






Languages
Pages
Legal

Elenco dei simboli più importanti
Elenco dei simboli più importanti
SIMBOLO SIGNIFICATO= uguale≠ diverso (disuguale)≃ circa uguale< minore> maggiore≤ minore o uguale≥ maggiore o uguale± più o meno
∣a∣ valore assoluto (modulo) di a: a2=∣a∣={ a , se a≥0−a , se a0
Insiemi
∈ appartiene∉ non appartiene∃ esiste (ovvero ∃ è il quantificatore esistenziale)∀ per ogni (ovvero ∀ è il quantificatore universale)
Insiemi numericiℕ Numeri interi positivi o numeri naturaliℤ Numeri interi relativiℚ Numeri razionaliℝ Numeri reali
Operazioni insiemistiche
∪ Unione
∩ Intersezione
Relazioni insiemistiche
⊆ È contenuto o è uguale a... (concetto di sottoinsieme)
⊂ È contenuto in ...
⊇ Contiene o è uguale a... (concetto di soprainsieme)
⊃ Contiene...
∅ Insieme vuoto (cioè ∅ è l'insieme che non contiene alcun elemento)
Logica∨ o (inclusivo), vel, or (disgiunzione inclusiva)∧ e, et, and (congiunzione)
⇒ oppure se…allora… oppure: implica (deduzione)⇔ se e solo se
- 1 di 54 -

Proprietà delle potenze e alcune formule algebriche più importanti
Proprietà delle potenze e alcune formule algebriche più importantiProprietà delle potenze
Siano a ∈ℝed n ∈ℤ. Ricordiamo, anzitutto, le seguenti definizioni: 1) se n > 1, si chiama potenza ennesima (o n-ma) del numero reale a, il prodotto di n
fattori uguali ad a, cioè:an= a⋅a⋅a⋅. . . . . .⋅a ⏟
n volte
2) se n=1, si pone: a1=a ;3) se n=0 e a≠0 , si pone: a0=1;
4) se n0 e a≠0 , si pone: an= 1
a−n.
Dalle definizioni date segue che le proprietà delle potenze a esponente intero dei numeri razionali, valgono anche per le potenze a esponente intero dei numeri reali.Cioè, se a ,b∈ℝ ed m ,n∈ℤ , risulta:
P1) am⋅an=amn ; P2) am :an=am−n ;
P3) am n =amn ; P4) a⋅b n=an⋅bn;
P5) ab n
= an
bn.
Elenco di alcune formule algebriche più importantiDati a , b e c∈ℝ si può provare facilmente che valgono le seguenti identità:
FA1) Differenza fra quadrati: a2−b2= a−b ⋅ ab ;FA2) Quadrato di un binomio: a±b 2=a2±2 abb2;
FA3) Cubo di un binomio: a±b 3=a3±3 a2 b3 a b2±b3 ;
FA4) Somma e differenza fra cubi: a3±b3= a±b ⋅ a2∓abb2 ;FA5) Quadrato di un trinomio: abc 2=a2b2c22 a b2 a c2 b c .
N.B. Nell'insieme dei numeri reali ℝ la somma di quadrati a2b2non si può scomporre.
Tuttavia, esistono delle formule, utili in determinati casi, che consentono una fattorizzazione particolare di un gruppo di polinomi di questo tipo ed esattamente:
1. a2+ b2
= (a±b )2∓2 a b 2. a4+ b4
=(a2±b2 )2∓2a2 b2 e, in generale:
3. ∀n∈ℕ si ha: a2n+ b2n=(an±bn )2∓2 anbn
- 2 di 54 -

I sistemi di equazioni di primo grado
I sistemi di equazioni di primo grado
Innanzitutto ricordiamo che la forma normale (o canonica) di un sistema in due equazioni di primo grado è la seguente:
{a xb y=ca ' xb' y=c '
dove a, b, c, a', b' e c'∈ ℝ e x e y rappresentano le incognite. Tuttavia, se il sistema assegnato non fosse scritto in forma normale, con le operazioni di m.c.m., somme fra monomi simili, semplificazioni ecc..., è sempre possibile riuscire a riscriverlo nella forma algebrica migliore possibile per applicare uno dei metodi risolutivi illustrati nei paragrafi seguenti.
I. Metodo di sostituzioneDopo aver effettuato tutte le operazioni presenti nel sistema e ridotto i monomi simili, si isola un'incognita da una delle due equazioni, ossia si ricava un’incognita in funzione dell’altra seguendo possibilmente il consiglio di isolare quell'incognita il cui coefficiente numerico è più prossimo ad 1. Poi, se la variabile isolata si trova al membro di sinistra dell'uguaglianza, sostituiamo l'espressione che è al membro di destra, nella restante equazione che, riducendosi ad una sola variabile, si risolve facilmente.Infine il valore dell’incognita così ottenuto lo sostituiamo nell’equazione in cui l’altra incognita era stata isolata.Esempio svolto:
{3 x−6 4
4 y−7 5
= x410
− y−34
2 x3
− y12
=3 x−1 5
−5 y112
calcoliamo il m.c.m:
{15 x−6 16 y−7 20
=2 x4 −5 y−3 20
40 x−30 y1 60
=36 x−1 −5 5 y1 60
eliminiamo i denominatori:
{15 x−9016 y−112=2 x8−5 y1520 x −30 y−30=36 x−36−25 y−5
isoliamo le incognite dalle costanti:
{15 x−2 x16 y5 y=9015811240 x−36 x−30 y25 y=−36−530
semplifichiamo e scriviamo il sistema in forma normale:
{13 x21 y=2254 x−5 y =−11
isoliamo x nella seconda equazione:
{13 x21 y=225
x=5 y−114
sostituiamo nella prima equazione
- 3 di 54 -

I sistemi di equazioni di primo grado
{13(5 y−114 )+ 21 y=225
x=5 y−11
4
.
Osserviamo che nella prima equazione abbiamo una sola incognita: risolviamo allora rispetto ad essa:
{65 y−14384 y=900
x=5 y−114
⇒ {149 y=1043
x=5 y−114
⇒{y=1043149
=7
x=5 y−114
infine sostituiamo il valore di y così determinato nella seconda equazione per trovare x:
{y=7
x=5⋅7−114
=244
=6
e la soluzione, riscritta in forma ordinata, è:
{x=6y=7
.
II. Metodo di somma o sottrazione o metodo di riduzione
Dopo aver effettuato tutte le operazioni presenti nel sistema, ridotto i monomi simili e posto il sistema nella forma canonica,
1. si individua il minimo comune multiplo dei coefficienti di un’incognita2. si trova il fattore che consente di ottenere tale m.c.m. (e il suo opposto) per
l’incognita considerata3. si sommano algebricamente in colonna le due equazioni: in questo modo scompare
un’incognita4. si risolve l’equazione così ottenuta ad una sola incognita5. a scelta si può ripetere il procedimento per l’eliminazione dell’altra incognita
oppure effettuare il metodo di sostituzione.Esempio svolto (riprendendo l'esempio del numero I):
{13 x21 y=225, chiamiamo ( 1 ) la prima equazione4 x−5 y=−11 , chiamiamo ( 2 ) la seconda equazione
Procediamo cercando di eliminare la x: il m.c.m. tra 13 e 4 è 52, perciò moltiplichiamo la prima equazione per 4 e la seconda per 13 (queste moltiplicazioni sono ammesse in virtù del secondo principio di equivalenza per le equazioni) e poi eseguiremo la sottrazione membro a membro. Conveniamo di indicare questa operazione con la seguente notazione:
4 1 −13 2 dove 1 e 2 indicano, rispettivamente come scritto sopra, la prima e la seconda equazione del sistema e conseguentemente:
{4 13 x21 y =4⋅22513 4 x−5 y =13⋅−11
Per eliminare la y è sufficiente eseguire la sottrazione membro a membro ovvero:
{52 x84 y=90052 x−65 y=−143
⇒ {52 x84 y=90052 x−65 y=−143
__________________________________
52 x−52 x84 y65 y=900143
⇒ 149 y=1043⇒ y=7
In maniera del tutto equivalente, eseguiamo l'operazione:5 1 21 2
allo scopo, stavolta di eliminare la y:
- 4 di 54 -

I sistemi di equazioni di primo grado
{5 13 x 21 y =5⋅22521 4 x−5 y =21⋅−11
⇒ {65 x105 y=112584 x−105 y=−231
__________________________________
65 x84 x105 y−105 y=1125−231
⇒ 149 x=894⇒ x=6
Quindi la soluzione è:{x=6y=7
.
III. Metodo del confrontoÈ un'applicazione della proprietà transitiva dell'uguaglianza che afferma che se A=B e B=C allora A=C. Infatti, se il sistema è ridotto alla forma normale, isoliamo la
stessa incognita in entrambe le equazioni e, poi (in virtù della proprietà transitiva dell'uguaglianza), uguagliamo le espressioni situate ai membri di destra.Si ottiene così un’equazione in una sola incognita (per es. x), facilmente risolvibile.Allo scopo di individuare il valore dell'altra incognita (la y), sostituiamo il valore ottenuto (di x) in una delle due equazioni di partenza e così riusciamo ad ottenere la soluzione completa.Esempio svolto (riprendendo ancora l'esempio del numero I):
{13 x21 y=2254 x−5 y =−11
isoliamo x da entrambe le equazioni:
{x=225−21 y13
x=5 y−114
uguagliamo i due membri di destra:225−21 y
13= 5 y−11
4⇒ 900−84 y
52=65 y−143
52eliminiamo i due denominatori e risolviamo rispetto ad y:
−65 y −84 y=−900−143 ⇒−149 y=−1043 ⇒ y=−1043−149
=7
Adesso, isoliamo y da entrambe le equazioni ed uguagliamo ancora i due membri di destra:
{y=225−13 x21
y=114 x5
⇒ 225−13 x21
=114 x5
calcoliamo il m.c.m (=110), eliminiamo i due denominatori e risolviamo rispetto ad x :
1125−65 x=23184 x ⇒−65 x−84 x=231−1125⇒−149 x=−894 ⇒ x=−894−149
⇒ x=6
Quindi la soluzione è: {x=6y=7
.
IV. Metodo di Cramer o delle matrici
Consideriamo ancora un sistema ridotto alla forma normale: {a xb y=ca ' xb' y=c '
.
Siano delta, delta x, delta y, rispettivamente, le seguenti espressioni:
=∣a ba ' b '∣=a⋅b '−a '⋅b , x=∣c b
c ' b '∣=c⋅b '−c '⋅b e y=∣a ca ' c '∣=a⋅c '−a '⋅c.
Se ≠0 le soluzioni si trovano calcolando:
x=x
e y=
y
Esempio svolto (riprendendo un'ultima volta l'esempio del numero I):
- 5 di 54 -
I sistemi di equazioni di primo grado
{13 x21 y=2254 x−5 y=−11
=∣13 214 −5∣=13⋅−5 −4⋅21=−65−84=−149 ,
x=∣225 21−11 −5 ∣=225⋅−5 11⋅21=−1125231=−894 e
y=∣13 2254 −11 ∣=13⋅−11 −4⋅225=−143−900=−1043
⇒{ x=x
=−894
−149=6
y= y
=−1043
−149=7
- 6 di 54 -

Definizione e proprietà dei radicali
Definizione e proprietà dei radicali
Definizione: dati tre elementi a ∈ℝ+ e m ,n∈ℕ si definisce radicale di indice m e radicando an la
potenza anm ed esattamente:
anm =
DEF.
man .
Quindi per poter svolgere agevolmente qualunque operazione con i radicali sarà necessario applicare correttamente le proprietà delle potenze. Intanto ricordiamo che:
Se n è numero intero pari Se n è numero intero disparina=b significa a=bn
se a, b sono numeri reali positivi o nulli
na=b significa a=bn
se a, b sono numeri reali positivi, negativi o nulliEsempi:9=3 ; mentre −9 non esiste;
327=3 e 3−27= -3 .
Operazioni:Semplificazione: nan=a ; ad esempio
454=5 .
n⋅pam⋅p=nam ; esempio: 14a30=7a15 ; poiché si semplifica la frazione:
3014
= 157 .
Somma di radicali: si esegue solo se i radicali sono simili : an xb
n x= ab n x ;Esempio: 2 25 2=7 2 ; mentre non si può calcolare: 2 352 .
Prodotto di radicali: si esegue solo se gli indici delle radici sono uguali:n xm⋅
n y p=n x m y p .
Esempio 1:na x⋅mb y=
pa x⋅ p
n b
y⋅pn
; dove con p si è indicato il m.c.m.(n, m);
Esempio 2:325⋅435=
3⋅4 25 4⋅
4⋅ 3 35 3=12 220⋅315 .
Quoziente di radicali: si esegue solo se gli indici delle radici sono uguali:n xm :
n y p=n xm: y p .
Esempio 1: na x:mby=
pa x⋅p
n : b
y⋅ pn
= p a x⋅ p
n
b y⋅ p
n ; dove con p si è indicato il m.c.m.(n, m)
Esempio 2:325:
435=3⋅4 25 4 :
4⋅ 3 353=12 220
315.
Trasporto di fattori sotto il segno di radice: an bm=
nbm⋅an ; es.: 3⋅354=
354⋅ 33 ;
Trasporto di fattori fuori dal segno di radice:nbm⋅an=a
n bm ; es.: a6⋅b3=a6⋅b21=a3⋅b⋅b .
Potenza di radicali: na m= nam ; Esempio: 43 3= 433 .
Radice di radice: m na= m⋅n a ; Esempio:
467= 4⋅ 6 7=247 .Razionalizzazione del denominatore. Esaminiamo tre casi:
1. a
b= a
b⋅b
b= a b
b; 2.
abc
= abc
⋅b−cb−c
= a b−c b−c
;
3. a
nbm= a
nbm⋅
nbn−m
nbn−m= a⋅
nbn−m
nbm n−m= a⋅
nbn−m
nbn= a⋅
nbn−m
b.
Radicali doppi:vale la seguente identità (utile se la quantità (a2 - b) è un quadrato):
a±b= aa2−b2
± a−a2−b2
.
Esempio: 23= 222−32
2−22−32
= 212
2−12
= 32
12
.
- 7 di 54 -

Formula risolutiva dell'equazione algebrica di secondo grado e fattorizzazione del trinomio di 2°
Formula risolutiva dell'equazione algebrica di secondo grado e fattorizzazione del trinomio di 2°
Un’equazione algebrica di secondo grado (=2°) è un oggetto algebrico che, scritto nella forma completa, si può rappresentare così:
ax 2bxc=0 dove a , b e c∈ℝ e a≠0 .Possiamo facilmente provare che le soluzioni possono essere scritte nella seguente forma:
x=−b±b2−4 ac2a
Adesso conveniamo di chiamare il radicando del radicale che compare nella formula risolutiva discriminante dell’equazione di 2° ponendolo, per comodità, uguale a (si legge: delta) e cioè:
Δ=b2−4 ac .Per classificare le due soluzioni dobbiamo considerare tre casi (in base alle variazioni del segno di ):
1) 0. Allora la è un numero reale e abbiamo due soluzioni x1 , x2 reali e distinte
x1 ≠x2 2) =0. Allora la è uguale a 0 e abbiamo due soluzioni x1 , x2 reali ma coincidenti
x1 =x2 3) 0. Allora la non è un numero reale e l’equazione completa ax 2bxc=0 non ha
soluzioni reali.
Esempio:risolviamo l’equazione: 2 x 2−9 x−5=0 .
Innanzitutto si ha: {a=2b=−9c=−5
. Applichiamo la formula e otteniamo:
x=−b±b2−4 ac2a
= 9±81−4 2 −5 4
= = 9±1214
=9±114
.
Allora: x1 = 9114
=204
=5 e x2== 9−114
=− 24
=−12
.
Troviamo un'applicazione di questa formula nella fattorizzazione a coefficienti reali del trinomio di secondo grado a x2b xc . A questo proposito è facile dimostrare che vale la seguente identità:(1) a x2b xc =
≥0
a x− x1 x−x2 dove x1 e x 2 sono le soluzioni reali dell'equazione algebrica associata al trinomio e cioè le soluzioni
dell'equazione: ax 2bxc=0 .
Esempio:
Consideriamo il trinomio: − 12
x2−3 x2 .Troviamo le soluzioni dell'equazione algebrica asso-
ciata: −12
x2−3 x2=0 ⇒ x =3±94−1
=−3±13 . Applicando la formula (1) possiamo quindi
fattorizzare il trinomio e esattamente:
−12
x2−3 x2=−12
x−3−13 ⋅ x− 313 .
- 8 di 54 -

