






Languages
Pages
Legal

Algorytmy ewolucyjne
optymalizacji
wielokryterialnej sterowane
preferencjami decydenta
listopad 2010
Dr Janusz Miroforidis
MGI Metro Group Information Technology Polska Sp. z o.o.
2
Plan prezentacji
Wprowadzenie
Wielokryterialne Podejmowanie Decyzji
Oszacowania parametryczne
Wyznaczanie wariantów efektywnych
Zmodyfikowane oszacowania parametryczne
Algorytmy ewolucyjne dla wyznaczania oszacowań parametrycznych
Przykłady obliczeń
Zastosowanie metody w WPD
Podsumowanie
3
Problemy decyzyjne
w działalności człowieka
Zarządzanie zasobami leśnymi i wodnymi.
Planowanie zagospodarowania terenów.
Zagadnienia logistyczne i transportowe.
Konstruowanie maszyn i urządzeń.
Planowanie terapii nowotworowej.
Handel i marketing.
Wprowadzenie

4
Wielokryterialne zadanie decyzyjne
0vmax ( ), ,nf x x X R
Przy ustalonym zadaniu optymalizacji
wielokryterialnej:
gdzie vmax jest operatorem wyznaczania zbioru
wariantów efektywnych, decydent ma wskazać
wariant najbardziej preferowany w tym zbiorze.
Wielokryterialne Podejmowanie Decyzji
1 2( ) ( ), ( ), , ( ) ,kf x f x f x f x

5
Metody interaktywne WPD
Istotą tych metod jest interaktywny, sterowany przez
decydenta przegląd zbioru ocen efektywnych.
f2(x)
Wielokryterialne Podejmowanie Decyzji
f(X0)
f(E(X0)) - zbiór
ocen efektywnych
f1(x)
Preferencje określane np.
przez współczynniki
wagowe, punkty
referencyjne.

6
Skalaryzacja zadania optymalizacji
wielokryterialnej
f2(x)
f(X0)
f1(x)
y*
Wyznaczanie ocen (słabo) efektywnych
z wykorzystaniem ważonej metryki Czebyszewa.
0
*( ) arg min max ( ) ,i i ix X i
x y f x
gdzie
1, 0, 1, , .i i i i k
warunki konieczne i dostateczne istnienia ocen (słabo) efektywnych bez dodatkowych założeń o cechach zbioru f(X0) (np. wypukłość);
nie wprowadza dodatkowych nieliniowości do zadania optymalizacji.
Zalety takiej skalaryzacji:
0
*
( )max , 0, 1, , ,i i i i
y f Xy y e e i k
*y y t
Wielokryterialne Podejmowanie Decyzji

7
Określanie preferencji decydenta
za pomocą kierunków ustępstw
f2(x)
f(X0)
f1(x)
y*
τ
Wektor τ określa proporcje ustępstw
przy odejściu od punktu y*.
( ( )) ( )f x f
*y y t
Wielokryterialne Podejmowanie Decyzji
8
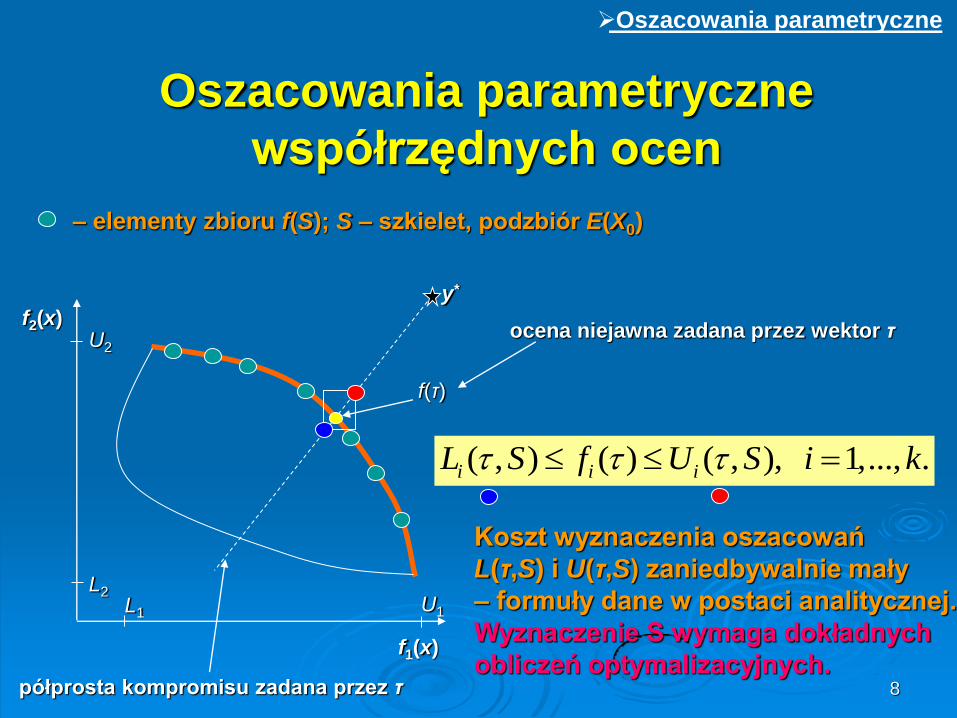
Oszacowania parametryczne
współrzędnych ocen
f2(x)
f(τ)
– elementy zbioru f(S); S – szkielet, podzbiór E(X0)
ocena niejawna zadana przez wektor τ U2
L2 L1 U1
półprosta kompromisu zadana przez τ
( , ) ( ) ( , ), 1,..., .i i iL S f U S i k
Koszt wyznaczenia oszacowań
L(τ,S) i U(τ,S) zaniedbywalnie mały
– formuły dane w postaci analitycznej.
Wyznaczenie S wymaga dokładnych
obliczeń optymalizacyjnych.
