





Languages
Pages
Legal

1
DYNAMICS OF ROTATING MACHINES
Michael I Friswell, John E T Penny, Seamus D Garvey and Arthur W Lees
SOLUTION MANUAL
Version 1. July 2011
The authors welcome any comments and corrections.
Supporting MATLAB scripts and functions have been written with emphasis on clarity, not necessarily on efficiency or compactness.
2
Chapter 2
Problem 2.1 From Equation (2.24), the response is given by ( ) ( )0 0cos sinnt d dx t e a t b t= + . Thus ( ) ( )0 0 0 0cos sin sin cosn nt tn d d d d dx e a t b t e a t b t = + + + . When 0t = , ( ) 0 00x x a= = and ( ) 0 0 00 n dx x a b= = + . Hence ( )0 0 0n db x x= + . Now 1kgm = , 9 N mk = , 30 10 mx
= , 0 0x = .
Thus 0 = and 0 0b = , 9 3rad s = = = =n d k m . So ( ) ( )310 cos3 m=x t t . If 1Ns mc = , 2 1n c m = = . Then ( ) ( )2 1 2 3 0.1666nc m = = = and
2 21 3 1 0.1666 2.958rad s = = =d n . ( )0 0 00.1666 3 2.958 0.169= =b x x . Hence ( ) ( ) ( ){ }310 cos 2.958 0.169sin 2.958 mx t t t= + Problem 2.2 For the shaft, 4 10 40.01m, 0.40m, 32 9.818 10 md L J d = = = = .
9 1080 10 9.818 10 0.15 523.60N mshk GJ L= = = .
For the disk, 4 232 0.1960kg mI hD= = . Thus 523.60 0.1960 51.68rad = = =shk I s . ( ) ( )2 51.68 2 8.23Hz = = .
Problem 2.3
2 k m = . Thus ( )21 2 700 27635 N m 27.635kN mk = = = . Problem 2.4
50 2 314.159 rad s = = . 30 1mm 10 mx= = .
30 0 314.159 10 0.3142m sv x
= = = , 2 2 3 20 0 314.159 10 98.7 m sa x= = = .
Problem 2.5 Critical damping 1 = . Now 2 n c m = so that
( )2 2 1 2 700 8796.5 Ns mc nc m= = = . Problem 2.6 ( ) ( )0 cosnt dx t e c t= and ( ) ( ) ( )( )0 cosn t T dx t T e c t T ++ = + . Now
( )( ) ( )cos cosd dt T t + = so that ( )( )( )n
n
n
t TT
tx t T e ex t e
+
+= = .
Hence ( )( )
nTx t ex t T
=+
. Thus ( )( ) 2
2 2log1
e n nd
x tT
x t T
= = = = + .
3
Problem 2.7 Let ( ) cos sins s sx t A t B t= + . Substitute into equation (2.29) we have
( ) ( )( ) ( )
2
20
cos sin 2 sin cos
cos sin coss s s s
n s s
A t B t A t B t
A t B t f m t
+ + +
+ + =
Collecting together terms in cos t and sin t and letting 0 1f = gives
( ){ } ( )( ){ }
2 2
2 2
2 cos 1 cos
2 sin 0
n s n s
n s n s
A B t m t
B A t
+ =
=
Dividing by 2n and noting that generally, cos 0t and sin 0t we have
( ) ( )( )
2 2
2
1 2 1
1 2 0
s s n
s s
r A rB m
r B rA
+ =
=
Solving this pair of equations gives expressions for sA and sB identical to Equation (2.33). Problem 2.8 In Equation (2.35) let 2r = .
Then, ( )
( ) ( )( ) ( )
21 22 2
22 2
1 1 1 21 2
ns
n
mC
m
= = + +
.
Differentiating this expression gives ( ) ( ) ( ) ( )( ) ( )
3 22 2 22
1 1 2 2 1 1 22
s
n
d Cd m
= + +
.
Setting this expression to zero to determine the value of for the maximum response,
we have ( )( ) ( ) ( )2 22 1 1 2 2 1 4 0 + = + = . Thus at maximum response
(resonance) 21 2 = and hence 21 2r = . Thus the resonant frequency r is
given by 21 2 = r n . Note that r is not equal to d . Problem 2.9 5Hz 10 s. 10 11 1.1nr= = = = .
(a) From Equation (2.34) it is clear that the response is proportional to the input force. Doubling input force doubles response. No change in phase.
(b) If the phase of the input force changes, the phase of the response changes by the same amount. Magnitude of response unchanged.
(c) If the forcing frequency is halved, r is halved. Using Equation (2.35) with 0 = ,
4
then ( )( )
( )( )2 2
1.1 22
1 1
0.211 1.1
n ns r
m mC =
= =
, ( )
( )( )
( )2 20.55 22
1 1
0.69751 0.55
n ns r
m mC =
= =
.
Thus ( )( )
0.55
1.1
0.21 0.30110.6975
s r
s r
CC
=
=
= = - a reduction to 30% of the original response.
Because the forcing frequency is now below the natural frequency, the phase changes by 180 to zero.
(d) Initially, ( )( )
( )( )2 2
0 22
1 1
0.211 1.1
n ns
m mC =
= =
.
With damping, ( )( )
( ) ( )( )2 2
0.1 2 22
1 1
0.30411 1.1 2 0.1 1.1
n ns
m mC =
= =
+ ,
Thus ( )( )
0.1
0.0
0.21 0.69050.3041
s
s
C
C=
=
= = - a reduction to 69% of the original response.
( ) 1 10.1 2 22 2 0.1 1.1tan tan 46
1 1 1.1srr
=
= = = . i.e. 46 180 134 + = .
Problem 2.10 In this case ( )f t t T= . Thus from Equation (2.43) 0 0b = and
( )2
00 0 0
1 1 1 12 2
TT T t ta f t dt dtT T T T T
= = = =
From Equation (4.42) ( ) ( )00 0
2 2 2sin sinT T
nntb f t nt dt f t dt
T T T = =
.
Let 2 nt T x = so that ( )2dt T n dx= . When 0, 0t x= = and when , 2t T x n= = .
Hence ( ) ( )
( )2
202 2
0
2 2sin sin cos 12 2
nn
nb x x dx x x x nn n
= = =
.
Similarly, ( ) ( )
2202 2
0
2 2cos cos sin 02 2
nn
na x x dx x x xn n
= = + =
.
Thus the Fourier series for the function is 1
1 1 2sin2 n
t ntT n T
=
= .
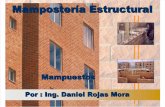
In this example, 2T = . The MATLAB script, Problem_02_10.m, uses this series to determine the Fourier approximation of the function using 10, 50 and 100 terms in the series and provides the following graphical output.
5
-2 0 2 4
0
0.5
1
10 term Fourier series
Time (s)
Forc
e (N
)
-2 0 2 4
0
0.5
1
50 term Fourier series
Time (s)
Forc
e (N
)
-2 0 2 4
0
0.5
1
100 term Fourier series
Time (s)
Forc
e (N
)
Problem 2.11
For this system 1 0
kg0 2
=
M and 5 4
N m4 5
=
K . The equations of motion are
+ =Mq Kq 0 . Solving these equations for free vibrations leads to an eigenvalue problem of the form = Ku Mu where n = . This equation can be solved by
finding roots of the quadratic 22 15 9 0 + = . Alternatively the eigenvalue problem can be solved directly, see the MATLAB script Problem_02_11.m. Running this script gives the following output: 1st mode u2/u1 = 1.0856 2nd mode u2/u1 = -0.46058 1st natural frequency = 0.81097 rad/s 2nd natural frequency = 2.6158 rad/s 1st natural frequency = 0.12907 Hz 2nd natural frequency = 0.41632 Hz Problem 2.12 The radial force due to each out of balance mass is 2u uf m r= , Thus when the masses have rotated from the vertical by an angle , then in the vertical direction the sum of the forces is 2 2 2cos cos 2 cosvert u u uf m r m r m r t= + = , since
t = . (Refer to Figure 2.36). In the horizontal direction the sum of the forces is 2 2sin sin 0hz u uf m r m r= = . Thus there is no horizontal force and, so, in the
x direction the equation of motion becomes 22 cosumx kx m r t+ = .
6
If a vibration absorber is added, and the displacement of this mass is ax then the equation of motion for free vibrations are
0 00 0
a aa a a
a a
k km x xk k km x x
+ = +
.
Thus, assuming a harmonic solution, we have 2
2
00
a a a a
a a
k m k xxk k k m
=
+ . Thus ( )( )2 2 2 0a a a ak m k k m k + = .
Multiplying out, and dividing by am m gives 4 2 0a a a
a a
k k k k km m m m
+ + + =
.
The forced vibration equations are 2
2
0cosa a a a
verta a
k m k xt
fxk k k m
=
+
Inverting the 2 2 coefficient matrix, we have
( )2
22
01 1cos cos + = =
a verta aa
vert a a verta a a
k fk k m kxt t
f k m fx D Dk k m.
where D is the determinant of coefficient matrix. The response x is zero if 2a ak m= . The response of the absorber is ( ) cosa vertk D f t where
( )( )2 2 2a a a aD k m k k m k= + . When 2a ak m= , 2aD k= . Thus ( )
221 cos cos = = ua a verta
m rx k f t tk
Problem 2.13 The equation of motion are Mq + Kq = 0 and assuming a harmonic solution,
= Ku Mu where n = . The system mass and stiffness matrices are 10 0 00 10 0 kg0 0 40
=
M , 2 3 3 2
3 3 4 4
2 4 1 2 4
20 10 10kN10 20 10m
10 10 40
k k k kk k k kk k k k k
+ = + = + +
K
2 3
1.1861 11.1861 , 1
1.0000 0
= =
u u . The products T2 3u M u and T2 3u K u are both zero.
Now, the triple product T3 3 20=u M u .
Thus { } { }T T3 3 20 1 1 0 4.47214= 0.22361 0.22361 0N = = u u .
7
Problem 2.14
(a) ( ) ( )3
1cosNi i i i
pt c t
== + q u and since the masses are initially at rest,
1 2 3 0 = = = . When 0t = , 3
01
Ni i Np
c=
= =q u U C , where C is a column vector of
the coefficients ic . Thus 1
0N=C U q .
Now 0.17132 0.14369 0.22361
10.17132 0.14369 0.22361kg0.10161 0.12114 0
N
=
U
and 11.71324 1.71324 4.064321.43703 1.43703 4.84584 kg
2.23603 2.23603 0N
=
U . Given 30
15 10 1 m
1
=
q , then
10
0.037450.00986 kg m
0N
= =
C U q . Since ( ) ( )3
1cosNi i i
pt c t
== q u then
( ) ( ) ( )1 20.17132 0.143690.17132 0.03745cos 0.14369 0.00986cos0.101611 0.12114
t t t
= +
q . Hence
( ) ( ) ( )1 20.006417 0.0014170.006417 cos m 0.001417 cos m0.003806 0.001194
t t t
= +
q ,
or ( ) ( ) ( )1 26.42 1.426.42 cos mm 1.42 cos mm3.81 1.19
t t t
= +
q .
(b) We have ( )t+ =Mq Kq Q . Letting N=q U p and pre-multiplying by TNU we have ( )T T TN N N N N t+ =U M U p U K U p U Q or ( )t+ =pp P . This set of uncoupled equations can then be solved individually for ip .
