







Languages
Pages
Legal


Aplicação da norma CEI 61850-90-1 para realização
sistémica de “low voltage ride through”
João Carlos Vinagre Batôco
Dissertação para obtenção do Grau de Mestre em
Engenharia Eletrotécnica e de Computadores
Orientador: Prof. Doutor José Luís Costa Pinto de Sá
Júri
Presidente: Prof. Doutora Maria Eduarda de Sampaio Pinto de Almeida Pedro
Orientador: Prof. Doutor José Luís Costa Pinto de Sá
Vogal: Prof. Doutor José Manuel Dias Ferreira de Jesus
Abril de 2014
i
Agradecimentos
Ao Professor Pinto de Sá pela oportunidade de desenvolver um trabalho pioneiro na sua área,
que espero possa vir a ter algum impacto e contribuir para a melhoria da gestão do sistema elétrico.
Um especial agradecimento ao Márcio, Roberto, Délcio e Nuno pela ajuda, pelos momentos
passados e trabalhos desenvolvidos em conjunto, ao longo destes últimos anos.
Aos meus colegas e amigos da residência pelos momentos de convívio, sem os quais tudo
seria mais difícil. Ao Machado, Manel, Daniel, Diogo, Carlos, Paulão e em especial ao Zé, cujo apoio
foi importante para a realização deste trabalho.
Por fim, aos meus pais, pelo esforço que sempre fizeram para que eu tivesse a melhor
educação e valores possíveis. À minha irmã, por me dar a oportunidade de ser o irmão mais velho.

ii
Resumo
Dada a expansão recente do número de instalações eólicas, a rede elétrica deparou-se com
novos problemas, relativamente à despachabilidade da produção e à instabilidade da rede. Como as
instalações eólicas não contribuíam para a estabilidade da rede criaram-se requisitos para que estas
sejam capazes de atravessar cavas de tensão, isto é, tenham capacidade de Low Voltage Ride
Through. Porém, esta não é uma característica que deva ser cumprida em todas as situações, mas
apenas para cavas resultante de defeitos na rede MAT. No caso de defeitos locais às instalações, deve
ser possível que as suas proteções atuem, protegendo a rede local e os seus equipamentos.
A resolução deste problema exige a utilização de Esquemas Especiais de Proteção, que sejam
capazes de distinguir a origem das cavas de tensão e transmitir essa informação à instalação eólica.
Para o envio da informação estuda-se o uso da norma CEI 61850-90-1, especialmente direcionada
para a comunicação entre subestações, seguindo a tendência atual de evolução dos SAS para a norma
CEI 61850.
Como esta norma é recente, as suas aplicações e casos reais de utilização são escassos.
Assim sendo, neste trabalho, avaliam-se as suas capacidades, requisitos, mecanismos e tecnologias
que sejam capazes de contribuir para uma comunicação mais fiável, rápida e determinística.
Por fim, analisam-se as melhores opções de implementação, identificando uma possível
solução para o problema, as tecnologias e métodos mais adequados, e propondo as regulações a
aplicar às proteções das redes locais das instalações eólicas.
Palavras-chave: Cavas de tensão, LVRT, GOOSE, Tunneling, Esquema Especial de Proteção

iii
Abstract
Due to the recent growth in the number of wind parks, the electric grid has encountered new
problems, mainly concerning production dispatchability and grid instability. Since wind generation didn’t
contribute to the grid stability, some requirements were created so that they are able to go through
voltage dips, i.e., to have Low Voltage Ride Through capability. However, this is not mandatory in every
case, but only in those where the dips result from faults in the transmission grid. Whenever there are
local faults, their protections must be able to work properly, protecting the local grid and its equipment.
Solving this problem requires using Special Protection Schemes, which are able to identify the
causes of the voltage dips and transmit that information to the wind park. In order to send this
information, it must be studied the usage of the IEC 61850-90-1 standard, specially directed for the
communication between substations, following the present trend of SAS’ evolution to the IEC 61850
standard.
Since this is a recent standard, its application cases are scarce. Thus, in this thesis, it is made
an evaluation of its capabilities, requirements, mechanisms and technologies that can be used to help
achieving a faster, more reliable and more deterministic communication.
Finally, an analysis will be performed on the best options of implementation, where a possible
solution to this problem will be presented, on the technologies and on the more appropriate methods,
and it will be proposed the settings to apply to the wind parks local grid’s protections.
Keywords: Voltage dips, LVRT, GOOSE, Tunneling, Special Protection Scheme

iv
Índice
Agradecimentos ................................................................................................................................... i
Resumo .............................................................................................................................................. ii
Abstract ............................................................................................................................................. iii
Lista de Figuras ................................................................................................................................ vii
Lista de Tabelas ................................................................................................................................ ix
Lista de Abreviaturas .......................................................................................................................... x
1. Introdução ...................................................................................................................................1
1.1. Enquadramento ...................................................................................................................1
1.2. Objetivos .............................................................................................................................2
1.3. Organização da Dissertação ................................................................................................3
2. O papel do Low Voltage Ride Through no setor elétrico...............................................................4
2.1. Energia Eólica .....................................................................................................................4
2.2. Introdução ao Low Voltage Ride Through ............................................................................5
2.3. Evolução das curvas de LVRT e grid codes .........................................................................8
2.4. Potenciais problemas causados por cavas de tensão ........................................................11
2.5. Ligação a redes .................................................................................................................12
3. CEI 61850 .................................................................................................................................17
3.1. A norma CEI 61850 ...........................................................................................................17
3.2. DEIs e Nós Lógicos ...........................................................................................................18
3.3. CEI 61850-90-1 .................................................................................................................20
3.4. Divisão lógica da subestação .............................................................................................21
3.5. Comunicação ....................................................................................................................23
3.6. Tipos de mensagens .........................................................................................................24
3.7. Mensagens GOOSE ..........................................................................................................27
3.8. Comunicação entre subestações .......................................................................................28
Tunneling ...................................................................................................................28
Gateway ....................................................................................................................29
4. Desempenho do Sistema de Automação de Subestações .........................................................31
4.1. Fiabilidade e disponibilidade da rede .................................................................................31
4.2. Redundância e tolerância a falhas .....................................................................................32
Rapid Spanning Tree Protocol – RSTP ......................................................................32
Parallel Redundancy Protocol – PRP .........................................................................33
High-availability Seamless Redundancy – HSR ..........................................................33
4.3. Transmissão de mensagens entre subestações .................................................................34
4.4. Mecanismos utilizados na melhoria do desempenho da rede .............................................35

v
Gestão de multicast ...................................................................................................35
Redes virtuais ............................................................................................................36
Separação do Bus de Processo e Bus de Estação .....................................................38
Priorização de tráfego (Priority Tagging).....................................................................38
Segurança do tráfego .................................................................................................39
Sincronização temporal ..............................................................................................40
5. Tecnologias de comunicação ....................................................................................................41
5.1. Identificação de tecnologias ...............................................................................................41
Power Line Communication, PLC ...............................................................................42
Digital Subscriber Loop, DSL .....................................................................................42
Fibra ótica ..................................................................................................................42
Micro-ondas ...............................................................................................................43
Satélite ......................................................................................................................43
WiMAX ......................................................................................................................43
Serviços de operadores móveis .................................................................................44
5.2. Tempo de transmissão de mensagens ...............................................................................44
Processamento do switch, LSW ...................................................................................45
Armazenamento e encaminhamento, LSF ...................................................................45
Transmissão na linha, LWL ..........................................................................................45
Filas nos switches, LQ ................................................................................................45
Influência da carga da rede ........................................................................................46
Cálculo de pior caso de latência, LTOTAL ......................................................................46
5.3. Estado da arte relativa a transmissão de mensagens GOOSE ...........................................46
Transmissão entre subestações .................................................................................47
Transmissão dentro de subestação com uso de redes virtuais ...................................47
Transmissão dentro de subestação para topologias diferentes ...................................48
Comunicações sem fios .............................................................................................50
Simulação de rede com e sem fios .............................................................................51
Uso de Internet em proteção ......................................................................................52
Avaliação do esquema de retransmissão de mensagens GOOSE ..............................53
Análise do desempenho de mensagens GOOSE em WAN com CEI 61850-90-1........53
6. Dimensionamento do Esquema Especial de Proteção ...............................................................54
6.1. Esquema Especial de Proteção .........................................................................................54
Instalações abrangidas pelo EEP ...............................................................................55
Requisitos de implementação.....................................................................................56
6.2. Requisitos temporais .........................................................................................................57
6.3. Modelação do Esquema Especial de Proteção ..................................................................58
Sequência de funcionamento do EEP ........................................................................60
6.4. Tempo de transmissão na rede ..........................................................................................61
vi
6.5. Proteções ..........................................................................................................................63
Proteção de instalações eólicas com capacidade de LVRT ........................................64
Proteção de instalações eólicas sem capacidade de LVRT ........................................66
Teleproteção ..............................................................................................................67
6.6. Implementação ..................................................................................................................68
Avaliação das tecnologias ..........................................................................................68
Opção final.................................................................................................................71
7. Conclusões ...............................................................................................................................73
7.1. Considerações finais .........................................................................................................73
7.2. Direções de investigação ...................................................................................................74
8. Referências bibliográficas..........................................................................................................76
Anexos .............................................................................................................................................80
I. Tecnologias de turbinas eólicas..................................................................................................80
a) Máquina de Indução com Rotor em Gaiola - MIRG ................................................................80
b) Máquina de Indução Duplamente Alimentada – MIDA ...........................................................80
c) Máquina Síncrona de Velocidade Variável – MSVV ...............................................................81
II. Cálculo do envio de mensagens no bus de processo.................................................................82
a) Carga da rede .......................................................................................................................82
b) Componentes de atraso ........................................................................................................82
III. Protocolos para o envio de mensagens em WAN .....................................................................84
a) VPN ......................................................................................................................................84
b) MPLS ....................................................................................................................................84
c) MPLS-TP ..............................................................................................................................85
d) PBB ......................................................................................................................................85
e) Outros protocolos em Camada 2 do modelo OSI ...................................................................86
IV. Topologias de rede ..................................................................................................................87
a) Topologia em estrela .............................................................................................................87
b) Topologia em anel simples ....................................................................................................87
c) Topologia de anéis múltiplos .................................................................................................88
d) Anel de DEIs .........................................................................................................................88
e) Topologia híbrida estrela-anel / estrela redundante ...............................................................89
V. Proteção de instalações sem capacidade de LVRT ...................................................................90
a) Proteções e Automação nas centrais eólicas ligadas à rede MT ............................................90
b) Proteções e Automação nas centrais eólicas ligadas à rede AT.............................................94

vii
Lista de Figuras
Figura 1 - Potência eólica instalada a nível mundial entre 1996 e 2013 [15] ........................................4
Figura 2 - Top dos países com maior potência eólica instalada em Dezembro de 2012 [15] ................5
Figura 3 - Exemplo de limites de tensão para a rede de transporte e possível evolução da tensão durante
um defeito (WECC) [52] ......................................................................................................................6
Figura 4 - Identificação das diferentes áreas de uma curva tensão-tempo [30] ....................................7
Figura 5 - Curva de LVRT alemã inicial de 2003 [38] ...........................................................................8
Figura 6 - Curva de LVRT dos EUA, apresentada em 2005 [38] ..........................................................9
Figura 7 - Comparação de curvas de LVRT de diversos países [38] ....................................................9
Figura 8 - Curva de LVRT portuguesa [33] ........................................................................................10
Figura 9 - Curva de fornecimento de reativa durante cavas de tensão [33] ........................................10
Figura 10 - Cava de tensão provocado por defeito na rede MAT em Mudarra e Romica [45] .............11
Figura 11 – Perda de produção eólica na rede espanhola [44] ..........................................................12
Figura 12 - Esquema de teleproteção atuado por uma proteção de distância ....................................14
Figura 13 - Rede tipo de Alta Tensão com representação de vários defeitos [38] ..............................15
Figura 14 - Estrutura hierárquica de um DEI [14] ...............................................................................18
Figura 15 - Estrutura em árvore dos dados e atributo do nó lógico XCBR (disjuntor) .........................19
Figura 16 - Representação dos níveis e buses de uma subestação utilizando a norma CEI 61850 [32]
.........................................................................................................................................................21
Figura 17 - Funcionamento de uma Merging Unit no bus de processo [46] .......................................22
Figura 18 - Interfaces lógicas entre duas subestações [23]................................................................23
Figura 19 - Mapeamento dos protocolos nas várias camadas do modelo OSI [14] .............................24
Figura 20 - Serviços de comunicação da norma CEI 61850 [22] ........................................................24
Figura 21 - Definição do tempo de transmissão de uma mensagem entre dois dispositivos físicos [23]
.........................................................................................................................................................26
Figura 22 - Esquema de retransmissão de mensagens GOOSE após a ocorrência de um evento [25]
.........................................................................................................................................................27
Figura 23 - Estrutura simplificada de comunicação ente subestações [23] .........................................28
Figura 24 - Comunicação entre subestações utilizando tunneling [23] ...............................................29
Figura 25 - Comunicação entre subestações utilizando o esquema de proxy gateway [23] ................30
Figura 26 - Diagrama de uma rede que implementa PRP [32] ...........................................................33

viii
Figura 27 - Diagrama de uma rede que implementa HSR [32] ...........................................................34
Figura 28 - Transmissão de mensagem GOOSE bloqueada pelo router [53] .....................................34
Figura 29 - Mensagem GOOSE enviada através da WAN utilizando um túnel [53] ............................35
Figura 30 - Envio de mensagens por multicast [13] ...........................................................................36
Figura 31 - Segregação de tráfego utilizando diferentes VLANs [13] .................................................37
Figura 32 - Estrutura de uma frame na VLAN [13] .............................................................................38
Figura 33 – Bus de processo e estação separados (esquerda) e comuns (direita) [3] ........................38
Figura 34 - Representação do mecanismo de priorização de tráfego [34] ..........................................39
Figura 35 - Estrutura de um pacote Ethernet [2] ................................................................................39
Figura 36 - Estrutura da área da linha de transmissão do bus de processo [55] .................................48
Figura 37 - Esquema unifilar da subestação em estudo [47] ..............................................................49
Figura 38 – Distribuição de probabilidade cumulativa de tempos de ida-e-volta para as diferentes
tecnologias [29].................................................................................................................................51
Figura 39 - Conceito do sistema de comunicação entre a subestação e o DER [26] ..........................52
Figura 40 - Topologia de testes em laboratório [36] ...........................................................................53
Figura 41 - Esquema de nós lógicos dentro de uma bay, com proteção redundante [4] .....................58
Figura 42 - Estrutura horizontal para um esquema de proteção de linha com proteção de distância [21]
.........................................................................................................................................................59
Figura 43 - Proteção de corrente diferencial de linha [21] ..................................................................60
Figura 44 - Esquemas de ligação das tecnologias de geradores à rede elétrica, (a) MIDA, (b) MSVV,
(c) MIDA [43] ....................................................................................................................................81
Figura 45 - Topologia em estrela [17] ................................................................................................87
Figura 46 - Topologia em anel simples em modo normal e modo de recuperação [5] ........................88
Figura 47 - Topologia em anéis múltiplos [34] ...................................................................................88
Figura 48 - Anel de DEIs [34] ............................................................................................................89
Figura 49 - Topologia híbrida estrela-anel, com indicação de falhas suportadas [17] .........................89
Figura 50 - Topologia base para definição de tipos de centrais ligadas na Média Tensão [38] ...........90

ix
Lista de Tabelas
Tabela 1 - Grupos Lógicos definidos em CEI 61850-7-1 [19] .............................................................19
Tabela 2 - Classe de performance para mensagens tipo 1A entre subestações [23] ..........................25
Tabela 3 - Tempo máximo de transmissão de alguns tipos de mensagens ........................................27
Tabela 4 - Resultados de tempo de ida e volta (ms) para teste entre subestações [53] .....................47
Tabela 5 – Atraso máximo e médio registado para cada VLAN no bus de estação [55] .....................47
Tabela 6 - Atraso médio e máximo para a área da linha de transmissão do bus de processo [55] .....48
Tabela 7 - Atraso ETE em várias mensagens, sem utilização de priority tagging, em ms [47] ............49
Tabela 8 - Atraso ETE em várias mensagens, com utilização de priority tagging, em ms [47] ............49
Tabela 9 - Resultados de atraso ETE para arquitetura mais económica, em ms [47] .........................50
Tabela 10 - Resultados de atraso ETE para a topologia em anel, em ms [47]....................................50
Tabela 11 - Tempo de ida e volta para pacotes na rede para as diversas tecnologias [29].................51
Tabela 12 - Atraso de tempo medido para a simulação de comunicação, com e sem fios [26] ...........52
Tabela 13 - Atraso de tempo medido para a comunicação, com e sem fios, com o uso de relés [26] .52
Tabela 14 - Resultado de teste de envio de pacotes utilizando Internet [28] ......................................53
Tabela 15 - Número de parques eólicos, divididos por níveis de potência, em 2013 [9] .....................55
Tabela 16 – Instalações eólicas que cumprem os requisitos de LVRT, por nível de tensão (Abril de
2013) ................................................................................................................................................55
Tabela 17 - Resumo do tempo máximo de transmissão para os tipos de mensagens utilizados ........57
Tabela 18 - Números típicos de curto-circuitos em linhas da rede de distribuição [8] .........................63
Tabela 19 - Regulação das proteções da rede AT, com capacidade de LVRT [38] ............................65
Tabela 20 - Regulação das proteções da rede MT, com capacidade de LVRT [38] ............................66
Tabela 21 - Características das tecnologias de comunicação identificadas ........................................70
Tabela 22 – Distinção entre instalações eólicas de “fraca potência” e “potência considerável” ...........90
Tabela 23 – Regulação de proteções para a situação “a.” da rede de Média Tensão .........................91
Tabela 24 - Regulação de proteções para a situação “b.” da rede de Média Tensão .........................91
Tabela 25 - Regulação de proteções para a situação “c.” da rede de Média Tensão..........................92
Tabela 26 - Regulação de proteções para a situação “d.” da rede de Média Tensão .........................93
Tabela 27 - Regulação das proteções para instalações da rede AT, sem capacidade de LVRT .........94
x
Lista de Abreviaturas
AT – Alta Tensão
CEI – Comissão Eletrotécnica Internacional
DEI – Dispositivos Eletrónico Inteligente
EEP – Esquema Especial de Proteção
GOOSE – Generic Object Oriented Substation Event
IEEE – Institute of Electrical and Electronics Engineers
IP – Internet Protocol
LVRT – Low Voltage Ride Through
LAN – Local Area Network
MAT – Muito Alta Tensão
MPLS – Multi-Protocol Label Switching
MT – Média Tensão
MU – Merging Unit
PBB – Provider Backbone Bridges
QoS – Quality of Service
SMV – Sampled Measured Value
VLAN – Virtual Local Area Network
VPN – Virtual Private Network
WAN – Wide Area Network
WiMAX – Worldwide Interoperability for Microwave Access

1
Capítulo 1
1. Introdução
1.1. Enquadramento
No decorrer das últimas décadas, o setor elétrico tem evoluído bastante com a introdução de
geração a partir de fontes de energia alternativas. A presença disseminada desta geração distribuída e
não despachável implicou a alteração dos fluxos de energia na rede, que até aqui eram bem definidos.
Como tal, as companhias elétricas têm vindo a modernizar as suas redes e infraestruturas, de modo a
adaptarem-se a este novo paradigma. Assim, para acompanhar esta evolução, é necessário um maior
controlo sobre o sistema, sendo fundamental monitorizar cada vez mais parâmetros e recolher medidas
mais precisas e em maior quantidade. Desta forma, é necessário que o controlo e automação dos
sistemas elétricos se estendam cada vez mais, fazendo uso de sistemas de comunicação e
monitorização fiáveis e rápidos, que são decisivos para a gestão do sistema elétrico. Tendo isto em
conta, as principais funções realizadas pelos Sistemas de Automação em Subestações (SAS), para
apoiar a gestão do sistema, são controlo, proteção e supervisão de equipamentos.
Nesse sentido, a criação de um standard global aplicado a SAS teve como objetivo a resolução
de um problema antigo relacionado com que a existência de inúmeros protocolos, muitos deles
estabelecidos pelos próprios fabricantes. Esta situação deu origem à impossibilidade de serem
utilizados equipamentos de fabricantes diferentes numa mesma instalação, sem a utilização de
conversores protocolares bastante complexos e dispendiosos. Para contornar esta situação, a criação
de uma norma universal para a comunicação em subestações começou a ser concretizada em 1994
pela CEI. Simultaneamente, o IEEE iniciou o desenvolvimento do protocolo UCA com propósito
semelhante. Em 1997, as duas instituições acordaram o desenvolvimento conjunto de uma norma
comum, que através do grupo de trabalho TC57 da CEI publicou, em 2003, a norma CEI 61850
denominada “Communication Networks and Systems in substations”. O processo de desenvolvimento,
testes e implementação da norma ocorreu com a cooperação de todas as partes interessadas, desde
fabricantes de equipamentos a operadores de rede elétrica, criando uma base uniforme para
comunicação e controlo em subestações.
Com a evolução da tecnologia, os sistemas de proteção com base em relés analógicos,
eletromecânicos e eletrónicos, foram substituídos em grande escala por equipamentos digitais. Assim,
os sistemas recentes possuem um número de funcionalidades e parâmetros configuráveis, largamente
superiores aos existentes no passado. Como tal é necessário ocorrer uma evolução também na área
das comunicações. A ligação dos componentes dispositivos baseados em microprocessadores rápidos
denominados Dispositivos Eletrónicos Inteligentes (DEIs) é realizada com recurso a uma ligação
Ethernet, configurando uma Área de Rede Local (LAN). A comunicação entre DEIs é feita com base
em mensagens rápidas GOOSE, que transportam vários tipos de informação, de modo a realizar
funções tão distintas como proteção, monitorização e processamento de informação. A utilização de
Ethernet em SAS revolucionou as comunicações tornando a instalação e configuração mais simples,
2
flexível e económica. Ao invés de um número elevado de ligações ponto a ponto, existe uma única
ligação de rede que liga todos os equipamentos do sistema.
A norma CEI 61850 está em evolução com a inclusão de novas capacidades e utilizações
possíveis. Uma das funcionalidades mais interessantes é a sua utilização para a comunicação entre
subestações, que surgiu com a CEI 61850-90-1, que possibilita alargar os benefícios da norma à
generalidade da rede elétrica. Esta aplicação implica algumas alterações, nomeadamente nos
mecanismos de comunicação utilizados, que na versão original da norma apenas permitem a sua
utilização numa rede local e não em redes de longa distância (Wide Area Networks – WAN).
Com a expansão da energia eólica nos últimos anos, a importância da produção
descentralizada no sistema elétrico aumentou drasticamente. Assim, um evento que interfira com o
funcionamento dessas instalações produtoras tem, hoje em dia, uma relevância que não tinha no
passado. Neste momento verifica-se que uma parte significativa das instalações eólicas não contribui
para a estabilidade da rede elétrica. Quando um defeito ocorre na rede de Muito Alta Tensão, MAT, é
originada uma cava de tensão que se propaga por toda a rede. No caso de as instalações não estarem
preparadas para tal, essa cava de tensão irá conduzir à sua desligação da rede o que, devido à
produção dessas instalações ser eliminada, leva ao agravamento do problema. Para contornar este
problema foram criados requisitos de Low Voltage Ride Through, LVRT, que indicam a capacidade das
instalações suportarem cavas de tensão. Com a obrigatoriedade do cumprimento dos requisitos de
LVRT por parte das instalações pretende-se que estas contribuam para a estabilidade do sistema, em
caso de incidente na rede MAT. Porém, um grande número de instalações eólicas encontra-se ligado
na rede de distribuição, entre 10 kV e 60 kV, pelo que é necessário que a informação acerca de defeitos
ocorridos na rede MAT chegue a essas instalações em tempo real, caso contrário a capacidade de
LVRT seria inútil dado o seu conflito com as parametrizações das proteções locais. A norma CEI 61850-
90-1, devido às suas características, é uma boa candidata para possibilitar o envio da informação entre
o local onde ocorreu o defeito e as instalações dotadas de LVRT.
1.2. Objetivos
O presente documento contempla uma breve descrição dos objetivos da norma CEI 61850 e
da sua extensão 90-1, que se aplica a comunicação entre subestações, sendo identificadas as suas
especificações e capacidades. Com este trabalho pretende-se avaliar a possibilidade da utilização da
norma CEI 61850-90-1 na contribuição para a gestão de uma rede elétrica, com grande penetração de
energia eólica, através da utilização de Low Voltage Ride Through nas instalações eólicas ligadas à
rede de distribuição.
Assim, é necessário fazer um estudo da aplicação da norma CEI 61850 para comunicação
dentro e entre subestações, com vista à obtenção de um esquema de proteção sistémico capaz de
assegurar a capacidade de atravessar cavas de tensão às instalações produtoras. Para tal, é
necessário avaliar os diversos requisitos de tempo de transmissão de mensagens dentro de
subestações, utilizando a CEI 61850-3, e entre subestações, utilizando a CEI 61850-90-1. Como apoio

3
faz-se um levantamento de diversos mecanismos utilizados na transmissão de mensagens entre
subestações, dado que esta comunicação não é trivial para o tipo de mensagens utilizadas. De modo
a avaliar a exequibilidade e eficácia da aplicação é necessária uma análise às diversas tecnologias
passíveis de serem utilizadas, tendo como base a sua fundamentação teórica e estudos realizados
acerca da sua utilização para a transmissão de mensagens.
Por fim, tem-se como objetivo descrever o esquema especial de proteção a implementar, propor
a regulação das proteções das redes locais, para as compatibilizar com os requisitos de LVRT, e
determinar a exequibilidade da solução proposta.
1.3. Organização da Dissertação
O Capítulo 2 faz o enquadramento da energia eólica, da sua evolução e importância na
produção de energia atualmente. Introduz-se o conceito de LVRT e explicita-se qual o seu contributo
no cenário atual, referindo a razão pela qual é necessário o uso de teleprotecção para a sua realização.
O Capítulo 3 apresenta o conceito da norma CEI 61850, o seu distanciamento do modelo
anterior de subestações e as novidades introduzidas. Introduz a parte 90-1 da norma CEI 61850
destinada à comunicação entre subestações. Além da descrição dos requisitos são identificadas os
métodos para efetuar troca de informação entre subestações.
O Capítulo 4 identifica diversos fatores que contribuem para o desempenho da rede de
comunicação, como as topologias existentes e as suas características, esquemas de redundância e
tecnologias para o envio de mensagens GOOSE em WAN. Compila ainda diversos mecanismos
utilizados na melhoria do desempenho da rede como a gestão de multicast, utilização de redes virtuais,
priorização de tráfego, entre outros.
O Capítulo 5 descreve as tecnologias de telecomunicação consideradas para a utilização na
aplicação em estudo. Define-se o cálculo do tempo de atraso na rede e são identificados os seus
componentes. Apresentam-se estudos relativos à transmissão de mensagens, utilizando as tecnologias
anteriormente descritas, para diferentes características de rede e configurações.
O Capítulo 6 identifica as propostas de solução e as particularidades da implementação do
esquema especial de proteção. Define-se o tempo de transmissão da mensagem para o esquema em
questão e os seus requisitos temporais. Apresentam-se as regulações a dar às proteções das redes
locais da instalação de produção eólica nas diversas situações existentes.

4
Capítulo 2
2. O papel do Low Voltage Ride Through no setor elétrico
2.1. Energia Eólica
Presentemente, devido aos fenómenos climáticos verificados, a sociedade está mais
consciente do impacto das suas ações em todo o ambiente global. Adicionalmente, o aumento do preço
dos combustíveis fósseis aliado ao choque petrolífero de 1973, assim como a consequências das
emissões poluentes levaram à expansão das energias renováveis a nível mundial. Desta forma, nos
últimos anos foram tomadas medidas e definidas metas a atingir com o objetivo de reduzir o impacto
das emissões poluentes no planeta. No caso de Portugal, cerca de 30% das emissões de CO2 resultam
da produção de energia elétrica [41]. Nas duas últimas décadas existiu um investimento significativo
em formas de produção de energia não poluentes a nível mundial, tentando com isso reduzir a
dependência dos combustíveis fósseis. Entre as diversas tecnologias existentes destaca-se a energia
eólica devido ao rendimento apresentado e às melhores condições globais para a sua utilização.
Acresce ainda o facto de esta tecnologia ter evoluído rapidamente relativamente às restantes, devido
sobretudo à maior aposta que ocorreu, a nível mundial, nos últimos anos.
A instalação de turbinas eólicas sofreu alguma estagnação inicial, sendo que a partir do final
da década de 1990 o seu crescimento foi bastante acentuado, como demonstrado na Figura 1. Esse
crescimento deveu-se sobretudo aos avanços registados na tecnologia das turbinas e aos regimes
fiscais que introduziram grandes benefícios para este tipo de produção. Outro contributo resultou da
liberalização do sector elétrico, com a entrada de investidores privados, o que permitiu a criação de
inúmeros parques eólicos e consequente venda da energia produzida à rede elétrica. Tal ocorreu
também em Portugal, que até 2012, esteve entre os dez países de mundo com maior potência eólica
instalada, mas que em 2013 foi substituído nessa posição pela Dinamarca, como visto na Figura 2.
Adicionalmente, a nível europeu, Portugal foi o segundo país com maior percentagem de energia eólica
gerada, face ao total produzido no ano de 2012. O valor registado foi 16,8% do total da energia
produzida ficando apenas atrás da Dinamarca [12].
Figura 1 - Potência eólica instalada a nível mundial entre 1996 e 2013 [15]

5
Figura 2 - Top dos países com maior potência eólica instalada em Dezembro de 2012 [15]
Historicamente, a produção de energia elétrica a partir de fontes intermitentes, particularmente
a energia eólica, foi sempre responsável por uma parte residual da produção total de energia de um
país. A natureza da geração eólica é intermitente, não se tratando de uma tecnologia despachável.
Deste modo, para um cenário de penetração eólica reduzida a sua utilização pode ser lidada de forma
semelhante à ocorrência de cargas esporádicas na rede. Contudo, o crescimento anual das tecnologias
renováveis é significativo, o que implica que a rede elétrica deva ser capaz de suportar as alterações
que a produção de através destas fontes implica. Apesar das grandes vantagens associadas à
exploração deste tipo de energia existem muitas dificuldades e desafios no que diz respeito à sua
introdução nos sistemas elétricos atuais. Com o crescimento contínuo dos parques eólicos, em número
e capacidade de produção, identificou-se a crescente importância da produção eólica para a
estabilidade dos sistemas de energia, trazendo possíveis problemas ao seu funcionamento [49].
Após a ocorrência de grandes “apagões” na América do Norte e Europa deu-se conta dos
problemas introduzidos na estabilidade das redes e que não foram contabilizados inicialmente.
Aquando da análise dos problemas ocorridos constatou-se a não contribuição das fontes de energia
renovável para a estabilidade das redes, em situações de perturbação. Assim, como resultado da
geração eólica em grande escala, a ligação de parques eólicos à rede elétrica e as consequências daí
resultantes devem ser investigadas cuidadosamente.
2.2. Introdução ao Low Voltage Ride Through
Após se identificar a incapacidade das instalações eólicas contribuírem para a estabilidade das
redes a que estão ligadas, a maior parte dos países com produção eólica decidiu, desde 2003, exigir
às instalações essa capacidade [38]. Os requisitos exigidos às instalações eólicas representam
alterações em toda a rede, com o objetivo de evitar que o sistema elétrico reduza a sua qualidade de
serviço devido à grande penetração da energia eólica. A contribuição das instalações eólicas para a
estabilidade da rede revela-se na capacidade das instalações atravessarem cavas de tensão, o
chamado Low Voltage Ride Through, LVRT.