Oszacowania parametryczne
y*
f1(x)
9
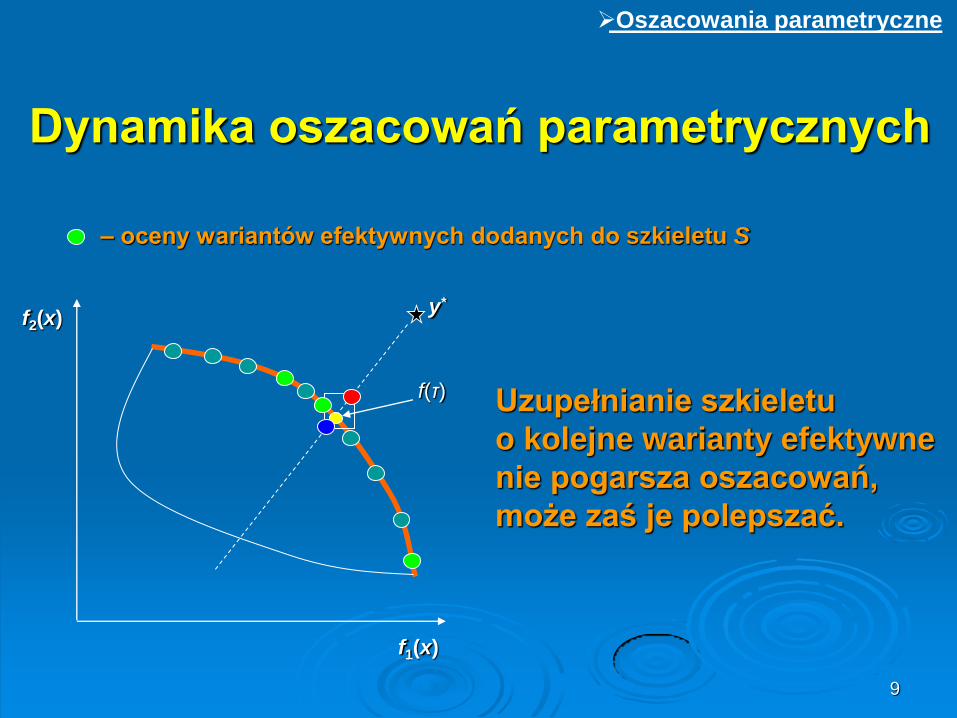
Dynamika oszacowań parametrycznych
– oceny wariantów efektywnych dodanych do szkieletu S
Uzupełnianie szkieletu
o kolejne warianty efektywne
nie pogarsza oszacowań,
może zaś je polepszać.
Oszacowania parametryczne
f2(x)
f(τ)
y*
f1(x)

10
Algorytmy ewolucyjne dla wyznaczania
aproksymacji zbioru wariantów efektywnych
Algorytmy ewolucyjnej optymalizacji wielokryterialnej:
NSGA-II, SPEA-2.
Zastosowanie w metodach
a posteriori WPD.
Wyznaczanie wariantów efektywnych
f2(x)
f1(x)
– iteracja imax - 2 – iteracja imax - 1 – iteracja imax
f(X0)
11
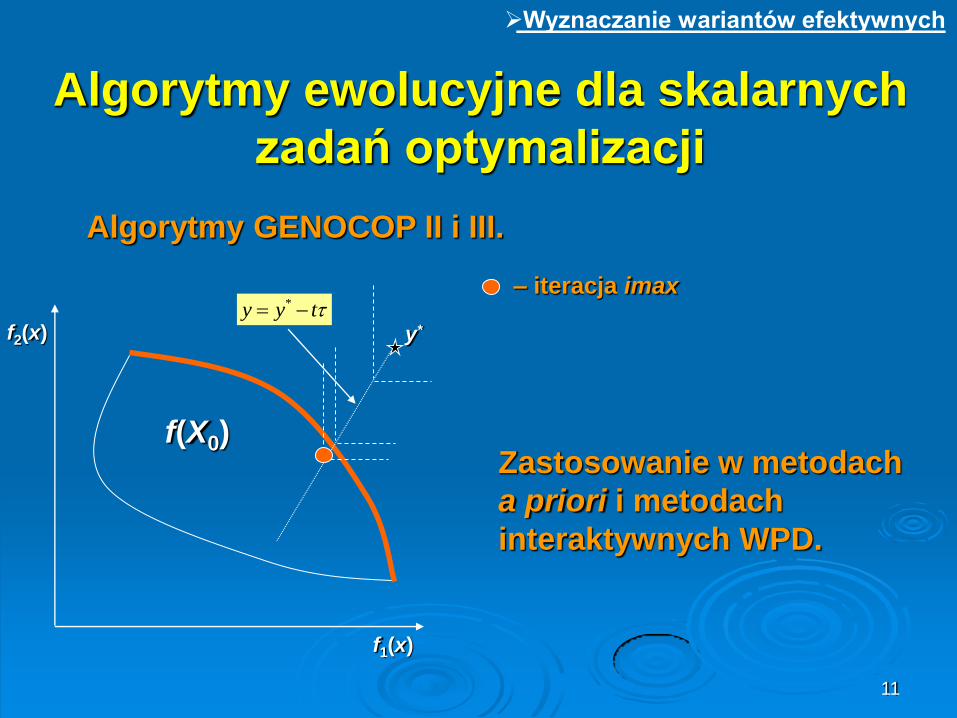
Algorytmy ewolucyjne dla skalarnych
zadań optymalizacji
Algorytmy GENOCOP II i III.
Zastosowanie w metodach
a priori i metodach
interaktywnych WPD.
