

Webinar1 darpa07
50
Self-Driving Car Webinar #1 ARCHITECTURE BREAKDOWN OF RACING VEHICLES IN THE DARPA 2007 URBAN CHALLENGE
-
Upload
mkgjuice -
Category
Automotive
-
view
240 -
download
1
Transcript of Webinar1 darpa07

Self-Driving Car Webinar#1 ARCHITECTURE BREAKDOWN OF RACING VEHICLES IN
THE DARPA 2007 URBAN CHALLENGE

Mengchen Ma
Postgraduate student at EBS University, Germany, Class of 2015
M.Sc. in Automotive Management/ B.Sc. in Automotive Engineering
Previous: Roland Berger (Shanghai), Opel (Germany)
Focus Area: Self-Driving Car, Car Sharing

OverviewA. The DARPA 2007 Urban ChallengeB. Talos (MIT)C. Boss (CMU)D. Junior (Stanford U.)E. Summary
A. The DARPA 2007 Urban Challenge

Before 2007 Urban ChallengeDGC 2004 DGC 2005
No team travelled more than 7.4 miles Five teams completed the race

Finished
Final
NQE
Site Visit
Registered
6
11
35
53
89
2007 Urban Challenge Result1st PlaceBoss
2nd PlaceJunior
4th PlaceTalos

B. Talos (MIT)

Overall Architecture
Navigator
Drivability MapMotion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint DetectionLanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
Perc
eptio
n
CamerasCameras
RadarsRadars
SICKSICK
Sens
ors
Planning &
Control

Overall Architecture
Navigator
Drivability MapMotion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint DetectionLanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
CamerasCameras
RadarsRadars
SICKSICK
Sens
ors
Planning &
Control

Overall Architecture
Navigator
Drivability MapMotion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint DetectionLanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
CamerasCameras
RadarsRadars
SICKSICKPlanning
& Control

Overall Architecture
Navigator
Drivability MapMotion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint DetectionLanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
CamerasCameras
RadarsRadars
SICKSICK

Overall Architecture
Navigator
Drivability MapMotion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint DetectionLanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
CamerasCameras
RadarsRadars
SICKSICK

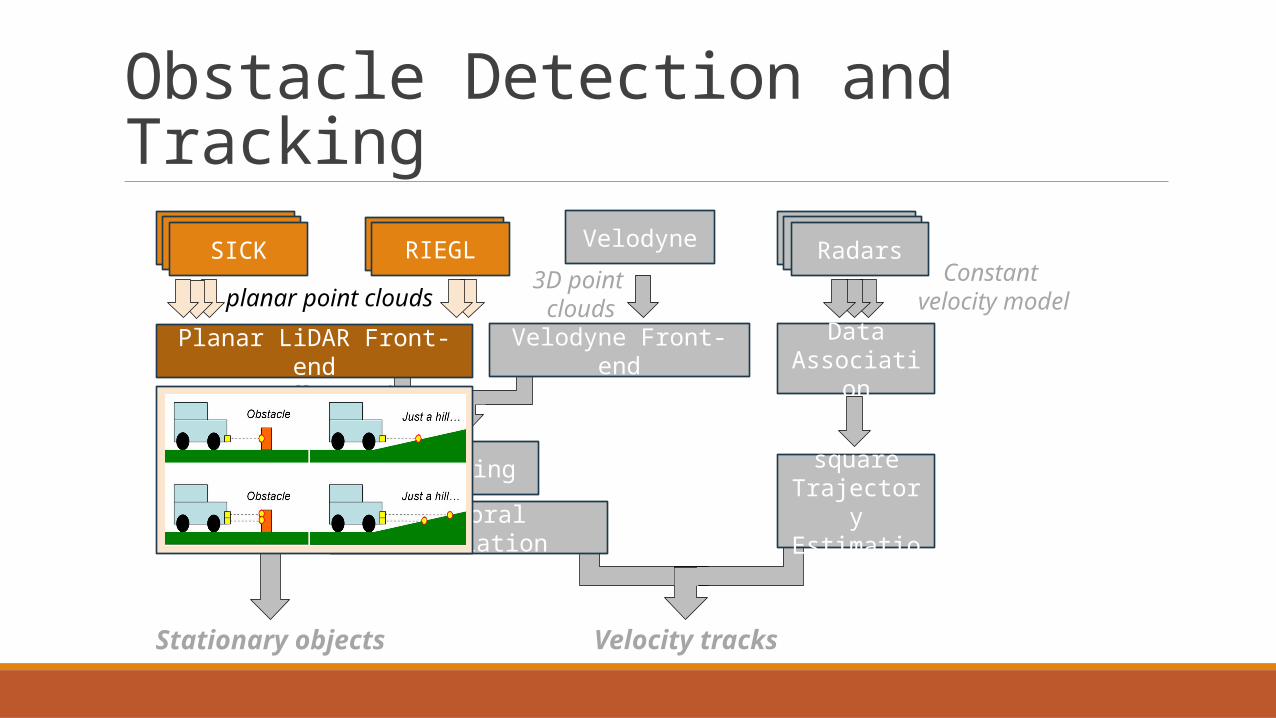
Obstacle Detection and TrackingSICK VelodyneSICKSICK SICKSICKRadarsSICKRIEGL
Data Association
Velodyne Front-endPlanar LiDAR Front-end
Spatial Clustering
Temporal Association
Least-square Trajectory Estimation
Stationary objects Velocity tracks
planar point clouds3D point
clouds
Off-ground point detections
Constant velocity model

