







Languages
Pages
Legal

1
PowerPoint 电子演示文稿
第三章 直流脉宽调速系统及其仿真第一节 直流脉宽调速系统概述脉宽调制——将恒定的直流电压调制成极性可变、大小可调的
脉冲电压,实现直流电机电枢端电压的平滑调节。PWM ( Pulse Width Modulation )由 GTO 、 GTR 、 IGBT
、 P-MOSFET 等全控型器件组成的脉冲宽度调制器。与 V-M 系统相比, PWM-M 的优越性:(1) 主电路线路简单,需用的功率元件少;(2) 开关频率高,电流易连续,谐波少,电机损耗和发热较小;(3) 低速性能好,稳速精度高,调速范围宽;(4) 系统快速响应性能好,动态抗扰能力强;
2
PowerPoint 电子演示文稿
(5) 主电路元件工作在开关状态,导通损耗小,装置效率较高; (6) 直流电源采用不可控三相整流时,功率因数高。 全控型器件构成的直流脉宽调速系统的原理是一样的,只是不同器件具有各自不同的驱动、保护及器件的使用问题。 PWM-M 系统和 V-M 系统的主要区别在主电路和 PWM 控制电路。闭环控制系统以及静、动态分析和设计基本相同。 本章以 GTR 为例介绍直流脉宽调制的主电路和它的控制电路(如果是其它全控型器件,其分析方法是类似的)。

3
PowerPoint 电子演示文稿第二节 PWM 变换器和 PWM-M 系统开环机械特性
一、脉宽调制原理 脉冲宽度调制( PWM )是通过功率管的开关作用,将恒
定直流电压转换成频率一定,宽度可调的方波脉冲电压,通过调节脉冲电压的宽度而改变输出电压平均值的一种功率变换技术。由脉宽调制器向电机供电的系统称为脉宽调速系统,简称PWM-M 调速系统。
图 3-1 PWM-M 调速系统(a) 系统原理图
(b) 输出电压波形
4
PowerPoint 电子演示文稿假定 VT 先导通 ton ,这期间电源电压全部加到电枢上,然后关断 toff ,电枢失去电源,经 VD 续流。如此周而复始,则电枢端电压波形如图 3-1( b ) 所示。电机电枢端电压的平均值为:
SSonon
s
offon
onsd UU
Ttt
Utt
tdtUT
U
01
Tt
ttt on
offon
on
为 PWM 的占空比。改变 的值可调压,实现电机调速。
改变占空比的方法
5
PowerPoint 电子演示文稿
