







Languages
Pages
Legal

BAB 7
DINAMIKA PENGEMUDIAN
7.1 Kinematika Pengemudian
Kendaraan
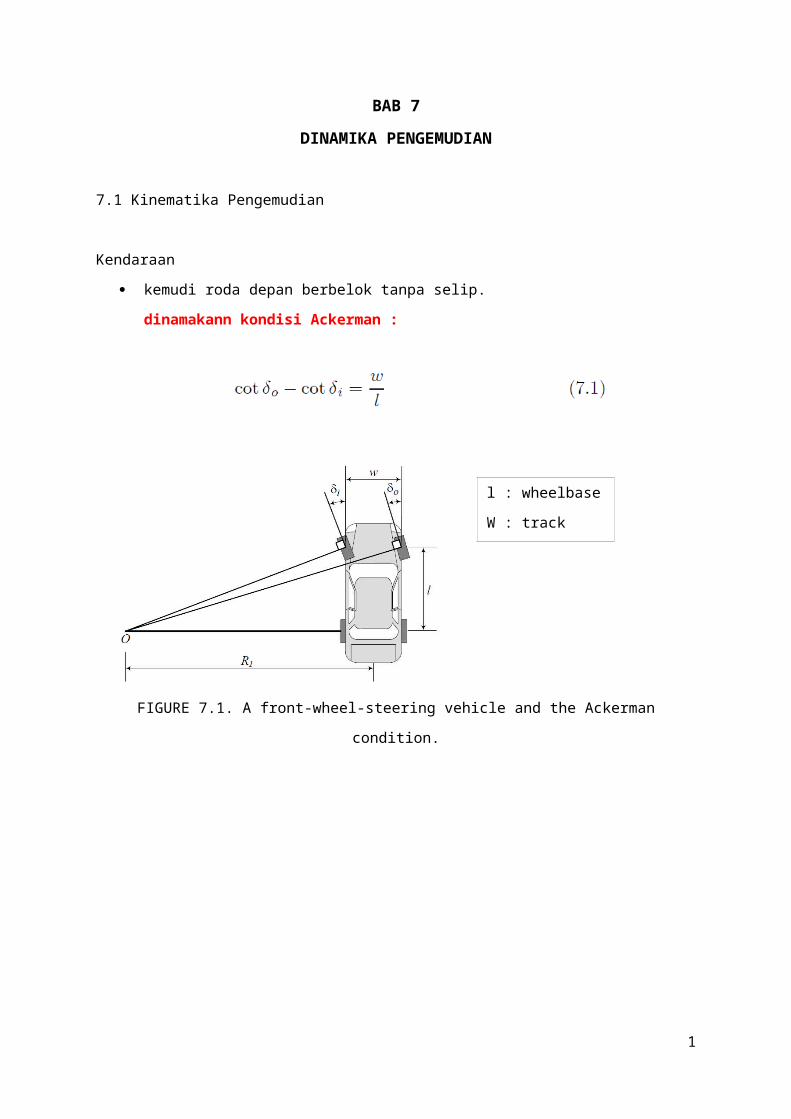
kemudi roda depan berbelok tanpa selip.
dinamakann kondisi Ackerman :
FIGURE 7.1. A front-wheel-steering vehicle and the Ackerman condition.
FIGURE 7.2. A front-wheel-steering vehicle and steer angles of the inner and outer wheels.
1
l : wheelbase
W : track
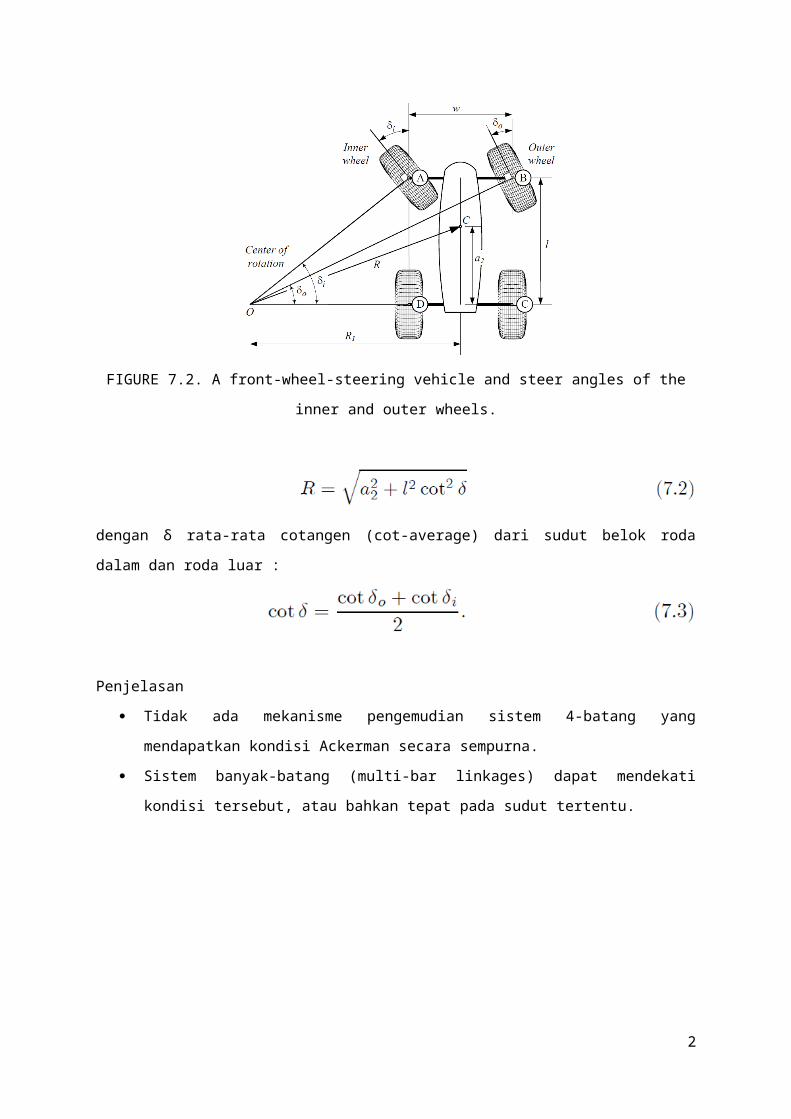
dengan δ rata-rata cotangen (cot-average) dari sudut belok roda dalam dan roda luar :
Penjelasan
Tidak ada mekanisme pengemudian sistem 4-batang yang mendapatkan kondisi
Ackerman secara sempurna.
Sistem banyak-batang (multi-bar linkages) dapat mendekati kondisi tersebut, atau
bahkan tepat pada sudut tertentu.
FIGURE 7.3. Equivalent bicycle model for a front-wheel-steering vehicle.
2

FIGURE 7.4. Effect of w/l on the Ackerman condition for front-wheel-steering
vehicles.
(ralat : sb horosontal : δi ; sb vertikal δo)
Contoh 259 Kebutuhan ruangan (space).
Lihat Gambar 7.5.
FIGURE 7.5. The required space for a turning two-axle vehicle.
3

dan diperoleh :
wv > w (7.22)
FIGURE 7.6. A trapezoidal steering mechanism.
Contoh 260 Mekanisme pengemudian trapezoidal.
Lihat Gambar 7.6
mengilustrasikan suatu hubungan 4-batang simetris, yang dinamakan mekanisme
pengemudian trapezoidal, yang telah diterapkan selama lebih dari 100 tahun.
mekanisme tersebut memiliki dua parameter watak (karakteristik), yaitu sudut β dan
panjang lengan samping (offset arm length), d.
Posisi belok mekanisme trapesoidal diperlihatkan pada gambar 7.7, untuk
menunjukkan sudut belok dalam dan luar δi dan δo.
Hubungan antara sudut belok dalam dan luar pada mekanisme tersebut adalah :
4
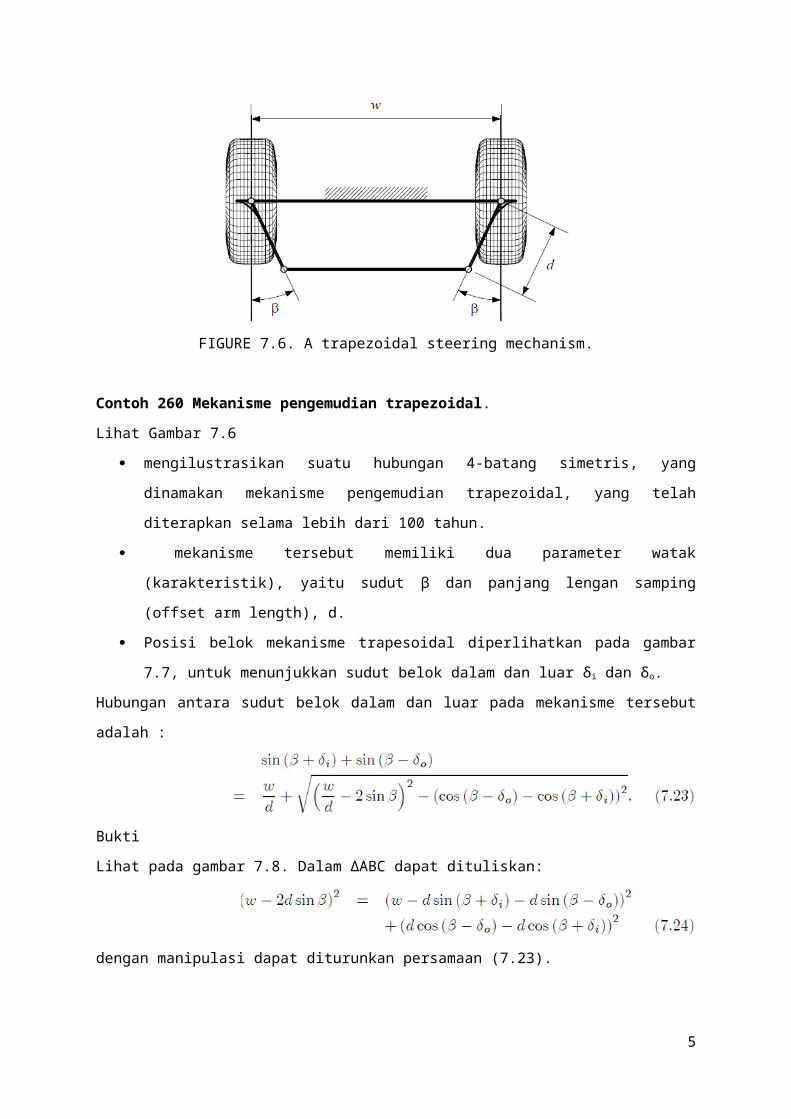
Bukti
Lihat pada gambar 7.8. Dalam ΔABC dapat dituliskan:
dengan manipulasi dapat diturunkan persamaan (7.23).
FIGURE 7.7. Steered configuration of a trapezoidal steering mechanism.
FIGURE 7.8. Trapezoidal steering triangle ABC.
5
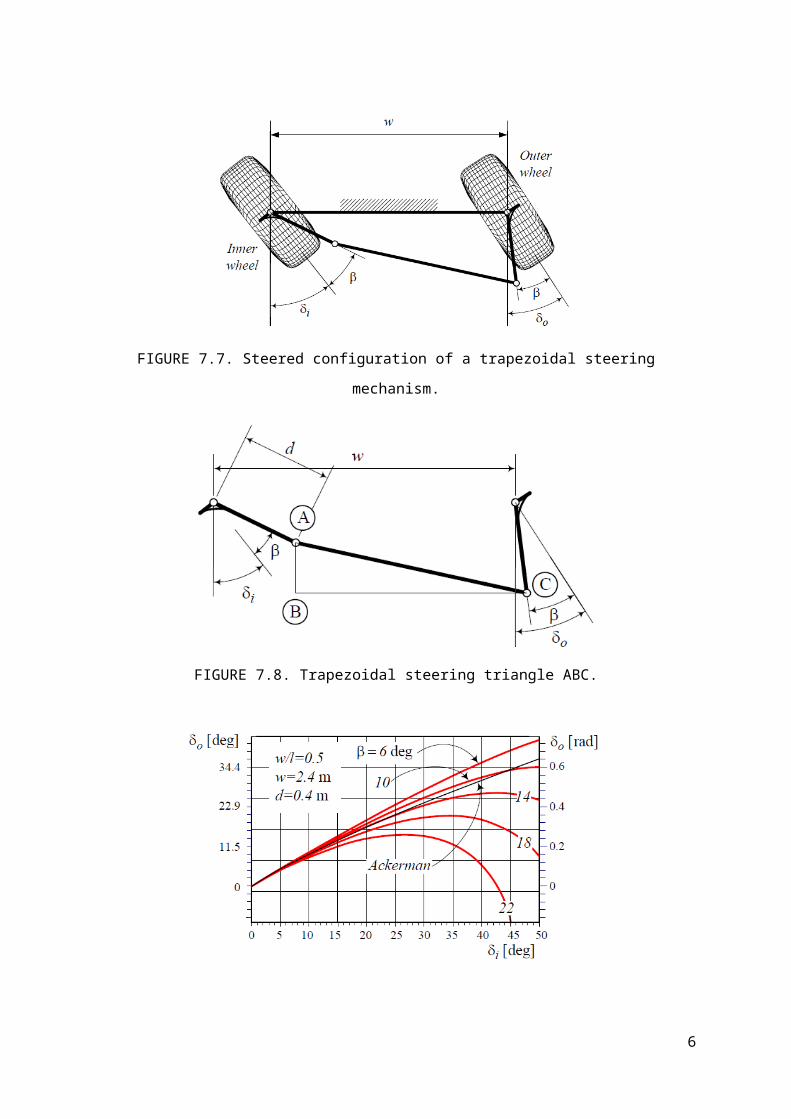
FIGURE 7.9. Behavior of a trapezoidal steering mechanism, compared to the
Untuk menguji mekanisme kemudi trapesoidal dibandingkan dengan kondisi Ackerman,
didefinisikan prameter kesalahan e = δDo −δAo.
FIGURE 7.10. The error parameter e = δDo − δAo for a sample trapezoidal steering
mechanism.
Contoh 261 Sumbu belakang terkunci
Desain sederhana
biasanya digunakan pada kereta mainan, kendaraan off-road kecil semisal mini Baja.
Dari gambar 7.2.
dan kecepatan roda belakang luar adalah :
6

ωri = ωro = ω (7.28)
namun demikian
yang menunjukkan bahwa tidak mungkin sumbu terkunci bila w tidak sama dengan nol.
FIGURE 7.11. A rear-wheel-steering vehicle.
Contoh 262 Kemudi-roda-belakang
digunakan bila diperlukan kemampuan manuver yang tinggi pada kendaraan
kecepatan rendah, seperti misalnya forklift.
tidak digunakan pada kendaraan jalan raya, karena tidak stabil pada kecepatan
tinggi.
Pusat rotasi pada kendaraan kemudi-roda-belakang selalu terletak pada titik yang
segaris dengan sumbu depan.
Contoh 263 Persamaan sudut belok kinematis alternatif
Bila kecepatan anguler roda dalam dan luar masing-masing ωi dan ωo, sudut belok
kinematis roda depan diungkapkan sebagai :
7

FIGURE 7.12. Kinematic condition of a F W S vehicle using the angular velocity of the inner
and outer wheels.
FIGURE 7.13. Kinematic steering condition for a vehicle with different tracks in the front and
in the back.
8
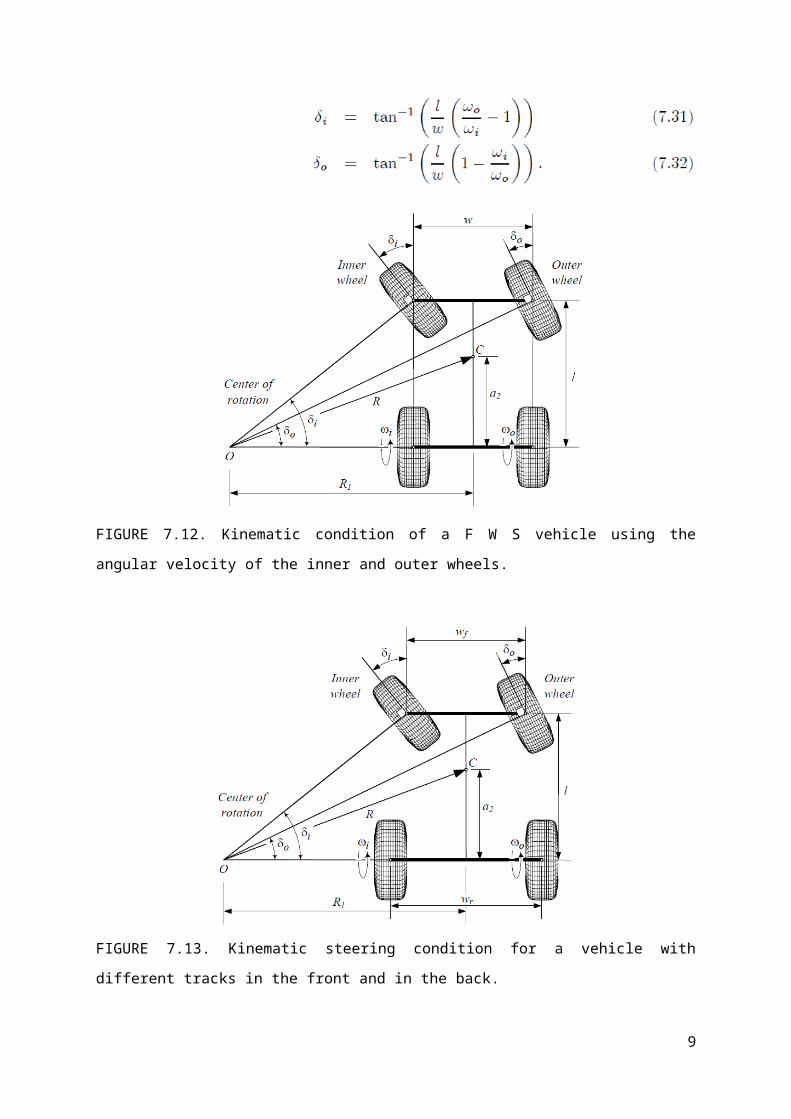
Contoh 264 Track depan dan belakang yang tidak sama
diilustrasikan pada gambar 7.13.
Kecepatan anguler kendararan :
(ralat : mestinya
dan sudut belok kinematis roda depan :
wf adalah track depan, wr track belakang, dan Rw adalah radius roda.
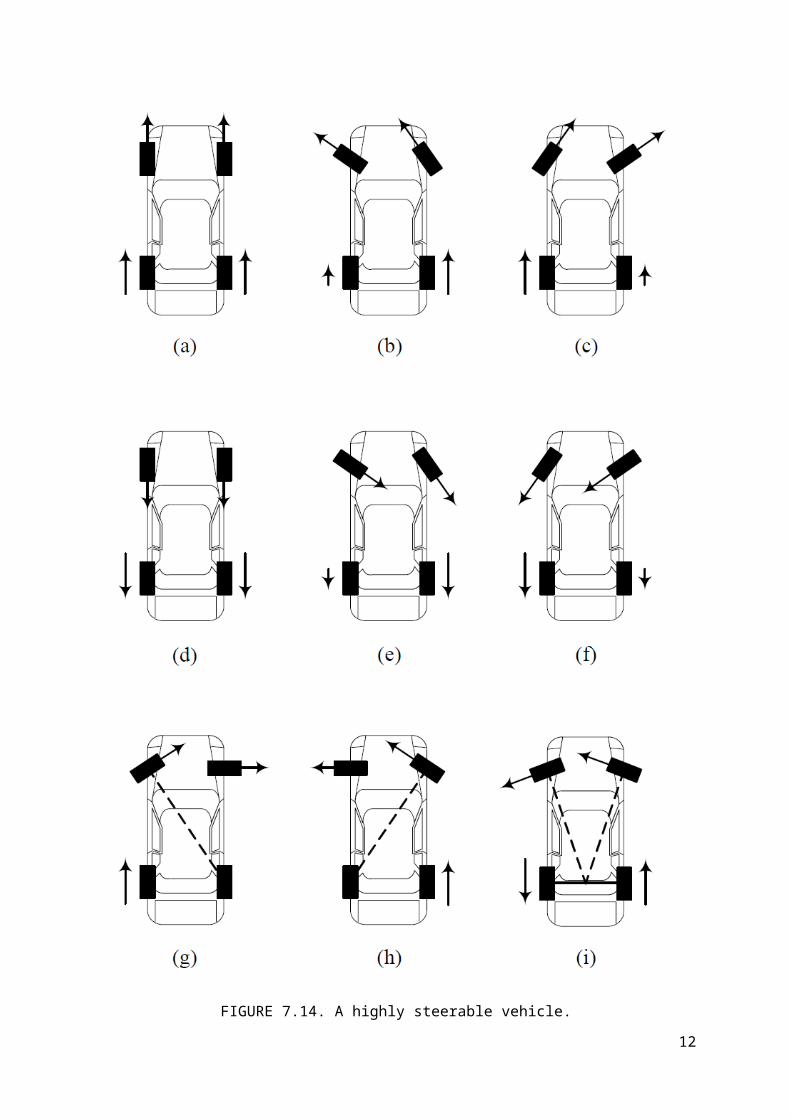
Contoh 265. Penggerak-roda belakang independen
Lihat gambar Gambar 7.14
digunakan pada kendaraan keperluan khusus, seperti misalnya penjelajah bulan,
dan autonomous mobile robots,
masing-masing roda penggerak mungkin disambungkan dengan motor yang
dikontrol secara independen
mampu berbelok lebih dari 90 0 ke kiri atau ke kanan.
Pada sebarang skenario di atas, sudut belok roda depan hendaknya dicari dengan
persamaan yang sesuai, misalnya persamaan (7.40) dan (7.41). Rasio antara
kecepatan anguler roda gerak luar dengan roda gerak dalam ωo/ωi, dapat ditentukan
dengan menggunakan sudut belok luar atau dalam
9

