







Languages
Pages
Legal


Wykład 6
Informatyka Stosowana
14 listopada 2016
Informatyka Stosowana Wykład 6 14 listopada 2016 1 / 29

f) Funkcje trygonometryczne
sin x , cos x - dziedzina R, okres 2π = 360
sin x jest funkcja nieparzysta, tzn. sin(−x) = − sin xcos x jest funkcja parzysta, tzn. cos(−x) = cos x
Informatyka Stosowana Wykład 6 14 listopada 2016 2 / 29

tg x - dziedzina R \ (2k + 1)π2 , okres π = 180
ctg x - dziedzina R \ kπ, okres π = 180
tg(180 + x) = tg x , ctg(180 + x) = ctg x , tg(360 + x) = tg x , ...tzn. dla dowolnego k ∈ Z mamy
tg(180 · k + x) = tg x , ctg(180 · k + x) = ctg x
tg x jest funkcja nieparzysta, tzn. tg(−x) = − tg xctg x jest funkcja nieparzysta, tzn. ctg(−x) = − ctg x
Informatyka Stosowana Wykład 6 14 listopada 2016 3 / 29
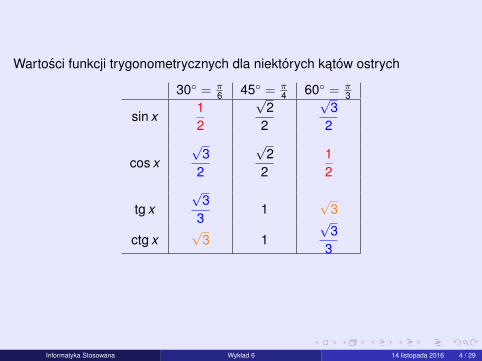
Wartosci funkcji trygonometrycznych dla niektórych katów ostrych
30 = π6 45 = π
4 60 = π3
sin x12
√2
2
√3
2
cos x√
32
√2
212
tg x√
33
1√
3
ctg x√
3 1√
33
Informatyka Stosowana Wykład 6 14 listopada 2016 4 / 29

g) Funkcje cyklometryczne
Funkcje cyklometryczne to funkcje odwrotne do funkcjitrygonometrycznych.poniewaz funkcje trygonometryczne nie sa róznowartosciowe, nalezywybrac taki odcinek, na którym dana funkcja jest róznowartosciowa
arcus sinus x (arc sin x) jest funkcja odwrotna do funkcji sin x ,ograniczonej do przedziału [−π
2 ,π2 ].
arcus cosinus x (arc cos x) ..... cos x ograniczonej do przedziału [0, π].
arcus tangens x (arc tg x) ..... tg x ograniczonej do przedziału (−π2 ,
π2 ).
arcus cotangens x (arc ctg x) ..... ctg x ograniczonej do przedziału (0, π).
Informatyka Stosowana Wykład 6 14 listopada 2016 5 / 29

arc sin x
Dla x ∈ [−1,1] oraz y ∈ [−π2 ,
π2 ]
y = arc sin x ⇔ x = sin y
Przykłady: arc sin 12 = π
6 , arc sin(−√
32 ) = −π
3 , arc sin 1 = π2
Informatyka Stosowana Wykład 6 14 listopada 2016 6 / 29

arc cos x
Dla x ∈ [−1,1] oraz y ∈ [0, π]
y = arc cos x ⇔ x = cos y
Przykłady: arc cos 12 = π
3 , arc cos(−√
32 ) = π − π
6 = 5π6 , arc cos 1 = 0
Informatyka Stosowana Wykład 6 14 listopada 2016 7 / 29

arc tg x
Dla x ∈ R oraz y ∈ (−π2 ,
π2 )
y = arc tg x ⇔ x = tg y
Przykłady: arc tg√
33 = π
6 , arc tg(−√
3) = −π3 , arc tg 1 = π
4
Informatyka Stosowana Wykład 6 14 listopada 2016 8 / 29

arc ctg x
Dla x ∈ R oraz y ∈ (0, π)
y = arc ctg x ⇔ x = ctg y
Przykłady: arc ctg√
33 = π
3 , arc ctg(−1) = π − π4 = 3π
4 , arc ctg 1 = π4
Informatyka Stosowana Wykład 6 14 listopada 2016 9 / 29