Wyznaczanie wariantów efektywnych
– iteracja imax
f2(x)
f(X0)
f1(x)
y*
*y y t
12
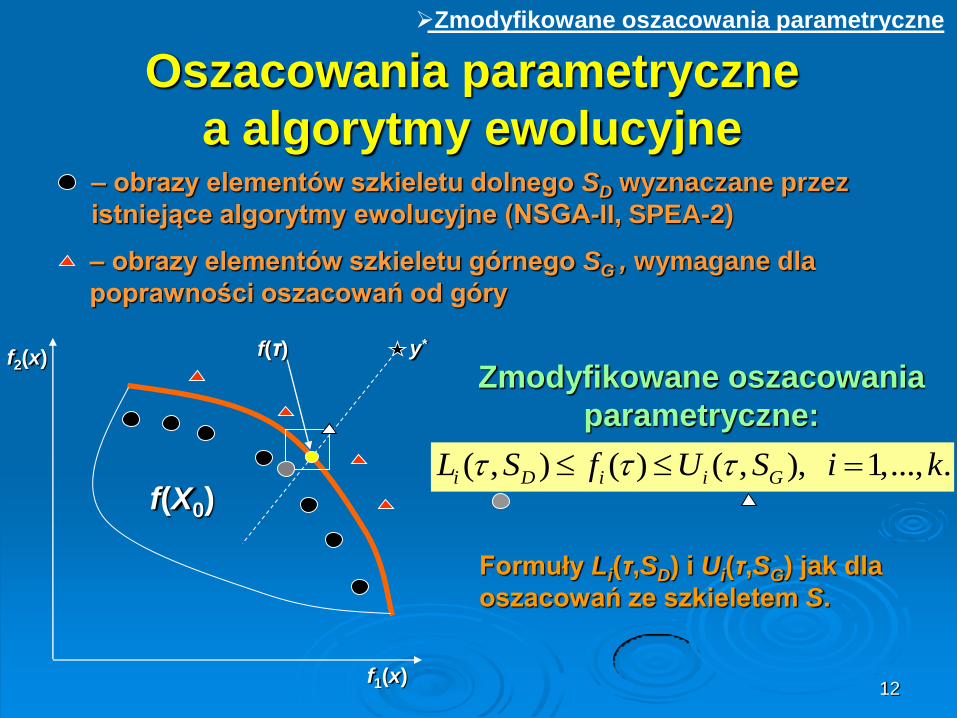
Oszacowania parametryczne
a algorytmy ewolucyjne
– obrazy elementów szkieletu dolnego SD wyznaczane przez
istniejące algorytmy ewolucyjne (NSGA-II, SPEA-2)
– obrazy elementów szkieletu górnego SG , wymagane dla
poprawności oszacowań od góry
y* f(τ) f2(x)
f1(x)
( , ) ( ) ( , ), 1,..., .i D i i GL S f U S i k
Zmodyfikowane oszacowania
parametryczne:
f(X0)
Zmodyfikowane oszacowania parametryczne
Formuły Li(τ,SD) i Ui(τ,SG) jak dla
oszacowań ze szkieletem S.
13
Szkielet dolny SD
0 , ,D DS X S
' ' .D Dx S x S x x
Zmodyfikowane oszacowania parametryczne
14
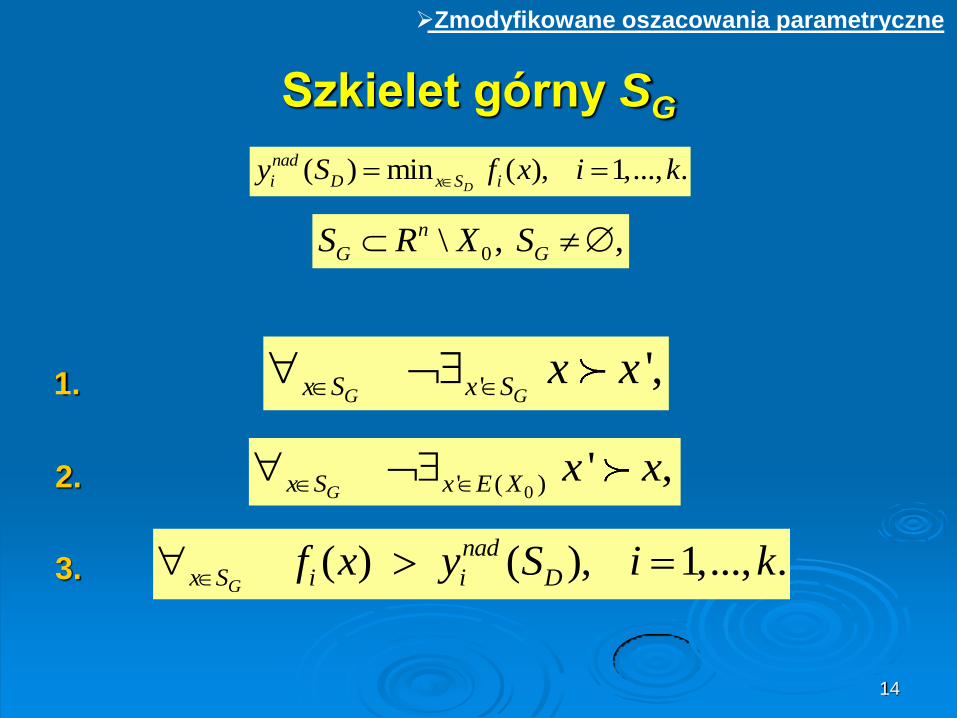
Szkielet górny SG
0\ , ,n
G GS R X S
( ) min ( ), 1,..., .D
nad
i D x S iy S f x i k
' ',G Gx S x S x x 1.
0' ( ) ' ,Gx S x E X x x 2.
( ) ( ), 1,..., .G
nad
x S i i Df x y S i k 3.