6
O LVRT, que é uma característica particular do Fault Ride Through, FRT, é a capacidade de
um equipamento elétrico, neste caso uma turbina eólica, responder a uma queda significativa da tensão
da rede. Esta queda de tensão é originada pela ocorrência de um curto-circuito ou por uma mudança
súbita de carga na rede. O LVRT pode aplicar-se também a outras fontes de energia renovável, como
a solar ou cogeração. A gravidade da queda de tensão é definida pelo nível de tensão durante a queda,
que pode ser nulo, e pela sua duração. Anteriormente era permitido que as turbinas fossem desligadas
da rede sempre que a situação favorecesse a turbina eólica. Porém, com o aumento da penetração
eólica, a desconexão simultânea de um grande número de turbinas implicaria a perda de uma
percentagem significativa de geração, o que teria um impacto profundo na estabilidade da rede,
especialmente nas situações de curto-circuito e mudança de carga.
Os requisitos de LVRT são definidos pelas curvas tensão-tempo, ou curvas de LVRT, que as
instalações produtoras têm de satisfazer. Utilizando as curvas de LVRT, cada operador de rede elétrica
descreve qual deve ser o comportamento das turbinas eólicas, quando uma falha em regime transitório
ocorre, determinando os limites nos quais a instalação se deve manter ligada à rede, em função da
queda de tensão e da sua duração temporal, assim como o modo de operação em cada situação.
Apresenta-se, na Figura 3, um exemplo de um defeito trifásico e a evolução da tensão ao longo do
tempo num barramento próximo do defeito. A Figura 3 ilustra os limites da tensão para os quais deve
ser aplicado LVRT.
Figura 3 - Exemplo de limites de tensão para a rede de transporte e possível evolução da tensão durante um defeito (WECC) [52]
Adicionalmente, de uma forma simplificada, o comportamento de uma turbina eólica, durante
uma falha, pode ser descrita pela curva representada na Figura 4. A curva pode dividir-se em quatro
áreas distintas, de acordo com a tensão apresentada em cada momento [30]:

7
⟹ Área 1: Para falhas que durem até tmin e para tensão no ponto de ligação à rede igual ou
superior a Vmin a instalação eólica deve permanecer ligada à rede.
⟹ Área 2: Esta área define a recuperação da tensão de Vmin a Vrem1 no período de tmin a t1. O
maior desafio no ajuste da proteção é assegurar que esta área representa da melhor forma possível a
recuperação da tensão, dado que a maior parte dos relés apenas possuem a opção de configurar
intervalos discretos de tempo e não crescimento linear e contínuo.
⟹ Área 3: descreve a recuperação do sistema com uma tensão ainda inferior ao nominal com
o valor Vrem1 durante (t2-t1) segundos.
⟹ Área 4: A situação está normalizada com a tensão igual ou superior a Vrem2, na qual as
proteções não devem operar.
Figura 4 - Identificação das diferentes áreas de uma curva tensão-tempo [30]
As curvas de LVRT surgem da suscetibilidade apresentada pelas tecnologias de produção
eólica face a curto-circuitos na rede de transporte. Assim, estas curvas exigem aos produtores a
capacidade de os geradores contribuírem para a estabilidade da rede, mantendo o seu funcionamento
em determinadas situações. Sem a capacidade de LVRT, no caso da existência de um curto-circuito
que originasse uma cava de tensão, a instalação eólica seria desligada da rede, o que enfraqueceria
ainda mais a rede afetada, prejudicando a sua estabilidade. Esta situação pode fazer com que, devido
ao agravamento das condições da rede, mais turbinas sejam desligadas, amplificando os efeitos do
curto-circuito inicial. Desta forma, se as turbinas não possuírem os mecanismos de prevenção
necessários, até pequenas quedas de tensão em redes elétricas pouco estáveis podem causar a
desligação da rede de um número elevado de turbinas, perdendo-se a sua produção. Estas curvas são
acompanhadas de requisitos relativos à capacidade de injeção de corrente durante cavas, do controlo
de potência ativa, velocidade de retoma da injeção após a cava, redução de injeção em caso de
frequência excessiva ou contingência e funcionamento temporário com desvio relativamente à
frequência nominal.

8
2.3. Evolução das curvas de LVRT e grid codes
A utilização do LVRT é um aspeto crítico nas redes elétricas atuais devido à grande contribuição
que as fontes de energia renovável têm para a produção de energia. Deste modo, o controlo de turbinas
eólicas deve ter este aspeto em consideração. Os requisitos de LVRT incluem ainda o restabelecimento
rápido de potência ativa e reativa para os valores pré-defeito, após a tensão do sistema voltar a níveis
de operação normais. Alguns grid codes impõem um aumento da produção de potência reativa durante
a perturbação de modo a apoiar a rede.
A primeira curva alemã datada de 2003 [38], apenas exigia o requisito de LVRT a instalações
eólicas ligadas à rede de transporte. A curva encontra-se representada na Figura 5, onde se verifica
que a tensão mínima da cava a suportar são 15% do valor nominal, com uma duração até 0,70
segundos. A obrigatoriedade de manter o funcionamento da instalação só se verificava para tensões
superiores à linha azul, sendo que para a região entre as duas linhas se admitia que era possível que
a instalação se desligasse brevemente. Além da curva, foram ainda definidos requisitos relativos à
potência ativa e à corrente que a instalação deveria cumprir durante a cava. Assim, o acréscimo de
potência ativa deveria ser entre 0,05 e 0,20 pu/s, dependendo da tensão da cava e a corrente deveria
aumentar de forma diretamente proporcional à profundidade da cava.
Figura 5 - Curva de LVRT alemã inicial de 2003 [38]
Em 2005, a Federal Energy Regulatory Commission, FERC, publicou para os Estados Unidos
da América a curva representada na Figura 6. A curva aplica-se para instalações com potência igual
ou superior a 20 MW. Esta curva é semelhante à alemã pois é baseada nesta, não permitindo contudo
a zona de desligação de curta duração. Encontram-se porém omissas as exigências quanto às
contribuições de potência ativa e reativa que a instalação deve fornecer à rede.

9
Figura 6 - Curva de LVRT dos EUA, apresentada em 2005 [38]
Desde a publicação destas curvas, e tomando-as como referência, tem existido grande
investigação tecnológica no sentido de dotar a geração eólica da capacidade de LVRT.
Simultaneamente, as curvas têm evoluído tornando-se mais realistas e impondo maiores requisitos de
controlabilidade. A integração das curvas de LVRT e dos requisitos de controlabilidade impostos às
instalações eólicas tem sido refletida através da integração destas condições nos regulamentos de rede
de diversos países.
A Figura 7 apresenta um conjunto de curvas de LVRT relativas a diferentes países. A definição
das curvas difere de país para país, dependendo da filosofia de proteções adotada e das características
intrínsecas da rede. Relativamente às curvas apresentadas anteriormente verifica-se que a curva dos
EUA se mantém, apesar das propostas existentes para a utilização de uma curva mais próxima da
alemã, que se encontra aqui descrita e que sofreu modificações desde a sua apresentação em 2003.
Figura 7 - Comparação de curvas de LVRT de diversos países [38]
Em Portugal, o LVRT exigido atualmente às instalações eólicas, define-se como sendo a
capacidade de um sistema eólico se manter em operação durante cavas de tensão resultantes de
defeito na rede, não se devendo desligar se o valor eficaz da tensão aos seus terminais se manter
acima da curva definida, durante os tempos de eliminação de defeito definidos. Para parques eólicos
ligados diretamente à rede de transporte poderá não haver necessidade de alteração das proteções
existentes, sendo suficiente alguma dessensibilização e uma maior temporização.

10
A Figura 8, relativa à curva de LVRT, representa os valores mínimos de tensão ao longo do
tempo, a partir do momento em que ocorre um defeito até à sua eliminação, acima do qual as
instalações de produção eólica, com potência instalada superior a 6 MVA, são obrigadas a manter-se
ligado à rede. O LVRT é válido para qualquer curto-circuito seja monofásico, bifásico ou trifásico, desde
que este ocorra fora da linha de interligação do parque eólico com a rede elétrica [33].
Figura 8 - Curva de LVRT portuguesa [33]
As instalações eólicas devem fornecer corrente reativa durante cavas de tensão, de acordo
com a Figura 9, proporcionando desta forma suporte para a tensão na rede. Ambas as curvas foram
adaptadas das curvas espanholas já existentes, apresentando pequenas alterações. Ao contrário do
ocorrido em outros países, não foram indicadas curvas distintas entre as instalações ligadas à rede de
distribuição e as com ligação à rede de transporte [33]. No caso português não é exigido controlo
automático de potência reativa, de tensão ou qualquer outro controlo em função do desvio de
frequência.
Figura 9 - Curva de fornecimento de reativa durante cavas de tensão [33]
A norma CEI 61400-21, publicada em 2008, normaliza internacionalmente os requisitos que as
turbinas eólicas devem satisfazer para poderem contribuir para a estabilidade das redes tendo uma
curva de LVRT implícita. Presentemente, os requisitos desta norma estão de acordo com as curvas
definidas pela maioria dos países, mas não para Portugal, Espanha ou os EUA [38].
11
2.4. Potenciais problemas causados por cavas de tensão
Atualmente, no caso português, verifica-se que existe ainda um grande número de instalações
eólicas que não possuem capacidade de implementar as mais recentes curvas de LVRT, dado este
apenas ser um requisito obrigatório a partir de 2010. Como a tecnologia de geração e controlo utilizada
nestes casos se encontra desatualizada, a utilização do esquema de teleproteção considerado não
introduz qualquer benefício.
O tipo de geradores utilizados influencia o comportamento face a cavas de tensão. Por
exemplo, para geradores duplamente alimentados verifica-se a sua desligação não coordenada com
quedas bruscas de tensão superiores a 10%. No caso de geradores assíncronos é possível que estes
se mantenham ligados, porém com um grande consumo de energia reativa durante a cava. Se existir
uma grande concentração destes geradores na rede, a sua presença não permite a recuperação da
tensão na sua zona de influência, após o desaparecimento do defeito, pelo que os geradores irão ser
desligados por sobrevelocidade ou pela proteção de mínimo de tensão temporizada. Em anexo
apresenta-se com maior pormenor o funcionamento dos geradores utilizados em turbinas eólicas.
No caso espanhol, dos cerca de 23.000 MW eólicos instalados em Espanha no final de 2013
verifica-se que cerca de 6.000 MW não conseguem suportar cavas de tensão inferiores a 85% da sua
tensão nominal em duração inferior a 100 ms [45]. Tal acontece pois apenas a partir de 2008 é
obrigatório cumprir exigências de LVRT.
Para uma rede com as características das redes peninsulares, há a possibilidade de perdas
massivas de geração, não suportáveis pelo sistema elétrico, decorrentes de defeitos bifásicos ou
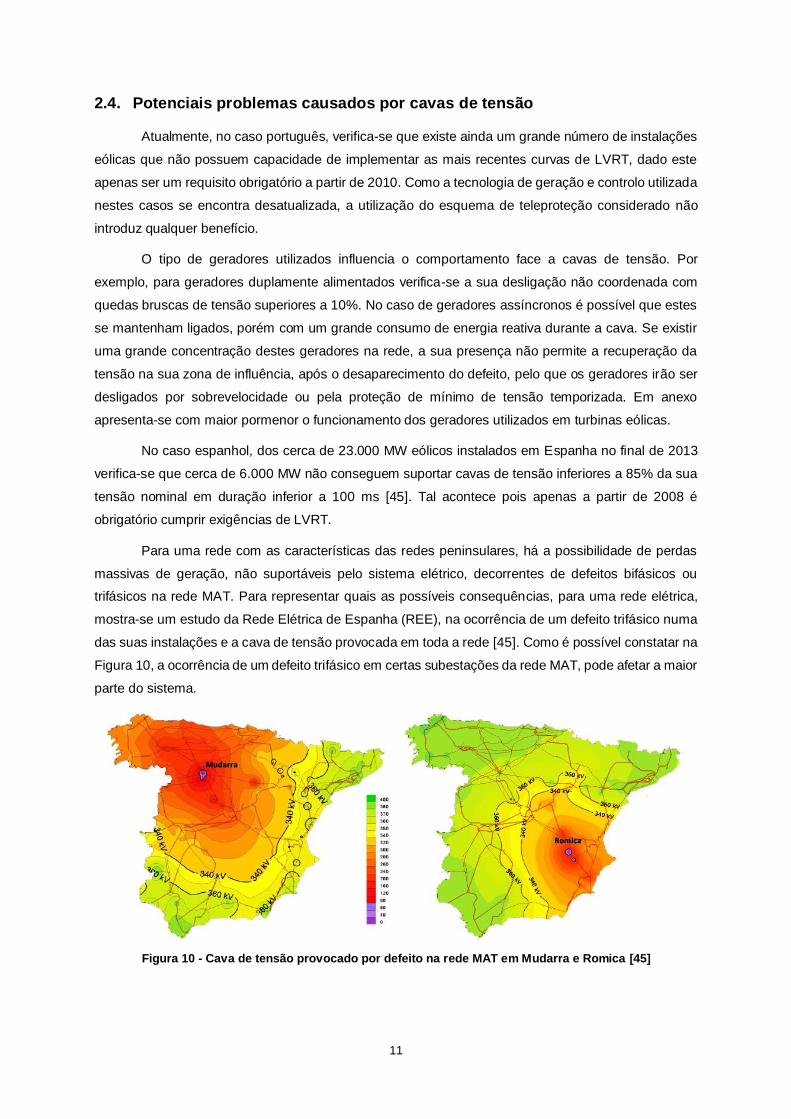
trifásicos na rede MAT. Para representar quais as possíveis consequências, para uma rede elétrica,
mostra-se um estudo da Rede Elétrica de Espanha (REE), na ocorrência de um defeito trifásico numa
das suas instalações e a cava de tensão provocada em toda a rede [45]. Como é possível constatar na
Figura 10, a ocorrência de um defeito trifásico em certas subestações da rede MAT, pode afetar a maior
parte do sistema.
Figura 10 - Cava de tensão provocado por defeito na rede MAT em Mudarra e Romica [45]

12
Além da cava de tensão propagada por toda a rede, verifica-se que um defeito trifásico nas
subestações de Mudarra e Romica provocariam uma perda de geração eólica de 1.514 MW e 1.595
MW, respetivamente. Estes valores são apenas as perdas de geração na rede espanhola, sendo
espectável que a rede portuguesa também fosse fortemente afetada, pelo menos no caso do defeito
na subestação de Mudarra, que se encontra próxima da fronteira portuguesa e das múltiplas
interligações existentes no Douro Internacional.
Para ser de mais fácil compreensão a real influência de um defeito na MAT, apresenta-se na
Figura 11 a evolução da potência eólica existente na rede espanhola no dia 04 de Outubro de 2006,
onde a ocorrência de um defeito originou a perda quase instantânea de 2.800 MW e uma queda da
frequência da rede para 48,95 Hz [45].
Figura 11 – Perda de produção eólica na rede espanhola [44]
2.5. Ligação a redes
As redes de distribuição, com estrutura radial, projetaram-se para conduzir a energia fornecida
através da rede de transporte até aos consumidores finais num sentido unidirecional. Com a introdução
da geração distribuída, a potência passou a ser injetada em diversos pontos da rede de distribuição, o
que pode afetar os trânsitos de potência. Esta situação pode gerar uma possível fonte de sobretensões
e uma redistribuição das cargas e das correntes de defeito.
Quando uma nova fonte de produção é instalada na rede de distribuição deve ter-se em conta
se a rede existente consegue garantir o escoamento da produção com segurança. Para tal, a
capacidade de transporte das linhas não deve ser excedida, assim como a potência de corte dos
disjuntores. Um parâmetro que deve ser conhecido para avaliar a capacidade de receção da rede é a
sua relação de curto-circuito, Lcc, definida como o quociente entre a potência de curto-circuito mínima
da rede, Scc, estando o produtor desligado, e a potência aparente nominal, Spd. Deve ainda avaliar-se
a variação da tensão devida à ligação e desligação da instalação de produção distribuída, que é
inversamente proporcional à relação de curto-circuito [37]. Deste modo, para que a variação da tensão

13
no ponto de ligação à rede seja nula, o produtor deveria consumir potência reativa. Porém, dado que
os consumidores consomem potência reativa, interessa ao operador da rede que o produtor forneça
potência reativa, a fim de reduzir as perdas. Por outro lado, do ponto de vista do produtor interessa
maximizar a potência ativa produzida, pois é por esta que são remunerados.
Para ser possível aos parques eólicos satisfazerem as exigências do LVRT, não basta que
estes tenham capacidade de o realizar, mas é também necessário que as proteções da sua interligação
com a rede estejam dimensionadas para o permitir. Obviamente que em caso de um curto-circuito na
linha de ligação do parque eólico à rede, a instalação deve ser desligada, permitindo o uso do
mecanismo de religação automática, e após a recuperação do defeito continuar a sua operação normal.
Assim, o interesse em manter as instalações eólicas em produção durante a ocorrência de cavas de
tensão, resultantes de curto-circuitos na rede de transporte, não é compatível com a prática de basear
a proteção contra defeitos nas redes locais em relés de subtensão com uma regulação muito sensível.
Na maior parte dos países, as centrais relevantes para a estabilidade da rede encontram-se
ligadas à rede de transporte. Esta rede é de estrutura em malha e possui proteções rápidas. Porém, tal
não é válido para todos os países com uma grande capacidade eólica instalada, como o caso de
Portugal. A capacidade de LVRT é exigida de acordo com a relevância das centrais que é definida pela
potência agregada dos parques, sendo valores típicos 5, 10 ou 25 MW [38].
Para as redes de distribuição, a exigência da capacidade de LVRT tem de vir acompanhada da
revisão das filosofias de proteção, por forma a compatibilizar esse requisito com as necessidades de
proteção das redes locais. No caso de tal não acontecer, a instalação de tecnologias de geração com
capacidade de LVRT será inútil, não tendo qualquer consequência prática para a rede. Por outro lado,
no caso de as proteções serem alteradas apenas de modo a acomodar essa capacidade de LVRT
corre-se o risco de as redes locais das instalações eólicas ficarem desprovidas de proteção. O problema
central deste trabalho está assim identificado pois é evidente que os requisitos sistémicos de LVRT e
a proteção das redes locais das centrais não são compatíveis entre si, sem a utilização de mecanismos
auxiliares. Assim, a resolução deste problema implica o uso de informação adicional relativa às
características do defeito de modo a que as proteções atuem de acordo com as necessidades do
sistema elétrico. A informação necessária apenas pode ser obtida recorrendo à utilização de
telecomunicações rápidas.
A distinção entre incidentes locais e os originados na rede de transporte é determinada por
esquemas especiais de proteção. Quando é detetado um defeito na rede de transporte, a teleproteção
deve transmitir um sinal através da rede até às instalações eólicas presentes na rede, como
demonstrado na Figura 12. Na Figura 12, a vermelho, representa-se o que é necessário adicionar ao
esquema de proteção para o compatibilizar com a transferência de disparo e os requisitos de LVRT.
Assim, ao ser detetado um defeito, além de este ser eliminado pelas proteções da rede MAT, o sinal
de teleproteção envia a informação de bloqueio para as proteções locais da rede eólica. O esquema
especial de proteção é caracterizado pelo envio deste sinal, que permite que a capacidade de LVRT
instalada seja utilizada. O uso deste esquema tem ainda como objetivo a manutenção da qualidade da
energia, cumprindo os regulamentos existentes.

14
O esquema especial de proteção requer a comunicação rápida entre os equipamentos no
interior da subestação e entre as instalações. Nesse sentido é de notar a adequação da norma CEI
61850 e das suas mensagens GOOSE.
Figura 12 - Esquema de teleproteção atuado por uma proteção de distância
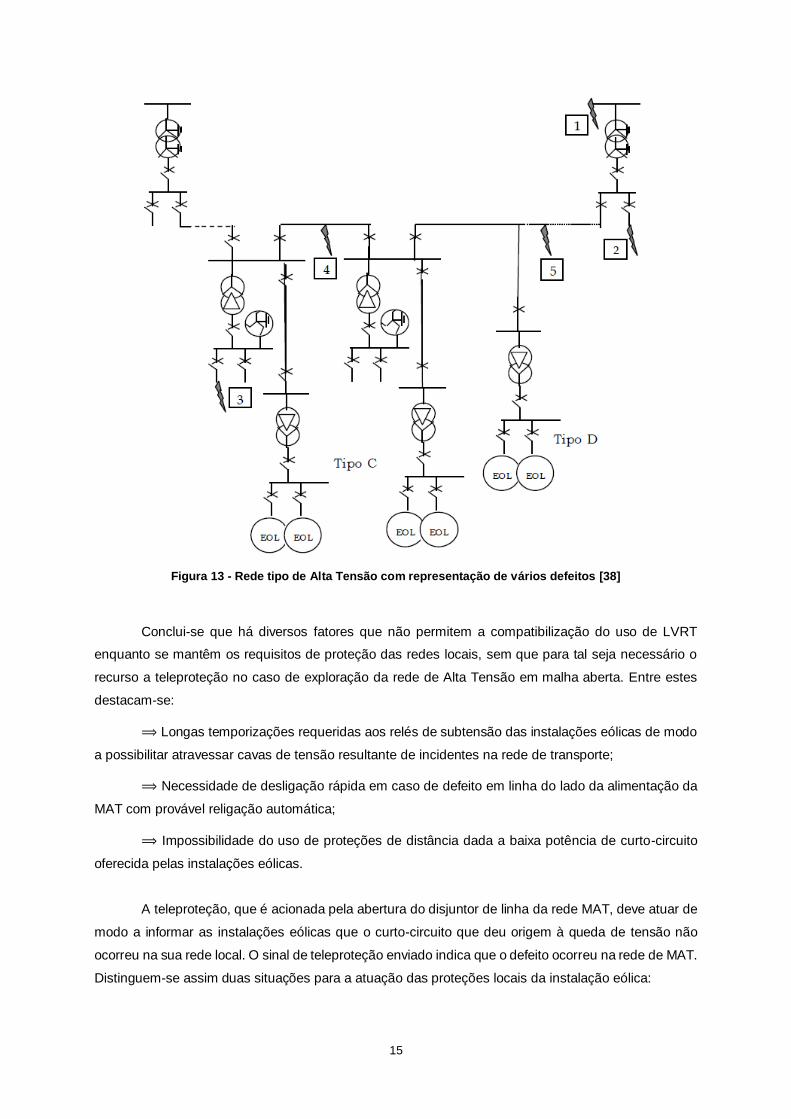
De modo a analisar as diversas possibilidades que podem ocorrer ilustra-se, na Figura 13, uma
rede tipo com diversos curto-circuitos representados e descrevem-se os procedimentos seguidos [38].
1 – Este defeito ocorre na rede de MAT. Representa um curto-circuito trifásico simétrico e que
pode resultar:
a) Eliminação do barramento de alimentação do transformar MAT/AT, por exemplo por falha
de disjuntor, que resulta em insularização de toda a rede de Alta Tensão, AT. Esta situação
causa uma falha prolongada pelo que todas as centrais da rede de AT devem ser
desligadas porém tem uma probabilidade de ocorrência muito baixa.
b) A desligação da linha onde o curto-circuito ocorreu pela proteção de distância da
subestação, com atuação eventual do 2º escalão da proteção no extremo afastado da linha.
Neste caso as proteções da rede de AT não devem ser atuadas de modo a não inviabilizar
a capacidade de LVRT das instalações eólicas a ela ligadas.
2 – Um curto-circuito deste tipo não deve causar atuação de qualquer proteção da rede, pois
ocorre numa rede à parte ligada no mesmo barramento injetor.
3 – Este curto-circuito não deve ativar as proteções da rede.
4 – O curto-circuito ilustrado provoca um defeito que deve ser eliminado pela proteção do lado
da linha alimentado pela subestação com ligação à MAT. Após a atuação da proteção as centrais à
direita do defeito têm a sua situação normalizada. Por outro lado, o defeito subsiste para a central à
esquerda do defeito. Assim, essa central deve ser desligada de modo ao mecanismo de religação
automática ser posto em ação.
5 – Este caso é semelhante ao anterior, sendo que todas as centrais devem ser desligadas
para permitir a utilização da religação automática da linha.
15
Figura 13 - Rede tipo de Alta Tensão com representação de vários defeitos [38]
Conclui-se que há diversos fatores que não permitem a compatibilização do uso de LVRT
enquanto se mantêm os requisitos de proteção das redes locais, sem que para tal seja necessário o
recurso a teleproteção no caso de exploração da rede de Alta Tensão em malha aberta. Entre estes
destacam-se:
⟹ Longas temporizações requeridas aos relés de subtensão das instalações eólicas de modo
a possibilitar atravessar cavas de tensão resultante de incidentes na rede de transporte;
⟹ Necessidade de desligação rápida em caso de defeito em linha do lado da alimentação da
MAT com provável religação automática;
⟹ Impossibilidade do uso de proteções de distância dada a baixa potência de curto-circuito
oferecida pelas instalações eólicas.
A teleproteção, que é acionada pela abertura do disjuntor de linha da rede MAT, deve atuar de
modo a informar as instalações eólicas que o curto-circuito que deu origem à queda de tensão não
ocorreu na sua rede local. O sinal de teleproteção enviado indica que o defeito ocorreu na rede de MAT.
Distinguem-se assim duas situações para a atuação das proteções locais da instalação eólica:

16
1 – Proteções atuam se for detetada uma cava de tensão e não for recebido qualquer sinal de
teleproteção. Isto indica que se trata de um defeito local.
2 – Proteções não atuam se for detetada uma cava de tensão e for recebido sinal de
teleproteção. Tal indica que o defeito ocorreu na MAT e é necessária a capacidade de LVRT.
A temporização das proteções locais deve ser tal que seja possível a transmissão do sinal de
teleproteção antes da sua atuação. Existe, no entanto, um importante problema na aplicação do
esquema especial de proteção ao problema em análise. Por exemplo, para o caso da rede da Figura
13 verifica-se que a emissão de um sinal de teleproteção é de aplicação direta para a subestação
imediatamente a jusante. Porém, se o defeito ocorrer na linha que liga o barramento injetor da MAT à
subestação da direita, a teleproteção não abrangerá as subestações da esquerda. Para tal é necessário
implementar um sistema que repita a teleproteção. Para tal irá ser considerado o uso da norma CEI
61850-90-1.

17
Capítulo 3
3. CEI 61850
O sucesso de um Sistema de Automação de Subestação (SAS) baseia-se no uso eficiente do
sistema de comunicação que liga os diversos elementos de proteção, controlo e monitorização da
subestação. Deste modo, o maior desafio existente na conceção de uma subestação será a
interoperabilidade entre os vários equipamentos que a compõem e que podem ser originários de
fabricantes distintos.
3.1. A norma CEI 61850
A norma CEI 61850 define um standard de comunicações entre todos os equipamentos que
compõem uma subestação. As capacidades da CEI 61850 excedem claramente as do standard anterior
(CEI 60870-5-103), DNP3 e dos protocolos proprietários das diversas empresas. Presentemente,
devido aos benefícios que proporciona, a CEI 61850 está encaminhada para se tornar a base de uma
rede de comunicações globalmente estandardizada.
Os maiores benefícios da norma CEI 61850 são [18]:
⟹ Interoperabilidade: os equipamentos de diversos fabricantes funcionam em conjunto
podendo trocar informações através de meios de comunicação comuns. Deste modo não ocorrem
problemas de interface e de integração de equipamentos. Contudo, as funcionalidades dos
equipamentos podem ser distintas, o que não conduz a permutabilidade entre fabricantes.
⟹ Estabilidade a longo prazo: apesar das rápidas mudanças de tecnologia, os investimentos
realizados são assegurados. A norma encontra-se desenhada para seguir a evolução das tecnologias
de comunicação assim como dos requisitos dos sistemas. Os modelos de dados e serviços de
comunicação são distanciados de tecnologias específicas.
⟹ Arquitetura simples: a estrutura da instalação é simplificada reduzindo o número de ligações
ponto a ponto para comunicação série simples. Esta filosofia apresenta maior fiabilidade pois é usado
apenas um canal de comunicação para toda a informação. Adicionalmente, a estrutura hierárquica
permite uma melhor performance das comunicações permitindo transmissões críticas no tempo.
⟹ Redução de custos: a substituição da cablagem usual de cobre por comunicações digitais
assim como a estrutura simples da subestação reduz o custo com equipamentos, construção,
configuração e manutenção.
⟹ Liberdade de configuração: pode utilizar-se um diferente número de funções de proteção e
controlo tanto de forma centralizada, várias funções num dispositivo, como descentralizada, uma
função distribuída por vários dispositivos que comunicam entre si.
A introdução da norma CEI 61850 possibilita o desenvolvimento de novas aplicações no âmbito
dos SAS como as relativas a: proteção, controlo ou supervisão de sistemas elétricos. Para tal, a

18
comunicação utilizada pela norma é horizontal, utilizando-se dispositivos digitais, que trocam
informações entre si, garantindo a funcionalidade específica de cada um, que pode depender de
informações provenientes de outros dispositivos.
A interoperabilidade entre equipamentos é conseguida através da definição do protocolo de
comunicação, formatos de dados, funções e linguagem de configuração. Uma das grandes
contribuições desta norma deve-se ainda à introdução da Substation Configuration description
Language, SCL. O grande objetivo da utilização desta linguagem é garantir a interoperabilidade entre
as ferramentas de engenharia de diferentes fabricantes, permitindo uma configuração da subestação
com independência dos DEIs. A linguagem utiliza-se para descrever o esquema unifilar da subestação,
a rede de comunicações, os nós lógicos e a sua associação aos DEIs.
3.2. DEIs e Nós Lógicos
Um Dispositivo Eletrónico Inteligente, DEI, representa uma unidade física multifuncional de uma
subestação, que possui todo o tipo de funções como controlo, proteção ou monitorização. Este é um
dos principais conceitos da norma CEI 61850, indicando que as diversas funções necessárias ao
funcionamento de uma subestação devem estar alocadas num DEI específico ou distribuídas pelos
diversos DEIs que a compõem. Os dados são tratados de forma digital, sendo transmitidos de forma
simples entre DEIs, usando comunicação série, o que reduz bastante a quantidade de ligações físicas
existentes na subestação.
Um dispositivo físico, Physical Device, representa um DEI, e é responsável pela sua ligação à
rede de comunicações. Este encontra-se dividido em dispositivos lógicos, Logical Devices, que por sua
vez se subdividem em nós lógicos, Logical Nodes. Todas estas estruturas são responsáveis por
armazenar, manipular e implementar as funcionalidades de um DEI. A hierarquia funcional de um DEI
representa-se na Figura 14, sendo que esta estrutura é flexível, até um certo ponto, podendo existir
diferenças entre equipamentos ou fabricantes.
Figura 14 - Estrutura hierárquica de um DEI [14]
19
Os nós lógicos são os elementos base de um DEI e representam de forma abstrata uma função
de sistema. Estes elementos agregam e organizam toda a informação necessária para cumprir uma
dada funcionalidade. Além dos nós lógicos definidos pela norma podem ser criados outros, desde que
de acordo com as regras estabelecidas. Cada nó lógico é uma coleção de classes de dados
normalizados. Os valores possíveis que podem ser atribuídos às classes de dados são chamados de
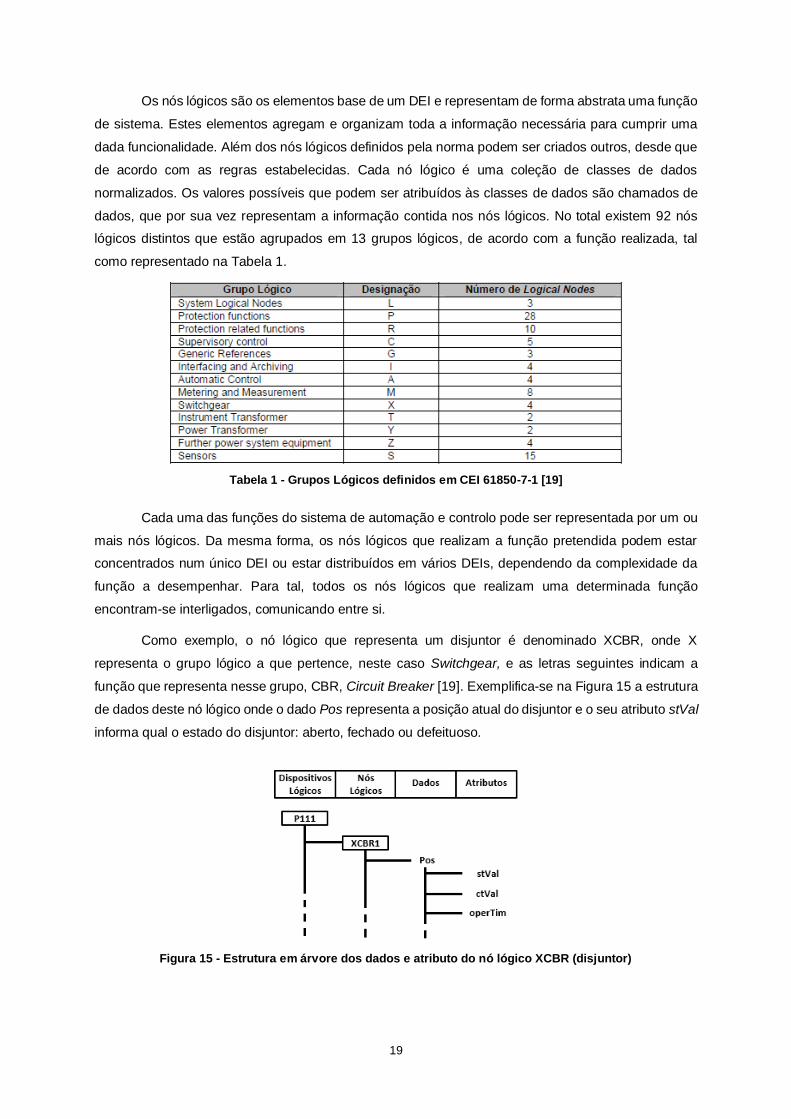
dados, que por sua vez representam a informação contida nos nós lógicos. No total existem 92 nós
lógicos distintos que estão agrupados em 13 grupos lógicos, de acordo com a função realizada, tal
como representado na Tabela 1.
Tabela 1 - Grupos Lógicos definidos em CEI 61850-7-1 [19]
Cada uma das funções do sistema de automação e controlo pode ser representada por um ou
mais nós lógicos. Da mesma forma, os nós lógicos que realizam a função pretendida podem estar
concentrados num único DEI ou estar distribuídos em vários DEIs, dependendo da complexidade da
função a desempenhar. Para tal, todos os nós lógicos que realizam uma determinada função
encontram-se interligados, comunicando entre si.
Como exemplo, o nó lógico que representa um disjuntor é denominado XCBR, onde X
representa o grupo lógico a que pertence, neste caso Switchgear, e as letras seguintes indicam a
função que representa nesse grupo, CBR, Circuit Breaker [19]. Exemplifica-se na Figura 15 a estrutura
de dados deste nó lógico onde o dado Pos representa a posição atual do disjuntor e o seu atributo stVal
informa qual o estado do disjuntor: aberto, fechado ou defeituoso.
Figura 15 - Estrutura em árvore dos dados e atributo do nó lógico XCBR (disjuntor)

20
3.3. CEI 61850-90-1
O objetivo inicial da norma CEI 61850 estava limitado à comunicação local, dentro de
subestações. Porém, à medida que a norma foi sendo implementada identificou-se como benéfica a
existência de funções que utilizassem informações provenientes de outras subestações. Um operador
de rede elétrica opera um número extenso de linhas e estruturas de interligação, como centrais elétricas
e subestações. Dado essas estruturas se encontrarem espalhadas numa grande área geográfica é
necessário haver mecanismos de comunicação entre si. Assim, há a necessidade de estarem
interligadas e coordenadas entre si, de modo a ser possível a troca de informação múltiplas finalidades.
A existência e correto funcionamento desta rede de comunicações permite uma rede elétrica estável,
segura e fiável.
Para estender os conceitos da norma à comunicação entre subestações foi criado o relatório
IEC/TR 61850-90-1 denominado “Communication networks and systems for power utility automation –
Part 90-1: Use of IEC 61850 for the communication between substations” [23]. O sistema de automação
e proteção pode assim tratar-se como um todo, não havendo uma distinção específica entre
comunicação local ou com subestações remotas. Nesta extensão definem-se os aspetos necessários
à troca de informação entre subestações, utilizando os conceitos base da norma CEI 61850. A parte
90-1 da norma contém pontos adicionais como a definição de “use cases”, que identificam situações
típicas onde a troca de informação entre subestações é necessária, estabelece os requisitos de
comunicação e descreve melhorias da linguagem de configuração SCL.
As comunicações utilizadas servem diversas aplicações e por esse motivo necessitam de
cumprir diferentes requisitos. Para o caso de mensagens de teleproteção, o atraso na transmissão
entre o emissor e o recetor é crítico. Desta forma, é necessário utilizar tecnologias adequadas que não
limitem o tempo de transmissão das mensagens, nem permitam a perda dos dados enviados, o que
resultaria em mau funcionamento e possíveis danos na rede e nos equipamentos a esta ligados.
Os comandos de teleproteção para esquemas de proteção de distância são transmitidos por
dispositivos de disparo remoto ou equipamentos de transmissão de sinais de proteção, também
conhecidos como equipamentos de teleproteção através de ligação ponto-a-ponto. Os sistemas de
teleproteção dedicados monitorizam o estado do sistema de comunicações constantemente, por
exemplo através da troca de mensagens periodicamente. Para transmissão destas mensagens de
forma segura a longas distâncias recorre-se a uma Wide Area Network, WAN.
A norma descreve diversos “use cases” que têm uma aplicação que se adequa ao problema
em estudo [23], como:
⟹ Proteção de linha de distância com esquema de teleproteção de sobrealcance permissivo;
⟹ Proteção de linha de distância com esquema de teleproteção por bloqueio;
⟹ Interlocking;
⟹ Transferência de disparo / Disparo direto;
⟹ Proteção de linha por corrente diferencial.