Formule più importanti di trigonometria
Formule più importanti di trigonometria
È assegnato un triangolo rettangolo ABC
disegnato in fig. 1:
fig. 1Le funzioni trigonometriche dell'angolo x sono definite così:
1. sen x= ac
=cateto oppostoipotenusa
2. cos x= bc
=cateto adiacenteipotenusa
3. tanx= sen xcos x
= ab
=cateto oppostocateto adiacente
4. cotan x= cos xsen x
= ba
=cateto adiacentecateto opposto
5. sec x= 1cos x
= cb
= ipotenusacateto adiacente
6. cosec x= 1sen x
= ca
= ipotenusacateto opposto
Relazione fondamentale:7. ∀ x∈ℝ si può dimostrare che vale la seguente identità:
sen2 xcos2 x=1
da cui: sen x=±1−cos2 x e cos x=±1−sen2 xFormule di addizione e sottrazione:
8. Qualunque siano i due numeri α e β∈ℝ valgono le seguenti identità:
sen α±β =senα⋅cosβ±senβ⋅cos αcos α±β =cos α⋅cosβ∓senα⋅senβ
tan α±β = tanα±tanβ1∓tan α⋅tanβ
Formule di bisezione:9. Qualunque sia α∈ℝ valgono le seguenti identità:
senα2
=± 1−cosα2
, cosα2
=± 1cos α2
Relazioni tra gli elementi di un triangolo qualsiasiI due seguenti teoremi si utilizzano quando di un triangolo qualsiasi dobbiamo determinare lati e angoli. Per i due teoremi che seguono facciamo riferimento alla fig. 2
A
B
αb
a
c
β γC
fig. 2Teorema dei seni (o di Eulero)Enunciato:
in un triangolo qualsiasi le misure dei lati sono proporzionali ai seni degli angoli opposti e cioè,facendo riferimento alla fig. 2, si ha:
- 9 di 54 -
A C
B
xb
ac

Formule più importanti di trigonometria
asen α
= bsenβ
= csen γ
Esempi di applicazione del teorema dei seni:
1) α=30 ° , β=45 ° , a=16 u. ⇒ sen 30 °16u .
= sen 45 °b
⇒ b=16u.⋅22
⋅12
≈22.62u. ;
2) α=40 ° , b=15u. , a=25u.⇒sen40 °
25u.=
senβ15u.
⇒ senβ≈0.38 .
Teorema del coseno (o di Carnot)Enunciato:in un triangolo qualsiasi, il quadrato della misura di ogni lato è uguale alla somma dei quadrati delle misure degli altri due lati, diminuita del doppio prodotto delle misure di questi due lati per il coseno dell’angolo fra essi compreso e cioè, facendo ancora riferimento alla fig. 2, si ha:
1. a2=b2c2−2 b⋅c⋅cos α2. b2=a2c2−2 a⋅c⋅cos β3. c2=a2b2−2a⋅b⋅cos γ
Esempio di applicazione del teorema del coseno
γ=60°, a=5u., b=8u.⇒c2=a2b2−2abcos60°=25u.264u.2−2⋅5u.⋅8u.⋅12
=49u.2;
per cui:
c=7u. , a=5u. , b=6u.⇒ dal teorema precedente si ha:a
senα= c
sen γ⇒ senα
a=sen γ
c⇒ senα=a⋅sen γ
c⇒
senα=5u.⋅ 3
27u.
= 514
3≃0 .61 ⇒α≃37° ,59 .
- 10 di 54 -

Formule riguardanti la retta e alcune coniche in un piano cartesiano
Formule riguardanti la retta e alcune coniche in un piano cartesiano
Nel seguito useremo queste notazioni: P0≡ x0 , y0 , P1≡ x1 , y1 e P2≡ x2 , y2 per indicare i punti P0 , P1 e P2
1. Formula della distanza fra due punti: P1P2= x2−x1 2 y2− y1 2
2. Punto medio M del segmento di estremi i punti P1 e P2: M≡ x1 x2
2,
y1 y2
2 3. Equazione della retta r passante per due punti distinti: r :
x−x1
x2−x1
=y− y1
y2− y1
3a) se x1= x2⇒ la retta è parallela all'asse y e ha equazione: x=cost. 3b) se y1= y2⇒ la retta è parallela all'asse x e ha equazione: y=cost.
3c) il coefficiente angolare si indica con m e si pone: m=y2− y1
x2−x1
=tanα e
α=arctan (m ) (=tan−1 (m ) )Oss: La dimostrazione è a questa pagina.
4. Equazione della retta r in forma esplicita: r : y=mx p
5. Equazione della retta r in forma implicita: r : axbyc=0
6. Equazione del fascio di rette passanti per il punto P0: y− y0=m x− x0 7. Per disegnare il grafico di una retta è necessario determinare esattamente due punti
appartenenti alla retta stessa: se la retta è scritta in forma esplicita y=mx p allora conviene determinare le coordinate di questi punti assegnando prima il valore 0 alla x, calcolare il corrispondente valore di y e poi il valore 1 e poi calcolare il corrispondente valore di y come descritto nella seguente tabella:
x y
0 p
1 m+p
Se la retta è assegnata in forma implicita, e cioè: axbyc=0 allora, per determinare i due punti, è sufficiente assegnare prima alla x il valore 0, calcolare il corrispondente valore di y e poi il valore 0 ad y e poi calcolare il corrispondente valore di x come descritto nella seguente tabella:
x y
0 − cb
− ca
0
Qualora nell'equazione implicita il termine noto fosse 0 ad es. r : y=x , allora basterà eseguire una variazione nei valori scelti come illustrato dalla seguente tabella:
- 11 di 54 -

Formule riguardanti la retta e alcune coniche in un piano cartesiano
x y
0 − cb
1 −cab
Nel seguito faremo riferimento alle rette r e s di equazioni: r : y=mr x pr e s : y=m s x ps
8. Condizione di parallelismo fra rette: due rette, r e s, sono parallele e si scriverà r // s se i loro coefficienti angolari sono uguali ovvero se:
mr=ms
9. Condizione di perpendicolarità fra rette: due rette, r e s, sono perpendicolari e si scriverà
r ┴ s se il prodotto dei loro coefficienti angolari è −1 ovvero se:mr⋅m s=−1
10. Il punto d'intersezione P fra due rette non parallele r e s :
P=r∩s={y=mr x pr
y=ms x ps
11. Formula della distanza fra un punto P0e una retta di equazione implicita r : axbyc=0
d=∣a x0b y0c∣
a2b2
Oss.La dimostrazione è a questa pagina.
12. Angolo formato fra due rette: Consideriamo le rette r e s che si intersecano nel punto P e i due angoli β opposti al vertice P: β è l'angolo formato dalle due rette r e s e si scriverà β=r̂s . Il grafico disegnato nel riquadro illustra la situazione geometrica.È facile dimostrare che vale la seguente uguaglianza:
α s=αr+ β
ovvero:β=αs−αr
e, quindi:tan β =tan αs−αr
e dalla formula di sottrazione della tangente si ha:
tan β =tan αs−αr = tan αs−tan αr
1tanαs⋅tanαr
.
Ricordando che tan αs =ms e tan αr =mr , sosti-tuendo si ottiene la formula che calcola la tangente dell'angolo formato fra le due rette ed esattamente:
tan (β )=ms−mr
1+ ms⋅mr
e, applicando tan−1 ad entrambi i membri, si ottiene l'angolo:
β=tan−1( ms−mr
1+ m s⋅mr) .
Formule riguardanti le coniche– CIRCONFERENZA
Definizione: una circonferenza è costituita da un insieme di punti di un piano equidistanti da un punto fisso, C, chiamato centro. La distanza di un punto qualunque della circonferenza dal centro si chiama raggio.
- 12 di 54 -
r O x
y
s
αr αs
β
β
P=r∩s

Formule riguardanti la retta e alcune coniche in un piano cartesiano
Equazione cartesiana di una circonferenza: Γ : x2 y2axbyc=0
Centro di una circonferenza: C≡− a2
, − b2
Raggio di una circonferenza: r= a2
4 b2
4−c
Equazione cartesiana di una circonferenza con il centro nell'origine e raggio r: Γ : x2 y2−r2=0 ovvero: Γ : x2 y2=r2
Equazione cartesiana di una circonferenza con il
centro sull'asse x e cioè nel punto C≡− a2
, 0: Γ : x2 y2axc=0
Equazione cartesiana di una circonferenza con il
centro sull'asse y e cioè nel punto C≡0 , − b2 : Γ : x2 y2byc=0
– PARABOLADefinizione: una parabola è costituita da un insieme di punti di un piano equidistanti da un punto fisso, F, chiamato fuoco e da una retta, d, chiamata direttrice.
Equazione cartesiana di una parabola che ha l'asse di simmetria // all'asse y: P: y =a x2b xc
Coordinate del Vertice: V≡− b2 a
, − b2−4ac4a ≡− b
2a, −
4a
ricordando che: =b2−4 ac
Coordinate del Fuoco: F≡− b2 a
, 1−
4a Equazione cartesiana della retta direttrice: d : y=−
14 a
Equazione cartesiana dell'asse di simmetria: x=− b2a
Equazione cartesiana di una parabola che ha l'asse di simmetria // all'asse x: P: x=a y2b yc
– Mutue posizioni di una circonferenza (o parabola) ed una retta:Una retta ed una circonferenza (o parabola) possono essere:1) secanti e, in questo caso, esistono due punti di intersezione, S1 e S2, fra la cir-
conferenza (o parabola) e la retta s2) tangenti e, in questo caso, esiste un punto di intersezione, T, fra la circonferenza (o
parabola) e la retta t3) esterne e, in questo caso, NON esistono punti di intersezione fra la circonferenza (o
parabola) e la retta e.Tutto ciò è riassunto graficamente nelle figg. 1 e 2.
- 13 di 54 -
Formule riguardanti la retta e alcune coniche in un piano cartesiano
t
O x
y
s e
T S1
S2
Γt
O x
ys e
T
S1S2
P
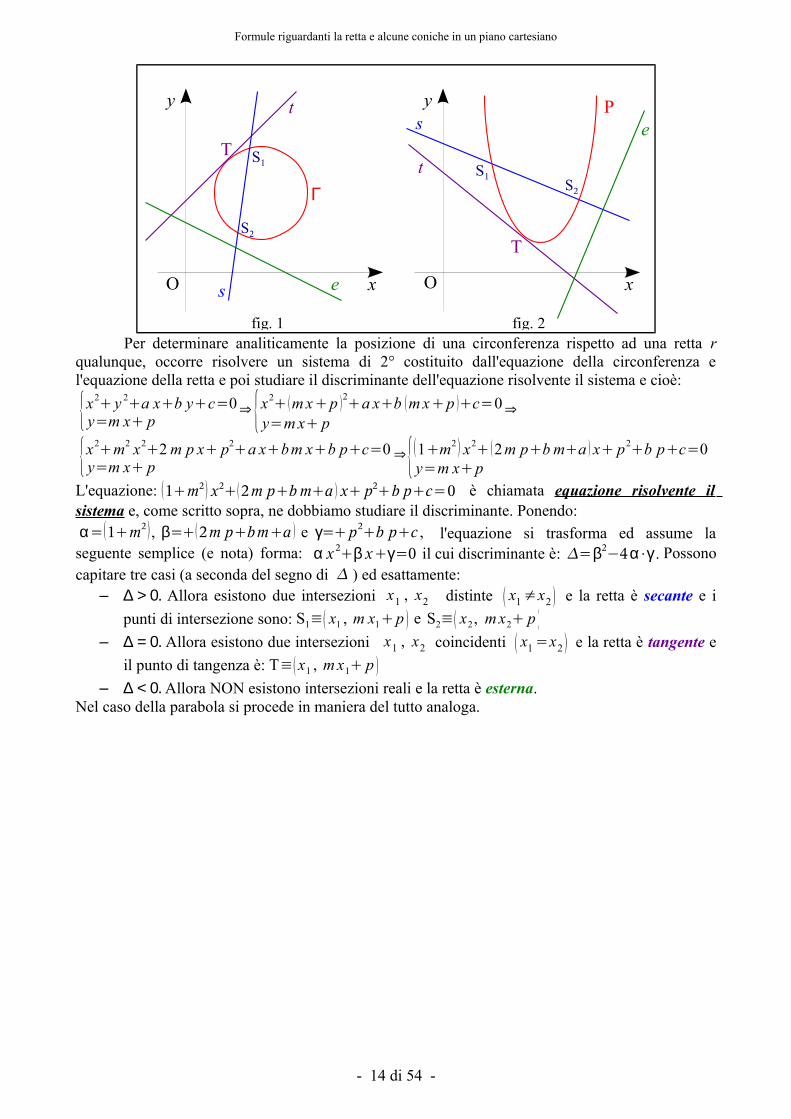
fig. 1 fig. 2Per determinare analiticamente la posizione di una circonferenza rispetto ad una retta r
qualunque, occorre risolvere un sistema di 2° costituito dall'equazione della circonferenza e l'equazione della retta e poi studiare il discriminante dell'equazione risolvente il sistema e cioè:
{x2 y 2a xb yc=0y=m x p
⇒ {x2 m x p 2a xb m x p c=0y=m x p
⇒
{x2m2 x22 m p x p2a xbm xb pc=0y=m x p
⇒{1m2 x2 2m pb ma x p2b pc=0y=m x p
L'equazione: 1m2 x2 2 m pb ma x p2b pc=0 è chiamata equazione risolvente il sistema e, come scritto sopra, ne dobbiamo studiare il discriminante. Ponendo:α=1m2 , β= 2m pbma e γ= p2b pc , l'equazione si trasforma ed assume la seguente semplice (e nota) forma: α x 2β xγ=0 il cui discriminante è: =β2−4α⋅γ . Possono capitare tre casi (a seconda del segno di ) ed esattamente: – ∆ > 0. Allora esistono due intersezioni x1 , x2 distinte x1 ≠x2 e la retta è secante e i
punti di intersezione sono: S1≡ x1 , m x1 p e S2≡ x2, m x2 p – ∆ = 0. Allora esistono due intersezioni x1 , x2 coincidenti x1 =x2 e la retta è tangente e
il punto di tangenza è: T≡ x1 , m x1 p – ∆ < 0. Allora NON esistono intersezioni reali e la retta è esterna.
Nel caso della parabola si procede in maniera del tutto analoga.
- 14 di 54 -

Dimostrazione della formula della distanza punto-retta
Dimostrazione della formula della distanza punto-retta
Siano assegnati una retta r:axbyc=0 ed un punto P0 esterno ad r cioè P0≡ x0, y0 ∉r.
Facendo riferimento alla fig. 1, ricordiamo che la distanza fra un punto ed una retta è rappresentata dal segmento di minima lunghezza che possiamo tracciare per congiungere il punto e la retta in questione. In base a ciò, il segmento, che ha origine in P0 dovrà essere ortogonale alla retta r. Sia H il piede della perpendicolare tracciata da P0 .
fig. 1
Detto ciò, vogliamo dimostrare che la distanza d=HP0 è definita dalla seguente formula:
d=∣ax0by0c∣
a2b2
Dim. Sapendo che la retta r è assegnata in forma implicita (qualora fosse assegnata in forma esplicita sappiamo che è sempre possibile esprimerla in forma implicita con semplici passaggi algebrici), possiamo determinarne il coefficiente angolare:
mr=− ab
e, dovendo essere HP0 ⊥ r possiamo calcolare il coefficiente angolare della retta HP0 e cioè:
mr⊥= b
a.
Scriviamo l'equazione della retta HP0 che ha per coefficiente angolare ba
:
HP0 : y− y0= ba
x−x0 e, calcolando il m.c.m. ed eliminando il denominatore se a≠0 , si ha:
HP0 : a y− y0 =b x− x0 .Adesso, allo scopo di determinare le coordinate del punto d'intersezione H fra la retta HP0 e la retta r, impostiamo e risolviamo il sistema:
{axbyc=0a y− y0 =b x−x0 ⇒{x=−byc
aa y− y0 =b x− x0
⇒{x=−byca
b −byca
−x0−a y − y0 =0⇒
{x=−byca
−b2 y−bc−abx0−a2 ya2 y0=0
⇒{x =−byca
− y a2b2 =bcabx0−a2 y0
⇒ {x=−byca
y a2b2 =a2 y0−abx0−bc
⇒
- 15 di 54 -
rO x
y
O
Hd
P0≡ x0 , y0