FIGURE 7.14. A highly steerable vehicle.
10

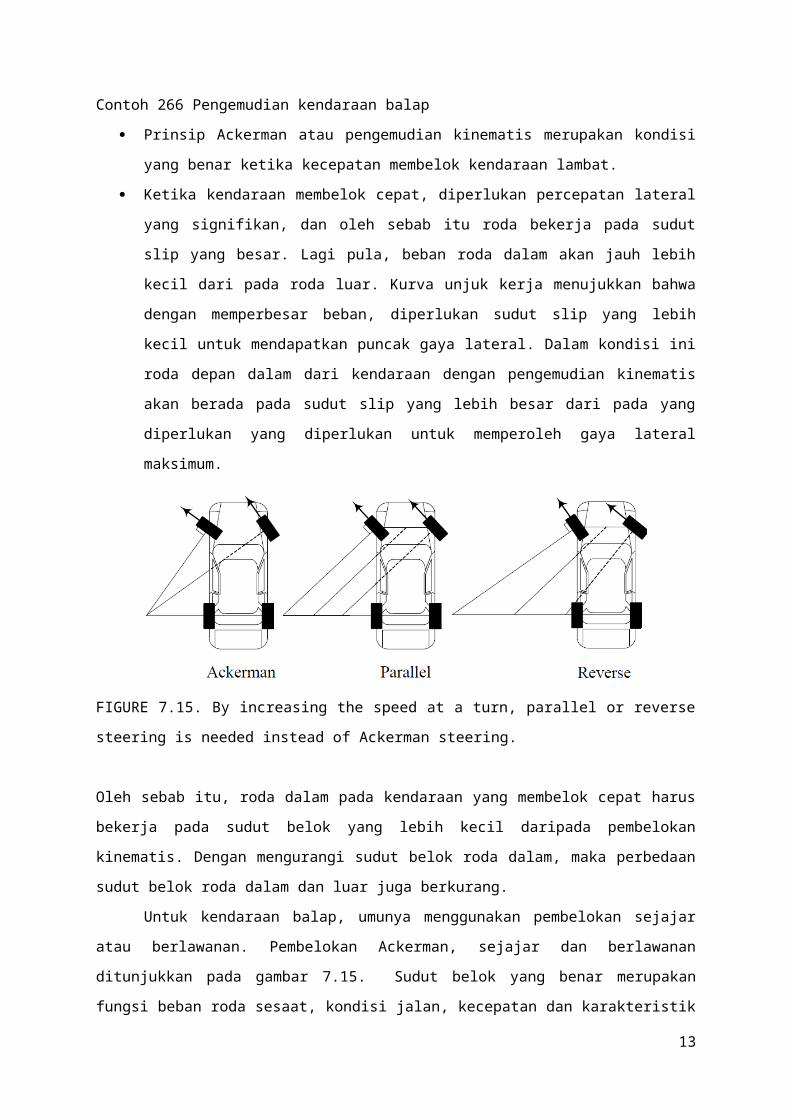
Contoh 266 Pengemudian kendaraan balap
Prinsip Ackerman atau pengemudian kinematis merupakan kondisi yang benar ketika
kecepatan membelok kendaraan lambat.
Ketika kendaraan membelok cepat, diperlukan percepatan lateral yang signifikan,
dan oleh sebab itu roda bekerja pada sudut slip yang besar. Lagi pula, beban roda
dalam akan jauh lebih kecil dari pada roda luar. Kurva unjuk kerja menujukkan
bahwa dengan memperbesar beban, diperlukan sudut slip yang lebih kecil untuk
mendapatkan puncak gaya lateral. Dalam kondisi ini roda depan dalam dari
kendaraan dengan pengemudian kinematis akan berada pada sudut slip yang lebih
besar dari pada yang diperlukan yang diperlukan untuk memperoleh gaya lateral
maksimum.
FIGURE 7.15. By increasing the speed at a turn, parallel or reverse steering is needed
instead of Ackerman steering.
Oleh sebab itu, roda dalam pada kendaraan yang membelok cepat harus bekerja pada
sudut belok yang lebih kecil daripada pembelokan kinematis. Dengan mengurangi sudut
belok roda dalam, maka perbedaan sudut belok roda dalam dan luar juga berkurang.
Untuk kendaraan balap, umunya menggunakan pembelokan sejajar atau
berlawanan. Pembelokan Ackerman, sejajar dan berlawanan ditunjukkan pada gambar 7.15.
Sudut belok yang benar merupakan fungsi beban roda sesaat, kondisi jalan, kecepatan dan
karakteristik ban. Lagi pula, kendaraan harus mampu membelok pada kecepatan rendah,
pada kondisi belok Ackerman. Sedangkan tidak ada mekanisme kemudi ideal tanpa
pengaturan sudut belok pada setiap roda kemudi secara independen dengan menggunakan
sistem yang smart.
Contoh 268 Sejarah adanya kondisi Ackerman
11
Geometri mengemudi yang benar merupakan persoalan utama pada kereta kuda, dan
kendaraan jaman dulu. Kereta dan alat angkut beroda-enam atau empat selalu
meninggalkan goresan karet di belakangnya. Itulah sebabnya banyak kereta dan alat angkut
yang beroda tiga di jaman dulu. Persoalannya adalah bagaimana membuat suatu
mekanisme agar roda dalam membelok dengan radius yang lebih kecil bila dibandingkan
dengan roda luar ketika kendaraan berjalan dengan lintasan melingkar. Kondisi geometris
yang dibutuhkan pada alat angkut roda empat dengan kemudi-roda-depan diperkenalkan
pada tahun 1816 oleh George Langensperger di Munich, Jerman. Mekanisme
Langensperger ditunjukkan pada gambar 7.16.
FIGURE 7.16. Langensperger invention for the steering geometry condition.
Rudolf Ackerman bertemu Langensperger dan melihat penemuannya. Ackerman
mendaftarkan patent Langensperger di London dan memperkenalkan penemuannya kepada
pembuat alat angkut di Inggris. Pabrik pembuat kereta telah mengadopsi dan
menyempurnakan geometri Ackerman bagi mekanisme kemudinya sejak tahun 1881.
Desain dasar sistem kemudi kendaraan hanya sedikit berubah sejak penemuan
mekanisme kemudi tersebut. Input dari pengemudi di teruskan dengan poros lewat
mekanisme reduksi roda-gigi untuk membangkitkan gerakan kemudi pada roda depan.
12
7.2 Kendaraan dengan lebih dari dua sumbu
Bila suatu kendaraan memiliki lebih dari dua sumbu, maka semua sumbu, kecuali satu,
harus dapat dikemudikan, agar dapat membelok tanpa-slip pada kecepatan nol. Ketika
suakendaraan dengan n-sumbu, ada n-1 kondisi kemudi geometris. Suatu kendaraan
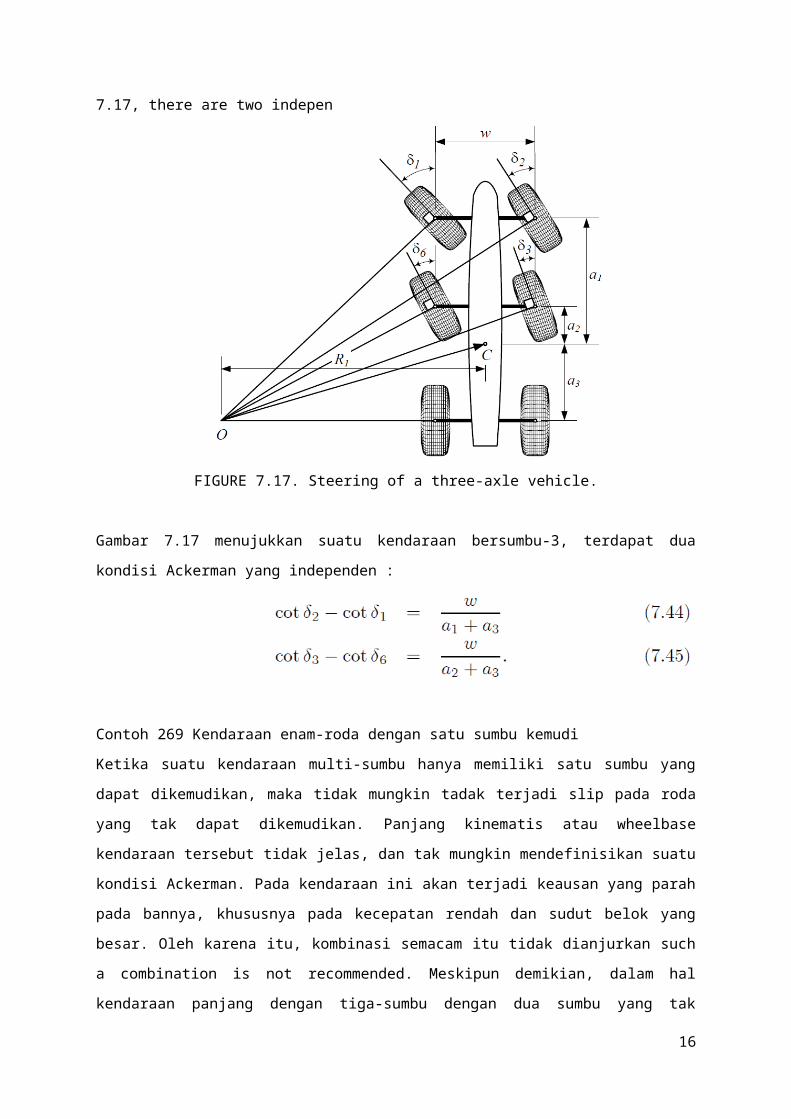
dengan dua sumbu yang dapat dikemudikan diperlihatkan pada gambar 7.17. Untuk
mengindikasikan geometri kendaraan multi-sumbu, dimulai dari sumbu depan dan dihitung
jarak longitudinal, ai, antara sumbu i dengan pusat massa C. Dengan demikian, untuk
kendaraan tersebut, a1 adalah jarak antara sumbu depan dengan C, dan a2 adalah jarak
antara sumbu ke-2 dengan C. Lebih lanjut, nomor roda dihitung dalam arah jarum jam, dari
roda penggerak untuk nomor 1. Untuk kendaraan bersumbu-3 diperlihatkan pada gambar
7.17, there are two indepen
FIGURE 7.17. Steering of a three-axle vehicle.
Gambar 7.17 menujukkan suatu kendaraan bersumbu-3, terdapat dua kondisi Ackerman
yang independen :
Contoh 269 Kendaraan enam-roda dengan satu sumbu kemudi
13

Ketika suatu kendaraan multi-sumbu hanya memiliki satu sumbu yang dapat dikemudikan,
maka tidak mungkin tadak terjadi slip pada roda yang tak dapat dikemudikan. Panjang
kinematis atau wheelbase kendaraan tersebut tidak jelas, dan tak mungkin mendefinisikan
suatu kondisi Ackerman. Pada kendaraan ini akan terjadi keausan yang parah pada bannya,
khususnya pada kecepatan rendah dan sudut belok yang besar. Oleh karena itu, kombinasi
semacam itu tidak dianjurkan such a combination is not recommended. Meskipun demikian,
dalam hal kendaraan panjang dengan tiga-sumbu dengan dua sumbu yang tak dikemudikan
saling berdekatan, dapat dilakukan analisis pendekatan pada kecepatan rendah. Gambar
7.18 mengilustrasikan kendaraan enam-roda dengan hanya satu sumbu kemudi di depan.
Mekanisme kemudi didesain sedemikian sehingga pusat rotasi O terletak di garis latelal
(menyamping), yang dinamakan garis tengah (midline), di antara kedua sumbu belakang.
Panjang kinematis kendaraan, l, adalah jarak antara sumbu depan dengan garis tengah
(midline). Untuk perancangan ini berlaku :
FIGURE 7.18. A six-wheel vehicle with one steerable axle in front.
dan
14
Pusat sumbu depan dan pusat massa kendaraan berputar terhadap O dengan radius Rf dan
R, masing-masing :
Bila radius rotasi sangat besar bila dibandingkan dengan wheelbase, maka persamaan
(7.48) dan (7.49) dapat didekati dengan :
FIGURE 7.19. A self-steering axle mechanism for locomotive wagons.
Untuk menghindari terjadinya keausan yang parah, salah satu sumbu hendaknya
memungkinkan dapat diangkat ketika beban tidak terlalu berat. Untuk kendaraan semacam
ini, dapat didesain mekanisme kemudi mengikuti kondisi Ackerman, berbasis wheelbase
untuk kendaraan dengan sumbu yang tak dapat diangkat. Namun demikian, bila kendaraan
ini membawa muatan yang berat dan semua sumbu digunakan, sumbu yang dapat diangkat
tersebut akan mengalami keausan parah, pada sudut belok besar.
15
Pilihan lain bagi kendaraan multi-sumbu adalah dengan menggunakan roda kemudi-
sendiri (self-steering wheels). yang mampu menyesuaikan sendiri untuk meminimalkan
gesekan samping (sideslip). Roda semacam itu tak mampu memberikal, dan dengan begitu,
tak mampu banyak membantu dalam manuver. Roda kemudi-sendiri digunakan pada buggie
and trailer. Mekanisme sumbu kemudi-sendiri untuk kendaraan lokomotif diperlihatkan pada
gambar 7.19.
7.3 Kendaraan dengan Trailer
Bila kendaraan roda-4 dipasang suatu trailer dengan satu sumbu, dapat diturunkan
kondisi kinematis untuk kondisi kemudi tanpa-slipI. Gambar 7.20 mengillustrasikan suatu
kendaraan dengan traler satu-sumbu. Pusat massa kendaraan akan memutar dengan radius
R, sedangkan trailer memutar dengan radius Rt.
Pada kondisi steady-state, sudut antara trailer dan kendaraan adalah :
16
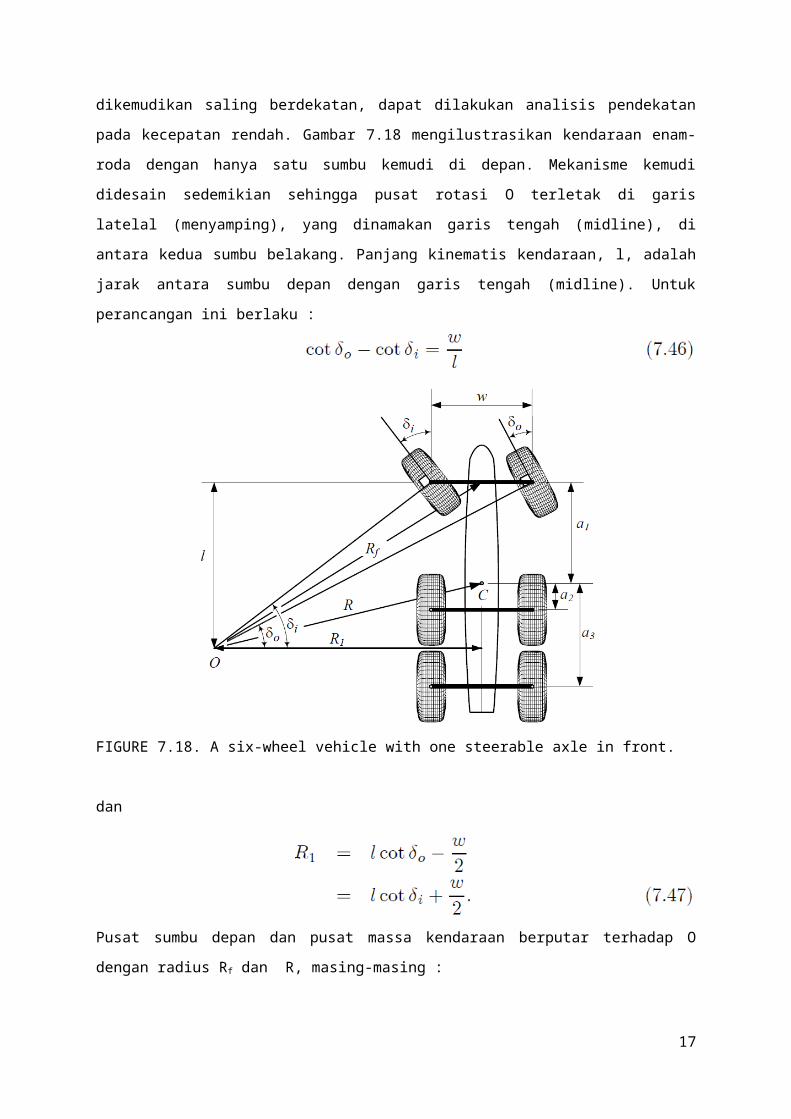
FIGURE 7.20. A vehicle with a one-axle trailer.
Bukti. Dengan memperhatikan segi-3 ΔOAB pada gambar 7.20, radius rotasi trailer Rt dapat
dituliskan sebagai :
Karena panjang OB adalah :
Dengan mensubstitusikan R1 dari persamaan (7.6) ternyata bahwa hubungan antara radius
rotasi trailer dengan geometri kendaraan adalah :
17
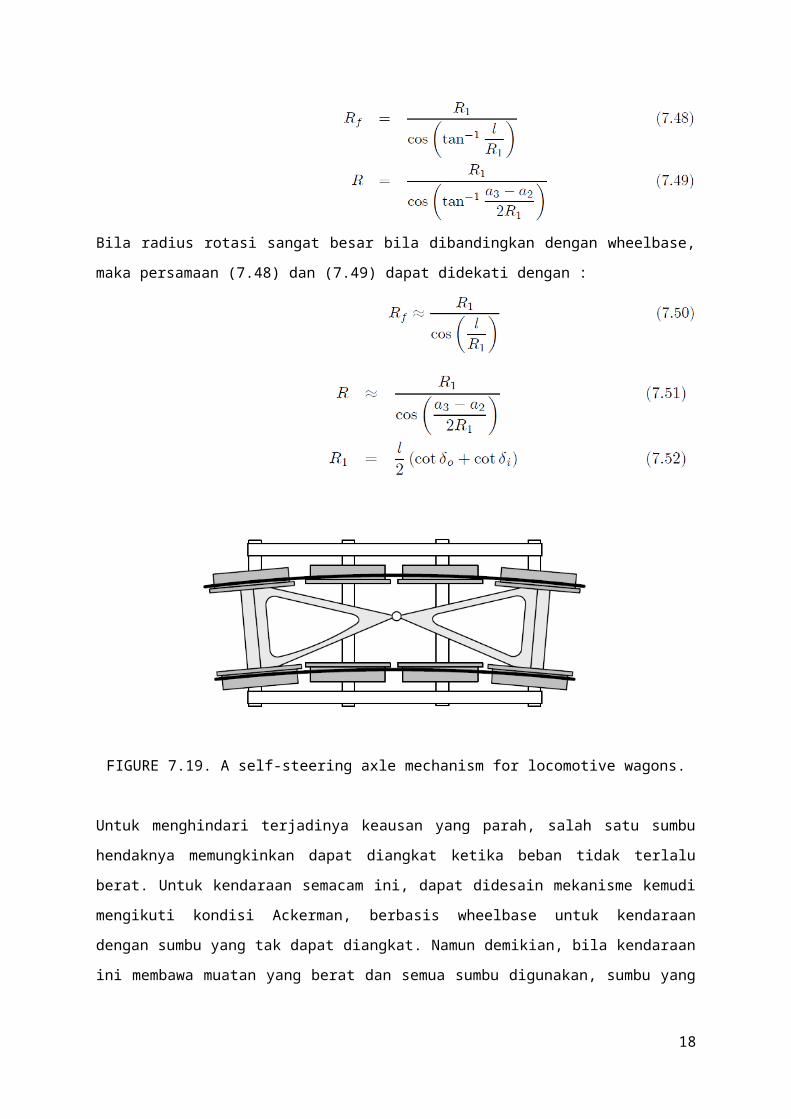
FIGURE 7.21. Two possible angle θ for a set of (Rt, b1, b2).
Dengan menggunakan persamaan
Rt sin θ = b1 + b2 cos θ (7.61)
dan dengan menggunakan trigonometri, dapat dihitung sudut θ, antara trailer dengan
kendaraan seperti pada persamaan (7.55).
Tanda minus pada persamaan (7.55), yaitu pada , dalam hal b1 – b2
≠ 0, adalah digunakan untuk gerakan maju, sedangkan tanda plus adalah solusi untuk
gerakan mundur. Kedua kemungkinan konfigurasi θ pada suatu pasangan (Rt, b1, b2)
ditunjukkan pada gambar 7.21. θ2 dinamakan konfigurasi jackknifing.
Contoh 270 Dua kemungkinan sudut trailer-kendaraan.
Misalkan suatu kendaraan empat-roda yang menarik tariler sumbu-tunggal d:
l = 103.1 in ≈ 2.619m
w = 61.6 in ≈ 1.565m
b1 = 24in≈ 0.61m
b2 = 90in≈ 2.286m
δi = 12deg≈ 0.209 rad (7.62)
Karakteristik pengemudian kinematis kendaraan adalah :
18