Obstacle Detection and TrackingSICK VelodyneSICKSICK SICKSICKRadarsSICKRIEGL
Data Association
Velodyne Front-endPlanar LiDAR Front-end
Spatial Clustering
Temporal Association
Least-square Trajectory Estimation
Stationary objects Velocity tracks
planar point clouds3D point
clouds
Off-ground point detections
Constant velocity model
Obstacle Detection and TrackingSICK VelodyneSICKSICK SICKSICKRadarsSICKRIEGL
Data Association
Velodyne Front-endPlanar LiDAR Front-end
Spatial Clustering
Temporal Association
Least-square Trajectory Estimation
Stationary objects Velocity tracks
planar point clouds3D point
clouds
Off-ground point detections
Constant velocity model

Obstacle Detection and TrackingSICK VelodyneSICKSICK SICKSICKRadarsSICKRIEGL
Data Association
Velodyne Front-endPlanar LiDAR Front-end
Spatial Clustering
Temporal Association
Least-square Trajectory Estimation
Stationary objects Velocity tracks
planar point clouds3D point
clouds
Off-ground point detections
Constant velocity model

Obstacle Detection and TrackingSICK VelodyneSICKSICK SICKSICKRadarsSICKRIEGL
Data Association
Velodyne Front-endPlanar LiDAR Front-end
Spatial Clustering
Temporal Association
Least-square Trajectory Estimation
Stationary objects Velocity tracks
planar point clouds3D point
clouds
Off-ground point detections
Constant velocity model

