni sustavi se dobiju jedan iz drugog:▶ rotacijama za proizvoljni kut ako je sustav izotropna sredina.▶ točkastim grupnim transformacijama ako se radi o kristalu.

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Dekompozicija matrice/tenzora u ireducibilne dijeloveMnoge fizikalne veličine opisane su vektorima, a oni se običnoprikazuju kao skup od 3 broja koja predstavljaju projekcije vektora nakoordinatne osi:
r⃗ = x i⃗ + y j⃗ + z k⃗
gdje su koordinate:
x = r⃗ · i⃗, y = r⃗ · j⃗, z = r⃗ · k⃗.
Koordinate ovise o izboru koordinatnog sustava. Izborom drugogkoordinatnog sustava, zarotiranog u odnosu na prvi, vektor će imatidrugi skup koordinata koje ga predstavljaju. Nove koordinate običnosu dane kao linearna kombinacija starih:
x′ = R11 x + R12 y + R13 zy′ = R21 x + R22 y + R23 zz′ = R31 x + R32 y + R33 z

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Dekompozicija matrice/tenzora u ireducibilne dijelove
▶ Tako i matrica/tenzor mijenja svoje komponente u novomzarotiranom koordinatnom sustavu. Pri tome su novekomponente matrice, njih 9, dane kao linearna kombinacija starih9 komponenata. Dakle matrica transformacije je 9×9.
▶ Transformacija matrice se može značajno pojednostavitiuočavanjem neke pravilnosti:
• dijagonalna matrica je u svakom koordinatnom sustavu ista. (tragmatrice - jedan nezavisni broj)
• simetrična matrica čiji trag je jednak nuli, pri transformaciji ponovoostaje simetrična s tragom jednakim nuli. (5-dimenzionalni vektor)
• antisimetrična matrica pri transformaciji ponovo ostajeantisimetrična. (3-dimenzionalni vektor)
Pojedini dijelovi matrice se transformiraju nezavisno jedni od drugih.Svaka 3×3 matrica može se rastaviti u dijelove koji se transformirajumeđusobno nezavisno (9 = 5 + 3 + 1).
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon za izotropnu sredinu
Za izotropnu sredinu postoje samo dvije skalarne kombinacije:▶ Trag odnosno kvadrat traga tenzora uij:
(∑i
uii)2
▶ Dužina 5-dimenzionalnog vektora (simetričnog dijela tenzora).∑i,j
u2ij
Izraz smo pojednostavili tako što smo zadržali trag.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon za izotropnu sredinuIzmeđu izraza s tragom i izraza s bez traga postoji veza:
∑i,j
u2ij =∑i,j
trag je nula︷ ︸︸ ︷
uij −1
3δij(∑k
ukk)+1
3δij(∑k
ukk)
2
=∑i,j
(uij −
1
3δij(∑k
ukk)
)2
+1
9(∑i
uii)2=3︷ ︸︸ ︷∑i,j
δ2ij
+2
3(∑k
ukk)∑i,j
δij
(uij −
1
3δij(∑k
ukk)
)
=∑i,j
(uij −
1
3δij(∑k
ukk)
)2
+1
3(∑i
uii)2
+2
3(∑k
ukk)
∑i,j
uij δij −1
3(∑k
ukk)∑i,j
δ2ij
︸ ︷︷ ︸
=0

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon za izotropnu sredinu
Stoga razvoj slobodne energije po deformaciji je:
f = f0 +1
2λ (∑i
uii)2 + µ∑i,j
u2ij
Parametri u razvoju, λ i µ, su poznati kao Laméovi koeficijenti.
Napiše li se slobodna energija preko deformacije bez traga:
f = f0 +1
2K (∑i
uii)2 + µ∑i,j
(uij −
1
3δij(∑k
ukk)
)2
gdje je:K = λ+
2
3µ
K je modul stlačivosti (hidrostatska kompresibilnost) a µ je modulsmicanja (eng. shear modulus ili modulus of rigidity)

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Naprezanje u izotropnoj sredini
U stanju termodinamičke ravnoteže slobodna energija ima minimum.f kao funkcija komponenti uij treba imati minimum za uij = 0. ⇒koeficijenti u razvoju slobodne energije trebaju biti pozitivni:
K > 0 i µ > 0
Iz slobodne energije se može izračunati naprezanje za danudeformaciju:
σij =
(∂f∂uij
)T
= K(∑k
ukk) δij + 2µ
(uij −
1
3δij(∑k
ukk)
)