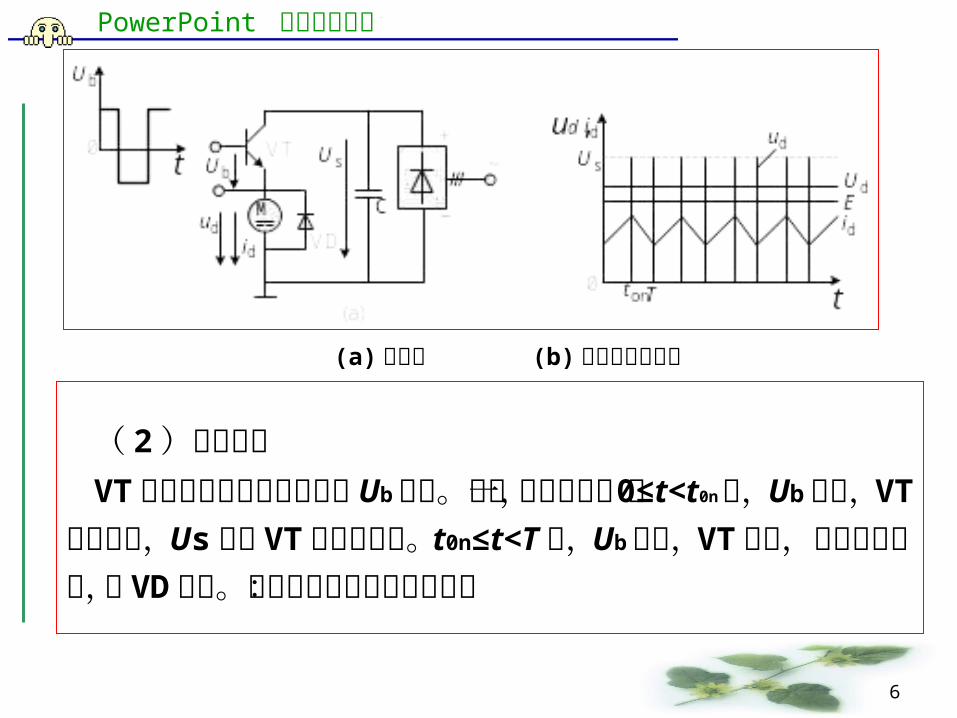
二、脉宽调制变换器 PWM 变换器分:不可逆和可逆两类。 可逆变换器分:双极式、单极式和受限单极式多种。 (一)不可逆 PWM 变换器 1 、无制动作用的 PWM 变换器 ( 1 )电路组成 图 3-2 所示为变换器的主电路原理图。采用全控型的 G
TR 代替半控型的晶闸管,电源电压 Us 为不可控整流电源,采用大电容 C 滤波, VD 在 VT 关断时为电枢提供续流回路。
6
PowerPoint 电子演示文稿
( 2 )工作原理VT 的基极由脉宽可调的电压 Ub驱动。在一个周期内,当
0≤t<t0n时, Ub 为正, VT 饱和导通, Us 通过 VT 加到电枢端。 t0n≤t<T 时, Ub为负, VT 截止,电枢失去电源,经 VD续流。电机得到的平均端电压为:
(a) 原理图 (b) 电压和电流波形
7
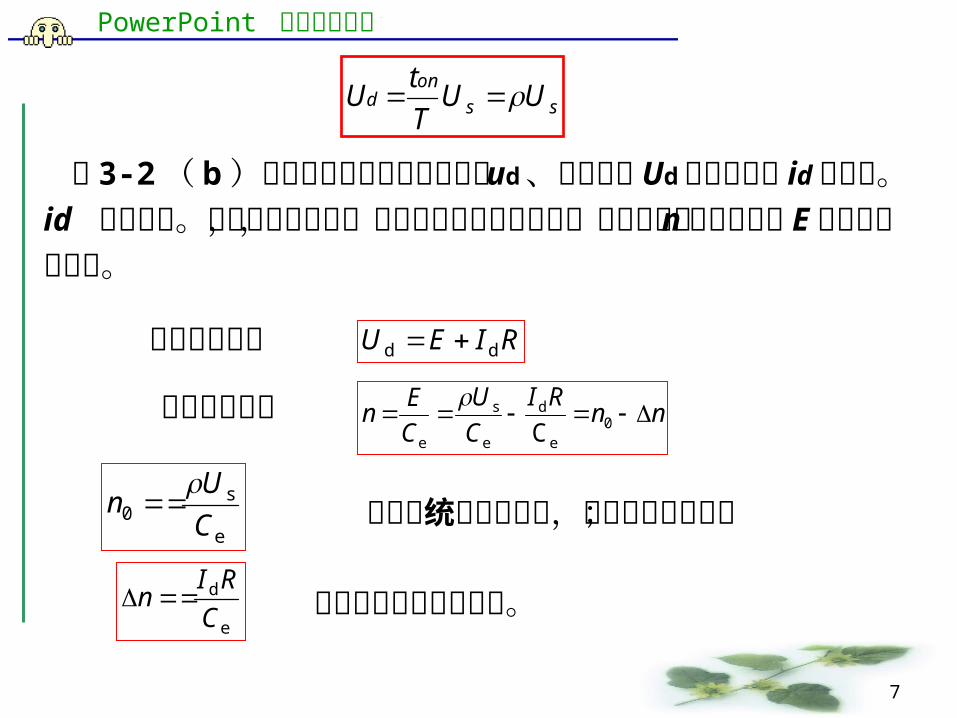
PowerPoint 电子演示文稿ss
ond UU
TtU
图 3-2 ( b )中绘出了电枢的脉冲端电压 ud 、平均电压 Ud
和电枢电流 id 的波形。 id 是脉动的。因开关频率较高,电流脉动幅值不会很大,影响到转速 n 和反电动势 E 的波动就更小了。
电压平衡方程 RIEU dd
机械特性方程 nnRICU
CEn 0
e
d
e
s
e C
e
s0 C
Un
调速系统的空载转速,与占空比成正比;
e
d
CRI
n 负载电流造成的转速降。
8
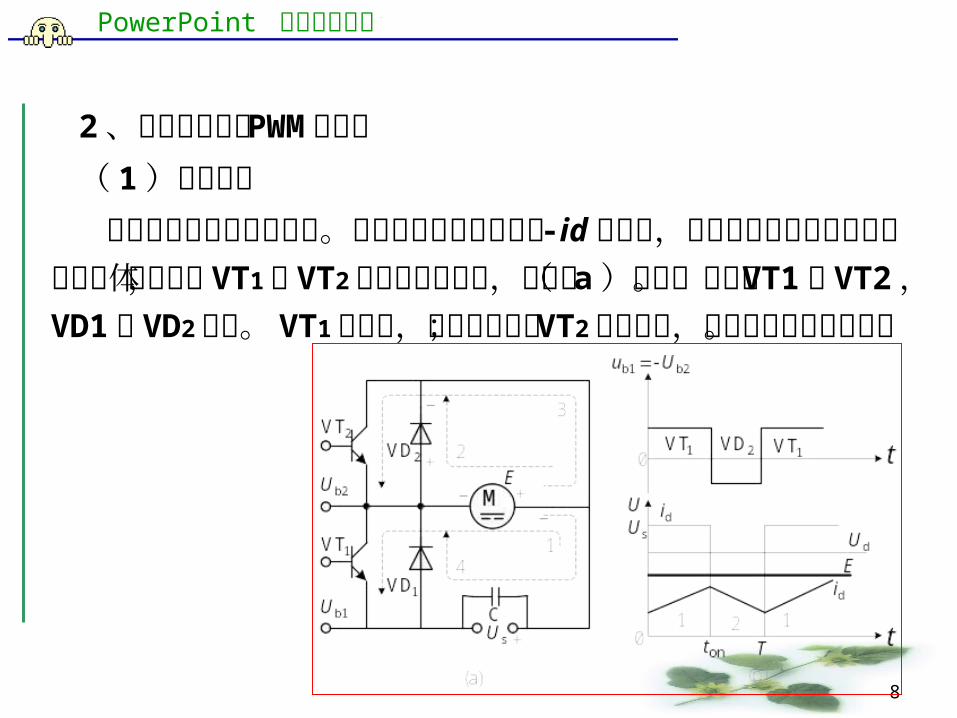
PowerPoint 电子演示文稿2 、有制动作用的 PWM 变换器( 1 )电路组成 不可逆电路不能产生制动。需制动时须有反向电流 -id 的
通路,应设置控制反向的第二个电力晶体管,形成 VT1 和 VT2 交替开关的电路,如图( a )所示。电路由 VT1 和 VT2 ,VD1 和 VD2 组成。 VT1 是主管,起控制作用; VT2 是辅助管,构成电机的制动电路。
Eti
LRiU d
d d1d1s
0d
d d2d2 E
ti
LRi
( 2 )工作原理VT1 和 VT2 的驱动电压 Ub1=-Ub2,电动运行时,正脉冲比负