Contoh 271 Kebutuhan ruangan.
Kondisi pengemudian kinematis kendaraan dengan trailer dapat digunakan untuk
menghitung kebutuhan ruangan ketika membelok.
Misalkan roda depan dari kendaraan dua-sumbu yang dipasangi trailer dikemudikan sesuai
dengan geometri Ackerman, seperti terlihat pada gambar 7.22. Titik luar roda depan akan
berjalan dengan radius maksimum RMax, sedangkan suatu titik di sisi dalam roda belakang
trailer akan berjalan dengan radius minimum Rmin. Radius maksimum RMax adalah :
Dengan :
dan lebar kendaraan ditunjukkan dengan wv.
Ruangan yang dibutuhkan untuk membelok kendaraan dan trailer adalah cicincin denagn
lebar 4R, yang merupakan fungsi geometri kendaraan dan trailer.
4R = RMax − Rmin (7.71)
19
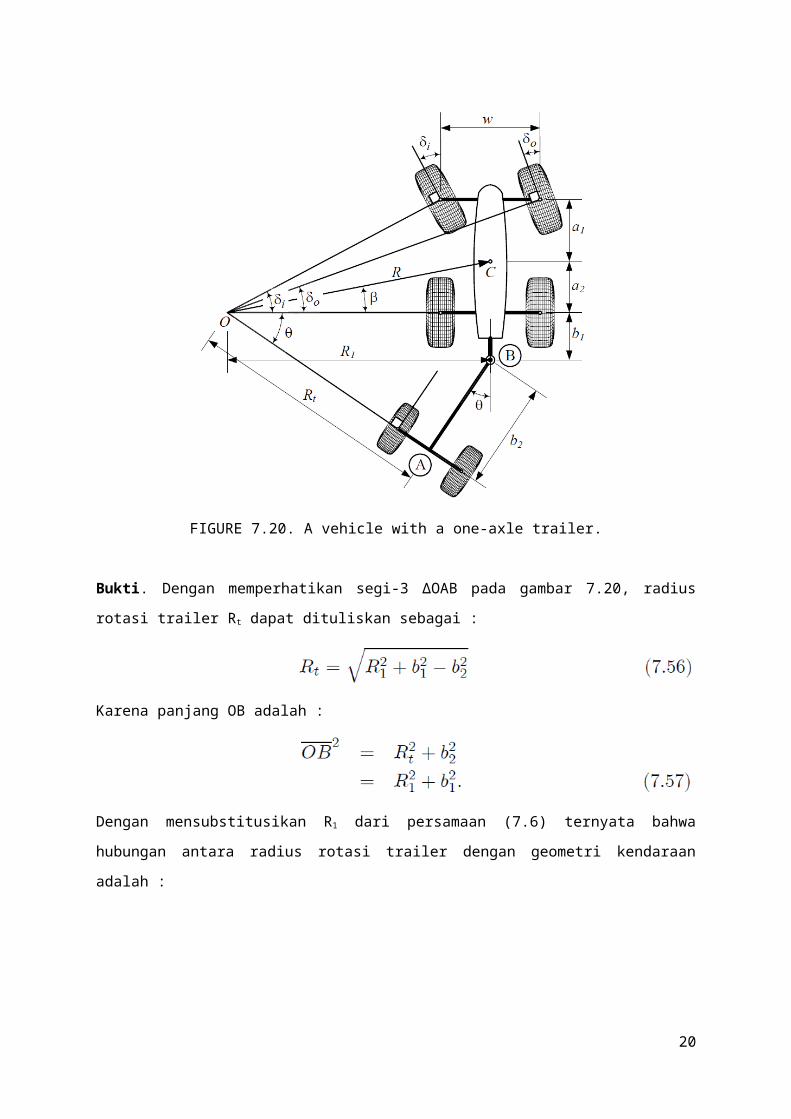
FIGURE 7.22. A two-axle vehicle with a trailer is steered according to the Ackerman
condition.
Kebutuhan ruangan 4R dapat dihitung berdasarkan sudut belok dengan mensubstitusi Rmin
7.4 Mekanisme Pengemudian
Suatu sistem pengemudian dimulai dari roda stir atau handel stir. Pengemudi memberikan
input kemudi yang diteruskan dengan poros ke sistem reduksi roda gigi, biasanya rack-and-
pinion atau recirculating ball bearings. Output roda gigi kemudi diteruskan ke roda kemudi
untuk menghasilkan gerakan melalui mekanisme kemudi. Tuas, yang meneruskan gaya
kemudi dari roda-gigi kemudi ke rangkaian kemudi (steering linkage), dinamakan lengan
Pitman.
20

Arah tiap roda dikendalikan dengan lengan kemudi. Lengan kemudi dihubungkan
dengan roda kemudi dengan pasak, pengunci dan hub. Pada beberapa kendaraan, hub dan
ruas kemudi (steering knuckle) merupakan satu kesatuan.
Untuk memperoleh kemampuan manuver yang tinggi, suatu sistem kemudi harus
dapat memperoleh sudut belok roda depan minimum kira-kira 350, pada kendaraan
penumpang.
Suatu contoh mekanisme kemudi jajaran-genjang dan komponen-komponennya
diperlihatkan pada gambar 7.23. Linkage kemudi jajaran ganjang umum digunakan pada
kendaraan roda depan independen. Ada banyak macam mekanisme kemudi dengan
keunggulan dan kekurangannya masing-masing.
Contoh 272 Rasio kemudi.
Rasio kemudi adalah sudut rotasi handel kemudi dibagi dengan sudut belok roda kemudi.
Rasio kemudi kendaraan jalan raya berkisar antara 5 : 1 hingga 20 : 1. Rasio kemudi pada
kemudi Ackerman berbeda antara roda dalam dan roda luar. Lagi pula rasio tersebut
memiliki watak tidak linier dan sebagai fungsi sudut roda.
Contoh 273 Kemudi batang-dan-roda-gigi (Rack-and-pinion steering).
Batang-dan-roda-gigi adalah sistem yang paling umum pada kendaraan penumpang.
Gambar 7.24 mengilustrasikan suatu contoh sistem batang-dan-roda-gigi. Batang-gigi dapat
di depan atau di belakang sumbu kemudi. Putaran dari handel kemudi δS diteruskan oleh
kotak kemudi menjadi gerakan translasi batang gigi uR = uR (δS), dan kemudian oleh drag
links ke roda kemudi menjadi δi = δi (uR),δo = δo (uR). Drag link disebut juga tie rod.
Rasio kemudi secara menyeluruh tergantung pada rasio kotak kemudi dan pada kinematika
linkage kemudi.
FIGURE 7.23. A sample parallelogram steering linkage and its components.
21

FIGURE 7.24. A rack-and-pinion steering system.
Contoh 274. Sistem kemudi lengan tuas
Gambar 7.25 mengilustrasikan suatu linkage kemudi yang kadang-kadang dinamakan
sistem kemudi lengan tuas. Dengan menggunakan sistem kemudi lengan tuas,
memungkinkan untuk mendapatkan sudut belok yang lebih besar. Sistem kemudi ini
digunakan pada truk dengan wheel base yang besar dan suspensi roda independen pada
poros depan. Kotak kemudi dan segi-3 dapat juga dipasang di luar pusat sumbu.
FIGURE 7.25. A lever arm steering system.
Example 275 Sistem kemudi drag link
Ada kalanya akan lebih baik mengirimkan perintah kemudi hanya ke satu roda dan
menghubungkannya ke roda lainnya dengan drag link, seperti terlihat pada gambar 7.26.
Linkage kemudi semacam ini biasanya digunakan pada truk dan bus dengan sumbu depan
yang solid. Gerakan rotasi handel kemudi diubah oleh kotak kemudi menjadi gerak rotasi
lengan kemudi, kemudian ke gerak rotasi roda kiri. Suatu drag link meneruskan gerak rotasi
roda kiri ke gerak rotasi roda kanan.
22
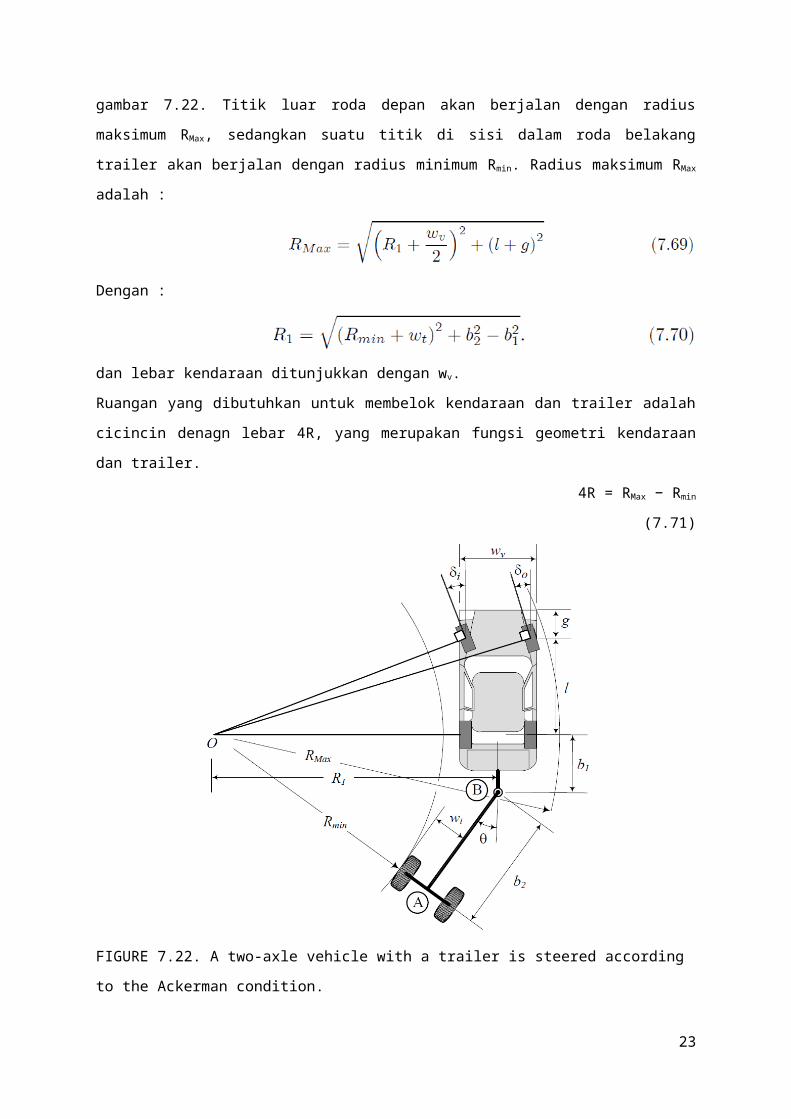
FIGURE 7.26. A drag link steering system.
Gambar 7.27 menunjukkan cuatu contoh menghubungkan mekanisme kemudi ke
lengan Pitman arm roda kiri dengan menggunakan suatu linkage tarapesoidal, gna
menghubungkan roda kanan dengan roda kiri.
FIGURE 7.27. Connection of the Pitman arm to a trapezoidal steering mechanism.
Contoh 276 Mekanisme kemudi link-banyak.
Pada bus dan trukyang besar, pengemudi mungkin duduk lebih dari 2 m di depan sumbu
depan. Kendaraan semacam ini membutuhkan sudut belok yang besar pada roda
depanagar dapat bermanuver dengan baik. Dengan demikian diperlukan mekanisme kemudi
link-banyak yang lebih rumit. Suatu contoh mekanisme kemudi link-banyak diperlihatkan
pada gambar 7.28.
Gerakan rotasi handel kemudi diteruskan oleh kotak kemudi ke lengan tuas kemudi.
Lengan tuas dihubungkan dengan linkage penerus, yang memutar roda kiri dan kanan
dengan batang ban panjang (long tire rod).
23
FIGURE 7.28. A multi-link steering mechanism.
Contoh 277 Efisiensi balik.
Kemampuan mekanisme kemudi untuk mengumpan balik input dari jalan ke pengemudi
dinamakan efisiensi balik. Dengan merasakan torsi yang kemudi yang bekerja atau momen
pelurusan (aligning moment) akan membantu pengemudi untuk membelok secara lebih
halus. helps the driver to make smoother turn. Roda gigi kemudi model rack-and pinion dan
recirculating ball memiliki umpan balik torsi kemudi roda ke pengemudi. Namun demikian,
roda gigi kemudi jenis cacing dan sektor gigi memiliki umpan balik yang sangat lemah.
Umpan balik yang rendah mungkin diperlukan untuk kendaraan off-road, guna mengurangi
kelelahan pengemudi. Dengan alasan keselamatan, umpan balik torsi kemudi hendaknya
proporsional terhadap kecepatan kendaraan. Dalam hal ini, torsi yang diperlukan untuk
mengemudikan kendaraan akan lebih besar pada kecepatan kendaraan yang lebih besar.
Kemudi semacam itu akan mencegah sudut belok yang besar dan tajam. Peredam kemudi
dengan koefisien redaman yang membesar terhadap kecepatan adalah mekanisme yang
mampu memiliki sifat seperti itu. Suatu peredam kemudi dapat juga mengurangi getaran
akibat goncangan.
Contoh 278 Power steering.
Power steering telah dikembangkan sejak tahun 1950 an ketika pertama kali diperkenalkan
sistem kemudi dengan bantuan tenaga hidrolis. Sejak saat itu, bantuan daya menjadi
komponen standar pada sistem kemudi kendaraan. Dengan menggunakan tekanan hidrolis
yang disupli dari poma, yang digerakkan oleh motor, memperkuat torsi yang diberikan oleh
pengemudi. pada handel kemudi. Akibatnya, kerja mengemudi menjadi berkurang. Pada
tahun akhir-akhir ini, diperkenalkan penguat torsi elllektris pada sistem kemudi automotif,
24