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Deformacija za dani tenzor naprezanja
Trag tenzora naprezanja:∑i
σii = 3K (∑i
uii)
odnosno:(∑i
uii) =1
3K(∑i
σii)
Iz izraza za tenzor naprezanja slijedi:
uij =1
9K(∑i
σii) δij +1
2µ
(σij −
1
3δij(∑k
σkk)
)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Deformacija za dani tenzor naprezanja
U slučaju hidrostatskog tlaka (σij = −p δij):
(∑i
uii) = − pK
Budući da je:(∑i
uii) =δVV
slijedi:1
K= − 1
V
(∂V∂p
)T
Inverzna vrijednost modula stlačivosti naziva se stlačivost ilikompresibilnost.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Elastični valovi u izotropnojsredini

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Jednadžbe gibanja
Izraz za gustoću sile:f⃗ =
∑i,j
e⃗i∂σij∂Rj
može se iskoristiti u jednadžbama gibanja:
ρ∂2u⃗∂t2
= f⃗
pa se dobiva:
ρ∂2ui∂t2
=
λ+µ︷ ︸︸ ︷(K+
µ
3
) ∑j
∂2uj∂Ri∂Rj
+ µ∑j
∂2ui∂R2
j
U vektorskoj notaciji:
ρ ¨⃗u = (λ+ µ) ∇⃗(∇⃗ · u⃗
)+ µ∆u⃗
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Valovi u izotropnoj srediniTraži se rješenje gornje jednadžbe u obliku ravnih valova:
u⃗ = e⃗ eı(⃗k⃗r−ωt)
gdje je e⃗ vektor polarizacije vala. Uvrštavanjem se dobiva:
ρω2 e⃗ = (λ+ µ) k⃗(k⃗ · e⃗
)+ µ k2 e⃗
Vektor polarizacije se može razložiti na longitudinalno i transverzalnotitranje:
e⃗L = k⃗(k⃗ · e⃗
)/k2
e⃗T = e⃗− e⃗L (ne postoji u plinovima i tekućinama)
s frekvencijama titranja:
ωL =
√λ+ 2µ
ρ· |⃗k| ωT =
õ
ρ· |⃗k|

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Brzine zvučnih valova u dugovalnoj granici
Tvar cL (m/s) cT (m/s)Be 12720 8330Mg 5700 3170Al 6360 3130Ti 6260 2920V 6000 2780Cr 6850 3980Fe 5920 3220Ni 5810 3080Cu 4760 2300Ag 3640 1690Au 3280 1190Pb 2050 710
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon za kristal

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon za kristal
▶ Za kristalnu sredinu skup rotacijskih (i drugih) transformacija jereduciran u odnosu na izotropnu sredinu.
▶ Stoga postoji veći broj skalarnih kombinacija koje ostajuinvarijantne na simetrijske operacije.
Slobodna energija je općenito:
f = f0 +1
2
∑ijkl
Cijkl uij ukl
Tenzor elastičnih modula, Cijkl, ima ova simetrijska svojstva:
Cijkl = Cjikl
Cijkl = Cijlk
Cijkl = Cklij

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hookeov zakon za kristalBroj različitih mogućih komponenti tenzora elastičnih modula:
6 +30
2= 21
U kristalima koji imaju veći broj simetrijskih operacija taj je brojznačajno manji:
Rešetka kubična heksagonska tetragonska ortorombska …broj el. konstanti 3 5 6 9 …
Za kombinacije indeksa uobičajeno je koristiti slijedeću notaciju:
xx → 1
yy → 2
zz → 3
yz → 4
zx → 5
xy → 6

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Kubični kristal
Slobodna energija za kubični kristal:
f(T,uij) = f0(T) +C11
2(u2xx + u2yy + u2zz) +
C44
2(u2xy + u2yz + u2zx)
+C12 (uyyuzz + uzzuxx + uxxuyy)
Simetrijske operacije:
π2 rotacija oko z-osi : x → y, y → −xπ2 rotacija oko y-osi : x → z, z → −xπ2 rotacija oko x-osi : y → z, z → −y
2π3 rotacija oko dijagonale : x → y → z → x
. . .
Sve tri kombinacije tenzora deformacije su invarijantne na navedenesimetrijske operacije.