脉冲宽,平均电流为正值,一个周期内分两段变化。在 0≤t<ton 期间, Ub1 为正, VT1 饱和导通; Ub2 为负, VT
2 截止。 Us 加到电枢两端,电流 id 沿图中的回路 1 流通。有
在 ton≤t<T 期间, Ub1 和 Ub2都变极性, VT1 截止,但 VT2
却不能导通,因 id沿回路 2 经 VD2 续流,在 VD2 两端产生的压降给 VT2施加了反压。实际上是 VT1 、 VD2 交替导通,而VT2 始终不通,其电压和电流波形如图 3-3 ( b )所示。此时,有
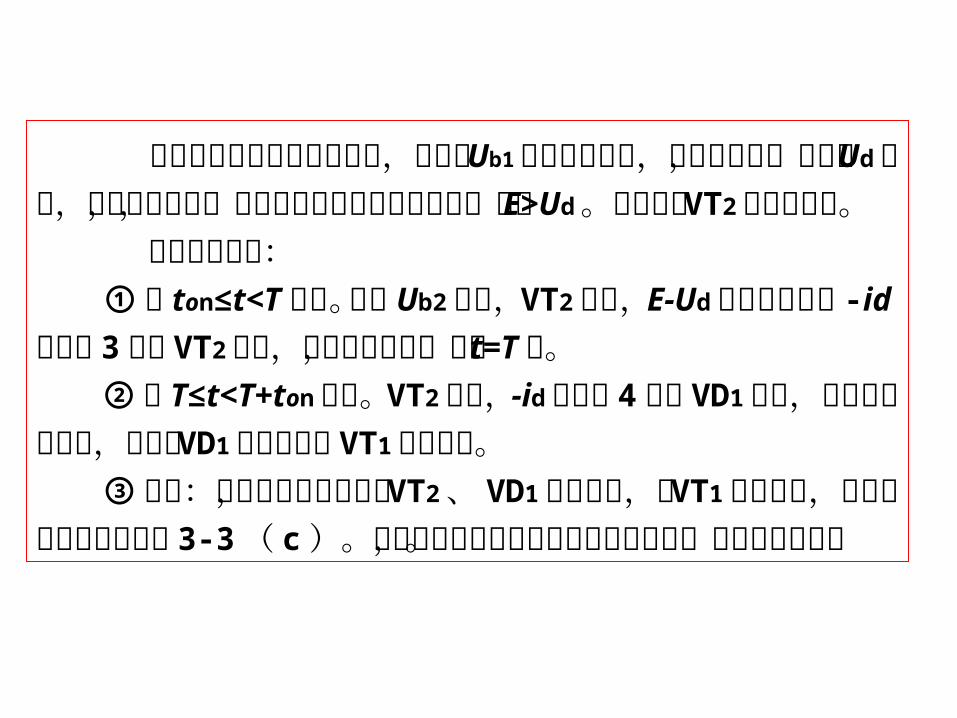
如在电动运行中要降低转速,则应使 Ub1的正脉冲变窄,负脉冲变宽,从而使 Ud 降低,由于惯性作用,转速和反电势还来不及变化,造成 E>Ud 。这时希望 VT2 能发挥作用。 制动过程分析: ①在 ton≤t<T阶段。由于 Ub2 变正, VT2 导通, E-Ud 产
生反向电流 -id沿回路 3 通过 VT2 流通,产生能耗制动,直到t=T 止。 ②在 T≤t<T+ton阶段。 VT2 截止, -id沿回路 4 通过 VD1
续流,对电源回馈制动,同时在 VD1 上的压降使 VT1 不能导通。 ③结论:在整个制动状态中, VT2 、 VD1轮流导通,而
VT1 始终截止,电压和电流波形示于图 3-3 ( c )。反向电流的制动作用使电机转速下降,直到新的稳态。
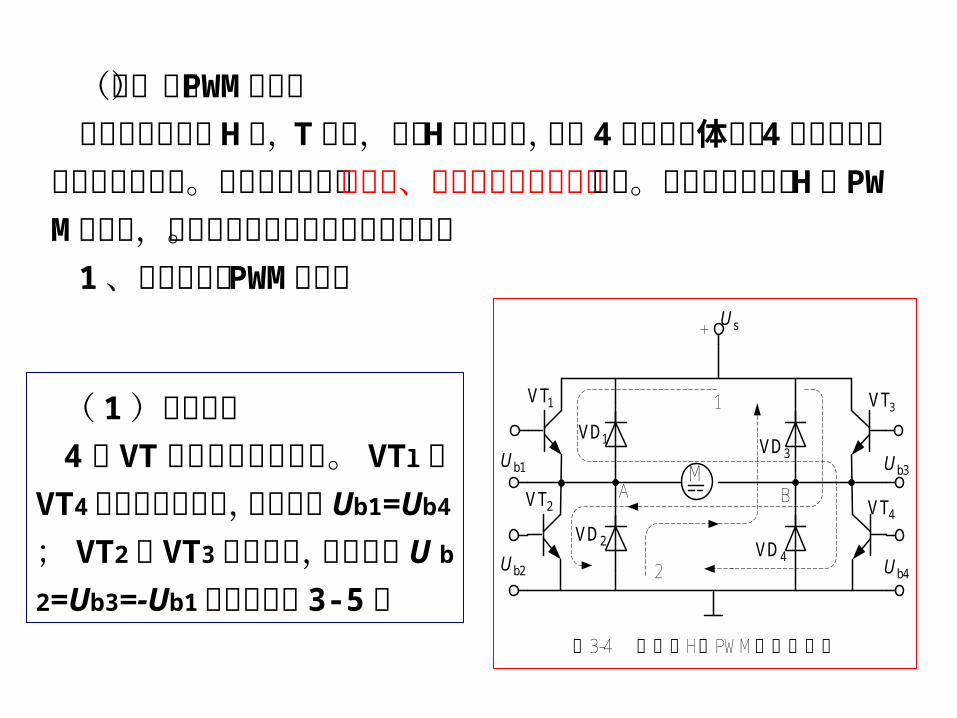
(二)可逆 PWM 变换器 其主电路结构有 H 型, T 型等,常用 H 型变换器,它由
4 个电力晶体管和 4 个续流二极管组成桥式电路。在控制方式上分双极式、单极式和受限单极式三种。着重分析双极式H 型 PWM 变换器,然后再简要说明其它方式的特点。
1 、双极式可逆 PWM 变换器
b1U
b2U
1VT
2VT
1VD
2VD
1
2
A B
4VD
3VDb3U
b4U
4VT
3VT
sU+
图3-4 双极式H型PWM变换器电路
M
( 1 )构成特点4 个 VT 的基极驱动分两组
。 VTl 和 VT4 同时导通和关断,驱动电压 Ub1=Ub4 ; VT2
和 VT3 同时动作,驱动电压U b2=Ub3=-Ub1 。波形于图 3-5。

12
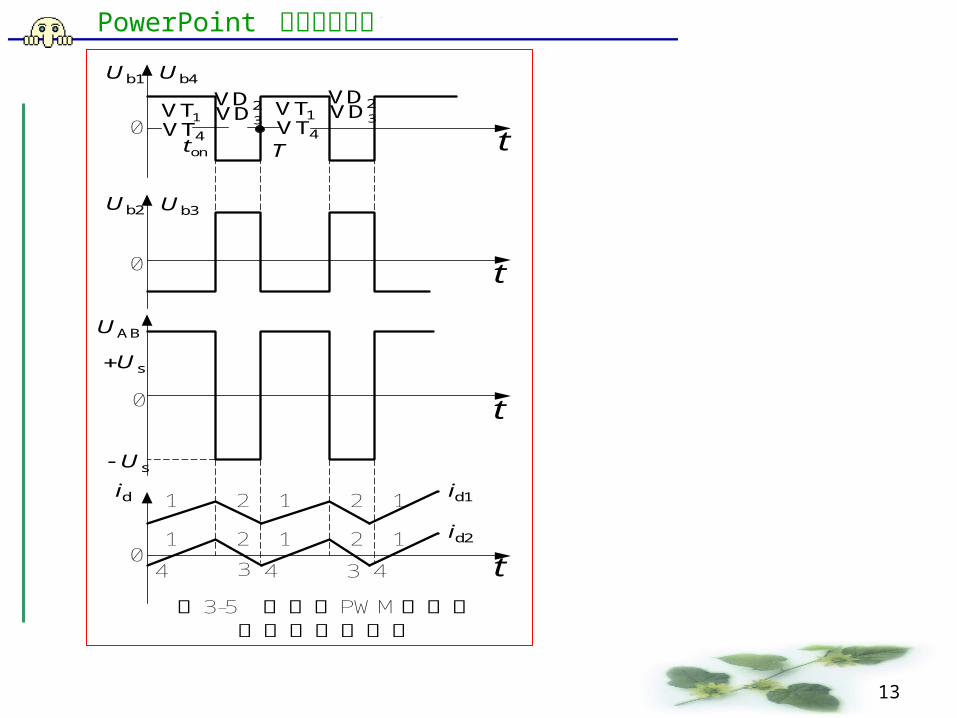