sebagai ganti penguat hidrolis. Power steering elektris lebih efisien daripada power steering
konvensional, karena motor listrik hanya bekerja bilamana handel kemudi diputar,
sedangkan pompa hidrolis bekerja terus menerus. Tingkat bantuan yang diperlukan dapat
disesuaikan dengan tipe kendaraan, kecepatan, dan kesukaan pengemudi.
Example 279 Bump steering.
The steer angle generated by the vertical motion of the wheel with respect
to the body is called bump steering. Bump steering is usually an
undesirable phenomenon and is a function of the suspension and steering
mechanisms. If the vehicle has a bump steering character, then the wheel
steers when it runs over a bump or when the vehicle rolls in a turn. As a
result, the vehicle will travel in a path not selected by the driver.
Bump steering occurs when the end of the tie rod is not at the instant
center of the suspension mechanism. Hence, in a suspension deflection, the
suspension and steering mechanisms will rotate about different centers.
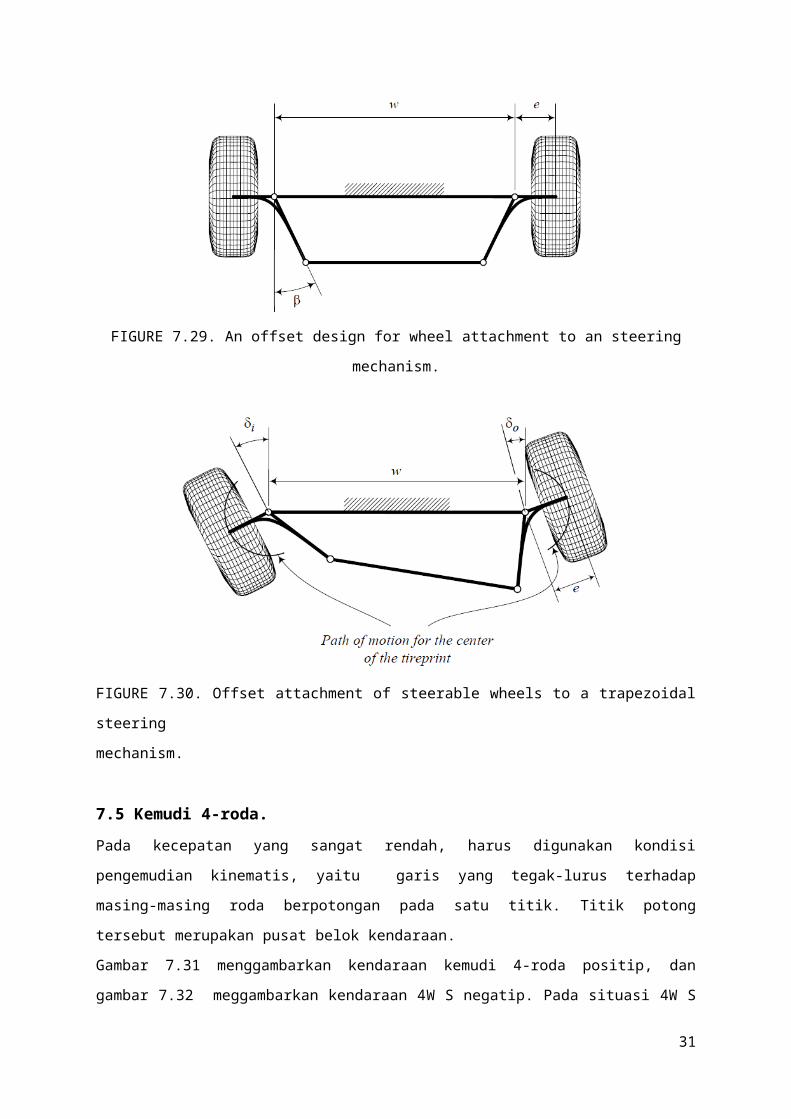
Contoh 280 Sumbu kemudi bergeser (Offset steering axis)
Secara teoristis, sumbu kemudi masing-masing roda kemudi harus vertikal lewat pusat roda
pada bidang ban, untuk meminimalkan torsi kemudi yang diperlukan. Gambar 7.27 adalah
suatu contoh mengepaskan pusat roda dengan sumbu kemudi. Namun demikian, mungkin
memasang roda ke mekanisme kemudi, dengan sumbu bergeser, seperti terlihat pada
gambar 7.29. Gambar 7.30 menggambarkan mekanisme trapesoida kemudi dengan
pemasangan roda yang bergeser. Lintasan gerak pusat tapak-roda pada desain ini adalah
suatu lingkaran dengan radius e yang sama dengan lengan geser (offset arm). Desain
semacam ini tidak dianjurkan untuk kendaraan jalan-raya, khususnya karena torsi kemudi
yang sangat besar pada keadaan berhenti. Namun demikian torsi kemudi akan berkurang
secara dramatis bila kendaraan bergerak.Lagi pula, desain offset kadang-kadang
menjadikan lebih banyak tempat pemasangan peralatan lain, dan mudah dibuat. Sehingga
hal tersebut dapat digunakan pada kendaraan off-road kecil atau kendaraan mainan.
25

FIGURE 7.29. An offset design for wheel attachment to an steering mechanism.
FIGURE 7.30. Offset attachment of steerable wheels to a trapezoidal steering
mechanism.
7.5 Kemudi 4-roda.
Pada kecepatan yang sangat rendah, harus digunakan kondisi pengemudian kinematis,
yaitu garis yang tegak-lurus terhadap masing-masing roda berpotongan pada satu titik. Titik
potong tersebut merupakan pusat belok kendaraan.
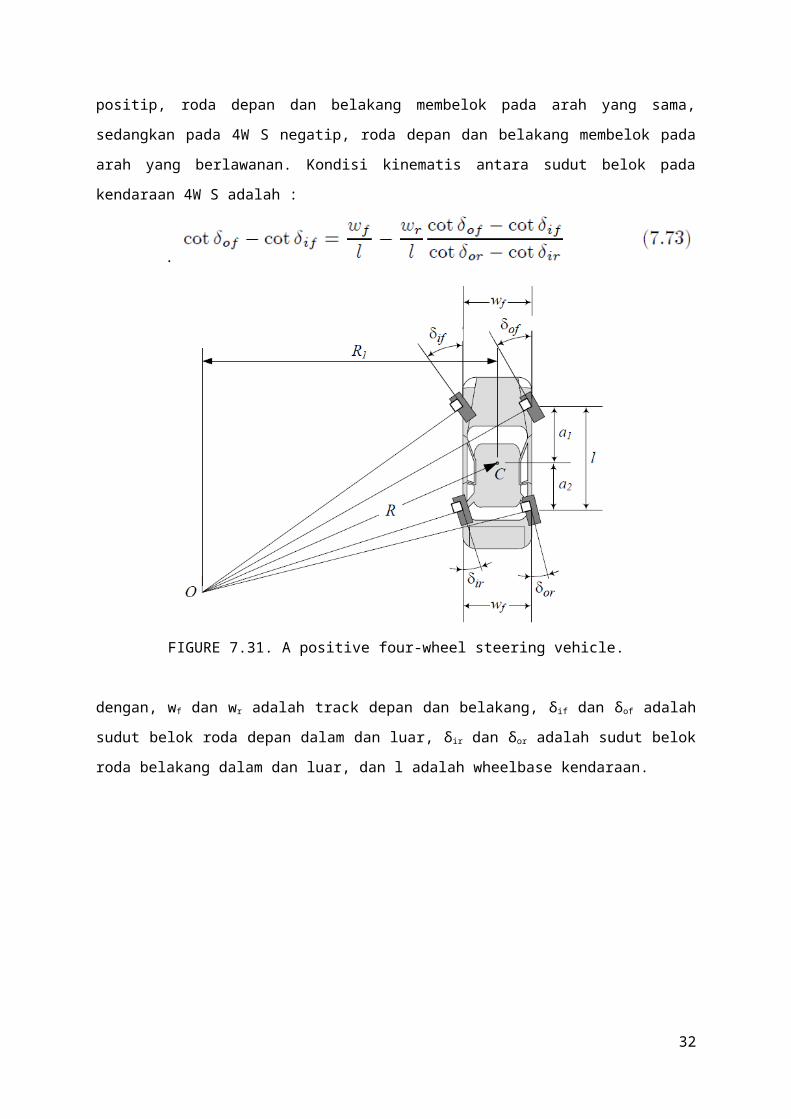
Gambar 7.31 menggambarkan kendaraan kemudi 4-roda positip, dan gambar 7.32
meggambarkan kendaraan 4W S negatip. Pada situasi 4W S positip, roda depan dan
belakang membelok pada arah yang sama, sedangkan pada 4W S negatip, roda depan dan
belakang membelok pada arah yang berlawanan. Kondisi kinematis antara sudut belok pada
kendaraan 4W S adalah :
.
26

FIGURE 7.31. A positive four-wheel steering vehicle.
dengan, wf dan wr adalah track depan dan belakang, δif dan δof adalah sudut belok roda
depan dalam dan luar, δir dan δor adalah sudut belok roda belakang dalam dan luar, dan l
adalah wheelbase kendaraan.
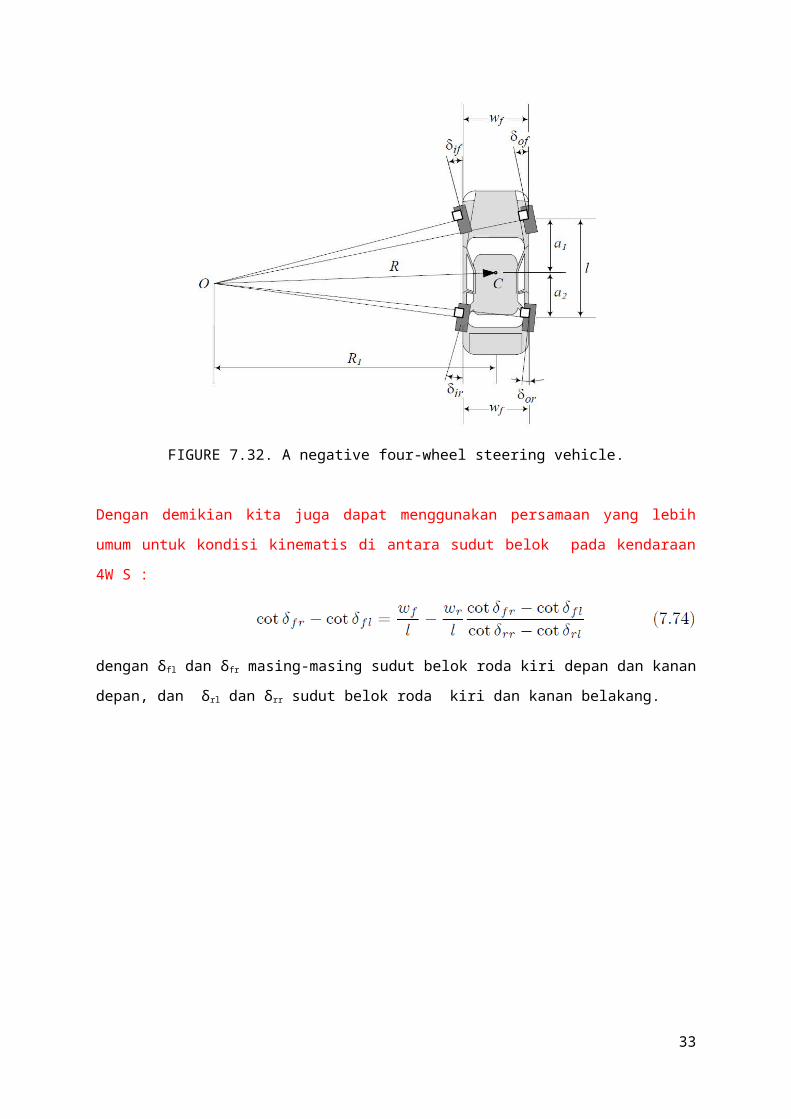
FIGURE 7.32. A negative four-wheel steering vehicle.
Dengan demikian kita juga dapat menggunakan persamaan yang lebih umum untuk kondisi
kinematis di antara sudut belok pada kendaraan 4W S :
27