21
3.4. Divisão lógica da subestação
O conceito de subestação digital é baseado no uso de DEIs e outros dispositivos de rede como
switches, que partilham informação digital e realizam todas as funções com recurso a uma rede
Ethernet. Uma subestação tem os seus dispositivos divididos em três níveis, com funcionalidades
distintas entre si. Estes são o nível de processo, de bay e de estação. A comunicação dentro da
subestação é feita em dois buses distintos, o de estação e o de processo. Uma das grandes novidades
introduzidas pela CEI 61850 é a utilização de comunicações digitais no bus de processo, onde antes
eram utilizadas ligações de cobre ponto a ponto [18]. A alocação de funções em dispositivos e o fluxo
de informação são totalmente configuráveis e independentes da rede física.
⟹ Nível de processo: este nível inclui equipamentos como disjuntores, sensores, Merging Units
e transformadores de medida.
⟹ Nível de bay: inclui DEIs de medição, proteção, supervisão e controlo de várias bays, tais
como os relés de proteção, medidores de energia e oscilógrafos.
⟹ Nível de estação: neste nível encontram-se os computadores da subestação, a interface
homem-máquina e interfaces de comunicação com o centro de controlo remoto. As funções que
requerem dados de mais de uma bay são implementadas neste nível.
⟹ Bus de processo: facilita as comunicações em tempo crítico entre DEIs de proteção e
controlo com o equipamento primário da subestação transportando mensagens como valores
amostrados, sinais de estado binário ou sinais binários de controlo.
⟹ Bus de estação: possibilita a comunicação entre o nível de estação e o nível de bay
permitindo as comunicações entre diferentes bays. Aplicações de proteção e controlo críticas no tempo
no nível de estação, tais como falha de disjuntor, utilizam este bus na sua comunicação.
A divisão de funções e equipamentos numa subestação encontra-se representada na Figura
16.
Figura 16 - Representação dos níveis e buses de uma subestação utilizando a norma CEI 61850 [32]

22
O elemento fundamental do bus de processo, de acordo com a norma CEI 61850, é a Merging
Unit, MU, que recolhe os dados analógicos dos transformadores de medida e os converte para dados
digitais chamados de Sampled Measured Values, SMV, como possível identificar na
Figura 17. O pacote de dados gerado é então enviado para o DEI correspondente no nível de bay.
Adicionalmente é necessária sincronização temporal para que os fasores resultantes da informação
dos transformadores de medida sejam calculados com precisão.
Figura 17 - Funcionamento de uma Merging Unit no bus de processo [46]
Uma Merging Unit gera 80 ou 256 amostras por ciclo, o que para uma frequência de
funcionamento de 50 Hz representa 4000 ou 12800 amostras por segundo. Uma amostra é um conjunto
de oito valores analógicos, quatro tensões e quatro correntes. Deste modo, apenas uma MU utiliza
cerca de 5,44 Mbps de largura de banda [56]. Como tal, conclui-se que a largura de banda do bus de
processo tem de ser muito elevada e apresentar um grande desempenho para ser possível utilizar
dezenas destes equipamentos, sem problemas de comunicação.
A comunicação entre subestações pode-se referir a funções em SAS que são distribuídas entre
duas subestações ou referir-se a funções onde uma subestação necessita de receber informações de
outra. Um exemplo é a proteção de linha ou qualquer outro tipo de automação que envolva mais do
que uma subestação. A comunicação entre subestações é feita entre o nível de bay das duas
subestações tal como demonstrado na Figura 18.
As diferentes interfaces da Figura 18 são descritas da seguinte forma [23]:
⟹ A comunicação interna de uma subestação encontra-se representada pelas interfaces, 1, 3,
4, 5, 6, 8, e 9. Assim, as interfaces 2,7,10 e 11 representam comunicação entre a subestação e um
local remoto.
⟹ As interfaces 3,8 e 9 representam a trocas de dados dentro do nível de bay, dentro do nível
de estação e entre bays, respetivamente.
⟹ A comunicação entre diferentes níveis da subestação encontra-se representada pelas
interfaces 1,4,5 e 6. As interfaces 1 e 6 comunicam entre os níveis de bay e de estação através de
mensagens de controlo e proteção. Por sua vez, as interfaces 4 e 5 trocam dados entre o nível de
processo e de bay. A informação trocada diz respeito ao transporte de amostras de transformadores

23
de medida do nível de processo para o nível de bay. Na direção contrária são enviados sinais de
abertura de disjuntores.
⟹ As interfaces 7 e 10 são relativas à troca de dados de controlo e monitorização entre a
subestação e o local de monitorização e o centro de controlo remotos, respetivamente.
⟹ Por fim, as interfaces 2 e 11 representam a comunicação entre subestações. As informações
trocadas são relativas a mensagens de proteção e controlo, realizando funções como proteção de linha
de distância ou interlocking.
Figura 18 - Interfaces lógicas entre duas subestações [23]
3.5. Comunicação
De modo a utilizar a capacidade de comunicação da subestação, e para implementar os
serviços necessários, a norma CEI 61850 utiliza o modelo OSI de 7 camadas (ISO/IEC 7498-1) assim
como diversos protocolos como TCP/IP, MMS e SNTP. O modelo de referência OSI é um modelo
baseado no conceito de camadas de comunicação sobrepostas, cada uma com uma função específica.
O modelo representa por camadas as diferentes fases que uma mensagem atravessa entre a
sua emissão e receção. À medida que uma mensagem percorre as camadas até ao meio físico de
transmissão, cada camada acrescenta o seu próprio cabeçalho. Deste modo, o pacote a ser transmitido
inclui, além da mensagem, os cabeçalhos de todas as camadas do modelo. Após a receção, a
mensagem é processada nas camadas que possuem os cabeçalhos originados pelas camadas
homólogas do servidor do cliente, havendo independência entre os diversos protocolos.
A arquitetura utilizada na norma CEI 61850 não implementa todas as sete camadas do modelo
OSI. O Perfil de Aplicação inclui as camadas de aplicação, apresentação e sessão do modelo, enquanto
o Perfil de Transporte inclui as camadas de transporte, rede, ligação e física. Na Figura 19 é possível
identificar quais os protocolos correspondem às camadas existentes do modelo OSI.
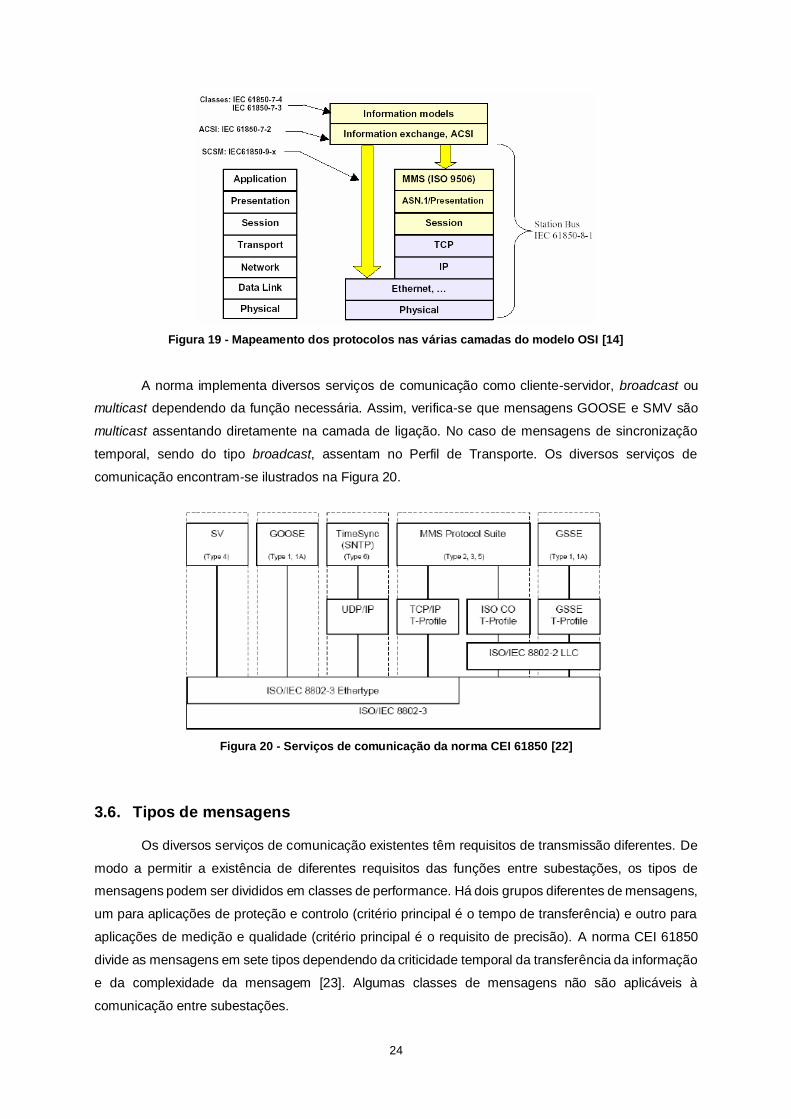
24
Figura 19 - Mapeamento dos protocolos nas várias camadas do modelo OSI [14]
A norma implementa diversos serviços de comunicação como cliente-servidor, broadcast ou
multicast dependendo da função necessária. Assim, verifica-se que mensagens GOOSE e SMV são
multicast assentando diretamente na camada de ligação. No caso de mensagens de sincronização
temporal, sendo do tipo broadcast, assentam no Perfil de Transporte. Os diversos serviços de
comunicação encontram-se ilustrados na Figura 20.
Figura 20 - Serviços de comunicação da norma CEI 61850 [22]
3.6. Tipos de mensagens
Os diversos serviços de comunicação existentes têm requisitos de transmissão diferentes. De
modo a permitir a existência de diferentes requisitos das funções entre subestações, os tipos de
mensagens podem ser divididos em classes de performance. Há dois grupos diferentes de mensagens,
um para aplicações de proteção e controlo (critério principal é o tempo de transferência) e outro para
aplicações de medição e qualidade (critério principal é o requisito de precisão). A norma CEI 61850
divide as mensagens em sete tipos dependendo da criticidade temporal da transferência da informação
e da complexidade da mensagem [23]. Algumas classes de mensagens não são aplicáveis à
comunicação entre subestações.

25
⟹ Tipo 1 – Mensagens de alta velocidade
As mensagens deste tipo contêm informação binária simples e são críticas no tempo, sendo
que o DEIs que recebe a mensagem deve atuar imediatamente.
- Tipo 1A – “Trip”
Este é o tipo de mensagem mais importante na subestação. Entre subestações as mensagens
“block” e “release” podem ter uma importância semelhante. Dada a sua elevada importância os
requisitos de transmissão deste tipo de mensagem são os mais exigentes.
a) Para “trips” dentro de uma bay, o tempo de transferência deve ser inferior a 4 ms.
b) Para “trips” entre bays, devem ser suportados tempos de transferência inferiores a 10 ms.
c) Para “trips” entre subestações os tempos de transferência para as diferentes classes de
performance de mensagens, como definidos na norma CEI 60834-1, são:
Tabela 2 - Classe de performance para mensagens tipo 1A entre subestações [23]
- Tipo 1B – “Automation”
Este tipo de mensagens possui requisitos menos exigentes que as de tipo 1A, porém são ainda
mensagens muito importantes para o funcionamento da subestação e a interação entre os DEIs. Estas
classes de performance de mensagens são válidas para mensagens tanto dentro da subestação como
entre subestações.
a) Para aplicações de estado rápido, o tempo de transferência não deve exceder 20 ms.
b) Em aplicações de estado normal, o tempo de transferência deve ser inferior a 100 ms.
⟹ Tipo 2 - Mensagens de velocidade média
O tempo de transmissão é ainda importante porém menos crítico que para mensagens do tipo
1. As mensagens são marcadas antes do envio com um time-stamp usando o relógio interno do
emissor. Exemplo: valores eficazes de sinais medidos.
⟹ Tipo 3 - Mensagens lentas
Estas mensagens são mais complexas e utilizadas em funções como informação e gravação
de eventos ou funções de autocontrolo. Não aplicável a comunicação entre subestações.
⟹ Tipo 4 - Raw data
Estas mensagens contêm dados brutos amostrados de transformadores de medida ou
dispositivos de proteção, caracterizadas por amostras de corrente e tensão. A informação é um fluxo
contínuo de amostras sincronizadas. Como estas mensagens são fundamentais para assegurar a
proteção de equipamentos, o seu tempo de transferência deve estar de acordo com o definido para as
mensagens de alta velocidade, Tipo 1A.
Classe de performance Tempo de transferência
TR1 ≤ 4 ms
TR2 ≤ 10 ms
TR3 ≤ 15 ms
TR4 ≤ 20 ms
TR5 > 20 ms
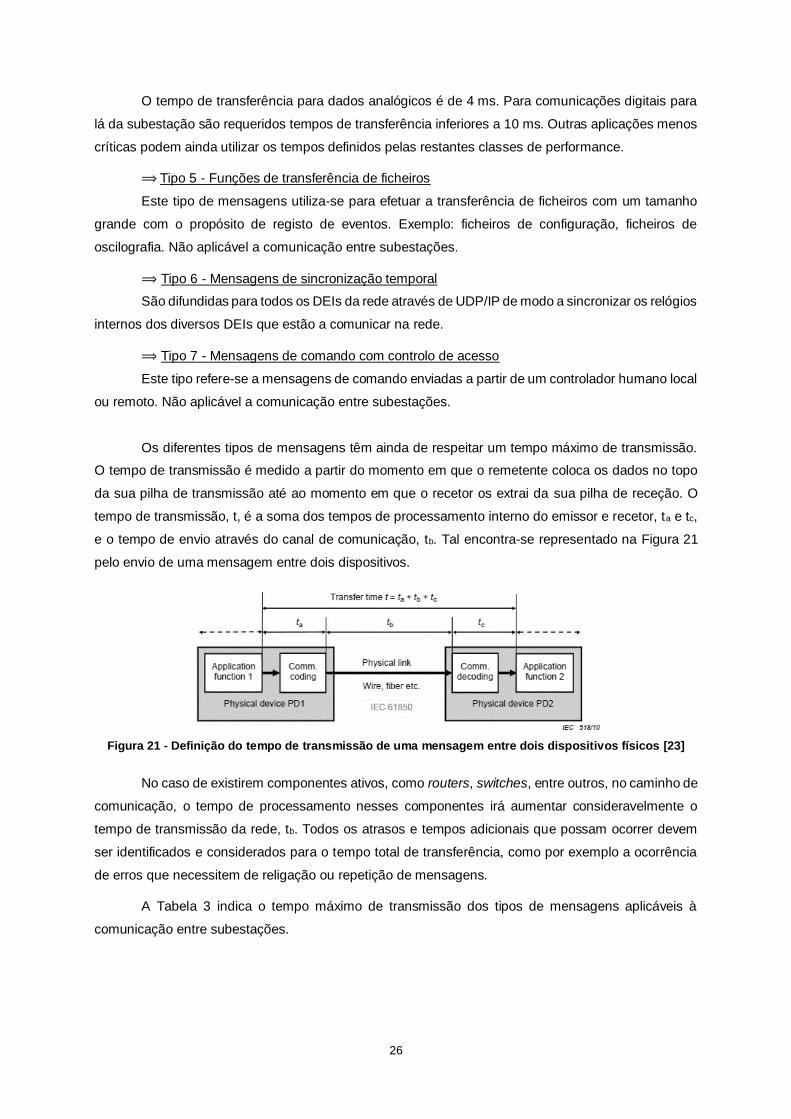
26
O tempo de transferência para dados analógicos é de 4 ms. Para comunicações digitais para
lá da subestação são requeridos tempos de transferência inferiores a 10 ms. Outras aplicações menos
críticas podem ainda utilizar os tempos definidos pelas restantes classes de performance.
⟹ Tipo 5 - Funções de transferência de ficheiros
Este tipo de mensagens utiliza-se para efetuar a transferência de ficheiros com um tamanho
grande com o propósito de registo de eventos. Exemplo: ficheiros de configuração, ficheiros de
oscilografia. Não aplicável a comunicação entre subestações.
⟹ Tipo 6 - Mensagens de sincronização temporal
São difundidas para todos os DEIs da rede através de UDP/IP de modo a sincronizar os relógios
internos dos diversos DEIs que estão a comunicar na rede.
⟹ Tipo 7 - Mensagens de comando com controlo de acesso
Este tipo refere-se a mensagens de comando enviadas a partir de um controlador humano local
ou remoto. Não aplicável a comunicação entre subestações.
Os diferentes tipos de mensagens têm ainda de respeitar um tempo máximo de transmissão.
O tempo de transmissão é medido a partir do momento em que o remetente coloca os dados no topo
da sua pilha de transmissão até ao momento em que o recetor os extrai da sua pilha de receção. O
tempo de transmissão, t, é a soma dos tempos de processamento interno do emissor e recetor, ta e tc,
e o tempo de envio através do canal de comunicação, tb. Tal encontra-se representado na Figura 21
pelo envio de uma mensagem entre dois dispositivos.
Figura 21 - Definição do tempo de transmissão de uma mensagem entre dois dispositivos físicos [23]
No caso de existirem componentes ativos, como routers, switches, entre outros, no caminho de
comunicação, o tempo de processamento nesses componentes irá aumentar consideravelmente o
tempo de transmissão da rede, tb. Todos os atrasos e tempos adicionais que possam ocorrer devem
ser identificados e considerados para o tempo total de transferência, como por exemplo a ocorrência
de erros que necessitem de religação ou repetição de mensagens.
A Tabela 3 indica o tempo máximo de transmissão dos tipos de mensagens aplicáveis à
comunicação entre subestações.

27
Tabela 3 - Tempo máximo de transmissão de alguns tipos de mensagens
As mensagens de tipo 4, como são distintas das restantes mensagens possuem outras
características importantes como o débito de transmissão e a resolução. Verifica-se que para a classe
de performance mais exigente o tempo máximo de transmissão é de 4 ms, a resolução de 18 bits e o
débito de transmissão de 1920 amostras/segundo [23].
As mensagens de sincronização temporal não têm requisitos de tempo de transmissão. Porém,
possuem classes de performance relativas à precisão da sincronização dos dispositivos da rede, com
a classe a T1 requerer uma precisão de 1 ms e a classe T2 de 0,1 ms [23].
3.7. Mensagens GOOSE
No contexto abordado, a comunicação horizontal realiza-se através de mensagens Generic
Object Oriented Substation Events, GOOSE. Este serviço agrupa dados numa mensagem e transmite-
a rapidamente, permitindo comunicação em tempo real. Para garantir a rapidez na transmissão, as
mensagens GOOSE são embebidas em pacotes de dados Ethernet. As mensagens não são orientadas
à ligação, sendo enviadas através de multicast e atingem de forma rápida todos os dispositivos da rede.
Porém, apesar de todos os dispositivos receberem a mensagem, apenas os dispositivos interessados
irão utilizar a informação da mensagem.
O tráfego GOOSE é assíncrono, não solicitado, crítico e de alta prioridade. Tem um tamanho
de frame aproximado de 300 bytes. Este tipo de mensagens envia mensagens periódicas de estado
com um intervalo regular Tmax, geralmente entre 1 a 60 segundos, quando não há qualquer evento.
Assim, em 99% do tempo são apenas enviadas mensagens de estado [25]. Dada a inexistência de
confirmação da receção das mensagens, utiliza-se um esquema de retransmissão visando garantir a
sua entrega, caso ocorra um extravio. Quando ocorre um novo evento, a retransmissão da mensagem
anterior é cancelada e é iniciada a transmissão de uma rajada de 5-6 mensagens que refletem o novo
estado. O envio destas mensagens é feito em intervalos variáveis e crescentes até ser atingido o
intervalo regular Tmax, tal como ilustrado na Figura 22.
Figura 22 - Esquema de retransmissão de mensagens GOOSE após a ocorrência de um evento [25]
Tipo Tempo máximo de transmissão
4 ms (TR1)
10 ms (TR2)
20 ms
100 ms
2 100 ms
1
Velocidade média
Nome
1A "Trip"
1B
"Automation"
Rápida

28
3.8. Comunicação entre subestações
O tempo de transmissão das mensagens é um requisito básico na teleproteção. Esse tempo é
inversamente proporcional à largura de banda, em bps, disponibilizada para a comunicação.
Normalmente os comandos de teleproteção para esquemas de proteção de distância, em redes de
energia elétrica, são transmitidos por equipamentos de transmissão de sinal de proteção, através de
ligações ponto-a-ponto. Os sistemas de teleproteção dedicados monitorizam o estado do sistema de
comunicações para averiguar a sua saúde, por exemplo através de mensagens de teste de trocadas
periodicamente.
Na Figura 23 ilustra-se um modelo simples de comunicação entre subestações. Neste caso,
uma mensagem é enviada da função B2 existente na subestação B para a função A2 na subestação
A. Para implementar os mecanismos de comunicação são consideradas duas abordagens distintas,
tunneling e gateway.
Figura 23 - Estrutura simplificada de comunicação ente subestações [23]
Tunneling
A utilização de tunneling permite o acesso direto às funções (ou nós lógicos) de uma
subestação, como representado na Figura 24. As mensagens são encaminhadas de forma
transparente, não existindo perda de informação na conversão da mensagem na interface entre a rede
local da subestação e a WAN que liga as instalações.
O tunneling é um método utilizado para transferir um pacote de dados de um protocolo
utilizando um meio de transmissão assente em outro protocolo, o que de outra forma não era possível.
O seu funcionamento implica o encapsulamento dos pacotes do seu protocolo original para o protocolo
de tunneling, sendo posteriormente enviados através do túnel.
A mensagem, pertencente ao protocolo passageiro (incompatível com a rede), ao chegar ao
router de entrada da rede é encapsulada, isto é, adiciona-se um cabeçalho que a adapta ao protocolo
do túnel e possibilita o seu roteamento através da rede. O túnel, que representa um caminho lógico por
onde a mensagem deve viajar, é criado e a mensagem é roteada entre as suas extremidades. Quando
a mensagem atinge o ponto final do túnel onde está o router de saída, é desencapsulada através da
remoção do cabeçalho e o conteúdo original é entregue na rede de destino.

29
A utilização de tunneling para transmissão de mensagens quebra a restrição de usar
mensagens GOOSE apenas em LAN e entrega as mensagens necessárias através da rede a outra
LAN, que as mensagens não conseguiriam alcançar diretamente. A troca de mensagens GOOSE
requer um atraso e tempo de transmissão baixo, o que implica uma largura de banda elevada das
ligações utilizadas.
Figura 24 - Comunicação entre subestações utilizando tunneling [23]
Gateway
Este tipo de ligação estabelece acesso indireto às funções da estação remota. O uso desta
abordagem é feito para ligações entre subestações que não suportam completamente comunicações
Ethernet, como PLC ou rádio.
Uma configuração em gateway tem conhecimento da informação presente nas mensagens que
transmite, sendo configurada especificamente para o seu envio. As mensagens transmitidas são
modificadas para transmissão através da WAN, com a informação relevante extraída e embebida numa
mensagem de tipo diferente. Assim, do ponto de vista da CEI 61850, a transmissão da mensagem não
é transparente. Como tal, a gateway tem de ser reconfigurada quando a informação trocada entre
funções se altera ou são utilizadas funções adicionais.
Para aplicações de teleproteção esta abordagem permite usar equipamento de teleproteção
convencional, que inclui a funcionalidade de supervisão e monitorização de canal, e que é projetado
para conferir comandos de proteção seguros e fiáveis com baixo atraso através de tecnologias com
largura de banda limitada.
Na configuração denominada proxy gateway, o equipamento de teleproteção do lado recetor
atua como um proxy para a função no lado de envio, como descrito na Figura 25. Isto significa que
recria a interface e o comportamento da função real, na comunicação entre as funções. Em GOOSE,
as mensagens são publicadas pelo proxy com o mesmo formato que no lado da estação remota.
O equipamento de teleproteção pode fornecer capacidades que tornam mais eficiente o uso do
mecanismo de comunicação. Por exemplo, para GOOSE, apenas as mudanças de estado podem ser
transmitidas enquanto as retransmissões com informação de estado constante podem ser filtradas pelo
lado do remetente e serem recriadas localmente pelo proxy do extremo oposto.

30
Figura 25 - Comunicação entre subestações utilizando o esquema de proxy gateway [23]

31
Capítulo 4
4. Desempenho do Sistema de Automação de Subestações
O desempenho da rede de comunicações depende de múltiplos fatores como a sua topologia,
fiabilidade e disponibilidade. A análise das diversas opções existentes, das suas capacidades e
comportamento é fundamental para a avaliação das tecnologias a utilizar e para o desenvolvimento do
melhor esquema especial de proteção.
4.1. Fiabilidade e disponibilidade da rede
A disponibilidade é a habilidade de um equipamento ou sistema realizar uma função requerida,
num dado instante, sendo um dos requisitos mais importantes na implementação com sucesso de um
SAS, recorrendo à norma CEI 61850. A especificação da disponibilidade do SAS está indicada na
norma CEI 61970-4 Secção-3.3. Dado utilizarem-se dispositivos de comunicação com circuitos
eletrónicos integrados, estes são bastante suscetíveis à interferência eletromagnética ambiente da
subestação, o que pode por em causa o seu bom funcionamento e por conseguinte a sua
disponibilidade.
De acordo com a norma CEI 60870-4, a fiabilidade é definida como uma medida de um
equipamento ou sistema para desempenhar a função para o qual está desenhado, sob condições
específicas, durante um dado período de tempo [24]. Seguindo os requisitos de fiabilidade descritos
em CEI 61850-3, não deve haver um “single point of failure” que cause a inoperabilidade de todo o
sistema. Adicionalmente indica-se que a falha de um qualquer componente não pode resultar na perda
de funções que resulte numa falha em cadeia de outros componentes. Tendo isto em conta, o SAS
deve continuar o seu correto funcionamento no caso de algum componente do sistema falhar. A CEI
61850-3 Secção 4 descreve as seguintes medidas de fiabilidade:
⟹ Mean Time To Failure (MTTF);
⟹ Mean Time Between Failures (MTBF);
⟹ Mean Time To Repair (MTTR).
Para se atingir uma fiabilidade aceitável é necessário que o MTTF e MTBF dos dispositivos
utilizados no sistema sejam elevados [3]. Outro fator que contribui para o aumento da fiabilidade é a
redução do número de equipamentos utilizados e a alocação correta de funções.
Relativamente à disponibilidade, podem ser utilizados diversos mecanismos, como a
implementação de redundância nas comunicações da subestação. As funções proporcionadas pela
comunicação em rede e pela utilização de DEIs, que monitorização as ligações, diminuem
drasticamente o tempo de deteção de erros, aumentando a disponibilidade do sistema.

32
4.2. Redundância e tolerância a falhas
Sendo que o SAS realiza funções críticas de proteção e controlo, a rede de comunicações deve
estar sempre disponível e nas melhores condições de funcionamento. Em anexo apresentam-se
exemplos de múltiplas topologias usadas em SAS. A rede de comunicações interna da subestação
pode ser desenhada com base em diversas topologias, que diferem entre si na distribuição dos
dispositivos e suas ligações. Por tal facto estas topologias apresentam características distintas,
nomeadamente a redundância introduzida, a resistência a falhas, o desempenho e o seu custo geral.
Não existe uma topologia ideal que se adeque a todas as situações que ocorrem. Idealmente, dada a
utilização de aplicações críticas, deve ser utilizada uma topologia capaz de ser resistentes à falha de
qualquer ponto da rede. Com o uso de redundância é possível maximizar a fiabilidade, disponibilidade
e estabilidade do sistema, minimizar o seu tempo de recuperação em caso de falha e conseguir uma
melhor relação custo-benefício. Em topologias de rede redundantes, um caminho de backup é
utilizando quando parte da rede torna-se indisponível.
A norma CEI 62439 apresenta o conceito de redes de alta disponibilidade e define diversos
protocolos que permitem a recuperação da rede em "tempo nulo", estando este conceito incluído na
Edição 2 da CEI 61850. Dos protocolos propostos, os suportados pela CEI 61850 são PRP e HSR,
sendo soluções ideais quando a perda de dados não é permitida em falhas da rede.
Rapid Spanning Tree Protocol – RSTP
Este protocolo é utilizado principalmente na topologia em anel, de forma a prevenir loops de
tráfego na rede. Os switches Ethernet não lidam da melhor forma com a presença de loops na rede,
pois sem o uso de um mecanismo de gestão, as mensagens irão circular indefinidamente e
eventualmente consumir toda a largura de banda disponível na ligação. Assim, o loop é identificado e
as mensagens são impedidas de circular neste. Para tal, uma das ligações entre os switches serve
como caminho de backup, para que não haja tráfego que passe nessa ligação, quebrando assim
quaisquer loops físicos na rede. Quando existe a falha de uma ligação entre switches, o caminho em
reserva é reativado e a comunicação passa a ser feita por dois caminhos distintos restaurando a
conectividade de todos os dispositivos.
O Rapid Spanning Tree Protocol, IEEE 802.1W, é uma variante mais rápida do Spanning Tree
Protocol, IEEE 802.1D. Enquanto o primeiro permite tempos de recuperação da rede de até 2
segundos, o STP pode levar até 60 segundos para reestabelecer a ligação, não sendo este tempo
determinístico [34]. O tempo de recuperação aumenta ainda com o tamanho do anel. Apesar de o
tempo de recuperação do RSTP ser suficiente para a grande maioria das aplicações, no caso estudado,
onde são utilizadas funções críticas, tal não é suficiente, sendo requerido tempo de recuperação igual
a zero de modo a não se verificar a perda das mensagens transmitidas.

33
Parallel Redundancy Protocol – PRP
O Parallel Redundancy Protocol é definido na CEI 62439-3. Este protocolo atinge tempo de
recuperação nulo, não se verificando perda de pacotes, tolera a falha de qualquer componente da rede
e pode ser utilizado em qualquer topologia de rede. O princípio de operação do PRP é simples,
utilizando-se duas redes não relacionadas e fisicamente independentes. As duas redes podem diferir
no desempenho e topologia, assim como no atraso de transmissão. A ligação entre as duas redes é
feita por nós duplamente ligados que implementam o PRP. A ligação dos DEIs pode ser feita
diretamente apenas a uma das redes, ou às duas redes em simultâneo utilizando uma caixa de
redundância. Tal como indicado na Figura 26, o funcionamento deste protocolo implica o envio de duas
mensagens idênticas, através de cada uma das redes. Estas mensagens atravessam as duas redes
com atraso diferente, mas idealmente chegam ao nó de destino simultaneamente. À mensagem é
adicionado um campo que indica o seu número de série que é verificado à chegada, mantendo-se a
primeira mensagem recebida e descartando-se a segunda [32].
Figura 26 - Diagrama de uma rede que implementa PRP [32]
Esta opção tem como desvantagem a duplicação do número de switches utilizados, o que
aumenta bastante o custo de todo o sistema. O controlo de redundância das mensagens recebidas
também se pode revelar complexo, pois é necessário processar a mensagem recebida antes de
determinar se esta é duplicada. A redundância introduzida é estática, não havendo qualquer
reconfiguração da rede, como acontece com o RSTP.
High-availability Seamless Redundancy – HSR
O protocolo HSR encontra-se definido em CEI 62439-3, sendo possível a sua utilização em
qualquer switch Ethernet industrial, de acordo com CEI 61784-2. Este protocolo assegura um tempo de
recuperação nulo e a entrega de pacotes, no caso de falha de um único ponto da rede. Os dispositivos
(nós) podem ser dispostos em anel, permitindo a operação sem switches dedicados, o que elimina a
necessidade desses equipamentos, contribuindo para aumentar a fiabilidade do sistema e para a
redução do custo da instalação [32]. Pode ainda ser utilizado com diversas topologias, nomeadamente
para a interligação de anéis múltiplos.