Dimostrazione della formula della distanza punto-retta
{x=−
by+ ca
y H=a2 y0−abx0−bc
a2+ b2⏟
yH è l'ordinata di H
⇒ {x=−b
a2 y0−abx0−bc
a2+ b2 + c
a
y H=a2 y0−abx0−bc
a2+ b2
⇒ {ax+ ba2 y0−abx0−bc
a2+ b2 + c=0
yH=a2 y0−abx0−bc
a2+ b2
⇒
{a3 xa b2 xa2 b y0−a b2 x0−b2 ca2cb2 c=0
y H=a2 y0−abx0−bc
a2b2
⇒{a3 xab2 xa2 b y0−ab2 x0a2 c=0
y H=a2 y0−abx0−bc
a2b2
⇒
{a2 x+ b2 x+ ab y0−b2 x0+ ac=0
yH=a2 y0−abx0−bc
a2+ b2
⇒ {xH=
b2 x0−ab y0−a c
a2+ b2⏟xH è l'ascissa di H
y H=a2 y0−abx0−bc
a2+ b2
⇒
H≡( b2 x0−ab y0−a c
a2+ b2
, a2 y0−abx0−bc
a2+ b2 ) .
Adesso, utilizzando la formula della distanza fra due punti, troviamo d=HP0.
d=HP0=√(x0−b2 x0−a b y0−a c
a2+b2 )
2
+( y0−a2 y0−abx0−bc
a2+b2 )
2
=
=√((a2+b2) x0−b2 x0+a b y0+a c
a2+b2 )
2
+((a2+b2) y0−a2 y0+abx0+bc
a2+b2 )
2
=
=√( 1
a2+b2 )
2
(( (a2+b2) x0−b2 x0+a b y0+a c )
2+ ( (a2
+b2) y0−a2 y0+abx0+bc )2
)=
=√( 1
a2+b2 )
2
((a2 x0+b2 x0−b2 x0+a b y0+a c )2+ (a2 y0+b2 y0−a2 y0+abx0+bc )
2)=
=√( 1
a2+b2 )
2
((a2 x0+a b y0+a c )2+ (b2 y0+abx0+bc )
2)=
=√( 1
a2+b2 )
2
(a4 x02+a2b2 y0
2+a2 c2
+2a3 b x0 y0+2a3 c x0+2 a2b c y0+b4 y02+a2b2 x0
2+b2 c2
+
+2a b3 x0 y0+2b3c y0+2a b2c x0)
=
=√( 1
a2+b2 )
2
(a2 x02 (a2
+b2 )+b2 y02 (a2
+b2)+2 a b x0 y0 (a2+b2)+2 a c x0 (a
2+b2)+2b c y0 (a
2+b2)+
+c2 (a2+b2) )
= √( 1
a2+b2)
2
(a2+b2) (a2 x0
2+b2 y0
2+2 a b x0 y0+2a c x0+2b c y0+c2 )=
=√( a2+1
b2
(a2+b2)
21 )(a2 x0
2+b2 y0
2+c2+2 a b x0 y0+2a c x0+2b c y0 )⏟
Questa espressione è il quadrato di: a x0+b y0+c
= √ (a x0+b y0+c )2
a2+b2 =
√ (a x0+b y0+c )2
√a2+b2
=
=∣a x0+b y0+c∣
√a2+b2
c.v.d.
- 16 di 54 -

Dimostrazione dell'equazione cartesiana di una retta
Dimostrazione dell'equazione cartesiana di una retta
Siano assegnati due punti distinti P1≡ x1 , y1 e P2≡ x2 , y2 con il segmento P1 P2 non parallelo né
all'asse x né all'asse y. Per un postulato di geometria elementare sappiamo che, per due punti distinti, passa una e una sola retta P1 P2. Basandoci su questo postulato, vogliamo determinare l'equazione cartesiana della retta r che, in piano cartesiano ortogonale e monometrico Oxy, passa per i due punti distinti P1 e P2 .
fig. 1Dim. Consideriamo la fig. 1. Supponiamo, senza perdere nulla in generalità, che anche P∈r. P è un qualunque altro punto appartenente alla retta r e quindi le sue coordinate saranno generiche e incognite: P≡ x , y . Partendo dai punti P1≡ x1 , y1 , P2≡ x2 , y2 e P≡ x , y tracciamo le proie-zioni ortogonali P1 H1 , P2 H2 , P H (rispetto all'asse x ) e P1 K1 , P2 K2 , P K (rispetto all'asse y ). Per la perpendicolarità, conosciamo le misure dei seguenti segmenti:
(*) HH1 = x−x1 , H2 H1 = x2− x1 , KK1 = y− y1 , K2 K1 = y2− y1 .
Inoltre, i due trapezi rettangoli H1 H2 P2 P1 e H1 H P P1 sono simili tra loro poiché hanno lo stesso numero di lati e gli angoli corrispondenti congruenti e quindi vale questa relazione:
(1)HH1
H2 H1
=PP1
P2 P1
,
e, per lo stesso motivo, i due trapezi rettangoli K1 P1 P K e K1 P1 P2 K 2 sono simili tra loro cosicché vale questa relazione:
(2)KK1
K2 K1
=PP1
P2 P1
.
Confrontando la (1) con la (2) si ha:
(3)HH1
H2 H1
=KK1
K2 K1
e, sostituendo le misure definite dalle uguaglianze (*), si ottiene:
(4) r: x−x1
x2−x1
=y− y1
y2− y1
.
Quest'ultima uguaglianza si chiama: equazione cartesiana di una retta r passante per due punti distinti P1P2 .Oss.A) Se x1 = x2 , allora la retta P1 P2 è verticale. In questo caso, l'equazione (4) perde di
significato poiché un suo denominatore vale 0. È tuttavia naturale, in questo caso, utilizzare l'equazione:
- 17 di 54 -
r O x
y
O
P
P1
P2
B
H
C
A
H1 H2H2
K1
H1
K 2
K

Dimostrazione dell'equazione cartesiana di una retta
x = costante o, più sinteticamente: x=cost o, meglio ancora: r: x=k.B) Se y1= y2 , allora la retta P1 P2 è orizzontale. Come prima, l'equazione (4) perde di
significato poiché un suo denominatore vale 0. È tuttavia naturale, in questo caso, utilizzare l'equazione: y = costante o, più sinteticamente: y=cost o, meglio ancora: r: y=k.
C) Se x1≠x2 e y1≠ y2 allora, con semplici passaggi algebrici, possiamo riscrivere l'equazione (4) nella forma implicita e cioè:
(5) r:axbyc=0
e, ancora, isolando la variabile y, possiamo riscrivere l'equazione (4) nella forma esplicita e cioè:
(6) r:y=mx p
- 18 di 54 -

Esponenziali e logaritmi
Esponenziali e logaritmi
1. Potenza con esponente intero di un numero reale
Sia a∈ℝ ed n∈ℤ. Ricordiamo, anzitutto, le seguenti definizioni:1) se n > 1, si chiama potenza ennesima (che, da ora in poi, si scriverà n-ma) del
numero reale a, il prodotto di n fattori uguali ad a, cioè:an=a⋅a⋅a⋅. . . . . .⋅a⏟
n volte
2) se n = 1, si pone: a1=a ;
3) se n=0 e a≠0 , si pone:a0=1;
4) se n<0 e a≠0 , si pone:an=
1
a−n.
Dalle definizioni date segue che le proprietà delle potenze a esponente intero dei numeri razionali, valgono anche per le potenze a esponente intero dei numeri reali. Cioè:
se a, b∈ℝ ed m, n∈ℤ, risulta :
a) am⋅an=amn;b) am :an=am−n ;c) am n
=am⋅n;d) a⋅b n=an⋅bn;
e) ab n
= an
bn.
Si potrebbero dimostrare le seguenti proprietà:se a e b sono due numeri reali positivi ed n un numero intero positivo, allora:
α) da: a = b segue: an=bn . Viceversa:β) da: an=bn segue: a = b.γ) da: a > b, segue anbn , da: a < b, segue anbn e viceversa.
2. Potenza con esponente razionaleAbbiamo definito la potenza di un numero reale qualunque a nel caso dell'esponente intero
positivo, e, per a≠0, anche nel caso dell'esponente nullo o intero negativo. Estendiamo, ora, il concetto di potenza, considerando il caso di un esponente razionale qualunque e di una base positiva (o nulla se l'esponente è positivo).Diamo ora una definizione che permette di estendere alle nuove potenze le ordinarie regole del calcolo delle potenze ad esponente intero. Si definiscono, così, le seguenti proprietà:
a) se mn
0 e a ≥0 si pone: amn =
DEF.
nam ;
b) se mn
0 e a0 si pone: a− m
n = 1
amn
= 1nam
.
Osservazione:non si definiscono le potenze con esponente razionale dei numeri negativi e le potenze dello zero con esponente razionale negativo o nullo. Infatti se si cercasse di estendere le definizioni date al caso delle basi negative, si andrebbe incontro a delle ambiguità. Ad esempio si ha:
−32768 35=
5 −32768 3=−512 ;mentre:
- 19 di 54 -

Esponenziali e logaritmi
−32768 610=
10 −32768 6=512.
Dunque, pur essendo 35=
610
, è (−32768 )35≠(−32768 )
610 .
Non è difficile provare che le potenze a esponente razionale conservano le proprietà delle potenze a
esponente intero. Cioè, se a e b sono numeri reali positivi emn
, pq
numeri razionali, risulta, come è
noto:
α) amn⋅a
pq=a
mn+
pq ;
β) amn :a
pq=a
mn
− pq , a≠0 ;
γ) (amn )
pq=a
mpnq ;
δ) ab mn = a
mn b
mn ;
ε) ab m
n = a mn
b mn
, b≠0 .
Anche per le potenze a esponente razionale vale la proprietà di monotònia e cioè:se a > 1 e h, k sono numeri razionali:da hk segue: ahak , e viceversa;se 0 < a < 1 e h, k sono numeri razionali:da hk segue: ahak , e viceversa.
Riassumendo:La potenza a x risulta definita:
1. se a> 0 , per ogni x∈ℝ;
2. se a=0 , per tutti e soli gli x∈ℝ+ ;
3. se a< 0 , per tutti e soli gli x∈ℤ .
Queste potenze sono definite:
(−√5 )2=(−√5 )⋅(−√5 ) ; 10
25=
5√102 ; 11−√2=1
11√2.
Le seguenti, invece, non sono definite: −33 e 0−5 . In particolare 00 non ha significato.
Complementi.
Cerchiamo di dare un significato al simbolo: 5 3.
Definiamo gli insiemi H, H1 e K, K 1 in questo modo:
H = {h∈ℚ | h23 } e H1 = { h' ∈ ℚ | h'23 };1
K = {k∈ℚ | k 25 } e K1 = { k' ∈ ℚ | k'25 }.È chiaro che gli insiemi H, H1 e K, K 1 non hanno alcun elemento in comune e, per questo,
si dice che formano una coppia di classi contigue di numeri razionali. Ciascuna di queste coppie definisce un numero reale, detto anche elemento separatore delle due classi. Per esempio, un modo
particolarmente semplice di definire il numero reale è quello di considerare le classi K e K 1 formate rispettivamente dalle sue approssimazioni per difetto e per eccesso a meno di 10 -1, 10-2, 10-
3, 10-4 , ....Così possiamo definire le due classi:
1 Con il simbolo ℚ si indica l'insieme dei numeri razionali.
- 20 di 54 -

Esponenziali e logaritmi
K = {2; 2,2; 2,23; 2,236; ....} e K1 = {3; 2,3; 2,24; 2,237; ...}.In modo analogo possiamo procedere per 3 e potremo scrivere :
5 = (K, K1 ) e 3 = (H, H1 ) per indicare quali sono i numeri reali definiti dalle due coppie di classi di numeri razionali. A questo punto si calcolano tutte le potenze di base 5 (si tratterà, ovviamente, di prendere valori approssimati del numero in questione) e di esponente uguale ai numeri razionali contenuti nell'insieme H, e tutti questi numeri, assieme a quelli minori di essi, si mettono in una nuova classe F; gli altri numeri si mettono in una nuova classe F1 .
Allora il numero 5 3 indica il numero reale che è l'elemento di separazione delle due classi F e F1 e si scriverà:
5 3= F, F1 .
3. Equazioni esponenzialiSi chiama equazione esponenziale ogni equazione in cui l'incognita compare all'esponente di
una o più potenze. Il caso più semplice di equazione esponenziale è l'equazione:(1) ax=bdetta equazione esponenziale elementare. Si osserva, prima di tutto, che nell'insieme dei numeri reali la (1) può avere soluzioni solo se a > 0 e b > 0; infatti:a) il primo membro della (1), che è una potenza a esponente reale, ha significato solo se a è
positivo;b) inoltre, la potenza ax
risulta sempre positiva, per ogni valore della x; pertanto l'equazione (1) può avere soluzione solo quando anche b è positivo.
Nell'ipotesi a > 0, b > 0, esaminiamo alcuni casi particolari:1) se è: a = 1, b = 1 l'equazione (1) diventa:
1x =1 che è un'identità;2) se è: a = 1, b≠1, si ha l'equazione: 1x=b ≠1 , che è impossibile;
3) se è: a≠1 , b = 1, si ha l'equazione a x=1, che ammette la soluzione x = 0, poiché è: a0=1 . Per gli altri casi, in cui a e b sono entrambi (positivi e) diversi da 1, sussiste il seguente teorema di cui viene omessa la dimostrazione:Teorema 3.1: dati due numeri reali positivi a e b con a≠1 , l'equazione esponenziale:
ax=bammette una e una sola soluzione. Tale soluzione è positiva se a e b sono entrambi maggiori di 1, o entrambi minori di 1; è negativa se dei due numeri a e b uno è maggiore di 1 e l'altro minore di 1; è uguale a 0 se è b = 1 e a > 0.ESEMPI.L'equazione: 3x=9 ha per soluzione: x = 2.
L'equazione: 3x= 19
ha per soluzione: x=−2 .
L'equazione: 3x=1 ha per soluzione: x = 0.
L'equazione: 13 x
=1 ha per soluzione: x = 0.
L'equazione: 3x=−9 NON ha soluzione.L'equazione: 62− x⋅3x1=864 2−x per le note proprietà sulle potenze si può scrivere sotto la forma:62
6x⋅3x⋅3=864 , ossia 3
6 x
⋅62⋅3=864 , e semplificando: 12 x
=8 . Di qui si ricava: x=−3 che è
l'unica soluzione dell'equazione data.
ESERCIZI:Trovare la soluzione delle seguenti equazioni esponenziali:
- 21 di 54 -

Esponenziali e logaritmi
1) 5x2−5 x 7
=125 ; x1 , 2=1,4 ;
2) 3x1 x−2 ⋅93 x2=81x2 ; x1 , 2=2,−3 ;
3) 9⋅32 x
−82⋅3x9=0.Suggeriemnto: porre 3x= y . x1 ,2=2,−2 .
4. Funzioni esponenziali
Se a > 0, per ogni numero reale x, la potenza ax è definita. Possiamo quindi definire la funzione f da ℝ in ℝ ponendo, per ogni x∈ℝ :
(1) f x =ax .
Se a = 1, f è costante:f x =1x=1 , per ogni x reale.
Se a > 0 ed a≠1 la funzione (1) si dice funzione esponenziale di base a.La più importante proprietà della funzione esponenziale è data dal seguente teorema, che è un altro modo di enunciare il teorema 3.1:Teorema 4.1: se a è positivo, diverso da 1, allora la funzione esponenziale: y=ax assume, uno alla volta, come valore, qualsiasi numero positivo b.Da questo teorema segue che:a) la funzione esponenziale è biiettiva;b) la funzione esponenziale è monotòna
b1) crescente, se a > 1;b2) decrescente, se 0 < a < 1. Da qui si conclude che la funzione esponenziale è invertibile in ℝ .
5. Grafico della funzione esponenzialeDistinguiamo 3 casi: a > 1 (ved. fig. 1); 0 < a < 1 (ved. fig. 2) e a = 1. In quest'ultimo caso la
funzione, per ogni x, assume sempre il valore 1. Quindi il grafico è rappresentato dalla retta di equazione y = 1.
fig.1 fig.2
Il grafico della funzione y=ax , con a maggiore di 0 e diverso da 1, si chiama curva esponenziale.
6. Logaritmi
Il teorema 4.1 ci assicura che, dati due numeri positivi a e b, con a≠1 , l'equazione ax=b
- 22 di 54 -