Zmodyfikowane oszacowania parametryczne
15
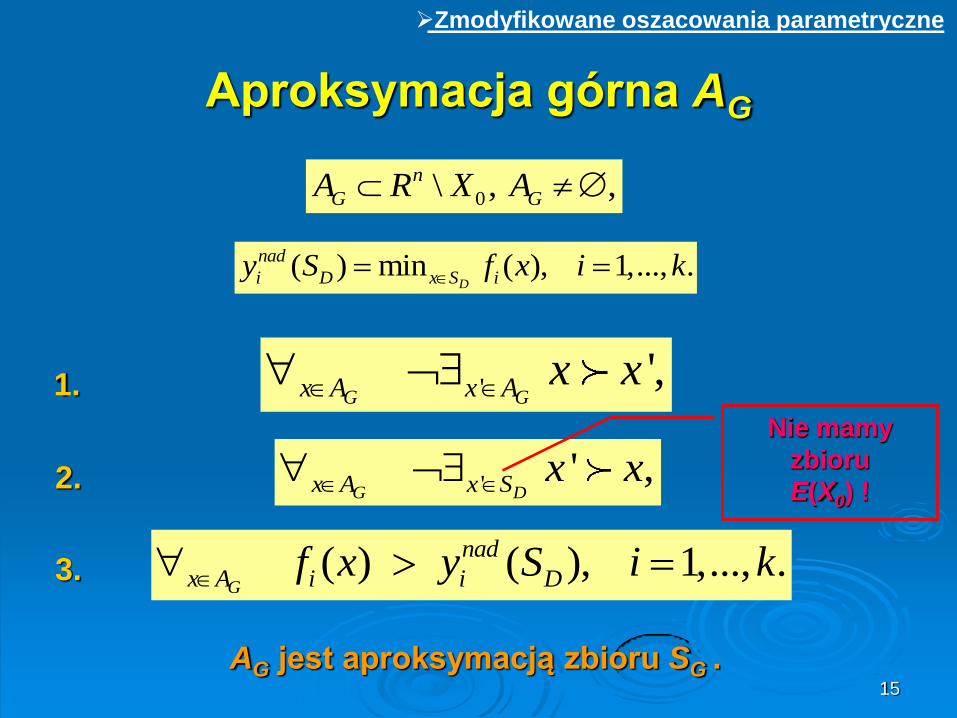
Aproksymacja górna AG
( ) min ( ), 1,..., .D
nad
i D x S iy S f x i k
' ',G Gx A x A x x 1.
' ' ,G Dx A x S x x 2.
( ) ( ), 1,..., .G
nad
x A i i Df x y S i k 3.
Nie mamy
zbioru
E(X0) !
Zmodyfikowane oszacowania parametryczne
0\ , ,n
G GA R X A
AG jest aproksymacją zbioru SG .

16
Wykorzystanie par (SD, AG) do
wyznaczania wartości oszacowań
( , )i GU A
Oszacowania od góry – wykorzystanie aproksymacji górnej
( , ), 1,..., .i GU S i k zamiast
Miary dokładności oszacowań
Bezwzględna dokładność oszacowania oceny f(τ):
1
( , , ) max ( , ) ( , ) .D G i G i Di k
S A U A L S
Względna dokładność oszacowania oceny f(τ):
max min1
( , ) ( , )( , , ) max ,
( ) ( )
i G i DD G
i ki D i D
U A L SS A
f S f S
gdzie max ( ) max ( ),D
i D ix S
f S f x
min ( ) min ( ).
Di D i
x Sf S f x
Zmodyfikowane oszacowania parametryczne
17
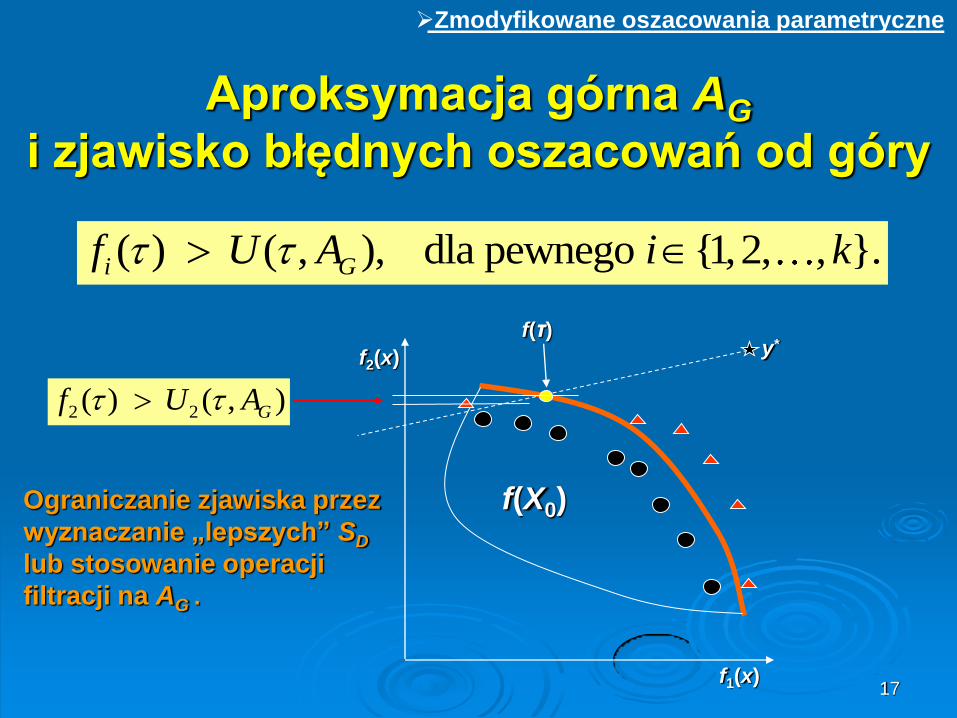
Aproksymacja górna AG
i zjawisko błędnych oszacowań od góry
( ) ( , ), dla pewnego {1,2, , }.i Gf U A i k
Zmodyfikowane oszacowania parametryczne
y*
f(τ) f2(x)
f1(x)
f(X0)
2 2( ) ( , )Gf U A
Ograniczanie zjawiska przez
wyznaczanie „lepszych” SD
lub stosowanie operacji
filtracji na AG .