34
Os nós da rede HSR são ligados por duas portas Ethernet. O nó emissor faz o envio da mesma
mensagem, pelas duas portas, que circulam em direções opostas da rede, como mostrado na Figura
27, sendo que a mensagem duplicada é removida no nó de chegada. Após ocorrer uma falha na rede,
a mensagem continua a atingir o seu destino, pelo caminho que se encontra em condições corretas de
funcionamento, não sendo verificado um aumento da latência da rede. Porém, o tráfego atravessa
todos os dispositivos o que reduz levemente a largura de banda disponível para mensagens multicast.
Figura 27 - Diagrama de uma rede que implementa HSR [32]
4.3. Transmissão de mensagens entre subestações
As mensagens GOOSE, que operam na camada 2 do modelo OSI, utilizam o protocolo Ethernet
como meio de transmissão em SAS. Porém, verificam-se os seguintes problemas com a utilização de
Ethernet para a transmissão de mensagens entre subestações [28]:
a) Ethernet não foi desenvolvida para a comunicação em WAN (Wide Area Network);
b) Não é um protocolo roteável, o que implica que os routers bloqueiem as mensagens GOOSE,
não permitindo a sua saída da rede local;
c) Ao alargar o domínio de transmissão de mensagens para fora da subestação, pode-se
desestabilizar a rede, o que implicaria tempos de recuperação imprevisíveis.
Um router tem como função examinar as mensagens recebidas e encaminhá-las para o seu
destino, fazendo a fronteira entre a rede local e a rede remota, e isolando o tráfego de cada uma das
redes, como visto na Figura 28.
Figura 28 - Transmissão de mensagem GOOSE bloqueada pelo router [53]
Para contornar esta situação é necessário utilizar métodos de tunneling, que recorre a
diferentes tecnologias de encapsulamento e protocolos de transmissão para criar túneis virtuais através
de uma rede. Assim é possível o envio de mensagens GOOSE em WAN. Desta forma, a mensagem

35
irá ser encapsulada utilizando um protocolo diferente e passar num túnel especialmente configurado,
que permite a sua transmissão, como ilustrado na Figura 29. Os métodos aplicáveis distinguem-se pelo
tipo de protocolo utilizado para criar o túnel e encapsular os dados. O tunneling na camada 3, isto é na
camada de rede, está confinado ao uso em rede baseadas em IP, envolvendo a adição de uma
cabeçalho IP à mensagem original antes do seu envio. O tunneling na camada 2, ligação de dados,
pode utilizar diferentes protocolos e utiliza frames para encapsular os dados. Neste trabalho, as
técnicas com especial interesse são o MPLS e o PBB, e suas variantes, cujas suas propriedades, e de
outros mecanismos podem ser consultadas em anexo [1, 6].
Figura 29 - Mensagem GOOSE enviada através da WAN utilizando um túnel [53]
4.4. Mecanismos utilizados na melhoria do desempenho da rede
Com as redes a crescerem em tamanho e complexidade, é essencial que existam formas
eficazes de gerir o volume crescente de tráfego na rede. O desempenho em tempo real da rede de
comunicações deve ser o mais determinista possível. Desse modo, são usados diversos mecanismos
que contribuem para a melhoria do desempenho e estabilização da latência da rede. Estes mecanismos
são funcionalidades avançadas disponibilizadas por managed switches.
O congestionamento da rede é um dos fatores mais importantes e que deve ser evitado. Esta
situação ocorre quando várias mensagens competem pelo mesmo caminho na rede Ethernet. Dado
que as mensagens não podem ser transmitidas simultaneamente, enquanto ocorre uma transmissão,
as restantes têm de aguardar numa fila. Se durante algum tempo, os pacotes que chegam excederem
a capacidade da porta, o tamanho da fila aumenta e eventualmente alguns pacotes são descartados.
Um mecanismo básico usado em switches para assegurar que não há colisões entre pacotes é o uso
de IEEE 802.3x Full-Duplex, o que torna o atraso bastante mais determinístico.
Gestão de multicast
Tal como já referido, as mensagens GOOSE e SMV são enviadas através de multicast, sendo
distribuídas por toda a rede, no caso de não serem impostas restrições. Isto pode implicar que a rede
interna da subestação, assim como a rede que interliga subestações, fiquem inundadas de mensagens,
o que pode levar a que mensagens críticas para o funcionamento do sistema sejam atrasadas ou
descartadas. A má gestão do multicast dá origem a um consumo muito elevado de largura de banda
da rede e ao aumento da latência nos switches.

36
Na Figura 30 identifica-se na esquerda o envio de mensagens SMV por parte da MU, a
vermelho, para um pequeno grupo de DEIs (P). Como as mensagens enviadas são multicast, verifica-
se que todos os nós da rede as vão receber, tal como visto na figura à direita. Assim, conclui-se que o
multicast tem de ser filtrado. A filtragem permite poupar largura de banda e diminuir a latência da rede,
limitando o tráfego apenas a áreas restritas da rede, impedindo por exemplo que dispositivos com
grande saída de tráfego, como MUs, não inundem toda a rede da subestação [13]. O método mais
habitual da restrição de tráfego multicast é o uso de redes virtuais.
Figura 30 - Envio de mensagens por multicast [13]
Há ainda opção de utilizar GMRP (GARP Multicast Registration Protocol), definido em IEEE
802.1D. Este mecanismo faz a alocação de endereços multicast, o que melhora os tempos de
processamento nos dispositivos recetores, descartando tráfego não desejado ao nível de hardware.
Assim as mensagens apenas são entregues aos destinos definidos, em vez de serem distribuídas por
toda a rede. Estas mensagens são filtradas nos switches e utilizadas apenas pelos DEIs que as
requereram. Para um DEI receber as mensagens é necessário juntar-se a um grupo multicast. Os
controladores de rede possuem uma “hash table” que mapeia todos os endereços MAC multicast
possíveis para um pequeno grupo de endereços. Ao ser feito o envio de uma mensagem multicast, esta
apenas é distribuída pelas portas que estão ligadas aos membros do grupo multicast.
Redes virtuais
Uma rede virtual (Virtual LAN – VLAN), definida na norma IEEE 802.1Q, é uma rede Ethernet
independente, permitindo as vantagens de uma rede lógica separada, que partilha a sua infraestrutura
física com outras redes. Cada VLAN possui um domínio de broadcast separado, o que permite a
separação lógica da rede para diferentes aplicações. Como tal, as mensagens de uma VLAN não são
transmitidas para outra rede. Por razões de gestão e de segurança, muitas vezes é desejável manter
determinados dispositivos e funções organizadas, ou limitadas, a uma única rede física de subestações.
No entanto, podem existir restrições físicas que tornam impossível de fazê-lo. Assim, os dispositivos
conectados a diferentes redes físicas podem ser incluídos na mesma VLAN, o permitindo a sua
comunicação. Por outro lado é também possível atribuir diferentes VLANs a dispositivos na mesma

37
rede física, impedindo-os de comunicar entre si. Isto permite conferir uma grande flexibilidade à
estrutura da rede, que é uma característica especialmente valiosa em subestações.
A segregação de tráfego permite restringir de certos tipos de tráfego a determinados segmentos
da rede, poupando assim largura de banda. Uma boa prática é a utilização de diferentes VLANs para
diferentes tipos de tráfego como por exemplo, comunicação entre subestações, mensagens GOOSE e
valores amostrados [34]. Devem também separar-se aplicações em tempo real de outras menos
críticas. Para tal devem ser criadas redes virtuais e atribuir identificadores de uma rede, VLAN-ID,
apenas aos DEIs que pertencem a uma dada aplicação e irão necessitar dessas mensagens, fazendo
separação de tráfego. As mensagens são impedidas de extravasar para lá da rede onde são enviadas,
o que limita a possibilidade de uma rede ser inundada por mensagens que não são necessárias ao seu
funcionamento.
A segregação fornece um mecanismo de segurança poderoso, pois os utilizadores e DEIs de
uma VLAN não podem comunicar com outras redes, a menos que um router com as devidas
permissões seja utilizado para as interligar. Apresenta-se na Figura 31 um exemplo de segregação de
tráfego numa subestação utilizando diferentes redes virtuais.
Figura 31 - Segregação de tráfego utilizando diferentes VLANs [13]
Para possibilitar o envio de mensagens nestas redes, acrescenta-se um cabeçalho adicional
ao pacote Ethernet, como é possível verificar na Figura 32. Este cabeçalho adiciona um número de
identificação de 12 bit, VLAN-ID ou VID, e um nível de prioridade a cada pacote. Com recurso ao VLAN-
ID podem configurar-se os switches para as diferentes redes que aceitam em cada uma das suas
portas. Assim, atribuindo um VLAN-ID usado para proteção apenas a portas ligadas aos DEIs de
proteção, separa-se o tráfego das duas redes, garantindo que a rede da subestação não é inundada
por pacotes provenientes dessa porta.

38
Figura 32 - Estrutura de uma frame na VLAN [13]
Separação do Bus de Processo e Bus de Estação
Antes da utilização da norma CEI 61850 não existia o conceito de bus de processo, sendo essa
função desempenhada por ligações de cobre convencionais. Com a norma foi criado este bus, que faz
a ligação entre os níveis de estação e de bay. Os dois buses utilizados pela norma CEI 61850 são
logicamente diferentes, como mostrado na Figura 33, daí ser uma boa prática a sua separação. Essa
separação evita que o tráfego multicast do bus de processo inunde toda a rede, o que a pode tornar
inoperável. Tendo em conta que uma única MU consome cerca 5 Mbps de largura de banda [13],
haveria o risco de o bus de estação ser congestionado por tráfego que não lhe é destinado.
A separação das redes pode ser física ou lógica. A utilização de LANs fisicamente
independentes é mais dispendiosa, pois duplica o número de switches. A separação lógica é mais
flexível, permitindo o acesso às MU por SCADA para funções remotas de manutenção ou gestão.
Contudo, esta solução requer uma maior engenharia da rede e a utilização de métodos mais
sofisticados como redes virtuais.
Figura 33 – Bus de processo e estação separados (esquerda) e comuns (direita) [3]
Priorização de tráfego (Priority Tagging)
Por padrão, todo o tráfego recebido à entrada de um switch Ethernet é processado de acordo
com o mecanismo FIFO (First In, First Out). Esta situação pode levar ao atraso e perda de mensagens
importantes ou causar congestionamento da rede.

39
A qualidade de serviço (QoS) é uma ferramenta importante para garantir que os dados mais
críticos são entregues de forma consistente e previsível. Com a utilização da IEEE 802.1p, os switches
podem priorizar o tráfego da rede, para que os comandos críticos de proteção sejam transmitidos mais
rapidamente. As funções de QoS ajudam a garantir que o desempenho da rede do SAS é confiável e
previsível. As frames são marcadas com diferentes níveis de prioridade de modo a assegurar que o
tráfego em tempo crítico é sempre transportado na rede, mesmo durante períodos de grande
congestionamento. Quando uma frame chega à entrada de um switch, a sua etiqueta de prioridade
(priority tag) é analisada. Ao ser determinado que a frame pertence a um nível de prioridade elevado,
o seu envio é realizado antes de outras frames com menor prioridade que chegaram antes à fila, como
mostrado na Figura 34. Tal permite que o tráfego de aplicações sensíveis no tempo, como GOOSE e
SMV, possuam uma latência mais reduzida e um comportamento mais determinístico. O priority tagging
partilha o mesmo cabeçalho da frame Ethernet utilizado pelas VLAN e mostrado na Figura 32.
Figura 34 - Representação do mecanismo de priorização de tráfego [34]
Segurança do tráfego
A segurança da rede é uma questão crítica em SAS. De modo a garantir a segurança das
mensagens, cada pacote Ethernet possui um campo de 4 bytes CRC (Cyclic Redundancy Check) tal
como indicado na Figura 35. A existência do campo CRC garante uma probabilidade de obtenção de
um pacote não desejado inferior a 10-9 [23].
Figura 35 - Estrutura de um pacote Ethernet [2]
O acesso à rede e às suas mensagens deve ser restringido utilizando mecanismos como redes
virtuais, autenticação ou encriptação de mensagens. A autenticação utiliza procedimentos que
certificam a fonte de um pacote recebido, assegurando que apenas sejam aceites mensagens de fontes
seguras. Tem como desvantagem um maior tempo de processamento, o que pode influenciar
decisivamente mensagens em tempo crítico. O sistema deve também estar seguro contra invasões
externas e os equipamentos físicos devem ser protegidos, não permitindo pontos de acesso
disponíveis.
40
Sincronização temporal
A norma CEI 61850-9 [20] propõe que os valores dos transformadores de medida sejam
digitalizados para as MU e transmitidos pelo bus de processo. O fluxo de valores amostrados deve
estar sincronizado, de modo a que as funções de proteção possam utilizar os valores provenientes de
diferentes MU. A CEI 61850 propõe a implementação de sincronização temporal utilizando Simple
Network Time Protocol – SNTP. Contudo, esta solução possui uma precisão de cerca de 1 ms, o que
se pode revelar insuficiente para dados de valores amostrados.
O uso de IEEE 1588 (Precision Time Protocol – PTP) consegue uma precisão de cerca de 1 μs
[16]. Para tal deve existir uma fonte de sincronização entre todas as subestações, que atualmente
recorre a GPS. Esta dependência de uma fonte externa de sincronização deve ser considerada na
disponibilidade de todo o sistema, pois a sua integridade pode ser posta em causa, no caso de mau
funcionamento das funções de controlo e proteção.
41
Capítulo 5
5. Tecnologias de comunicação
Usualmente as proteções convencionais utilizavam comunicação ponto-a-ponto. Porém, esta
situação encontra-se a ser gradualmente substituída por comunicações em rede. Deste modo, todas
as comunicações da utillity como monitorização, medição, controlo, proteção, entre outras aplicações
podem ser transportadas por estas redes.
As aplicações de proteção possuem requisitos bastante restritos relativamente ao desempenho
do canal de comunicação. Devem ter uma latência muito baixa e com pouca variação, uma taxa de
erros reduzida, alta disponibilidade, tempos de atuação determinísticos e alta segurança. O tráfego
utilizado por comunicações de proteção é uma parte muito pequena do tráfego total que circula na rede.
Assim, pode não ser possível justificar um grande investimento em comunicações de grande
desempenho, que cumpram as condições específicas impostas pela proteção. Contudo, estas
comunicações são críticas para o funcionamento do sistema elétrico, pelo que não podem ser
menosprezadas, sendo necessário garantir o seu funcionamento correto. Deve existir um compromisso
entre o custo da solução e as necessidades das aplicações, tentando desenvolver proteções que
possam funcionar sobre canais de comunicação usuais.
5.1. Identificação de tecnologias
Os primeiros canais de telecomunicação instalados para proteção foram realizados com
recurso a linhas telefónicas analógicas. Com a evolução das telecomunicações para comunicações
digitais, também as proteções seguiram esta tendência. A escolha da tecnologia para realizar a
proteção é influenciada por diversos fatores como [50]:
⟹ Cobertura: capacidade do sistema cobrir um determinado território.
⟹ Latência: atraso entre a ocorrência de um evento e a tomada da ação correspondente.
⟹ Transferência de dados: quantidade de informação que pode ser transmitida/tempo (bps).
⟹ Segurança: habilidade em prevenir o uso não autorizado do sistema.
⟹ Custo: custo de instalação, manutenção e operação do sistema.
⟹ Disponibilidade e fiabilidade: habilidade do sistema realizar a sua função num dado
momento.
A comunicação pode ser dividida, de uma forma simples, em transmissão com e sem fios. Mais
recentemente, devido à grande evolução tecnológica, a utilização de comunicações sem fios para
aplicações em SAS alterou o paradigma das comunicações. Quando comparadas com comunicações
com fios convencionais, estas tecnologias têm vantagem no acesso a locais remotos, devido à
poupança no custo das infraestruturas e à sua instalação rápida. As ligações sem fios sofrem bastante

42
de limitações de largura de banda, vulnerabilidade a interferências eletromagnéticas e objetos que
obstruam a propagação do sinal. Outro fator importante é a segurança das comunicações, sendo a
transmissão sem fios mais vulnerável a ataque de utilizadores não autorizados. A utilização de
comunicações com fios é mais fiável, garantindo um desempenho mais estável e determinístico, além
de atingir largura de banda mais elevada e menor latência na ligação.
Os equipamentos de comunicação utilizados dentro da subestação devem possuir imunidade
a interferências ambientais e eletromagnéticas tal como referido em CEI 61850-3 e IEEE 1613 [5].
Assim, a norma especifica que os equipamentos devem suportar diversos fenómenos como descargas
e interferência com radio frequências. Na presença destes fenómenos os equipamentos não devem
apresentar alterações nas comunicações, erros, atrasos ou interrupções.
Power Line Communication, PLC
A utilização de PLC é uma escolha popular e bastante antiga, pois fornece comunicação a
qualquer local onde existam linhas elétricas, utilizando os condutores para transmitir os sinais, o que
garante cobertura total. Como se utilizam infraestruturas existentes para efetuar a comunicação, os
seus custos são reduzidos quando compara com outras tecnologias. Este sistema opera em canais
estreitos entre 30 e 500 KHz, uma frequência bastante diferente da usada na transmissão de energia.
As desvantagens são a velocidade de transmissão baixa, até 500 kbps, e graves problemas com ruído,
distorção e atenuação do sinal, o que pode resultar em inúmeros erros e degradação do sinal [35].
Outro problema prende-se com o facto de a comunicação ser interrompida por perturbações na linha
elétrica e a desligação da linha faz com que as comunicações não atinjam o destino. Mais recentemente
tem-se desenvolvido BPL (Broadband over Power Lines) com velocidades anunciadas de até 1 Gbps.
Contudo, as restrições físicas tornam improvável serem atingidos ritmos de transmissão superiores a
que alguns Mbps.
Digital Subscriber Loop, DSL
Esta tecnologia transmite informação, de forma económica, usando uma linha telefónica
convencional. O DSL existe em diversas variedades conhecidas como xDSL, onde o ‘x’ determina as
variantes. A mais utilizada é ADSL (Asymmetric DSL), conhecida pela sua utilização no acesso à
Internet. ADSL tem velocidades de download até 24 Mbps e 1 Mbps de upload. A atenuação e
diminuição da relação sinal-ruído afetam largamente o alcance do ADSL, cuja velocidade se reduz a
partir de 6 km. Tem como grande vantagem o seu preço competitivo e a sua disponibilidade alargada.
Fibra ótica
A fibra ótica é um meio de comunicação ideal para o uso em comunicações em sistemas de
energia, pois são imunes a interferências eletromagnéticas e ruído elétrico. Adicionalmente têm um
longo ciclo de vida superior a 20 anos. As suas comunicações são bastante fiáveis, tendo um Bit Error
Rate, BER, de 10-15. A velocidade conseguida pode ser chegar a 100 Gbps para as aplicações
comerciais mais recentes, sendo habitual o uso de ligações de entre 100 Mbps e 10 Gbps em
43
subestações. Em linhas de energia podem utilizar-se dois tipos de infraestruturas, OPGW (Optical
Power Ground Wire) que substitui o cabo de guarda ou ADSS (ALL Dielectric Self-Suporting) que pode
ser aplicado diretamente aos condutores de fase, sendo a primeira opção a mais usual [35].
A sua maior desvantagem é o custo elevado de instalação, especialmente em locais isolados,
onde uma infraestrutura completa seria necessária, não sendo nesse caso económico o uso de fibra
ótica.
Micro-ondas
O uso de transmissão por micro-ondas é feito tradicionalmente em ligações ponto-a-ponto que
necessitam de largura de banda elevada. Estes sistemas são licenciados e operam em múltiplas
bandas de frequência, desde 900 MHz até 38 GHz. A sua largura de banda situa-se entre os 10 e os
155 Mbps e o alcance máximo entre 25 e 60 km [40]. Esta tecnologia necessita de linha de visão entre
os seus transmissores para funcionar corretamente, sendo necessário analisar o caminho de
transmissão para evitar obstruções. Para evitar obstáculos ou expandir a cobertura é possível recorrer
a repetidores de sinal. A sua instalação tem custos elevados, porém pode ser uma escolha benéfica
em áreas onde as comunicações com fios não sejam uma opção.
Satélite
A comunicação por satélite tem como principal vantagem a cobertura geográfica total fornecida
e a capacidade de transportar dados a longas distâncias independentemente das condições. Possui
uma largura de banda razoável com uma velocidade média de download de 1 Mbps e de 256 kbps para
upload. Dada a distância que o sinal tem de percorrer e às características da comunicação existe uma
latência média perto de 600 ms, que em certos casos pode atingir alguns segundos [42]. Apresenta
problemas de segurança pois informações confidenciais podem ser facilmente intercetadas. Apesar de
a sua utilização para a transmissão de mensagens não ser usual, em contexto de SAS usa-se para
efetuar a sincronização temporal dos DEIs com base em GPS.
WiMAX
O WiMAX – Worldwide Interoperability for Microwave Access, é um sistema de comunicações
digitais sem fios, definido pelo standard IEEE 802.16. Para comunicações fixas são utilizadas as bandas
de frequência de 3,5 e 5,8 GHz, sendo o primeiro espetro licenciado e o segundo livre. Para um acesso
ponto-a-ponto é possível comunicar até 50 km de distância com linha de vista, obtendo-se um alcance
inferior para comunicação ponto-a-multiponto [54]. Em comparação, a tecnologia WiFi, utilizada em
redes locais, tem um alcance habitual de até 100 metros. A sua largura de banda atinge 70 Mbps, com
a sua atualização para redes de quarta geração a permitir atingir velocidades teóricas de 1 Gbps.
Contudo, verifica-se que a distância e a velocidade de transmissão são inversamente proporcionais
entre si. Verifica-se ainda que a transmissão em 3,5 GHz permite uma maior potência e distância de
transmissão.
O WiMAX é a única tecnologia estandardizada que permite a criação de uma rede privada sem
fios em larga escala, mesmo em ambientes que tenham limitações quanto à frequência de transmissão.

44
A rede privada tem vantagens relativamente ao controlo e fiabilidade da rede e o facto de ser uma
tecnologia estandardizada facilita o processo de interoperabilidade dos equipamentos. Para melhorar
a transmissão, o WiMAX possui vários tipos de serviços que diferem de acordo com a mensagem
transmitida, nomeadamente na largura de banda utilizada ou na tolerância de latência.
Serviços de operadores móveis
Dos serviços disponíveis pelos diversos operadores móveis destacam-se o GPRS, 3G e mais
recentemente 4G/LTE [54]. Os serviços celulares funcionam nas bandas licenciadas próximas dos 800
MHz e dos 1900 MHz. Estas redes consistem em múltiplas células constituídas, cada uma, por um
transmissor. Estas tecnologias apresentam uma cobertura de território bastante alargada e um custo
reduzido de instalação e de operação. Contudo, a sua utilização implica a contratação de serviços de
terceiros o que pode introduzir problemas de segurança e fiabilidade.
A tecnologia 3G consegue, de forma teórica, atingir velocidades de 2 Mbps, porém diversas
experiências mostram que esse valor é tipicamente mais próximo de 300 kbps. Relativamente ao
GPRS, o seu desempenho é normalmente perto de 40 kbps [29].
Mais recentemente com a introdução de tecnologias de quarta geração como o LTE, a
capacidade e velocidade das redes sem fios aumentou exponencialmente. A simplificação da
arquitetura das redes para sistemas baseados em IP conseguiu uma redução muito significativa da
latência da rede em comparação com redes de terceira geração. A especificação do LTE define uma
velocidade de acesso de até 100 Mbps. Atualmente assiste-se à introdução da evolução desta
tecnologia com a introdução do LTE Advanced, que define uma velocidade de até 1 Gbps.
5.2. Tempo de transmissão de mensagens
O tempo de transmissão de mensagens na rede depende de diversas condicionantes tais como
a topologia da rede, os equipamentos utilizados e o meio de transmissão. Contudo, o tempo de
transmissão não é normalmente determinístico devido a fatores como a carga da rede, que possui
diferentes comportamentos em momentos distintos. Desta forma, é importante determinar quais são os
componentes que constituem o tempo total de transmissão de uma mensagem e distinguir entre os
determinísticos e os não determinísticos.
A latência de uma rede de comunicações define-se como o tempo que a uma mensagem leva
a atravessar a rede, desde o transmissor até ao recetor. Em aplicações críticas, como mensagens
GOOSE, a rede tem de garantir uma certa latência máxima, caso contrário a aplicação pode falhar. As
redes Ethernet possuem diversas fontes de latência, que podem ser divididas nos seus componentes
constantes ou previsíveis e nos variáveis ou imprevisíveis. Todas as latências, com exceção da inerente
às filas e ao tráfego, são determinísticas. Os atrasos constantes são determinados pelas especificações
dos elementos da rede (atraso dos nós) e os atrasos de propagação. A latência variável por outro lado
é geralmente determinada pelo tráfego e congestionamento da rede num dado momento. Apresentam-
se, de seguida, as componentes de latência de um switch [34].

45
Processamento do switch, LSW
Um switch implementa diversas funções, como mecanismos de encaminhamento e
armazenamento de mensagens, gestão de endereços ou implementação de VLANs. A implementação
destas funções introduz um atraso, que no caso dos switches utilizados em SAS, é da ordem de poucos
microssegundos.
Armazenamento e encaminhamento, LSF
No seu funcionamento, um switch armazena os dados recebidos na sua memória interna até
que a frame a transmitir esteja completa. Quando a receção de toda a informação termina, a frame
completa é enviada. Portanto, verifica-se que a latência introduzida é proporcional ao tamanho da frame
transmitida e inversamente proporcional à velocidade de transmissão, ou bit rate, como demonstrado:
𝐿𝑆𝐹 =𝐹𝑆
𝐵𝑅=
300 × 8 𝑏𝑖𝑡
100 × 106 𝑏𝑖𝑡/𝑠= 24 𝜇𝑠 (1)
Onde LSF é a latência de armazenamento e encaminhamento, FS é o tamanho da frame em
bits e BR é a velocidade de transmissão em bit/s. Exemplifica-se o caso de uma frame Ethernet com o
tamanho médio de uma mensagem GOOSE (300 bytes) enviada a 100 Mbps e obtendo-se como
resultado 24 µs.
Transmissão na linha, LWL
O tempo de transmissão na linha refere-se ao atraso da transmissão no canal de comunicação
entre dois dispositivos. Este atraso depende da tecnologia aplicada para transmissão das mensagens.
Na transmissão dentro da subestação, dadas as distâncias reduzidas, a latência introduzida é
desprezável quando comparada com a originada em outras fontes.
Toma-se, como exemplo, a transmissão por fibra ótica a uma distância de 50 km. Sendo a
velocidade de transmissão em fibra ótica cerca de dois terços da velocidade da luz no vácuo (3 x 108
m/s) obtém-se:
𝐿𝑊𝐿 =
50 × 103𝑚
23
× 3 × 108 𝑚/𝑠= 250 𝜇𝑠 (2)
Filas nos switches, LQ
Os switches Ethernet utilizam filas, em conjunto com os mecanismos de armazenamento e
encaminhamento, para eliminar problemas de colisão de frames. Apesar do uso de mecanismos como
priority tagging há ainda problemas quando várias frames com o mesmo nível de prioridade são
enviadas em simultâneo. O uso desta solução introduz um fator não determinístico na latência da rede,
pois é bastante complicado determinar com precisão o padrão de tráfego de uma rede. De igual modo
é difícil o cálculo do pior caso de latência de uma frame, sendo necessário um conhecimento detalhado
de todas as fontes de tráfego da rede. Para efetuar esta análise é necessário conhecer o tamanho da
46
frame transmitida por cada dispositivo, a sua prioridade e distribuição temporal, o que se pode revelar
uma tarefa complexa.
Influência da carga da rede
Os DEIs têm de processar os pacotes que lhes chegam, independentemente de lhe serem
direcionados ou não. Dependendo de como a filtragem do tráfego está implementada, isto pode causar
sobrecarga do processador do DEI, possivelmente conduzindo a uma situação em que este se torna
incapaz de responder a pedidos. Esta condição é conhecida como Denial of Service (DoS), o que pode
levar a que algumas frames sejam descartadas. Para uma rede com uma carga elevada, pode-se
assumir que a probabilidade de uma frame se encontrar numa fila é proporcional à carga da rede.
A utilização dos diversos mecanismos descritos no Capítulo 4 permitem evitar este tipo de
situação e contribuir positivamente para o desempenho da rede, em situações de sobrecarga.
Cálculo de pior caso de latência, LTOTAL
As fontes de latência descritas anteriormente são consideradas separadamente por cada
switch que a frame tem de transpor no seu percurso, desde o emissor até ao recetor. Então, o cálculo
para o pior caso de latência é expresso como:
𝐿𝑇𝑂𝑇𝐴𝐿 = [𝐿𝑆𝐹 + 𝐿𝑆𝑊 + 𝐿𝑊𝐿 + 𝐿𝑄] × 𝑁𝑆𝑊𝐼𝑇𝐶𝐻𝐸𝑆 (3)
O cálculo pode ser simplificado no caso de se admitir que apenas uma fonte de tráfego tem
alta prioridade e a carga da rede é tão reduzida que não ocorrem filas em nenhum switch da rede.
Neste caso, o pior caso de latência na fila deve-se a uma frame de tamanho máximo, FSMAX, em cada
switch do caminho, que não permite que outras sejam enviadas enquanto estiver a ser transmitida.
Cumprindo estas condições, o pior caso de latência é simplificado para:
𝐿𝑇𝑂𝑇𝐴𝐿 = [(
𝐹𝑆
𝐵𝑅) + 𝐿𝑆𝑊 + (
𝐹𝑆𝑀𝐴𝑋
𝐵𝑅)] × 𝑁𝑆𝑊𝐼𝑇𝐶𝐻𝐸𝑆 + 𝐿𝑊𝐿 (𝑡𝑜𝑡𝑎𝑙 ) (4)
Onde FS é o tamanho da frame da prioridade mais alta em bits, BR a velocidade de transmissão
em bit/s e LWL(total) é a latência devido à distância acumulada de ligações entre o transmissor e o recetor.
5.3. Estado da arte relativa a transmissão de mensagens GOOSE
De modo a determinar as latências de diversas tecnologias, em cenário de aplicação em SAS,
consultaram-se diversos estudos. Os estudos apresentados tentam ser abrangentes, tanto nas
tecnologias de comunicação como na forma como são aplicadas, mais concretamente, comunicação
dentro da subestação em bays, entre bays, no bus de estação e de processo, e entre subestações.
Os resultados obtidos são normalmente o atraso end-to-end (ETE), isto é, o tempo entre a
criação da mensagem no DEI emissor e a chegada da mensagem ao DEI recetor e o tempo de ida-e-
volta onde uma mensagem é enviada até ao destino e é devolvida por este ao seu emissor original.