dengan δfl dan δfr masing-masing sudut belok roda kiri depan dan kanan depan, dan δrl dan
δrr sudut belok roda kiri dan kanan belakang.
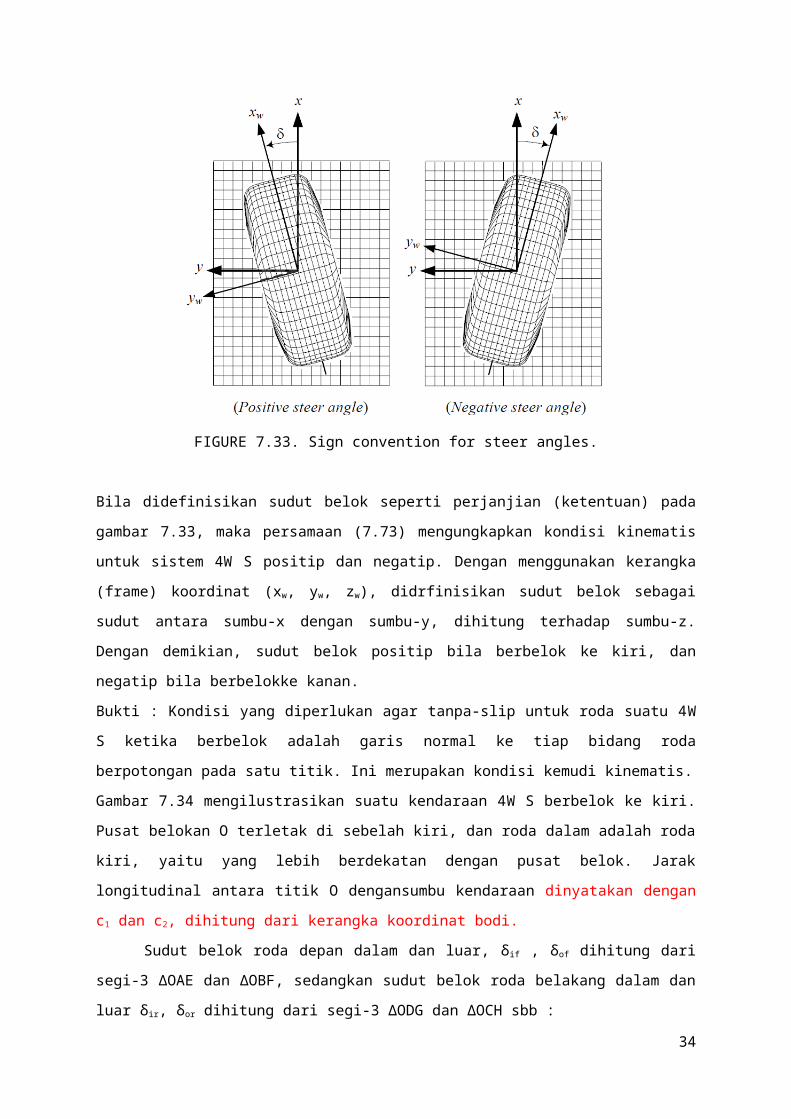
FIGURE 7.33. Sign convention for steer angles.
Bila didefinisikan sudut belok seperti perjanjian (ketentuan) pada gambar 7.33, maka
persamaan (7.73) mengungkapkan kondisi kinematis untuk sistem 4W S positip dan negatip.
Dengan menggunakan kerangka (frame) koordinat (xw, yw, zw), didrfinisikan sudut belok
sebagai sudut antara sumbu-x dengan sumbu-y, dihitung terhadap sumbu-z. Dengan
demikian, sudut belok positip bila berbelok ke kiri, dan negatip bila berbelokke kanan.
Bukti : Kondisi yang diperlukan agar tanpa-slip untuk roda suatu 4W S ketika berbelok
adalah garis normal ke tiap bidang roda berpotongan pada satu titik. Ini merupakan kondisi
kemudi kinematis.
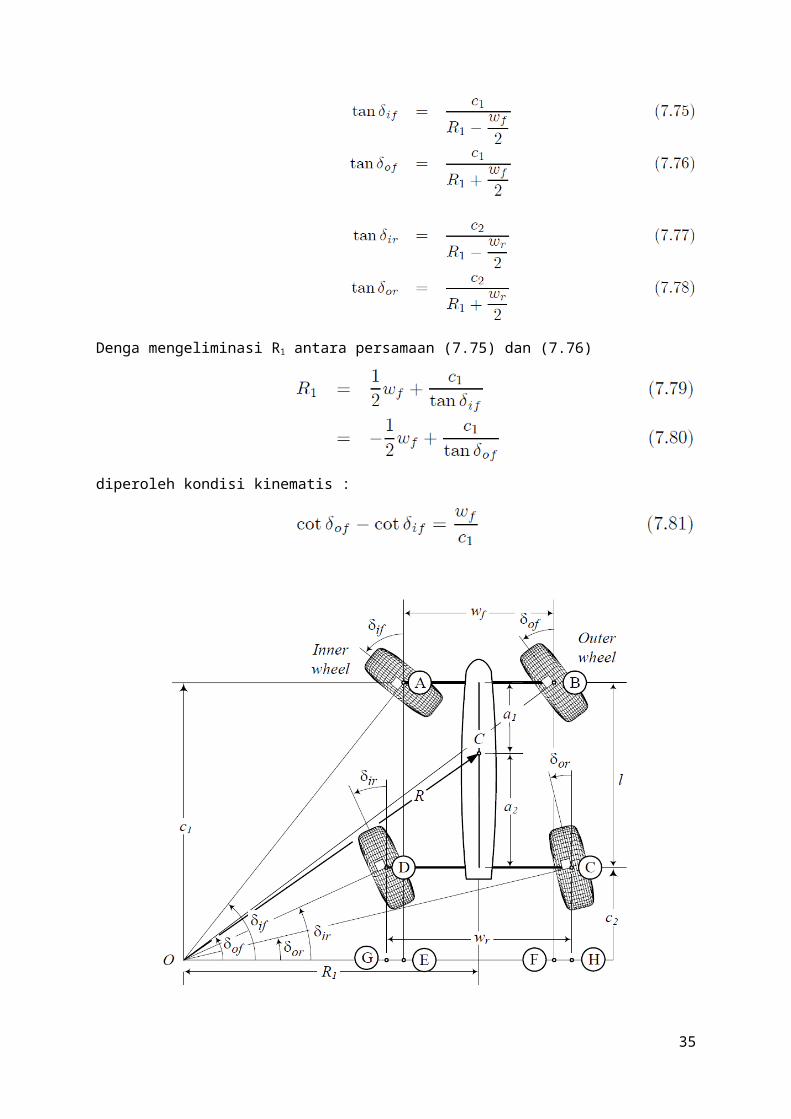
Gambar 7.34 mengilustrasikan suatu kendaraan 4W S berbelok ke kiri. Pusat belokan O
terletak di sebelah kiri, dan roda dalam adalah roda kiri, yaitu yang lebih berdekatan dengan
pusat belok. Jarak longitudinal antara titik O dengansumbu kendaraan dinyatakan dengan c1
dan c2, dihitung dari kerangka koordinat bodi.
Sudut belok roda depan dalam dan luar, δif , δof dihitung dari segi-3 ΔOAE dan
ΔOBF, sedangkan sudut belok roda belakang dalam dan luar δ ir, δor dihitung dari segi-3
ΔODG dan ΔOCH sbb :
28
Denga mengeliminasi R1 antara persamaan (7.75) dan (7.76)
diperoleh kondisi kinematis :
FIGURE 7.34. Illustration of a negative four-wheel steering vehicle in a left turn.
29
Dengan cara yang sama, dapat dieliminasi R1 antara persamaan (7.77) dan (7.78) :
diperoleh kondisi kinematis antara sudut belok roda belakang δir dan δor
Dengan menggunakan ketetapan :
dapat digabungkan persamaan (7.81) dan (7.84) :
untuk mendapatkan kondisi kinematis (7.73) antara sudut roda depan dan roda belakang
pada kendaraan 4W S positip.
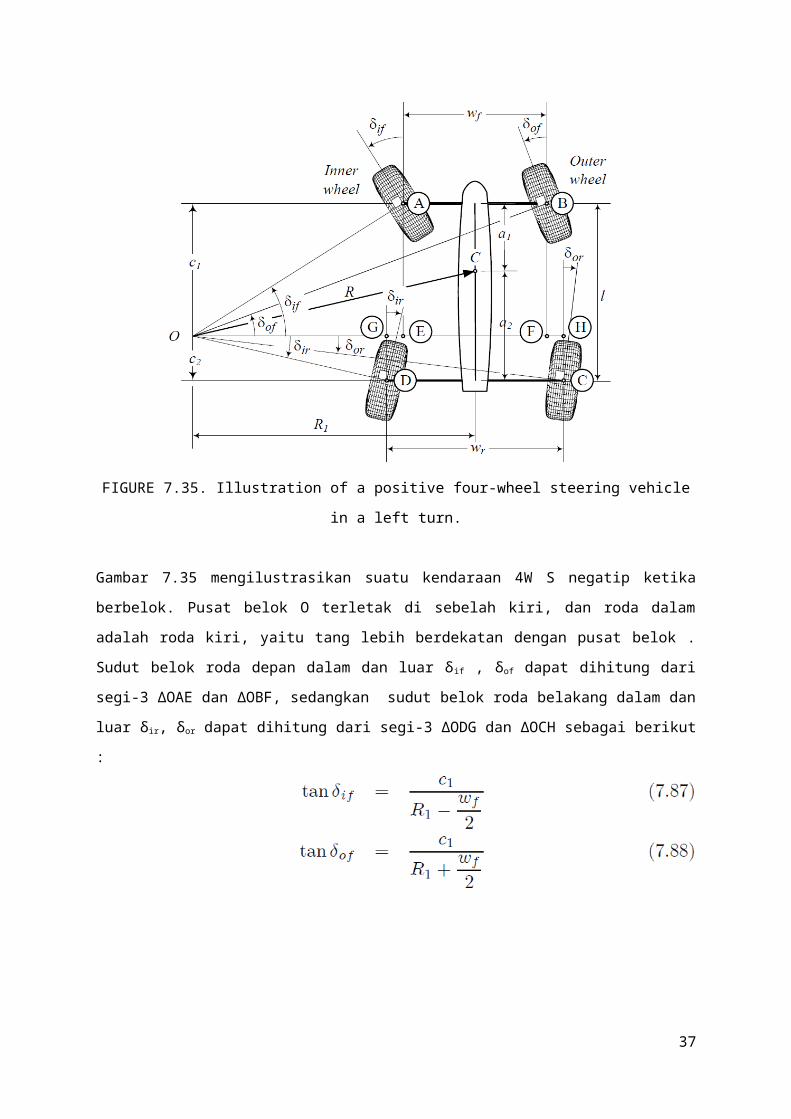
FIGURE 7.35. Illustration of a positive four-wheel steering vehicle in a left turn.
Gambar 7.35 mengilustrasikan suatu kendaraan 4W S negatip ketika berbelok. Pusat belok
O terletak di sebelah kiri, dan roda dalam adalah roda kiri, yaitu tang lebih berdekatan
dengan pusat belok . Sudut belok roda depan dalam dan luar δif , δof dapat dihitung dari segi-
30
3 ΔOAE dan ΔOBF, sedangkan sudut belok roda belakang dalam dan luar δir, δor dapat
dihitung dari segi-3 ΔODG dan ΔOCH sebagai berikut :
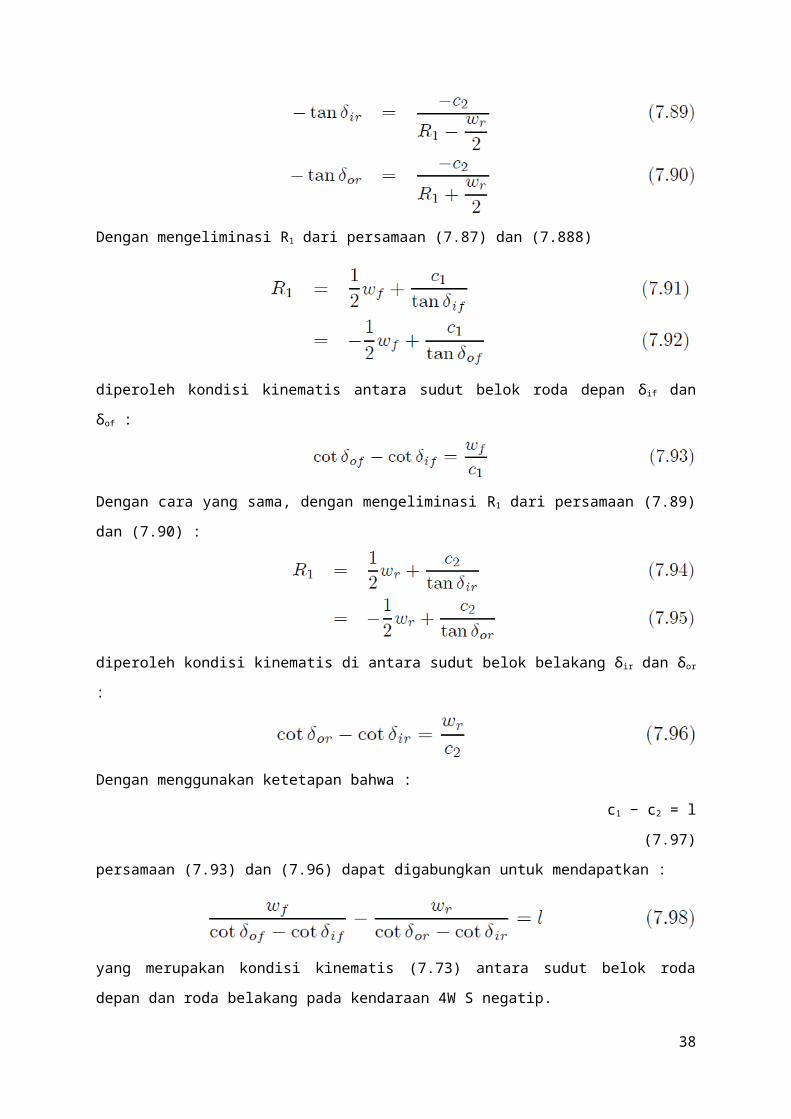
Dengan mengeliminasi R1 dari persamaan (7.87) dan (7.888)
diperoleh kondisi kinematis antara sudut belok roda depan δif dan δof :
Dengan cara yang sama, dengan mengeliminasi R1 dari persamaan (7.89) dan (7.90) :
diperoleh kondisi kinematis di antara sudut belok belakang δir dan δor :
Dengan menggunakan ketetapan bahwa :
c1 − c2 = l (7.97)
persamaan (7.93) dan (7.96) dapat digabungkan untuk mendapatkan :
yang merupakan kondisi kinematis (7.73) antara sudut belok roda depan dan roda belakang
pada kendaraan 4W S negatip.
31
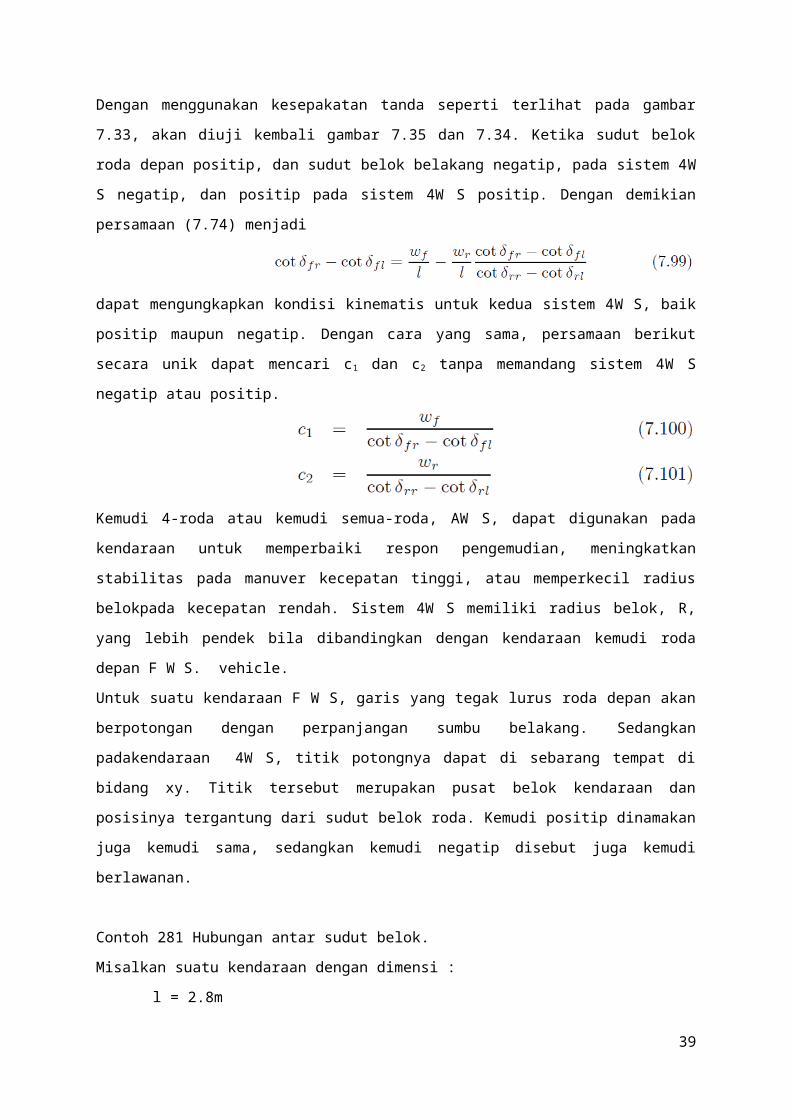
Dengan menggunakan kesepakatan tanda seperti terlihat pada gambar 7.33, akan diuji
kembali gambar 7.35 dan 7.34. Ketika sudut belok roda depan positip, dan sudut belok
belakang negatip, pada sistem 4W S negatip, dan positip pada sistem 4W S positip. Dengan
demikian persamaan (7.74) menjadi
dapat mengungkapkan kondisi kinematis untuk kedua sistem 4W S, baik positip maupun
negatip. Dengan cara yang sama, persamaan berikut secara unik dapat mencari c1 dan c2
tanpa memandang sistem 4W S negatip atau positip.
Kemudi 4-roda atau kemudi semua-roda, AW S, dapat digunakan pada kendaraan untuk
memperbaiki respon pengemudian, meningkatkan stabilitas pada manuver kecepatan tinggi,
atau memperkecil radius belokpada kecepatan rendah. Sistem 4W S memiliki radius belok,
R, yang lebih pendek bila dibandingkan dengan kendaraan kemudi roda depan F W S.
vehicle.
Untuk suatu kendaraan F W S, garis yang tegak lurus roda depan akan berpotongan dengan
perpanjangan sumbu belakang. Sedangkan padakendaraan 4W S, titik potongnya dapat di
sebarang tempat di bidang xy. Titik tersebut merupakan pusat belok kendaraan dan
posisinya tergantung dari sudut belok roda. Kemudi positip dinamakan juga kemudi sama,
sedangkan kemudi negatip disebut juga kemudi berlawanan.
Contoh 281 Hubungan antar sudut belok.
Misalkan suatu kendaraan dengan dimensi :
l = 2.8m
wf = 1.35m
wr = 1.4m (7.102)
Serangkaian persamaan (7.75)-(7.78) yang sama dengan persamaan (7.87)-(7.90) harus
dapat digunakan untuk sudut belok kinematis roda. Anggap salah satu sudutnya adalah :
δif = 150 (7.103)
diketahui sebagai sudut belok input. Untuk mencari sudut-sudut belok lain perlu diketahui
pusat belok O. Posisi pusat belok dapat dicari bila diketahui salah satu dari tiga parameter
c1, c2, R1. Untuk memperjelas keadaan ini, anggap bahwa kendaraan berbelok ke kiri dan
telah diketahui harga δif . Dengan demikian garis yang tegak lurus dengan roda kiri depan
diketahui. Pusat belok dapat berada di sebarang titik di garis ini. Bila diambil suatu titik pada
32
garis ini sebagai pusat belok, maka sudut belok roda yang lain dapat diatur menyesuaikan
dengan titik ini.
Sudut belok untuk sistem 4W S adalah rangkaian dari 4-persamaan, masing-masing
dengan 2 variabel.
Bila c1 dan R1 diketahui, maka dapat dicari sudut belok δif ,δof , δir, dan δor secara unik.
Namun demikian, pada situasi praktis, bila salah satu sudut belok diketahui, misalkan δif ,
dan akan dicari sudut-sudut belok lain, yaitu δof , δir, δor., maka dapat dicari bila diketahui c1
atau R1.
Pusat belok merupakan pusat kelengkungan lintasan jalan. Bila lintasan jalan diketahui,
maka pusat belok dapat dicari pada kerangka koordinat kendaraan.
Dalam contoh ini, anggap
R1 = 50m (7.108)
maka, dari persamaan (7.75), diperoleh :
Karena c1 > l dan δif > 0 maka kendaraan tersebut adalah 4W S positip, dan pusat belok
terletak di belakang kendaraan
Dengan menggunakan persamaan (7.76)-(7.78) dapat diperoleh sudut belok lainnya :
33
Contoh 282 Posisi pusat belok
Posisi pusat belok kendaraan, dalam kerangka koordinat bodi kendaraan, adalah suatu titik
dengan koordinat (xO, yO). Koordinat tersebat adalah :
The coordinates of the turning center
Persamaan (7.115) diperoleh dengan mensubstitusikan c1dan c2 dari persamaan (7.91) dan
(7.94) ke persamaan (7.97), dan mendefinisikan yO dalam besaran δif dan δir. Juga
memungkinkan untuk mendefinisikan yO dalam δof dan δor.
Persamaan (7.114) dan (7.115) dapat digunakan untuk mendefinisikan koordinat pusat
belok, baik untuk sistem 4W S negatip maupun positip. Sebagai contoh, misalkan akan diuji
kendaraan dengan data berikut :
l = 2.8m
wf = 1.35m
wr = 1.4m
a1 = a2 (7.116)
δif = 0.26180 rad ≈ 15 deg
δof = 0.25513 rad ≈ 14.618 deg
δir = 0.20824 rad ≈ 11.931 deg
δor = 0.20264 rad ≈ 11.61 deg (7.117)
dan dicari posisi pusat belok
34
Posisi pusat belok untuk kendaraan F W S adalah pada :
dan untuk kendaraan RWS adalah :
FIGURE 7.36. A symmetric four-wheel steering vehicle.
Contoh 283 Kelengkungan
35

Misalkan suatu jalan sebagai lintasan gerak diungkapkan secara matematis sebagai fungsi
Y = f (X), dalam kerangka koordinat global. Radius kelengkungan Rκ jalan tersebut pada titik
X adalah :
dengan
Sistem kemudi 4-roda simetris
Gambar 7.36 mengilustrasikan sustu kendaraan 4W S dengan roda depan dan belakang
membelok dengan sudut yang sama tetapi berlawanan arah. Kondisi pengemudian
kinematis untuk pengemudian yang simetris dapat disederhanakan sebagai :
dan c1 dan c2 direduksi menjadi :
Contoh 285 Rasio c2/c1
Jarak memanjang (longitudinal) pusat belok kendaraan dari sumbu depan adalah c1 dan dari
sumbu belakang adalah c2. Rasio jarak ini diungkapkan dengan cs dan dinamakan faktor
4WS.
Harga cs negatip untuk kendaraan 4W S negatip dan positip untuk kendaraan 4W S positip.
Bila cs = 0, kendaraan adalah F W S, dan bila cs = −∞, kendaraan adalah RW S. Untuk
kendaraan 4W S simetris memilki cs = -1/2.
Contoh 286 Panjang belokan ls.
36
Untuk kendaraan 4W S, dapat didefinisikan panjang belokan ls sebagai :
Panjang belokan (steering length) ls berharga 1 untuk kendaraan F W S, berharga nol untuk
kendaraan simetris, dan berharga -1 untuk kendaraa RW S. Bila suatu kendaraan memiliki
sistem 4W S negatip, maka −1 < ls < 1, dan bila kendaraan adalah sistem 4W S maka ls > 1
atau ls < −1. Dalam hal ls >1, adalah bila pusat belok terletak di belakang kendaraan, dan
dalam hal ls < −1 maka bila pusat belok berada di depan kendaraan.
Contoh 287 F W S dan kondisi Ackerman
Bila suatu kendaraan dengan sistem F W S, kondisi Ackerman (7.1) dapat dituliskan dengan
persamaan sbb :
Penulisan kondisi Ackerman dengan persamaan tersebut tidak perlu memperhatikan roda
bagian dalam atau luar.
Contoh 288 Radius belok
Untuk mencari besarnya radius belok R, maka didefinisikan model sepeda-motor eqivalen
seperti terlihat pada gambar 7.37 dan 7.38 untuk kendaraan 4W S positip dan negatip.
FIGURE 7.37. Bicycle model for a positive 4W S vehicle.
37
Radius rotasi R tegak lurus vektor kecepatan kendaraan v pada pusat massa C. Akan diuji
situasi 4W S positip pada gambar 7.37. Dengan menggunakan geometri pada model
sepeda-motor didapatkan
dan dengan demikian
Dengan menguji gambar 7.38 menujukkan bahwa radius belok kendaraan 4W S negatip
dapat dicari dengan persamaan yang sama dengan persamaan (7.133).
FIGURE 7.38. Bicycle model for a negative 4W S vehicle.
Contoh 289 Perbandingan antara F W S dan 4W S.
Pusat belok kendaraan F W S selalu terletak di perpanjangan sumbu belakang, dan panjang
beloknya (steering length) ls selalu sama dengan 1. Namun demikian , pusat belok untuk
kendaraan 4W S dapat terjadi :
1. di depan sumbu depan, bila ls < −1
2. di antara sumbu depan dan belakang, bila −1 < ls < 1, atau
3. di belakang sumbu belakang, bila 1 < ls
38
Perbandingan di antara berbagai panjang belok ditunjukkan pada gambar 7.39. Kendaraan
F W S terlihat pada gambar 7.39(a), sedangkan sistem 4W S dengan ls < −1, −1 < ls < 1, dan
1 < ls ditunjukkan berturut-turt pada gambar 7.39(b)-(d).
Contoh 290 Kemudi 4-roda aktif dan pasif
Sistem 4W S negatip tidak dianjurkan digunakan pada kecepatan tinggi, karena adanya laju
yaw yang tinggi, dan kemudi positip tidak dianjurkan digunakan pada kecepatan rendah,
karena adanya kenaikan radius belok. Dengan demikian untuk memaksimalkan manfaat
sistem 4W S, diperlukan sistem cerdas yang memungkinkan roda untuk merubah mode
pengemudian, tergantung dari kecepatan kendaraan, dan menyesuaikan sudut belok untuk
berbagai keperluan. Pengemudian cerdas (smart) disebut juga sistem pengemudian aktif.
Pada sistem kemudi aktif, ketika kecepatan rendah roda pada keadaan kemudi negatip dan
pada kecepatan tinggi berubah menjadi kemudi positip. Pada kondisi kemudi negatip, roda
belakang akan membelok berlawanan dengan roda depan, bilamana roda depan membelok
dengan radiu yang jauh lebih kecil, sedangkan pada kondisi kemudi positip, roda belakang
membelok dengan membelok searah dengan roda depan, untuk memperbesar gaya lateral.
39