( ) ( ) ( ) ( )T0.17132 0.17132 0.10161 0 10.160.14369 0.14369 0.12114 0 cos 12.11 cos0.22361 0.22361 0 100 0
Nt t t t
= = =
P U Q
2 2 2 21 20.1725 406.9297 rad s = = ,
2 2 2 22 42.9310 1843.0707 rad s = = ,
2 2 2 23 54.7723 3000.0048rad s = = so that
8
2 2406.9297 0 0
0 1843.0707 0 rad s0 0 3000.0048
=
. Hence the uncoupled equations of
motion are ( )1 1406.9297 10.16cosp p t+ = , ( )2 21843.0707 12.11cosp p t+ = and 3 33000.0048 0p p+ = . Note 6Hz 6 2 37.699 rad s = = = . Solving these three
second order differential equations gives the following steady state solutions: 1 0.0100p = , 2 0.0287p = and 3 0p = . Thus
( ) ( ) ( )
( )
0.17132 0.14369 0.22361 0.0100.17132 0.14369 0.22361 0.0287 cos m0.10161 0.12114 0 0
0.005840.00584 cos m
0.00246
= =
=
Nt t t
t
q U p
1 1 3 30000 0.00246 73.8NkF k q= = = ( ) ( )2 2 1 3 10000 0.00584 0.00246 83NkF k q q= = = . ( ) ( )3 3 2 1 10000 0.00584 0.00584 0kF k q q= = + = . ( ) ( )4 4 3 2 10000 0.00246 0.00584 83NkF k q q= = + = .
(c) Response at coordinate 1 due to a harmonic force of 100 N at coordinate 3 is
0.00584m . Therefore the response at coordinate 1 due to a harmonic force of 1 N is 55.84 10 m . Thus the receptance 513 5.84 10 m N
= .
Mobility ( )5 313 13 37.6991 5.84 10 2.2016 10 m NsY j j j = = = . Inertance, ( )2 2 5 2 213 13 37.6991 5.84 10 8.3039 10 m Ns = = = A The MATLAB script Program_02_14.m repeats these calculations and gives the following output: q_1(t) = {6.4167*cos(omega1*t)}+ {-1.4167*cos(omega2*t)} (mm) q_2(t) = {6.4167*cos(omega1*t)}+ {-1.4167*cos(omega2*t)} (mm) q_3(t) = {3.8056*cos(omega1*t)}+ {1.1944*cos(omega2*t)} (mm) Response at q1 = -5.8428 mm Response at q2 = -5.8428 mm Response at q3 = 2.4611 mm Force in spring 1 = 73.8337 N Force in spring 2 = -83.0392 N Force in spring 3 = -0.0000 N Force in spring 4 = 83.0392 N Receptance = -5.8428e-005 m/N Mobility = -2.2027e-003 j m/Ns Inertance = 8.3039e-002 m/Ns^2
9
Problem 2.15 The equations of motion are Mq + Kq = 0 and assuming a harmonic solution,
= Ku Mu where n = . The system mass and stiffness matrices are
1
2
3
4
1 0 0 00 1 0 0
, kg0 0 1 00 0 0 1
= =
qqqq
q M ,
1 2 2
2 2 3 3 3
3 3 4 4
4 4
0 0 20 10 0 00 10 14 4 0 N10
0 0 4 14 10 m0 0 0 0 10 10
k k kk k k k
k k k kk k
+ + = = +
K .
(a) Remove 3q and 4q : Partition the matrices thus
1 0 0 00 1 0 0
kg0 0 1 00 0 0 1
=
M , 3
20 10 0 010 14 4 0 N100 4 14 10 m0 0 10 10
=
K .
With reference to Equation (2.114)
3 1 3 3ss ss sm
14 10 0.25 0.25 0 410 , 10 , 10
10 10 0.25 0.35 0 0 = = =
K K K
Thus, using Equation (2.115), 1ss sm
1 00 10 10 1
s
= =
IT
K K.
From Equation (2.113) T T 31 0 20 10 Nkg, 100 3 10 10 m
= = = =
r rM T MT K T KT .
The eigenvalue problem of this reduced system can be solved to give two natural frequencies. (b) Stage 1: The ratio of iik to iim is 20000, 14000, 14000 and 10000. The coordinate with the highest ratio (i.e. coordinate 1) is the first coordinate to be eliminated from the systems as follows. Reorder the rows and columns so that the new order is [ ]2 3 4 1 . Hence
2
330 0 0
4
1
1 0 0 0 14 4 0 100 1 0 0 4 14 10 0 Nkg 100 0 1 0 0 10 10 0 m0 0 0 1 10 0 0 20
r r r
qqqq
= = =
M K q .
Thus [ ] 3ss sm20000, 10 0 0 10= = K K . Hence, [ ]1 0.5 0 0ss sm= =P K K and
10
1 0 00 1 00 0 1
0.5 0 0
= =
IT
P . Hence, T1
1.25 0 00 1 0 kg0 0 1
= =
rM T MT and
2T 3
1 1 3
4
9 4 0N4 14 10 10 andm
0 10 10
= = =
r r
qqq
K T KT q (from Equation (2.115) ).
Stage 2: The ratio of iik to iim is 7200, 14000 and 10000 for coordinates 2, 3 and 4. Thus we remove coordinate with the highest ratio, coordinate 3. Reordering the rows and columns into the sequence [ ]2 4 3 we have
23
1 1 1 4
3
1.25 0 0 9 0 4N0 1 0 kg 0 10 10 10m
0 0 1 4 10 14r r r
qqq
= = =
M K q .
Thus [ ] 3ss sm14000, 4 10 10= = K K , and so [ ]1 0.2857 0.7143ss sm= =P K K
and 1 00 1
0.2857 0.7143
= =
IT
P. Hence, using Equation (2.115) gives
232 2 2
4
1.3316 0.2041 7.8571 2.8571 Nkg 100.2041 1.5102 2.8571 2.8571 mr r r
= = =
M K q .
The eigenvalue problem of this reduced system can be solved to give two natural frequencies. (c) Adding the masses at coordinates 1 and 2 together, and also at 3 and 4 together gives the following mass and stiffness matrices.
2 0kg
0 2
=
M , 1 4 4 34 4
14 4 N104 4 m
k k kk k+
= = K .
The eigenvalue problem of this reduced system can be solved to give two natural frequencies.
(d) If 1 2q q= and 3 4q q= then
1
12
33
4
1 01 00 10 1
qqqqq
q
=
.
Applying Equation (2.113) to the original mass and stiffness matrices gives 2 0
kg0 2
=
M and 314 4 N10
4 4 m
= K . These matrices are identical to those of
part (c). The MATLAB script Problem_02_15.m solves this problem and gives the following output:
11
Full system model 1st natural frequency = 4.8538 Hz 2nd natural frequency = 13.2727 Hz 3rd natural frequency = 23.5933 Hz 4th natural frequency = 26.6981 Hz Retaining q1 and q2 1st natural frequency = 6.2228 Hz 2nd natural frequency = 23.5014 Hz Reducing system by elimination coord with highest k/m term thus Retaining q2 and q4 1st natural frequency = 4.9189 Hz 2nd natural frequency = 13.8693 Hz Constraining q1 = q2 and q3 = q4 1st natural frequency = 5.735 Hz 2nd natural frequency = 13.9672 Hz Note that the reduction in stages, eliminating the coordinate with the highest iik to
iim ratio gives the most accurate estimate for the two lowest natural frequencies. Problem 2.16 If the amplitude of motion is 0x then the energy dissipated over a quarter of a cycle by the force dryf is 0dryf x . Hence over one complete cycle the energy dissipated is
04 dryW f x= . The energy dissipated over one cycle by viscous friction is 2 20
t
tW cx dt
=
== . Let ( )0 sinx x t= , ( )0 cosx x t= and so ( )2 2 2 20 cosx x t= .
Hence letting t = , 22 2 2
0 00cosW cx d c x
= = . The equivalent viscous
damping can be determined by equation energies, thus 20 04 dryW c x f x= = . Hence
the equivalent viscous damping is ( )04eq dryc f x= . The equation of motion is 0 coseqmx c x kx f t+ + = . Thus ( ) ( )02 4 2eq n dry nc m f x m = = . Hence
( )02 4 dryr f x k = where nr = . The amplitude of the response of a forced
system is
( ) ( )0
0 2 221 2
f kxr r
= +
. Thus, substituting for for a system with a dry
friction damper, we have
( )
2 22 00 2
22
0
41 dry
f kxf
rx k
=
+
. Rearranging we have
( )2 222 2 0
0 2
41 dry
f fx rk k
+ =
. Further rearrangement gives
12
( )2222 2 0
0 20
41 1 dry
ffx rfk
= . Thus
( )2
00 2
11
fxk r
=
where
0
4 dryff
=
. To ensure
that 0x is real, 21 0 > and hence 0 4dryf f > .
We can also determine the phase of the response because for a single degree of
freedom system with damping 22tan
1rr
=
. Thus ( )0
2
4tan
1dryf x k
r
=
, but
( )2
00 2
11
fx kr
=
and hence 2 2
0
4tan
1 1
dryf
f
= =
. Thus we see that the phase
angle is not a function of frequency for this system. For the above analysis to be valid, 1 < , and this implies that 0 4dryf f< . In the example, 1kgm = ,
3100 10 N mk = ,
25Hz = , 10 Ndryf = and 0 50 Nf = . Thus 316.23rad/s = =n k m ,
25 2 157.08rad/s = = and hence 0.4967= =nr . 0
4 4 10 0.254650
dryff
= = =
.
Thus ( ) ( )
2 240
0 2 5 21 50 1 0.2546 6.42 10 m 0.642mm
1 10 1 0.4967 = = =
fxk r
.
12
180 tan 14.751
= = . The MATLAB script Problem_02_16.m repeats
these calculations and gives the following output and graphical output. Natural frequency = 50.3292 Hz delta = 0.2546 Excitation frequency = 25 Response = 0.6419 mm at 14.7527 degree Excitation frequency = 55 Response = 2.4895 mm at -14.7527 degree
0 0.5 1 1.5 2
100
Frequency ratio r
Am
plitu
de
Coulomb damping. F(dry) = 10 N
0 0.5 1 1.5 20
50
100
150
Frequency ratio r
Phas
e (d
egre
es)
13
Problem 2.17 Equation of motion is 3 0 cosmx kx hx f t+ + =
(a) If we let 1 cosx x t= , 2
1 cosx x t= and 3 3 3
1 cosx x t= . Expanding this
expression in terms of multiple angles gives ( )3 31 cos3 3cos 4x x t t= + . Considering only the cos t terms, we have 3 33 14 cosx x t= . Substituting in the equation of motion and cancelling the cos t factor we obtain
2 331 1 1 04mx kx hx f + + = . Thus, ( )3 23 1 1 04 0hx k m x f+ = .
Given 50 2 314.1593/s = = 610 N mk = and 6 340 10 N mh = we can solve this cubic equation for various values of 0f .(see MATLAB function Problem_02_17.m) to obtain
0 1
0 1
0 1
0 1
30 N 2.27 mm60 N 4.40mm120 N 8.02mm240 N 13.2mm
f xf xf xf x
= =
= =
= =
= = If 55Hz = , 0 240 Nf = , 1 81.1and 1.24mmx =
When 0 0f = , ( )3 23 1 14 0hx k m x+ = . Thus ( )2 23 14 0hx k m+ = and, dividing through by m we have ( )2 2 23 1 04 0x + = where h m = and 20 k m = . Therefore 2 2 230 14 x = + . Note that if 0 > ,
2314 0x > and hence 0 > .