47
Transmissão entre subestações
Em Wen et al. [53] foi testado um esquema especial de proteção que utiliza mensagens
GOOSE numa WAN. Utiliza-se tunneling para comunicação entre as subestações, com 1,544 Mbps de
largura de banda, sendo usado um par de routers que convertem os pacotes a enviar e criam o túnel
entre as subestações.
Os testes realizados têm como diferenças entre si o uso de funcionalidades como priority
tagging, segurança da rede com IPSec, e a carga da rede (nenhuma, leve, pesada). São ainda
analisados três protocolos diferentes: EoMPLS (Ethernet over MPLS) e duas versões L2TP (v2 e v3).
Os resultados apresentados na Tabela 4 demonstram que os requisitos da CEI 61850-90-1
podem ser respeitados para todos os protocolos, com uma carga mínima da rede. Aumentando o
tráfego da rede, os requisitos não são cumpridos.
Tabela 4 - Resultados de tempo de ida e volta (ms) para teste entre subestações [53]
Transmissão dentro de subestação com uso de redes virtuais
Yang et al. [55] analisa o desempenho de uma subestação baseada em CEI 61850. Analisa-se
o desempenho do bus de estação (topologia em estrela) e do bus de processo (topologia em anel
múltiplo) com recurso a redes virtuais.
Na análise do bus de estação utilizam-se cinco redes virtuais, VLAN 1 a 5, cada uma delas
ligada a um switch com uma largura de banda de 50 Mbps. Os cinco switches das VLANs estão ligados
a um switch principal por uma conexão de 500 Mbps. O atraso máximo e médio para cada VLAN está
indicado na Tabela 5. O máximo atraso registado é de 770 µs nas VLANs com maior número de DEIs,
o que satisfaz os requisitos de tempo especificados em CEI 61850-5.
Tabela 5 – Atraso máximo e médio registado para cada VLAN no bus de estação [55]
O bus de processo da subestação suporta uma largura de banda de 500 Mbps. As MU
existentes geram tráfego SMV com um ritmo de 256 amostras/ciclo, distribuindo-o pelos DEIs da sua
VLAN. Na topologia em anel múltiplo, representada na Figura 36, há três segmentos distintos, cada um
com cinco DEIs, que compõem as VLAN 1, 2 e 3. Os resultados da simulação encontram-se na Tabela
Mín. Méd. Máx. Mín. Méd. Máx. Mín. Méd. Máx.Tipo de envio
EoMPLS L2TPv2 L2TPv3
6,25 6,25 6,25 8,33 8,68 10,4 8,338,33 8,33GOOSE (Carga mínima)
8,33
376 8,33 226
8,33 8,33 8,34 8,33 8,33
116 273 8,33 181
8,33
GOOSE (Carga pesada)
GOOSE + QoS (Carga mínima)
GOOSE + QoS (Carga pesada)
760
6,25 20,8 31,2 27 37,1 49,9 8,33 32,3 45,8
8,68 10,4
6,25
VLAN Atraso Máximo (µs) Atraso Médio (µs)
VLAN 1 (6 IEDs) 624 620
VLAN 2 (9 IEDs) 554 528
VLAN 3 (15 IEDs) 770 720
VLAN 4 (15 IEDs) 770 720
VLAN 5 (15 IEDs) 770 720

48
6. Verifica-se que o atraso na VLAN 3 é superior às restantes pois todo o tráfego gerado em simultâneo
é entregue na mesma direção. Isto faz o atraso ser maior cada vez que uma mensagem passa um hop
devido aos atrasos das filas. Os resultados indicam que o atraso verificado nestas condições satisfaz
requisitos de tempo especificados em CEI 61850-5.
Figura 36 - Estrutura da área da linha de transmissão do bus de processo [55]
Tabela 6 - Atraso médio e máximo para a área da linha de transmissão do bus de processo [55]
Transmissão dentro de subestação para topologias diferentes
De acordo com a CEI 61850-5, os requisitos de transmissão de mensagens para num SAS
devem ser garantidos sob quaisquer condições operacionais. A norma propõe um método de cálculo
do tempo de transmissão de mensagens que não considera o funcionamento dinâmico da rede pelo
que é necessário utilizar ferramentas de simulação LAN. Em CEI 61850-5 I.2, o desempenho de uma
rede SAS é estudado com recurso ao programa de simulação COMNET III, sem modelação dos DEIs.
Neste seguimento, Sidhu et al. [47] fez a modelação dos DEIs da rede, utilizando o software OPNET
Modeler, de acordo com os requisitos da CEI 61850, de modo a configurar uma plataforma para o
estudo do desempenho da rede de comunicação da subestação.
Os modelos desenvolvidos representam MUs, disjuntores e DEIs de proteção e controlo (P&C).
A Figura 37 mostra o esquema unifilar da subestação utilizada nos testes. Cada bay assinalada de F1
a F6 na figura possui dois disjuntores, uma MU, dois DEIs P&C e um switch Ethernet. As bays T1, T2
e S1 possuem uma unidade de cada equipamento mencionado. Para limitar o envio das mensagens a
cada bay são utilizadas redes virtuais. A avaliação do desempenho da rede é feita com a análise do
atraso ETE, tendo em conta que se os valores registados forem superiores a 4 ms a performance do
sistema não é aceitável pois viola os requisitos impostos pela CEI 61850.
VLAN Atraso Máximo (µs) Atraso Médio (µs)
VLAN 1 57 15,9
VLAN 2 73 20,5
VLAN 3 97 13,4
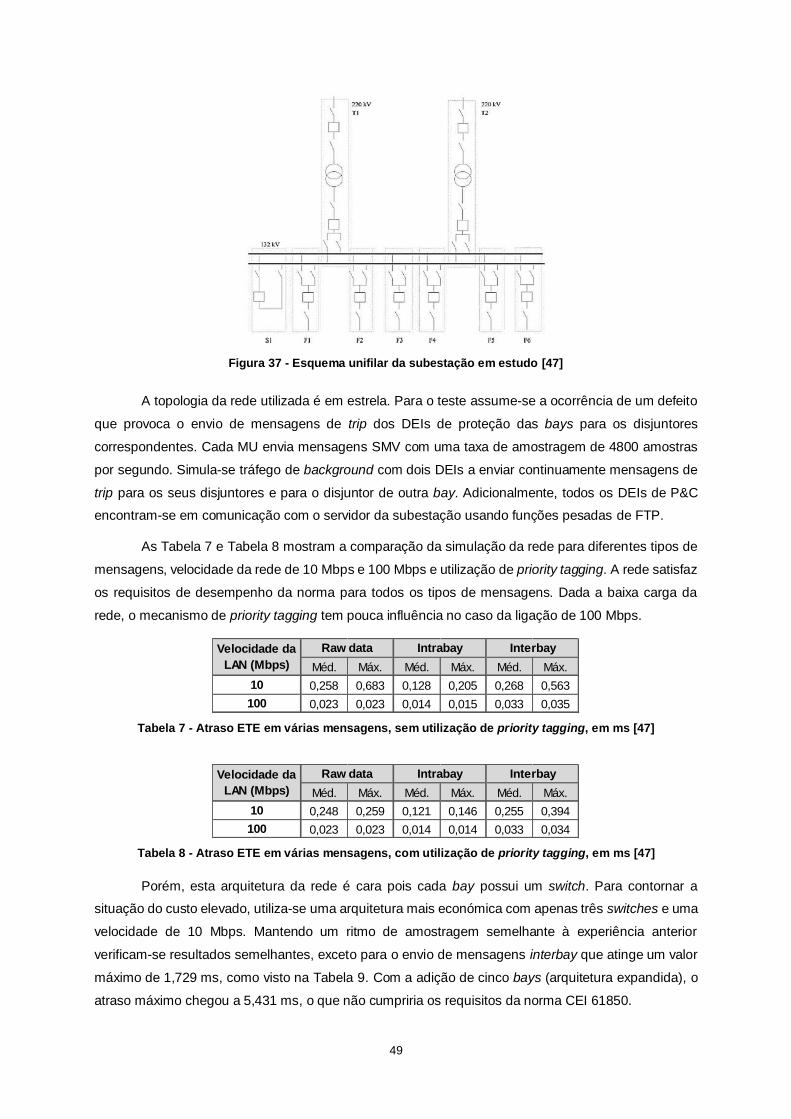
49
Figura 37 - Esquema unifilar da subestação em estudo [47]
A topologia da rede utilizada é em estrela. Para o teste assume-se a ocorrência de um defeito
que provoca o envio de mensagens de trip dos DEIs de proteção das bays para os disjuntores
correspondentes. Cada MU envia mensagens SMV com uma taxa de amostragem de 4800 amostras
por segundo. Simula-se tráfego de background com dois DEIs a enviar continuamente mensagens de
trip para os seus disjuntores e para o disjuntor de outra bay. Adicionalmente, todos os DEIs de P&C
encontram-se em comunicação com o servidor da subestação usando funções pesadas de FTP.
As Tabela 7 e Tabela 8 mostram a comparação da simulação da rede para diferentes tipos de
mensagens, velocidade da rede de 10 Mbps e 100 Mbps e utilização de priority tagging. A rede satisfaz
os requisitos de desempenho da norma para todos os tipos de mensagens. Dada a baixa carga da
rede, o mecanismo de priority tagging tem pouca influência no caso da ligação de 100 Mbps.
Tabela 7 - Atraso ETE em várias mensagens, sem utilização de priority tagging, em ms [47]
Tabela 8 - Atraso ETE em várias mensagens, com utilização de priority tagging, em ms [47]
Porém, esta arquitetura da rede é cara pois cada bay possui um switch. Para contornar a
situação do custo elevado, utiliza-se uma arquitetura mais económica com apenas três switches e uma
velocidade de 10 Mbps. Mantendo um ritmo de amostragem semelhante à experiência anterior
verificam-se resultados semelhantes, exceto para o envio de mensagens interbay que atinge um valor
máximo de 1,729 ms, como visto na Tabela 9. Com a adição de cinco bays (arquitetura expandida), o
atraso máximo chegou a 5,431 ms, o que não cumpriria os requisitos da norma CEI 61850.
Méd. Máx. Méd. Máx. Méd. Máx.
10 0,258 0,683 0,128 0,205 0,268 0,563
100 0,023 0,023 0,014 0,015 0,033 0,035
Velocidade da
LAN (Mbps)
Raw data Intrabay Interbay
Méd. Máx. Méd. Máx. Méd. Máx.
10 0,248 0,259 0,121 0,146 0,255 0,394
100 0,023 0,023 0,014 0,014 0,033 0,034
Velocidade da
LAN (Mbps)
Raw data Intrabay Interbay

50
Tabela 9 - Resultados de atraso ETE para arquitetura mais económica, em ms [47]
Neste teste adicional, simula-se o pior caso para uma topologia de rede em anel, o que
corresponde à situação onde uma mensagem interbay ter de passar nove switches da rede. Os
resultados apresentados na Tabela 10 mostram que o atraso ETE atinge 61,09 ms, no pior caso, o que
é inaceitável. O uso de priority tagging melhora consideravelmente a performance, reduzindo o ETE
para 3,994 ms. Contudo, se a velocidade no anel for melhorada para 100 Mbps e a das sub-redes for
mantida a 10 Mbps, não há problemas com o desempenho da rede, para qualquer um dos tipos de
mensagem.
Tabela 10 - Resultados de atraso ETE para a topologia em anel, em ms [47]
Comunicações sem fios
Este estudo, elaborado por Laverty et. Al [29], apresenta resultados de tempo de ida-e-volta
para diferentes tecnologias que utilizam uma ligação IP como base. As tecnologias testadas foram
ADSL, 3G, GPRS e WiMAX. Neste tipo de telecomunicações, chamadas de “last-mile”, o débito da
ligação depende da força do sinal e da distância à estação base. No caso apresentado, as ligações
ADSL e WiMAX têm um débito mínimo de 512 kbps. Já os serviços celulares têm débitos próximo de
40 kbps e 300 kbps, para GPRS e 3G, respetivamente. Foram testadas ainda duas ligações WiMAX
distintas. A WiMAX (1) é uma ligação ponto a ponto que opera a 60 km da estação base. A WiMAX (2)
é ponto a multiponto, com partilha do canal com 64 subscritores e encontra-se a 30 km de distância.
Para cada uma das tecnologias obteve-se o tempo de ida-e-volta médio, apresentado na
Tabela 11. Admitindo que o atraso de envio de uma mensagem num único sentido é cerca de metade
do tempo de ida-e-volta verifica-se que nenhuma destas tecnologias satisfaz as condições impostas
pela CEI 61850 para o envio de mensagens críticas.
Méd. Máx. Méd. Máx. Méd. Máx. Méd. Máx.
SMV 0,252 0,776 0,242 0,371 0,25 0,588 0,245 0,326
Intrabay 0,127 0,196 0,12 0,15 0,123 0,196 0,127 0,149
Interbay 0,55 1,729 0,262 0,545 0,788 5,431 0,347 0,758
Tipo de
mensagem
Arquitetura económica Arquitetura expandida
Atraso
(Sem Pri. Tag.)
Atraso
(Pri. Tag.)
Atraso
(Sem Pri. Tag.)
Atraso
(Pri. Tag.)
Méd. Máx. Méd. Máx. Méd. Máx.
SMV 0,263 0,826 0,251 0,441 0,247 0,608
Intrabay 0,123 0,195 0,124 0,153 0,129 0,198
Interbay 3,799 61,09 0,931 3,944 0,207 0,375
Tipo de
mensagem
Subrede: 10 Mbps
Anel: 100 Mbps
(Sem Priority Tag.)
10 Mbps
(Sem Priority Tag.)
10 Mbps
(Priority Tagging)

51
Tabela 11 - Tempo de ida e volta para pacotes na rede para as diversas tecnologias [29]
Na Figura 38 mostra-se a distribuição de probabilidade cumulativa para o tempo de ida-e-volta
de pacotes em redes deste tipo, sendo os valores obtidos durante um período de várias semanas, com
60.000 testes por ligação.
Figura 38 – Distribuição de probabilidade cumulativa de tempos de ida-e-volta para as diferentes tecnologias [29]
Os resultados obtidos para a ligação 3G não são fiáveis pois o seu transceiver muda
frequentemente entre os modos 3G e GPRS, dependendo da qualidade da ligação. O teste foi feito em
cenário urbano, sendo espectável pior performance num cenário rural. A ligação WiMAX (2) tem um
atraso excessivo devido ao número elevado de utilizadores da sua rede, enquanto a WiMAX (1) tem a
sua performance comprometida pela grande distância à estação base que a serve. A ligação GPRS é
totalmente inviável sendo que a receção de 100% das mensagens enviadas leva 2 segundos.
Simulação de rede com e sem fios
Kanabar et al. [26] simulou o estudo de comunicação entre uma subestação e um DER
(Distributed Energy Resource) fazendo a modelação da rede e DEIs com OPNET Modeler. A rede da
subestação possui três switches Ethernet para cada uma das bays e um total de catorze DEIs. Por sua
vez o DER possui apenas dois DEIs. Na Figura 39 apresenta-se um esquema simplificado da ligação
genérica entre os dois locais.
A ligação entre as duas localizações foi realizada através de ligações com e sem fios. Na
ligação com fios foram empregues duas tecnologias distintas: fibra ótica a 100 Mbps (3 Km distância)
e cabo de cobre a 10 Mbps (1 Km distância). Na ligação sem fios utilizou-se tecnologia baseada em
Frequency Hopping Spread Spectrum (IEEE 802.11) com alcance até 1 km e velocidade de 1 Mbps e
2 Mbps. Por forma a aumentar o alcance utilizou-se um repetidor de sinal.
Tecnologia Tempo de ida-e-volta típico (ms)
ADSL 42
WiMax (1) 57
WiMax (2) 172
3G 172
GPRS ~ 430

52
Figura 39 - Conceito do sistema de comunicação entre a subestação e o DER [26]
Os resultados da simulação podem ser analisados na Tabela 12, verificando-se como esperado
um menor atraso nas ligações com fios devido à sua maior largura de banda. As ligações sem fios não
cumprem os requisitos da norma CEI 61850 para aplicações de proteção. Verificou-se ainda um maior
atraso na ligação com o repetidor devido ao maior tempo de processamento necessário, sendo que o
aumento da distância de transmissão não é relevante.
Tabela 12 - Atraso de tempo medido para a simulação de comunicação, com e sem fios [26]
Posteriormente utilizaram-se relés comerciais para fazer a transmissão do sinal entre os DEIs
dos dois locais. Os equipamentos utilizados apenas têm a capacidade de enviar sinais a 57,6 ou 115,2
kbps, velocidades mais reduzidas que as utilizadas na simulação. Na Tabela 13 apresentam-se os
resultados obtidos após cinco testes, sendo possível verificar que nenhum dos resultados respeita os
requisitos da norma, o que pode ser explicado pela baixa velocidade de transmissão utilizada na ligação
entre os relés.
Tabela 13 - Atraso de tempo medido para a comunicação, com e sem fios, com o uso de relés [26]
Uso de Internet em proteção
Laverty et al. [28] investigou o uso de Internet como meio de comunicação para aplicações de
proteção. No teste foram usadas ligações com velocidades diferentes e diferentes meios de transporte.
Utilizou-se uma ligação de 1 Gbps (QUB), duas ligações ADSL de 8 Mbps (ADSL (1) – pouco tráfego,
ADSL (2) – muito tráfego) e uma ligação sem fios micro-ondas de 512 kbps (Wireless). Os testes foram
realizados com envio de pacotes entre estas redes, sendo registados os tempos de ida-e-volta dos
10 Mbps 100 Mbps 1 Mbps 2 Mbps 1 Mbps 2 Mbps
(1 km) (3 km) (1 km) (1 km) (2,5 km) (2,5 km)
Atraso médio (ms) 0,06 0,035 4,5 3 7 10
Atraso máximo (ms) 0,07 0,0037 6,1 9 11 18
Ligação sem fios
(repetidor)Atraso medido
Ligação com fios Ligação sem fios
Velocidade de
transmissão (kbps)
Atraso máximo (ms) 10,5 8,5 16,5 12,5 18,5 16,5
Atraso mínimo (ms) 10 8 12,5 10 14,5 14,5
Atraso médio (ms) 10,3 8,1 14,1 10,8 17,1 15,4
Ligação com fios Ligação sem fiosLigação sem fios
(repetidor)
57,6 115,2 57,6 115,2 57,6 115,2

53
pacotes apresentados na Tabela 14. Mais uma vez é possível verificar que o atraso da transmissão
num único sentido irá ser sensivelmente inferior ao tempo de ida-e-volta registado. Desta forma, as
tecnologias testadas não têm a capacidade de cumprir os requisitos impostos pela norma CEI 61850.
Tabela 14 - Resultado de teste de envio de pacotes utilizando Internet [28]
Avaliação do esquema de retransmissão de mensagens GOOSE
Um estudo da ligação entre quatro subestações e dois repetidores foi realizado por Ward et al.
[51], com dois testes que utilizam uma rede Ethernet com transmissão via micro-ondas e fibra ótica,
para concretizar a teleproteção. Na realização do teste foram enviadas 500.000 mensagens, com um
ritmo de cinco mensagens por segundo. O envio de mensagens seguiu o esquema de transmissão de
mensagens GOOSE, pois além da mensagem original, existiram duas repetições.
A análise dos resultados permite concluir que 99,7% dos disparos da proteção foram baseados
na primeira mensagem GOOSE, 0,29% na primeira retransmissão e 0,01% na segunda retransmissão.
Isto permite revelar que o esquema de transmissão de mensagens utilizado é eficaz e permite
salvaguardar a perda de mensagens sem comprometer a proteção.
Análise do desempenho de mensagens GOOSE em WAN com CEI 61850-90-1
Utilizando uma ligação simples, demonstrada na Figura 40, Oliveira e Bowen [36] testaram o
atraso na transmissão de mensagens GOOSE multicast numa WAN, entre dois routers, utilizando uma
ligação ótica. O tunneling das mensagens foi feito com recurso a L2PT, tendo sido efetuados testes
distintos quanto ao tipo de segurança utilizada. Sem o uso de segurança na transmissão, o envio da
mensagem GOOSE num canal 100% carregado de tráfego concorrente, e priorização de mensagens
GOOSE teve um atraso médio de 2,09 ms e máximo de 4,50 ms. Com a utilização de segurança IPsec,
para condições semelhantes de tráfego o atraso foi, em média, de 2,53 ms, com os valores de pico a
não ultrapassarem 6 ms. Estes resultados permitem verificar que a utilização da CEI 61850-90-1, para
envio de mensagens GOOSE em WAN, é possível, dentro dos requisitos temporais descritos.
Figura 40 - Topologia de testes em laboratório [36]
Tecnologia Tempo de ida-e-volta típico (ms)
ADSL (1) → QUB 41,6
ADSL (2) → QUB 59,3
ADSL (1) → ADSL (2) 76,5
Wireless ~ 180
54
Capítulo 6
6. Dimensionamento do Esquema Especial de Proteção
A solução utilizada para a criação do esquema de proteção, que permita a realização de LVRT,
deve ser o mais simples, fiável e barata possível. Primeiramente é necessário definir o esquema
especial de proteção a utilizar, quais as suas necessidades e dificuldades de implementação.
Adicionalmente deve avaliar-se qual o tempo limite para o funcionamento da teleproteção e quais são
as suas componentes. Após analisadas as tecnologias disponíveis, é necessário determinar,
efetivamente, quais as capazes de cumprir os requisitos impostos pela aplicação analisada neste
trabalho, e assegurar um desempenho consistente das suas funções.
6.1. Esquema Especial de Proteção
Um Esquema Especial de Proteção, EEP, é um esquema de proteção empregue como resposta
a uma condição anormal específica de funcionamento ou a uma configuração errada do sistema
elétrico. Assim, este mecanismo de proteção automático apenas é acionado em condições anormais e
pré-determinadas. Os seus objetivos principais são:
⟹ Manter a estabilidade do sistema durante contingências do sistema elétrico;
⟹ Prevenir ou minimizar danos nos equipamentos;
⟹ Minimizar a área afetada e o downtime do sistema;
⟹ Permitir o fluxo contínuo de potência na rede, dentro das capacidades dos equipamentos.
Na rede de MAT ou numa das suas subestações de distribuição, um defeito irá resultar numa
cava de tensão severa, que é propagada à rede de distribuição. Assim, as proteções das instalações
eólicas ligadas à rede de distribuição, com regulações muito sensíveis, irão identificar o defeito,
desligando a instalação da rede. Neste caso, a capacidade de LVRT seria inútil, pois mesmo que os
geradores sejam capazes de atravessar cavas de tensão, as proteções da sua linha de interligação à
rede, irão desconectá-los da rede. Esta situação irá agravar ainda mais a instabilidade da rede,
produzindo um efeito em cascata. Contudo, continua a ser necessário proteger as redes contra os
defeitos locais, o que requer a coordenação das várias proteções instaladas.
O EEP a implementar deve permitir que ao ser detetado um defeito na MAT, além de ser
eliminado através da abertura dos disjuntores nos extremos da linha, a informação relativa à sua origem
deve ser enviada por todas as saídas da subestação até às instalações eólica relevantes. Tal é
aplicável, no caso considerado, para defeitos que ocorram fora da rede local de uma instalação de
produção eólica e em última instância de qualquer outro tipo de produção não despachável. Contudo,
o envio desta informação não tem qualquer valor se as instalações eólicas não forem capazes de
cumprir requisitos de LVRT. Desta forma, é fundamental que todas as novas instalações, e aquelas
que forem atualizadas, sejam dotadas da capacidade de LVRT.

55
Instalações abrangidas pelo EEP
A escolha das instalações, às quais o EEP deve ser aplicado, é um ponto crítico para a
maximização da estabilidade de toda a rede elétrica. A Tabela 15 agrupa as instalações nacionais em
função da sua potência instalada, para o ano de 2013. A partir dos dados da Tabela 15 verifica-se que
existem 112 parques eólicos com potência superior a 10 MW (49% do total), representando 89,4% da
potência eólica instalada.
Tabela 15 - Número de parques eólicos, divididos por níveis de potência, em 2013 [9]
O código da rede de transporte portuguesa especifica que o sistema elétrico nacional não pode
sofrer uma desligação simultânea superior a 2000 MW (~43%) após um defeito severo. Por outro lado,
um estudo realizado pelo IST, em 2004, determinou que desde que 50% da potência instalada de 3800
MW conseguisse atravessar as cavas de tensão na rede de transporte, seria possível garantir a
estabilidade da rede peninsular, em caso de incidente maior [38]. Para a situação atual, não é possível
efetuar uma extrapolação linear, devido às diferentes condições da rede, causadas, entre outros, pelo
aumento na potência eólica instalada. Dada a dificuldade em prever todas as incógnitas existentes na
gestão do sistema, considera-se ser necessário que uma quantidade substancialmente maior de
potência eólica, na ordem dos 80%, seja capaz de atravessar cavas de tensão, para garantir a
estabilidade da rede. Como visto, este valor representa a maior parte das instalações com potência
superior a 10 MW.
Adicionalmente, de acordo com dados da DGEG, indica-se na Tabela 16 a percentagem de
potência instalada que cumpre os requisitos de LVRT, em Portugal. A diferença na potência total
instalada explica-se pela Tabela 15 representar a situação em Dezembro de 2013, enquanto a Tabela
16 se refere a Abril desse mesmo ano.
Tabela 16 – Instalações eólicas que cumprem os requisitos de LVRT, por nível de tensão (Abril de 2013)
2013 % Total 2013 % Total
Total 228 100% 4.630 100%
≤ 1 27 12% 16 0,3%
> 1 ≤ 10 89 39% 474 10,2%
> 10 ≤ 25 70 31% 1.123 24,3%
> 25 ≤ 50 24 11% 825 17,8%
> 50 18 8% 2.195 47,3%
MWNº de Parques Potência (MW)
% Total MW
MAT (130-400 kV) 1.538 78% 1.200
AT (60 kV): ligação a subestação MAT 653 65% 425
AT (60 kV): ligação a subestação AT 1.729 43% 743
MT/BT (≤ 30 kV) 554 21% 116
Nível de TensãoCapacidade de LVRTPotência total
instalada (MW)
56
Desta forma, a instalação do EEP irá considerar apenas as instalações ligadas à rede AT, de
60 kV, ligadas diretamente a um barramento AT de uma subestação da rede de transporte ou a uma
subestação da rede de distribuição. Não são incluídas as poucas instalações ligadas à MT que
possuem uma potência superior a 10 MW, que não representam uma parte significativa da potência
total instalada, e cuja capacidade de LVRT instalada é reduzida. Quanto às instalações eólicas ligadas
à rede MAT, o EEP proposto não é aplicável.
Requisitos de implementação
Antes da implementação do EEP é necessário ter em conta diversos fatores relativos às suas
características, capacidades, tecnologias que lhe servem de base, entre outros.
⟹ Identificação dos requisitos técnicos e funcionais (monitorização do EEP, redundância,
tempos de transmissão, entre outros);
⟹ Identificação dos requisitos técnicos e seleção da tecnologia de comunicação a utilizar para
atingir os requisitos funcionais do EEP.
⟹ Identificação das áreas que requeiram novos desenvolvimentos tecnológicos;
⟹ Simplicidade da solução implementada, flexibilidade e possibilidade de atualização com o
objetivo de garantir futuras expansões do EEP;
⟹ Eficiência de custo da implementação.
Dada a sua natureza crítica, os sistemas de teleproteção devem assegurar operação fail-safe
no evento de um mau funcionamento de qualquer dos componentes do sistema. Como tal, a utilização
de mecanismos que implementem redundância pode ser importante, tal como a utilização de várias
proteções diferentes ou do envio das comunicações por tecnologias diferentes.
No dimensionamento do EEP deve ter-se em conta que as proteções dos geradores das
instalações eólicas e da sua linha de interligação à rede devem, antes de atuar, permitir a atuação do
EEP. Sem o correto dimensionamento destas proteções verifica-se que o desligamento indiscriminado
das instalações eólicas da rede agrava o problema, aumentando o défice de potência e a profundidade
da cava de tensão.
Para todas as instalações eólicas presentes nas redes MT e AT, independentemente de
estarem ou não dotadas da capacidade para atravessar cavas de tensão, serão propostas as
parametrizações para as proteções da sua linha de interligação à rede, que maximizem a continuidade
da sua operação. Estas regulações são aplicadas nos relés localizados na subestação e não os
existentes na instalação eólica, pois a abertura da linha num extremo é suficiente para a desconetar da
rede. As regulações apresentadas partem das recomendações da EDP [10] e são adaptadas tendo por
base as regras técnicas alemãs, irlandesas e francesas, adequando-o às práticas portuguesas.

57
6.2. Requisitos temporais
Relativamente aos requisitos temporais para a transmissão de mensagens dentro da
subestação, Skeie et al. [48] provou que a utilização de Ethernet tem as características de desempenho
suficientes para ser usada num SAS em tempo real. Esta afirmação é suportada pelos resultados das
diversas experiências apresentadas no capítulo anterior e conclui-se que cumpre com facilidade os
requisitos temporais impostos pela norma CEI 61850. Kern et al. [27] provou que o processo de
obtenção de valores nos transformadores de medida e amostragem dos dados nas Merging Units,
relativo a mensagens SMV, atingia um valor máximo de 3 ms, numa rede a 100 Mbps.
Dado que se confirmou que é possível cumprir os requisitos de tempo de mensagens, definidos
em CEI 61850-5, para mensagens dentro da subestação, define-se para os cálculos a utilização do
valor máximo temporal permitido pela norma para cada tipo de mensagem. Estabelece-se assim o pior
caso de funcionamento, onde o sistema continua a respeitar as condições impostas pela norma.
Já para a transmissão de mensagens para lá da subestação verifica-se que os requisitos
descritos em CEI 61850-90-1 para mensagens do Tipo 1A “Trip”, a que correspondem as mensagens
GOOSE, são bastante restritos. Os requisitos TR1 apresentam um tempo de transmissão de
mensagens inferior a 4 ms. Como tal, o número de tecnologias, utilizadas na transmissão de
mensagens, capazes de cumprir os requisitos é muito reduzido. Assim propõe-se o dimensionamento
das tecnologias para a classe TR2, menos restrita, com um atraso para transmissão de mensagens
inferior a 10 ms, e que possibilita alargar o leque de tecnologias disponíveis, cuja utilização cumpre os
requisitos presentes na norma.
Crossley et al. [7] realizou um teste de medição do tempo de abertura do disjuntor após a
deteção de um defeito, identificado por proteções de distância. O tempo médio obtido, desde a deteção
do defeito até à abertura do disjuntor, foi de 20 ms. Este intervalo de tempo é suficiente para o envio
do comando de trip ao disjuntor e para a sua operação.
Para conseguir efetuar com sucesso o objetivo proposto é necessária a transmissão de
mensagens GOOSE não só entre subestações mas também no seu interior, entre DEIs, possivelmente
localizados em bays diferentes, assim como de mensagens SMV. Na Tabela 17 apresenta-se o resumo
do atraso máximo aceitável, na transmissão de diversos tipos de mensagens, cumprindo os requisitos
da norma CEI 61850-90-1.
Tabela 17 - Resumo do tempo máximo de transmissão para os tipos de mensagens utilizados
Tipo de mensagem Tempo máximo de transferência
SMV 4 ms
GOOSE intrabay 4 ms
GOOSE interbay 4 ms
GOOSE intersubestação 10 ms

58
6.3. Modelação do Esquema Especial de Proteção
A definição do caminho de transmissão das mensagens implica que seja necessário determinar
qual é a sequência de eventos, quais os DEIs e, por sua vez, os nós lógicos que intervêm no processo.
Como referido anteriormente, todas as funções realizadas por um sistema baseado em CEI 61850 são
divididas em entidades, denominadas nós lógicos, que comunicam entre si.
Uma grande parte das funções utilizadas possuem uma estrutura vertical, isto é, possui a sua
funcionalidade fundamental no nível de bay e comunicam tanto com o nível de subestação como com
o nível de processo. Os equipamentos primários da subestação como transformadores de corrente
(TCTR), de tensão (TVTR) e disjuntores (XCBR) encontram-se no nível de processo. As proteções
(PTOC, PDIS, PTRC) encontram-se no nível de bay. A interface homem-máquina (IMH) e o controlador
central encontram-se no nível de estação.
Os nós lógicos que realizam funções de proteção situam-se normalmente num único
equipamento. Por norma, existem duas proteções redundantes, que realizam funções semelhantes e
com funcionamento concorrente entre si. Os valores amostrados são obtidos por transformadores de
tensão e de corrente, ou em certos casos por transformadores de medida combinados, existindo um
equipamento por fase.
Um esquema simplificado da bay de uma subestação é apresentado na Figura 41, alocando os
diversos nós lógicos aos equipamentos que lhes dizem respeito. Apresenta-se um painel de
transformador constituído por um seccionador (XSWI), disjuntor (XCBR), transformadores de medida
(TCTR, TVTR) e transformador de potência (YLTC). A proteção redundante é garantida pelos dois
switches e pelas ligações de rede duplicadas a estes. As funções essenciais são também duplicadas,
como as instâncias dos nós lógicos da proteção de sobrecorrente (PTOC) ou dos transformadores de
medida.
Figura 41 - Esquema de nós lógicos dentro de uma bay, com proteção redundante [4]
Seguidamente, apresentam-se os esquemas de nós lógicos, que realizam dois tipos de
proteção distintos, recorrendo a comunicação entre subestações [21].

59
⟹ Proteção de distância, direcional de terra e sobrecorrente
A implementação da proteção de distância requer a inclusão de uma instância do nó lógico
PDIS por cada zona implementada. Ter-se-á então PDIS1 para a zona 1, PDIS2 para a zona 2 e por aí
em diante.
O nó lógico PSCH, cujas propriedades foram estendidas na parte 90-1 da CEI 61850, é utilizado
para comunicação entre funções de proteção e na modelação de esquemas de proteção. As funções
de teleproteção (subalcance e sobrealcance permissivo, bloqueio e desbloqueio), da proteção de
distância e da direcional de terra, estão concentradas nas instâncias de nós lógicos PSCH1 e PSCH2.
Estes nós lógicos controlam a comunicação entre os dois extremos da linha, coordenando o arranque
e a operação das funções de proteção.
Por sua vez, o nó lógico PTRC é utilizado para combinar saídas de trip dos sinais provenientes
de todas as funções de proteção, e após a análise da informação recebida fornece um sinal comum,
que é transmitido ao nó lógico do disjuntor, XCBR, para permitir a sua operação local.
O exemplo da Figura 42 ilustra um esquema de proteção de linha que implementa as funções
de proteção de distância com teleproteção (PDIS + PSCH), proteção direcional de terra com
comparação (PTOC2) e proteção de sobrecorrente (PTOC1), existente nos dois extremos da linha.
Figura 42 - Estrutura horizontal para um esquema de proteção de linha com proteção de distância [21]
⟹ Proteção de corrente diferencial
A proteção diferencial utiliza o nó lógico MDIF, que realiza a comunicação dos valores de
corrente entre os dois extremos da linha. As correntes obtidas pelo transformador de intensidade,
TCTR, são passadas aos nós lógicos MDIF e PDIF como fasores. O nó lógico PDIF efetua o cálculo da
diferença entre a corrente obtida pelo transformador de corrente local (TCTR) e a que lhe é
disponibilizada pelo MDIF, proveniente do extremo oposto da linha. Quando é detetada uma diferença
fora do intervalo predefinido, o nó lógico PDIF transmite a informação a PTRC, que por sua vez dá a
ordem de abertura ao disjuntor.
A Figura 43 ilustra um esquema de proteção diferencial de linha e as relações existentes entre
os nós lógicos que a compõem.