PowerPoint 电子演示文稿( 2 )工作原理①当 0≤t<ton 时, Ub1 和 Ub4 为正,晶体管 VT1 和 VT4 饱
和导通,而 Ub2 和 Ub3 为负, VT2 和 VT3 截止。这时 +Us加在电枢 AB 两端, UAB=US ,电枢电流 id沿回路 1 流通。②当 ton≤t<T 时, Ub1 和 Ub4 变负, VT1 和 VT4 截止;
Ub2 、 Ub3 变正,但 VT2 、 VT3并不能立即导通,因在电枢电感释放储能的作用下, id沿回路 2 经 VD2 , VD3 续流,VD2 、 VD3 上的压降使 VT2 和 VT3 的 c-e 端承受反压,这时 UAB=-US 。 UAB 在一个周期内正负相间,双极式 PWM变换器的特征,其电压、电流波形示于图 3-5 。
13
PowerPoint 电子演示文稿
0
0
t
ABU
sU
sU
di d1i
td2i
1 2
34
1 2
34
1
1 2 1 2 1
4
b1U
b2U
1VT 2VDb4U
0
0
4VT3VD
ont T t1VT 2VD
4VT 3VD
b3U
t
图3-5 双极式PWM变换器电压和电流波形
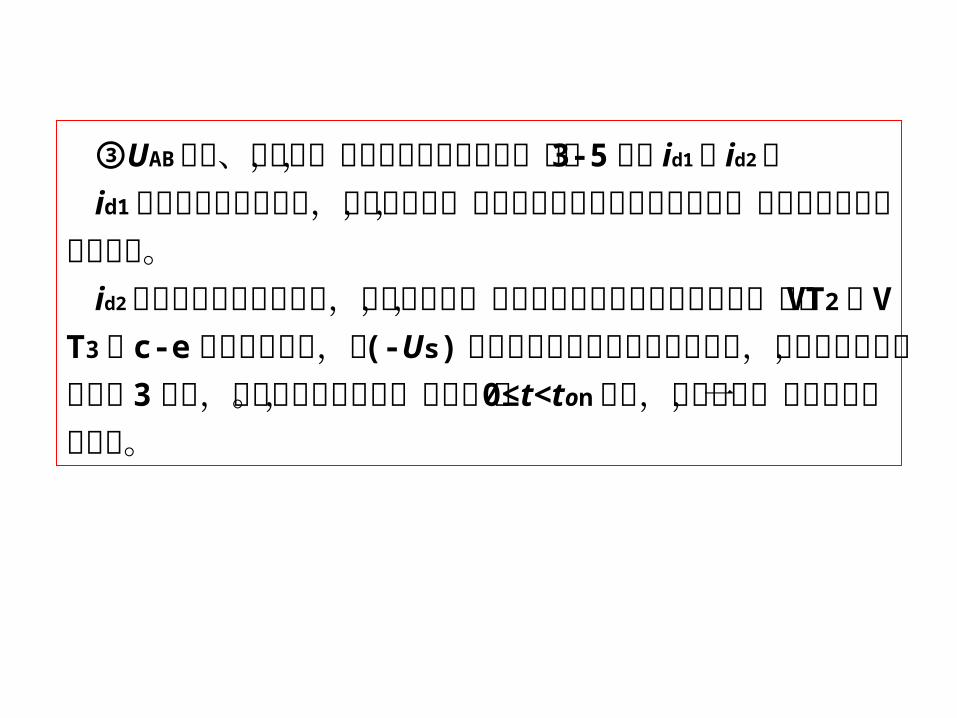
③UAB 的正、负变化,使电流存在两种情况,如图 3-5 中的 id1和 id2。
id1 相当于负载较重情况,平均电流大,在续流阶段电流仍维持正方向,电机始终工作在电动状态。
id2 相当于负载很轻的情况,平均电流小,在续流阶段电流很快衰减到零,于是 VT2 和 VT3 的 c-e 两端失去反压,在 (-Us) 和电枢反电势的合成作用下导通,电枢电流反向,沿回路 3 流通,电机处于制动状态。同理,在 0≤t<ton 期间,负载轻时,电流也有一次倒向。
15
PowerPoint 电子演示文稿 ④结论:双极式可逆 PWM 变换器的电流波形和不可逆但有制动电流通路的 PWM 变换器差不多。 怎样才能反映出“可逆”的作用呢?这要视正、负脉冲电压的宽窄而定。 当正脉冲较宽时, ton>T/ 2 ,则电枢两端的平均电压为正,电机正转。 当正脉冲较窄时, ton<T/ 2 ,平均电压为负,电机反转。 当正、负脉冲宽度相等, ton=T/ 2 ,平均电压为零,电动机停止。 图 3-5 所示的电压、电流波形都是在电动机正转时的情况。