When 6 6 2 240 10 10 4 10 / m s = = , 2 6 5 2 20 10 10 10 rad / s = = 0.010mx = .
Thus ( )2 5 6 2 2 23410 4 10 0.01 100300rad / s = + = and so ( )100300 2 50.4046Hz = = .
(b) Letting 1 3cos cos3x x t x t= + ,
2 21 3cos 9 cos3x x t x t=
and 3 3 3 2 2 2 2 3 31 1 2 1 2 3cos 3 cos cos3 3 cos cos 3 cos 3x x t x x t t x x t t x t= + + + . Expanding the powers of the trigonometric functions in terms of multiple angles, and neglecting terms in cos p t , where 5, 7 and 9p = we have
( ) ( )3 3 2 2 3 2 31 11 1 3 1 3 1 1 3 34 43 3 6 cos 6 3 cos3x x x x x x t x x x x t= + + + + + Substituting in the equation of motion we have
( ) ( ){ }( ) ( ){ }
2 3 2 211 1 1 3 1 34
2 3 2 313 1 1 3 3 04
3 3 6 cos
9 6 3 cos3 cos
k m x h x x x x x t
k m x h x x x x t f t
+ + + +
+ + + =
Thus, equating coefficients of cos t and cos3 t gives a pair of equations thus:
( ) ( ){ }( ) ( ){ }
2 3 2 211 1 1 1 3 1 3 04
2 3 2 312 3 1 1 3 34
3 3 6 0
9 6 3 0
f k m x h x x x x x f
f k m x h x x x x
= + + + =
= + + + =
14
Let 2 21 2f f = + . Clearly when the values of 1x and 3x are the roots, 1 2 0f f= = and 0 = . The MATLAB function fminsearch.m iterates from initial values to minimise and hence solve the equations. This function is used in the MATLAB function Problem_02_17.m. From this function we have the following output Single term solution. Forcing frequency = 50Hz force = 30 N, x1 = 2.2736 mm force = 60 N, x1 = 4.4048 mm force = 120 N, x1 = 8.0172 mm force = 240 N, x1 = 13.1609 mm Single term solution: Forcing frequency = 55Hz force = 240N. x1 = 81.0725 mm and -1.2360 mm Magnitude of vibn, 10 mm. Frequency of unforced response = 50.4046 Hz Two term solution, force = 240N omega = 50 Hz x1 = 13.1604 mm, x3 = 2.8954e-003 mm omega = 55 Hz (1st solution) x1 = 80.7894 mm, x3 = 0.5636 mm omega = 55 Hz (2nd solution) x1 = -1.2360 mm, x3 = -1.9390e-006 mm Note that to obtain the second solution, when 55Hz = , the initial values were zero.
15
Chapter 3
Equations of motion for a rigid body, pinned at one end. The equations of motion for the system shown in Fig 3.26 can be developed by using Newtons 2nd law. A free body diagram for the system is shown below.
Moments acting in the direction: y d pf L I I= + where dI is the moment of inertia of the rotor about the left end. Moments acting in the direction: x d pf L I I = . In general, xf is the
force to extend a spring or give velocity to a viscous damper. Similarly for yf . Now
v L= and u L= . Hence ( ) ( )y y y y yf k v c v k L c L= + = + and ( ) ( )x x x x xf k u c u k L c L= + = + . Hence the equations of motion are
2 2
2 2
0
0
d p y y
d p x x
I I c L k L
I I c L k L
+ + + =
+ + =
Problem 3.1 In this problem there is no damping in the bearing and the stiffness is the same in the x and y directions. Hence
2
2
0
0
d p
d p
I I kL
I I kL
+ + =
+ =
or in matrix notation,
2
2
00 0 00 0 00
pd
d p
II kLI I kL
+ + =
.
Seeking solutions of the form 0j te = and 0
j te = , results in the equations 2 2
02 2 0
00
+ = +
d p
p d
I L k j I
j I I L k. This matrix must be singular and hence its
determinant is zero. Thus is the solution of ( ) ( )2 22 2 0 + + =d pI L k I or
16
( ) ( )2 22 2 + = d pI L k I . Hence ( ) ( )2 2 + = d pI L k I and so 2 2 0 =d pI I L k . For example, solving this pair of quadratics for
10,000 rev min = we have 2 2 610000 210 0.6 0.5 10 060 + =
. And
2 2 610000 210 0.6 0.5 10 060 =
. Solving these equations give
129.7888 and 192.6206 = and 129.7888 and 192.6206 = . Thus, taking the positive roots, 129.7888 rad s and 192.6206 rad s = or, converting to Hz by dividing by 2 gives 20.6565Hz and 30.6565Hz = . Alternatively, we can solve the eigenvalue problem as described by equations (3.48), (3.50), (3.51) and (3.52). The MATLAB script Problem_03_01.m gives the user the choice of solving either the characteristic equation or the eigenvalue problem to determine the system natural frequencies. Of course, both methods give the same numeric values for the frequencies which are as follows Solution of the characteristic equation Rotor speed = 0 rev/min Natural frequency = 25.1646 Hz Natural frequency = 25.1646 Hz Rotor speed = 3000 rev/min Natural frequency = 23.7093 Hz Natural frequency = 26.7093 Hz Rotor speed = 10000 rev/min Natural frequency = 20.6565 Hz Natural frequency = 30.6565 Hz
Once is calculated the relative displacements of the rotor are determined from the matrix equation above as
2 20
2 20
= =
p d
pd
j I L k Ij IL k I
. Note that for 0 = the modes are not unique.
At 3000 rev min , 148.9699 rad s and 167.8195 rad s = . 0 0 and = j j respectively. Since v L= and u L= , then 0 0 and= v u j j .
For the first mode, ( )( )
1 1 cos2
sinj ju t e e
v t j j = + =
where t = .
For the second mode, ( )( )
1 1 cos2
sinj ju t e e
v t j j = + =
.
The above is identical to Equations (3.34) and (3.35) and the text with these equations explains why the first mode (23.71 Hz) is a backward rotating mode and the second mode (26.71 Hz) is a forward rotating mode. The orbits are circular.
17
Problem 3.2. In this problem there is no damping in the bearing. Hence
2
2
0
0
d p y
d p x
I I k L
I I k L
+ + =
+ =
or in matrix notation,
2
2
0 00 00 0 00
p yd
d p x
I k LII I k L
+ + =
.
Seeking solutions of the form 0j te = and 0
j te = , results in the equations 2 2
02 2 0
00
+ = +
d y p
p d x
I L k j I
j I I L k. This matrix must be singular and hence
its determinant is zero. Thus is the solution of
( )( ) ( )22 2 2 2 0 + + =d y d x pI L k I L k I . Letting 2 = this leads to a quadratic in thus: ( )( )2 2 2 2 2 2 0 + + + =d p d x y x yI I I L k k L k k which is easily solved for given parameters. For example, when
3000 rev min 3000 2 60 314.159 rad s = = = we have 2 6 9100 6.1448 10 81.25 10 0 + = . Solving this equation gives 23997 and 33858 = and hence 138.77 and 205.40 s j j= = Taking the
positive roots we have ( ) ( )138.77 2 and 205.40 2 24.6548Hz and 29.2854Hz = =
Alternatively, we can solve the eigenvalue problem as described by equations (3.48), (3.50), (3.51) and (3.52). The MATLAB script Problem_03_02.m gives the user the choice of solving either the characteristic equation or the eigenvalue problem to determine the system natural frequencies. Of course, both methods give the same numeric values for the frequencies which are as follows Solution of the characteristic equation Rotor speed = 0 rev/min Natural frequency = 25.1646 Hz Natural frequency = 28.6921 Hz Rotor speed = 3000 rev/min Natural frequency = 24.6548 Hz Natural frequency = 29.2854 Hz Rotor speed = 10000 rev/min Natural frequency = 22.0866 Hz Natural frequency = 32.6906 Hz
Problem 3.3. In this problem there is damping and the stiffness in the bearing and the properties are the same in the x and y directions. Hence
2 2
2 2
0
0
d p
d p
I I cL kL
I I cL kL
+ + + =
+ + =
or in matrix notation,
18
2 2
2 2
0 0 00 00
pd
d p
cL II kLI I cL kL
+ + =
Since damping is included we now look for solutions of the form 0 = ste and
0 = ste , where s is complex, results in the equations
2 2 20
2 2 2 0
00
+ + = + +
d p
p d
s I sL c L k s I
s I s I sL c L k
Setting the determinant of the above array to zero we have
( ) ( )2 22 2 2 0+ + + =d ps I sL c L k s I . Hence 2 2 2+ + = d ps I sL c L k js I . This gives the following quadratic equation (with one
complex coefficient) ( )2 2 2 0+ + =d pI s L c j I s L k . For example, when 3000 rev min 3000 2 60 314.159 rad s = = = we have
( )2 410 125.00 188.50 25 10 0+ + =s j s Each equation has two roots so the two equations have together four roots (forming complex conjugate pairs) thus 6.62 167.70 and 5.88 148.85s j j= . From these roots we can obtain the damped natural frequency by taking the imaginary part of s, the natural frequency by taking the absolute values of s, and the damping, , by changing the sign of the real value divided by the absolute value of s. For example, when 6.62 167.70s j= , ( )167.7 2 26.69Hzd = = , 6.62 167.7 0.395 = =
and ( )2 26.62 167.7 2 26.71Hzn = + = . Alternatively, we can solve the eigenvalue problem as described by equations (3.48), (3.50), (3.51) and (3.52). The MATLAB script Problem_03_03.m gives the user the choice of solving either the characteristic equation or the eigenvalue problem to determine the system damped and natural frequencies. Of course, both methods give the same numeric values for the frequencies which are as follows Solution of the characteristic equation Rotor speed = 0 rev/min Damped natural freq (Hz) Natural freq (Hz) Zeta 25.1449 25.1646 0.0395 25.1449 25.1646 0.0395 Rotor speed = 3000 rev/min Damped natural freq (Hz) Natural freq (Hz) Zeta 23.6897 23.7082 0.0395 26.6897 26.7105 0.0395 Rotor speed = 10000 rev/min Damped natural freq (Hz) Natural freq (Hz) Zeta 20.6380 20.6535 0.0388 30.6380 30.6610 0.0388
19
Problem 3.4. In this case the force applied to the support in the x and y directions is
= + = x c cf ku k v kL k L and = + = y c cf k u kv k L kL . The moment acting on
the rotor in the direction is 2 2= y cLf k L kL . Similarly the moment acting on
the rotor in the direction is 2 2 = + x cLf kL k L and the equations of motion become
2 2
2 2
0
0
+ + =
+ =
d p c
d p c
I I L k L k
I I L k L k or, in matrix notation,
2 2
2 2
00 00 0 0
+ + =
pd c
d p c
II kL k LI I k L kL
Seeking solutions of the form 0ste = and 0
ste = , gives the following equation for s
2 2 2
2 2 2det 0
+ = +
d p c
p c d
s I L k s I L k
s I L k s I L k or
( ) ( )( )22 2 2 2 0+ =d p c p cs I L k s I L k s I L k and hence ( ) ( )2 4 2 2 2 2 4 2 22 0+ + + =d p d cI s I I L k s L k k , a quadratic in 2s .