Esponenziali e logaritmi
ammette una e una sola soluzione. Tale soluzione si chiama logaritmo di b in base a e si indica con la scrittura:
loga b ;si pone, cioè, la seguente definizione:dati due numeri positivi a e b, con a≠1 , si chiama logaritmo in base a del numero b, l'unica
soluzione dell'equazione ax=b , cioè quell'unico numero reale α, che dato come esponente della
base a, rende la potenza aα uguale a b.Pertanto le scritture:
loga b=α e aα=b ,sono equivalenti. Il numero b si chiama argomento del logaritmo, e, per quanto detto, deve essere un numero reale positivo.Osservazione 1: la definizione di logaritmo permette di affermare che:ogni numero reale b si può scrivere, in modo unico, come potenza di un altro qualsiasi numero a positivo, diverso da 1.Infatti vale la seguente uguaglianza:
b=a loga b .In altre parole, ogni numero b > 0 si può pensare come potenza di base prefissata, qualsiasi, positiva e diversa da 1.
ESEMPI:1) log3 9=2, perché è:32=9 ;
2) log 12
18
=3 , perché è: 12 3
= 18 ;
3) log10 0,1=−1, perché è:10−1= 110
;
4) log51=0, perché è:50=1;
5) log9 9=1 , perché è: 91=9 ;
6) loga a3= 32
, perché è:a32=a3 .
Dal teorema prima ricordato e dalla definizione di logaritmo, si hanno le seguenti proprietà:P1) il loga b è positivo se:
{a1b1
e {0a10b1
;
P2) il loga b è negativo se:
{a10b1
e {0a1b1
;
P3) loga a=1 , perché a1=a ;P4) loga 1=0, perché a0=1;P5) se due numeri sono uguali, anche i loro logaritmi (rispetto alla stessa base) sono uguali; e
viceversa;P6) se la base è maggiore di 1, al crescere del numero b, cresce anche il logaritmo di questo;P7) se la base è minore di 1, al crescere del numero b, il logaritmo decresce.Osservazione 2: non si può parlare di logaritmo di un numero rispetto alla base 1 (perché l'equazione 1x=b è impossibile (se b≠1 ), o indeterminata (se b = 1)), o rispetto a una base negativa o nulla (perché la potenza ax è definita per a > 0; l'equazione: 0x=b è impossibile o indeterminata.Infatti, se a = 0, allora 0x=0 per ogni x > 0. In tal caso l'equazione 0x=b è impossibile se b≠0 ed indeterminata se b = 0). Quindi:
NON ESISTE il logaritmo di un numero negativo.
- 23 di 54 -

Esponenziali e logaritmi
L'insieme dei logaritmi di tutti i numeri positivi, rispetto ad una data base a, si chiama sistema dei logaritmi con base a.Esistono, naturalmente, infiniti sistemi di logaritmi, perché infinite sono le possibili basi (cioè tutti i numeri reali positivi e diversi da 1). Tra questi infiniti sistemi di logaritmi, due sono quelli che più comunemente si considerano, e precisamente:a) quello in base e, dove e è un numero irrazionale che vale a meno di 10−5 : e≃2,7182818 .
Il logaritmo in base e di un numero positivo N si chiama anche logaritmo naturale e lo si indica con questa notazione:
ln N,al posto di: loge N;b) quello a base 10, detto sistema dei logaritmi decimali, o di Briggs.Il logaritmo decimale di un numero positivo N, viene indicato con la seguente notazione:
log N,invece di: log10 N; omettendo cioè l'indicazione della base 10.
7. Proprietà dei logaritmi
Il calcolo dei logaritmi si fonda su alcune importanti proprietà valide qualunque sia la base a positiva e diversa da 1.
Allora, per ogni base a positiva, diversa da 1, si ha:1°) Il logaritmo del prodotto di due (o più) numeri positivi b e c è uguale alla somma dei
logaritmi dei singoli fattori, cioè:
(1) loga b⋅c =log a bloga c .
2°) Il logaritmo del quoziente di due numeri positivi b e c è uguale alla differenza fra i logaritmi del dividendo e del divisore, cioè:
(2) loga bc =loga b−loga c .
3°) Il logaritmo di una potenza ad esponente reale e base positiva, è uguale al prodotto dell'esponente della potenza per il logaritmo della base della potenza, cioè:
(3) loga bc =c⋅loga b .
4°) Il logaritmo di un radicale è uguale al quoziente del logaritmo del radicando per l'indice del radicale, cioè:
(4) loganb= 1
n⋅log ab .
A commento di queste proprietà, è bene ripetere che per poter applicare la 1°) e la 2°), i singoli numeri b e c devono essere positivi.
Inoltre, per non commettere gravi errori, sia noto che non esistono proprietà simili a quelle elencate sopra, che permettono di trasformare espressioni del tipo:
loga bc , loga b−c , loga b ⋅ log a c , log a b
loga c.
8. Passaggio da un sistema di logaritmi a un altro
Siccome esistono infiniti sistemi di logaritmi, è naturale chiedersi come sia possibile passare da un sistema di logaritmi a un altro. In altre parole, supposto di conoscere il logaritmo di un numero positivo N, rispetto ad una base a, si vuol determinare il logaritmo dello stesso numero, rispetto a un'altra base b. A tale scopo, posto:
- 24 di 54 -

Esponenziali e logaritmi
x=logb N, cioè: bx= N;calcolando il logaritmo della base a di entrambi i membri di quest'ultima uguaglianza, si ha:
loga bx= loga N, cioè: x⋅loga b=loga N ,da cui, tenendo presente che x=logb N, si ottiene:
logb N=log a N
loga b.
9. Funzione logaritmica e relativo grafico
Nel paragrafo 6 si è notato che se a è positivo e diverso da 1, ad ogni numero reale positivo b corrisponde il numero reale loga b .Possiamo dare quindi la seguente definizione:se a > 0 e a≠1 , la funzione f :ℝ ℝ :
f x =loga xsi chiama funzione logaritmica di base a. Essa gode di alcune proprietà di cui le più importanti sono:a) la funzione è biiettiva, cioè è una corrispondenza biunivoca fra ℝ e ℝ ;b) la funzione logaritmica è monotòna:
b1) crescente per a > 1;b2) decrescente per 0 < a < 1, quindi:
c) la funzione logaritmica è invertibile su tutta la retta reale;d) l'inversa della funzione esponenziale di base a è la funzione logaritmica di base a.Nelle due figure riportate qui sotto ci sono disegnati i grafici di due funzioni logaritmiche. In fig. 3 è tracciato il grafico della funzione:
y=log12
x=ln x
ln12
,
mentre in fig. 4 è riportato il grafico della funzione:
y=log 2 x=ln xln 2
.
fig. 3 fig. 4
10. Equazioni logaritmiche
Un'equazione si dice logaritmica quando in essa compare il logaritmo dell'incognita, o di qualche espressione contenente l'incognita. Per risolvere un'equazione logaritmica si cerca, con l'aiuto delle proprietà inverse di quelle descritte al paragrafo n° 7, di trasformare l'equazione sotto la forma :
- 25 di 54 -

Esponenziali e logaritmi
(1) loga A x =loga B x dove A(x) e B(x) sono espressioni algebriche contenenti l'incognita x.Da qui segue che i valori della x che soddisfano la (1), devono soddisfare l'equazione:(2) A(x) = B(x).
Ora però bisogna notare che non vale la proprietà inversa, cioè una soluzione della (2) può non soddisfare la (1) e ciò capita quando tale soluzione fa perdere di significato ad almeno un logaritmo della (1). Perciò, dopo aver risolto la (2), bisogna verificare se le soluzioni trovate soddisfano, o no, l'equazione data.ESEMPIO.Si debba risolvere l'equazione logaritmica:
log x1 log x−1 − log x−2 =log8.Prima di tutto, bisogna osservare che i logaritmi contenuti nell'equazione data avranno significato solo se alla x si attribuiscono valori che rendono positivi, simultaneamente, i tre polinomi: x1 , x−1 , x−2 , cioè tale da aversi:
x10 , x−10, x −20 .Fatta questa premessa, l'equazione data può essere messa nella forma più conveniente:
log x−1 x1
x −2=log8 ;
da cui, passando dai logaritmi all'algebra: x−1 x1
x−2=8;
cioè:x2−8x15=0 ,
le cui soluzioni sono x1=5 e x2=3 , che sono entrambe accettabili, come è facile verificare.
ESERCIZI.Risolvi le seguenti equazioni logaritmiche:
1) 12
log x12
log 3 x5 =1 ; solo una soluzione: x =5 .
2) log x5log x2
− 25
log x 5 =− 25
; x1=10 e x2=10−9
2= 1
104 10 .3) 2 log x−1 =1−log 5 .
4) log x23 x36 =1log x3 ; x1=1 e x2=6 .5) 2 log x−7 −log x1 =1.
Determina l'insieme di esistenza delle seguenti funzioni:1) y=log 3 x−1 2 log x1 ;2) y= log log x2 ;3) y=log sen x ;
4) y=log1
x2−1.
Cerca, infine, di risolvere graficamente l'equazione non elementare:x2−3 x2−ln x=0.
ESERCIZI VARI.Risolvi, nell'insieme dei numeri reali, le seguenti equazioni esponenziali:1) 3x3x13x2=39, x=1 ;2) 2x2 x12x22x32x 4=31, x =0;3) 2x −12x−2−2x−3=10, x =4;
- 26 di 54 -

Esponenziali e logaritmi
4) 2x3x−22x−3=3x−13x−4−2x−4 , x=4 ;5) 3x−3x−2=22 x−22 x−1 , x=2 ;6) 3x231− x=28 , x=1 , x=−2 ;7) 2 24−x2x1=33 , x =4 , x =−1 ;8) 2x1 2x23 =5 , x = −2 ;9) 3 x34− x=18 , x=4;10) 26 x2− x=16 , S =∅ ;
11) 9x 1
2 32 x−1
5x1=2 ; x=
log 3log 9−log5
;
12)2x−1⋅4 x1
3=61−x ; x=
log9log 48
.
Risolvi, nell'insieme dei numeri reali, le seguenti equazioni logaritmiche:
1)log x2log x4
− 1log x
= 12
2)2log x−1
log x2 2− 1
log x 2
log x2=0; x1=
110
e x2=10310 ;
3) log3 x2 +3 x -3−log3 x −2 =1log3 x2 , x=3 ;
4) 2log x -1log x 3 =log x3−1 , x=4 ;
5) log 2 [ 2−1 x x−2 2]=1log2 42 ; x1=−2 e x2= 23 ;
6) 3log 2 xlog 12
x =4−log 21x
; x= 116
;
7) log3 x3 log 13
x2x −2 =log13
x2 log3 2; x =5;
8) 2 x1 log2=log 12x ; x =0 ;
9) log 41− x2 −log2=log 22 x1−3 ; x= log 1 2 log4
;
10) log 2x−13x2=log3log 3x−2 4x1 ; x= log33-log52log3-log2
;
11) {log2 x−2=log232y
x y=4;
12) {log2 2 x− y=0
2x2 y=12.
2 --- 12 settembre 2012
- 27 di 54 -
Relazioni e funzioni
Relazioni e funzioni
1. Prodotto cartesiano fra insiemi
Siano assegnati due insiemi qualunque A e B. Definiamo prodotto cartesiano di A per B un nuovo insieme costituito da tutte le possibili coppie ordinate che possiamo formare a partire dagli elementi dei due insiemi e cioè:
AxB= {(a , b )∣a∈A e b∈B } .Il concetto di ordine è riferito alla posizione che ogni elemento occupa all'interno della coppia a cui appartiene. Inoltre non vale la proprietà commutativa in quanto, in generale, si ha che (a ,b )≠(b ,a ) .Ad esempio, poniamo A=B=ℝ . Allora:
AxB=ℝ xℝ=ℝ2
in modo tale che, in questo caso, AxB coincide con il piano cartesiano che già conosciamo.Se adesso abbiamo tre insiemi A, B e C tali che: A=B=C=ℝ si ha che:
AxBxC=ℝ xℝ xℝ=ℝ3
che corrisponde allo spazio cartesiano dove un punto qualunque è individuato da una terna ordinata di numeri reali e cioè P≡( x , y , z ).Inoltre, consideriamo i due insiemi:
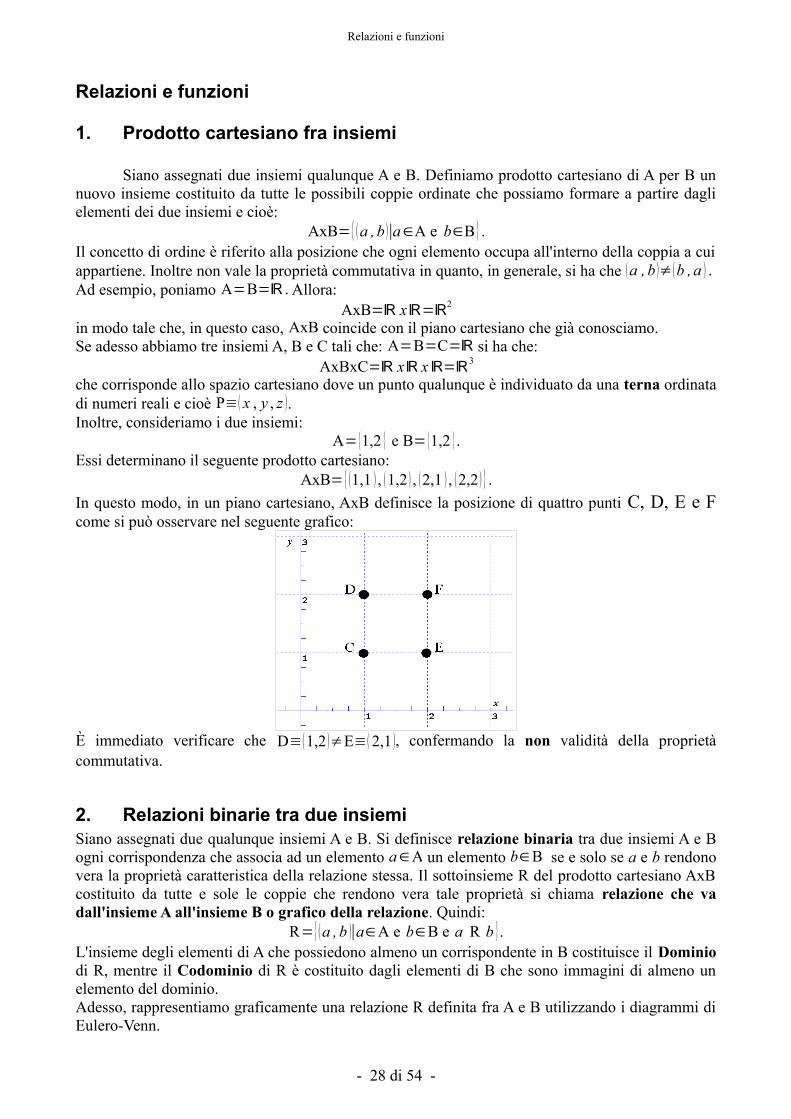
A= {1,2 } e B= {1,2 }.Essi determinano il seguente prodotto cartesiano:
AxB= {(1,1 ) , (1,2 ) , (2,1 ) , (2,2 ) } .In questo modo, in un piano cartesiano, AxB definisce la posizione di quattro punti C, D, E e F come si può osservare nel seguente grafico:
È immediato verificare che D≡(1,2 )≠E≡(2,1 ), confermando la non validità della proprietà commutativa.
2. Relazioni binarie tra due insiemiSiano assegnati due qualunque insiemi A e B. Si definisce relazione binaria tra due insiemi A e B ogni corrispondenza che associa ad un elemento a∈A un elemento b∈B se e solo se a e b rendono vera la proprietà caratteristica della relazione stessa. Il sottoinsieme R del prodotto cartesiano AxB costituito da tutte e sole le coppie che rendono vera tale proprietà si chiama relazione che va dall'insieme A all'insieme B o grafico della relazione. Quindi:
R={(a , b )∣a∈A e b∈B e a R b }.L'insieme degli elementi di A che possiedono almeno un corrispondente in B costituisce il Dominio di R, mentre il Codominio di R è costituito dagli elementi di B che sono immagini di almeno un elemento del dominio. Adesso, rappresentiamo graficamente una relazione R definita fra A e B utilizzando i diagrammi di Eulero-Venn.
- 28 di 54 -