Overall Architecture
Navigator
Drivability MapMotion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint Detection
Lanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
CamerasCameras
RadarsRadars
SICKSICK
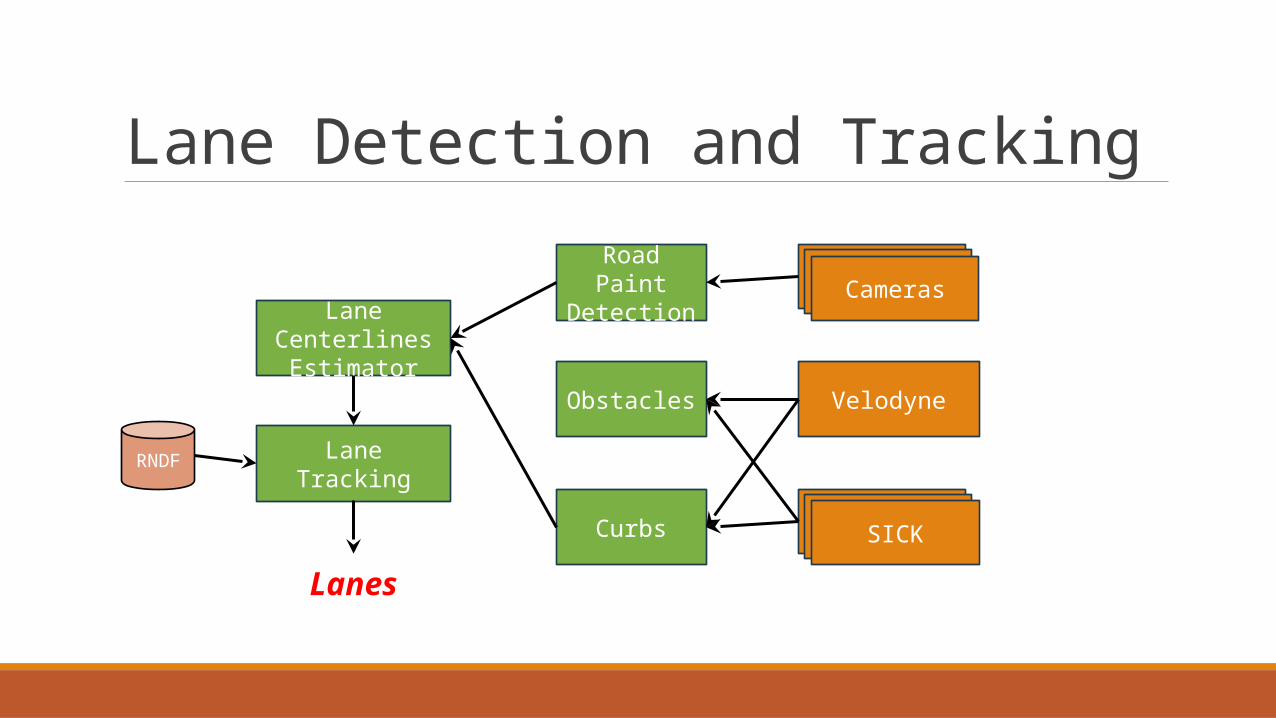
Lane Detection and Tracking
SICK
Velodyne
SICKSICK
SICKSICKCamerasRoad Paint Detection
Obstacles
Curbs
Lane Centerlines Estimator
Lane TrackingRNDF
Lanes

Lane Detection and Tracking
SICK
Velodyne
SICKSICK
SICKSICKCamerasRoad Paint Detection
Obstacles
Curbs
Lane Centerlines Estimator
Lane TrackRNDF
Lanes

Lane Detection and Tracking
SICK
Velodyne
SICKSICK
SICKSICKCamerasRoad Paint Detection
Obstacles
Curbs
Lane Centerlines Estimator
Lane TrackingRNDF
Lanes

Lane Detection and Tracking
SICK
Velodyne
SICKSICK
SICKSICKCamerasRoad Paint Detection
Obstacles
Curbs
Lane Centerlines Estimator
Lane TrackingRNDF
Lanes

Overall Architecture
Navigator
Drivability MapMotion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint Detection
Lanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
CamerasCameras
RadarsRadars
SICKSICK
The Navigator is responsible for planning the high-level behavior of the vehicle including:• Shortest route to the next MDF checkpoint• Intersection precedence, crossing, and merging• Passing• Blockage replanning• Generation of the goal for the Motion Planner• Generation of the failsafe timers• Turn signaling

Overall Architecture
Navigator
Drivability Map
Motion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint Detection
Lanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
CamerasCameras
RadarsRadars
SICKSICK