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Elastični moduli kubičnih kristala
Tvar C11 (GPa) C12 (GPa) C44 (GPa)Al 108 62 28.Na 7.59 6.33 4.3K 3.69 3.18 1.9
Rb 2.96 2.44 1.6Cr 348 67 100Fe 230 135 11Ni 247 153 12Cu 169 122 75.Ag 122 92 45.Au 191 162 42.Pb 48.8 41.4 14.C 1079 124.5 57Si 165.6 63.9 79.Ge 129 48.3 67.
NaCl 49.47 12.88 12.8KCl 40.69 7.11 6.3
NaBr 39.7 10.01 9.9GaAs 118.8 53.7 59.TiC 500 113 17

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Stabilnost kubičnih kristala

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Stabilnost kubičnih kristalaSlobodna energija se može zapisati:f = f0 +
(uxx uyy uzz uyz uzx uxy
)C11 C12 C12 0 0 0C12 C11 C12 0 0 0C12 C12 C11 0 0 00 0 0 C44 0 00 0 0 0 C44 00 0 0 0 0 C44
uxxuyyuzzuyzuzxuxy
Stabilnost rešetke zahtijeva da je kvadratična kombinacija pozitivnaza proizvoljnu deformaciju rešetke. To će biti zadovoljeno ako su svevlastite vrijednosti matrice pozitivne.
Vlastiti vektori i pripadne vlastite vrijednosti su:
C11 + 2C121√3(uxx + uyy + uzz) hidrostatska kompresija
C11 − C121√6(uxx + uyy − 2 uzz) tetragonska deformacija
C11 − C121√2(uxx − uyy) ortorombska deformacija
C44 uyz, uzx, uxy smicanje

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Homogene deformacije kubičnog kristala

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Stlačivost tijela

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Izotermalna i adijabatska (izoentropska) stlačivostTlak je:
p(V,T) = −(∂F∂V
)T= −
(∂E∂V
)S
▶ izotermalna stlačivostAko su promjene tlaka toliko spore da sustav cijelo vrijeme imaistu temperaturu kao okolina, tada je:
κT = − 1
V
(∂V∂p
)T=
1
V(∂2F∂V2
)T
▶ adijabatska stlačivostAko su promjene tlaka toliko brze da sustav ne stigne razmijenititoplinu s okolicom, tada je:
κS = − 1
V
(∂V∂p
)S=
1
V(∂2E∂V2
)S

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Izotermalna i adijabatska (izoentropska) stlačivostIzmeđu adijabatske i izotermalne stlačivost postoji veza.
dV =
(∂V∂p
)Tdp+
(∂V∂T
)pdT
⇒(∂V∂p
)S
=
(∂V∂p
)T+
(∂V∂T
)p
(∂T∂p
)S
Budući da vrijedi:
dS =
(∂S∂T
)pdT+
(∂S∂p
)Tdp
slijedi da je:
(∂T∂p
)S= −
(∂S∂p
)T(
∂S∂T
)p
=
(∂V∂T
)p
Cp
T
=TCp
(∂V∂T
)p