Wzory
arc sin x + arc cos x =π
2
arc tg x + arc ctg x =π
2
arc sin(−x) = −arc sin x
arc cos(−x) = π − arc sin x
arc tg(−x) = −arc tg x
arc ctg(−x) = π − arc ctg x
Informatyka Stosowana Wykład 6 14 listopada 2016 10 / 29

Zbiory
Informatyka Stosowana Wykład 6 14 listopada 2016 11 / 29

Oznaczenia:
A,B,C, .... - Zbiory (oznaczane wielka litera)a,b, c, ... - elementy zbioru (oznaczane mała litera)a ∈ A czytamy: element a nalezy do zbioru Aa /∈ A czytamy: element a nie nalezy do zbioru A
Informatyka Stosowana Wykład 6 14 listopada 2016 12 / 29

DefinicjaZbiór, którego wszystkimi elementami sa a1,a2, . . . ,an nazywamy zbioremskonczonym i oznaczamy
a1,a2, . . . ,an
DefinicjaLiczebnoscia zbioru A (inaczej moca zbioru) nazywamy liczbe elementównalezacych do zbioru A i oznaczamy |A|.
Zbiór, którego moc jest okreslona przez pewna liczbe naturalna nazywamyzbiorem skonczonym.
PrzykładA = 1,
√3,8, to |A| = 3.
Informatyka Stosowana Wykład 6 14 listopada 2016 13 / 29

DefinicjaZbiór, który nie zawiera zadnego elementu nazywamy zbiorem pustym ioznaczamy symbolem ∅
DefinicjaZbiory nazywamy równymi, gdy składaja sie z tych samych elementów.
DefinicjaMówimy, ze zbiór A jest podzbiorem zbioru B, czyli A ⊂ B, gdy kazdyelement zbioru A jest równoczesnie elementem zbioru B, zatem
A ⊂ B ⇔(
x ∈ A⇒ x ∈ B).
Zatem w zbiorze B moga byc elementy, które nie naleza do zbioru A.
Informatyka Stosowana Wykład 6 14 listopada 2016 14 / 29

DefinicjaZbiory nazywamy rozłacznymi, gdy nie maja zadnego elementu wspólnego.
Przykład
1,3,5 ∩ 2,4 = ∅
1,3,5 ∩ 1,2 = 1.
WłasnoscJezeli A ⊂ B i B ⊂ A, to A = B.
Informatyka Stosowana Wykład 6 14 listopada 2016 15 / 29

Definicja (Działania na zbiorach)- Suma zbiorów A i B (ozn. A ∪ B) to zbiór punktów, które naleza do
zbioru A albo naleza do zbioru B, czyli
A ∪ B = x : x ∈ A ∨ x ∈ B
- Iloczyn (czesc wspólna) zbiorów A i B (ozn. A ∩ B), to zbiór punktów,które naleza równoczesnie do zbioru A i do zbioru B, czyli
A ∩ B = x : x ∈ A ∧ x ∈ B;
- Róznica zbiorów A i B (ozn. A \ B) to zbiór punktów, które naleza dozbioru A, ale nie naleza do zbioru B, czyli
A \ B = x : x ∈ A ∧ x /∈ B,
- Dopełnienie zbioru A (ozn. A′) to zbiór punktów, które nie naleza dozbioru A, tzn.
A′ = x : x ∈ Ω ∧ x /∈ A,
Informatyka Stosowana Wykład 6 14 listopada 2016 16 / 29