60
Figura 43 - Proteção de corrente diferencial de linha [21]
Sequência de funcionamento do EEP
A realização do EEP proposto implica a atuação de diversos nós lógicos e a troca de informação
dentro da subestação, dentro e entre bays, e fora da subestação. Assim, após a deteção a ocorrência
de um defeito, a sequência de informação entre os nós lógicos é a seguinte:
1 – Os transformadores de medida (TCTR, TVTR) recolhem as amostras de tensão e corrente,
que por sua vez são transmitidas às proteções (PDIS, PTOC, PDIF, etc), através de uma mensagem
SMV dentro da bay.
2 – As proteções recebem os valores amostrados, e fazem a decisão de atuação para eliminar
o defeito (PTRC). Normalmente os diferentes nós lógicos encontram-se no mesmo DEI, pelo que a
troca de informação implica apenas tempo de processamento interno.
3 – Para eliminação do defeito é enviada uma mensagem GOOSE intrabay para o disjuntor do
painel afetado (XCBR).
4 – Simultaneamente à ação anterior, é enviada uma mensagem GOOSE multicast para todos
os endereços contidos na rede virtual do EEP, o que implica o envio de mensagens entre subestações
e possivelmente para os restantes painéis de linha da subestação;
5 – As proteções localizadas na subestação, e afetas à linha de interligação das instalações à
rede, que recebam a informação devem bloquear a sua atuação, de modo a impedir que a cava de
tensão desligue a instalação da rede.
A comunicação dentro da subestação é feita com recurso a switches que interligam todos os
equipamentos. Assim, o envio de uma mensagem SMV dentro de uma bay tem a sequência seguinte.
A Merging Unit, que contém os transformadores de medida, transmite a mensagem ao switch que liga
os equipamentos da sua bay (painel). A mensagem é então reencaminhada pelo switch até ao
equipamento de proteção.
Esta situação ocorre de forma semelhante para o envio de mensagens entre subestações. O
envio da mensagem é feito para o endereço multicast de todos os equipamentos incluídos na rede

61
virtual. Do equipamento de proteção é enviada ao switch da sua bay, que está comunica com o switch
principal da subestação. Este comunica com o router da subestação, que faz o envio da mensagem
para os routers das restantes subestações. Cada um dos routers passa a informação aos switches, que
por sua vez a encaminham ao equipamento de proteção que recebe a mensagem.
6.4. Tempo de transmissão na rede
Como visto anteriormente, de modo a que a capacidade de LVRT possa ser utilizada, na
contribuição para a estabilidade da rede, devem-se dimensionar devidamente as proteções locais.
Assim, estas proteções não devem atuar num tempo inferior ao que a teleproteção demora a chegar
até si. A condição estabelecida permite que, no caso de um curto-circuito na MAT, haja tempo suficiente
para que a teleproteção seja transmitida até à rede local, caso contrário a proteção local atuaria sempre,
ignorando os requisitos do LVRT. No caso da ocorrência de defeitos locais é necessário determinar
qual o tempo máximo que as proteções aguardam pela chegada da teleproteção antes de atuarem,
sem que o sistema seja afetado por essa espera.
O tempo de transmissão da teleproteção é dividido em três componentes diferentes: o tempo de
deteção do defeito, o tempo de envio da mensagem GOOSE com informação da teleproteção e o tempo
referente à atuação de outros equipamentos na subestação. Naturalmente estes tempos encontram-se
também divididos em diversas componentes, algumas delas detalhadas no capítulo 5.2 e em anexo.
Para que o tempo de transmissão se encontre de acordo com as normas utilizadas, e dado que
existem múltiplas tecnologias em análise, utiliza-se como limites temporais indicados no capítulo 6.2.
Como tal, define-se a desigualdade seguinte.
𝑇𝑑𝑒𝑡𝑒çã𝑜
𝑑𝑒𝑓𝑒𝑖𝑡𝑜
+ 𝑇 𝑒𝑛𝑣𝑖𝑜 𝐺𝑂𝑂𝑆𝐸
+ 𝑇𝑜𝑢𝑡𝑟𝑜𝑠 ≤ 𝑇 𝑎𝑐𝑡𝑢𝑎çã𝑜
𝑝𝑟𝑜𝑡.𝑙𝑜𝑐𝑎𝑖𝑠
(5)
𝑇𝑑𝑒𝑡𝑒çã𝑜
𝑑𝑒𝑓𝑒𝑖𝑡𝑜
: Tempo que a proteção demora a detetar o defeito, atuar para o eliminar e a transmitir
a informação da sua ocorrência.
𝑇 𝑒𝑛𝑣𝑖𝑜 𝐺𝑂𝑂𝑆𝐸
: Representa o tempo de transmissão da mensagem GOOSE que transmite a
informação de bloqueia às proteções da rede local da instalação eólica. Pode ser uma
mensagem dentro ou entre subestações.
𝑇𝑜𝑢𝑡𝑟𝑜𝑠 : Tempo de processamento de informação, transferência de mensagens dentro de DEIs
e atuação de outros equipamentos de apoio à transmissão de mensagens.
𝑇 𝑎𝑐𝑡𝑢𝑎çã𝑜
𝑝𝑟𝑜𝑡.𝑙𝑜𝑐𝑎𝑖𝑠
: Tempo que as proteções locais da linha de interligação entre o produtor eólico e a
subestação demoram a atuar, após detetarem condições fora dos limites das suas
regulações.

62
Dado que para o 1º escalão da proteção de distância a deteção do defeito é imediata, o tempo
considerado corresponde à transmissão de uma mensagem SMV entre a Merging Unit e a proteção,
mais o seu tempo interno de processamento. Simultaneamente é feito o envio da mensagem GOOSE
multicast, que transmite a informação de bloqueio às proteções. Assim, a informação é enviada dentro
da subestação e para outras subestações, deste o painel onde o defeito foi detetado, para as bays que
possuem painéis de linha na qual exista geração que necessita de receber a teleproteção.
Para troca de informação entre nós lógicos localizados dentro do mesmo DEI, não é
considerado tempo de transferência, sendo contabilizado apenas o tempo de processamento interno
do DEI que, como visto no capítulo 5.2.1, é da ordem de poucos microssegundos, sendo desprezável
quando comparado com as restantes componentes.
Os casos identificados são apresentados de seguida. Assumiu-se que as proteções locais das
linhas de interligação das instalações eólicas se encontram no painel da subestação que lhes está
atribuído, e que a atuação nestes equipamentos é suficiente para retirar a linha de serviço.
⟹ Instalação eólica ligada a um barramento AT da subestação de Muito Alta Tensão
Nesta situação, após a identificação do defeito pelas proteções, é suficiente o envio de uma
mensagem GOOSE interbay para a proteção da instalação eólica.
𝑇𝑆𝑀𝑉_𝑖𝑛𝑡𝑟𝑎 + 𝑇𝐺𝑂𝑂𝑆𝐸_𝑖𝑛𝑡𝑒𝑟𝑏𝑎𝑦 = 4 + 4 = 8 𝑚𝑠 (6)
⟹ Instalação eólica ligada a uma subestação de Alta Tensão
Esta situação refere-se ao envio da mensagem multicast pela rede para as restantes
subestações. Utilizando os protocolos de tunneling criam-se túneis diretos entre o DEI emissor da
mensagem e o recetor, sendo a mensagem enviada por este meio. Assim, o envio da mensagem
GOOSE de bloqueio da atuação da proteção é de aplicação direta, com recurso a estes mecanismos.
𝑇𝑆𝑀𝑉_𝑖𝑛𝑡𝑟𝑎 + 𝑇𝐺𝑂𝑂𝑆𝐸_𝑖𝑛𝑡𝑒𝑟𝑠𝑢𝑏𝑒𝑠𝑡𝑎çã𝑜 = 4 + 10 = 14 𝑚𝑠 (7)
⟹ Instalação eólica ligada a uma subestação de Alta Tensão com envio de mensagem por
tecnologia sem fios
Este caso é semelhante ao anterior, sendo a única diferença a mudança do meio de
transmissão da mensagem ao longo do seu caminho de transmissão. Tal pode ocorrer por alteração
da tecnologia de comunicação, por exemplo, de fibra ótica para micro-ondas, ou pela existência de um
repetidor de sinal. Para as tecnologias atuais, o tempo de conversão de sinal, entre meios, é cerca de
0,15 ms, para cada conversão [36]. No pior caso, onde existe um repetidor de sinal para uma
comunicação sem fios, é necessário efetuar quatro conversões de sinal.
𝑇𝑆𝑀𝑉_𝑖𝑛𝑡𝑟𝑎 + 𝑇𝐺𝑂𝑂𝑆𝐸_𝑖𝑛𝑡𝑒𝑟𝑠𝑢𝑏𝑒𝑠𝑡𝑎çã𝑜 + 4 × 𝑇𝐶𝑜𝑛𝑣𝑒𝑟𝑠ã𝑜 = 4 + 10 + 4 × 0,15 = 14,6 𝑚𝑠 (8)

63
6.5. Proteções
As redes elétricas, devido à sua grande extensão e exposição, são sujeitas a curto-circuitos
que ocorrem frequentemente na rede de distribuição e, com menor frequência, na rede de transporte.
Como tal, as instalações eólicas ligadas na rede de distribuição são afetadas por cavas de tensão, com
níveis diversos de profundidades, e por norma, com uma duração inferior a um segundo. Na Tabela 18
indicam-se os números típicos de curto-circuitos por ano, por cem quilómetros de linha e a percentagem
de defeitos fase-terra, para diversos níveis de tensão da rede de transporte.
Tabela 18 - Números típicos de curto-circuitos em linhas da rede de distribuição [8]
As cavas de tensão podem resultar de curto-circuitos fase-terra, bifásicos, ou trifásicos. Os
últimos são os mais graves e os menos frequentes (cerca de 5% do total), enquanto os primeiros são
os mais usuais (de 65% a 75%) [8].
No caso de defeitos fase-terra, a deteção em corrente é impossível, o que se deve a não existir
ligação do neutro à terra, em instalações eólicas ligadas na MT ou AT, registando-se porém uma tensão
homopolar apreciável. Isto impede a utilização de proteções que não sejam as de Máximo de Tensão
Homopolar na deteção destes defeitos [8]. Na rede MT o único ponto de ligação do neutro à terra, no
caso de existir, situa-se em cada barramento de MT das subestações.
A proteção diferencial de linha constitui normalmente a proteção principal de linhas de AT. Esta
proteção faz a comparação da corrente nos extremos de uma linha, permitindo a deteção de defeitos.
A proteção de distância, quando existe, pode servir como backup da proteção diferencial,
permitindo detetar defeitos no barramento AT das subestações, que estão numa zona não protegida
pela proteção diferencial de linha. O 1º escalão da proteção destina-se a eliminar defeitos na linha a
que a proteção está associada, enquanto os restantes escalões detetam defeitos localizados nas linhas
a jusante, e servem de backup às proteções dessas linhas.
Na situação de uma rede explorada em malha aberta, o recurso a proteções de distância não
é possível do lado não alimentado pela MAT, dada a baixa potência de curto-circuito das centrais
eólicas. Assim, a deteção de defeitos polifásicos, ocorridos na linha de interligação do parque eólico à
rede, não é normalmente possível com recurso a proteções de distância. Então, a deteção destes curto-
circuitos deve ser feita com base em relés de Mínimo de Tensão direta.
Sendo que a 80-90% dos defeitos ocorridos são de natureza transitória [8],a sua eliminação é
possível com recurso a religação automática, que irá devolver à rede as suas características prévias.
Adicionalmente, a informação relativa ao defeito ocorrido, e ao funcionamento dos diversos
equipamentos, é enviada ao centro de comando da rede. No caso de o mecanismo de religação
automática não repor o serviço, é feita uma única tentativa de reposição por parte do centro de
Nível de tensão 15 kV (MT) 30 kV (MT) 60 kV (AT)
Número de curto-circuitos por ano e por 100 km 30 20 10
Percentagem de defeitos fase-terra 65% 70% 75%

64
comando. No caso de existir um defeito permanente é necessário que haja uma intervenção no local
para corrigir o problema, ficando a linha indisponível.
Em condições normais de operação, a frequência da rede mantém-se praticamente constante,
mas a sua variação é o melhor indício de que a rede elétrica e a instalação de produção se separaram.
Neste caso, devido às especificações técnicas das instalações eólicas pode não ser possível a
adaptação da geração às cargas existentes na ilha. Deste modo, tem interesse que as instalações
tenham conhecimento da sua possibilidade de funcionamento em ilha e atuem de acordo com essa
situação. Como tal, devem utilizar-se proteções de frequência rápidas e precisas.
Adicionalmente, a indisponibilidade operacional devida a avaria do equipamento de controlo ou
proteção da interligação de instalação à rede de distribuição, deve provocar a abertura automática e
imediata do disjuntor de interligação da instalação à rede de distribuição [3].
Por fim, deve incluir-se uma proteção de falha de disjuntor. Se o disjuntor falhar a abertura num
determinado período de tempo após receber a ordem de abertura, o relé envia um comando de trip
externa para os disjuntores nas imediações, que garantam o isolamento do defeito, minimizando os
danos ao sistema. Já a proteção contra defeitos internos à instalação deve ser baseada em proteções
de máxima intensidade.
Proteção de instalações eólicas com capacidade de LVRT
Os requisitos impostos pela curva de LVRT são destinados aos geradores eólicos, e não às
parametrizações das proteções da instalação.
Em situações onde é possível a utilização de proteções de distância, a sua operação em
sobrealcance de 1º escalão possibilitam uma atuação rápida e a eliminação de defeitos polifásicos, que
originam cavas profundas (U<10%), em menos de 150 ms.
De acordo com a curva de LVRT portuguesa [33], os geradores eólicos devem ser capazes de
suportar tensões de 20% durante 0,5 s, e uma tensão linearmente crescente de 20% até 80% entre 0,5
e 1,5 s. Não se requer que sejam suportadas tensões inferiores a 20%. Contudo, tendo em conta que
as cavas de tensão resultantes de defeitos na MAT têm, geralmente, uma tensão inferior a 20% para
t<0,10 s, então a curva de LVRT vigente em Portugal irá dar origem a muitos disparos intempestivos
dos parques eólicos.
Para que as instalações eólicas beneficiem da proposta de regulação das proteções, devem
cumprir os seguintes requisitos:
⟹ Capacidade de atravessamento de cavas com queda de tensão para 0%, por períodos até
0,15 s;
⟹ Capacidade de atravessamento de cavas para t > 0,15 s, de acordo com a curva de LVRT
regulamentar;
⟹ Capacidade de operação com um desvio da frequência nominal de -2,5 Hz a +1,5 Hz, por
períodos iguais ou superiores a 1 segundo.
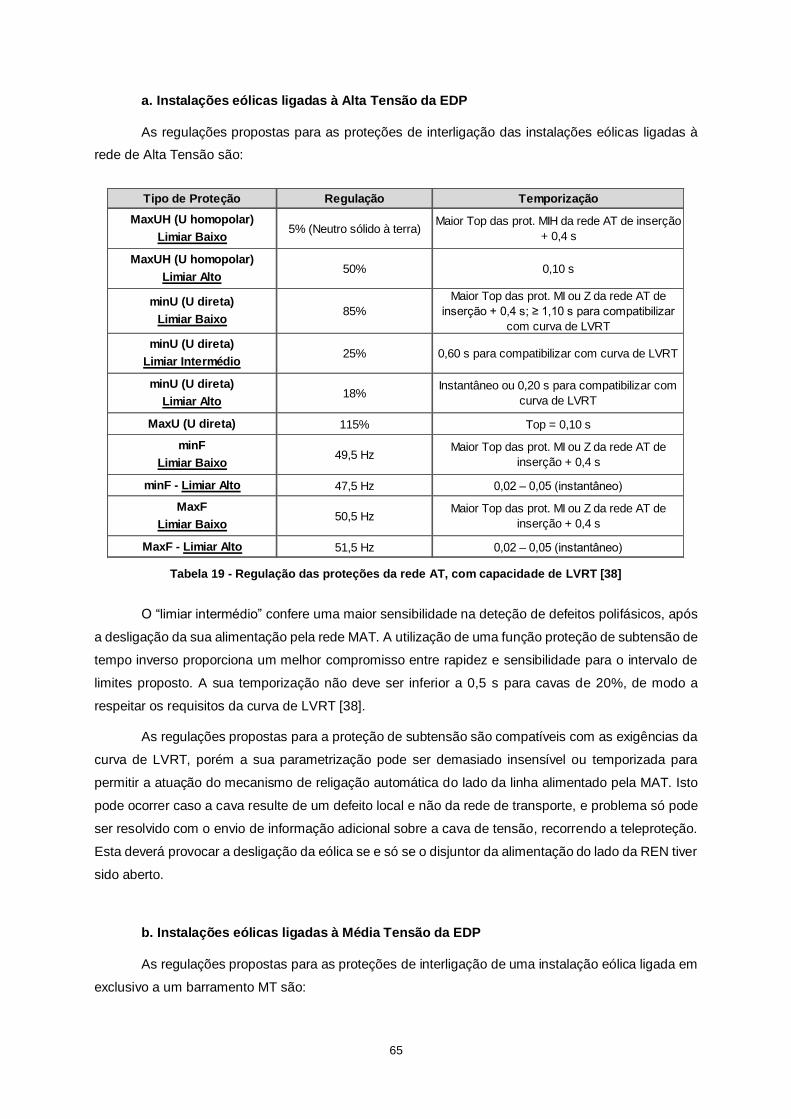
65
a. Instalações eólicas ligadas à Alta Tensão da EDP
As regulações propostas para as proteções de interligação das instalações eólicas ligadas à
rede de Alta Tensão são:
Tabela 19 - Regulação das proteções da rede AT, com capacidade de LVRT [38]
O “limiar intermédio” confere uma maior sensibilidade na deteção de defeitos polifásicos, após
a desligação da sua alimentação pela rede MAT. A utilização de uma função proteção de subtensão de
tempo inverso proporciona um melhor compromisso entre rapidez e sensibilidade para o intervalo de
limites proposto. A sua temporização não deve ser inferior a 0,5 s para cavas de 20%, de modo a
respeitar os requisitos da curva de LVRT [38].
As regulações propostas para a proteção de subtensão são compatíveis com as exigências da
curva de LVRT, porém a sua parametrização pode ser demasiado insensível ou temporizada para
permitir a atuação do mecanismo de religação automática do lado da linha alimentado pela MAT. Isto
pode ocorrer caso a cava resulte de um defeito local e não da rede de transporte, e problema só pode
ser resolvido com o envio de informação adicional sobre a cava de tensão, recorrendo a teleproteção.
Esta deverá provocar a desligação da eólica se e só se o disjuntor da alimentação do lado da REN tiver
sido aberto.
b. Instalações eólicas ligadas à Média Tensão da EDP
As regulações propostas para as proteções de interligação de uma instalação eólica ligada em
exclusivo a um barramento MT são:
Tipo de Proteção Regulação Temporização
MaxUH (U homopolar)
Limiar Baixo
MaxUH (U homopolar)
Limiar Alto
minU (U direta)
Limiar Baixo
minU (U direta)
Limiar Intermédio
minU (U direta)
Limiar Alto
MaxU (U direta) 115% Top = 0,10 s
minF
Limiar Baixo
minF - Limiar Alto 47,5 Hz 0,02 – 0,05 (instantâneo)
MaxF
Limiar Baixo
MaxF - Limiar Alto 51,5 Hz 0,02 – 0,05 (instantâneo)
25% 0,60 s para compatibilizar com curva de LVRT
18%Instantâneo ou 0,20 s para compatibilizar com
curva de LVRT
50,5 HzMaior Top das prot. MI ou Z da rede AT de
inserção + 0,4 s
5% (Neutro sólido à terra)Maior Top das prot. MIH da rede AT de inserção
+ 0,4 s
50% 0,10 s
85%
Maior Top das prot. MI ou Z da rede AT de
inserção + 0,4 s; ≥ 1,10 s para compatibilizar
com curva de LVRT
Maior Top das prot. MI ou Z da rede AT de
inserção + 0,4 s49,5 Hz
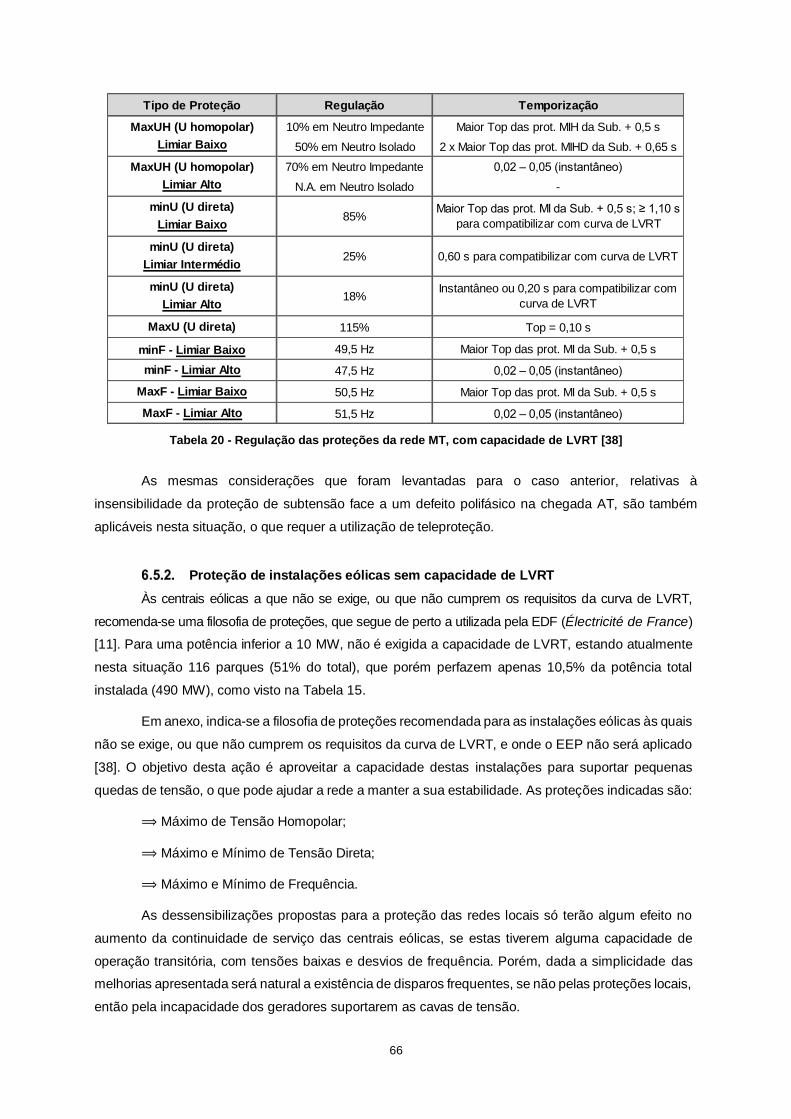
66
Tabela 20 - Regulação das proteções da rede MT, com capacidade de LVRT [38]
As mesmas considerações que foram levantadas para o caso anterior, relativas à
insensibilidade da proteção de subtensão face a um defeito polifásico na chegada AT, são também
aplicáveis nesta situação, o que requer a utilização de teleproteção.
Proteção de instalações eólicas sem capacidade de LVRT
Às centrais eólicas a que não se exige, ou que não cumprem os requisitos da curva de LVRT,
recomenda-se uma filosofia de proteções, que segue de perto a utilizada pela EDF (Électricité de France)
[11]. Para uma potência inferior a 10 MW, não é exigida a capacidade de LVRT, estando atualmente
nesta situação 116 parques (51% do total), que porém perfazem apenas 10,5% da potência total
instalada (490 MW), como visto na Tabela 15.
Em anexo, indica-se a filosofia de proteções recomendada para as instalações eólicas às quais
não se exige, ou que não cumprem os requisitos da curva de LVRT, e onde o EEP não será aplicado
[38]. O objetivo desta ação é aproveitar a capacidade destas instalações para suportar pequenas
quedas de tensão, o que pode ajudar a rede a manter a sua estabilidade. As proteções indicadas são:
⟹ Máximo de Tensão Homopolar;
⟹ Máximo e Mínimo de Tensão Direta;
⟹ Máximo e Mínimo de Frequência.
As dessensibilizações propostas para a proteção das redes locais só terão algum efeito no
aumento da continuidade de serviço das centrais eólicas, se estas tiverem alguma capacidade de
operação transitória, com tensões baixas e desvios de frequência. Porém, dada a simplicidade das
melhorias apresentada será natural a existência de disparos frequentes, se não pelas proteções locais,
então pela incapacidade dos geradores suportarem as cavas de tensão.
Tipo de Proteção Regulação Temporização
MaxUH (U homopolar) 10% em Neutro Impedante Maior Top das prot. MIH da Sub. + 0,5 s
Limiar Baixo 50% em Neutro Isolado 2 x Maior Top das prot. MIHD da Sub. + 0,65 s
MaxUH (U homopolar) 70% em Neutro Impedante 0,02 – 0,05 (instantâneo)
Limiar Alto N.A. em Neutro Isolado -
minU (U direta)
Limiar Baixo
minU (U direta)
Limiar Intermédio
minU (U direta)
Limiar Alto
MaxU (U direta) 115% Top = 0,10 s
minF - Limiar Baixo 49,5 Hz Maior Top das prot. MI da Sub. + 0,5 s
minF - Limiar Alto 47,5 Hz 0,02 – 0,05 (instantâneo)
MaxF - Limiar Baixo 50,5 Hz Maior Top das prot. MI da Sub. + 0,5 s
MaxF - Limiar Alto 51,5 Hz 0,02 – 0,05 (instantâneo)
25% 0,60 s para compatibilizar com curva de LVRT
18%Instantâneo ou 0,20 s para compatibilizar com
curva de LVRT
85%Maior Top das prot. MI da Sub. + 0,5 s; ≥ 1,10 s
para compatibilizar com curva de LVRT

67
Teleproteção
As medidas fundamentais para o sucesso de um sistema de teleproteção são o débito do canal,
a latência e a fiabilidade. O débito do canal define quanta informação é possível enviar de um ponto a
outro, num dado tempo. Devido às recentes necessidades de aplicações em tempo real e
nomeadamente com a implementação da CEI 61850, os requisitos de velocidade aumentaram
significativamente, em comparação aos utilizados há alguns anos atrás.
Dada a sua natureza crítica, os sistemas de teleproteção devem ter as suas operações
salvaguardadas, na eventualidade de um mau funcionamento de qualquer componente do sistema. A
utilização de métodos redundantes como proteção de distância e diferencial de linha, em canais
diferentes, é recorrente. Da mesma forma é também usual a utilização de proteções redundantes,
concorrentes entre si, de fabricantes ou modelos diferentes para salvaguardar eventuais problemas
inerentes ao seu funcionamento.
A teleproteção, ao possibilitar ajustes na rede e eliminação imediata dos defeitos, tem um papel
decisivo para assegurar um fornecimento de energia ininterrupto e portanto requer atenção especial,
relativamente à performance da rede e fiabilidade. O desempenho da teleproteção deve ser sempre
assegurado, dimensionando-a para um funcionamento atempado, antes que as proteções locais
entrem em ação. Assim, o atraso de transmissão deve ter uma variação reduzida e a informação
enviada deve ser confiável, não sendo perdidas mensagens ou evitando atuações erróneas da
proteção.
Os esquemas mais habituais de teleproteção, especificamente para linhas de Alta Tensão,
usam proteção de distância, de corrente diferencial ou uma combinação de ambos. A primeira usa
tipicamente medidas de impedância para atuar nos disjuntores quando o resultado obtido difere daquele
registado em condições normais. A proteção por corrente diferencial efetua a medição da corrente à
entrada e à saída da zona protegida. Se os valores medidos forem distintos em várias amostras
consecutivas, a parte da linha em falha é desligada. Isto requer comunicação entre relés nos dois
extremos da zona. Apresentam-se, de seguida, dois exemplos de situações onde é utilizada
teleproteção [31]:
⟹ Esquema de transferência de desbloqueio permissivo por sobrealcance (POTT)
Na ocorrência de uma falha interna à linha, que ocasione a partida do relé de distância em 2º
escalão e/ou do relé de sobrecorrente de neutro direto, há o envio imediato do sinal de desbloqueio,
para a proteção do extremo oposto. Caso as proteções do extremo oposto, tenham identificado o
defeito, ao receberem o sinal de transferência de desbloqueio, é enviado o sinal de abertura dos
disjuntores locais.
⟹ Esquema de transferência de disparo direto por subalcance (DUTT)
Nesta situação utiliza-se o 1º escalão da proteção de distância, em subalcance, conjuntamente
com proteção de sobrecorrente direcional de neutro inverso. Ocorrendo um defeito na linha, detetado
pela proteção de distância, simultaneamente com a abertura do disjuntor do extremo que deteta o

68
defeito, haverá uma transferência de disparo para o outro extremo da linha. Como tal, o disjuntor desse
extremo terá também abertura imediata, independentemente da atuação das suas próprias proteções.
Nas duas situações descritas, a atuação do relé de sobrecorrente direcional de neutro inverso
previne a atuação incorreta da proteção de distância, para faltas externas à linha, inibindo os sinais das
proteções de distância.
6.6. Implementação
Como a ocorrência de incidentes em redes elétricas é altamente provável, dado o grande
comprimento das linhas e da sua exposição aos elementos, a sua proteção é fundamental. Assim,
sistemas de proteção de linha altamente fiáveis são críticos para a fiabilidade geral de todo o sistema
elétrico. Os sistemas aplicados devem ser capazes de detetar qualquer tipo de falha, e garantir com
grande probabilidade que não atuarão para condições normais, isto é, quando não ocorra uma falha.
Deste modo, a utilização de equipamentos de proteção redundantes é essencial. A proteção
de backup deve ser independente da primária, e se possível utilizar um canal de comunicação,
transformador de medida e alimentação distintos. O uso de equipamentos de fabricantes ou modelos
diferentes deve ser uma obrigatoriedade. Preferencialmente as duas proteções devem funcionar
concorrentemente, o que permite, no caso de a falha de uma delas, assegurar uma rapidez suficiente
para manter a estabilidade do sistema. Na eventualidade de a falha estar restrita a equipamentos com
risco muito pequeno de falha, é aceitável o uso de um único sistema.
Deve garantir-se um funcionamento do EEP resistente à sua falha, isto é, que em caso de mau
funcionamento, a segurança da rede não seja posta em causa. Para tal, é necessário assegurar a
existência de mecanismos que garantam que o sistema elétrico não sofra danos, como proteção de
falha de disjuntor, cão-de-guarda, entre outros. A falha da transmissão da teleproteção implica que o
sinal de bloqueio não chega às proteções locais, pelo que estas irão atuar.
Avaliação das tecnologias
A escolha da tecnologia aplicada depende destes fatores e poderá diferir de acordo com as
características topológicas da rede onde o EEP será implementado. Fatores como o número de
instalações, a sua distribuição geográfica e as infraestruturas pré-existentes influenciam obviamente a
escolha da tecnologia e possivelmente do meio de comunicação. A construção de subestações é, em
muitas situações, feita em locais que estão fracamente servidos de comunicações. Adicionalmente,
estes locais encontram-se a distâncias de dezenas de quilómetros entre si. Logo, o alcance e a
cobertura de território da tecnologia é um fator de escolha decisivo. A tecnologia deve ter suporte e/ou
margem de progressão suficiente, para não ser necessária a sua substituição em curto prazo.
Idealmente a solução deve ser uniforme e assegurar um desempenho consistente em todas as
situações, de modo a poder ser implementada em qualquer instalação, e assim ser possível uma