Relazioni e funzioni
Possiamo notare che:1. il dominio di R e il codominio di R hanno diversa cardinalità. Infatti:
dominio (R )={a1 , a2,a4 ,a6 } e codominio (R )={b1,b2 ,b4 ,b6 ,b8 }2. da alcuni elementi di A partono frecce che congiungono alcuni elementi di B.
Vediamo ora un esempio più specifico. Consideriamo il seguente diagrammi di Eulero-Venn:
Come si può facilmente capire, questa relazione associa ad ogni numero intero relativo il suo quadrato e potrebbe essere indicata da una di queste notazioni:
1a. R : z → z2 , ∀z∈ℤ1b. R ( z )= z2 , ∀z∈ℤ .
3. Le proprietà di una relazione R
Vediamo ora alcune delle più importanti proprietà a cui può soddisfare una relazione R definita fra gli elementi di un insieme A e se stesso. Siano a, b e c tre elementi di A. La relazione R è:
1e. Riflessiva, se vale a R a2e. Simmetrica, se vale a R b allora è anche b R a3e. Transitiva, se vale a R b e se è anche b R c allora a R c
Se valgono contemporaneamente queste tre proprietà si dirà che R è una relazione di equivalenza.
- 29 di 54 -
a1 ⋅
a2 ⋅
a3 ⋅
a4 ⋅
a5 ⋅
a6 ⋅
⋅ b1
⋅ b2
⋅ b3
⋅ b4
⋅ b5
⋅ b6
⋅ b7
⋅ b8
A B
R
⋅ ⋅ ⋅−5 ⋅−4 ⋅−3 ⋅−2 ⋅−1 ⋅0 ⋅1 ⋅2 ⋅3 ⋅4 ⋅5 ⋅⋅⋅⋅
⋅ 0
⋅ 1
⋅ 4
⋅ 9
⋅ 16
⋅ 25
⋅ ⋅ ⋅
AB
R
Relazioni e funzioni
Ad esempio, consideriamo l'insieme delle rette di un piano. Valgono le seguenti proprietà:ogni retta r è parallela a se stessa;se una retta r è parallela ad un'altra retta s allora anche la retta s è parallela alla retta r;se una retta r è parallela ad un'altra retta s e s è parallela ad una terza retta t allora la retta r è parallela rispetto alla retta t.
Valendo la proprietà riflessiva, simmetrica e transitiva, si deduce che la relazione R di parallelismo fra rette è una relazione di equivalenza.Vediamo adesso un altro caso di una proprietà che definisce una relazione di diverso tipo. Siano ancora a, b e c tre elementi di A. La relazione R è:
1o. Riflessiva, se vale a R a2o. Antisimmetrica, se vale a R b ed è anche b R a allora si ha che a=b3o. Transitiva, se vale a R b e se è anche b R c allora a R c
Se valgono contemporaneamente queste tre proprietà si dirà che R è una relazione di ordine.Ad esempio, consideriamo nell'insieme dei numeri naturali la relazione "è minore od uguale a". Valgono le seguenti proprietà:
vale la proprietà riflessiva poiché è vero che, per ogni numero naturale n, n≤n;vale la proprietà antisimmetrica poiché è vero che, per ogni coppia di numeri naturali n e m,se n≤m e m≤n allora m=n ;
vale la proprietà transitiva poiché è vero che, per ogni terna di numeri naturali n, m e p,se n≤m e m≤ p allora m≤ p ;
Valendo la proprietà riflessiva, antisimmetrica e transitiva, si deduce che la relazione R definita dalla frase "è minore od uguale a" fra numeri naturali è una relazione di ordine.
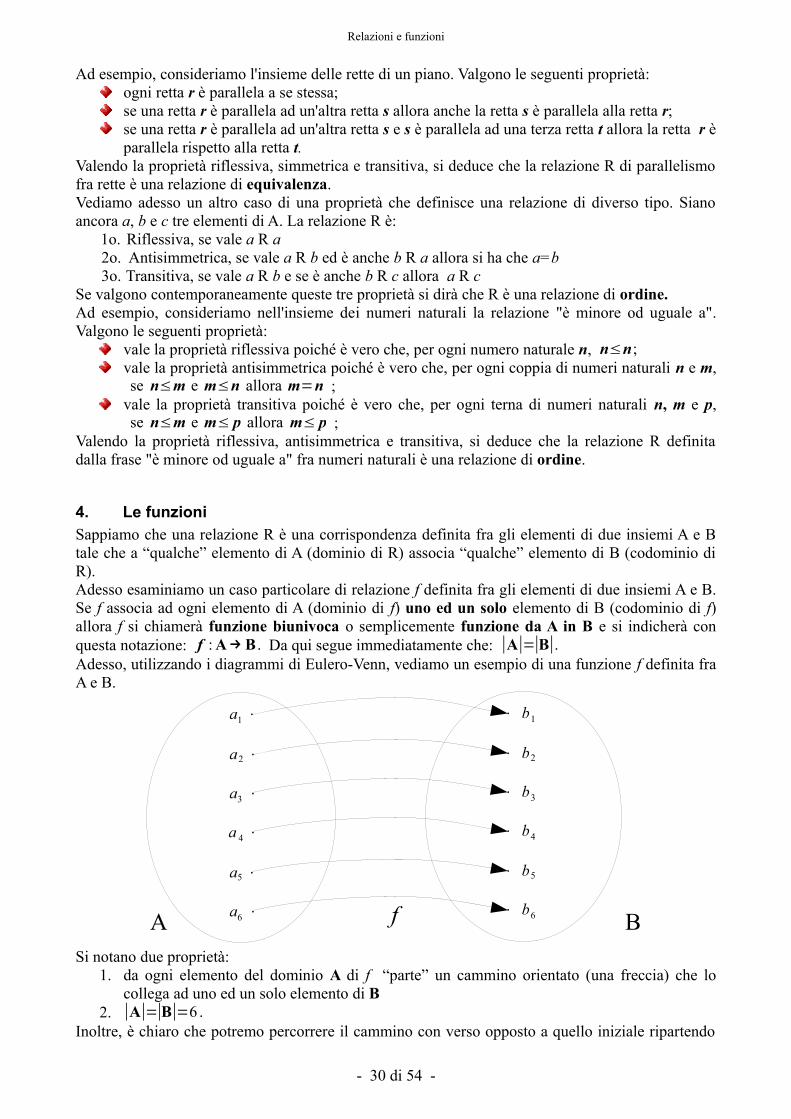
4. Le funzioniSappiamo che una relazione R è una corrispondenza definita fra gli elementi di due insiemi A e B tale che a “qualche” elemento di A (dominio di R) associa “qualche” elemento di B (codominio di R).Adesso esaminiamo un caso particolare di relazione f definita fra gli elementi di due insiemi A e B. Se f associa ad ogni elemento di A (dominio di f) uno ed un solo elemento di B (codominio di f) allora f si chiamerà funzione biunivoca o semplicemente funzione da A in B e si indicherà con questa notazione: f : A→ B . Da qui segue immediatamente che: ∣A∣=∣B∣.Adesso, utilizzando i diagrammi di Eulero-Venn, vediamo un esempio di una funzione f definita fra A e B.
Si notano due proprietà:1. da ogni elemento del dominio A di f “parte” un cammino orientato (una freccia) che lo
collega ad uno ed un solo elemento di B 2. ∣A∣=∣B∣=6 .
Inoltre, è chiaro che potremo percorrere il cammino con verso opposto a quello iniziale ripartendo
- 30 di 54 -
a1 ⋅
a2 ⋅
a3 ⋅
a 4 ⋅
a5 ⋅
a6 ⋅
⋅ b1
⋅ b2
⋅ b3
⋅ b4
⋅ b5
⋅ b6A Bf

Relazioni e funzioni
da ciascun elemento di B per ritornare all'elemento corrispondente di A e cioè:
avendo indicato con il simbolo f −1: B→A la funzione che ha per dominio gli elementi dell'insieme B e per codominio gli elementi dell'insieme A.
- 31 di 54 -
a1 ⋅
a2 ⋅
a3 ⋅
a4 ⋅
a5 ⋅
a6 ⋅
⋅ b1
⋅ b2
⋅ b3
⋅ b4
⋅ b5
⋅ b6A Bf −1

Funzioni invertibili
Funzioni invertibili
Sia f una corrispondenza biunivoca di A B. Sappiamo che ogni elemento di B è immagine di un solo elemento di A. In questo caso la f definisce una funzione g : B A ottenuta, se è: y= f x ponendo:
x= g y .La funzione g si chiama inversa della f, e si indica con il simbolo f −1; in tal caso si dice
anche che f è invertibile. Evidentemente, si ha:f −1 [ f x ]=x , per ogni x∈A,
f [ f −1 y ]= y , per ogni y∈B.Definizione: Data la funzione f : A B, si chiama funzione inversa della f, la funzionef −1: B A tale che:
f −1 [ f x ]=x , per ogni x∈A,
f [ f −1 y ]= y , per ogni y∈B.È evidente che una funzione è invertibile se e solo se essa è biettiva.Sussiste il seguente teorema: se f è monotòna crescente, o decrescente, allora essa è
invertibile, e la sua inversa è anche monotòna.Esempi:
1) f : ℝ ℝ con f x =2 x1 .La f è crescente in ℝ. Con un po’ di algebra, si riesce a determinare la funzione inversa della
f che è:
f −1: ℝ ℝ con f −1 y = y−12
.
Verificare che:f −1 [ f x ]=x , e che:
f [ f −1 y ]= y .2) f : ℝ ℝ , con f x =x2 . f: ℝ+ ℝ+, con f(x) = x2. Poiché in ℝ , da x2= y segue x= y , si ha: f −1 :ℝ ℝ , con f −1 y = y .
È utile notare che se la funzione y= f x ha come inversa la funzione x= g y , allora i grafici di queste due funzioni sono, evidentemente, identici. Però se indichiamo ancora con x la variabile indipendente della funzione inversa e con y il valore della funzione e tracciamo il grafico della funzione y= f x e quello della sua inversa x= g y , relativamente ad uno stesso sistema di coordinate, noi otterremo due grafici differenti.
Poiché il passaggio da (x, y) a (y, x) equivale ad una simmetria (ortogonale) rispetto alla bisettrice del 1° e 3° quadrante, ne segue che i grafici delle due funzioni f e g, sono tra loro simmetrici rispetto alla retta y = x.
Funzioni inverse delle funzioni seno e coseno.
1) La funzione arco seno.La funzione y = senx, nel suo intero insieme di definizione (= ℝ), non è né crescente né
decrescente. Infatti la funzione senx è periodica di periodo 2π, e, quindi, attribuendo alla x valori che differiscono fra loro per multipli interi di 2π, senx assume sempre lo stesso valore.
- 32 di 54 -

Funzioni invertibili
-1-2-3-4 1 2 3
-1
-2
1
2
3
x
y
y= x
y= arcsinx
y= sinx
Le funzioni senx e arcsenx.
-1-2-3 1 2 3 4
-1
1
2
3
4
x
y
y= x
y= cos x
y= arccos x
Le funzioni cosx e arccosx.
Se conveniamo, però, di far variare x soltanto nell'intervallo chiuso [−π2
, π2 ] in questo
intervallo la funzione è sempre crescente e assume tutti i valori reali che vanno da -1 a +1.
Perciò nell'intervallo [−π2
, π2 ], la funzione y = senx si può invertire; la sua funzione inversa
si dice arco seno e si indica con la scrittura:x = arcseny,
che si legge: “x è uguale all'arco il cui seno è uguale ad y”.La funzione arcoseno è strettamente crescente, dispari, ha dominio [−1 , 1 ] e codominio
[−π2
, π2 ]. Inoltre:
arcsen −1 =− π2
≤arcsen y≤ π2
=arcsen 1.
2) La funzione arco coseno.La funzione y = cosx è sempre decrescente nell'intervallo chiuso [0 , π ] e decresce dal valore 1
al valore −1 .Da ciò segue l'esistenza della funzione inversa che è definita in [−1 , 1 ] ed ivi è decrescente.
Questa funzione, detta arco coseno, si indica con la scrittura:x = arccosy,
che si legge: “x è uguale all'arco il cui coseno è uguale ad y”.Il codominio di arco coseno è l'intervallo [ 0 , π ] .
Esempio.Proviamo che sussiste la seguente l'identità:
arcsen y arccos y= π2
.
Infatti, se poniamo α=arcsen y , si ha che: y=sen α=cos π2
−α, facendo valere una ben nota
proprietà riguardante gli angoli complementari. Poiché: −π2
α π2
risulta pure: 0 π2
−α π
cosicché: π2
−α=arccos y e, ricordando che α = arcsen y , segue subito la tesi.
- 33 di 54 -

Classificazione dei vari tipi di funzioni
Classificazione dei vari tipi di funzioniUna funzione si può classificare entro i seguenti tipi (illustrati nel dettaglio qui sotto):
a1) FUNZIONE ALGEBRICA RAZIONALE INTERA: se è del tipo y=P ( x )=∑i=0
n
a i x i
dove Px è un polinomio nella variabile x di grado n a coefficienti a i reali;a2) FUNZIONE ALGEBRICA RAZIONALE FRATTA: se è del tipo
y=P ( x )
Q ( x )=∑i=0
n
ai x i
∑j=0
m
b j x j
, dove, come indicato, P ( x ) e Q ( x ) sono due polinomi nella
variabile x di grado, rispettivamente, n e m a coefficienti a i e b j reali ;
a3) FUNZIONE IRRAZIONALE con indice pari: se è del tipo: y=2n f x , se n∈ℕ ;a4) FUNZIONE IRRAZIONALE con indice dispari: se è del tipo:
y= 2n1 f x con n∈ℕ ;t1) FUNZIONE TRASCENDENTE TRIGONOMETRICA: se compaiono in essa
espressioni trigonometriche;t2) FUNZIONE TRASCENDENTE ESPONENZIALE: se è del tipo y=aP x oppure
y=aP x Q x con a∈ℝ+ ;
t3) FUNZIONE TRASCENDENTE LOGARITMICA: se è del tipo y=loga P x
oppure y=loga
P x Q x
con a∈ℝ+ ea≠1 .
DOMINIO DELLA FUNZIONE2a) Se la funzione è RAZIONALE INTERA y = P(x) il dominio risulta: ∀ x ∈ℝ
(ovvero: per ogni x appartenente al campo Reale ℝ) in quanto P(x) è un polinomio a coefficienti reali nell’incognita x.
2b) Se la funzione è RAZIONALE FRATTA y= P x Q x il dominio risulta: ∀ x∈ℝ
escludendo quei valori che annullano il denominatore Q(x) e cioè: Q x ≠02c) Se la funzione è IRRAZIONALE con indice del radicale pari
y=2 nPx con n∈ℕ allora si impone al radicando d'essere maggiore o uguale a zero e cioè: P x ≥0
- 34 di 54 -
Algebrico {Razionale {a1) Intero; ad es. f ( x )=−
13
x3−5 x2
−43
x−2
a2) Fratto; ad es. f ( x )=3 x2−
13
x−2
2 x²−3 x+ 4
Irrazionale{a3) se l'indice è pari: f ( x )=2n√ g ( x ) con n∈N ; ad es. y=√x 2
−1
a4) se l'indice è dispari: f ( x )=(2n+ 1 )√g ( x ) con n∈N ; ad es. y=
3√x2−3 x+ 1
Trascendente {t1) Trigonometrico ; ad es. y=sen x , y=tanx , ecc...
t2) Esponenziale ; ad es. y=ex , y=( 12 )x
, ecc...
t3) Logaritmico ; ad es. y=ln x , y=log x , y=loga x (dove a> 0 e a≠1 ) , ecc...