Pada sistem 4W S pasif, terjadi rasio proposional yang konstan antara sudut belok depan
dengan sudut belok belakang, yang ekivalen dengan cs yang kinstan.
Kemudi pasip digunakan untuk mengkompensasi kecenderungan suatu kendaraan. Sebagai
contoh, pada sistem F W S, roda belakang cenderung untuk sedikit membelok menuju ke
arah luar. Kecenderungan ini dapat mengurangi stabilitas.
Contoh 291 Autodriver.
Misalkan suatu kendaraan berjalan di jalan seperti terlihat pada gambar 7.40. Titik O
menunjukkan pusat kelengkungan jalan pada titik posisi kendaraan. Pusat kelengkungan
jalan dianggap sebagai pusat belok kendaraan pada keadaan sesaat. Ada kerangka
koordinat global G yang dipasang pada jalan, dan kerangka koordinat kendaraan dipasang
pada pusat massa C. Sumbu-sumbu z dan Z sejajar dan sudut ψ menunjukkan sudut antara
sumbu X dan x. Bila (XO, YO) adalah koordinat O pada kerangka koordinat global G, maka
FIGURE 7.40. Illustration of a car that is moving on a road at the point that O is the center of
curvature.
koordinat O di B adalah :
Dengan diketahuinya koordinat O pada kerangka koordinat kendaraan, maka hal tersebut
cukup untuk mencari R1, c1, dan c2.
40

Kemudian, sudut belok roda dapat secara unik dicari dengann persamaan (7.75)-(7.78).
Hal ini memungkinkan untuk mendefinisikan untuk mendefinisikan jalan dengan suatu fungsi
matematis Y = f (X) dalam koordinat global. Pada sebarang titik X yang terletak di jalan,
maka posisi kendaraan dan posisi pusat belok pada kerangka koordinat kendaraan, dapat
dicari. Sudut belok yang diperlukan dapat disusun, untuk menjaga agar kendaraan tetap
pada lintasan dan arah yang benar. Prinsip ini dapat digunakan untuk mendesain suatu
autodriver.
Contoh 292 Persamaan kelengkungan
Misalkan suatu kendaraan bejalan pada lintasan Y = f (X) dengan kecepatan v dan
percepatan a. Kelengkungan lintasan κ = 1/R ketika kendaraan berjalan adalah :
dengan an adalah komponen normal percepatan a. Komponen normal an menuju pusat
rotasi dan harganya sama dengan
dan dengan demikian
Namun demikian,
41

dan dapat diperoleh persamaan kelengkungan lintasan, berbasis persamaan lintasan :
7.6 Optimisasi Mekanisme Pengemudian
Optimisasi dimaksudkan bahwa mekanisme pengemudian didesain agar mampu
bekerja sedekat mungkin dengan fungsi yang dikehendaki. Misalkan dikehendaki suatu
sistem kemudi dengan fungsi kondisi kinematis Ackerman. Dengan membandingkan fungsi
sistem kemudi yang didesain dengan kondisi Ackerman, dapat didefinisikan fungsi
kesalahan (error) e guna membandingkan kedua fungsi. Sebagai contoh fungsi e, dapat
berupa selisih antara sudut belok luar mekanisme yang didesain dengan δDo dengan kondisi
Ackerman δAo pada harga sudut dalam δi yang sama.
Fungsi error dapat berupa harga mutlak selisih maksimumnya,
e = max|δDo − δAo | (7.144)
atau root mean square (RMS) selisih kedua fungsi,
dalam range δi tertentu.
Error e, hendaknya merupakan suatu fungsi seperangkat parameter. would be a function of
a set of parameters. Dengan meminimalkan fungsi erer e, pada daerah sudut belok δi,dapat
diperoleh harga parameter optimal. Fungsi RMS (7.145) didefinisikan untuk variabel δDo dan
δAo yang kontinyu. Namun demikian, tidak selalu dapat diperoleh suatu persamaan e dalam
bentuk-tertutup (closed-form). Dalam hal ini, fungsi eror tidak dapat didefinisikan secara
eksplisit, dengan demikian fungsi eror harus dievaluasi (dihitung) pada berbagai harga δi
secara numerik. Funsi eror untuk seperangkat harga diskrit e didefinisikan sebagai :
Fungsi eror (7.145) atau (7.146) harus dievaluasi pada berbagai harga suatu parameter.
Kemudian digambarkan e = e(parameter) sehingga dapat ditunjukkan tren variasi e sebagai
fungsi parameter tersebut. Bila terdapat harga e minimum, maka diperoleh harga optimal
parameter tersebut. Sebaliknya, tren fungsi e dapat menunjukkan arah pencarian harga
minimum.
42

Contoh 293 Optimasi mekanisme kemudi trapezoidal
Hubungan antara sudut belok dalam-luar pada mekanisme kemudi trapezoidal, seperti
ditunjukkan pada gambar 7.6, adalah :
Dengan membandingkan persamaan (7.147) dengan kondisi Ackerman,
dapat didefinisikan fungsi eror e
dan dicari harga minimumnya untuk mengoptimalkan mekanisme kemudi trapezoidal.
Misalkan suatu kendaraan dengan dimensi
w = 2.4m
l = 4.8m. (7.150)
Akan dioptimasi mekanisme tersebut dengan
d = 0.4m (7.151)
dan menggunakan β sebagai parameter.
Dengan menggambarkan (mengeplot) perbandingan antara mekanisme tersebut dengan
kondisi Ackerman, pada berbagai harga β, seperti terlihat pada gambar 7.9, dan harga
selisih keduanya Δδo = δDo − δAo ditunjukkan pada gambar 7.10.
43

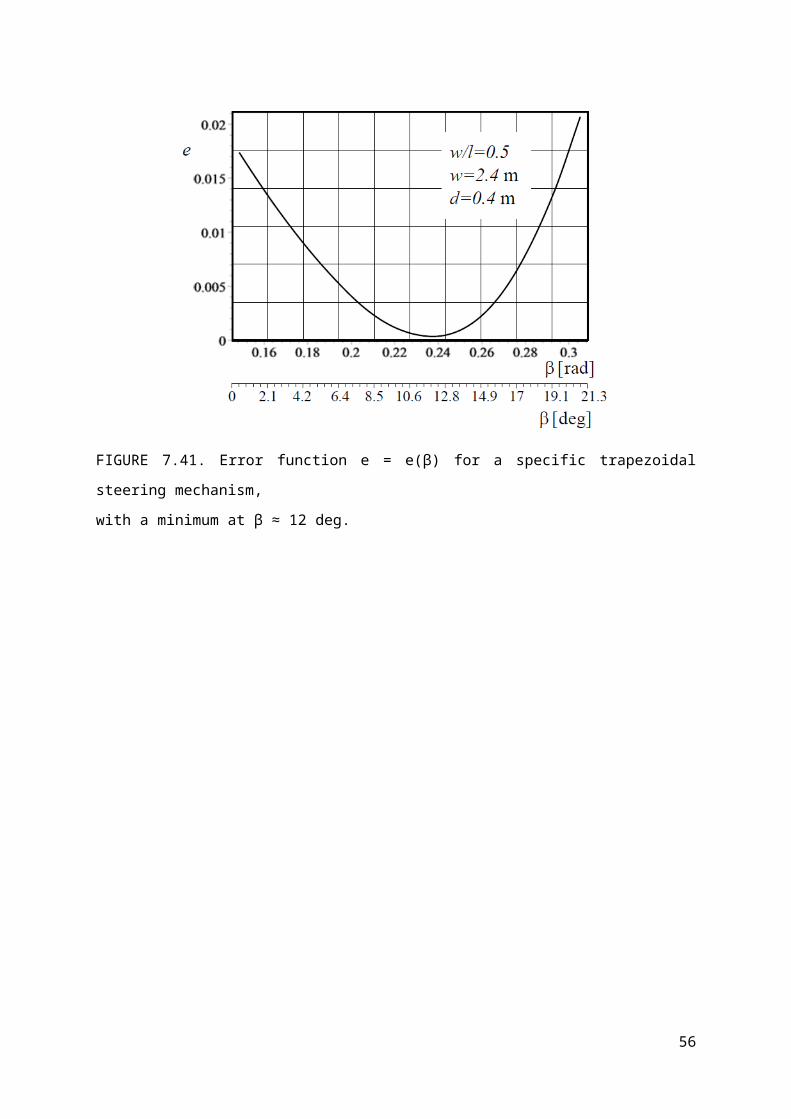
Dapat ditetapkan harga β, misal β = 60 , dan mengevaluasi δDo dan δAo pada n = 100
macam harga δi dalam jangkauan misalkan −400 ≤ δi ≤ 400. Kemudian dihitung harga fungsi
eror e yang berkaitan :
pada harga β tertentu. Kemudian dilakukan lagi perhitungan untuk harga-harga β yang lain,
misalkan β = 8deg,9deg, · · · . Gambar 7.41 melukiskan fungsi e = e(β), dengan suatu harga
minimum pada β ≈ 12 deg.
44

Geometri (bentuk) mekanisme kemudi trapezoidal yang optimal ditunjukkan pada gambar
7.42(a). Kedua lengan samping berpotongan di titik G pada perpanjangan keduanya.
Untuk mekanisme yang optimal, titik potong G terletak di sisi luar sumbu belakang.
Namundemikian, dianjurkan untuk meletakkan titik potong tersebut di tengah-tengah sumbu
belakang dan mendesain mekanisme kemudi trapesoidal yang mendekati optimal. Dengan
mengikuti anjuran tersebut, maka memungkinkan untuk mengeliminasi proses optimisasi
dan mendapatkan desain yang cukup baik. Desain dengan estimasi tersebut ditunjukkan
pada gambar 7.42(b). Sudut β unmtuk desain yang optimal adalah β = 12.6deg, dan untuk
desain yang diestimasi β = 13.9deg.
FIGURE 7.41. Error function e = e(β) for a specific trapezoidal steering mechanism,
with a minimum at β ≈ 12 deg.
45
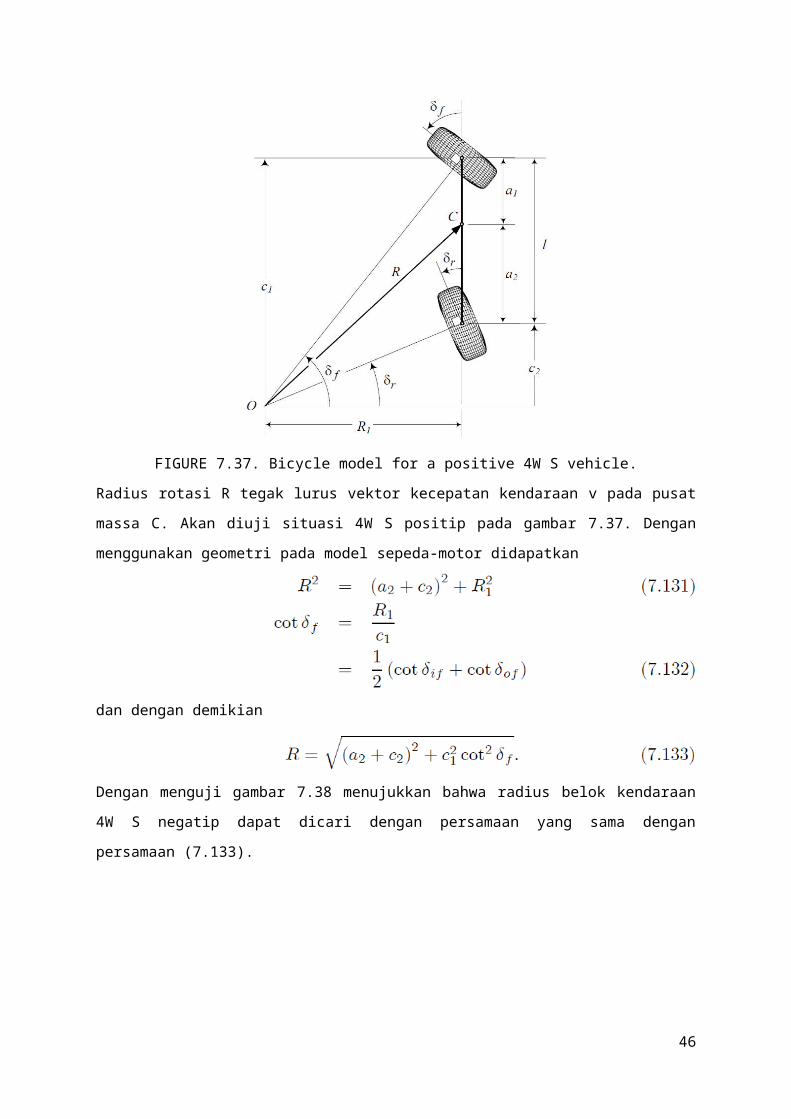
FIGURE 7.42. The geometry of the optimal trapezoidal steering mechanism and
the estimated design.
Contoh 294 Tidak ada mekanisme Ackerman yang eksak.
Adalah tidak mungkin untuk membuat hubungan (linkage) sederhana yang dapat bekerja
secara eksak berdasarkan kondisi kemudi Ackerman. Namun demikian, memungkinkan
untuk mengoptimalkan berbagai hubungan sistem kemudi dalam suatu daerah kerja, agar
bekerja mendekati kondisi Ackerman, dan secara eksak sama pada beberapa titik. Suatu
hubungan trapesoidal tidaklah sama persis (eksak) dengan sistem kemudi Ackerman pada
sebarang radius belok, namun sistem ini cukup sederhana untuk dibuat secara massal, dan
bekerja cukup eksak untuk kendaraan.
Contoh 295 Optimisasi mekanisme kemudi multi-link.
Misalkan akan didesain suatu mekanisme kemudi multi-link untuk suatu kendaraan dengan
spesifikasi.
w = 2.4m
l = 4.8m (7.153)
a2 = 0.45l
Mengingat adanya keterbatasan ruang, maka posisi beberapa sambungan mekanisme
tersebut dibuat seperti pada gambar 7.43. Namun, panjang x divariasi untuk mendapatkan
kondisi yang terbaik yang sesuai dengan kondisi Ackerman.
46