For example, when 3,000 rev min = and letting 2s = , we have 2 6 10100 5.0355 10 6 10 0 + + = . Solving this quadratic gives
4 41.935 10 and 3.100 10 = . Hence 139.12 and 176.07s j j= and so ( ) ( )139.12 2 22.14 Hz and 176.07 2 28.02 Hzn = = = .
Alternatively, we can solve the eigenvalue problem as described by equations (3.48), (3.50), (3.51) and (3.52). The MATLAB script Problem_03_04.m gives the user the choice of solving either the characteristic equation or the eigenvalue problem to determine the system natural frequencies. Of course, both methods give the same numeric values for the frequencies which are as follows Solution of the characteristic equation Rotor speed = 0 rev/min Natural frequency = 22.5079 Hz Natural frequency = 27.5664 Hz Rotor speed = 3000 rev/min Natural frequency = 22.1415 Hz Natural frequency = 28.0227 Hz
Problem 3.5. This machine has the equations of motion given by Equation (3.9), with 2Tk k= ,
0Ck = and 22=Rk a k , where L is the distance between the bearings (hence
2a b L= = ). Thus the equations of motion are
20
2
2
2 02 0
2 0
2 0
+ =+ =
+ + =
+ =
d p
d p
mu kumv kv
I I a k
I I a k
or in matrix notation,
2
2
2 0 0 00 0 0 00 0 0 00 2 0 00 0 0 00 0 0 0
0 0 00 0 0 0 0 2 0 00 0 0 0 0 0 00 0 0 2
+ + =
pd
d p
km u u ukm v v v
II a kI I a k
The translational and rotational equations of motion decouple. Thus, from translational equations of motion, natural frequencies are 2k m (twice).
We now consider the 3rd and 4th equations and seek solutions of the form 0ste =
and 0ste = . Thus
2 2
2 2
2det 0
2
d p
p d
I s a k I s
I s I s a k
+ = +
gives the following equation for s
( ) ( )2 22 22 0+ + =d pI s a k I s or 2 22+ = d pI s a k jI s giving the pair of quadratics 2 22 0 + =d pI s jI s a k . At 3,000 rev min = ,
2 650 9424.8 2 10 0 + =s j s and solving this equation gives 315.34 and 126.85s j j= . Taking the positive roots,
( ) ( )315.34 2 50.19Hz and 126.85 2 20.19Hz = = = . Alternatively, we can solve the eigenvalue problem as described by equations (3.48), (3.50), (3.51) and (3.52). The MATLAB script Problem_03_05.m gives the user the choice of solving either the characteristic equation or the eigenvalue problem to determine the system natural frequencies. Of course, both methods give the same numeric values for the frequencies which are as follows Solution of the characteristic equation, Natural frequency = 14.2353 Hz (twice) Natural frequency = 20.1882 Hz Natural frequency = 50.1882 Hz
Problem 3.6. This system is described by Equation (3.84). In matrix notation, we have
0 0 0 00 0 0 0 0 00 0 0 00 0 0 0 0 00 0 00 0 0 0 0 0
0 0 0 0 00 0 0 0
+ + =
T C
T C
pd C R
d C Rp
m k ku u um k kv v v
II k kI k kI
Using the stiffness formulae gives in Appendix 2, Table A2.1, System 5, we have
21
( )( )3
12 3
4 3T uu vvEI a b
k k kb a b
+= = =
+, ( )
( )12
4 3REI a b
k k kb a b
+= = =
+ and
( )( )2
6 2 3
4 3C u vEI a b
k k kb a b
+= = =
+. Letting 0=
stu u e etc. we can solve these
equations either by forming the characteristic equation or by solving the eigenvalue problem. The characteristic equation for this system is
4 3 2 0A B C D E + + + + = where 2s = and 2 2dA m I= ,
( )2 2 22 2p d R d TB mI mI k I k m= + + , 4 2 2 22C T R T R CE k k k k k k= + 2 2 2 2 2 2 24 2 2R d T R p T d C d TC m k mI k k mI k mI k I k= + + + and
2 2 2 2 2 2 22 2 2 2T R C R p T d T C d T RD mk k mk k I k I k k I k k= + + . Clearly, these expressions are complicated and deriving them requires a fair amount of tedious algebra. Finally a quartic equation must be solved and that requires a numerical procedure. In this problem it is probably easier to solve the eigenvalue problem directly as described by equations (3.48), (3.50), (3.51) and (3.52). To determine the values of 0 0u we can either (i) extract the information from the eigenvalues, or (ii) substitute the values of s into one of the system equations. Thus, from the first system equation, since
20 0 0 0T Cms u k u k+ + = , then 0 2
0
= +
C
T
u kms k
The MATLAB script Problem_03_06.m gives the user the choice of solving either the characteristic equation or the eigenvalue problem to determine the system natural frequencies and 0 0u . Of course, both methods give the same numeric values which are as follows Solution of the EVP Rotor speed = 0 rev/min Natural frequency = 15.239 Hz. u/psi = 0.30996 Natural frequency = 15.239 Hz. u/psi = 0.30996 Natural frequency = 67.1535 Hz. u/psi = -0.21508 Natural frequency = 67.1535 Hz. u/psi = -0.21508 Rotor speed = 1000 rev/min Natural frequency = 9.9593 Hz. u/psi = 0.28808 Natural frequency = 22.1203 Hz. u/psi = 0.36325 Natural frequency = 60.0598 Hz. u/psi = -0.3347 Natural frequency = 79.1488 Hz. u/psi = -0.12689 Using the values of 0 0u we can make sketches of the mode shapes as shown below. The left column diagrams are for the stationary rotor, the right column diagrams are for the spinning rotor.
22
0 0.5 1-0.5
0
0.5
0 0.5 1-0.5
0
0.5
0 0.5 1-0.5
0
0.5
0 0.5 1-0.5
0
0.5
Problem 3.7. The equations of motion are the same as Equation (3.4), except that here a force 1xf is required to enforce the constraint 1 0u u a= = . The equations of motion are then (noting that 2a b L= = )
( )( ) ( )( ) ( )
( )
0 1
1 2
1 2
0 1
0
0
x
d p
d p x
mu k u a f
mv k v a k v a
I I ak v a ak v a
I I ak u a af
+ + =
+ + + =
+ + + =
+ + =
Adding a times the first equation to the last equation, gives ( ) ( )( ) ( )
( )
1 2
1 2
0
0
0
2 0d p
d p
mv k v a k v a
I I ak v a ak v a
mau I I ak u a
+ + + =
+ + + =
+ + + =
Now applying the constraint u a= to eliminate u gives ( ) ( )
( ) ( )
( )
1 2 1 22
1 2 1 2
2 20
0
0
4 0
d p
d p
mv k k v a k k
I I a k k v a k k
I ma I a k
+ + + =
+ + + + =
+ + =
There is an alternative way of deriving these equations. In the y-z plane the system identical to the system shown in Fig 3.6 and described by Equation (3.6). In the x-z pane the system is identical to the system described in Problem 3.1. Thus in the y-z plane (from Equations (3.6) and noting that 2a b L= = ) we have
( ) ( )( ) ( )
1 2 1 22
1 2 1 2
0
0d p
mv k k v a k k
I I a k k v a k k
+ + + =
+ + + + =
In the x-z plane (from Problem 3.1) we have 2
1 0 0d pI I k L + = where 1dI is the moment of inertia bearing 1 and 2
1d dI I ma= + so that
23
( ) ( )( ) ( )
( )
1 2 1 22
1 2 1 2
2 20
0
0
4 0
d p
d p
mv k k v a k k
I I a k k v a k k
I ma I a k
+ + + =
+ + + + =
+ + =
, as before.
Letting 0 = ste , etc, we obtain
( )( ) ( )
( )
21 2 1 2
2 21 2 1 2
2 2 20
0
det 0
0 4
d p
p d
ms k k a k k
a k k I s a k k I s
I s I ma s a k
+ + + + = + +
From this determinant we can obtain the characteristic equation thus Part 1 When 0 = . Here the 3rd equation is uncoupled from the other two and so we obtain ( )2 2 204 0dI ma s k a+ + = and ( )( )4 2 2 21 2 1 24 0d dmI s I ma k k s a k k+ + + + = . The linear equation in 2s and the quadratic equation in 2s can easily be solved. Part 2. When 1 2k k k= = . Here the 1
st equation uncouples from the other two and so
we obtain ( ) ( ){ }2 4 2 2 2 2 2 2 40 02 4 8 0d d d d pI I ma s ka I ma k a I I s a k k+ + + + + + = and 2 2 0ms k+ = . The linear equation in 2s and the quadratic equation in 2s can easily be solved. Alternatively, in matrix notation we have
( )( ) ( )
2
1 2 1 22
1 2 1 22
0
0 0 0 0 00 0 0 0
0 00 0
0 00 0
00 0 4
d p
pd
m v vI I
II ma
k k a k k va k k a k k
a k
+ +
+ + + =
These equations can be rearranged into the form =Ax + Bx 0 , and the eigenvalue problem can be solved as described by equations (3.48), (3.50), (3.51) and (3.52). The MATLAB script Problem_03_07.m gives the user the choice of solving either the characteristic equation or the eigenvalue problem to determine the system natural frequencies. Of course, both methods give the same numeric values for the frequencies which are as follows Solution of the characteristic equation Rotor speed = 0 rev/min Stiffness k1 = 1800000 N/m Stiffness k2 = 2200000 N/m Natural frequency = 28.8598 Hz Natural frequency = 36.5126 Hz Natural frequency = 56.3715 Hz
24
Rotor speed = 9550 rev/min Stiffness k1 = 2000000 N/m Stiffness k2 = 2000000 N/m Natural frequency = 29.0576 Hz Natural frequency = 33.8302 Hz Natural frequency = 60.7316 Hz
Problem 3.8. Using the stiffness formulae gives in Appendix 2, Table A2.4, System 6 with
2a b L= = and 1 2k k= , we have ( )236 3D EI a k= + , 0C u vk k k = = = , ( )3 2
6
6 3T uu vvEIk k k EIk a k
D= = = + and ( )2 5 2
6
6EIk k EIa k a kD
= = + . The
equations of motion for the system are 00
00
+ =+ =
+ =
+ =
T
T
d R
d R
mu k umv k v
I kI k
Note that because 0Ck = and gyroscopic effects are ignored the four equations are uncoupled from each other and can be solved independently of each other. Thus, letting 0
= j tu u e etc. we have we have n Tk m = (twice) and n R dk I = . Simply supported beam with central disk: From Appendix 2, Table A2.1, System 1 with 2a b L= = we have 36ssTk EI a= , 6
ssRk EI a= and 0
ssCk = . Thus we can
compute the natural frequencies as above, i.e. ssn Tk m = (twice) and ss
n R dk I = . Rigid rotor: The stiffness coefficients for this system are given (3.7) so that
2rgdTk k= , 22rgdRk a k= and 0
rgdCk = . Again, the equations uncouple so that the
frequency equations are as above. Although these calculations are simple we have written a MATLAB script to carry them out. Thus The MATLAB script Problem_03_08.m determines the system natural frequencies for the three models, as follows. Bearing stiffness = 50000N/m Full model (Hz) Simply supported beam (Hz) Rigid rotor (Hz) 1st Mode: 13.2231 72.1384 13.4510 2nd mode: 34.9851 190.8604 35.5881 Bearing stiffness = 1000000N/m Full model (Hz) Simply supported beam (Hz) Rigid rotor (Hz) 1st Mode: 46.1998 72.1384 60.1549 2nd mode: 122.2332 190.8604 159.1549 Bearing stiffness = 100000000N/m Full model (Hz) Simply supported beam (Hz) Rigid rotor (Hz) 1st Mode: 71.6252 72.1384 601.5491 2nd mode: 189.5026 190.8604 1591.5494 These results show that when the bearing stiffness is low the system behaves like a
25
rigid rotor on flexible supports. When the bearing stiffness is high, the system behaves like a simply supported flexible beam. At the intermediate stiffness (1MN/m) only the full model adequately describes the system. Problem 3.9. The data of Table 3.4 gives the eigenvalues and eigenvectors for a rotor supported by (a) isotropic bearings and (b) anisotropic bearings. The natural frequencies of the system are determined from the eigenvalues, i.e. ( ) ( )imag 2n s = . The method to determine the shape of an orbit and direction of whirl is described in Section 3.6.1. Equation (3.55) requires amplitude and phase of the displacements in the x and y directions. From this the shape of the orbit can be determined (, given in Equation (3.60)) and the direction of whirl given by the sign of . The displacements in the x and y directions at the two ends of the rotor are given by Equation (3.61). The MATLAB script Problem_03_09.m analyses the isotropic and the anisotropic bearing case. The script begins by regenerates the data of Table 3.4 and then determines T (Equation (3.56)), T=H TT , and then the eigenvalues of H . From these eigenvalues the script determines and the direction if rotation. The MATLAB script Problem_03_09.m determines the system natural frequencies and values of , thereby giving the shape and direction of the orbit at various locations along the rotor. [-ve kappa: backward whirl, +ve kappa: forward whirl] Isotropic bearings omega_n (Hz) 47.4044 47.4233 88.8962 154.9324 x-y orbit at rtr centre kappa: -1.0000 1.0000 -1.0000 1.0000 Rotation at rtr centre kappa: -1.0000 1.0000 -1.0000 1.0000 x-y orbit at bearing 1 kappa: -1.0000 1.0000 -1.0000 1.0000 x-y orbit at bearing 2 kappa: -1.0000 1.0000 -1.0000 1.0000 Isotropic bearings omega_n (Hz) 47.4140 50.3203 91.6220 157.8805 x-y orbit at rtr centre kappa: -0.0067 0.0076 -0.4441 0.3827 Rotation at rtr centre kappa: -0.2558 -0.2926 -0.8889 0.9348 x-y orbit at bearing 1 kappa: 0.0012 0.0297 -0.9120 0.9286 x-y orbit at bearing 2 kappa: -0.0212 -0.0286 -0.8770 0.9380 As expected, for the isotropic bearings, the orbits are circular. For the anisotropic bearings, the orbits are elliptic and some of the modes are forward, some are backward and some are a mixture. For example the mode at frequency 47.414 Hz has a forward whirl at bearing 1, but backward at the centre of the rotor and at bearing 2.