Classificazione dei vari tipi di funzioni
2d) Se la funzione è IRRAZIONALE con indice del radicale dispari y= 2 n1 P x allora il dominio di y coincide con quello della funzione radicando P x ;
2e) Se la funzione è TRASCENDENTE TRIGONOMETRICAy=sen f x o y=cos f x allora il dominio coincide con il dominio
dell’argo-mento f x . Se si ha y=tan f x allora occorre porre cos f x ≠0 e controllare eventuali restrizioni da imporre su f x . Gli altri casi della cotangente, secante e cosecante si trattano in modo simile a questo, considerando la natura particolare di quest’ultime tre funzioni.
2f) Se la funzione è TRASCENDENTE ESPONENZIALE y=aP x allora il dominio
coincide con il dominio della funzione che si trova all’esponente e cioè P(x)2g) Se la funzione è TRASCENDENTE LOGARITMICA y=loga P x allora si impo-
ne all'argomento del logaritmo d'essere strettamente positivo e cioè: P x 0 . Se è
y=loga
P x Q x
, con a ∈ℝ+ e a≠1 allora si impone all'argomento del logaritmo
d'essere strettamente positivo e cioè: Px Q x
0 escludendo ancora quei valori che
annullano il denominatore Q(x) e cioè (in aggiunta alla condizione precedente): Q x ≠0
- 35 di 54 -
Limiti delle funzioni reali di una variabile reale
Limiti delle funzioni reali di una variabile reale
0. IntroduzioneApprofondiamo lo studio delle funzioni reali di variabile reale e, a tale scopo, introduciamo
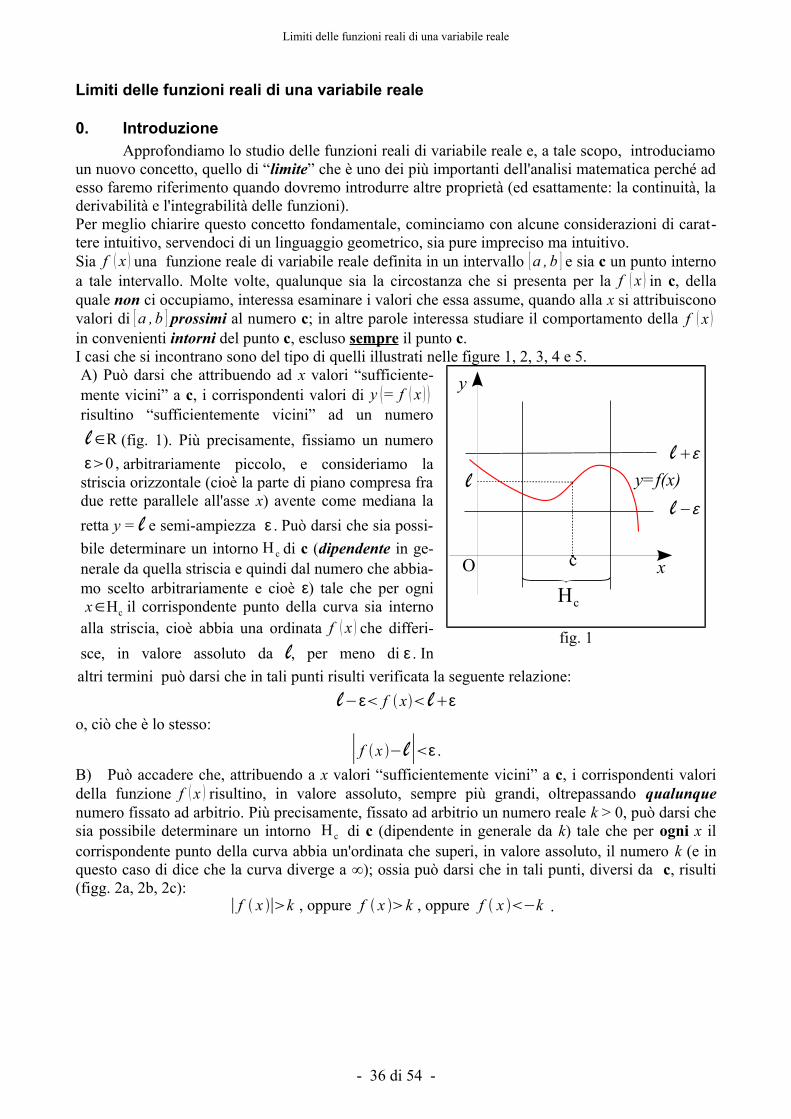
un nuovo concetto, quello di “limite” che è uno dei più importanti dell'analisi matematica perché ad esso faremo riferimento quando dovremo introdurre altre proprietà (ed esattamente: la continuità, la derivabilità e l'integrabilità delle funzioni).Per meglio chiarire questo concetto fondamentale, cominciamo con alcune considerazioni di carat-tere intuitivo, servendoci di un linguaggio geometrico, sia pure impreciso ma intuitivo.Sia f x una funzione reale di variabile reale definita in un intervallo [ a , b ] e sia c un punto interno a tale intervallo. Molte volte, qualunque sia la circostanza che si presenta per la f x in c, della quale non ci occupiamo, interessa esaminare i valori che essa assume, quando alla x si attribuiscono valori di [ a ,b ] prossimi al numero c; in altre parole interessa studiare il comportamento della f x in convenienti intorni del punto c, escluso sempre il punto c.I casi che si incontrano sono del tipo di quelli illustrati nelle figure 1, 2, 3, 4 e 5.A) Può darsi che attribuendo ad x valori “sufficiente-mente vicini” a c, i corrispondenti valori di y = f x risultino “sufficientemente vicini” ad un numero
l ∈R (fig. 1). Più precisamente, fissiamo un numero
ε0 , arbitrariamente piccolo, e consideriamo la striscia orizzontale (cioè la parte di piano compresa fra due rette parallele all'asse x) avente come mediana la
retta y = l e semi-ampiezza ε . Può darsi che sia possi-
bile determinare un intorno H c di c (dipendente in ge-nerale da quella striscia e quindi dal numero che abbia-mo scelto arbitrariamente e cioè ε) tale che per ognix ∈Hc il corrispondente punto della curva sia interno
alla striscia, cioè abbia una ordinata f x che differi-
sce, in valore assoluto da l, per meno di ε . In
c Hc
O x
y
l ε
l −ε
l y=f(x)
fig. 1
altri termini può darsi che in tali punti risulti verificata la seguente relazione:
l−ε f x lεo, ciò che è lo stesso:
∣ f x −l∣ε .
B) Può accadere che, attribuendo a x valori “sufficientemente vicini” a c, i corrispondenti valori della funzione f x risultino, in valore assoluto, sempre più grandi, oltrepassando qualunque numero fissato ad arbitrio. Più precisamente, fissato ad arbitrio un numero reale k > 0, può darsi che sia possibile determinare un intorno H c di c (dipendente in generale da k) tale che per ogni x il corrispondente punto della curva abbia un'ordinata che superi, in valore assoluto, il numero k (e in questo caso di dice che la curva diverge a ∞); ossia può darsi che in tali punti, diversi da c, risulti (figg. 2a, 2b, 2c):
∣ f x ∣k , oppure f x k , oppure f x −k .
- 36 di 54 -

Limiti delle funzioni reali di una variabile reale
cO x
y
y=f(x)k
- k
Hc
cO x
y
y=f(x)k
- k
Hc
cO x
y
y=f(x)k
- k
Hc
fig. 2a fig. 2b fig. 2cC) Il comportamento descritto in alle prime due lettere A) e B) può presentarsi, anziché in un conveniente intorno completo di c, in un conveniente intorno destro Hc
+ o sinistro del
punto c e cioè Hc- (fig. 3).
fig. 3
D) Inoltre, in alcuni casi, se assegniamo valori sufficientemente grandi alla x, i valori corrispon-
denti di y tendono ad un valore finito l (fig. 4).
fig. 4
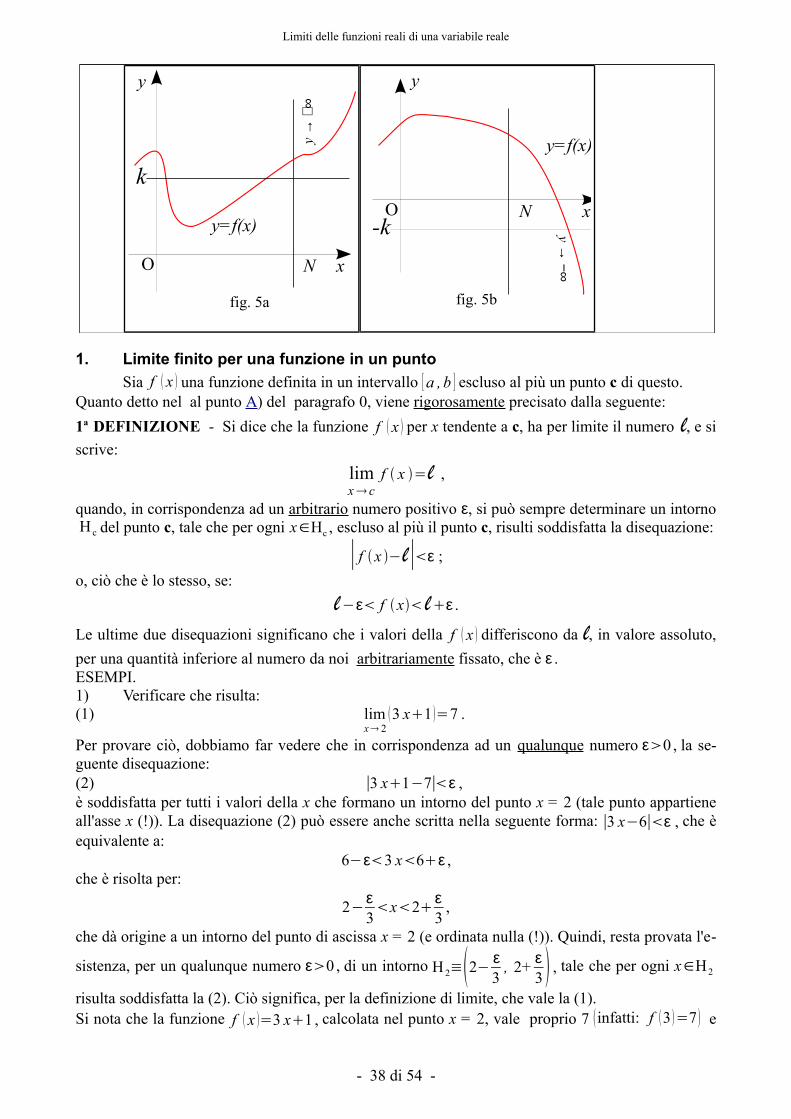
E) Infine, può capitare che, attribuendo a x valori “sufficientemente grandi” i corrispondenti valo-ri diventino, in valore assoluto, sempre più grandi, oltrepassando qualunque numero fissato ad arbitrio (fig. 5a e fig. 5b).
- 37 di 54 -
l + ε
l - ε
NO x
y
y=f(x)
y → l
cO x
y
y=f(x)l 2
Hc
l 1y=f(x)
Hc
−
Limiti delle funzioni reali di una variabile reale
NO x
y
y=f(x)
y →
+∞
k
fig. 5a
NO x
y
y=f(x)
y → −∞
-k
fig. 5b
1. Limite finito per una funzione in un punto
Sia f x una funzione definita in un intervallo [ a ,b ] escluso al più un punto c di questo.Quanto detto nel al punto A) del paragrafo 0, viene rigorosamente precisato dalla seguente:
1a DEFINIZIONE - Si dice che la funzione f x per x tendente a c, ha per limite il numero l, e si
scrive:
limx c
f x =l ,
quando, in corrispondenza ad un arbitrario numero positivo ε, si può sempre determinare un intorno H c del punto c, tale che per ogni x∈Hc , escluso al più il punto c, risulti soddisfatta la disequazione:
∣ f x −l∣ε ;
o, ciò che è lo stesso, se:
l−ε f x lε .
Le ultime due disequazioni significano che i valori della f x differiscono da l, in valore assoluto,
per una quantità inferiore al numero da noi arbitrariamente fissato, che è ε .ESEMPI.1) Verificare che risulta:(1) lim
x 2 3 x1 =7 .
Per provare ciò, dobbiamo far vedere che in corrispondenza ad un qualunque numero ε0 , la se-guente disequazione:(2) ∣3 x1−7∣ε ,è soddisfatta per tutti i valori della x che formano un intorno del punto x = 2 (tale punto appartiene all'asse x (!)). La disequazione (2) può essere anche scritta nella seguente forma: ∣3 x−6∣ε , che è equivalente a:
6−ε3 x6ε ,che è risolta per:
2− ε3
x2 ε3
,
che dà origine a un intorno del punto di ascissa x = 2 (e ordinata nulla (!)). Quindi, resta provata l'e-
sistenza, per un qualunque numero ε0 , di un intorno H 2≡2− ε3
, 2+ε3 , tale che per ogni x ∈H2
risulta soddisfatta la (2). Ciò significa, per la definizione di limite, che vale la (1).Si nota che la funzione f x =3 x1 , calcolata nel punto x = 2, vale proprio 7 infatti: f 3 =7 e
- 38 di 54 -

Limiti delle funzioni reali di una variabile reale
perciò in questo caso risulta: limx 2
f x = f 2
cioè: il limite coincide con il valore della funzione nel punto di ascissa x = 2 .2) Dimostrare che è :
limx 4
xx−2
= 2 .
Per provare l'uguaglianza precedente, fissiamo ε0 . Dopo si deve far vedere che esiste un intorno di 4 (e cioè H4), tale che, per ogni x ∈H4, x≠4 , si abbia:
(1) ∣ xx−2
−2∣ε ,
ossia:
∣4−xx−2∣ε ;
e quindi:
−ε 4− xx−2
ε .
Da questa disequazione possiamo ricavare un sistema di due disequazioni confrontando, rispettiva-mente, il primo e il secondo termine e il secondo e il terzo termine e cioè:
{ 4−xx−2
ε
−ε 4−xx−2
ovvero:
(2) { 4−xx−2
ε
4− xx−2
−ε.
Potendo supporre x −20 , (perché?), il sistema (2) si può scrivere:
{4−xε x−2ε4−x2ε−ε x
da cui: {x ε142εx ε−12ε−4
,
ossia, assumendo (senza perdere nulla in generalità), ε1 e quindi ε−10 , risulta:
(3) {x 42 εε1
x 2ε−4ε−1
.
Il sistema (3), essendo:
42εε1
2ε−4ε−1
,
è verificato per:
(4) 42εε1
x 2 ε−4ε−1
.
Con semplici operazioni, arriviamo a scrivere le disequazioni (4) in una forma migliore, cioè:
4− 2 εε1
x4 2 ε1−ε
che ci consente di comprendere che effettivamente si è formato un intorno del punto 4.
- 39 di 54 -

Limiti delle funzioni reali di una variabile reale
Esercizi:1) Provare che, se a∈R e a > 1, risulta:
limx 0
ax=1 .
2) Provare che, se a∈R, a > 0 e a≠1 , risulta:limx 1
log a x=0 .
Osservazione. Negli esempi sopra riportati il valore del limite per x→c coincide con il valore della
funzione per x = c cioè: limx c
f x = f c =l .Bisogna però osservare che l'esistenza del limite di una funzione, in un dato punto c, è indipendente dal comportamento della funzione in quel punto. In altre parole, può accadere che nel punto c esista il limite della funzione, oppure che esista anche il valore della funzione in questo punto e questo sia
diverso dal valore del limite, cioè sia l≠ f c . E tutto questo perché l'esistenza del limite nel punto
c non richiede necessariamente che la disequazione (1) debba essere soddisfatta per x = c. Da qui segue che se due funzioni f x e g x assumono gli stessi valori per ogni x≠c e se, per es. si ha:
limx c
g x= l , allora risulta anche:
limx c
f x =l .
ESEMPIOVerificare che risulta:
limx 2
x2−4x−2
= 4 .
Dobbiamo dimostrare che, ∀ ε0 , la disequazione:
(1) ∣x2−4x−2
−4∣ε
è soddisfatta per tutti i valori di x che formano un intorno del punto di ascissa 2, escluso x = 2 dove la funzione non è definita.Ma poiché per x≠2 si ha:
x2−4x−2
= x−2 x2
x−2 = x 2 ,
la disequazione (1) equivale alla: 2−εx2ε ,
che è proprio un intorno del punto x = 2.Si nota che per x = 2 non esiste il valore della funzione, mentre nel punto x = 2 esiste finito il limi-te.ESERCIZI
Verificare che risulta :
a) limx 3
x2−5 x 6
x2−9= 1
6;
b) limx 3
x−3
x−3=2 3 .
2. Definizione di limite infinito per una funzione in un puntoIl comportamento della funzione descritto al punto B) del primo paragrafo viene rigorosamente pre-cisato dalla seguente:
2a DEFINIZIONE Si dice che la funzione f x per x tendente a c, ha per limite l'infinito (oppure che diverge all'infinito), e si scrive:
- 40 di 54 -

Limiti delle funzioni reali di una variabile reale
limx c
f x =∞ ,
quando, in corrispondenza ad un arbitrario numero reale positivo M, si può trovare sempre un intor-no H c del punto c tale che per ogni x ∈Hc , x≠c , risulta:
∣ f x ∣M , cioè la f x assume valori, in modulo, maggiori di M.Se in H c , escluso c, vale invece sempre la disequazione:
f x M ,si ha che :
limx c
f x = + ∞ ;
se invece vale la disequazione:f x −M ,
si ha che:
limx c
f x = −∞.
ESEMPIOVerifichiamo che risulta:
limx 0
− 1x =∞ .
A tale scopo, bisogna far vedere che la dise-quazione:
(1) ∣−
1x∣M ,
è soddisfatta, qualunque sia il numero M > 0, da valori che formano un intorno del punto 0, escluso il punto 0.La (1), infatti, equivale alla:
∣x∣ 1M
,
che è soddisfatta quando:
−
1M
x 1M
,
e questi valori formano un intorno H0 del punto 0. Il grafico della funzione è riportato qui a destra (fig. 6).
fig. 6
ESERCIZIOVerificare che risulta:
limx 1
1
1−x 2=+ ∞ .
3. Limite destro e sinistro di una funzione.
Può accadere che non esista il limite di f x per x→c, ma un tale limite esista quando si con-siderino solo i valori di f x che appartengono ad un intorno destro: c < x < c + δ (δ ∈R+) del punto c (ancora privato, ovviamente, del punto c), oppure ad un intorno sinistro: c−δxc .Si dà quindi la seguente:
3a DEFINIZIONE. Si dice che il numero l è il limite destro della funzione f x , per x→c, e si
scrive:
limx c
f x = l ,
- 41 di 54 -
M
- M
H0