18
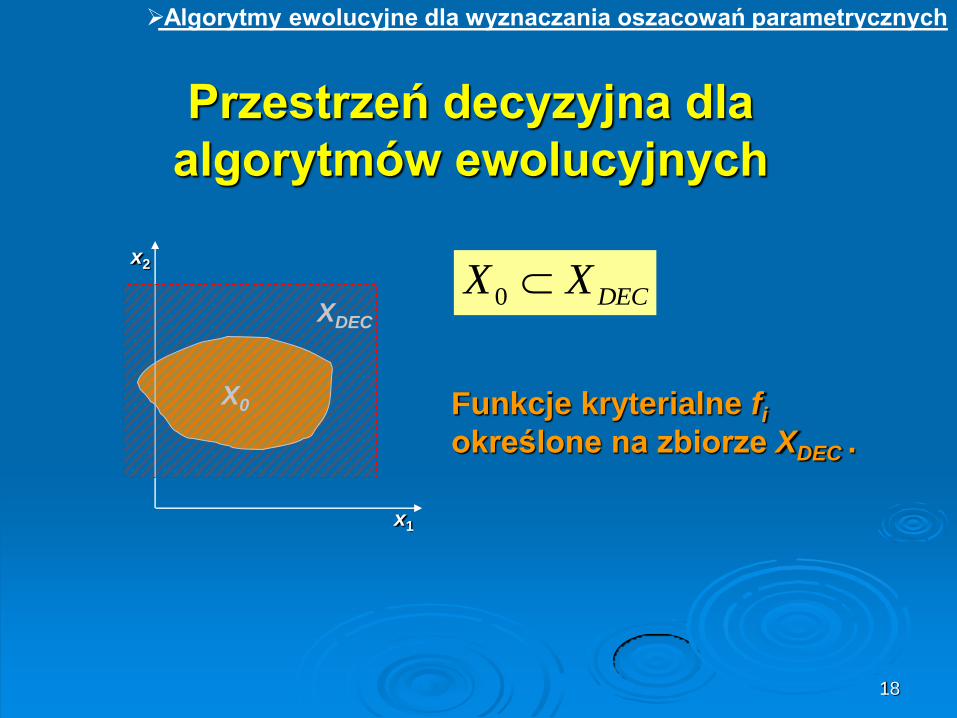
Przestrzeń decyzyjna dla
algorytmów ewolucyjnych
Algorytmy ewolucyjne dla wyznaczania oszacowań parametrycznych
x2
x1
X0 Funkcje kryterialne fi
określone na zbiorze XDEC .
XDEC
0 DECX X
19
Wyznaczanie par (SD , AG)
– algorytm PDAE
Jednoczesne wyznaczanie par (SD , AG) poprzez eksplorację zbioru dopuszczalnego i jego dopełnienia.
Kryterium zatrzymania określone maksymalną liczbą iteracji.
Eksploracja przestrzeni poszukiwań realizowana operatorem mutacji o zasięgu będącym malejącą funkcją numeru iteracji.
Algorytm PDAE – w każdej iteracji mutacji podlega losowo wybrany element bieżącego szkieletu dolnego SD . Możliwe modyfikacje schematu mutacji.
Algorytmy ewolucyjne dla wyznaczania oszacowań parametrycznych
20
Lokalne poprawianie par (SD , AG)
– algorytm EPO
Próbuje wyznaczyć taką parę (SD , AG), która zapewnia założoną dokładność oszacowania oceny f(τ).
Eksploruje przestrzeń decyzji w otoczeniu (i tylko w otoczeniu) elementów determinujących wartość oszacowania oceny f(τ) odpowiednio od dołu i od góry.
Zasięg mutacji jest zależny od osiągniętej dokładności oszacowania oceny f(τ) na danym etapie obliczeń.
Algorytmy ewolucyjne dla wyznaczania oszacowań parametrycznych

21
Algorytmy PDAE i EPO
Wynik działania algorytmu PDAE,
wyznaczenie wyjściowego szkieletu
dolnego i wyjściowej aproksymacji
górnej.
Wynik działania algorytmu EPO
dla εz=0,01.
Testowe zadanie dwukryterialne (Kita)
Przykłady obliczeń
22
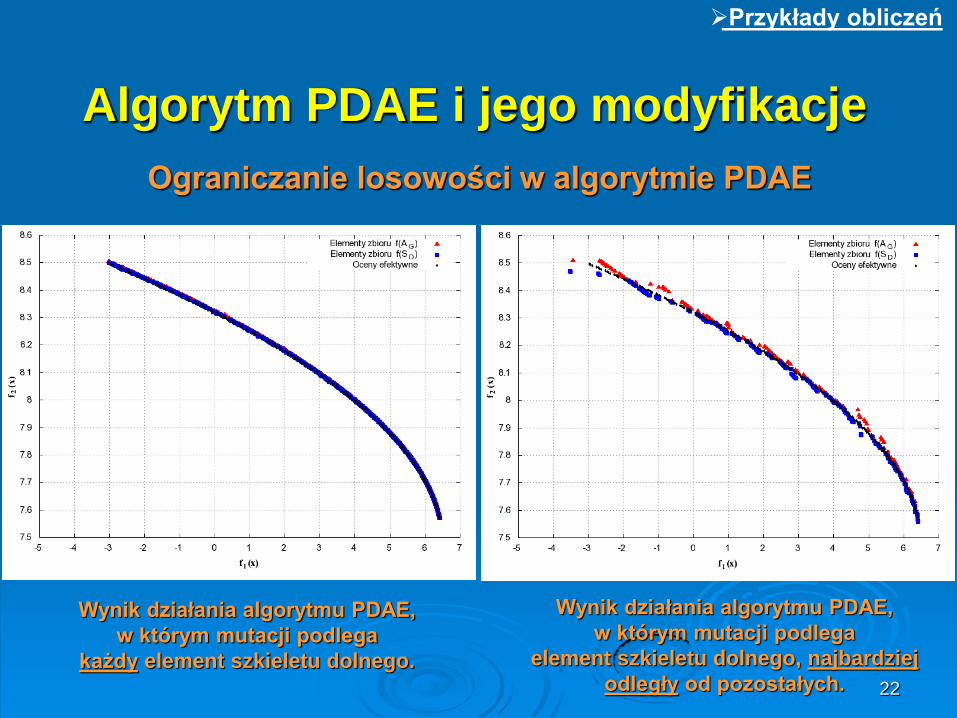
Algorytm PDAE i jego modyfikacje
Wynik działania algorytmu PDAE,
w którym mutacji podlega
każdy element szkieletu dolnego.