Problem 3.10. The equations of motion of this system are given by Equation (3.9) (or Equation (3.26)) with 2=Tk k , 0Ck = and
20.5Rk L k= (since 2= =a b L ). Thus
2
2
2 02 0
0.5 0
0.5 0
d p
d p
mu kumv kv
I I L k
I I L k
+ =+ =
+ + =
+ =
.
We know that 30kgm = . The first and second equations are uncoupled from the
26
third and fourth equations and are independent of speed. Thus one natural frequency is independent of speed and from the 1st or 2nd equation is given by 1 2k m = .
Hence ( )2210.5 0.5 30 2 7.1 29.8516kN mk m= = = The other natural frequency, when 0 = , is obtained from the 3rd or 4th equation is
given by 22 0.5 dL k I = Thus
( )
2 2 32
2 22
0.5 0.5 0.8 29.8516 10 0.53838kg m2 21.2
dL kI = = =
When the rotor spins the second pair of natural frequencies are given by the solutions to equation (3.29), that is
( ) ( )2 22 0d R pI k I + = . Thus 2
d Rp
I kI +=
where the natural frequency is 2 46.7 rad s = and the rotor spin speed is
2000 2 60 209.44 rad s = = . 2 20.5 0.5 0.8 29851.6 9552.5 Nm= = =Rk L k
and hence 20.59883kg mpI = .
Problem 3.11. The development in Section 3.6.1 is reworked with the eigenvalue i is j= and the corresponding mode. Consider first the calculation of the lengths of the semi-major and semi-minor axes - the mode considered here will be the complex conjugate of the mode used in Section 3.6.1, and hence the matrix T will be post multiplied by
1 00 1
. Thus H will be as given in Section 3.6.1 and thus so will be the lengths of
the semi-major and semi-minor axes. The only question that remains is to determine the direction of whirl. If u and v are the angle corresponding to the new mode with eigenvalue i is j= then the equivalent equations to Equation (3.59) is
( )( )
( )( )
( )( )( )coscos
coscosu iu i
u v u iu v u i
r tu t r tr tv t r t
= = + +
and hence the same conclusions can be draw about the direction of whirl by making ( )v u negative. Thus in this case ( )0 v u< < implies forward whirl and
( ) 0v u < < implies backward whirl.
Problem 3.12 Since the rotor is stationary and the bearings are also isotropic we only need to consider motion in, say, the x direction. Using the stiffness formulae gives in Appendix 2, Table A2.4, System 6, and letting 1k gives
( )3 36 1 23D a k EI b k= + , ( )3 31 1 26
3 3uuEIk EIk a b k k
D = + +
,
( ) ( )2 21 1 26
3 3uEIk EI ak ab a b k k
D = +
,
27
( )2 2 21 1 26
3 3EIk EIa k a b a b k kD
= + + .
Since 1k is a factor in both the numerators and the denominator of the above equations, these simplify to
( )3 36 23D a EI b k= + , ( )3 3 26
3 3T uuEIk k EI a b k
D = = + +
( )2 2 26
3 3C uEIk k EIa ab a b k
D = = +
, ( )2 2 2 26
3 3REIk k EIa a b a b k
D = = + +
Thus the equations of motion are 0 0
0 0T C
d C R
m k ku uI k k
+ =
.
From this equation we can obtain + =Mq Kq 0 and hence the eigenvalue 2
0 0s + =Mq Kq 0 . This can be solved to obtain the two system natural frequencies.
Using the reduction formulae of Appendix 2, 2red T C Rk k k k= and 2 2
red D C Rm m I k k= + . Hence the frequency of the reduced model is
_n red red redk m = . The MATLAB script Problem_03_12.m solves the eigenvalue problem to determine the system natural frequencies and the natural frequency of the reduced model, which are as follows Disk diameter/thickness 0.650/0.065 1.200/0.120 1st natural frequency (Hz) 17.4505 6.4971 2nd natural frequency (Hz) 68.5833 15.8084 Reduced model, nat freq (Hz) 17.4785 6.6074
Problem 3.13 (a) Using the formulae gives in Appendix 1: For the cylinder, 2 2 28 100 0.4 8 2kg mpI MD= = = ,
2 2 22 12 2 2 100 0.6 12 4 kg md pI I Mh= + = + = .
For the disk, 2 2 28 100 1.4 8 24.5kg mpI MD= = = 2 2 22 12 24.5 2 100 0.1 12 12.3333kg md pI I Mh= + = + =
The center of gravity of the system, relative to bearing number 1 is given by Mz z M = and hence 100 0.8 100 1.6 200z + = . Thus 1.2mz = .
For the total system, ( ) ( )22 24.5 26.5kg mp p cyl p dskI I I= + = + =
( ) ( )( ) ( )
2 2
2 2 24 100 0.4 12.3333 100 0.4 48.3333kg m
d dC dCcyl dskI I Mh I Mh= + + +
= + + + =
(b) ( )48.3333 5 241.66 N mx dM I= = = 7000 226.5 2 38,851N m
60y pM I = = =
(c) Acceleration of the centre of gravity is 0.4ca g z g= + . Thus
28
( ) 20.4 9.81 1.2 5 9.81 19.7340 m sca = + + = . Denoting a vertical force by V, 200 19.7340 3946.8Nc cV Ma= = = . The distance from bearing 1 to bearing 2 is
2 1.3mbz = . 2 2 1.3 1.2 0.1mbz z z= = = .
( ) ( )1 2 2 241.66 0.1 3946.8 1.3 117,7Nb x c bV M z V z= + = + = 2 1 3946.8 117.7 3829.1Nb c bV V V= = =
Denoting a vertical force by H, 2 38851 1.3 29,885Nb y bH M z= = = The horizontal force acting n the bearings are equal and opposite. The MATLAB script Problem_03_13.m repeats these calculations thus: CofG. Distance from brg 1 = 1.2000 m Combined system, Id = 48.3333 kg m^2 Combined system, Ip = 26.5000 kg m^2 Moment_y = 38851.0291 Nm Moment_x = -241.6667 Nm Vertical load brg 1 = 117.7026 N Vertical load brg 2 = 3829.0974 N Horizontal loads = 29.8854 kN and -29.8854 kN
29
Chapter 4
In this chapter almost all the solutions require either the element matrices for the axial deflection of a bar or the lateral deflection of a beam. These are given in text and are repeated here for convenience. For a bar in axial vibration (see Equation (4.12) for details)
2 1 1 1,
1 2 1 16e e e e e
e ee
A l E Al
= =
M K .
For a beam in bending (see Equations (4.24) and (4.25) for details)
2 2 2 2
3
2 2 2 2
156 22 54 13 12 6 12 6
22 4 13 3 6 4 6 254 13 156 22 12 6 12 6420
13 3 22 4 6 2 6 4
e e e e
e e e e e e e ee e e e es s
e e e ee
e e e e e e e e
l l l l
l l l l l l l lA l E Il l l ll
l l l l l l l l
= =
M K .
Problem 4.1 Assembling two axial deflection elements of equal length ( 2el L= ) gives:
2 1 0 0 0 0 2 1 01 2 0 0 2 1 1 4 1
6 2 6 2 6 20 0 0 0 1 2 0 1 2
A L A L A L
= + =
M .
1 1 0 0 0 0 1 1 02 2 21 1 0 0 1 1 1 2 1
0 0 0 0 1 1 0 1 1EA EA EA
L L L
= + =
K .
With free-free boundary conditions there are no constraints to be applied. Forming and solving the eigenvalue problem = Ku Mu , where 2 = , gives three natural frequencies. The lowest one is zero, because the unconstrained bar can move as a rigid body. With fixed-free boundary conditions we must eliminate the first row and column from the system matrices. Thus
4 1 2 12,1 2 1 16 2
A L EAL
= = M K .
Forming and solving this eigenvalue problem gives two natural frequencies. The MATLAB script Problem_04_01.m solves the above eigenvalue problems to give In model, rho = A = E = L = 1 Free-free system - 1st elastic freq = 3.4641 rad/s Fixed-free system - 1st freq = 1.6114 rad/s
Adding a force ( )f t to the free end gives ( )0
f t
+ =
Mq Kq .