Limiti delle funzioni reali di una variabile reale
quando, in corrispondenza a un arbitrario numero reale positivo ε, si può sempre trovare un intorno destro H c del punto c tale che per ogni x∈Hc , escluso eventualmente il punto c, risulti soddisfatta la disequazione:
∣ f x −l∣ε .
Se l'intorno H c , invece, è un intorno sinistro del punto c, allora si dice che il numero l è il limite si-
nistro di f x , per x→c, e si scrive:
limx c−
f x = l .
Analoghe definizioni si possono dare per i limiti:lim
x c−f x =∞ e lim
x cf x =∞.
Si può dimostrare che se i limiti destro l 1 e sinistro l 2 esistono e sono uguali, cioè l 1=l 2=l allora
l è il limite di questa funzione (per x→c) nel senso della 1a definizione. Viceversa, se una funzione
ha per limite l, per x→c, allora i limiti destro e sinistro di queste funzioni x c± esistono e sono
uguali.ESEMPIO
Sia data la funzione: y=2 x∣x∣x
. Verificare che risulta:
(1) limx 0
−f x =−1 e lim
x 0
f x =1 .
Per provare la prima delle (1), si osserva che, dovendo calcolare il limite sinistro della funzione f x per x tendente a 0, ci interessano solo i valori negativi della x: per tali valori essendo∣x∣=−x , la funzione data diventa:
2 x−xx
=2 x−1 .
Premesso ciò, dobbiamo fare vedere che il sistema:
{∣2 x−1−−1∣εx0
, con ε0 arbitrario,
ammette soluzioni che formano un intorno sinistro del punto 0, escluso al più lo 0. Risolvendo il si-
stema, si trova che è soddisfatto per: − ε2
x0 ,
e tali soluzioni formano proprio un intorno sinistro dello 0. In modo del tutto analogo, tenendo pre-sente che per x > 0 si ha ∣x∣= x , si prova che vale la seconda delle (1). Possiamo quindi affermare
che la funzione f x =2 x ∣x∣x
, nel punto 0 non
ammette limite, né esiste il valore della funzione in tale punto; pur tuttavia, sempre nello stesso punto, esiste il limite sinistro e destro e valgono, rispettivamente, −1 e 1.
fig. 7
Il grafico della funzione data è rappresentato nel grafico di fig. 7.Esercizio.
Se a∈R e a > 1, verificare che risulta:lim
x 0
loga x=−∞ .
- 42 di 54 -

Limiti delle funzioni reali di una variabile reale
4. Definizione di limite per una funzione all'infinitoIl comportamento della funzione descritto alla lettera D) del primo paragrafo, viene rigoro-
samente precisato dalle seguenti:4a DEFINIZIONE . Si dice che la funzione f x , per x tendente all'infinito, ha per limite il numero
l, e si scrive:
limx∞
f x =l ,
quando, in corrispondenza a un arbitrario numero ε0 , si può determinare un numero N > 0, tale che per ogni x che verifica la condizione:(1) ∣x∣N ,si abbia:
∣ f x −l∣ε ,
cioè i corrispondenti valori della f x differiscano tutti da l, in valore assoluto, meno di ε .
Se la (1) è soddisfatta soltanto per x N , oppure soltanto per x−N , allora si dice che esistono, rispettivamente, i limiti:
limx + ∞
f x =l e limx - ∞
f x= l .
5a DEFINIZIONE. Si dice che per x tendente all'infinito la funzione f x ha per limite l'infinito, e si scrive:
limx ∞
f x =∞ ,
quando, in corrispondenza a un arbitrario M > 0, è sempre possibile determinare un numero N > 0, tale che per ogni x verificante la condizione:
∣x∣ N ,si abbia:
∣ f x ∣ M ,cioè i corrispondenti valori della f x siano tutti, in valore assoluto, maggiori di M.Se invece per ∣x∣N risulta sempre f x M , oppure f x −M , allora si dirà che esistono rispet-tivamente i limiti:
limx ∞
f x =∞, limx ∞
f x=−∞ .
Se per x > N risulta sempre ∣ f x ∣ M , oppure f x M , oppure f x −M , allora si dice che esistono rispettivamente i limiti:
limx ∞
f x =∞ , limx ∞
f x=∞ e limx ∞
f x=−∞ .
Se, infine, per x−N risulta sempre ∣ f x ∣ M , oppure f x M , oppure f x −M , allora si dice che esistono rispettivamente i limiti:
limx −∞
f x =∞ , limx −∞
f x=∞ e limx −∞
f x=−∞ .
ESEMPIOVerifichiamo che risulta:
(1) limx∞ x1
x =1.
Per provare quanto scritto sopra, in base alla definizione 4a, dobbiamo dimostrare che la disequazio-ne:
(2) ∣x1x
−1∣ε ,
qualunque sia ϵ> 0 , è soddisfatta per valori della x che risultano, in valore assoluto, maggiori di un certo numero positivo N (che dipende da ϵ ).
La disequazione (2) è equivalente alla disequazione: ∣1x∣< ϵ , che è soddisfatta quando si verifica
- 43 di 54 -

Limiti delle funzioni reali di una variabile reale
che:
∣x∣>1ϵ=N ,
e ciò prova la (1). Il grafico della funzione è quello riportato in fig. 8.
fig. 8ESERCIZI1) Verificare che risulta:
limx - ∞
1− x =∞ .
2) Se a∈R+ e a > 1, verificare che risulta:lim
x - ∞a x=0 , lim
x + ∞ax =+ ∞ e lim
x + ∞loga x =+ ∞ .
5. Definizione di limite in termini di intorniLa definizione di limite data in precedenza si può riscrivere in termini di intorni nella se-
guente maniera.Sia A un sottoinsieme di R e c∈R. Il punto c si dice che è un punto di accumulazione di A quando in ogni intorno di c cadono infiniti punti di A. Ad esempio se consideriamo l'insieme di numeri reali:
A={x∣x= 1n
,n∈N} ,
si può dimostrare che 0 è un punto di accumulazione di A. Sia f: A→B (dove A, B ⊆ R) e c un punto di accumulazione di A. Si dice che la funzione f tende
verso l, per x→c, e si scrive:
limx c
f x= l ,
quando, dato un qualunque intorno U di l, esiste sempre un intorno V di c, tale che si abbia:
∀ x∈V∩A ∖ {c }⇒ f x ∈U .
Questa definizione possiede il vantaggio di applicarsi sia al caso in cui l è sostituito da uno dei sim-
boli: ∞ , ∞ , −∞ sia nel caso in cui c è sostituito da uno di tali simboli. 6. Teoremi fondamentali sui limiti
In questo paragrafo dimostreremo alcuni importanti teoremi sui limiti, e per semplicità, con-sidereremo solo i casi in cui i limiti, per x→c, sono finiti. Con semplici cambiamenti è possibile estendere tali dimostrazioni anche ai casi in cui il limite sia ∞, e quando x→∞.Teorema 6.1 Unicità del limite.Se esiste il limite della funzione f x , per x→c, tale limite è unico.
- 44 di 54 -
y=1+ε
y=1-εy=1

Limiti delle funzioni reali di una variabile reale
Dim. Supponiamo per assurdo che invece esistano, per x→c, due limiti l 1 e l 2 , con l 1≠l 2 . Pos-
siamo supporre, senza perdere niente in generalità, l 1l 2 . Per la definizione di limite, ∀ ε0 ,
scelto arbitrariamente, devono esistere due intorni H1 e H2 di c , tali che per ogni x∈H1 x≠c si abbia:
(1) l 1−ε f x l 1ε
e, per ogni x ∈H2 x≠c si abbia:
(2) l 2−ε f x l 2ε .
Nell'intorno H c=H1∩H2 (ved. fig. 9) le relazioni scritte sopra devono valere si-multaneamente.
c Hc
H1
H2
fig. 9
Possiamo scegliere un ε abbastanza piccolo perché risulti:
l 1ε l 2−ε 3 cioè:ε l 2−l 1
2 .Questa disuguaglianza ci permette di trovare il legame che unisce la (1) alla (2) in modo tale che possiamo scrivere:
(3) l 1−ε f x l 1ε l 2−ε f x l 2ε ,
che costituisce una relazione chiaramente assurda poiché confrontandone il secondo e il quinto ter-mine si ottiene:
f x f x . Da qui, dunque, discende l'unicità del limite.•Si è così provato che una funzione in un punto c non può avere due limiti finiti distinti. Ma con un ragionamento analogo al precedente, si può provare che nel punto c la funzione non può avere con-temporaneamente per limite ∞ e −∞, e nemmeno un limite finito e uno infinito. E così pure si prova il teorema se c è ∞ o ∞ o −∞ .Teorema 6.2 Teorema della permanenza del segno.
Se per x tendente al numero c la funzione f x tende ad un limite finito l non nullo, esiste un intor-
no del punto c per ogni x del quale, escluso al più il punto c, la funzione assume valori dello stesso segno del suo limite.
Dim. Per ipotesi si ha che: limx c
f x= l≠0 . Per provare la tesi, osserviamo innanzi tutto che essen-
do, per ipotesi, l ≠ 0, risulta: ∣l∣0 . Preso allora ε=∣l∣, per definizione di limite, in corrispondenza
di questo numero, esiste un intorno Hc del punto c (ved fig. 10), tale che per ogni x ∈Hc , xc ,risulta:
(1) l−∣l∣ f x l∣l∣.
fig. 10
Esaminiamo, uno per uno, i due casi possibili. Nel primo caso, se è l > 0 sarà anche ∣l∣=l ovvero
l−∣l∣=0 e, dalla (1), segue: f x 0 . Analogamente, nel secondo caso, se è l < 0 sarà anche
3 Per esempio, se abbiamo due numeri distinti (ad es. 4 e 5) è evidente che 4 < 5. Ciò non toglie che se aggiungiamo una quantità arbitraria a 4 e
togliamo la stessa quantità a 5 la relazione d'ordine precedente continua ancora a valere. Infatti: 4 110
5− 110
.
- 45 di 54 -
c Hc

Limiti delle funzioni reali di una variabile reale
∣l∣=−l ovvero l∣l∣=l−l =0 e, ancora dalla (1), segue: f x 0 . Poiché x∈Hc, escluso al più il
punto c, da questi due risultati segue la validità della tesi.•Oss. Il teorema vale ancora se è l=∞ o l=−∞ .
Teorema 6.3 Criterio del confronto.Se f x , h x e g x sono tre funzioni definite nello stesso intervallo, eccettuato al più il punto c di questo, e se per ogni x risulta:
(1) f x ≤h x ≤ g x ,e se, inoltre, è :
(2) limx c
f x= limx c
g x= l ,
allora risulta anche:
limx c
h x=l .
Dim. Per la definizione di limite, applicata alla prima delle (2), in corrispondenza di un numero ε0 , fissato ad arbitrio, possiamo determinare un intorno H1 del punto c tale che per ogni x ∈H1 ,
x diverso da c, risulta: ∣ f x −l∣ε , ossia:
(3) l−ε f x l ε .
Sempre per la definizione di limite, applicata alla seconda delle (2), in corrispondenza di un nume-ro ε0 , fissato ad arbitrio, possiamo determinare un intorno H 2 del punto c tale che per ognix ∈H2 , x diverso da c, risulta:
(4) l−ε g x lε .
Posto H c=H1∩H2 , per ogni x ∈Hc diverso da c, valgono simultaneamente la (3) e la (4). Tenendo conto delle (1), (3) e (4), per ogni x ∈Hc diverso da c, si ha :
l−ε f x ≤h x ≤g x lε ,
da cui segue immediatamente che:
l −εh x l ε , e, dalla definizione di limite, si ha che:
(5) ∣h x −l∣ε .
Così si è dimostrato che in corrispondenza di un numero ε0 , fissato arbitrariamente, esiste un in-torno H c del punto c tale che per ogni x ∈Hc , x diverso da c, vale la (5). Ma, in base alla definizione di limite, possiamo scrivere che:
limx c
h x= lche prova la validità della tesi.•
Il teorema continua a valere se l è ∞ o −∞.
ESERCIZIO.Proviamo che:
(1) limx 0
senx=0 ,
e:(2) lim
x 0cosx=1.
Dim. Infatti, per valori della x non nulli e in valore assoluto minori diπ2
, si ha: 0∣senx∣∣x∣ e
- 46 di 54 -

Limiti delle funzioni reali di una variabile reale
poiché limx 0
∣x∣=0 , per il teorema 6.3 possiamo anche scrivere: limx 0
senx=0 , che prova la (1).
Per provare la (2), consideriamo la ben nota uguaglianza:
cosx=1−2 sen2 x2
.
Siccome il limite di una costante è la costante stessa e, come vedremo in seguito, il limite della dif -ferenza di due funzioni è uguale alla differenza dei limiti (se essi sono finiti) delle due funzioni, si ha, facendo valere il risultato precedente:
limx 0
cosx=limx0
1−2 sen2 x2 =1−0=1.
7. Infinitesimi e loro proprietà fondamentali
In questo paragrafo studiamo le funzioni il cui limite vale 0, ottenendo risultati utili anche perché semplificano le dimostrazioni dei teoremi successivi sui limiti.DEFINIZIONE. Si dice che la funzione f x è un infinitesimo per x→c (o per x→∞), quando risulta: lim
x cf x =0 , oppure lim
x ∞f x=0.
Ne segue che quando una funzione è infinitesima ed è, per es. limx c
f x =0 , allora, per definizione
di limite, in corrispondenza ad un arbitrario numero ε > 0 è possibile determinare un intorno Hc di c, tale che per ogni x∈Ηc, escluso al più il punto c, si ha: ∣ f x ∣ε . Le funzioni infinitesime, per po-terle distinguere dalle altre, saranno indicate con scritture abbreviate del tipo:
α [ =α x ] e β [= β x ] , e così via.ESEMPI.1) La funzione: α x = x−3 2 è infinitesima per x 3, in quanto:
limx 3
x−3 2=0 .
2) La funzione: α x = 1x
è infinitesima per x→∞, perché:
limx ∞
1x
=0 .
Valgono i seguenti teoremi.Teorema 7.1 Se una qualunque funzione f x è tale che:
(1) limx c
f x= l ,
allora ciò equivale a dire che, in un opportuno intorno di c:
(2) f x =α x l ,
dove α x è infinitesima per x→c.Dim. Infatti, se vale il limite (1), allora in corrispondenza ad un numero ε0 fissato arbitraria-
mente, esiste un intorno Hc di c, per ogni x del quale, (escluso c), vale: ∣ f x −l∣ε , e, posto
α x = f x −l , si può scrivere:
∣α x ∣ε , per ogni x ∈Hc , e ciò prova che lim
x cα x =0.
Viceversa, se vale la (2), allora è: ∣α x ∣=∣ f x−l∣, e se limx c
α x=0 , allora in corrispondenza ad
un arbitrario ε0 , è possibile determinare un intorno H c di c, per ogni x del quale (escluso al più il
punto c), risulta: ∣α x ∣ε , cioè ∣ f x −l∣ε , che prova che limx c
f x =l . •
Teorema 7.2 Se risulta:
- 47 di 54 -

Limiti delle funzioni reali di una variabile reale
(1) limx c
α x =0 .
ed esiste un intorno H c di c, per ogni x del quale (escluso al più c) risulta: α x ≠0 , allora è:(2) lim
x c
1α x
=∞ .
Dim. Infatti, se vale il limite (1), significa che in corrispondenza ad un numero arbitrario ε0 , esiste un intorno H c di c, per ogni x del quale, (eccetto al più il punto c), risulta: ∣α x ∣ε , e per
ogni x dell'intorno H∩H c di c si ha anche: ∣ 1α x ∣ε , e, posto 1
ε=M , quest'ultima uguaglianza
prova che vale il limite (2).•Teorema 7.3 La somma algebrica di un numero finito di infinitesimi è anch'essa infinitesima.Dim. Proviamo il teorema solo nel caso di due funzioni, poiché la dimostrazione resta la stessa an-che per un numero maggiore di infinitesimi. Dunque si deve provare che se è:(1) lim
x cα x =0 e lim
xcβx =0 ,
allora, posto u x =α x β x , risulta:(2) lim
x cu x=0.
Infatti, se valgono i limiti (1), allora fissato ad arbitrio un numero ε > 0, in corrispondenza a tale nu-mero esiste certamente, per definizione di limite, un intorno H1 del punto c, tale che per ognix ∈H1 , (escluso al più il punto c), risulta:
(3) ∣α x ∣ ε2
,
e, per la stessa ragione, esiste un intorno H 2 di c tale che per ogni x ∈H 2 (escluso al più il punto c), risulta:
(4) ∣β x ∣ ε2
,
Posto H=H1∩H2 (ved. Fig 9), per ogni x ∈H diverso da c, valgono contemporaneamente la (3) e la (4) e quindi:
∣α x ∣∣β x ∣ε , e, a maggior ragione4 vale anche:(5) ∣α x β x ∣ε .Fissato un qualunque ε0 , abbiamo visto che in corrispondenza a tale numero esiste un intorno H c di c, per ogni x del quale, escluso c, vale la (5). Ma ciò significa che la funzione:
u x =α x β x ,per x→c, tende a zero. Da qui deduciamo che vale la (2).•Analogamente si prova il teorema nel caso in cui:
limx ∞
α x =0
e:limx∞
βx =0.
Teorema 7.4 Il prodotto di un infinitesimo α x per una funzione limitata f x , è un infinitesimo per x→c, (o per x→∞).Dim. Proviamo il teorema nel caso in cui x→c. Se la funzione f x è limitata per x→c, allora esiste un numero M > 0, tale che:(1) ∣ f x ∣≤ M ,per ogni x di un opportuno intorno H1 di c. Inoltre, se α x è infinitesimo, allora in corrispondenza ad un arbitrario ε0 , è possibile determinare un intorno H 2 di c, per ogni x del quale, escluso c, si
4 Infatti, per la disuguaglianza triangolare, dati due qualunque numeri reali a e b, si ha: ∣a+ b∣≤∣a∣ + ∣b∣ .
- 48 di 54 -