Wynik działania algorytmu PDAE,
w którym mutacji podlega
element szkieletu dolnego, najbardziej
odległy od pozostałych.
Ograniczanie losowości w algorytmie PDAE
Przykłady obliczeń
23
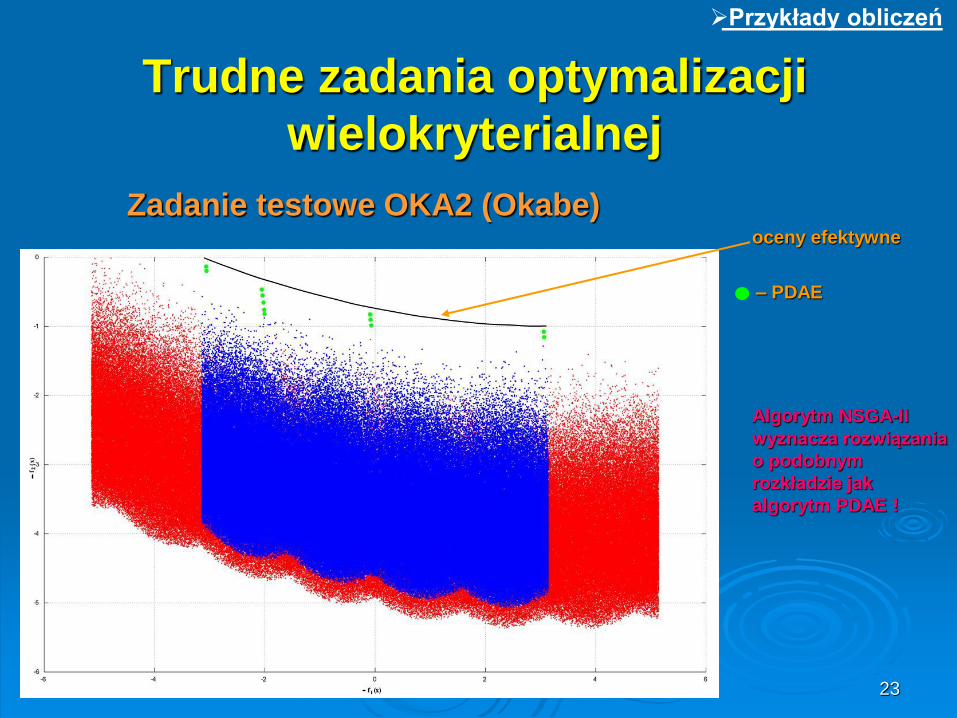
Trudne zadania optymalizacji
wielokryterialnej
Zadanie testowe OKA2 (Okabe)
Przykłady obliczeń
– PDAE
oceny efektywne
Algorytm NSGA-II
wyznacza rozwiązania
o podobnym
rozkładzie jak
algorytm PDAE !

24
Schemat metody rozwiązania
wielokryterialnego zadania decyzyjnego
Sformułowanie zadania optymalizacji
wielokryterialnej dla zadania decyzyjnego
Repozytorium
par (SD , AG)
START
Faza ujawniania preferencji (τ)
Faza identyfikacji rozwiązania (x(τ))
STOP
Algorytmy PDAE i EPO
Algorytm GENOCOP III
Wybór „najlepszej” pary
Wybór populacji
wyjściowej dla algorytmu
GENOCOP III
Zastosowanie metody w WPD
25
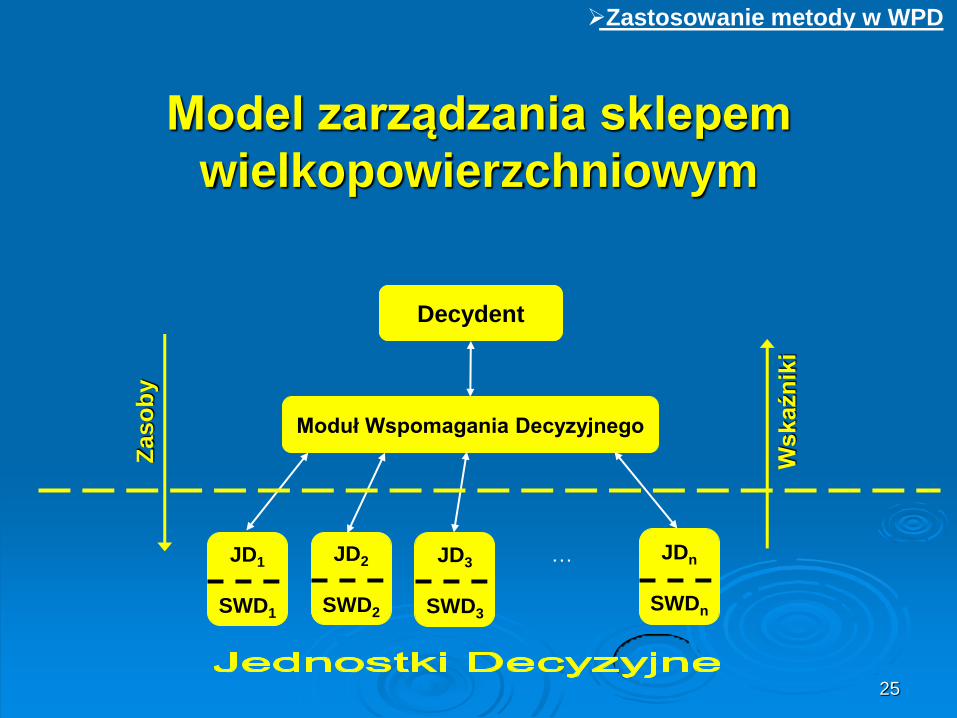
Model zarządzania sklepem