WłasnoscDla dowolnych zbiorów A,B,C zachodza własnosci:
a) A ∪ B = B ∪ A, A ∪ ∅ = A, A ∪ A′
= Ω
b) A ∩ B = B ∩ A A ∩ ∅ = ∅, A ∩ A′
= ∅c) (A ∪ B) ∩ C = (A ∩ C) ∪ (B ∩ C)
d) (A ∩ B) ∪ C = (A ∪ C) ∩ (B ∪ C)
e) prawa de Morgana dla zbiorów
(A ∪ B)′ = A′ ∩ B′, (A ∩ B)′ = A′ ∪ B′
oraz wiele innych, np.
f) A \ (B ∪ C) = (A \ B) ∩ (A \ C)
g) A \ (B ∩ C) = (A \ B) ∪ (A \ C)
Zadanie Sprawdzic, czy dla dowolnych zbiorów A,B,C prawdziwe sarównosci:
a) (A ∪ B ∪ C) \ (A ∪ B) = Cb) A \ (B ∪ C) = (A \ B) \ C
Informatyka Stosowana Wykład 6 14 listopada 2016 17 / 29

DefinicjaIloczynem kartezjanskim zbiorów A oraz B (ozn. A× B) nazywamy zbiór
(x , y) : x ∈ A ∧ y ∈ B.
Warto pamietac, ze zwykle
A× B 6= B × A.
Informatyka Stosowana Wykład 6 14 listopada 2016 18 / 29

Przykład
a) A = 1,2,B = 1, to
A× B = (1,1), (2,1)
B × A = (1,1), (1,2);
b) A = 1,2,B = 0,1,2, to
A× B = (1,0), (1,1), (1,2), (2,0), (2,1), (2,2);
c) R2 = R× R = (x , y), x ∈ R ∧ y ∈ R;
d) A = [1,2],B = [0,1]
A× B =? B × A =?
e) A = N = 1,2,3, ...,B = [0,1]
A× B =? B × A =?
Informatyka Stosowana Wykład 6 14 listopada 2016 19 / 29

Zadanie Sprawdzic, czy dla dowolnych zbiorów A,B,C prawdziwe sarównosci:
a) (A× B) ∪ (C × B) = (A ∪ C)× Bb) (A× B) ∩ (C × B) = (A ∩ C)× B
Informatyka Stosowana Wykład 6 14 listopada 2016 20 / 29

Relacje
Informatyka Stosowana Wykład 6 14 listopada 2016 21 / 29

DefinicjaRelacja w zbiorze A× B nazywamy dowolny podzbiór iloczynukartezjanskiego A× B .
Zatem R ⊂ A× B.
Zapisy(a,b) ∈ R i aRb
sa równowazne.
Informatyka Stosowana Wykład 6 14 listopada 2016 22 / 29

DefinicjaRelacja R ⊂ A× A jest
zwrotna, jesli dla kazdego a ∈ A zachodzi aRa;symetryczna, jesli dla wszystkich a,b ∈ A zachodzi
aRb ⇒ bRa;
przechodnia, gdy dla dowolnych a,b, c ∈ A zachodzi
aRb ∧ bRc ⇒ aRc;
antysymetryczna, jesli dla wszystkich a,b ∈ A zachodzi
aRb ⇒ ∼ bRa;
słabo antysymetryczna, jesli dla wszystkich a,b ∈ A zachodzi
aRb ∧ bRa ⇔ a = b
.
Informatyka Stosowana Wykład 6 14 listopada 2016 23 / 29

Zadanie 1
Rozwazmy dowolny podzbiór A ⊂ R. Okresl, które z powyzszych własnoscimaja nastepujace relacje w zbiorze A:
a) xRy ⇔ x < y ; (rozwiazane ponizej)b) xRy ⇔ x ≤ y ; (rozwiazane ponizej)c) xRy ⇔ x = y ;
d) xRy ⇔ x 6= y .
Informatyka Stosowana Wykład 6 14 listopada 2016 24 / 29