69
redução dos custos. Adicionalmente, a tecnologia deve ser capaz de lidar com múltiplos tipos de tráfego
e tratá-los de forma diferente, de acordo com os seus requisitos de latência, fiabilidade, entre outros.
Uma questão central prende-se com a utilização de comunicações próprias ou de terceiros. O
uso de comunicações próprias tem como vantagem um maior controlo e segurança dos dados, assim
como um melhor dimensionamento das soluções a utilizar. Porém, esta opção é muito dispendiosa,
devido à necessidade de instalação de um grande número de infraestruturas para comunicação. Por
outro lado, a utilização de comunicações de terceiros pressupõe a utilização de uma infraestrutura pré-
existente, alugando-se a utilização de uma certa largura de banda para os serviços necessários. Esta
opção pode implicar problemas de segurança para a rede. Em adição, a velocidade de acesso pode
ser muito variável com o tráfego da rede, que se altera com a utilização da ligação por outros
utilizadores, não sendo a velocidade da rede determinística. Tal, pode implicar que a comunicação
tenha um atraso excessivo, e que a teleproteção seja comprometida.
Sendo que a larga maioria dos estudos identificados não tinha como objetivo o estudo da CEI
61850-90-1, são feitas suposições e adaptações dos dados obtidos, para um cenário onde esta norma
seria utilizada. Assim, é possível obter conclusões relativas ao atraso de transmissão de mensagens
GOOSE, utilizando diversas tecnologias.
Como mencionado anteriormente, é considerado como requisito temporal para o envio de
mensagens GOOSE, entre subestações, um tempo inferior a 10 ms. Esta escolha, em vez dos mais
restritos 4 ms, deve-se à possibilidade de escolha entre um número superior de tecnologias, que de
outra forma não cumpririam os requisitos da norma. A alteração não terá um impacto negativo no EEP,
bastando garantir uma correta seletividade entre o EEP e as proteções locais das instalações.
Confirmou-se ainda que a transmissão de mensagens dentro da subestação cumpre com facilidade o
requisito temporal definido de 4 ms, recorrendo a uma ligação Ethernet típica.
Da análise das tecnologias identificadas no capítulo 5.1, compilou-se a Tabela 21, sendo que
as características referidas são definidas da seguinte forma:
⟹ Cobertura: capacidade de utilizar infraestruturas pré-existentes, próprias ou de terceiros,
para suportar o EEP.
⟹ Requisitos: capacidade de cumprimento dos requisitos temporais relativos ao atraso de
transmissão, indicados pela norma CEI 61850-90-1, para o envio de mensagens GOOSE em WAN.
⟹ Custo: custo relativo de implementação do EEP e construção das infraestruturas
necessárias, tendo por base a tecnologia indicada.
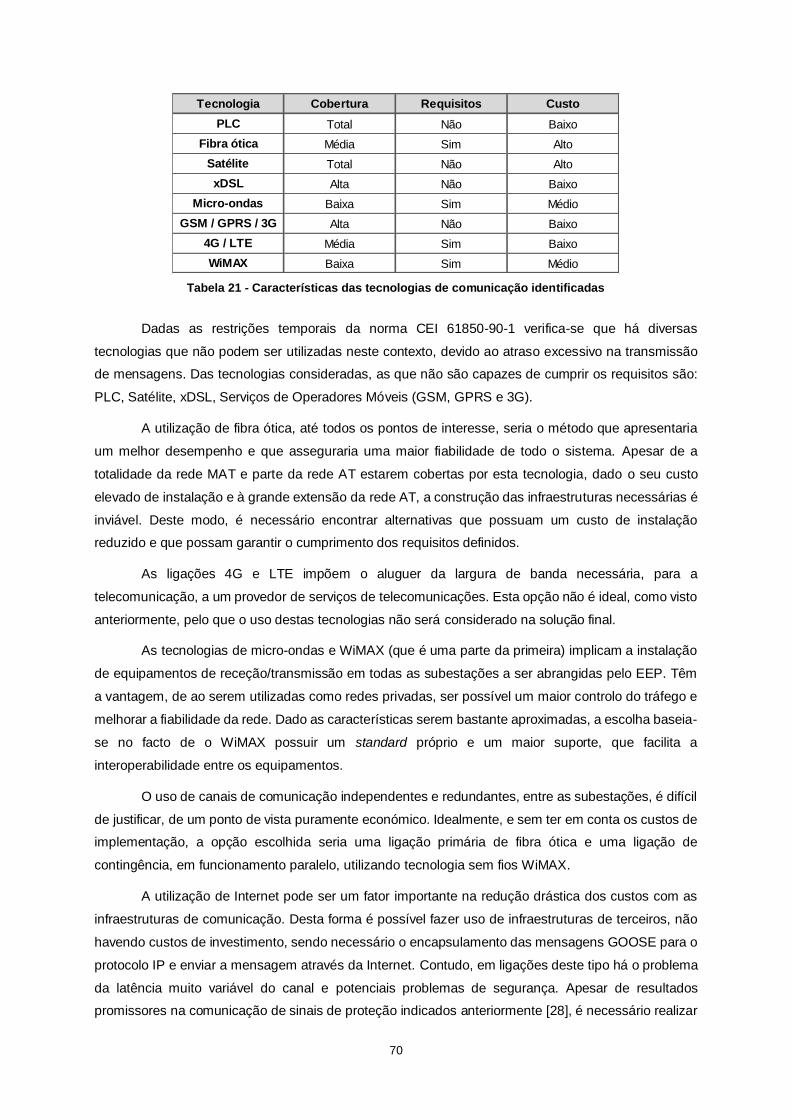
70
Tabela 21 - Características das tecnologias de comunicação identificadas
Dadas as restrições temporais da norma CEI 61850-90-1 verifica-se que há diversas
tecnologias que não podem ser utilizadas neste contexto, devido ao atraso excessivo na transmissão
de mensagens. Das tecnologias consideradas, as que não são capazes de cumprir os requisitos são:
PLC, Satélite, xDSL, Serviços de Operadores Móveis (GSM, GPRS e 3G).
A utilização de fibra ótica, até todos os pontos de interesse, seria o método que apresentaria
um melhor desempenho e que asseguraria uma maior fiabilidade de todo o sistema. Apesar de a
totalidade da rede MAT e parte da rede AT estarem cobertas por esta tecnologia, dado o seu custo
elevado de instalação e à grande extensão da rede AT, a construção das infraestruturas necessárias é
inviável. Deste modo, é necessário encontrar alternativas que possuam um custo de instalação
reduzido e que possam garantir o cumprimento dos requisitos definidos.
As ligações 4G e LTE impõem o aluguer da largura de banda necessária, para a
telecomunicação, a um provedor de serviços de telecomunicações. Esta opção não é ideal, como visto
anteriormente, pelo que o uso destas tecnologias não será considerado na solução final.
As tecnologias de micro-ondas e WiMAX (que é uma parte da primeira) implicam a instalação
de equipamentos de receção/transmissão em todas as subestações a ser abrangidas pelo EEP. Têm
a vantagem, de ao serem utilizadas como redes privadas, ser possível um maior controlo do tráfego e
melhorar a fiabilidade da rede. Dado as características serem bastante aproximadas, a escolha baseia-
se no facto de o WiMAX possuir um standard próprio e um maior suporte, que facilita a
interoperabilidade entre os equipamentos.
O uso de canais de comunicação independentes e redundantes, entre as subestações, é difícil
de justificar, de um ponto de vista puramente económico. Idealmente, e sem ter em conta os custos de
implementação, a opção escolhida seria uma ligação primária de fibra ótica e uma ligação de
contingência, em funcionamento paralelo, utilizando tecnologia sem fios WiMAX.
A utilização de Internet pode ser um fator importante na redução drástica dos custos com as
infraestruturas de comunicação. Desta forma é possível fazer uso de infraestruturas de terceiros, não
havendo custos de investimento, sendo necessário o encapsulamento das mensagens GOOSE para o
protocolo IP e enviar a mensagem através da Internet. Contudo, em ligações deste tipo há o problema
da latência muito variável do canal e potenciais problemas de segurança. Apesar de resultados
promissores na comunicação de sinais de proteção indicados anteriormente [28], é necessário realizar
Tecnologia Cobertura Requisitos Custo
PLC Total Não Baixo
Fibra ótica Média Sim Alto
Satélite Total Não Alto
xDSL Alta Não Baixo
Micro-ondas Baixa Sim Médio
GSM / GPRS / 3G Alta Não Baixo
4G / LTE Média Sim Baixo
WiMAX Baixa Sim Médio

71
estudos mais aprofundados, relativos ao atraso e fiabilidade de transmissão de mensagens GOOSE
utilizando a norma CEI 61850-90-1, pois as velocidades de acesso estão em evolução constante.
Os operadores de redes de transmissão têm por norma instalada uma rede SDH, síncrona, que
envia de frames de tamanho fixo, através de fibra ótica. Estas redes são muito fiáveis e determinísticas
para aplicações críticas, e fáceis de operar e manter. Contudo, não são adequadas para o envio de
mensagens de acordo com a norma CEI 61850, pelo que é necessário uma evolução e um
distanciamento destas redes.
Analisando as opções possíveis, descritas em anexo, para a criação do túnel com o objetivo
de enviar mensagens na WAN verifica-se que os mecanismos mais viáveis são o MPLS-TP e o PBB-
TE. Adicionalmente, verifica-se que vários operadores da rede elétrica possuem redes, além de SDH,
baseada em tecnologia IP/MPLS. Contudo, esta opção não tem as características ideias para o uso
com aplicações críticas. O encapsulamento de mensagens para o seu envio por um túnel introduz um
muito baixo, entre 8 e 25 µs, independentemente do cabeçalho ser IP, Ethernet ou outro [36].
Dadas as características de desempenho entre o MPLS-TP e o PBB-TE serem semelhantes,
os fatores diferenciadores para a escolha irão ser outros. Em termos de custo, a opção recai na
utilização de PBB-TE dados os seus custos iniciais e operacionais serem até 40% inferiores aos do
MPLS-TE. Outro fator importante à sua possibilidade de utilização de múltiplas tecnologias como rede
de acesso, o que aumenta a sua versatilidade. O facto de esta tecnologia estar normalizada em IEEE
802.1Qay, permite um grande suporte e garantias de interoperabilidade.
Opção final
Como já referido, o EEP permite a distinção entre cavas de tensão resultantes de defeitos na
rede MAT e na rede local. A partir da análise efetuada, considera-se que o esquema proposto apenas
será implementado em instalações capazes de suportar os requisitos de LVRT, ligadas à rede AT e
com potência instalada superior a 10 MW.
Para a possibilidade de cumprir o envio da teleproteção até às proteções das instalações
eólicas, bloqueando o seu funcionamento, e deste modo garantindo que se mantêm ligadas à rede
durante uma cava de tensão, é necessário o correto dimensionamento do EEP. A criação de uma rede
virtual na WAN, que abrange apenas os equipamentos que participam nas funções do EEP é uma
opção a tomar. Assim, os túneis para o envio de mensagens GOOSE irão ser formados entre estes
equipamentos, permitindo uma comunicação direta, rápida e de processos simples.
O dimensionamento do EEP contemplou a indicação de parte dos nós lógicos utilizados no
funcionamento do EEP, a verificação dos requisitos temporais no envio de mensagens, o cálculo do
tempo de transmissão na rede e uma proposta de regulações para as proteções das redes locais das
instalações eólicas. Por fim, indicam-se as características do EEP, de forma resumida:
⟹ Tecnologia: fibra ótica atualmente instalada na rede MAT e em parte da rede AT,
complementada com um acesso terminal por WiMAX.

72
⟹ Protocolo de Tunneling: idealmente PBB-TE, que pode ser utilizado para criar um túnel
tanto através da ligação por fibra ótica como pela ligação WiMAX.
⟹ Outros mecanismos utilizados:
● Criação de uma rede virtual com a inclusão apenas dos equipamentos utilizados na
comunicação das informações utilizadas pelo EEP;
● Gestão de multicast com recurso a VLAN para separação de tráfego entre bays
(painéis) da subestação;
● Sincronização temporal por GPS com precisão melhor que 50 µs;
● Priorização de mensagens GOOSE referentes a proteção, relativamente às restantes
mensagens da rede;
● Utilização do mecanismo de retransmissão de mensagens GOOSE, em rajada, com
envio de um mínimo de três mensagens idênticas;
● Utilização de topologia de rede de grande redundância e protocolos de redundância
com tempo de recuperação de rede nulo, como PRP e HSR;
● Encriptação apenas para mensagens enviadas entre subestações, não o fazendo
para mensagens dentro de subestações.
Aproveitando as capacidades das tecnologias, além da implementação do EEP proposto, a
infraestrutura pode ser aproveitada para outras aplicações, adicionando e melhorando outras
características da rede. Uma opção interessante é o aumento da Wide Area Awareness, que possibilita
monitorizar a rede elétrica de forma bastante detalhada, com recurso a sensores distribuídos por toda
a rede. A monitorização mais próxima da rede contribui fortemente para a mitigação de riscos, melhor
fiabilidade e restauro após falhas. A informação recolhida é benéfica para realizar análise de
contingências e melhorar previsões de carga da rede e em aplicações como prevenção de
insularização, controlo flutuações de frequência, entre outros. As comunicações instaladas seriam um
meio ideal para a recolha de dados de smart metering, cuja utilização se encontra em desenvolvimento
e implementação acelerada no nosso país.
Uma recomendação importante relativamente aos parques que não possuem LVRT é a sua
gestão mais eficaz. Deve investigar-se a sua potência de curto-circuito, a viabilidade dos balanços de
potência e verificar quando os excedentes da geração não podem ser integrados no sistema. Em
situações excecionais, deve existir a possibilidade de enviar ordens para a limitação da geração, que
permita a máxima integração possível da energia eólica com a operação segura e estável do sistema.
73
Capítulo 7
7. Conclusões
7.1. Considerações finais
A instalação de um grande número de parques eólicos, ocorrida desde o início milénio, teve
um grande impacto em todo o sistema elétrico. Não só grande parte da potência instalada deixou de
ser despachável, como foram introduzidos problemas para a estabilidade da rede, derivados das
características das instalações eólicas.
O estudo da rede espanhola indica que cavas de tensão originadas por defeitos trifásicos em
certas subestações de 400 kV podem afetar a maior parte do sistema elétrico. Apesar de esta situação
não ser usual, é possível que, num dia em que a produção eólica seja uma parte significativa do total,
a ocorrência de um defeito na rede MAT, provoque a desligação em cascata dos parques eólicos
causando um apagão peninsular, dado que uma parte significativa das instalações não cumpre os
requisitos impostos pela curva de LVRT.
O objetivo da capacidade de LVRT é contribuir para a estabilidade da rede, em caso de curto-
circuito na rede MAT, não sendo um atributo que deve ser cumprido sempre. Então, a filosofia de
proteção da linha de interligação das instalações eólicas à rede tem de ser compatível com o
atravessamento das cavas de tensão resultantes de defeitos na rede MAT. Sem esta compatibilização,
a capacidade de LVRT revela-se inútil. Por outro lado, a proteção da rede face a defeitos locais não
pode ser desprezada. Identificou-se que os requisitos de LVRT e a proteção das redes locais das
centrais não são compatíveis entre si sem a utilização de mecanismos auxiliares.
O EEP a implementar deve permitir a resolução deste problema, o que implica o envio de
informação relativa à origem do defeito, para que as proteções locais não desliguem a instalação da
rede, quando o defeito ocorreu na MAT. O envio desta informação requer a utilização de
telecomunicações rápidas recorrendo à norma CEI 61850-90-1, especialmente direcionada para a
comunicação entre subestações. Esta norma define os requisitos para a transmissão de mensagens e
diferentes use cases, não indicando porém quais as tecnologias a utilizar. O tempo de atraso para o
envio de mensagens requerido pela norma é muito apertado, sendo de 4 ms e 10 ms, para mensagens
dentro e entre subestações, respetivamente. O atraso variável é uma grande ameaça à teleproteção,
devido ao grande nível de incerteza que introduz e por isso tem de ser lidado com gestão avançada de
tráfego. Assim, para contribuir para a rapidez do envio de mensagens, analisaram-se múltiplos
mecanismos como: gestão de multicast, uso de redes virtuais, priorização de tráfego, entre outros.
As mensagens GOOSE, que transportam a informação pretendida, não foram desenvolvidas
para transmissão em WAN. Assim, é necessário recorrer ao tunneling, que consiste no encapsulamento
da mensagem para um outro protocolo, para a sua transmissão.
A necessidade de conhecer o atraso de transmissão de mensagens GOOSE, dentro e entre
subestações, para tecnologias e situações distintas, conduziu à pesquisa de múltiplos estudos já

74
realizados nesse sentido. No capítulo 5.3 apresentam-se esses estudos, as tecnologias utilizadas e os
resultados obtidos, que auxiliaram a escolha da tecnologia a aplicar no EEP. Porém, verifica-se que o
estado da arte acerca da transmissão de mensagens utilizando a norma considerada é praticamente
inexistente. Esta situação implica que os resultados de transmissão de mensagens GOOSE em WAN,
nos casos identificados, não tenham uma correspondência exata, havendo necessidade de fazer
suposições relativas ao atraso no envio destas mensagens. Assim, refere-se a necessidade de
investigação mais aprofundada nesta vertente.
A implementação do EEP será restringida a instalações eólicas com potência superior a 10
MW, ligadas à rede de Alta Tensão. Concluiu-se que o atraso no envio da mensagem de teleproteção
do EEP, é inferior ao tempo de atuação das proteções locais propostas, e que se encontram adaptadas
à curva portuguesa de LVRT. Para as restantes instalações, que devido à sua baixa potência não
cumprem os requisitos de LVRT apresentaram-se novas parametrizações para as suas proteções
locais, que possam ajudar à estabilidade da rede.
A opção da tecnologia escolhida para concretizar o EEP passa por uma junção de tecnologias.
A utilização de fibra ótica deve ser o principal meio de transmissão e será utilizada onde for possível.
Nos restantes locais requer-se a instalação de transmissores WiMAX para a comunicação sem fios e
equipamentos capazes da conversão de sinais entre as duas tecnologias. Assim, o operador da rede é
capaz de controlar todo o tráfego crítico das ligações. Esta solução não apresenta custos de
infraestruturas a nível da rede MAT, que possui comunicação por fibra ótica instalada em toda a rede.
Por sua vez, a rede AT possui já alguma fibra ótica instalada, sendo necessário fazer o levantamento
da cobertura. Os operadores da rede de distribuição, que por normal possuem uma cobertura mínima
das suas redes, atravessam atualmente uma mudança de paradigma que os desafia a ponderar a
instalação de comunicações, para acompanhar a evolução das redes e os requisitos mais recentes.
Esta rede de comunicações, além da aplicação discutida neste trabalho, poderia ser aproveitada para
outras aplicações de gestão da rede elétrica, pensando já numa possível evolução das redes atuais
para smart grids.
Adicionalmente deve existir um maior controlo sobre a produção dos parques eólicos,
nomeadamente a possibilidade de envio de instruções de modificação do fator de potência e por
conseguinte controlo de reativa nos geradores que é benéfica no controlo de tensões e para apoiar a
rede, com a sua injeção, durante curto-circuitos.
Este trabalho teve como objetivo ser um ponto de partida, para o desenvolvimento e posterior
adoção de uma implementação semelhante à proposta, em todos os países cuja produção eólica sejam
uma parte significativa da sua produção total.
7.2. Direções de investigação
A rede portuguesa, devido às suas características tem a oportunidade de ser pioneira e liderar
o esforço de aplicação desta norma, a nível mundial. Sendo este um trabalho inovador, do qual não
são encontradas referências nacionais ou internacionais, carece ainda de investigação e da criação de

75
modelos específicos para a sua a implementação. Dada a sua originalidade e o foco especial na CEI
61860-90-1, há a possibilidade de ser uma referência no contexto global e assim servir de base para
toda uma nova tendência em sistemas de energia.
Presentemente, verifica-se que não há suporte, por parte da norma CEI 61850, para a
comunicação GOOSE na camada 3 do modelo OSI, para efetuar teleproteção. Adicionalmente, um
grande impulso ao sucesso desta aplicação seria a definição de perfis para o envio de mensagens
GOOSE e SMV através de redes IP.
Para poder avaliar a atuação do EEP proposto devem ser efetuados testes que comprovem a
sua fiabilidade. Inicialmente deve testar-se um modelo em ambiente laboratorial, utilizando ferramentas
de modelação de nós lógicos como OPNET Modeler ou OMNeTT++, que permitem simular as
características do EEP. Seguidamente, e após validação dos resultados, o passo seguinte é a
realização de um teste piloto em campo, entre duas subestações, com ligações concorrentes entre si
usando fibra ótica e uma ligação sem fios LTE ou WiMAX. Os testes têm como objetivo avaliar a
capacidade da implementação cumprir os requisitos temporais da norma, e verificar o desempenho,
resiliência e confiabilidade da rede. Na realização dos testes deve garantir-se a sincronização temporal
dos DEIs, preferencialmente recorrendo a GPS (IEEE 1588) e utilizar-se um software de captura de
pacotes, como o Wireshark, que calcule o tempo de transmissão de forma fiável. Os testes devem
avaliar o desempenho da rede nos seguintes pontos:
⟹ Atraso máximo de transmissão de mensagens GOOSE, dentro e entre subestações;
⟹ Avaliação das perdas de mensagens durante a transmissão;
⟹ Tempo de recuperação da rede após falha, usando PRP ou HSR.
Adicionalmente, e dado os defeitos ocorridos na MAT terem, em regra, tensões inferiores a
20% da nominal para t<0,10 s, verifica-se que a curva de LVRT atualmente vigente em Portugal, não é
adequada. Mesmo com as alterações propostas neste trabalho, esta situação irá provocar muitos
disparos intempestivos às instalações eólicas. Assim, existe a necessidade de legislar uma curva de
LVRT mais adequada à realidade, que preveja tensão zero durante os primeiros 0,15 s. Seguindo o
exemplo de outros países, é também de interesse apresentar curvas de LVRT distintas para a rede de
distribuição e de transporte, que se adaptem às diferentes exigências de cada rede. Nos casos de
geradores eólicos que não cumprem os requisitos impostos, propõe-se a adoção de uma curva de
LVRT menos restrita, que se adapte à capacidade reduzida destas instalações suportarem cavas de
tensão, e que permita a sua desligação da rede por curtos períodos (Short Term Interruption – STI).

76
8. Referências bibliográficas
[1] Alcatel Lucent, “Deploying IP/MPLS Communications Networks for Smart Grids”, Application Note,
2010
[2] “Anatomy of an Ethernet Frame”, Acedido em:
https://communities.netapp.com/blogs/ethernetstorageguy/2009/09/12/anatomy-of-an-ethernet-
frame, a 11 de Julho de 2014
[3] Andersson, L., Brunner, C., Engler, F., “Substation Automation based on IEC 61850 with new
process-close Technologies”, ABB Switzerland Ltd.
[4] Brand, K., P., Brunner, C., Wimmer, W., "Design of IEC 61850 based Substation Automation Systems
according to customer requirements", Cigré, Paris, paper 195-04, 2004
[5] Chen, A., “Requirements for Ethernet Networks in Substation Automation”, Moxa White Paper,
Janeiro de 2008
[6] Cigré, “Communication Architecture for IP-based Substation Applications”, Cigré Working Group
D2.28, Agosto de 2012
[7] Crossley P., et al., “Design and performance evaluation for a protection system utilising IEC 61850-
9-2 process bus”, The International Conference on Advanced Power System Automation and
Protection, IEEE, 2011
[8] DGE, “Guia de aplicação das condições técnicas de ligação às redes de distribuição das instalações
de produção de energia eléctrica em regime especial”, Direcção-Geral de Energia, Direcção de
Serviços de Energia Eléctrica, Dezembro de 2002
[9] DGEG, "Renováveis - Estatísticas rápidas Nº106", Direcção Geral de Energia e Geologia, Dezembro
de 2013
[10] EDP, “Instalações AT e MT. Subestações de distribuição, Sistemas de Protecção, Comando e
Controlo Numérico (SPCC) - Funções de protecção, Especificação funcional”, 2007
[11] ERDF, “Étude de la protection de découplage pour le raccordement d’une production décentralisée
en HTA”, ERDF - Élecricité Réseau Distribution France, 2011
[12] EWEA, “Wind in power, 2012 European statistics”, EWEA - The European Wind Energy
Association, Fevereiro de 2013
[13] Goraj. M., “IEC 61850 Network Architectures”, RuggedCom Industrial Strength Networks, Julho de
2010
[14] Gupta, R. P., “Substation Automation Using IEC61850 Standard”, IEEE, Fifteenth National Power
Systems Conference (NPSC), IIT Bombay, Dezembro de 2008
77
[15] GWEC, “Global Wind Statistics 2013”, GWEC – Global Wind Energy Council, 5 de Fevereiro de
2014
[16] IEEE, “IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement
and Control Systems”, Julho de 2008
[17] IEEE PSRC, “Application Considerations of IEC 61850/UCA 2 for Substation Ethernet Local Area
Network Communication for Protection and Control”, IEEE PSRC H6: Special Report, 2005
[18] IEC TC 57, “IEC 61850-6: Communication networks and systems in substations - Part 1:
Introduction and overview”, First Edition, 2003
[19] IEC TC 57, “IEC 61850-7-1: Communication networks and systems in substations – Part 7-1: Basic
communication structure for substation and feeder equipment – Principles and models”, 2003
[20] IEC TC 57, “IEC 61850-7-2: Communication networks and systems in substations – Part 9-1:
Specific Communication Service Mapping (SCSM) – Sampled values over serial unidirectional
multidrop point to point link”, 2003
[21] IEC TC 57, “IEC 61850-7-4: Communication networks and systems in substations – Part 7-4: Basic
communication structure for substation and feeder equipment – Compatible logical node classes
and data classes”, First edition, Maio de 2003
[22] IEC TC 57, “IEC 61850-8-1 Communication networks and systems in substations – Part 8-1:
Specific Communication Service Mapping (SCSM) – Mappings to MMS (ISO 9506-1 and ISO 9506-
2) and to ISO/IEC 8802-3”, 2004
[23] IEC TC 57, “IEC/TR 61850 90-1: Communication networks and systems for power utility automation
– Part 90-1: Use of IEC 61850 for the communication between substations”, 2010
[24] IEC TC 57, “IEC Standard for Telecontrol equipment and systems, IEC 60870-4”, 1990.
[25] Igarashi, G., “Estudo da IEC 61850 e o seu impacto no sistema de automação de subestações”,
Escola Politécnica de São Paulo, 2008
[26] Kanabar, P., Sidhu, T., et al., “Evaluation of Communication Technologies for IEC 61850 based
Distribution Automation System with Distributed Energy Resources”, IEEE, 2009
[27] Kern, T., Andersson, L., et al., “IEC 61850 base digital communication as interface to the primary
equipment”, ABB Switzerland, B3-205, Cigré Paris, 2004
[28] Laverty, D., Morrow, D., Littler, T., “Internet based loss-of-mains detection for distributed
generation”, UPEC, 2007
[29] Laverty, D., Morrow, D., Best, R., Crossley, P., “Telecommunication for Smart Grid: Backhaul
solutions for the Distribution Network”, IEEE, 2010
[30] Leao et al., “The Implementation of the Low Voltage Ride-Through Curve on the Protection System
of a Wind Power Plant”, 2010

78
[31] Leite, A., Trevisan, F., Carrijo, A., “Detalhes da aplicação da norma IEC 61850 no esquema de
teleproteção das linhas LT, IPU-MD 1 e LT IPU-MD 2 da usina hidrelétrica de ITAIPU – Utilização
de mensagens GOOSE”, X STPC, 2010
[32] McGhee, J., “Perspectives and priorities on RuggedComSmart Grid Research - IEC 61850
Technologies”, 23 de Julho de 2010
[33] Ministério da Economia, da Inovação e do Desenvolvimento, “Portaria n.º 596/2010 de 30 de Julho,
Portugal, Diário da República, 1.ª série — N.º 147”, 30 de Julho de 2010
[34] Moore, R., Goraj. M., “Ethernet for IEC 61850”, Pacworld, Cover Story, Setembro de 2010
[35] Nordell, D., “Communication Systems for Distribution Automation”, IEEE, 2008
[36] Oliveira, C., Bowen, A., “Análise de desempenho da comunicação de mensagens GOOSE na WAN
entre subestações para teleproteção de linhas de transmissão e dispositivos elétricos”, XXII
SNPTEE Seminário Nacional de Produção e Transmissão de Energia Elétrica, Outubro de 2013
[37] Paiva, J. P. S., “Redes de Energia Eléctrica, Uma análise sistémica”, 3ª edição, Instituto Superior
Técnico, 2011
[38] Pinto de Sá, J. L., “Estabilização da produção em regime especial e requisitos de protecção e de
controlo automático, Relatório nº 1: Instalações de Energia Eólica”, Abril de 2009
[39] Pinto de Sá, J. L., “Propostas de alteração ao normativo legislativo sobre condições técnicas de
ligação à rede de distribuição de instalações de produção de energia eléctrica”, Dezembro de 2002
[40] Plummer, C., “Communications Networks: The Enablers of Utility Automation Success”, Power
System engineering, Inc, 2009
[41] PNALE, “Plano Nacional de Atribuição de Licenças de Emissão de CO2 2008-2012”, Instituto do
Ambiente/ Governo Português, Lisboa, Junho 2008
[42] Qureshi, M., et al., “A Communication Architecture for Inter-substation Communication”, IEEE 8th
International Conference on Computer and Information Technology Workshops, Julho de 2008
[43] Ramalho, P., “Parques Eólicos com “Ride-Through Fault”: Nova parametrização dos sistemas de
protecção”, Faculdade de Engenharia da Universidade do Porto – FEUP, Junho de 2008
[44] REE, “Integración de la energía eólica en condiciones de seguridad para el sistema”, Red Eléctrica
de España, 2007
[45] REE, “Operación del Sistema con alta penetración de generación eólica”, Red Eléctrica de España,
2012
[46] Sidhu, T., Kanabar, M., Parikh, P., “Implementation Issues with IEC 61850 Based Substation
Automation Systems”, Fifteenth National Power Systems Conference (NPSC), IIT Bombay,
Dezembro de 2008

79
[47] Sidhu, T., Yin, Y., “Modelling and Simulation for Performance Evaluation of IEC61850-Based
Substation Communication Systems”, IEEE Transactions on Power Deliver, Vol.22, No.3, Julho de
2007
[48] Skeie, T., Johannessen, S., Brunner, C., “Ethernet in substation automation”, IEEE Control Systems
Magazine, Vol.22, No.3, pp.43-51, Junho de 2002
[49] Sun, T., Chen, Z., Blaabjerg, F., “Transient Analysis of Grid-Connected Wind Turbines with DFIG
After an External Short-Circuit Fault”, Nordic Wind Power Conference, Chalmers University of
Technology, 1 e 2 de Março de 2004
[50] Uluski, R., Gilchrist, G., “Communications for Distribution Automation”, EnerNex Corporation, 2007
[51] Ward, S., Higinbotham, W., Duvelson, E., “Inside the Cloud – Network Communications Basics for
the Relay Engineer”, Presented to the: 34th Annual Western Protective Relay Conference,
Spokane, WA, Ocotber 16-18, 2007
[52] WECC, “The Technical Basis for the New WECC Voltage Ride-Through (VRT) Standard, A White
Paper Developed by the Wind Generation Task Force1 (WGTF)”, Western Electricity Coordinating
Council, 13 de Junho de 2007
[53] Wen, J., Hammond, C., Udren, E., “Wide-Area Ethernet Network Configuration for System
Protection Messaging”, Texas A&M Conference for Protective Relay Engineers, Abril de 2012
[54] WiMAX Forum, WiMAX™, HSPA+, and LTE: A Comparative Analysis, November 2009
[55] Yang, S., Yang, H., Ahn, Y., Kim, Y., “Performance Analysis of IEC 61850 based Substation”,
advanced Communication Technology (ICACT), 14th International Conference, 2012
[56] Yong-Hui, Y., Lei-Tao, W., Yong-jian, T., "Research of network transmission of process bus based
upon IEC 61850", International Conference on Advanced Power System Automation and
Protection APAP, 2011

80
Anexos
I. Tecnologias de turbinas eólicas
Atualmente são utilizados três tipos de tecnologia de aerogeradores. As características de ligação
destes equipamentos à rede são distintas, tal como o seu funcionamento e sistema de controlo.
a) Máquina de Indução com Rotor em Gaiola - MIRG
Esta é solução mais antiga ocupando ainda 30% do mercado mundial. Estes equipamentos são
simples e robustos apresentando um custo de investimento reduzido. As MIRG são ainda denominadas
de máquinas de velocidade constante. A razão para esta denominação deve-se ao seu funcionamento
numa estreita margem de velocidade angular, com uma variação de apenas 1 a 2% do valor nominal
de operação. Esta tecnologia praticamente não é controlável, possuindo apenas estratégias de controlo
aerodinâmico que consistem na orientação do perfil das pás da turbina, por controlo de pitch e de stall
passivo ou ativo. Um problema destas máquinas é o seu elevado consumo de potência reativa,
principalmente durante a cava e no período de recuperação após um defeito, o que exige o uso de
baterias de condensadores. Contudo, tal contribui pouco para atenuar o consumo de potência reativa,
sendo que a rede elétrica terá de dar esse suporte, o que agrava a cava e por sua vez a instabilidade
da rede. Este facto torna esta solução inviável nos dias atuais, pelo que têm vindo a ser substituídas.
b) Máquina de Indução Duplamente Alimentada – MIDA
O seu funcionamento, em velocidade variável, com recurso a conversores eletrónicos com
capacidades nominais bastante reduzidas (20 a 30% da capacidade nominal do conjunto
turbina/gerador) tem vindo a aumentar a sua popularidade. O sistema de controlo de produção de
energia elétrica deste tipo de aerogerador impõe um binário mecânico que é controlado de acordo com
uma curva de binário ótimo pré-definido, controlo esse que não se baseia na frequência da rede, sendo
a sua contribuição para a inércia do sistema desprezada. A MIDA tem uma configuração de conversores
eletrónicos CA-CC-CA, sendo que o conversor ligado à rede opera à frequência desta. A sua principal
função é a de manter constante a tensão do barramento DC, apesar de poder ser controlado para
fornecer potência reativa. O conversor do lado do rotor funciona a uma frequência variável, de acordo
com a velocidade do rotor. Este conversor tem a função de controlar a MIDA, através da injeção de
tensões ou correntes no rotor da máquina, controlando separadamente a produção de potência ativa e
reativa. Usualmente, os conversores estáticos utilizados são IGBTs, que possibilitam a troca
bidirecional de potência ativa entre o rotor e a rede elétrica. Tem como desvantagem possibilitar um
desacoplamento apenas parcial com a rede, mantendo-se o conversor do lado da rede ligado a esta, o
que pode tornar a MIDA mais vulnerável a perturbações na rede elétrica. Possuem uma maior expansão
atual, com cerca de 50% do mercado mundial, possuindo um menor custo e maior rendimento da
interface eletrónica, podendo ser controlável com um considerável acréscimo de custos.