wielkopowierzchniowym
Decydent
Moduł Wspomagania Decyzyjnego
JD1
SWD1
JD2
SWD2
JD3
SWD3
JDn
SWDn
Zaso
by
Wskaźn
iki
…
Zastosowanie metody w WPD
26
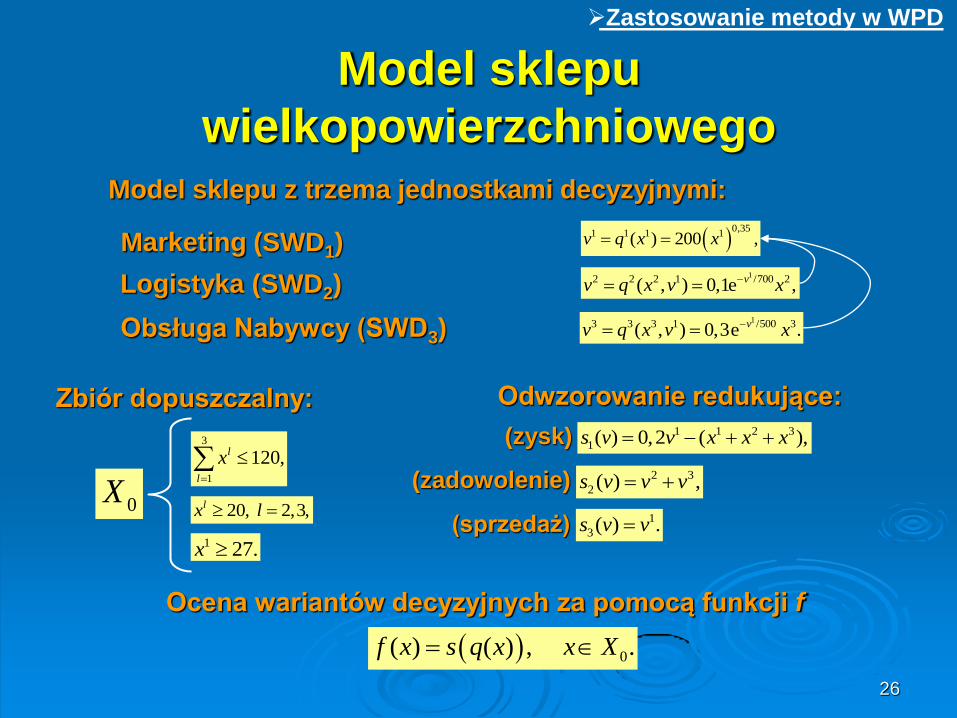
Model sklepu
wielkopowierzchniowego Model sklepu z trzema jednostkami decyzyjnymi:
Marketing (SWD1)
3
1
120,l
l
x
20, 2,3,lx l
1 27.x
0,35
1 1 1 1( ) 200 ,v q x x
12 2 2 1 /700 2( , ) 0,1e ,vv q x v x
13 3 3 1 /500 3( , ) 0,3e .vv q x v x
Logistyka (SWD2)
Obsługa Nabywcy (SWD3)
Zbiór dopuszczalny:
0X
Odwzorowanie redukujące: 1 1 2 3
1( ) 0,2 ( ),s v v x x x
2 3
2( ) ,s v v v
1
3( ) .s v v
Ocena wariantów decyzyjnych za pomocą funkcji f
0( ) ( ) , .f x s q x x X
Zastosowanie metody w WPD
(zysk)
(zadowolenie)
(sprzedaż)
27
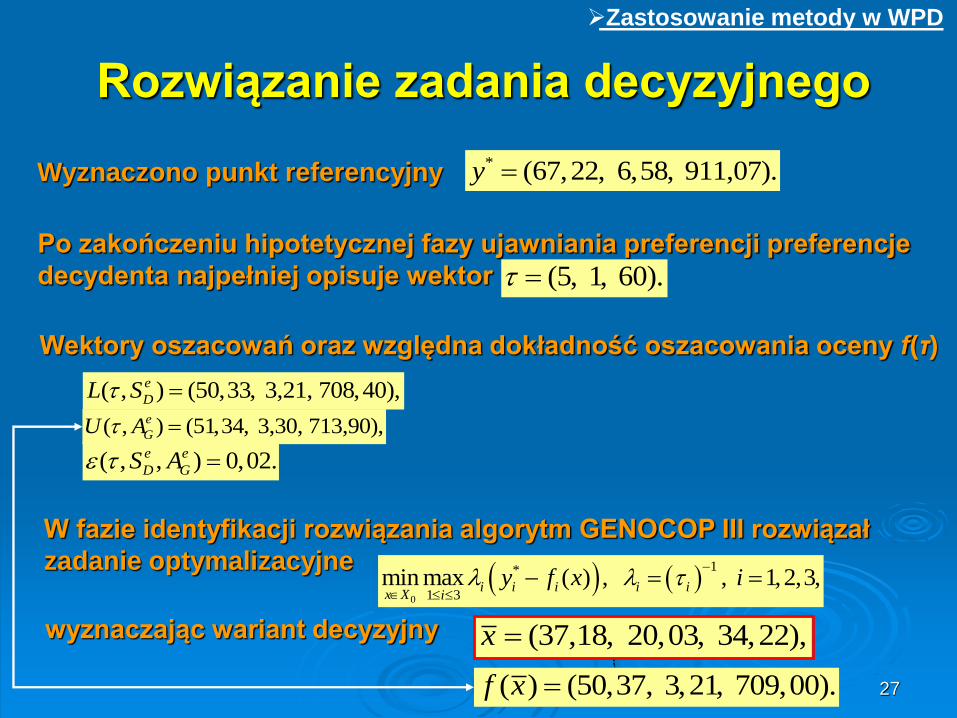
Rozwiązanie zadania decyzyjnego
Po zakończeniu hipotetycznej fazy ujawniania preferencji preferencje
decydenta najpełniej opisuje wektor (5, 1, 60).