Limiti delle funzioni reali di una variabile reale
ha:
(2) ∣α x ∣ εM
.
Dalla (1) e dalla (2) segue che per ogni x ∈H=H1∩H2 (escluso c), si ha:
∣α x ⋅ f x ∣ εM
⋅M =ε ,
che prova che il prodotto: α x ⋅ f x è infinitesimo.•La dimostrazione è del tutto analoga per il caso in cui x→∞.ESEMPIO.
Dimostriamo che: limx ∞
senxx
=0.
Essendo limx ∞
1x
=0 e ∣senx∣≤1 per ogni x∈R, per il teorema 7.4, si ha subito:
limx ∞
senxx
=0.
Allo stesso modo si dimostra che:
limx 0
x⋅senx1x
=0.
Corollario 7.1 Se è:limx c
α x =0
e:limx c
β x =0 ,
allora risulta:limx c
[α x⋅β x ]=0 .
Infatti, β x è una funzione limitata per x→c. Questo risultato si estende ad un numero qualunque di infinitesimi.Corollario 7.2 Se è lim
x cα x =0 e k = costante, allora risulta:
limx c
α x =0 .
Corollario 7.3 Il quoziente:α x f x
, tra un infinitesimo α x e una funzione f x , il cui limite è
diverso da zero, è un infinitesimo.
8. Operazioni con i limitiIn questo paragrafo elenchiamo i più importanti teoremi relativi alle operazioni sui limiti (le
proprietà saranno provate nel paragrafo successivo).
Se risulta: limx c
f x =l 1 e limx c
g x= l 2 con l 1 e l 2 numeri reali, allora si ha:
1°) limx c
[ f x ±g x ]=l 1±l 2 ;
2°) limx c
[ f x ⋅g x ]=l 1⋅l 2 ;
3°) se l 2≠0 si ha: limx c [ f x
g x ]= l 1
l 2
;
4°) limx c
∣ f x ∣=∣l 1∣;
5°) se è: limx c
f x =l 1 , limx c
g x=∞ ,
- 49 di 54 -

Limiti delle funzioni reali di una variabile reale
oppure: limx c
f x =∞ , limx c
g x =∞ ,
oppure: limx c
f x =−∞, limx c
g x =−∞ ,
allora il limite della somma è, rispettivamente, ∞ , ∞ , −∞ ;
6°) se è: limx c
f x =l 1≠0 , limxc
g x=∞ ,
oppure: limx c
f x =∞ , limx c
g x =∞ ,
risulta: limx c
[ f x ⋅g x ]=∞ ;
7°) se è: limx c
f x =∞ e limx c
g x=l 2 l 2≠0, ∞ ,
risulta: limx c [ f x
g x ]=∞ ;
8°) Se è: limx c
f x =l 1 l 1≠0,∞ e limx c
g x =∞ ,
risulta: limx c [ f x
g x ]=0 ;
9°) Se è: limx c
f x =l 1 l 1≠0, ∞ e limx c
g x =0 ,
con g x ≠0 in un opportuno intorno del punto c, allora risulta:
limx c [ f x
g x ]=∞ .
9. Dimostrazioni dei teoremi sui limitiProviamo qui alcuni dei teoremi enunciati nel paragrafo precedente.
Teorema 9.1 Se f x e g x sono due funzioni definite nello stesso intervallo, eccettuato al più il punto c di questo, e se esistono e sono finiti i limiti di queste due funzioni per x→c, allora anche la loro somma ha limite finito e coincide con la somma dei limiti.
Dim. Siano: limx c
f x =l 1 e limx c
g x= l 2 . Allora per il teorema 7.1, possiamo scrivere:
f x =l 1α x e g x =l 2β x ,dove α e β sono funzioni infinitesime. Pertanto si ha (sommando membro a membro):
f x g x = l 1l 2 α x β x .Poiché l 1l 2 è una costante e α x β x è un infinitesimo, essendo somma di infinitesimi,
sempre applicando il risultato del teorema 7.1, si può scrivere:
limx c
[ f xg x ]= l 1 l 2 .•
Teorema 9.2 Nelle ipotesi del teorema 9.1, il limite del prodotto coincide con il prodotto dei limiti delle singole funzioni.Dim. Posto, come nel teorema precedente,
f x =l 1α x e g x =l 2β x ,si ha (moltiplicando membro a membro):
f x ⋅g x = l 1α x l 2β x =l 1⋅l 2l 1β x l 2 α x α x β x .
Il prodotto l 1⋅l 2 è costante e, per i teoremi del paragrafo 7, l'espressione:
l 1 β x l 2α x α x β x è infinitesima (per x→c). Pertanto risulta:
- 50 di 54 -

Limiti delle funzioni reali di una variabile reale
limx c
[ f x ⋅g x ]= l 1⋅l 2 .In particolare, se k è una costante, si ha:
limx c
[ k⋅ f x ]=k limx c
[ f x ]=k l 1 .•
Teorema 9.3 Se alle ipotesi del teorema 9.1, si aggiunge l'ulteriore ipotesi che sia l 2≠0 , allora
esiste anche il limite del quoziente ed è uguale al quoziente dei limiti delle singole funzioni.Dim. Posto, come nei teoremi precedenti:
f x =l 1α x e g x =l 2β x ,consideriamo l'identità:
f x g x
=l
1α x
l 2β x=
l1
l 2
l 1α x
l 2β x−
l1
l 2= l
1
l 2
l
2⋅α x−l 1 β x
l2⋅ l 2
β x,
da cui:
f x g x
=l 1
l 2
l 2⋅α x −l 1βx
l2⋅ l 2
β x.
Si nota che la frazionel 1
l 2
è una costante e la frazionel
2⋅α x−l 1β x
l2⋅ l 2
β x, è un infinitesimo (per il
corollario 7.3) perché l 2⋅α x −l 1 βx è un infinitesimo, mentre il limite del denominatore è
uguale a l 2
2≠0 . Pertanto vale la tesi e cioè:
limx c
f x g x
=l 1
l 2
. •
Teorema 9.4 Se risulta:
limx c
f x= l ,
è anche:
limx c
∣ f x ∣=∣l∣ .
Dim. In base alla definizione di limite, in corrispondenza ad un numero ε0 , arbitrariamente fis-sato, esiste un intorno H c del punto c tale che per ogni x ∈Hc , escluso al più il punto c, risulta:
∣ f x −l∣ε .
Poiché:
∣∣ f x ∣−∣l∣∣≤∣ f x− l∣,
allora, a maggior ragione, per ogni x ∈Hc , escluso al più il punto c, si ha:
∣∣ f x ∣−∣l∣∣ε ,
e quindi la tesi vale.•Osservazioni importanti.1°) Ricordiamo che nulla si può dire, in generale, sul lim
x c[ f xg x ] , quando è:
limx c
f x =∞ e limx c
g x =−∞ ; sul limx c
[ f x ⋅g x ] , quando è: limx c
f x=0 e limx c
g x =∞ ;
- 51 di 54 -

Limiti delle funzioni reali di una variabile reale
sul limx c
f x g x
, quando è: limx c
f x =0 e limx c
g x=0 ; sul limxc
f x g x
, quando è: limxc
f x=∞ e
limx c
g x =∞ . Quindi i teoremi che abbiamo sopra dimostrato, perdono di significato quando i limiti
considerati si presentano sotto una delle forme:
∞−∞ ; 0⋅∞ ; 00
; ∞∞
,
che vanno sotto il nome di “forme indeterminate”, perché di un limite che si presenta sotto una di queste forme non si può dire a priori, quando esiste o quanto valga.
2°) Si deve tener presente che i simboli: ∞ , ∞ , −∞ non rappresentano numeri e non hanno senso se non in relazione con un limite. Perciò sono assurde le scritture:
5∞=0;
∞
4=∞ ;
30=∞,
proprio perché il simbolo ∞ non rappresenta un numero. Tuttavia, per comodità di scrittura, a volte si usa sintetizzare i teoremi dimostrati nel paragrafo precedente con scritture simboliche del tipo:
∞ ∞ =∞ ; −∞ −∞ =−∞ ; ∞ l =∞ ; ∞ ⋅∞ =∞ ; −∞ ⋅−∞ =∞ ; 1
±∞=0. Se l ≠ 0, si usa anche scrivere simbolicamente: ∞ ⋅l=∞ , dove ∞ avrà il segno di l;
∞ l
=∞ , dove, come prima, ∞ avrà il segno di l. Quindi il simbolo ∞ non è un numero e le nota-
zioni precedenti sono solamente delle forme simboliche abbreviate degli enunciati dei teoremi a cui si riferiscono.
I teoremi 7.1 .. 7.4 ci assicurano che, quando esistono finiti i limiti delle due funzioni f x e g x in un punto c, nello stesso punto, esiste finito il limite della somma, differenza, prodotto e quoziente (ovviamente, deve essere lim
x cg x≠0 , g x ≠0 ). Bisogna però far presente che possono non valere
i teoremi inversi e precisamente: può benissimo esistere finito il limite della somma, differenza, prodotto e quoziente di due funzioni, senza che necessariamente debba esistere il limite delle singole funzioni.
ESEMPI.1) Consideriamo le seguenti due funzioni, definite per x≠0:
f x =sen2 1x
e g x=cos2 1x
.
Evidentemente nessuna delle due funzioni ammette limite per x→0 , perché in qualunque intorno di x= 0, esse compiono infinite oscillazioni sempre di ampiezza 1. Però la funzione somma:
s x=sen2 1x
cos2 1x
vale sempre 1 ∀ x≠0, ammette limite x→0 e questo limite vale 1.2) La funzione definita dalla legge:
f x ={2 ∀ x2 ;3 ∀ x≥2 ;
non ammette limite per x→ 2, perché limx 2−
f x =2 , limx 2
f x =3 . Così pure non ammette limite
per x→ 2, la funzione g x =[ x ]=E x definita dalla legge:
- 52 di 54 -
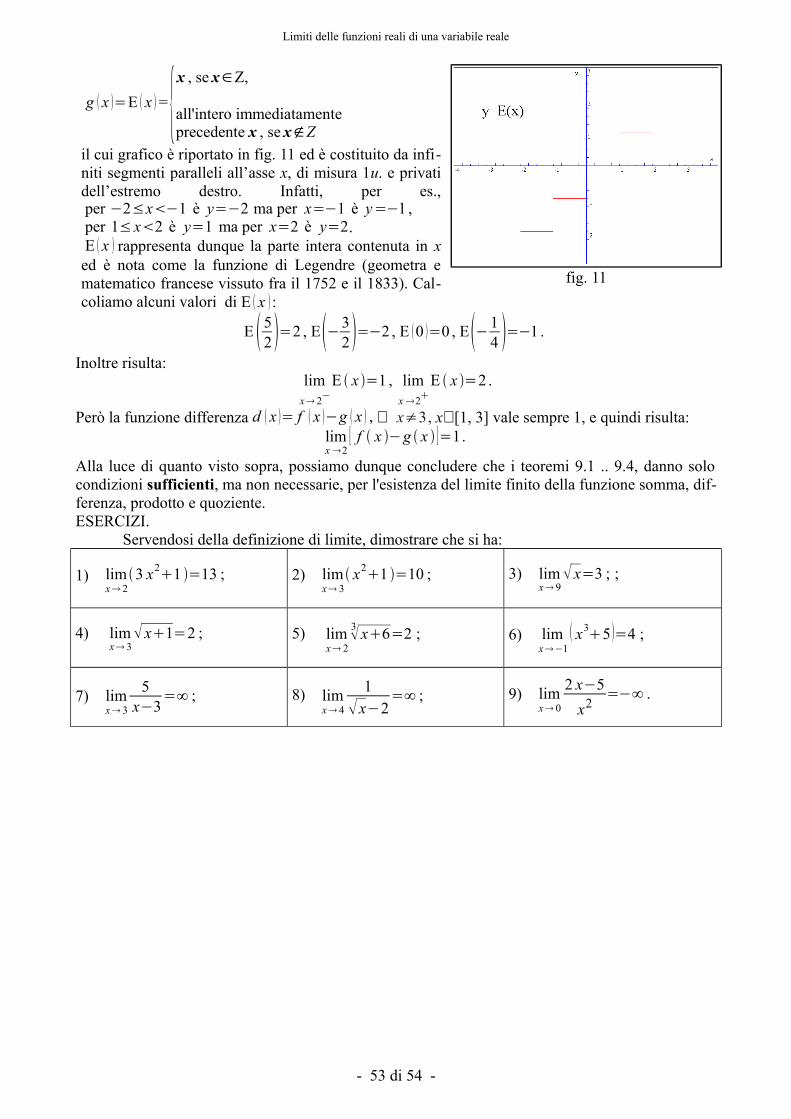
Limiti delle funzioni reali di una variabile reale
g x =E x = {x , se x ∈Z,
all'intero immediatamenteprecedente x , se x ∉Z
il cui grafico è riportato in fig. 11 ed è costituito da infi-niti segmenti paralleli all’asse x, di misura 1u. e privati dell’estremo destro. Infatti, per es., per −2≤x−1 è y=−2 ma per x=−1 è y =−1 , per 1≤ x2 è y=1 ma per x=2 è y=2.E x rappresenta dunque la parte intera contenuta in x ed è nota come la funzione di Legendre (geometra e matematico francese vissuto fra il 1752 e il 1833). Cal-coliamo alcuni valori di E x :
fig. 11
E 52 =2 , E− 3
2 =−2 , E 0 =0 , E− 14 =−1 .
Inoltre risulta:
lim
x 2−
E x =1 , limx 2
E x =2 .
Però la funzione differenza d x = f x −g x , ∀ x≠3, x∈[1, 3] vale sempre 1, e quindi risulta:limx 2
[ f x −g x ]=1.
Alla luce di quanto visto sopra, possiamo dunque concludere che i teoremi 9.1 .. 9.4, danno solo condizioni sufficienti, ma non necessarie, per l'esistenza del limite finito della funzione somma, dif-ferenza, prodotto e quoziente.ESERCIZI.
Servendosi della definizione di limite, dimostrare che si ha:
1) limx 2
3 x21 =13 ; 2) limx 3
x21 =10 ; 3) limx 9
x=3 ; ;
4) limx 3
x1=2 ; 5) limx 2
3 x6=2 ; 6) limx−1
x35 =4 ;
7) limx 3
5x−3
=∞ ; 8) limx 4
1
x−2=∞ ; 9) lim
x 0
2 x−5
x2=−∞ .
- 53 di 54 -
Indice generale
Indice generale
Indice generaleElenco dei simboli più importanti........................................................................................................1Proprietà delle potenze e alcune formule algebriche più importanti....................................................2I sistemi di equazioni di primo grado...................................................................................................3Definizione e proprietà dei radicali......................................................................................................7Formula risolutiva dell'equazione algebrica di secondo grado e fattorizzazione del trinomio di 2°...8Formule più importanti di trigonometria..............................................................................................9Formule riguardanti la retta e alcune coniche in un piano cartesiano................................................11Dimostrazione della formula della distanza punto-retta.....................................................................15Dimostrazione dell'equazione cartesiana di una retta.........................................................................17Esponenziali e logaritmi.....................................................................................................................19
1. Potenza con esponente intero di un numero reale......................................................................192. Potenza con esponente razionale...............................................................................................193. Equazioni esponenziali..............................................................................................................214. Funzioni esponenziali ...............................................................................................................225. Grafico della funzione esponenziale..........................................................................................226. Logaritmi...................................................................................................................................227. Proprietà dei logaritmi...............................................................................................................248. Passaggio da un sistema di logaritmi a un altro........................................................................249. Funzione logaritmica e relativo grafico ....................................................................................2510. Equazioni logaritmiche............................................................................................................25
Relazioni e funzioni............................................................................................................................281. Prodotto cartesiano fra insiemi..................................................................................................282. Relazioni binarie tra due insiemi...............................................................................................283. Le proprietà di una relazione R..................................................................................................294. Le funzioni.................................................................................................................................30
Funzioni invertibili.............................................................................................................................32Classificazione dei vari tipi di funzioni..............................................................................................34Limiti delle funzioni reali di una variabile reale................................................................................36
0. Introduzione...............................................................................................................................361. Limite finito per una funzione in un punto................................................................................382. Definizione di limite infinito per una funzione in un punto......................................................403. Limite destro e sinistro di una funzione.....................................................................................414. Definizione di limite per una funzione all'infinito.....................................................................435. Definizione di limite in termini di intorni..................................................................................446. Teoremi fondamentali sui limiti.................................................................................................447. Infinitesimi e loro proprietà fondamentali.................................................................................478. Operazioni con i limiti...............................................................................................................499. Dimostrazioni dei teoremi sui limiti..........................................................................................50
Indice generale....................................................................................................................................54
- 54 di 54 -
Top Related