81
c) Máquina Síncrona de Velocidade Variável – MSVV
Estes equipamentos têm o seu funcionamento caracterizado por uma excitação do rotor por
ímanes permanentes, operando a velocidade variável, de modo a captar o máximo de energia do vento
regulando o ângulo das pás por controlo de pitch ou stall activo. A energia é transferida para a rede por
conversores eletrónicos CA-CC-CA dispostos em cascata, que realizam a ligação entre o estator e a
rede. O conversor ligado à rede elétrica, além de fixar a frequência de saída de acordo com a frequência
da rede, também permite o fornecimento de energia reativa. A presença dos conversores eletrónicos
entre o gerador e a rede tem a vantagem de permitir o total desacoplamento da máquina com a rede.
Este facto leva a que os conversores tenham de ser dimensionados de acordo com a potência nominal,
o que os torna caros. Esta solução é responsável por cerca de 20% do mercado mundial, sendo a
tecnologia dominante em Portugal. Tem a vantagem de ser a melhor inteiramente controlável e por
assim a tecnologia que melhor se adequa a LVRT.
Do ponto de vista da rede, tanto as instalações com tecnologia MSVV como MIDA não
apresentam inércia, a qual é escondida pela interface eletrónica. Na Figura 44 apresentam-se
esquemas simplificados da ligação das diferentes tecnologias à rede elétrica. A MSVV pode ser
adaptada aos requisitos de LVRT com alterações menores no sistema de controlo da respetiva
eletrónica de interface. Para soluções com geradores de indução, a adequação a LVRT implica
mudanças nos parques eólicos. Assim, a capacidade de LVRT pode ser alcançada com a adição de
sistemas de eletrónica flexíveis (FACTS) do tipo STATCOM ou D-VAR. Muitas turbinas instaladas há
poucos anos não possuem capacidade de LVRT e a instalação de equipamentos que as dotem dessa
capacidade é economicamente inviável pelo que em alguns casos a melhor solução é a substituição
das turbinas eólicas por modelos mais atuais que apresentem essa capacidade [38].
Figura 44 - Esquemas de ligação das tecnologias de geradores à rede elétrica, (a) MIDA, (b) MSVV, (c)
MIDA [43]

82
II. Cálculo do envio de mensagens no bus de processo
a) Carga da rede
Para investigação da influência da troca de mensagens GOOSE e SMV, no bus de processo,
Yong-Hui et al. [56] calculou a largura de banda ocupada pelo envio destas mensagens.
A obtenção de valores amostrados utiliza, neste caso, uma taxa de amostragem de 80 amostras
por ciclo, e onde cada amostra contém 8 valores analógicos, considerando-se o tamanho da mensagem
igual a 170 bytes. Assim, o tráfego de informação de uma Merging Unit, para uma frequência de 50 Hz,
pode ser calculado como:
𝑆 = 170 𝑏𝑦𝑡𝑒𝑠 × 8 𝑏𝑖𝑡𝑠/𝑏𝑦𝑡𝑒 × 50 𝑐𝑖𝑐𝑙𝑜𝑠/𝑠 × 80 𝑎𝑚𝑜𝑠𝑡𝑟𝑎𝑠/𝑠 = 5,44 𝑀𝑏𝑝𝑠 (9)
Nesta situação particular, o tráfego de uma única Merging Unit ocupa 5,44% de uma porta de
rede com uma capacidade de 100 Mbps. Assim, para uma instalação que contenha dezenas destes
equipamentos verifica-se que é necessário utilizar mecanismos de gestão de tráfego e melhoria do
desempenho da rede, para permitir o funcionamento simultâneo destes equipamentos.
Da mesma forma, calcula-se a carga para a rede do envio de uma mensagem GOOSE. O
tamanho de uma mensagem GOOSE é variável, mas geralmente não ultrapassa os 300 bytes.
Considerando um intervalo de retransmissão da mensagem de 10 segundos, o tráfego de um terminal
será:
𝑆 = 300 𝑏𝑦𝑡𝑒𝑠 × 8 𝑏𝑖𝑡𝑠/𝑏𝑦𝑡𝑒 × (1/10)/𝑠 = 0,00024 𝑀𝑏𝑝𝑠 = 240 𝑏𝑝𝑠 (10)
b) Componentes de atraso
O atraso da rede de comunicação representa o tempo que a mensagem demora do emissor ao
recetor, através da rede de transmissão. O atraso da rede é composto por diversas componentes como
transmissão na fibra ótica, filas de armazenamento e transmissão, e processamento. Yong-Hui et al.
[56] analisou o atraso de transmissão no nível de processo, para uma velocidade de 100 Mbps (1 Gbps
ao switch principal) e 17 bays, cada uma constituída por Merging Units, equipamentos de monitorização
e proteção, entre outros.
(1) Mecanismo de troca
Normalmente o atraso de troca num switch Ethernet não é superior a 10 µs, sendo considerado
um tempo médio de 7 µs.
(2) Transmissão na fibra ótica
O atraso de transmissão para a distância de 1 km é igual a 5 µs.
(3) Atraso de armazenamento e transmissão (Std)
a.) Atraso de uma mensagem GOOSE (300 bytes), em cada bay:
300 𝑏𝑦𝑡𝑒𝑠 × 8 𝑏𝑖𝑡𝑠/𝑏𝑦𝑡𝑒 × 2/(100 × 106𝑏𝑝𝑠) = 48 𝜇𝑠 (11)

83
b.) Mensagem SMV, com ritmo de amostragem de 80 amostras, com o envio simultâneo e
síncrono por duas Merging Units, com o mesmo tamanho de mensagem (170 bytes), obtém-se o pior
caso:
170 𝑏𝑦𝑡𝑒𝑠 × 8 𝑏𝑖𝑡𝑠/𝑏𝑦𝑡𝑒 × 2/(100 × 106𝑏𝑝𝑠) ≈ 27,2 𝜇𝑠 (12)
c.) Considera-se ainda de o envio de uma mensagem de temporização com 2512 bits:
2512 𝑏𝑖𝑡𝑠 /(100 × 106𝑏𝑝𝑠) ≈ 25 𝜇𝑠 (13)
d.) Então o atraso máximo de armazenamento e transmissão, resultante da soma dos
componentes anteriormente calculados é:
𝑆𝑡𝑑 = 48 + 27,2 + 25 ≈ 100 𝜇𝑠 (14)
(4) Atraso na fila
Para resolver possíveis colisões, os switches criam filas de mensagens na sua entrada.
Considerando a situação mais desfavorável, todas as outras K-1 portas de um switch com K portas
enviam uma mensagem para outra porta ao mesmo tempo. Ignorando o intervalo de tempo entre
mensagens, o maior atraso na fila é cerca de:
(𝐾 − 1) × 𝑆𝑡𝑑 (15)
Como o atraso mínimo é nulo, então o atraso médio na fila de mensagens é igual a:
(𝐾 − 1) × 𝑆𝑡𝑑/2 (16)
Se as portas 1 a 17 do switch principal enviarem mensagens com 1254 bytes para a porta
número 18, ao mesmo tempo, o tempo médio na fila será:
(17/2) × (1254 × 8/(1000 × 106 𝑏𝑝𝑠)) ≈ 85,3 𝜇𝑠 (17)
Então para o envio de mensagens através de switches de dois níveis, o atraso máximo de
transmissão da rede é:
17 × (1254 ×
8
1000 × 106 𝑏𝑝𝑠+ 7 + 85,3) + (𝑆𝑡𝑑 + 7 + (
5
2) × 𝑆𝑡𝑑) ≈ 2,1 𝑚𝑠 (18)
Desta forma, conclui-se que o atraso no envio de mensagens se encontra dentro dos requisitos
definidos pela norma CEI 61850 (< 4 ms), mesmo para uma rede com uma grande complexidade.

84
III. Protocolos para o envio de mensagens em WAN
a) VPN
Uma Virtual Private Network, VPN, é uma rede virtual suportada no topo de uma rede física.
Os dados da rede VPN são separados dos que percorrem a sua rede base, tratando-se assim de uma
ligação privada e segura que transmite os seus dados usando uma rede como a Internet ou outra
infraestrutura de comunicações partilhada. As VPNs utilizam protocolos de tunneling para criar ligações
seguras.
Para transmissão de dados com segurança pode utilizar-se o IPSec, que encapsula pacotes
IP, com o motivo de proteger a informação, usando encriptação. É utilizado quando os pacotes IP têm
de ser trocados entre dois sistemas, protegendo-os contra modificações ao longo do caminho,
fornecendo mecanismos de autenticação, integridade e confidencialidade. O acesso a uma rede destas
é restringido pela necessidade de credenciais de acesso. Esta solução implica poucos custos pois é
possível implementar uma VPN numa ligação Internet existente, o que torna a expansão da rede fácil
e barata.
b) MPLS
O MPLS, Multi Protocol Label Switching, é um mecanismo de encaminhamento de pacotes
entre nós de rede, independente de tecnologias e protocolos específicos. É um mecanismo versátil que
transporta múltiplos tipos de dados e tráfego.
O MPLS rotula os pacotes de dados, o que elimina a necessidade de determinar o que está
contido em cada pacote e permite um meio mais eficiente de transportar informação. Durante o envio
da informação, em vez de se verificarem os pacotes individualmente e então decidir sobre o
encaminhamento, verificam-se os rótulos, o que elimina a necessidade de “abrir” a mensagem. Este
mecanismo inclui múltiplas características de QoS e permite criar redes com centenas de locais numa
área extensa, utilizando uma única infraestrutura, com necessidade de gerir diferentes tipos de tráfego.
É uma tecnologia flexível com muitas capacidades, porém em geral é complexa e pode ser difícil de
gerir em larga escala. Pode também não ser a mais indicada para aplicações críticas, não tendo um
nível de determinismo tão bom como as redes SDH anteriores.
Com este serviço é possível utilizar diversas opções que o utilizam como:
- EoMPLS (camada 2): Ethernet over MPLS é mais rápido do que outros protocolos de tunneling
que aplicam cabeçalhos de camada 3, pois não inclui características adicionais, como segurança ou
QoS, limitando-se a transportar a mensagem através do túnel.
- VPLS/MPLS (camada 2): Virtual Private LAN Service fornece uma interface Ethernet a
utilizadores na WAN, apresentando capacidades de comunicação ponto a multiponto semelhantes às
presentes numa LAN, podendo ser utilizado no envio de mensagens multicast. Este mecanismo
apresenta um bom balanceamento de carga, sendo tipicamente utilizado em redes com muitos locais
e onde é necessário um controlo grande por parte do operador. Apesar de apresentar velocidades

85
elevadas, e a resiliência necessária a aplicações críticas, tem custos proibitivos em grandes
implementações.
- IP/MPLS (camada 3): esta implementação utiliza cabeçalhos IP para o envio de mensagens
através dessa rede. Esta solução apresenta grande fiabilidade e alta disponibilidade e tempo de
recuperação da rede, em caso de falha, em menos de 50 ms. Dado ser baseado em IP apresenta boas
capacidades de segurança, encriptação, autenticação e isolamento de tráfego. O IP/MPLS é uma
tecnologia bastante utilizada por operadores de redes elétricas para as suas comunicações. Porém, a
sua utilização em teleproteção é muito limitada, pois o controlo da variação da latência é bastante
complicado, implicando normalmente variações na ordem de 4 ms.
c) MPLS-TP
O MPLS Transport Profile é um perfil avançado do MPLS, desenhado para ser usado como
uma tecnologia de camada de rede, em redes de transporte. Utiliza mecanismos que dão suporte a
funções críticas de transporte. Tem por base princípios de arquitetura semelhantes aos utilizados em
redes SDH/SONET e OTN, sendo bastante determinístico. É uma tecnologia fiável, baseada em
pacotes, fiável e que se ajusta a redes em larga escala fornecendo mecanismos poderosos de QoS.
Esta é uma melhor opção para redes óticas, pois é mais simples de instalar e gerir do que o IP/MPLS
e tem características similares às anteriores redes SDH.
d) PBB
O Provider Backbone Bridges, PBB, é um conjunto de arquiteturas e protocolos definidos na
norma IEEE 802.1ah. A sua introdução tem como objetivo resolver as limitações da Ethernet em WAN
e permitir a sua utilização à escala mundial. Assim, é possível fornecer serviços Ethernet em WAN,
usando as vantagens de custo e simplicidade de uma rede Ethernet, tendo como base uma rede de
acesso que pode usar praticamente todas as tecnologias como fibra ótica, PLC, DSL, serviços sem
fios, entre outros, permitindo, em muitos casos, manter as instalações atuais de comunicação. As suas
funcionalidades principais incluem gestão sofisticada de tráfego, mecanismos de QoS hierárquicos,
gestão e diagnóstico de falhas, monitorização de desempenho e resiliência semelhante a redes
SDH/SONET. Existem vantagens claras na segurança e interoperabilidade com equipamentos IP,
nomeadamente para situações onde é transportado tráfego de terceiros.
Uma evolução desta tecnologia é o PBB Traffic Engineering, PBB-TE, apresentado na norma
IEEE 802.1Qay, adapta a Ethernet às redes de transporte. Difere do anterior pela criação dinâmica de
tabelas de encaminhamento, tem um comportamento mais previsível e há maior facilidade de controlo
pelo operador. É ainda capaz de interoperabilidade completa com MPLS. As soluções baseadas em
CEI 61850 além do PBB-TE devem incluir Protected Ethernet Ring.
Esta solução é a mais indicada para redes operacionais, que usam esquemas especiais de
proteção e relés de alta velocidade. Relativamente ao MPLS, o PBB-TE é mais indicado para o
funcionamento em subestações, apresentando melhores opções de sincronização de rede e requisitos
de segurança. Por outro lado, não tem o sistema de recuperação determinista existente no MPLS. Em
86
termos de tempos de proteção e latência determinística, a comparação entre o PBB-TE e o MPLS-TS
é semelhante, sendo que o primeiro apresenta vantagem de arquiteturas mais seguras e custo de
investimento e operação cerca de 40% inferiores aos do MPLS.
Este protocolo é também utilizado fortemente pelo mercado de fornecedores de ligações sem
fios, devido aos requisitos de latência e de desempenho que podem ser atingidos, com um custo inferior
relativamente ao MPLS. Esta tecnologia ainda não se encontra a ser muito utilizada comparativamente
com MPLS que é mais antiga e tem uma base maior.
e) Outros protocolos em Camada 2 do modelo OSI
Um túnel GRE (Generic Routing Encapsulation) define um formato de encapsulamento
genérico para roteamento. Este mecanismo é dos mais simples pois carece de mecanismos
relacionados com o controlo de fluxo e de segurança, o que facilita o processo de configuração. No
entanto, pode ser complementado com IPSec para fins de segurança. Ao contrário de VPNs, os túneis
GRE podem ser usados utilizados para encaminhar tráfego multicast, o que permite o envio de uma
mensagem para múltiplas subestações. O seu uso é feito normalmente quando não há necessidade de
encriptar as mensagens, o que pressupõe que não irá ser utilizado em redes públicas, mas apenas na
rede privada do operador da rede elétrica.
O L2TP, Layer 2 Tunneling Protocol, é um protocolo de tunneling, que funciona sobre uma rede
IP e que pode ser utilizado para suportar VPNs. A sua implementação é simples devido a não fornecer
qualquer mecanismo de encriptação e confidencialidade, tendo de recorrer a IPSec para tal. Deste
modo, o encapsulamento das mensagens é rápido e o tráfego é simples de gerir em termos de QoS.
Este serviço é normalmente utilizado por fornecedores de telecomunicações em ligações como ADSL.

87
IV. Topologias de rede
a) Topologia em estrela
A topologia em estrela é a arquitetura mais básica utilizada em redes de comunicação com
switches. De acordo com a Figura 45, cada um dos switches é ligado ao switch N, sendo este o ponto
central da rede. A utilização desta topologia apresenta o menor atraso de transmissão, pois a
comunicação entre quaisquer dois switches requer no máximo dois ‘hops’, entre o switch de partida e
o central (switch N) e deste para o switch de chegada. As vantagens principais são a simplicidade,
escalabilidade, baixo custo e facilidade de configuração. Porém, não introduz qualquer redundância na
rede, não sendo resistente a falhas. No caso de falha do switch central verifica-se que todos os switches
ficam isolados e se uma das ligações de uplink falha, então a ligação a todos os DEIs ligados a esse
switch é perdida [17].
Figura 45 - Topologia em estrela [17]
b) Topologia em anel simples
Nesta topologia cada switch está ligado ao anterior e ao seguinte através de duas das suas
portas. Adicionalmente, o primeiro e o último switch estão ligados formando-se um loop. Dada a
presença do loop, a topologia em anel é uma estrutura de comunicação que necessita de recorrer a
‘managed switches’, que fazem uma gestão interna das ligações, identificam os loops e implementam
o protocolo de RSTP. O atraso temporal da transmissão de mensagens é semelhante ao da topologia
anterior. A topologia introduz redundância na rede, pois no caso de uma ligação entre switches falhar,
os switches da rede reconfiguram-se automaticamente para funcionar em dois caminhos diferentes,
dado a comunicação funcionar em ambos os sentidos do anel, tal como indicado na Figura 46.
Um problema desta topologia é a existência de latências não determinísticas ao longo do anel,
pois a mudança na localização do caminho de backup tem impacto na latência. As limitações existentes
são ditadas pelo número máximo de ‘hops’ no anel, sendo a escalabilidade da rede um grande
problema [5]. O tempo de recuperação da rede aumenta com o número de switches e existem
problemas de gestão do tráfego, devido à sua má segmentação, o que pode causar problemas de
segurança e atrasos na transmissão. Esta topologia é uma das opções mais utilizadas nomeadamente
em aplicações de distribuição e transmissão.

88
Figura 46 - Topologia em anel simples em modo normal e modo de recuperação [5]
c) Topologia de anéis múltiplos
A utilização da topologia em anel é complicada em instalações de grandes dimensões, sendo
mais eficaz para o desempenho da rede a utilização de vários anéis, mais pequenos, como indicado
na Figura 47, restringidos a um local, por exemplo a uma bay ou nível de tensão. Esta topologia é
tipicamente utilizada em aplicações de transmissão. A vantagem da topologia é a separação lógica da
rede, que segue a topologia física da subestação ou a separação natural dos DEIs em grupos
diferentes, divididos por aplicações de controlo e proteção [34]. As ligações redundantes podem ser
estabelecidas entre esses anéis utilizando diferentes métodos, dependendo dos requisitos da rede e
da sua distribuição física. A separação lógica do tráfego entre os anéis deve ser conseguida utilizando
mecanismos como redes virtuais ou filtragem multicast.
Figura 47 - Topologia em anéis múltiplos [34]
d) Anel de DEIs
A utilização desta topologia está dependente do uso de DEIs com funcionalidades de switch
Ethernet incorporadas, que são ligados em anel como mostrado na Figura 48. Para realizar o anel de
DEIs é necessário, tal como para a topologia em anel, utilizar um mecanismo de gestão de redundância.
Esta topologia tem alguns benefícios para aplicações não-críticas pois oferece uma redução de custo,
eliminando um número significativo de ligações de rede e switches. Um dos problemas apresentados
é a fiabilidade reduzida, pois em caso de falha de software ou hardware do DEI, a rede pode ser
perturbada. Apresenta também problemas de manutenção e atualização da rede, que implicam a
interrupção de funcionamento de toda a rede.

89
Figura 48 - Anel de DEIs [34]
e) Topologia híbrida estrela-anel / estrela redundante
Este exemplo indica uma topologia que pode suportar qualquer uma das falhas anteriormente
detetadas às restantes topologias. A comunicação entre todos os switches é composta por ligações
redundantes. Sendo uma topologia híbrida que possui características das topologias em estrela e anel
irá possuir as capacidades das topologias individuais. Tal como demonstrado na Figura 49 existem dois
switches centrais (backbone) ligados entre si, onde um deles que faz o backup de todas as ligações.
Esta topologia é resistente a falhas de ligação entre switches e o backbone, falha do backbone e falha
de ligação entre os dois backbones.
Figura 49 - Topologia híbrida estrela-anel, com indicação de falhas suportadas [17]
No caso da topologia em estrela redundante, toda a rede é duplicada, o que apresenta um
custo elevado dada a duplicação do número de switches e à maior complexidade dos DEIs. De modo
a concretizar esta topologia é necessário a utilização de DEIs que utilizem dois endereços de IP
diferentes para ser possível utilizar as duas redes independentes. A gestão da redundância da rede em
caso de falha é feita com recurso a PRP.

90
V. Proteção de instalações sem capacidade de LVRT
As regulações das proteções apresentadas surgem do trabalho de Pinto de Sá [38] e seguem
a metodologia e regras técnicas adotadas pela rede francesa da EDF [11].
a) Proteções e Automação nas centrais eólicas ligadas à rede MT
Para representar as diversas situações de ligação de centrais, que podem ocorrer na Média
Tensão, a Figura 50 identifica a tipologia base dos cinco tipos estudados. Assume-se neste caso que
o regime de neutro vigente utiliza uma impedância limitadora a 300 A ou 1000 A, ou é isolado.
Figura 50 - Topologia base para definição de tipos de centrais ligadas na Média Tensão [38]
A partir da figura é possível distinguir dois tipos de ligações principais: ligação direta e exclusiva
à subestação (Tipo A), e partilha da ligação com ramal de consumidores (Tipo B). Distinguem-se ainda
as instalações pela sua potência relativa, risco de funcionamento em ilha e utilização de religação
rápida.
A distinção entre as eólicas de potência fraca e potência considerável encontra-se explicita na
Tabela 22, onde Sn Tr representa a potência do transformador da subestação associado à ligação à
central eólica, e Pmax representa a potência máxima de carga no ramal.
Tabela 22 – Distinção entre instalações eólicas de “fraca potência” e “potência considerável”
Tipo de Instalação
Ligação Exclusiva Partilhada Exclusiva Partilhada
Sn (produtores eólicos) < 15% Sn Tr < 15% Sn Tr ≥ 15% Sn Tr ≥ 15% Sn Tr
Sn (produtores no ramal) N.A. < 25% Pmax N.A. ≥ 25% Pmax
Fraca Potência Potência Considerável

91
a. Eólica de fraca potência com ponto de interligação numa linha aérea de MT partilhada
com consumidores e com religação automática
Esta situação (tipo H.1 na EDF) é representada pela situação B, na Figura 50. A instalação
eólica deve ser desligada de imediato, no caso de ocorrer um defeito numa das derivações da linha
partilhada com os consumidores. Tal permite facilitar a religação rápida implementada. Esta instalação
estará sujeita a desligações frequentes, provocadas por defeitos em outras saídas da subestação,
dadas as suas regulações em tensão bastante restritivas. As regulações recomendadas são as
seguintes:
Tabela 23 – Regulação de proteções para a situação “a.” da rede de Média Tensão
b. Eólica de fraca potência com ponto de interligação em cabo subterrâneo ou misto, ou
em linha sem religação automática, partilhada com consumidores
Esta situação (tipo H.2 na EDF) é de igual modo representado pela situação B, na Figura 50,
no caso de não ser utilizada religação automática rápida na linha. Tal pode dever-se à rede utilizar cabo
subterrâneo, por ser mista, ou por a linha só conter instalações produtoras e a utilização da religação
rápida seja posta de parte. As parametrizações recomendadas são:
Tabela 24 - Regulação de proteções para a situação “b.” da rede de Média Tensão
Esta instalação não irá sofrer disparos não seletivos, devido à temporização das proteções de
máximo de tensão homopolar e de mínimo de tensão. No caso de um defeito na linha da instalação,
esta será desligada de imediato, pelos “limiares altos” da proteção de mínimo de tensão, se o defeito
for polifásico, ou pela proteção de máximo de tensão homopolar, se o defeito for fase-terra.
Tipo de Proteção Regulação Temporização
10% em Neutro Impedante
50% em Neutro Isolado
minU (U direta) 85% 0,02 – 0,05 (instantâneo)
MaxU (U direta) 115% 0,02 – 0,05 (instantâneo)
minF 47,5 Hz 0,02 – 0,05 (instantâneo)
MaxF 51,5 Hz 0,02 – 0,05 (instantâneo)
0,02 – 0,05 (instantâneo)MaxUH (U homopolar)
Tipo de Proteção Regulação Temporização
MaxUH (U homopolar) 10% em Neutro Impedante Maior Top das prot. MIH da Sub. + 0,5 s
Limiar Baixo 50% em Neutro Isolado 2 x Maior Top das prot. MIHD da Sub. + 0,65 s
MaxUH (U homopolar) 70% em Neutro Impedante 0,02 – 0,05 (instantâneo)
Limiar Alto N.A. em Neutro Isolado -
minU (U direta)
Limiar Baixo
minU (U direta)
Limiar Alto
MaxU (U direta) 115% Top = 0,10 s
minF 47,5 Hz 0,02 – 0,05 (instantâneo)
MaxF 51,5 Hz 0,02 – 0,05 (instantâneo)
25% 0,02 – 0,05 (instantâneo)
85% Maior Top das prot. MI da Sub. + 0,5 s

92
Para que as instalações eólicas beneficiem da proposta de alteração das proteções, devem
cumprir os seguintes requisitos:
→ Capacidade de suportar cavas com queda de tensão até 25%, por períodos iguais ou
superiores a 1 segundo;
→ Capacidade de operação com um desvio de frequência nominal de -2,5 Hz a +1,5 Hz, por
períodos de 1 segundo ou mais.
c. Eólica de potência considerável com ponto de interligação numa linha aérea de MT,
partilhada com consumidores e com religação automática
Este caso (Tipo H.3 na EDF) é semelhante ao caso “a.”, com a diferença da potência da
instalação eólica. Neste caso há a possibilidade de funcionamento em ilha, o que requer proteções de
frequência mais sensíveis, de modo a detetar essa situação. Neste caso, as regulações recomendadas
são as seguintes:
Tabela 25 - Regulação de proteções para a situação “c.” da rede de Média Tensão
A sensibilidade da proteção de frequência permite a deteção imediata de separação de redes,
garantindo o sucesso da religação automática. Da mesma forma, irão impedir a operação da instalação
eólica no caso de uma rede elétrica com desvios de frequência significativos.
Para que as instalações eólicas beneficiem da proposta de alteração das proteções, devem
cumprir os seguintes requisitos:
→ Capacidade de suportar cavas com queda de tensão até 25%, por períodos iguais ou
superiores a 1 segundo.
d. Eólica de fraca potência com ligação direta e exclusiva à subestação
Esta situação corresponde ao representado pela instalação A, da Figura 50. A instalação eólica
tem uma ligação exclusiva e direta à subestação, que possui um disjuntor dedicado a esta linha. Deste
modo, não é geralmente utilizado o mecanismo de religação rápida em situações deste género. Nesta
situação, recomendam-se as seguintes parametrizações para as proteções:
Tipo de Proteção Regulação Temporização
MaxUH (U homopolar) 10% em Neutro Impedante Maior Top das prot. MIH da Sub. + 0,5 s
Limiar Baixo 50% em Neutro Isolado 2 x Maior Top das prot. MIHD da Sub. + 0,65 s
MaxUH (U homopolar) 70% em Neutro Impedante 0,02 – 0,05 (instantâneo)
Limiar Alto N.A. em Neutro Isolado -
minU (U direta)
Limiar Baixo
minU (U direta)
Limiar Alto
MaxU (U direta) 115% Top = 0,10 s
minF 49,5 Hz 0,02 – 0,05 (instantâneo)
MaxF 50,5 Hz 0,02 – 0,05 (instantâneo)
25% 0,02 – 0,05 (instantâneo)
85% Maior Top das prot. MI da Sub. + 0,5 s
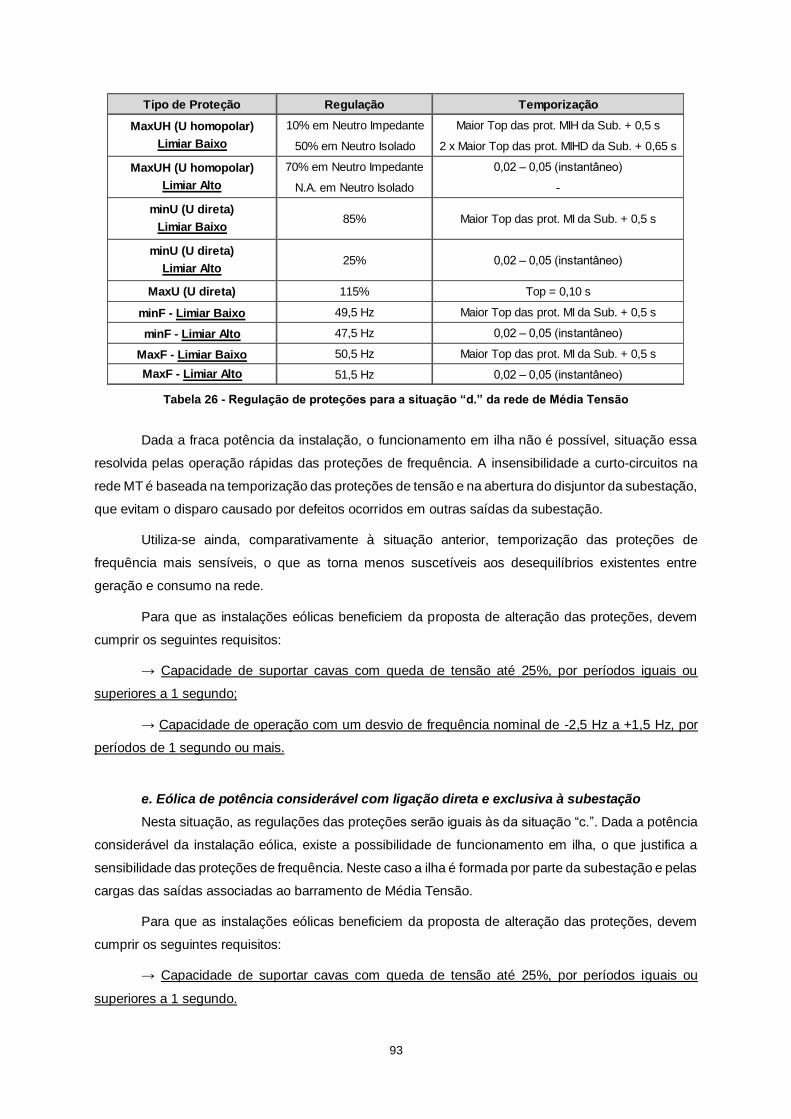
93
Tabela 26 - Regulação de proteções para a situação “d.” da rede de Média Tensão
Dada a fraca potência da instalação, o funcionamento em ilha não é possível, situação essa
resolvida pelas operação rápidas das proteções de frequência. A insensibilidade a curto-circuitos na
rede MT é baseada na temporização das proteções de tensão e na abertura do disjuntor da subestação,
que evitam o disparo causado por defeitos ocorridos em outras saídas da subestação.
Utiliza-se ainda, comparativamente à situação anterior, temporização das proteções de
frequência mais sensíveis, o que as torna menos suscetíveis aos desequilíbrios existentes entre
geração e consumo na rede.
Para que as instalações eólicas beneficiem da proposta de alteração das proteções, devem
cumprir os seguintes requisitos:
→ Capacidade de suportar cavas com queda de tensão até 25%, por períodos iguais ou
superiores a 1 segundo;
→ Capacidade de operação com um desvio de frequência nominal de -2,5 Hz a +1,5 Hz, por
períodos de 1 segundo ou mais.
e. Eólica de potência considerável com ligação direta e exclusiva à subestação
Nesta situação, as regulações das proteções serão iguais às da situação “c.”. Dada a potência
considerável da instalação eólica, existe a possibilidade de funcionamento em ilha, o que justifica a
sensibilidade das proteções de frequência. Neste caso a ilha é formada por parte da subestação e pelas
cargas das saídas associadas ao barramento de Média Tensão.
Para que as instalações eólicas beneficiem da proposta de alteração das proteções, devem
cumprir os seguintes requisitos:
→ Capacidade de suportar cavas com queda de tensão até 25%, por períodos iguais ou
superiores a 1 segundo.
Tipo de Proteção Regulação Temporização
MaxUH (U homopolar) 10% em Neutro Impedante Maior Top das prot. MIH da Sub. + 0,5 s
Limiar Baixo 50% em Neutro Isolado 2 x Maior Top das prot. MIHD da Sub. + 0,65 s
MaxUH (U homopolar) 70% em Neutro Impedante 0,02 – 0,05 (instantâneo)
Limiar Alto N.A. em Neutro Isolado -
minU (U direta)
Limiar Baixo
minU (U direta)
Limiar Alto
MaxU (U direta) 115% Top = 0,10 s
minF - Limiar Baixo 49,5 Hz Maior Top das prot. MI da Sub. + 0,5 s
minF - Limiar Alto 47,5 Hz 0,02 – 0,05 (instantâneo)
MaxF - Limiar Baixo 50,5 Hz Maior Top das prot. MI da Sub. + 0,5 s
MaxF - Limiar Alto 51,5 Hz 0,02 – 0,05 (instantâneo)
85% Maior Top das prot. MI da Sub. + 0,5 s
25% 0,02 – 0,05 (instantâneo)

94
b) Proteções e Automação nas centrais eólicas ligadas à rede AT
Dado existirem instalações eólicas com potência inferior a 10 MW ligadas à rede de Alta
Tensão, é necessário definir a filosofia de proteções a aplicar nestes casos, considerando todas as
instalações de potência considerável. Assim, pode ser possível o funcionamento em ilha destas
instalações, no caso de desligação das restantes chegadas AT da subestação, o que obriga a uma
grande sensibilidade das proteções de frequência.
As situações possíveis são idênticas às situações (c.) e (e.) analisadas para a Média Tensão.
Como tal, a regulação das proteções deve ser similar, com a diferença das maiores potências de curto-
circuito e da maior variabilidade de tensão na rede AT, o que justifica ajustes nas proteções de tensão.
Tabela 27 - Regulação das proteções para instalações da rede AT, sem capacidade de LVRT
Para que as instalações eólicas beneficiem da proposta de alteração das proteções, devem
cumprir os seguintes requisitos:
→ Capacidade de suportar cavas com queda de tensão até 45%, por períodos iguais ou
superiores a 1 segundo.
Tipo de Proteção Regulação Temporização
MaxUH (U homopolar)
Limiar Baixo
MaxUH (U homopolar)
Limiar Alto
minU (U direta)
Limiar Baixo
minU (U direta)
Limiar Alto
MaxU (U direta) 115% 0,02 – 0,05 (instantâneo)
minF 49,5 Hz 0,02 – 0,05 (instantâneo)
MaxF 50,5 Hz 0,02 – 0,05 (instantâneo)
45% 0,02 – 0,05 (instantâneo)
85%Maior Top das prot. MIH da rede AT de inserção
+ 0,4 s
5% (Neutro sólido à terra)Maior Top das prot. MIH da rede AT de inserção
+ 0,4 s
50% 0,02 – 0,05 (instantâneo)
Top Related