30
Problem 4.2 Assembling two axial deflection elements of equal length gives:
2 1 0 0 0 0 2 1 01 2 0 0 2 1 1 4 1
6 2 6 2 6 20 0 0 0 1 2 0 1 2
A L A L A L
= + =
M .
1 1 0 0 0 0 1 1 02 2 21 1 0 0 1 1 1 2 1
0 0 0 0 1 1 0 1 1EA EA EA
L L L
= + =
K .
Note that 2el L= . With fixed-fixed ends we must eliminate the first and third rows and columns to give
[ ] [ ]24 , 212AL EA
L
= =M K . These are, of course, scalar quantities and so
2 212 3.4641n E L E L = = Assembling three axial deflection elements of equal length gives
2 1 0 0 0 0 0 0 0 0 0 01 2 0 0 0 2 1 0 0 0 0 0
6 3 0 0 0 0 6 3 0 1 2 0 6 3 0 0 2 10 0 0 0 0 0 0 0 0 0 1 2
A L A L A L = + +
M
1 1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 1 1 0 0 0 0 03 3 3
0 0 0 0 0 1 1 0 0 0 1 10 0 0 0 0 0 0 0 0 0 1 1
EA EA EAL L L
= + +
K .
Hence 2 1 0 0 1 1 0 01 4 1 0 1 2 1 03,0 1 4 1 0 1 2 16 30 0 1 2 0 0 1 1
= =
A L EAL
M K .
Eliminating the first and fourth rows and columns gives 4 1 2 13,1 4 1 218
AL EAL
= =
M K . The eigenvalue problem can be formed and
solved to give two natural frequencies Assembling four axial deflection elements of equal length gives
2 1 0 0 0 1 1 0 0 01 4 1 0 0 1 2 1 0 0
4,0 1 4 1 0 0 1 2 1 06 4
0 0 1 4 1 0 0 1 2 10 0 0 1 2 0 0 0 1 1
= =
A L EAL
M K
Eliminating the first and fifth rows and columns gives
31
4 1 0 2 1 041 4 1 , 1 2 1
240 1 4 0 1 2
s sAL EA
L
= =
M K . The eigenvalue problem can be
formed and solved to give three natural frequencies. The MATLAB script Problem _04_02.m solves the above formulations to give In model, rho = A = E = L = 1 clamped-clamped, 2 element- 1st nat freq = 3.4641 rad/s clamped-clamped, 3 element- 1st nat freq = 3.2863 rad/s clamped-clamped, 4 element- 1st nat freq = 3.2228 rad/s Problem 4.3 Modelling the system with two elements
1 1 0 0 0 0 0 0 02 21 1 0 0 1 1 0 0 0
0 0 0 0 1 1 0 0EA EA
L Lk
= + +
K
2 1 0 0 0 01 2 0 0 2 1
6 2 6 20 0 0 0 1 2
A L A L
= +
M . Thus
*
2 1 0 1 1 021 4 1 , 1 2 1
6 20 1 2 0 1 1
A L EAL
k
= = +
M K where * 2k kL EA= .
The bar is clamped at the left hand end, so we must eliminate the first row and column to give
*
2 14 1 2,1 212 1 1
AL EAL k
= = +
M K . Since 2k EA L= , * 0.25k = and hence
4 1 2 12,1 2 1 1.2512
AL EAL
= =
M K . Solving the eigenvalue problem (see
MATLAB script Problem_04_03.m gives In model, rho = A = E = L = 1, k0 = E*A/(2*L) Clamped-free system with spring - 1st freq = 1.9027 rad/s Problem 4.4 Modelling the system with two elements
1 1 0 0 0 02 21 1 0 0 1 1
0 0 0 0 1 1EA EA
L L
= +
K
2 1 0 0 0 0 0 0 01 2 0 0 2 1 0 0 0
6 2 6 20 0 0 0 1 2 0 0
A L A L
m
= + +
M . Thus
32
*
2 1 0 1 1 021 4 1 , 1 2 1
6 20 1 10 1 2
A L EAL
m
= = +
M K where * 12m m AL= .
The bar is clamped at the left hand end, so we must eliminate the first row and column to give
*
4 1 2 12,1 112 1 2
AL EALm
= = +
M K . Since 3m AL= , * 36m = and hence
4 1 2 12,1 38 1 112
AL EAL
= =
M K . Solving the eigenvalue problem must be
solved, (see MATLAB script Problem_04_04.m) gives In model, rho = A = E = L = 1, m0 = 3*rho*A*L Clamped-free system with mass - 1st freq = 0.54733 rad/s Problem 4.5 Assembling an axial deflection element of length 3 4L and an axial deflection element of length 4L gives
2 1 0 0 0 0 6 3 03 1 2 0 0 2 1 3 8 1
6 4 6 4 6 40 0 0 0 1 2 0 1 2
A L A L A L
= + =
M
1 1 0 0 0 0 1 1 04 4 41 1 0 0 1 1 1 4 3
3 30 0 0 0 1 1 0 3 3
EA EA EAL L L
= + =
K
Since the left hand end is clamped, we must eliminate the first row and column, thus 8 1 4 34,1 2 3 324 3
AL EAL
= =
M K . The eigenvalue problem can be formulated
and solved, see MATLAB script Problem_04_05.m. Assembling two axial deflection elements, each of length 2L , and applying the boundary conditions has been carried out in Problem 4.1, part (b) and the system matrices are
4 1 2 12,1 2 1 112
AL EAL
= =
M K . Again the eigenvalue problem can be
formulated and solved. Problem_04_05.m gives In model, rho = A = E = L = 1 Clamped-free with equal length elements - 1st freq = 1.6114 rad/s Clamped-free with unequal length elements - 1st freq = 1.6157 rad/s Problem 4.6 The arrangement of rows and columns for a lateral displacement element is [ ]1 1 2 2u u . Thus using a single element to model a pinned-pinned beam, we must eliminate the first and third rows and columns. Hence
33
2 2 2 2
32 2 2 2
4 3 4 2420 3 4 2 4
L L L LAL EILL L L L
= =
M K
We can formulate and solve the eigenvalue problem to determine the system natural frequencies, see MATLAB script Problem_04_06.m. Running this scripts gives In model, rho = A = E = I = L = 1 Pinned-Pinned system with one element - 1st freq = 10.9545 rad/s Problem 4.7 Assembling two lateral deflection elements of equal length gives:
2 2
2 22 2
2 2
0 0 0 0 0 0156 22 54 13 0 00 0 0 0 0 022 4 13 3 0 00 0 156 22 54 1354 13 156 22 0 00 0 22 4 13 3420 13 3 22 4 0 00 0 54 13 156 220 0 0 0 0 00 0 13 3 22 40 0 0 0 0 0
e e
e e e ee ee ee
e e e ee e e ee e
e e e e
l l
l l l ll ll lAl
l l l ll l l ll l
l l l l
= +
M
2 2
2 23 2 2
2 2
0 0 0 0 0 012 6 12 6 0 00 0 0 0 0 06 4 6 2 0 00 0 12 6 12 612 6 12 6 0 00 0 6 4 6 26 2 6 4 0 00 0 12 6 12 60 0 0 0 0 00 0 6 2 6 40 0 0 0 0 0
e e
e e e ee ee e
e e e ee e e e ee e
e e e e
l l
l l l ll ll lEI
l l l ll l l l ll l
l l l l
= +
K
where 2el L= . Note that pairs of rows and columns are overlapped because we are making both the slope and deflection at the right hand end of the first element to be equal to the corresponding slope and column of the left hand end of the second element. For a clamped-clamped beam the first, second, fifth and sixth rows and columns must be eliminated to give
2 23
312 0 24 0,
420 0 8 0 8e
e ee
Al EIl ll
= =
M K .
Thus ( )
111 4 4
11
24 420 22.73592 312
k EI EIm ALA L
= = =
The MATLAB script Problem_04_07.m) repeats this calculation thus: In model, rho = A = E = I = L = 1 Clamped-clamped system with two element - 1st freq = 22.7359 rad/s Problem 4.8 The assembly of two lateral deflection elements of equal length is shown in Problem 4.7 (above) where 2el L= . For a clamped-pinned beam the first, second and fifth rows and columns must be eliminated to give
34
2 2
2 2
312 0 13
0 8 3420
13 3 4
ee
e e
e e e
lAl l l
l l l
=
M 2 232 2
24 0 6
0 8 2
6 2 4
e
e ee
e e e
lEI l ll
l l l
=
K . Solving the resultant
eigenvalue problem (see MATLAB script Problem_04_08.m) gives In model, rho = A = E = I = L = 1 Clamped-pinned system with two element - 1st freq = 15.5608 rad/s Problem 4.9 Using a single element, el L= . Because the beam is clamped at the left hand end, the first and second rows and columns of the element matrices must be eliminated. Introducing an extra coordinate ( 3q in Figure 4.21) and adding the effect of a concentrated mass m at 3q , we have
2 2
*
156 22 0 156 22 00 0 022 4 0 0 0 0 22 4 0
420 4200 0 0 0 0 0 0
L LAL ALL L L L
m m
= + =
M where
* 420m m AL= . Adding a spring of stiffness k between 1q and 3q , gives *
12 2
23 3* * 3
12 6 0 12 * 606 4 0 0 0 0 6 4 00 0 0 0 0
+ = + = =
L k L kk k qEI EIL L L L qL Lk k qk k
K q
where * 3k kL EI= . Thus the equation of motion is + =Mq Kq 0 . Note that there is an error in the stiffness matrix given in the solution for this problem in the text book. Problem 4.10 Consider Equation (4.37). Since the cross sectional area is now a function of we must rewrite the integral in the first equation of (4.37) as
( ) ( )( ) ( )( )( )( )
T1 1
1 1 2 20 2 2
el e ee e
e e
N NA N A N d
N N +
Hence ( ) ( )
( ) ( )
21 1 2 2 1 1 1 2 2 1 2
201 1 2 2 1 2 1 1 2 2 2
el e e e e e e e
e e e e e e e
A N A N N A N A N N Nd
A N A N N N A N A N N
+ +
+ + where ( )1 1e eN N= , etc.
Now ( )11
ee
Nl
= and ( )11
ee
Nl
= .
Consider (for example) the element in row 1, column 2. 2 2
1 2 1 2200
1 21 22
1 1 112 2
1 12 2 2 2
e
e
ll
e e e e e ee
e ee
ee
A A d A Al l l l l ll
l l A AA l All
+ = +
= + = +
35
Completing all the integrations gives 1 2 1 1
1 12e e
A AEl
+ = K
Rewriting the integral in the first equation of Equation (4.39) to account for the variation of cross section area,
( ) ( )( ) ( )( )( )( )
T1 1
1 1 2 20 2 2
el e ee e
e e
N NA N A N d
N N +
Hence ( ) ( )
( ) ( )
21 1 2 2 1 1 1 2 2 1 2
201 1 2 2 1 2 1 1 2 2 2
el e e e e e e e
e e e e e e e
A N A N N A N A N N Nd
A N A N N N A N A N N
+ + + +
Consider (for example) the element in row 1, column 2.