Input roda kemudi δs memutar sigi-3 P BC yang akan membelokkan rroda kiri dan kanan.
Kendaraan harus mampu membelok dalam lingkaran dengan radius Rm.
Rm = 10m (7.155)
Radius belok minimum menentukan sudut belok maksimum δ
dengan δ rata-rata-cot sudut belok dalam dan luar. Dengan diketahuinya R dan δ, cukup
untuk menentukan harga-harga δo dan δi.
Karena mekanisme tersebut simetris, maka masing-masing roda mekanisme kemudi pada
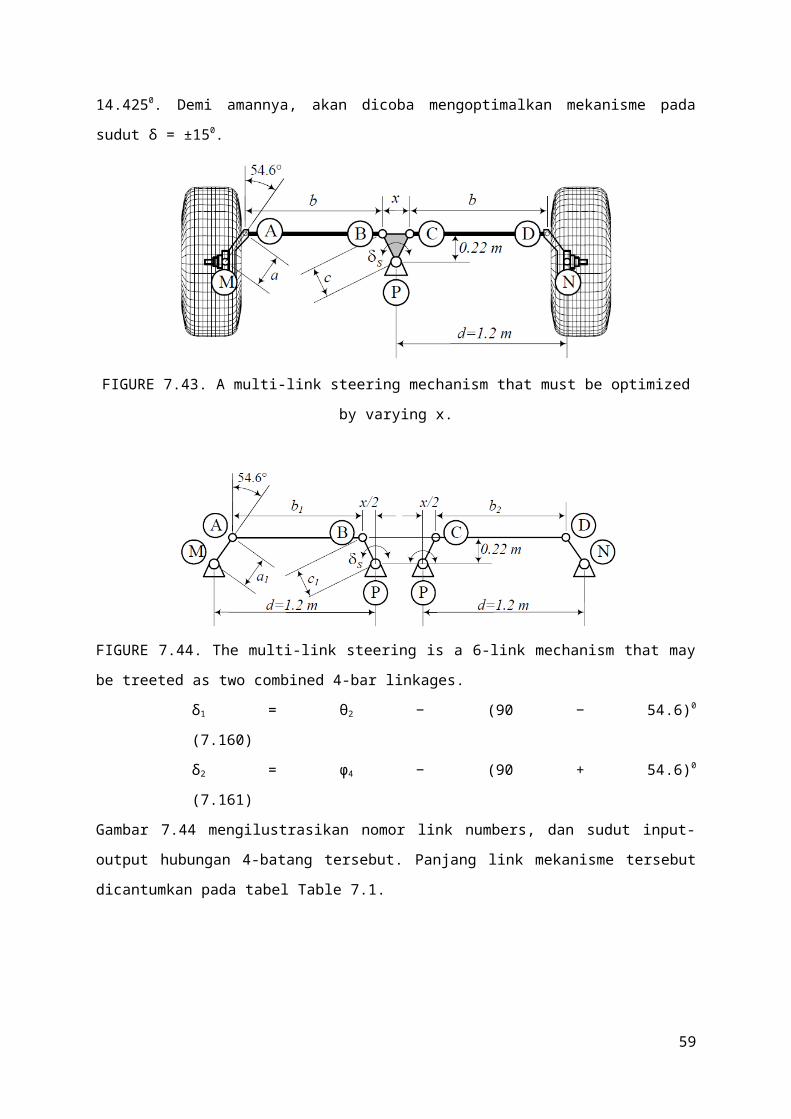
gambar 7.43 harus mampu membelok paling tidak 14.4250. Demi amannya, akan dicoba
mengoptimalkan mekanisme pada sudut δ = ±150.
FIGURE 7.43. A multi-link steering mechanism that must be optimized by varying x.
47
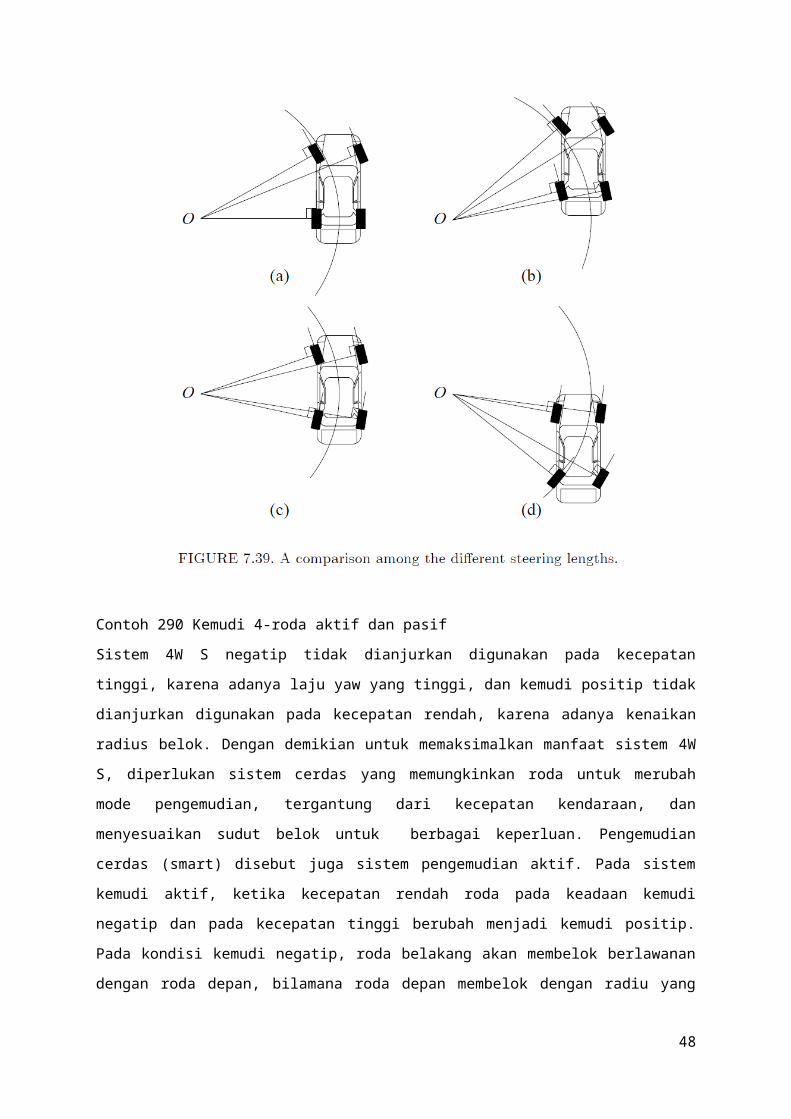
FIGURE 7.44. The multi-link steering is a 6-link mechanism that may be treeted as two
combined 4-bar linkages.
δ1 = θ2 − (90 − 54.6)0 (7.160)
δ2 = ϕ4 − (90 + 54.6)0 (7.161)
Gambar 7.44 mengilustrasikan nomor link numbers, dan sudut input-output hubungan 4-
batang tersebut. Panjang link mekanisme tersebut dicantumkan pada tabel Table 7.1.
FIGURE 7.45. The input and output angles of the two 4-bar linkages.
Table 7.1 - Link numbers, and the input-output angles for the multi-link steering mechanism
Persamaan (6.1) dituliskan lagi, untuk memperoleh harga sudut θ4 sebagai fuungsi θ2.
48

Persamaan yang sama (7.162) dapat digunakan untuk menghubungkan sudut input-output
hubungan empat-batang sebelah kanan.
Dimulai dengan pemisalan harga x, dapat dihitung panjang link. Dengan menggunakan
persamaan (7.162) dan (7.171), dan dengan (7.160) dan (7.161), dihitung δ2 untuk harga δ1
tertentu.
49

Dimulai dengan harga x = 0, maka diperoleh :
a1 = 0.37978m
b1 = 0.89043m (7.180)
c1 = 0.22m
a2 = 0.22m
b2 = 0.89043m (7.181)
c2 = 0.37978m.
FIGURE 7.46. Steer angles δ2 and δAc versus δ1.
Dengan menggunakan persamaan 7.160) dan (7.162), dapat dihitung output linkage empat-
batang pertama, θ4, dalam daerah sudut belok kiri −150 < δ1 <150. Ketentuan (constraint)
berikut ini, dapat menentukan harga numeris ϕ2 yang digunakan sebagai input hubungan
empat-batang sebelah kanan.
Kemudian, dengan menggunakan persamaan (7.171) dan (7.162), dapat dihitung sudut
belok δ2 untuk roda kanan. Gambar 7.46 mengungkapkan harga numeris sudut belok δ2 dan
δAc versus δ1. Sudut δAc adalah sudut belok roda kanan berdasarkan persamaan (7.154).
Dengan telah diketahuinya δ2 dan δAc, dihitung selisih, Δ,
Δ = δ2 − δAc (7.183)
untuk n harga δ1 yang berbeda dalam daerah sudut −150 < δ1 < 150. Berdasarkan harga Δ
sebanyak n, dapat dicari error e.
Dengan mengubah harga x dan merekalkulasi e, menghasilkan suatu fungsi error e =e(x).
50

Gambar 7.47 mengillustrasikan hasil kalkulasi tersebut. Terlihat bahwa error mencapai
harga minimum untuk x = −0.824m, yang merupakan panjang terbaik untuk sisi dasar segi-3
P BC.
Watak mekanisme kemudi multi-link tersebut, untuk berbagai , diperlihatkan pada
gambar 7.48. Kondisi Ackerman juga diplotkan sebagai pembanding dengan mekanisme
multi-link yang optimal.
FIGURE 7.47. Illustration of the error function e = e(x).
FIGURE 7.48. The behavior of the multi-link steering mechanism for different values of x.
51
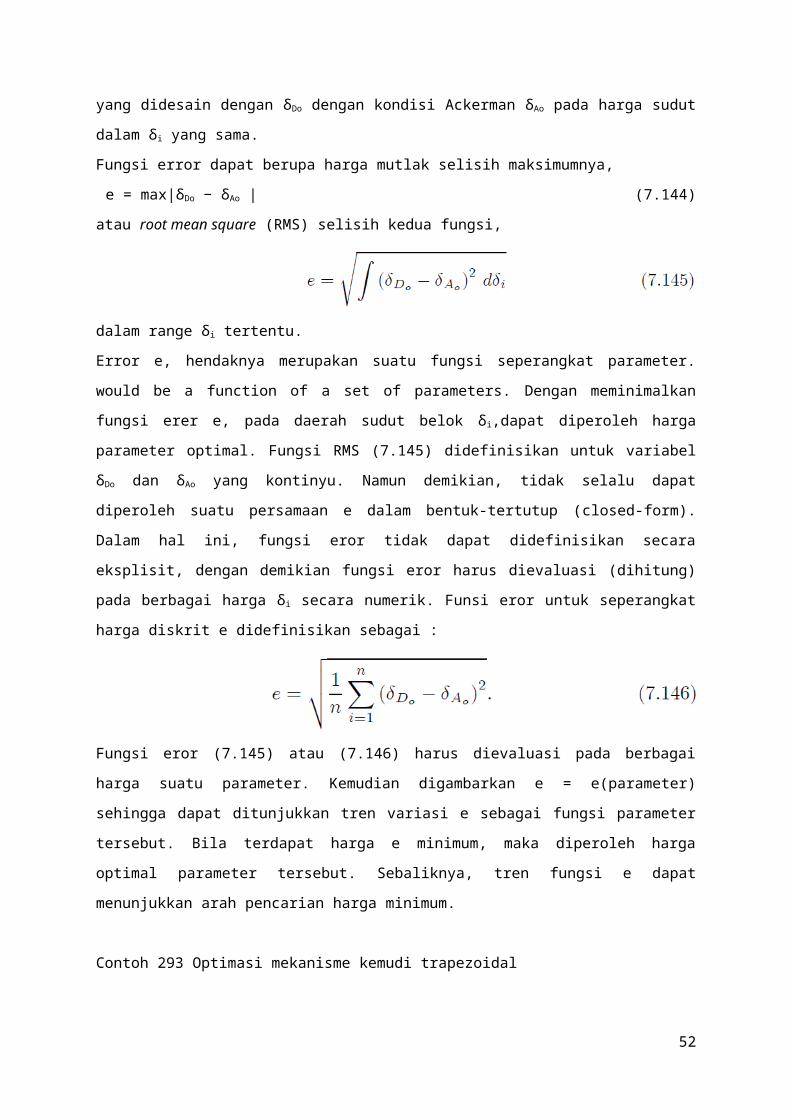
FIGURE 7.49. Illustration of the difference Δ = δ2 − δAc for different values of x.
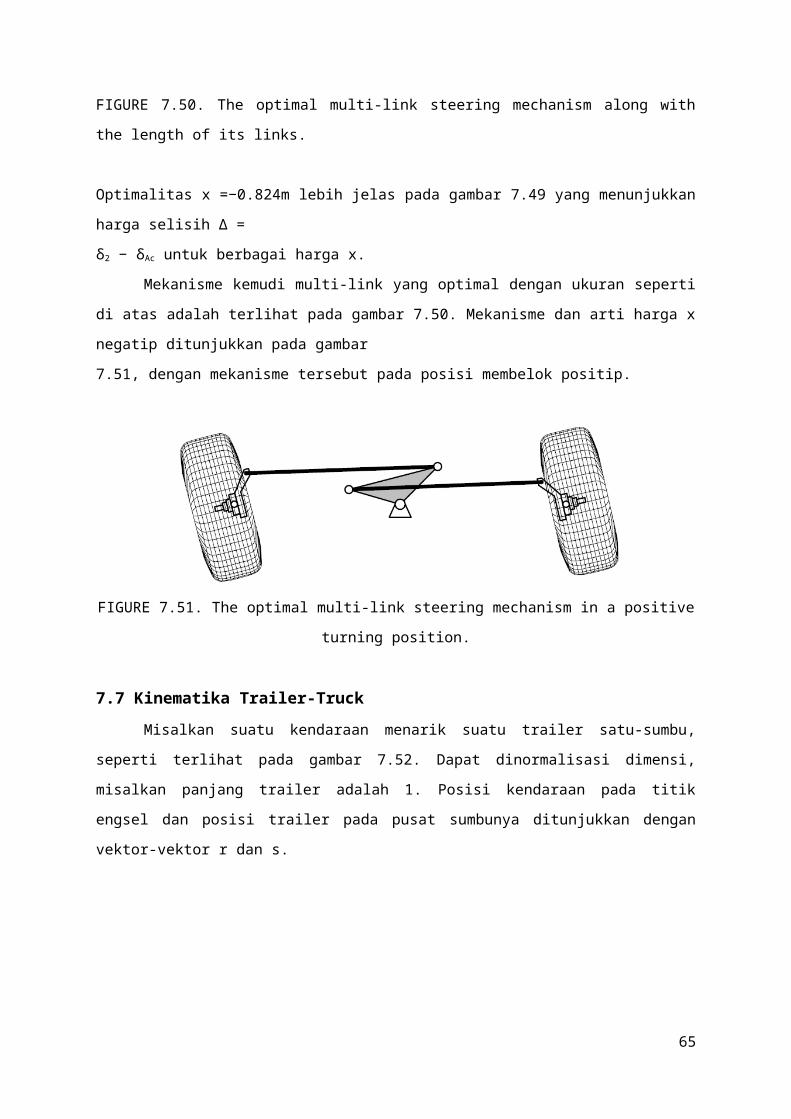
FIGURE 7.50. The optimal multi-link steering mechanism along with the length of its links.
Optimalitas x =−0.824m lebih jelas pada gambar 7.49 yang menunjukkan harga selisih Δ =
δ2 − δAc untuk berbagai harga x.
Mekanisme kemudi multi-link yang optimal dengan ukuran seperti di atas adalah
terlihat pada gambar 7.50. Mekanisme dan arti harga x negatip ditunjukkan pada gambar
7.51, dengan mekanisme tersebut pada posisi membelok positip.
FIGURE 7.51. The optimal multi-link steering mechanism in a positive turning position.
52

7.7 Kinematika Trailer-Truck
Misalkan suatu kendaraan menarik suatu trailer satu-sumbu, seperti terlihat pada
gambar 7.52. Dapat dinormalisasi dimensi, misalkan panjang trailer adalah 1. Posisi
kendaraan pada titik engsel dan posisi trailer pada pusat sumbunya ditunjukkan dengan
vektor-vektor r dan s.
FIGURE 7.52. A car pulling a one-axle trailer.
Anggap bahwa r adalah sutu fungsi waktu t yang dapat dideferensialkan, maka akan diuji
watak trailer dengan menghitung s, dan memprediksi jackknifing.
Ketika kendaraan bergerak ke depan, maka dikatakan bahwa kendaraan jackknifed bila
dengan
Suatu konfigurasi jackknifed diperlihatkan pada gambar 7.53, sedangkan gambar 7.52
adalah konfigurasi unjackknifed .
Secara matematis akan dicari kiondisi truck-trailer akan jackknife untuk sutu lintasan gerak r
= r(t) tertentu dan kondisi r(t) yang harus dipenuhi untuk mencegah jackknifing.
53
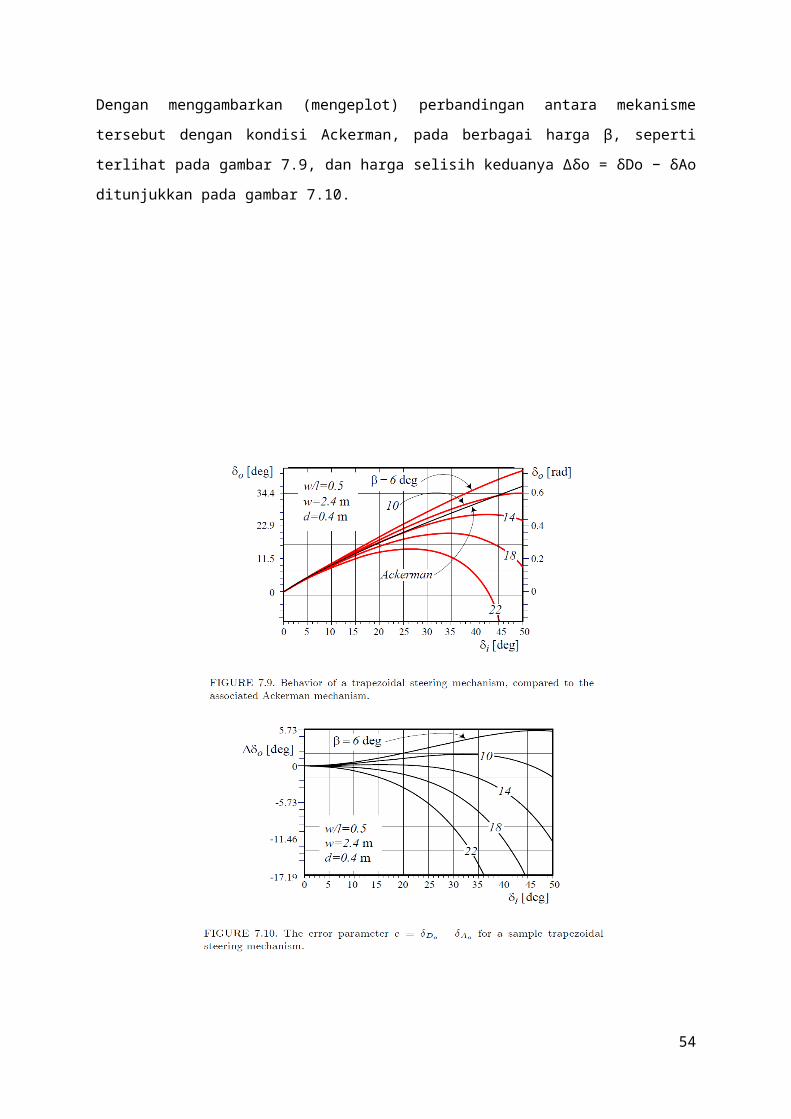
FIGURE 7.53. A jackknifed configuration of a car pulling a one-axle trailer.
Kecepatan trailer dapat diungkapkan sebagai :
dengan :
dan kondisi unjackknifing bila :
c > 0. (7.189)
Anggap bahwa r adalah lintasan kendaraan. Bila |z| = 1, dan r memiliki radius
kelengkungan R(t) > 1, dan :
kemudian
untuk semua t > 0.
Dengan demikian, kendaraan bergerak ke depan dan kombinasi car-trailer semula tidak
mengalami jackknifed, dan kemudian tetap tidak jackknifed.
Bukti
Panjang trailer yang dinormalisasi adalah 1, dan konstan, maka z adalah suatu vektor
satuan
54

dan
(r − s) · (r − s) = 1. (7.193)
Roda tanpa-slip trailer, maka terdapat konstrain vektor sedemikian sehingga vektor
kecepatan s harus mengarah sepanjang sumbu trailer, yang ditunjukkan oleh z,
Penjelasan persamaan (7.194) : c adalah harga kecepatan trailer, (r-s) vektor z
Dengan mendiferensialkan (7.193) diperoleh :
Penjelasan persamaan (7.196) : pada batang z, proyeksi kecepatan arah z pada
kedua sisi sama besar.
substitusi s dari persamaan (7.194) ke persamaan (7.196) diperoleh :
mengingat bahwa (r-s).(r-s) = 1, maka :
c : merupakan proyeksi kecepatan kendaraan pada z.
Dengan telah didapatkan c, maka persamaan (7.194) dapat dituliskan sebagai :
Ada 3 (tiga) kemungkinan, yaitu :
1. Bila c > 0, vektor kecepatan trailer s berada sepanjang sumbu trailer z. Trailer
mengikuti kendaraan dan sistem stabil.
2. Bila c = 0, vektor kecepatan trailer s sama dengan nol. Dalam hal ini, trailer
melakukan spin di sekitar pusat sumbu-rodanya (axle) dan sistem neutralstable.
3. Bila c < 0, vektor kecepatan trailer s berada sepanjang sumbu trailer −z. Trailer tidak
mengikuti kendaraan dan sistem tak-stabil
55
Dengan ungkapan menggunakan koordinat Cartesian, dapat ditunjukkan vektor posisi
kendaraan dan trailer dengan :
dan dengan demikian :
Note : r = ixc + j yc; s = ixt + jyt ; substitusikan ke persamaan vektor, akan diperoleh persamaan skalar komponen x dan y
Bila didefinisikan suatu fungsi :
dan anggap kesimpulan (7.191) benar sedangkan (7.190) benar. Pada saat t1 > 0
sedemikian sehingga f (t1) = 0 dan f’(t1) ≤ 0. Dengan menggunakan |z| = 1 dan ,
maka :
dan dengan demikian tegak lurus (t1).
Derivatif f’(t) menjadi :
56