16
PowerPoint 电子演示文稿
双极式 PWM 变换器的优点如下: (1) 电流一定连续; (2) 可使电机在四象限运行; (3) 电机停止时有微振电流,能消除静摩擦死区; (4) 低速时,每个晶体管的驱动脉冲仍较宽,有利于保证晶体管可靠导通。 (5) 低速平稳性好,调速范围可达 20000左右。 双极式 PWM 变换器的缺点: 在工作过程中 4 个晶体管都处于开关状态,损耗大,易发生上、下两管直通事故。为防止上、下两管直通,在一管关断和另一管导通的驱动脉冲之间,应设置逻辑延时。
2 、单极式可逆 PWM 变换器 为克服双极式变换器的缺点,可采用单极式 PWM 变换器。
其电路和双极式同,不同之处在于驱动脉冲信号。 在单极式 PWM 中,左边两个管子的驱动脉冲 Ub1=-Ub2 ,
有和双极式一样的正负交替脉冲,使 VT1 和 VT2 交替导通。右边两管 VT3 和 VT4 的驱动信号则不同,改成因电机的转向而施加不同的直流控制信号。 当电机正转时,使 Ub3 恒为负, Ub4 恒为正,则 VT3 截止
而 VT4常通。电机反转时,则 Ub3 恒为正而 Ub4 恒为负,使 VT3常通而 VT4截止。负载较重时各管的开关情况和电枢电压的状况列于表 3-1 中,
同时列出双极式变换器的情况以资比较。负载较轻时,电流在一个周期内也会来回变向,各管导通和截止的变化还要多些。
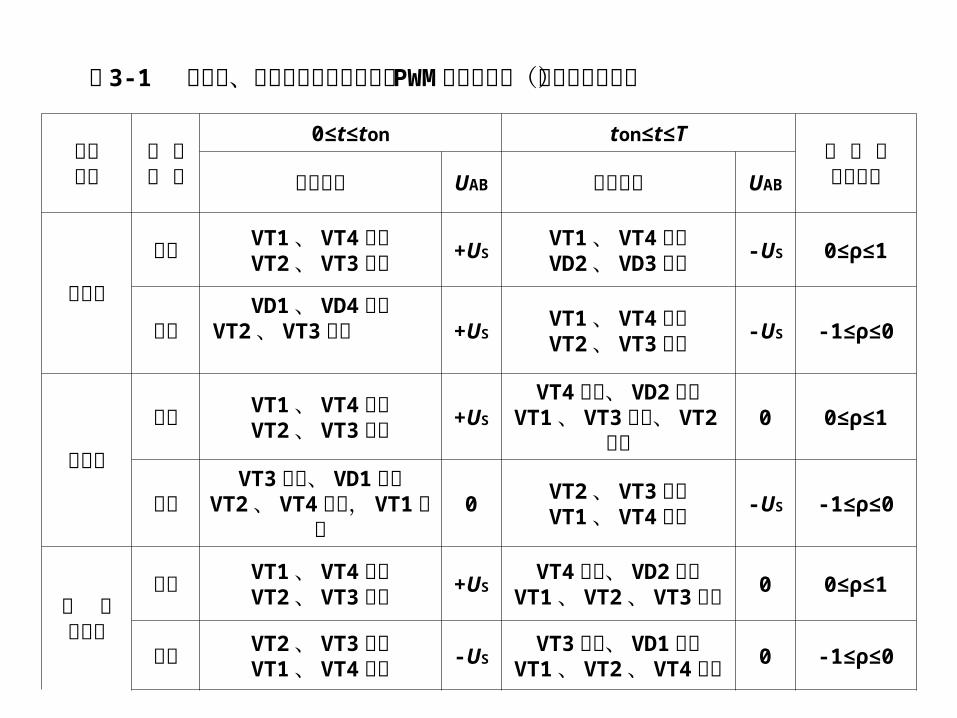
表 3-1 双极式、单极式和受限单极可逆 PWM 变换器比较(当负载较重时)
控制方式电 机转 向
0≤t≤ton ton≤t≤T
占 空 比调节范围开关状况 UAB 开关状况 UAB
双极式正转 VT1 、 VT4 导通
VT2 、 VT3 截止 +USVT1 、 VT4 截止VD2 、 VD3 续流 -US 0≤ρ≤1
反转 VD1 、 VD4 续流VT2 、 VT3 截止 +US
VT1 、 VT4 截止VT2 、 VT3 导通 -US -1≤ρ≤0
单极式正转 VT1 、 VT4 导通
VT2 、 VT3 截止 +US
VT4 导通、 VD2 续流VT1 、 VT3 截止、 V
T2 不通 0 0≤ρ≤1
反转 VT3 导通、 VD1 续流VT2 、 VT4 截止, VT