Overall Architecture
Navigator
Drivability MapMotion Planner
Controller
Fast Vehicles
Hazards
Obstacles
Road Paint Detection
Lanes
Vehicle Positioning
Radars
SICK
Velodyne
Cameras
IMU, GPS, Odometry
MDF RNDF
CamerasCameras
RadarsRadars
SICKSICK
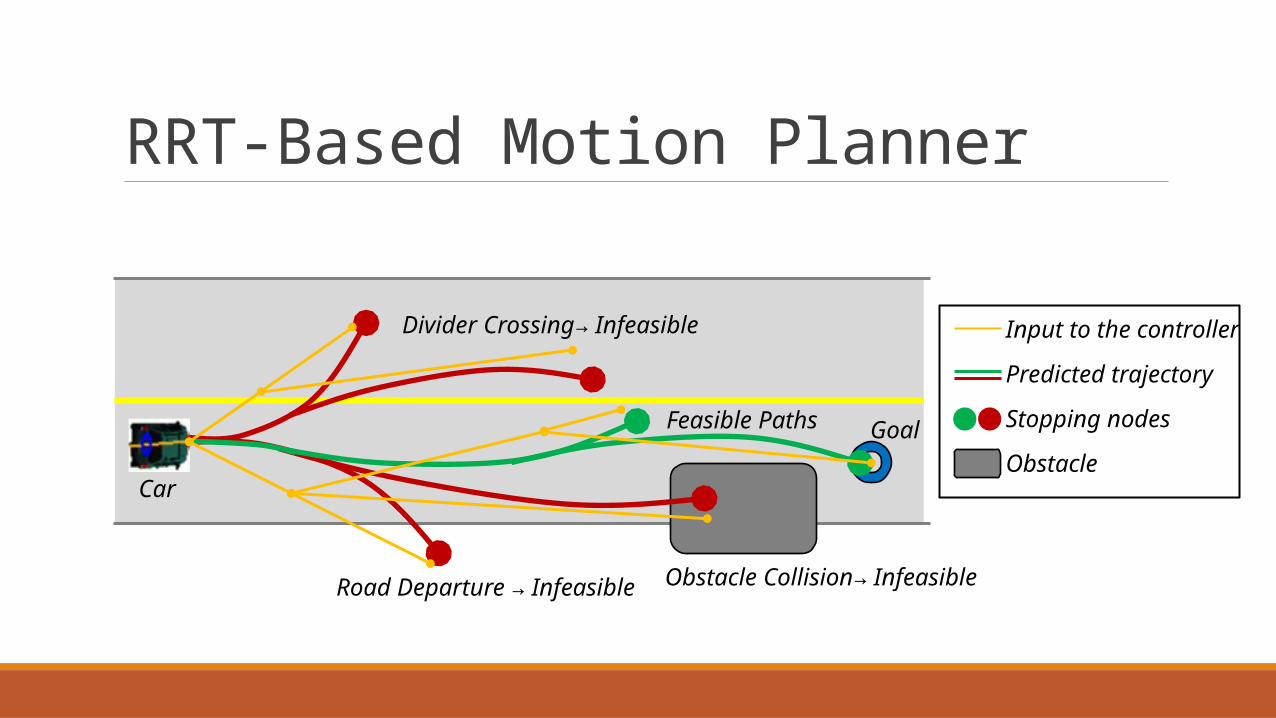
RRT-Based Motion Planner
Input to the controller
Predicted trajectory
Stopping nodes
Obstacle
Road Departure → Infeasible
Divider Crossing→ Infeasible
Obstacle Collision→ Infeasible
Feasible Paths Goal
Car