dan dengan demikian :
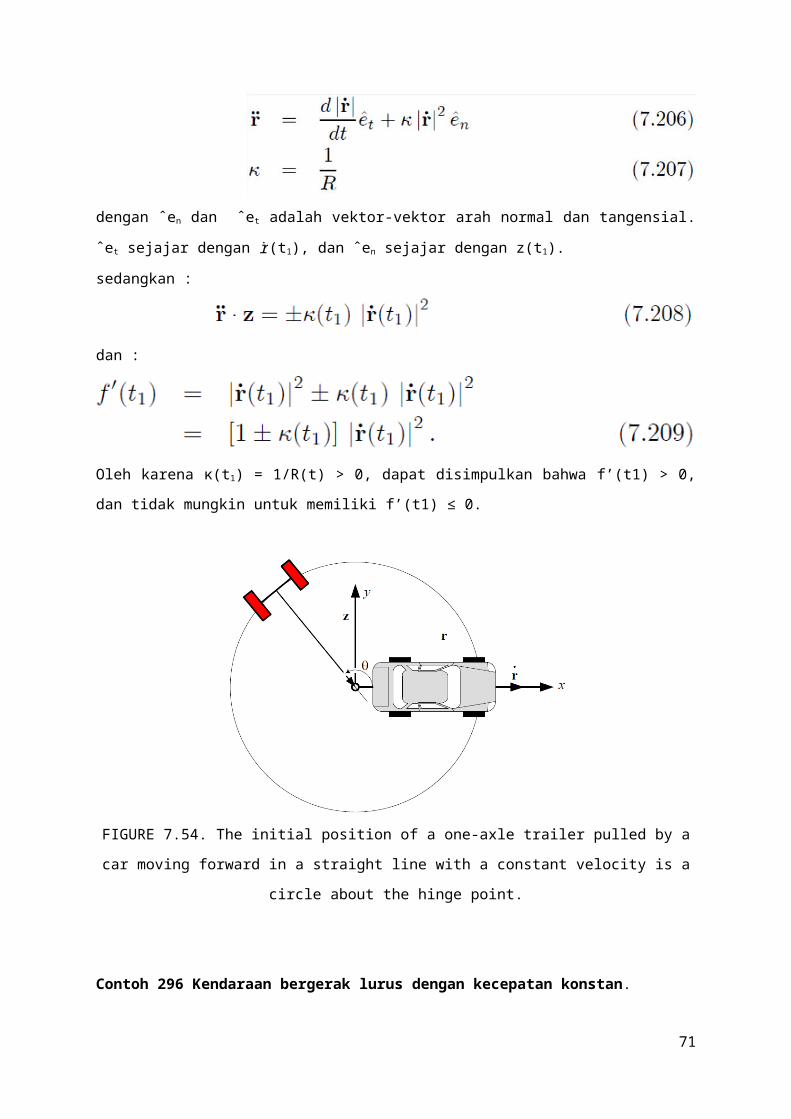
Percepatan r dalam kerangka koordinat normal-tangential coordinate frame (en, et) adalah :
dengan ˆen dan ˆet adalah vektor-vektor arah normal dan tangensial. ˆet sejajar dengan r(t1),
dan ˆen sejajar dengan z(t1).
sedangkan :
dan :
Oleh karena κ(t1) = 1/R(t) > 0, dapat disimpulkan bahwa f’(t1) > 0, dan tidak mungkin untuk
memiliki f’(t1) ≤ 0.
57

FIGURE 7.54. The initial position of a one-axle trailer pulled by a car moving forward in a
straight line with a constant velocity is a circle about the hinge point.
Contoh 296 Kendaraan bergerak lurus dengan kecepatan konstan.
Misalkan suatu kendaraan bergerak ke depan dengan lintasan garis lurus dengan
kecepatan konstan.ak dalam arah x positip, berawal dari x = 0. Dengan ungkapan
menggunakan vektor 2 dimensional diperoleh :
Oleh karena persamaan (7.192), diperoleh :
dan dengan demikian posisi mula-mula trailer harus terletak pada lingkaran satuan seperti
terlihat pada Gambar 7.54.
Dengan menggunakan vektor 2 dimensional, dapatdiungkapkan z(0) sebgai fungsi θ
dan penyederhanaan Persamaan (7.202) sebagai :
58
Persamaan (7.213) adalah suatu rangkaian persamaan diferensial orde-1 yang terkopel,
yang memiliki solusi :
Dengan menggunakan kondisi awal (7.212) diperoleh :
Bila θ ≠ kπ, kemudian ketika waktu mendekati tak terhingga, maka solusi menuju batas
secara tak asymptotis:
Ketika kendaraan bergerak dengan kecepatan konstan, solusi ini menunjukkan bahwa trailer
akan menuju posisi bergerak lurus ke depan, mengikuti kendaraan.
Dapat juga dianggap bahwa kendaraan bergerak ke belakang. Pada situasi ini solusi
menunjukkan bahwa, kecuali untuk kondisi mula-mula tak-stabil θ = π, semua solusi menuju
posisi jackknifed.
Bila θ = 0, kemudian
dan trailer bergerak dalam konfigurasi tak-stabil. Pada sebarang deviasi terhadap θ = 0 akan
berakhir untuk merubah situasi dan menuju solusi batas stabil (7.217).
Bila θ = π, maka :
59

dan trailer mengikuti kendaraan dalam konfigurasi stabil. Sebarang deviasi dari θ = 0 akan
menghilang setelah beberapa saat.
Example 297 F Straight car motion with different initial θ.
Misalkan suatu kendaraan bergerak sepanjang sumbu x dengan kecepatan konstan.
Kendaraan tersebut menarik suatu trailer, yang mula-mula pada posisi θ, seperti
diperlihatkan pada gambar 7.52. Dengan menggunakan panjang yang dinormalisasikan,
anggap bahwa jarak antara sumbu trailer dengan engsel sama dengan 1.
Bila posisi absolut kendaraan pada engsel dinyatakan dengan r,
dan posisi absolut trailer dengan :
Maka posisi trailer merupakan fungsi gerakan kendaraan.
Bila posisi kendaraan diungkapkan sebagai suatu fungsi vektor yang tergantung waktu
(time-dependent vector function) :
60

¸
Maka posisi trailer bisa diperoleh dengan menyelesaikan dua persamaan diferensial yang
saling terkopel :
Untuk kecepatan kendaraan yang uniform dan konstan
Maka persamaan (7.221) dan (7.222) dapat disederhanakan menjadi :
Persamaan (7.223) tak tergantung Persamaan (7.224), sehingga dapat diselesaikan secara
independen, diperoleh **)
Dengan mensubstitusi Persamaan (7.225) ke (7.224) menghasilkan persamaan diferensial :
dengan solusinya :
Bila trailer start dari
,
maka konstanta integral akan sama dengan persamaan (7.215) dan (7.216), dan dengan
demikian :
61

**) Catatan : untuk mencari solusi persamaan (7-223) digunakan substitusi :z = xt – tdzdt
=dxdt
−1 ; dst akan diperoleh persamaan diferensial dengan variabel terpisah
FIGURE 7.55. Trailer kinematics for a θ = 45deg starting position.
Gambar-gambar 7.55, 7.56, dan 7.57 mengilustrasikan watak trailer yang start dari θ = 450g,
θ = 900, θ = 1350.
62
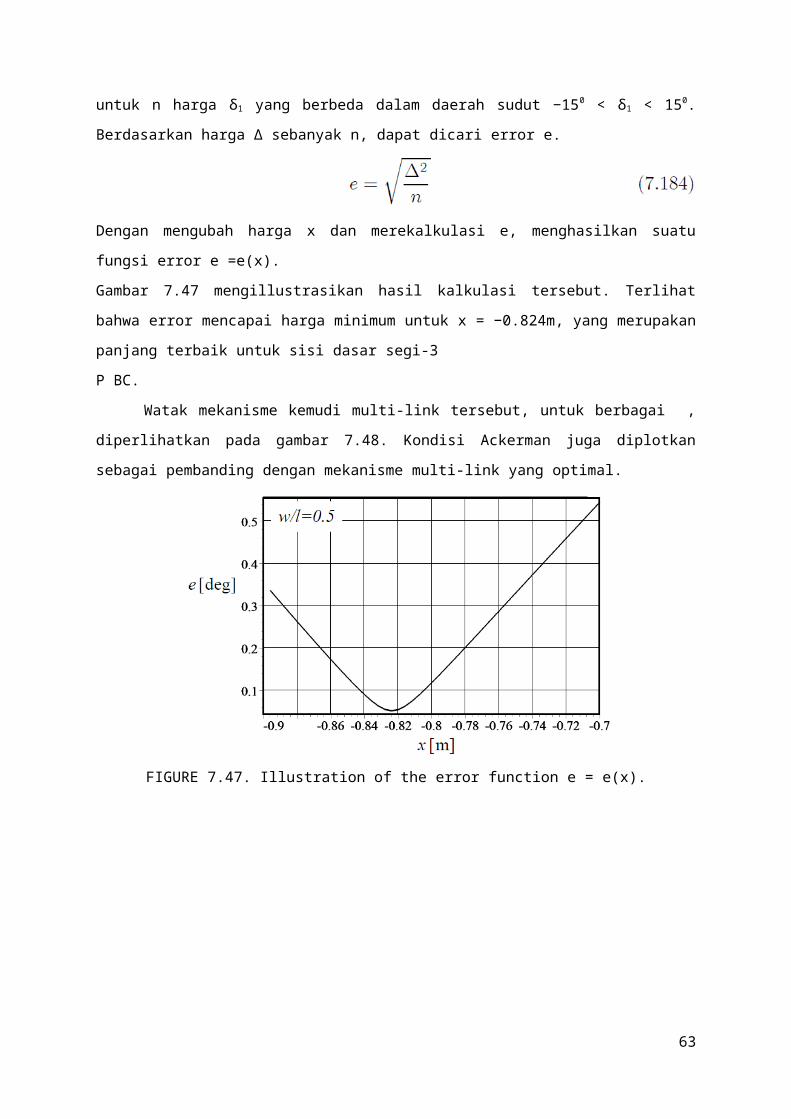
FIGURE 7.56. Trailer kinematics for a θ = 90deg starting position.
FIGURE 7.57. Trailer kinematics for a θ = 135deg starting position.
Contoh 298 Gerakan kendaraan melingkar dengan kecepatan konstan.
Misalkan suatu kendaraan menarik trailer seperti diperlihatkan pada gambar 7.52.
Kendaraan berjalan sepanjang lingkaran dengan radius R > 1, berbasis panjang yang
dinormalisasikan, yaitu dengan panjang trailer = 1. Dalam gerakan melingkar, kecepatan
anguler ω = 1 dan periode T = 2π, posisi kendaraan diungkapkan dengan fungsi vektor yang
tergantung waktu :
63

Posisi mula-mula trailer harus terletak pada lingkaran satuan dengan pusatnya pada :
Kombinasi kendaraan-trailer menuju konfigurasi steady-state seperti terlihat pada gambar
7.58.
FIGURE 7.58. Steady state configuration of a car-trailer combination.
Dengan substitusi :
64
dan dengan kondisi awal Persamaan (7.231) dalam (7.202) akan menghasilkan dua
persamaan diferensial untuk posisi trailer :
Anggap bahwa
Solusi steady-state persamaan tersebut adalah :
solutions of these equations
are
xt = c cos(t − α) (7.235)
yt = c sin(t − α) (7.236)
dengan c adalah jari-jari rotasi trailer, dan α adalah posisi anguler (sudut) trailer di belakang
kendaraan.
Solusi tersebut dapat dicek dengan menggunakan dua variabel baru, u dan v, sedemikian
sehingga :
u = xt sin t − yt cos t (7.240)
v = xt cos t + yt sin t (7.241)
dan
Dengan menggunakan variabel baru diperoleh :
xt = u sin t + v cos t (7.243)
yt = −u cos t + v sin t (7.244)
65

Dengan mendiferensialkan secara langsung dari (7.240), (7.241), (7.243), dan (7.244)
ternyata bahwa :
dan dengan demikian, persoalan tersebut dapat diungkapkan dengan susunan persamaan
baru :
Pada kondisi steady-state, diferensial terhadap waktu harus sama dengan nol, dan dengan
demikian solusi kondisi steady-state merupakan jawaban persamaan aljabar berikut :
Terdapat tiga pasang solusi :
Solusi pertama adalah dalam keadaan s = 0,
xt = 0 (7.258)
yt = 0 (7.259)
yang menunjukkan bahwa pusat sumbu trailer tetap berada di titik asal (O) dan kendaraan
berputar pada lingkaran R = 1. Ini adalah gerakan stabil.
Solusi kedua berhubungan dengan :
yang ekivalen dengan (7.235) dan (7.236).
Untuk menguji stabilitas solusi kedua, disubstitusikan suatu solusi yang terganggu :
66

ke dalam persamaan gerakan yang dilinierkan (7.251) dan (7.252) pada susunan solusi
kedua :
untuk memperoleh dua persamaan untuk fungsi yang terganggu p dan q.
Pasangan persamaan yang terganggu dapat disusun dalam bentuk matriks :
Stabiliotas Persamaan (7.268) dicari dengan eigenvalues λi dari koefisien matriks, yaitu :
λ1 = −c
λ2 = −2c.
Karena kedua eigenvalues λ1 dan λ2 berharga negatip, maka solusi persamaan yang
terganggu adalah simtomatis dan menuju ke nol. Dengan demikian, pasangan solusi yang
ke dua (7.256) stabil dan menyerap sebarang lintasan di dekatnya yang mulai
mendekatinya.
Solusi ke tiga adalah berhubungan dengan :
Persamaan gerakan yang dilinierkan pada pasangan solusi ke tiga (7.257) adalah :
Tpersamaan yang terganggu akan menjadi :
67
dengan eigenvalues positip :
λ1 = c
λ2 = 2c
Eigenvalues positipmenunjukkan bahwa solusi persamaan yang terganggu adalah divergen
dan menuju ke tak terhingga. Dengan demikian pasangan solusi (7.257) adalah tidak stabil
dan repels sebarang lintasan di dekatnya yang mendekatinya.
7.8 Ringkasan
Pengemudian diperlukan sebagai panduan suatu kendaraan untuk menuju arah yang
dikehendaki. Ketika kendaraan membelok, roda yang lebih dekat dengan pusat rotasi
dinamakan roda dalam (inner wheels), dan roda yang lebih jauhdengan pusat rotasi
dinamakan roda luar (outer wheels). Bila kecepatan kendaraan sangat lambat, ada kondisi
kinematis antara roda dalam dan roda luar yang dikemudikan, dinamakan kondisi Ackerman.
Kendaraan jalan raya adalah kendaraan 4-roda dan biasanya berkemudi roda depan (front-
wheel-steering).
Kondisi kinematis antara roda dalam dan roda luar yang dikemudikan adalah :
δi : sudut belok roda dalam
δo : sudut belok roda luar
w : track, dan l : wheelbase.
Track w dan wheel base l merupakan lebar dan panjang kinematis kendaraan.
Pusat massa kendaraan yang dikemudikan akan membelok secara melingkar dengan radius
dengan δ sudut rata-rata cotangen antara sudut-sudut roda dalam dan roda luar :
Sudut δ adalah sudut belok ekivalen dari sepeda yang memiilki wheelbase l dan radius
rotasi R yang sama.
68

Exercises
1. Bicycle model and radius of rotation.
Mercedes-Benz GL450T M has the following dimensions.
l = 121.1 in
wf = 65.0 in
wr = 65.1 in
R = 39.7 ft
Assume a1 = a2 and use an average track to determine the maximum
steer angle δ for a bicycle model of the car.
2. Radius of rotation.
Consider a two-axle truck that is offered in different wheelbases.
l = 109 in
l = 132.5 in
l = 150.0 in
l = 176.0 in
If the front track of the vehicles is
w = 70in
and a1 = a2, calculate the radius of rotations if δ = 30deg.
3. Required space.
Consider a two-axle vehicle with the following dimensions.
l = 4m
w = 1.3m
g = 1.2m
Determine Rmin, RMax, and ΔR for δ = 30deg.
4. Rear wheel steering lift truck.
A battery powered lift truck has the following dimensions.
l = 55in
w = 30in
Calculate the radius of rotations if δ = 55deg for a1 = a2.
5. Wheel angular velocity.
Consider a two-axle vehicle with the following dimensions.
l = 2.7m
w = 1.36m
69

What is the angular velocity ratio of ωo/ωi?
6. A three-axle vehicle.
A three-axle vehicle is shown in Figure 7.17. Find the relationship
between δ2 and δ3, and also between δ1 and δ6.
7. A three-axle truck.
Consider a three-axle truck that has only one steerable axle in front.
The dimensions of the truck are
a1 = 5300mm
a2 = 300mm
a3 = 1500mm
w = 1800mm.
Determine maximum steer angles of the front wheels if the truck is
supposed to be able to turn with R = 11m.
8. A vehicle with a one-axle trailer.
Determine the angle between the trailer and vehicle with the following
dimensions.
a1 = 1000mm
a2 = 1300mm
wv = 1500mm
b1 = 1200mm
b2 = 1800mm
wt = 1100mm
g = 800mm
δi = 12deg.
What is the rotation radius of the trailer Rt, and the vehicle R?
Determine minimum radius Rmin, maximum RMax, and difference
radius ΔR?
9. F Turning radius of a 4W S vehicle.
Consider a F W S vehicle with the following dimensions.
70
Determine the turning radius of the vehicle for δf l = 5deg.
What should be the steer angles of the front and rear wheels to decrease
10% of the turning radius, if we make the vehicle 4W S?
10. F Coordinates of the turning center.
Determine the coordinates of the turning center for the vehicle in
Exercise 9 if δf l = 5deg and c1 = 1300mm.
11. F Different front and rear tracks.
Lotus 2-ElevenT M is a RW D sportscar with the following specifications.
Determine the angular velocity ratio of ωo/ωi, R, δi, and δo for δ = 5deg.
12. F Coordinates of turning center.
Determine the coordinates of turning center of a 4W S vehicle in terms of outer steer angles
δof and δor.
13. F Turning radius.
Determine the turning radius of a 4W S vehicle in terms of δr.
71
14. F A three-axle car.
Consider a three-axle off-road pick-up car. Assume
a1 = 1100mm
a2 = 1240mm
a3 = 1500mm
w = 1457mm
and determine δo, R1, Rf, and R if δi = 10deg.
15. F Steering mechanism optimization.
Find the optimum length x for the multi-link steering mechanism shown in Figure 7.59 to
operate as close as possible to the kinematic steering condition. The vehicle has a track w =
2.64m and a wheelbase l = 3.84m, and must be able to turn the front wheels within a
working range equal to −22 deg ≤ δ ≤ 22 deg.
FIGURE 7.59. A multi-link steering mechanism tha must be optimized by varying x.
72
Top Related