( ) ( ) ( )( )2 22 22 21 1 2 2 1 2 1 20 0 1 2 1e e e e ee el le e e e l l ll lA N N A N N d A A d + = + + . Competing the integration process gives ( )1 2 12el A A + . Completing all the integrations, we have
1 2 1 2
1 2 1 2
3312
ee
A A A AlA A A A
+ + = + +
M
(a) Using tapered elements Let 1 2 3, ,A A A be the cross section area at the clamped end, at the mid point and at the free end of the bar. Then the assembled matrices are
2 31 21 1 0 0 0 01 1 0 0 1 1
2 20 0 0 0 1 1e e
A AA AE El l
++ = +
K and
1 2 1 2
1 2 1 2 2 3 2 3
2 3 2 3
3 0 0 0 03 0 0 3
12 120 0 0 0 3
e eA A A A
l lA A A A A A A AA A A A
+ + = + + + + +
+ +
M where 2el L= .
(a) Using uniform elements Let 1 2 3, ,A A A be the cross section area at the clamped end, at the mid point and at the free end of the bar. The mean cross sectional area of the first element is ( )1 2 2A A+ and for the second element is ( )2 3 2A A+ . Then the assembled matrices are
2 31 21 1 0 0 0 01 1 0 0 1 1
2 20 0 0 0 1 1e e
A AA AE El l
++ = +
K and
2 31 22 1 0 0 0 01 2 0 0 2 1
6 2 6 20 0 0 0 1 2
e el l A AA A
++ = +
M where 2el L=
Note that in both models the assembled stiffness matrices are identical, In each case we apply the boundary condition we must eliminate the first row and column of the
36
assembled matrices. The MATLAB script Problem_04_10.m develop both models for the linearly tapered bar and solves the resulting eigenvalues as follows: In model, rho = E = I = L = 1. A varies linearly from 0.2 to 0.1 Clamped-free system: two tapered element - 1st freq = 1.8279 rad/s Clamped-free system: two uniform element - 1st freq = 1.7933 rad/s Problem 4.11 (a) Modelling the bar with three elements gives
2 1 0 0 0 0 0 0 0 0 0 01 2 0 0 0 2 1 0 0 0 0 00 0 0 0 0 1 2 0 0 0 2 16 3 6 3 6 30 0 0 0 0 0 0 0 0 0 1 2
A L A L A L = + +
M
1 1 0 0 0 0 0 0 0 0 0 01 1 0 0 0 1 1 0 0 0 0 03 3 3
0 0 0 0 0 1 1 0 0 0 1 10 0 0 0 0 0 0 0 0 0 1 1
EA EA EAL L L
= + +
K
Applying the boundary condition by eliminating the first row and column gives 2 1 0 4 1 0
3 1 2 1 and 1 4 16 3
0 1 1 0 1 2
A LEAL
= =
K M
The eigenvalue problem can be formulated and solved, see the MATLAB script Problem_04_11.m. (b) Using a single element
2 1 1 1,
1 2 1 16AL EA
L
= = M K
Applying the boundary condition by eliminating the first row and column gives
2 6,m AL k EA L= = and thus 23k m E L = = (c) To reduce the model
2 1 03 1 2 1
0 1 1EA
L
=
K . Thus 2 131 2ss
EAL
= K and hence
1 2 111 23 3ss
LEA
= K .
031sm
EAL
= K and thus
1 2 1 0 1 311 2 1 2 33ss sm
= = K K . Thus we have
1 32 31
=
T
Tr EA L= =K T KT and
T 3r AL= = M T MT .
Now 23k m E L = = . This is identical to the frequency given by a single degree of freedom system.
37
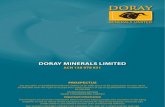
The MATLAB script Problem_04_11.m solves .the three cases of this problems and gives the following results In model, rho = A = E = L = 1 Clamped-free: 3 elements - 1st freq = 1.5888 rad/s Clamped-free: 1 element - 1st freq = 1.7321 rad/s Clamped-free: Reduced model - 1st freq = 1.7321 rad/s Problem 4.12 Assembling a large number of elements can only be done realistically using a computer. The MATLAB script Problem_04_12.m assembles a number of axial deflection elements and applies the boundary conditions, The first three system natural frequencies are computed using 3, 4, 6 and 8 elements, thus: In model, rho = A = E = I = L = 1 No of elements 1st nat freq 2nd nat freq 3rd nat freq (rad/s) 3 9.8776 39.9451 98.5901 4 9.8722 39.6342 90.4495 6 9.8701 39.5104 89.1770 8 9.8698 39.4887 88.9407 Exact 9.8696 39.4784 88.8264 The also script computes the first three natural frequencies using up to 64 elements and plots the percentage error against the number of elements,
0 10 20 30 40 50 60 7010-8
10-6
10-4
10-2
100
102
Number of Elements
% E
rror
38
Chapter 5
Note. Solving Problems 5.1, 5.2, 5.3, 5.8, 5.9 and 5.11 requires a finite element analysis that allows shafts to be modelled and include gyroscopic effects, etc. Here we use the rotordynamics software developed to accompany this book, but other appropriate software can be used. Problem 5.1 Modelling this problem requires finite element analysis (FEA) and can only be solved using appropriate FEA software. Here MATLAB script Problem_05_01.m makes use the Rotordynamics Software package to model and analyse the system. The diagrams below, generated by the script, shows the solid and hollow rotors modelled with 16 elements.
Brg Type 1 Brg Type 1
Nod
e 1
Nod
e 2
Nod
e 3
Nod
e 4
Nod
e 5
Nod
e 6
Nod
e 7
Nod
e 8
Nod
e 9
Nod
e 10
Nod
e 11
Nod
e 12
Nod
e 13
Nod
e 14
Nod
e 15
Nod
e 16
Nod
e 17
Solid shaft modelled with 16 elements.
Brg Type 1 Brg Type 1
Nod
e 1
Nod
e 2
Nod
e 3
Nod
e 4
Nod
e 5
Nod
e 6
Nod
e 7
Nod
e 8
Nod
e 9
Nod
e 10
Nod
e 11
Nod
e 12
Nod
e 13
Nod
e 14
Nod
e 15
Nod
e 16
Nod
e 17
Hollow shaft modelled with 16 elements
The output of the script is as follows:
39
Solid shaft, 16 Timoshenko elements Natural Frequency 1 = 16.1328 Hz Natural Frequency 2 = 17.1523 Hz Natural Frequency 3 = 64.0008 Hz Natural Frequency 4 = 68.8696 Hz Natural Frequency 5 = 144.2202 Hz Solid shaft, 16 Euler-Bernoulli elements Natural Frequency 1 = 16.1527 Hz Natural Frequency 2 = 17.1776 Hz Natural Frequency 3 = 64.3551 Hz Natural Frequency 4 = 69.3417 Hz Natural Frequency 5 = 144.601 Hz Hollow shaft, 16 Timoshenko elements Natural Frequency 1 = 16.6622 Hz Natural Frequency 2 = 17.7754 Hz Natural Frequency 3 = 64.7167 Hz Natural Frequency 4 = 69.5014 Hz Natural Frequency 5 = 145.6799 Hz Hollow shaft, 16 Euler-Bernoulli elements Natural Frequency 1 = 16.7702 Hz Natural Frequency 2 = 17.9158 Hz Natural Frequency 3 = 66.6536 Hz Natural Frequency 4 = 72.1014 Hz Natural Frequency 5 = 147.602 Hz Solid shaft: difference in nat freq 1 = 0.1234% Solid shaft: difference in nat freq 2 = 0.1479% Solid shaft: difference in nat freq 3 = 0.55356% Solid shaft: difference in nat freq 4 = 0.68546% Solid shaft: difference in nat freq 5 = 0.26401% Hollow shaft: difference in nat freq 1 = 0.64794% Hollow shaft: difference in nat freq 2 = 0.78969% Hollow shaft: difference in nat freq 3 = 2.993% Hollow shaft: difference in nat freq 4 = 3.7408% Hollow shaft: difference in nat freq 5 = 1.3194% The inside and outside diameters of the hollow shaft are chosen to make the natural frequencies of the hollow shaft system very close to those of the solid shaft. However, the differences between the natural frequencies obtained using Euler-Bernoulli and the Timoshenko elements are greater for the hollow shaft than for the solid shaft.
40
Problem 5.2 Modelling this system requires finite element analysis (FEA) and can only be solved using appropriate FEA software. Here MATLAB script Problem_05_02.m makes use the Rotordynamics Software package to model and analyse the system. The diagram below, generated by the script, shows the rotor, modelled with 16 elements.
Brg Type 1 Brg Type 1
Nod
e 1
Nod
e 2
Nod
e 3
Nod
e 4
Nod
e 5
Nod
e 6
Nod
e 7
Nod
e 8
Nod
e 9
Nod
e 10
Nod
e 11
Nod
e 12
Nod
e 13
Nod
e 14
Nod
e 15
Nod
e 16
Nod
e 17
Rotor modelled with 16 elements
The output of the script is as follows: First five natural Frequencies (Hz) 4 elements 8 elements 16 elements 25.0929 25.0928 25.0928 30.1380 30.1378 30.1378 59.4160 59.4145 59.4144 65.9957 65.9937 65.9935 162.5512 162.5205 162.5182 Note that as the number of elements is increased the change in a particular estimated frequency decreases. Problem 5.3 Modelling this problem involves finite element analysis (FEA) and can only be solved using appropriate FEA software. Here MATLAB script Problem_05_03.m makes use the Rotordynamics Software package to model and analyse the system. The diagrams below, generated by the script, shows the rotor models. In model 1, four tapered elements and three uniform elements are used, in model 2, seven uniform elements of different diameters are used and in model 3, eleven uniform elements if different diameters are used. In models 2 and 3 the diameters of the uniform elements are chosen to be the average of the shaft diameters at each end of the element.
41
Brg Type 1 Brg Type 1
Nod
e 1
Nod
e 2
Nod
e 3
Nod
e 4
Nod
e 5
Nod
e 6
Nod
e 7
Nod
e 8
Model 1. Model with 4 tapered elements and 3 uniform elements.
Brg Type 1 Brg Type 1
Nod
e 1
Nod
e 2
Nod
e 3
Nod
e 4
Nod
e 5
Nod
e 6
Nod
e 7
Nod
e 8
Model 2. Model with 7 uniform elements of three different diameters.
Brg Type 1 Brg Type 1
Nod
e 1
Nod
e 2
Nod
e 3
Nod
e 4
Nod
e 5
Nod
e 6
Nod
e 7
Nod
e 8
Nod
e 9
Nod
e 10
Nod
e 11
Nod
e 12
Model 3. Model with 11 uniform elements of different diameters.