1 不通 0 VT2 、 VT3 导通VT1 、 VT4 截止 -US -1≤ρ≤0
受 限单极式正转 VT1 、 VT4 导通
VT2 、 VT3 截止 +US
VT4 导通、 VD2 续流VT1 、 VT2 、 VT3 截止 0 0≤ρ≤1
反转 VT2 、 VT3 导通VT1 、 VT4 截止 -US
VT3 导通、 VD1 续流VT1 、 VT2 、 VT4 截止 0 -1≤ρ≤0

表 3-1 中,单极式变换器的 UAB表明,在电机朝一个方向旋转时, PWM 变换器只在一个阶段中输出某一极性的脉冲电压,在另一阶段中 UAB=0 ,故称作“单极式”变换器。为此,其输出电压波形与不可逆 PWM 变换器一样,见图 3-3 ( b )和式 (3-1) 。 由于单极式变换器的 VT3 和 VT4 二者中总有一个常通,一个常截止,运行中无须频繁交替导通。和双极式变换器相比开关损耗可减少,装置的可靠性提高。
单极式变换器开关损耗和可靠性比双极式好,但仍存在 VT1 和 VT2 交替导通和关断时电源直通的危险。研究一下表 3-1中各晶体管的状况,可发现,当电机正转时,在 0≤t<ton 期间,VT2 截止,在 ton≤t<T 期间由于 VD2 续流, VT2也不通。
21
PowerPoint 电子演示文稿 受限单极式变换器 在电机正转时, Ub2恒为负, VT2 一直截止;在电机
反转时, Ub1 恒为负, VTl 一直截止,其它驱动信号和一般单极式相同。 如果负载较重,电流 id在一个方向内连续变化,所有
的电压、电流波形都和一般单极式变换器一样。 当负载较轻时,由于有两个晶体管一直处于截止状态,
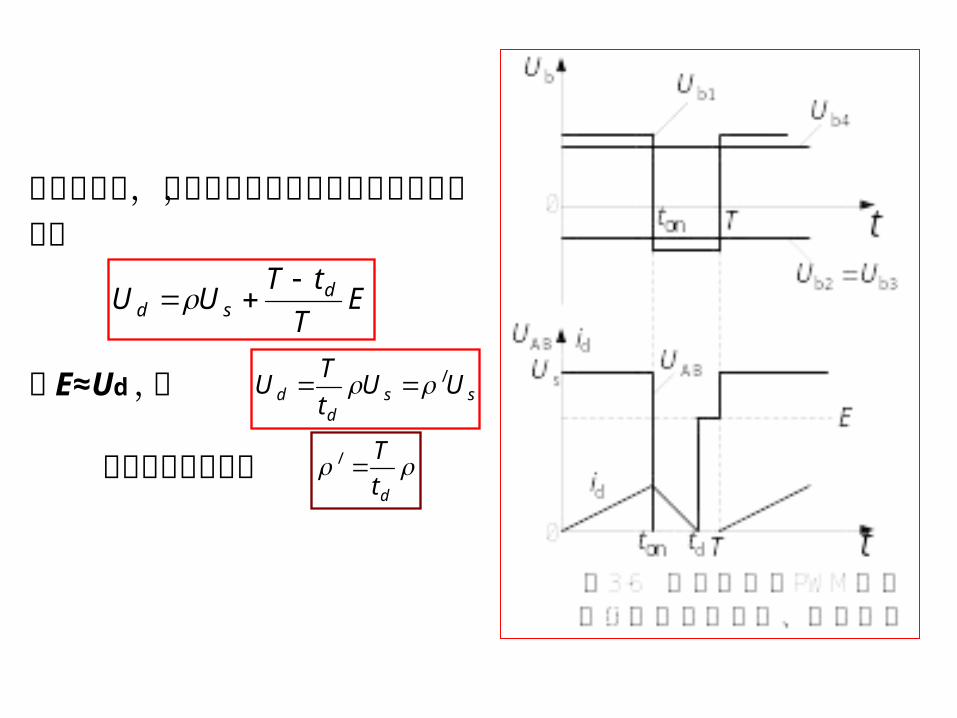
不会出现电流变向,在续流期间电流衰减到零时 (t=td) ,波形中断,电枢两端电压跳变到 UAB=E ,如图 3-6 所示。其电流断续现象使变换器的外特性变软。使 PWM 调速系统的静、动态性能变差,但不会产生 VT1 、 VT2 直通的故障。系统的可靠性提高。
ETtT
UU dsd
ssd
d UUtTU /
dtT
/
电流断续时,电枢电压的提高把平均电压抬高,成为
令 E≈Ud ,则新的负载电压系数
)(0 dd
ond
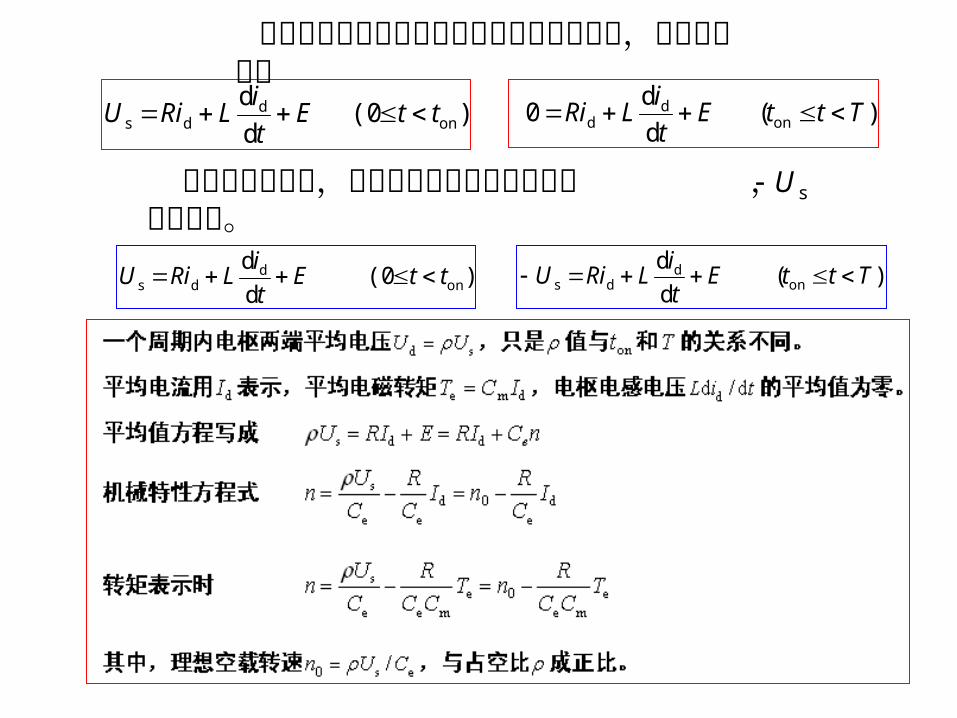
ds ttEtiLRiU )(