a) xRy ⇔ x < y
zwrotna: sprawdzamy, czy dla kazdego x ∈ A zachodzi xRx ;
Zauwazmy, ze xRx oznacza, ze x < x , co oczywiscie nie jest prawdziwebo liczba nie moze byc mniejsza od samej siebie.Zatem R nie jest zwrotna.
symetryczna: sprawdzamy, czy dla wszystkich x , y ∈ A zachodzi
xRy ⇒ yRx ;
Załózmy, ze xRy , tzn. x < y . Pytamy,czy yRx , czyli równowaznie y < x .Oczywiscie jesli x < y , to formuła y < x nie jest prawdziwa. Zatem R niejest symetryczna.
przechodnia: sprawdzamy, czy dla wszystkich x , y , z ∈ A zachodzi
xRy ∧ yRz ⇒ xRz;
Załózmy, ze dla dowolnych x , y , z ∈ A zachodza xRy i yRz, czyli x < y iy < z. Oczywiscie musi zachodzic wtedy x < z, co dokładnie oznacza zexRz. Stad R jest przechodnia.
Informatyka Stosowana Wykład 6 14 listopada 2016 25 / 29

a) xRy ⇔ x < y
antysymetryczna: sprawdzamy, czy dla wszystkich x , y ∈ A zachodzi
xRy ⇒ ∼ yRx .
Załózmy, ze xRy , tzn. x < y . Pytamy, czy stad wynika, ze ∼ yRx .Zauwazmy, ze
∼ yRx ⇔ ∼ (y < x) ⇔ x 6 y
Oczywiscie jesli (dla dowolnych x , y ) x < y , to prawda jest, ze x 6 y .Zatem R jest antysymetryczna.
słabo antysymetryczna: sprawdzamy, czy dla wszystkich x , y ∈ Azachodzi zaleznosc
xRy ∧ yRx ⇔ x = y .
Załózmy, ze xRy i yRx , tzn. x < y i y < x . Oczywiscie nie wynika stad, zex = y . Zatem R nie jest słabo antysymetryczna.
Informatyka Stosowana Wykład 6 14 listopada 2016 26 / 29

b) xRy ⇔ x 6 y
zwrotna: sprawdzamy, czy dla kazdego x ∈ A zachodzi xRx ;
Zauwazmy, ze xRx oznacza, ze x 6 x , co oczywiscie dla dowolnego xjest prawdziwe. Zatem R jest zwrotna.
symetryczna: sprawdzamy, czy dla wszystkich x , y ∈ A zachodzi
xRy ⇒ yRx ;
Załózmy, ze xRy , tzn. x 6 y . Pytamy, czy yRx , czyli równowaznie y 6 x .Oczywiscie jesli x 6 y , to formuła y 6 x nie jest prawdziwa. Zatem R niejest symetryczna.
przechodnia: sprawdzamy, czy dla wszystkich x , y , z ∈ A zachodzi
xRy ∧ yRz ⇒ xRz;
Załózmy, ze dla dowolnych x , y , z ∈ A zachodza xRy i yRz, czyli x 6 y iy 6 z. Oczywiscie musi zachodzic wtedy x 6 z, co dokładnie oznacza zexRz. Stad R jest przechodnia.
Informatyka Stosowana Wykład 6 14 listopada 2016 27 / 29

b) xRy ⇔ x 6 y
antysymetryczna: sprawdzamy, czy dla wszystkich x , y ∈ A zachodzi
xRy ⇒ ∼ yRx .
Załózmy, ze xRy , tzn. x 6 y . Pytamy, czy stad wynika, ze ∼ yRx .Zauwazmy, ze
∼ yRx ⇔ ∼ (y 6 x) ⇔ x < y .
Oczywiscie jesli x 6 y , to nie jest prawda jest, ze x < y (bo nie jest toprawda dla x = y ). Zatem R nie jest antysymetryczna.
słabo antysymetryczna: sprawdzamy, czy dla wszystkich x , y ∈ Azachodzi zaleznosc
xRy ∧ yRx ⇔ x = y .
Załózmy, ze xRy i yRx , tzn. x 6 y i y 6 x . Oczywiscie wynika stad, zex = y . Zatem R jest słabo antysymetryczna.
Informatyka Stosowana Wykład 6 14 listopada 2016 28 / 29

Dziekuje za uwage !
Informatyka Stosowana Wykład 6 14 listopada 2016 29 / 29
Top Related