42
The output of script is as follows: Model 1. Seven tapered and uniform elements Natural frequency 1 = 27.7103 Hz, Error = 0.0183 Natural frequency 2 = 32.5623 Hz, Error = 0.0343 Natural frequency 3 = 40.8942 Hz, Error = 0.1192 Natural frequency 4 = 50.9622 Hz, Error = 0.2002 Natural frequency 5 = 93.1906 Hz, Error = 2.2136 Model 2. Seven uniform elements Natural frequency 1 = 27.4093 Hz, Error = 0.2827 Natural frequency 2 = 32.1892 Hz, Error = 0.3388 Natural frequency 3 = 39.6128 Hz, Error = 1.1622 Natural frequency 4 = 48.3880 Hz, Error = 2.3740 Natural frequency 5 = 109.0774 Hz, Error = 18.1004 Model 3. Eleven uniform elements Natural frequency 1 = 27.6201 Hz, Error = 0.0719 Natural frequency 2 = 32.4496 Hz, Error = 0.0784 Natural frequency 3 = 40.5212 Hz, Error = 0.2538 Natural frequency 4 = 50.2079 Hz, Error = 0.5541 Natural frequency 5 = 95.7711 Hz, Error = 4.7941 Problem 5.4 The equations of motion for this system are
2 2 2 2
2 2 2 2
0
0
d p uu uv uu uv
d p vu vv vu vv
I I c L c L k L k L
I I c L c L k L k L
+ + + + + =
+ + + + =
These equation are similar to those given in the solution of Problem 3.3, except that the stiffness and damping properties are different to the x and y directions and there is cross coupling between the stiffness and damping in the x and y directions. Thus we have in matrix notation,
2 200 00 0 0
+ + + =
pd uu uv uu uv
d vu vv vu vvp
II c c k kL L
I c c k kI
The stiffness and damping coefficients are based on the hydrodynamic bearing properties. To determine the stiffness and damping of the bearing at 3000 rev/min, from Equation (5.84)
( )( ) ( )
33
2 23
0.1 3000 2 60 0.03 0.0200.0393
8 8 1200 2 0.2 10
bs
D LSfc
= = =
where.
From Equation (5.85), the Somerfeld number, 2
0.3125sb
S DSL
= = .
To determine the eccentricity it is necessary to solve the quartic equation given by Equation (5.83).
( )( ) ( )4 3 2 2 2 2 24 6 0.0400 16 4 0.0400 1 0 + + + = where 2 = . The equation must be solved numerically, and the smallest root is 0.6557 = . Thus
0.8098 = . Using Equation (5.61)
43
( )3 2
22 2521.47N
2 1
br
D Lfc
= =
and
( )3
3 22 2296.76N
8 1
bt
D Lfc
= =
From Equation (5.86) 21tan 0.5691
4
= =
. Hence
( )1tan 0.5726 0.5174rad or 0.5201 180 29.7974 = = = = To determine the stiffness and coefficients for the bearings we must evaluate Equation (5.87). This is a tedious process and the details are not shown. The results are 10348Ns m , 18184 Ns m , 79640 Ns muu uv vu vvc c c c= = = =
5.508MN m , 2.188MN m , 16.323MN m , 28.684 MN m .uu uv vu vvk k k k= = = = Using the data provided and computed, the equations of motion in matrix form when the rotor spins at 3000 rev/min are
=
q , 210 0
Nms0 10
=
M , 0 188.496
Nms188.496 0
=
G ,
40.2587 0.4546 10 Nms0.4546 1.9910
=
C , 61.3770 0.5470
10 N m4.0809 7.1711
=
K
where ( )Mq + G + C q + Kq = 0 . This equation can be transformed into an eigenvalue problem, see section 5.8. The MATLAB script Problem_05_04.m determines the bearing stiffness and damping matrix elements and solves the resultant eigenvalue problem. The output of the script is as follows: Rotor speed = 3000 rev/min: --- Somerfeld number = 0.3125 Eccentricity = 0.80978 Radial force = 521.4747N Tangential force = 296.756N Gamma = 29.6429degrees Roots = (-1605.9467)rad/s and (-563.3804)rad/s Roots = (-40.18492+287.8334i)rad/s and (-40.18492-287.8334i)rad/s Natural freq (Hz) Damped nat freq (Hz) Zeta 46.2544 45.8101 0.13827 46.2544 45.8101 0.13827 Rotor speed = 6000 rev/min: --- Somerfeld number = 0.625 Eccentricity = 0.73606 Radial force = 486.3917N Tangential force = 351.3163N Gamma = 35.8402degrees Roots = (-504.1876+573.1688i)rad/s and (-504.1876-573.1688i)rad/s Roots = (-22.53692+325.6684i)rad/s and (-22.53692-325.6684i)rad/s Natural freq (Hz) Damped nat freq (Hz) Zeta 121.4935 91.2226 0.66048 121.4935 91.2226 0.66048 51.9557 51.8317 0.06904 51.9557 51.8317 0.06904
44
Problem 5.5 Using Equation (5.97), the equations of motion for this system are
00
s
s
mu cu ku k vmv cv k u kv
+ + + =
+ + =
. Let 0stu u e= , etc to give
2
20s
s
ms cs k k
k ms cs k
+ +=
+ +.
Hence (taking square roots) 2 sms cs k jk+ + = . Let s j= (i.e. assuming the real
part of the solution is zero) gives 2 0 + =sk m jc jk . Considering the real and
imaginary parts we have 2 0k m = and 0sk c + = . Thus nk m = = and
s n critc k c= = . Since ( )s m bk D L= and P = then at the critical conditions, ( )s m b crit nk P D L c= = .
Thus ( )( )max crit n m b crit m bP c D L c D L k m= = Given that the power 30000 WP = at a rotor speed of 9600 rev min = , then
9600 2 60 1005.3rad s = = and 29.8416 N mP = = . For this system, 3 = , and the blades are of length 0.05mbL = with a mean diameter of 0.15mmD = . Thus ( ) ( )3 29.8416 0.15 0.05 11937 N ms m bk D L= = = . The rotor is of length 0.3mL = (not 300m as stated in question!) with a diameter
0.015md = carries a central mass (m ) of 3kg . Thus, for the shaft, 4 4 9 464 0.015 64 2.4850 10 mI d = = = .
Since 112 10 PaE = , at the mid-span of the shaft, 3 11 9 348 48 2 10 2.4850 10 0.3 883570 N mk EI L = = = . Thus we have
883570 3 542.7 rad sn k m = = = and hence 21.9948 Ns mcrit s nc k= = These calculations are repeated in the MATLAB script Problem_05_05.m. In order to determine the system properties for various values of damping, it is necessary to solve an eigenvalue problem derived from the system equations. The eigenvalue problem is solved in the MATLAB script Problem_05_05.m. From the roots s, we have ( )imag 2d s = , 2n s = and ( )real s s = . To determine the direction of the orbit we must compute This is done in Problem_05_05.m using the MATLAB function whirl.m which is provided in the Rotordynamics software package. The output from the script is k_sw = 11936.6207 N/m Critical damping = 21.9948 Ns/m Damping (Ns/m) Damped freq (Hz) Nat freq (Hz) zeta kappa 0 86.3755 86.3775 0.006754 -1 0 86.3755 86.3775 -0.006754 1 20 86.3739 86.3739 -0.000613 1 20 86.3739 86.3811 0.012896 -1 40 86.3690 86.3703 0.005529 1 40 86.3690 86.3846 0.019037 -1
45
Note that (i) the value of 1 = implying that the forward or backward whirl orbit is circular, (2) that when 0c = and 20 Ns mc = one value of is negative, i.e. the system is unstable, as we expect, since the critical damping is 21.995 Ns m . Problem 5.6 We now introduce an error into Equation (5.97), the equations of motion for this system by changing the sign of sk . Thus we have
00
+ + =
+ + + =
s
s
mu cu ku k vmv cv k u kv
. Let 0stu u e= , etc to give
2
20
+ + =
+ +s
s
ms cs k k
k ms cs k.
Hence (taking square roots) 2 sms cs k jk+ + = . Let s j= (i.e. assuming the real
part of the solution is zero) gives 2 0 + =sk m jc jk . Considering the real and
imaginary parts we have 2 0k m = and 0sk c + = . Note that these equations are identical to those of Problem 5.5, so the frequencies computed will be identical to
those of Problem 5.5. However, where as 2
0
0 s
u ms cs kv k
+ += in the correctly
formulated analysis, 2
0
0 s
u ms cs kv k
+ +=
in the incorrectly formulate analysis. Thus the
sign of 0 0u v will be reversed in the incorrect formulation. So if 0 0u v is positive the incorrect formulation will be negative and vice-versa. The direction of whirl will be reversed and in error. Problem 5.7 From Equation (5.96)
0 0
0 0
21 10 4 2
21 102 4
00
00
d d d
d d d
d d d
d d d
m m c c mu um m m c cv v
k k m c uvc k k m
+ + + + +
+ + = +
Let 0 dm m m= + , 0= + dk k k , 0= + dc c c and 0stu u e= , etc. Hence,
( )( )
2 21 14 2
2 21 12 4
0d d d
d d d
ms cs k m c m s
c m s ms cs k m
+ + + =
+ + +
To determine the stability boundary, the real part of the solution is zero, and hence we let s j= . Under these conditions, c and c (where subscript c implies the critical value at the boundary of stability. Thus
( )( )
2 21 14 2
2 21 12 4
0 + + +
= + + +
c c d c d c d c
d c d c c c d c
m j c k m c j m
c j m m j c k m. Thus
( ) ( )2 22 2 21 14 2 0 + + + + =c c d c d c d cm j c k m c j m
46
( )2 21 14 2 + + = + c c d c d c d cm j c k m j c j m . Hence ( )2 214 + = c d c c d cm k m m and 12 = c d cc c
Taking the positive sign in the imaginary equation, the limit of stability is when ( )2 2 = = c c d cc c r where dr c c= . Substituting this value of c into the real
part of the equation (and taking the positive sign) gives
( ) ( )2 2 2142 2 2 + = c d c d cm r k m r rm and hence 22 2 =
+ c
d d
kmr m m r
.
Note that when 0 0c = , ( )0 1d dr c c c= + = .
Thus 2 = c c and 0
2 2 = =c d
k km m m
Note also that as 0c , 0r and then 2 =cd
km
and 0 =c .
For the shaft, 4 7 464 3.068 10 mI d = = . The shaft stiffness at the centre is (see
Appendix 2, Table A2.1, system 1) is 3 70 48 1.3635 10 N mk EI L= = . 7 7 71.3635 10 2 10 3.3635 10 N mk = + = . 0 600kgm = , 120kgdm = ,
200 Ns mdc = and 20 kN mdk = ,
For 0 0c = , 7
0
3.3635 102 2 473.53rad s 4521.9 rev min600
= = = c
km
and
2 473.53 2 236.76 rad s 37.68Hz = = = c c . The critical speed and frequency can be easily calculated for other system damping. However, MATLAB script Problem_05_07.m calculates these speeds and frequencies (see output below) and also plots various parameters against rotor speed for a system damping of 0 160 Ns mc = . System damping c0 = 0. Conditions at limit of stability Shaft speed = 4521.9312 rev/min Whirl frequency = 37.6828 Hz System damping c0 = 80 Ns/m. Conditions at limit of stability Shaft speed = 6231.7804 rev/min Whirl frequency = 37.0939 Hz System damping c0 = 160 Ns/m. Conditions at limit of stability Shaft speed = 7663.7602 rev/min Whirl frequency = 35.4804 Hz System damping c0 tend to infinity. Conditions at limit of stability Shaft speed = 10111.3456 rev/min Whirl frequency = 0 Hz
47
Problem 5.8 This problem involves finite element analysis (FEA) and can only be solved using appropriate FEA software. Case 1. When the bearings are rigid, the bearings act in their nominal position, i.e. 0.1m from end of the shaft. There is no axial tension in the shaft. Case 2. When contact angle is 20 the point of contact of the bearing on the shaft is shifted by
( )0.035tan 20 0.0127m = = so that the bearings are now 0.0873m from the ends of the shaft.. A tensile force of 500N acts on the shaft. Case 3. If 0.0127m = a tensile force on the shaft can be applied to the shaft which will negate the effect of t
Top Related