C. Boss (CMU)
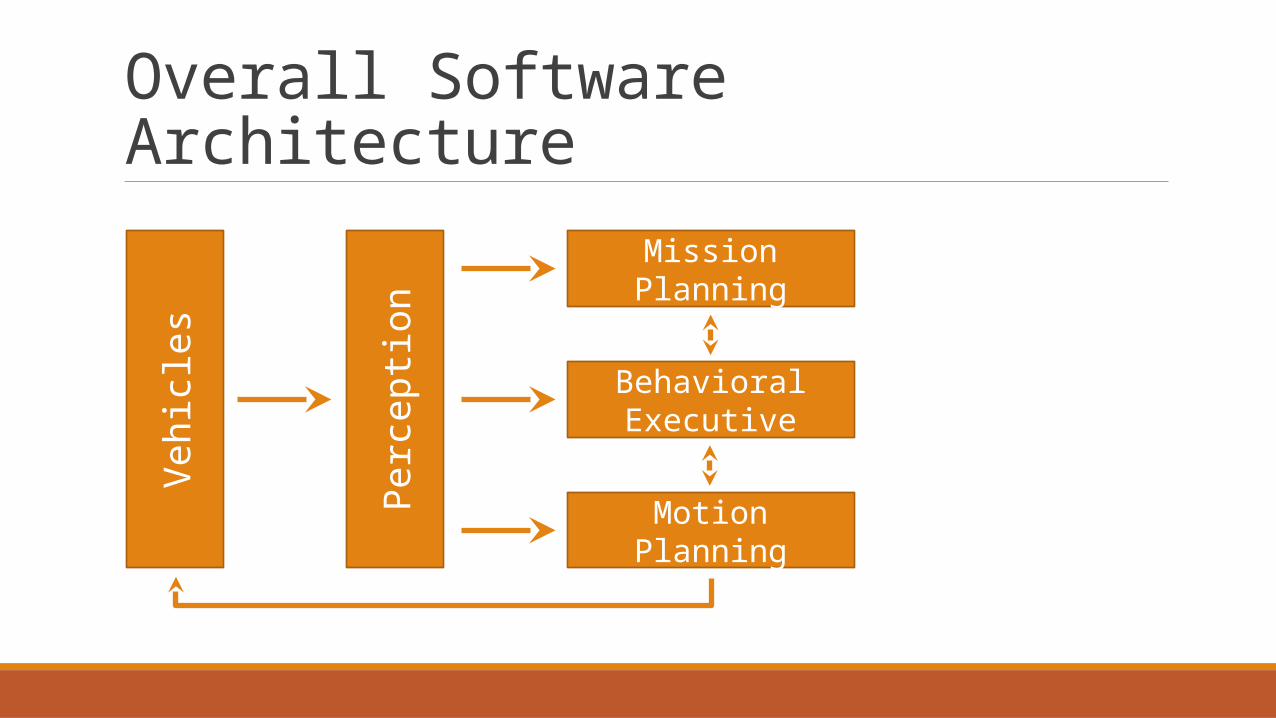
Overall Software ArchitectureVe
hicl
es
Perc
eptio
n
Mission Planning
Behavioral Executive
Motion Planning

Overall Software ArchitectureVe
hicl
es
Perc
eptio
n
Mission Planning
Behavioral Executive
Motion Planning

Perception —Sensor SetupSensor Type Amount Max.
RangeVertical Angle
Horizontal Angle Returned Feature
Continental ARS 300
Scanning Radar(near/far
)5 60/200m 4.3° 56°/18° 2D position, 2D velocity
Continental ISF172
Fixed Beam Laser 2 150m 4° 14° 2D position
SICK LMS291
Scanning Laser, 1 level 6 80m 0.25° 180° Edge Target, 2D position
IBEO Alasca XT
Scanning Laser, 4 level 2 200m 3.2° 240° Edge Target, 2D position
Velodyne HDL-64E
Scanning Laser, 64 beam 1 120m 26.8° 360° Edge Target, 2D position,
Obstacle Maps