dd0 on
dd TttE
tiLRi
sU
)(0 dd
ond
ds ttEtiLRiU )(
dd
ond
ds TttEtiLRiU
有制动能力的不可逆电路和单极式可逆电路,电压方程式为双极式可逆电路,将第二个方程中的电源改为 ,其余不变。
24
PowerPoint 电子演示文稿
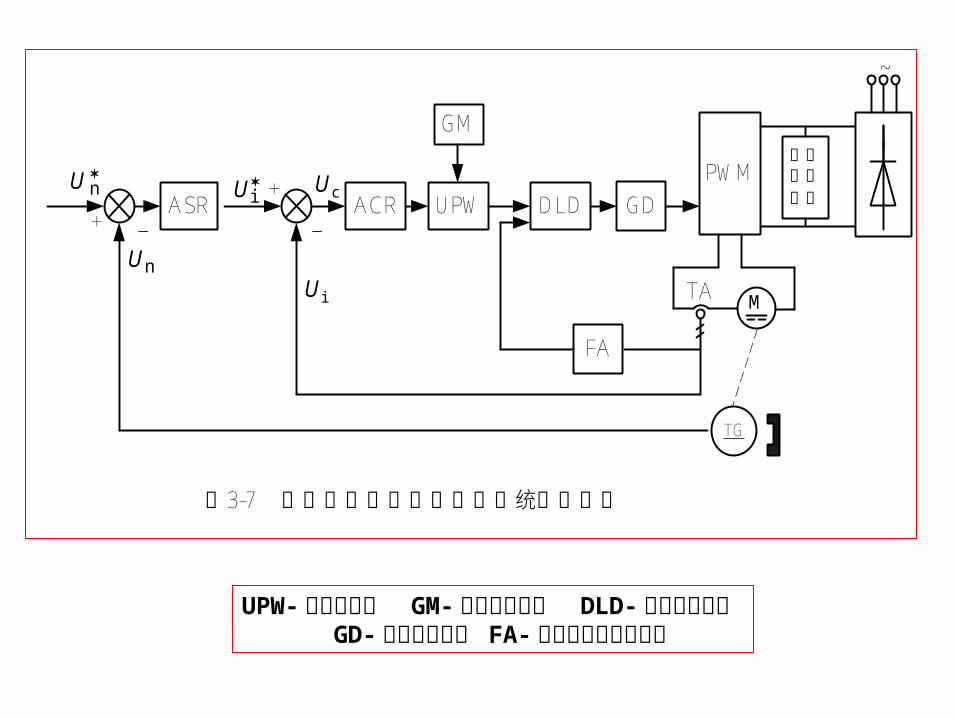
第三节 PWM-M 直流调速系统一、 PWM-M 直流调速系统的控制电路PWM 变换器是调速系统的主电路,是对已有的 PWM 波
形的电压信号 Ub1~Ub4进行功放,并不改变信号的 PWM 波性质。而 PWM 电压波形的产生、分配则是 PWM 变换器控制电路的功能。为此,由 GTR 构成的脉宽调速系统还必须具备相应的控制电路。图 3-7 为双闭环脉宽调速控制系统的原理框图。其中属于脉宽调速系统特有的环节有脉宽调制器 UPW 、调制波发生器 GM 、逻辑延时环节 DLD 和电力晶体管的基极驱动器 GD 。
ASR ACR
M
TG
nU
nU-
iU
iU
+ -+
UPW
GM
DLD GDcU
PWM泵制升电限路
~
FA
TA
图3-7 双闭环控制的脉宽调速系统原理框图
UPW- 脉宽调制器 GM- 调制波发生器 DLD-逻辑延时环节 GD- 基极驱动电路 FA-瞬时动作的限流保护
(一)锯齿波脉宽调制器( UPW-GM ) 脉宽调制器是一个电压 - 脉冲变换装置,由 ACR 的
输出电压 Uc 控制,将输入的直流控制信号转换成与之成比例的方波脉冲电压信号,对电力晶体管进行控制,从而得到希望的方波输出电压。常用的脉宽调制器有下列几种:( 1 )用锯齿波作调制信号的脉宽调制器;( 2 )用三角波作调制信号的脉宽调制器;( 3 )用多谐振荡器和单稳态触发器组成的脉宽调制器;( 4 )数字式脉宽调制器。
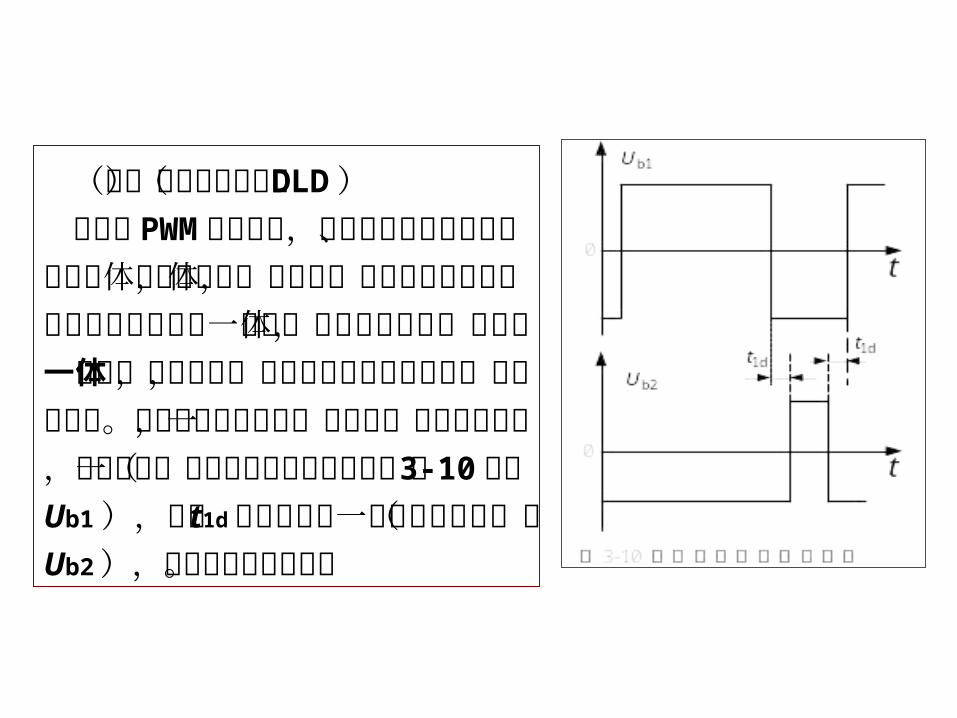
(二)逻辑延时环节( DLD )在可逆 PWM 变换器中,跨接在
电源两端的上、下两晶体管交替工作,由于晶体管存在关断时间,如果在这段时间内一个晶体管未完全关断,此时另一个晶体管已导通,则将造成上下两管直通,使电源短路。为避免发生此情况,应设置一逻辑延时环节,保证在对一个管子发出关闭脉冲后(图 3-10 中的 Ub1