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Izotermalna i adijabatska (izoentropska) stlačivost
Gdje smo iskoristili Maxwellove relaciju:(∂V∂T
)p= −
(∂S∂p
)T=
∂2G∂p∂T
Definiramo koeficijent rastezanja pri konstantnom tlaku:
α = − 1
V
(∂V∂T
)p
Tada je:
κS = κT −α2TCp/V
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Deformacija zbog promjene temperature
▶ Pretpostavlja se da je na temperaturi T0 tijelo nedeformirano.▶ Ako se promjeni temperatura, zbog termalnog rastezanja pojavitće se deformacija čak i kada su vanjske sile jednake nuli.
▶ U razvoju slobodne energije po deformaciji pojavit će se linearničlan u deformaciji čiji je koeficijent u razvoju proporcionalanpromjeni temperature.
f(T, uij) = f0(T)− (∑i,j
αijuij) · (T− T0) +1
2
∑ijkl
Cijkl uij ukl
gdje je αij simetrični tenzor.Za izotropnu sredinu, nije teško provjeriti da je:
αij = α K δij
gdje je α koeficijent rastezanja, a K modul stlačivosti.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Elastični valovi u kristalu
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Elastični valovi u kubnom kristalu
Jednadžbe gibanja:
ρ∂2ui∂t2
= fi =∑j
∂σij∂Rj
=∑j
∂
∂Rj
(∂f∂uij
)
Za kubni kristal:
ρ∂2ux∂t2
= C11∂2ux∂R2
x+ C44
(∂2ux∂R2
y+
∂2ux∂R2
z
)+ (C12 + C44)
(∂2uy
∂Rx∂Ry+
∂2uz∂Rx∂Rz
)ρ∂2uy∂t2
= C11∂2uy∂R2
y+ C44
(∂2uy∂R2
x+
∂2uy∂R2
z
)+ (C12 + C44)
(∂2ux
∂Rx∂Ry+
∂2uz∂Ry∂Rz
)ρ∂2uz∂t2
= C11∂2uz∂R2
z+ C44
(∂2uz∂R2
x+
∂2uz∂R2
y
)+ (C12 + C44)
(∂2ux
∂Rx∂Rz+
∂2uy∂Ry∂Rz
)Rješenje se može tražiti u obliku ravnih valova:
u⃗ = e⃗ eı(⃗k⃗r−ωt)

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Elastični valovi u kubnom kristalu
▶ Za svaki valni broj k⃗ postoje tri rješenja.
▶ Općenito rješenja nisu čista longitudinalna ili transverzalnatitranja.
▶ Čisto longitudinalno/transverzalno titranje se pojavljuje tek zaposebne smjerove širenja.
Npr. za valove s valnim brojem u smjeru [100], brzina širenja je:
cL =
√C11
ρ
cT =
√C44
ρ

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Temperaturna ovisnostelastičnih konstanti
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
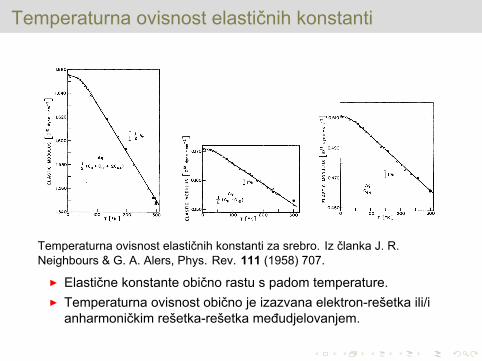
Temperaturna ovisnost elastičnih konstanti
Temperaturna ovisnost elastičnih konstanti za srebro. Iz članka J. R.Neighbours & G. A. Alers, Phys. Rev. 111 (1958) 707.
▶ Elastične konstante obično rastu s padom temperature.▶ Temperaturna ovisnost obično je izazvana elektron-rešetka ili/ianharmoničkim rešetka-rešetka međudjelovanjem.

.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Temperaturna ovisnost elastičnih konstanti
▶ Postoje sustavi u kojima elastična konstanta opada stemperaturom.
▶ To je obično posljedica strukturnog faznog prijelaza (2. vrste) nanižim temperaturama.
▶ Na strukturnom faznom prijelazu visokotemperaturna fazapostaje nestabilna (uvjeti stabilnosti nisu zadovoljeni),
▶ Na temperaturama ispod faznog prijelaza dolazi dorekonstrukcije rešetke na kojima su uvjeti stabilnosti rešetke opetzadovoljeni.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
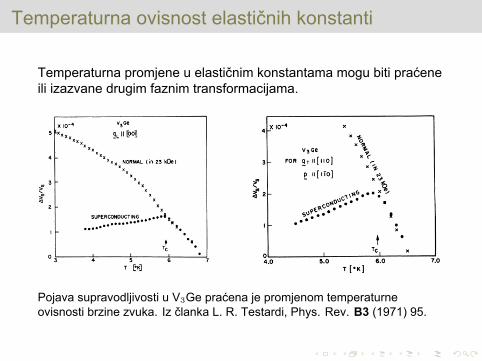
Temperaturna ovisnost elastičnih konstanti
Temperaturna promjene u elastičnim konstantama mogu biti praćeneili izazvane drugim faznim transformacijama.
Pojava supravodljivosti u V3Ge praćena je promjenom temperaturneovisnosti brzine zvuka. Iz članka L. R. Testardi, Phys. Rev. B3 (1971) 95.
Top Related