Perception —Sensor Setup

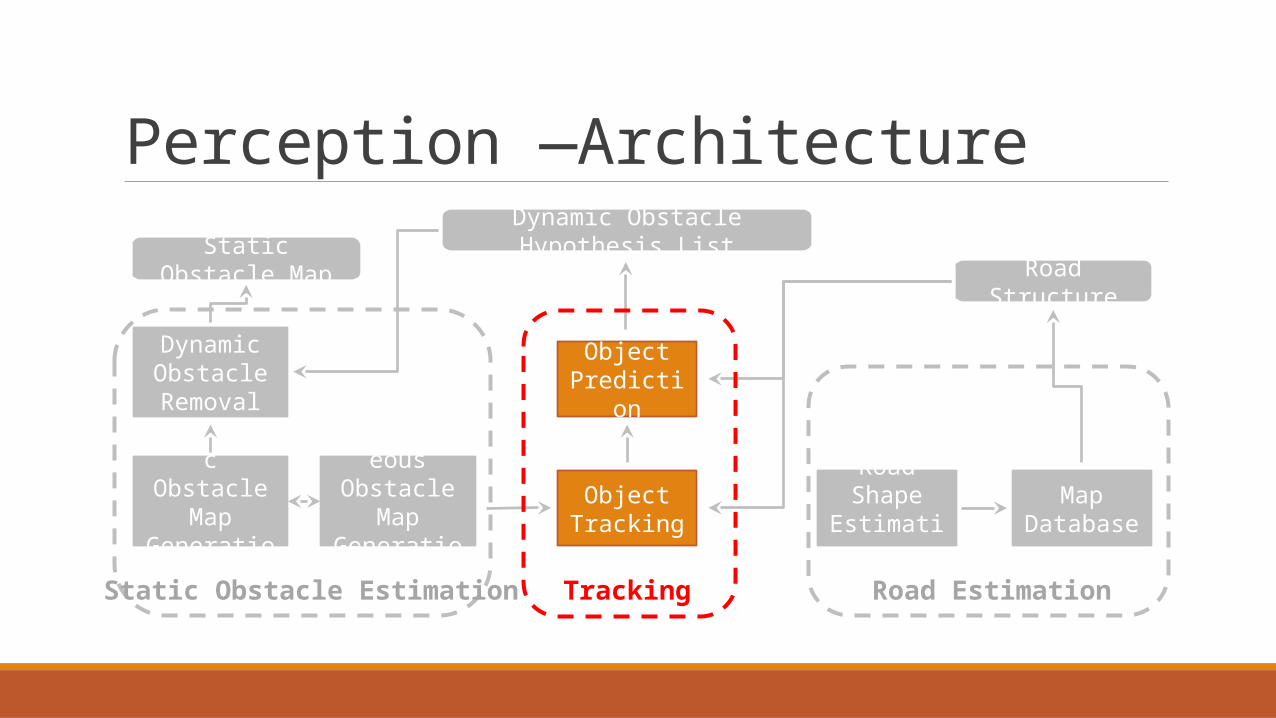
Perception —Architecture
Dynamic Obstacle Removal
Instantaneous Obstacle
Map Generation
Object Prediction
Hysteretic Obstacle Map
GenerationObject
TrackingRoad Shape Estimation
Map Database
Static Obstacle MapDynamic Obstacle Hypothesis List
Road Structure
Static Obstacle Estimation Tracking Road Estimation
Perception —Architecture
Dynamic Obstacle Removal
Instantaneous Obstacle
Map Generation
Object Prediction
Hysteretic Obstacle Map
GenerationObject
TrackingRoad Shape Estimation
Map Database
Static Obstacle MapDynamic Obstacle Hypothesis List
Road Structure
Static Obstacle Estimation Tracking Road Estimation