* (67,22, 6,58, 911,07).y Wyznaczono punkt referencyjny
0
1*
1 3min max ( ) , , 1,2,3,i i i i ix X i
y f x i
( , ) (50,33, 3,21, 708,40),e
DL S
( , ) (51,34, 3,30, 713,90),e
GU A
( , , ) 0,02.e e
D GS A
Wektory oszacowań oraz względna dokładność oszacowania oceny f(τ)
W fazie identyfikacji rozwiązania algorytm GENOCOP III rozwiązał
zadanie optymalizacyjne
(37,18, 20,03, 34,22),x wyznaczając wariant decyzyjny
( ) (50,37, 3,21, 709,00).f x
Zastosowanie metody w WPD
28
Podsumowanie
Metoda rozwiązania zadania decyzyjnego
Wykorzystanie oszacowań ocen efektywnych w procesie decyzyjnym.
Mechanizm kontroli dokładności oszacowań.
Redukcja obliczeń w procesie decyzyjnym.
Połączenie metod analitycznych z metodami heurystycznymi.
Wykorzystanie zbioru niedopuszczalnego zadania optymalizacji wielokryterialnej – nowatorska modyfikacja idei algorytmów ewolucyjnych.
Podsumowanie

29
Podsumowanie
Potencjalne kierunki dalszych badań
Modyfikacja wiodących algorytmów heurystycznych optymalizacji wielokryterialnej dla potrzeb wyznaczania szkieletów dolnych i aproksymacji górnych.
Przyjęcie i zbadanie własności alternatywnych definicji zbiorów aproksymujących zbiór wariantów efektywnych od dołu i od góry.
Zbadanie skłonności decydentów do podejmowania decyzji w oparciu o oszacowania wartości współrzędnych ocen.
Hybrydyzacja ze względu na trudne zadania optymalizacji wielokryterialnej.
Podsumowanie
31
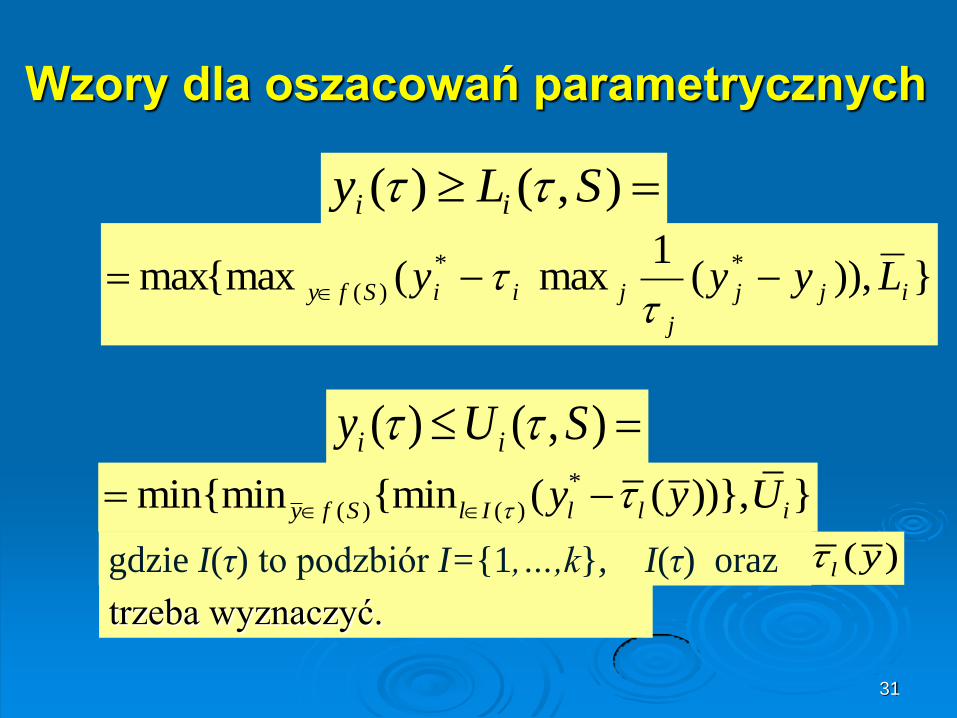
Wzory dla oszacowań parametrycznych
),()( SLy ii
})),(1
max(max{max **
)( ijj
j
jiiSfy Lyyy
),()( SUy ii *
( ) ( )min{min {min ( ( ))}, }y f S l I l l iy y U
( )l ygdzie I(τ) to podzbiór I={1,…,k}, I(τ) oraz
trzeba wyznaczyć.
32
0 0( ) ( ) \ : , gdzie ( ) to otoczenie .nx E X N x x X x x N x x
Warunek 1 dla szkieletu górnego SG :
0 0( ) ( ) : .x E X N x x X x x
Warunek 2 dla szkieletu górnego SG :
Warunki osiągnięcia dowolnie bliskich aproksymacji zbioru wariantów
efektywnych.
Top Related