),延时 t1d再发出对另一管的开通脉冲(如 Ub2 ),避免两管同时导通。
28
PowerPoint 电子演示文稿
(三)限流保护环节( FA ) 在逻辑延时环节中还可引入保护信号,例如瞬时动作
的限流保护信号 (见图 3-7 中的 FA) ,一旦桥臂电流超过允许最大电流时,使 VT1 、 VT4(或 VT2 、 VT3) 两管同时封锁,以保护电力晶体管。 (四)脉冲分配电路 它根据电力晶体管 PWM 的导通次序,对经延时后的
脉宽调制信号进行适当的逻辑变换,分配给基极驱动电路,以满足功率转换电路工作所要求的“通”、“断”时序的脉冲电压,使晶体管能按照指定的顺序“通”、“断”,保证系统正常工作。
(五)基极驱动电路 基极驱动电路的作用是对脉冲分配电路提供的脉冲号进行功率放大,以驱动主电路的电力晶体管,每个晶体管应有独立的基极驱动电路。为了确保晶体管在开通时能迅速达到饱和导通,关断时能迅速截止,正确设计基极驱动电路是非常重要的。首先,由于各驱动电路是独立的,但控制电路共用,因此必须使控制电路与驱动电路互相隔离,常用光电耦合器实现这一隔离作用。 其次,正确的 GTR 驱动电流波形如图 3-11 所示,每一
开关过程包含三个阶段,即开通、饱和导通和关断。

正确的 GTR 驱动电流波形如图 3-11 所示,每一开关过程包含开通、饱和导通和关断三个阶段。
1 、开通阶段为使晶体管在任何情况下开通时都能饱和导通,避免晶体管
在开通瞬间因基流不足而退出饱和区,导致正向击穿。必须引入加速开通电路,即在基极电流 Ib1 的基础上再增加一个强迫驱动分量 ΔIb1 ,强迫驱动的时间取决于续流二极管的反向恢复时间。
bI
0t
b1I
b1I
~ ~
b2I
图3-11 开关晶体管要求的基极电流信号
2 、饱和导通阶段 此阶段的基极电流 Ib1决定于在输出最大集电极电流时能饱和导通,只要比这时的临界饱和基极电流 Ibs 大些就行了。 3 、关断阶段 由于晶体管导通时处于饱和状态,因此在关断时有大量存贮电荷,导致关断时间延长。为了加速关断过程,必须在基极加上负的偏压,以便抽出基区剩余电荷,这样就形成负的基极电流 -Ib2 。在晶体管关断后,负偏压能使它可靠地截止,但负偏压也不宜过大,只要以形成最佳的 dIb2/dt 为宜。

二、 PWM-M 直流调速系统图 3-12 为双极式 PWM-M 双闭环可逆调速系统原理图。