Tracking Subsystem —Architecture
Sensor LayerLocal Classification & Proposal Generation
AssociationLocal Feature Validation
Feature Extraction
Fusion LayerObject/List Management Global Feature ValidationEstimation & Prediction Check Against
Road StructureModel SelectionGlobal Classification
Dynamic Obstacle Hypothesis ListRoad Structure &Instantaneous Map
FeaturesValidatedFeatures
Measurement(Observations, Proposals,Movement Observations)
Sensor LayerLocal Classification & Proposal Generation
AssociationLocal Feature Validation
Feature Extraction
Sensor LayerLocal Classification & Proposal Generation
AssociationLocal Feature Validation
Feature Extraction
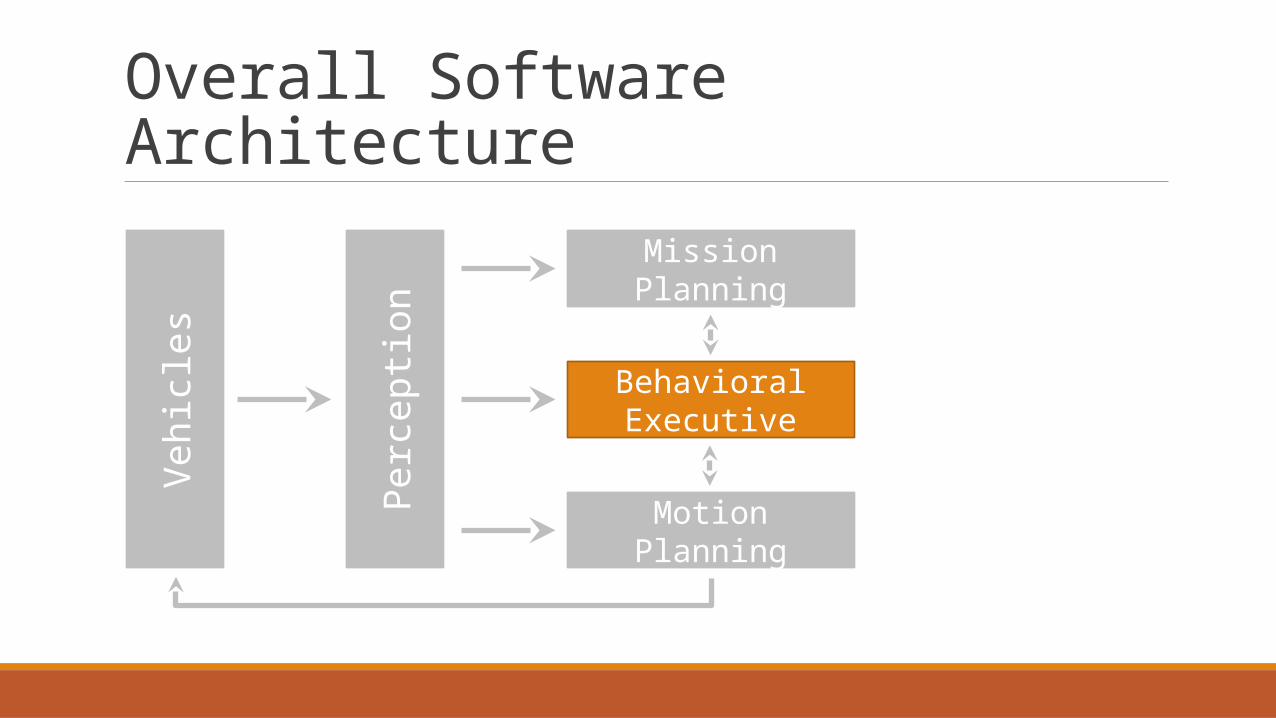
Overall Software ArchitectureVe
hicl
es
Perc
eptio
n
Mission Planning
Behavioral Executive
Motion Planning

Behavioral Executive—Architecture
Transition Manager
Precedence Estimator
Vehicle Driver
Current Scene Reporter
State Estimator
Goal Selector
Lane Driving
Lane Selector
Distance Keeper
Merge Planner
Goal Selection
Intersection Handling
Data in from System
Data out to System

Behavioral Executive—Goal Selection
Precedence Estimator
Vehicle Driver
Current Scene Reporter
State Estimator
Goal Selector
Lane Driving
Lane Selector
Distance Keeper
Merge Planner
Goal Selection
Data in from System
Data out to System
Transition Manager
Intersection Handling

Behavioral Executive—Intersection Handling
Precedence Estimator
Vehicle Driver
Current Scene Reporter
State Estimator
Goal Selector
Lane Driving
Lane Selector
Distance Keeper
Merge Planner
Goal Selection
Data in from System
Data out to System
Lpolygon = Vmax(Taction+Tdelay+Tspacing)+Dsafety
Lpolygon = Vmax (Taction+ Tdelay+ Tspacing) + Dsafety
Transition Manager
Intersection Handling
C. Junior (Stanford)

Overall Software Architecture

Overall Software ArchitectureSe
nsor
s

Sensor Overview
Bumper Lasers (2*IBEO, 2*LDLRS)• Vehicle Tracking
3D Laser (Velodyne)• Vehicle Tracking• Obstacle Detection
2*SICK & 2*RIEGL Lasers• Lane & Curb Localization
5*Radars (Bosch LRR2)• Merge Safety

Overall Software Architecture
Mapping&
Localization
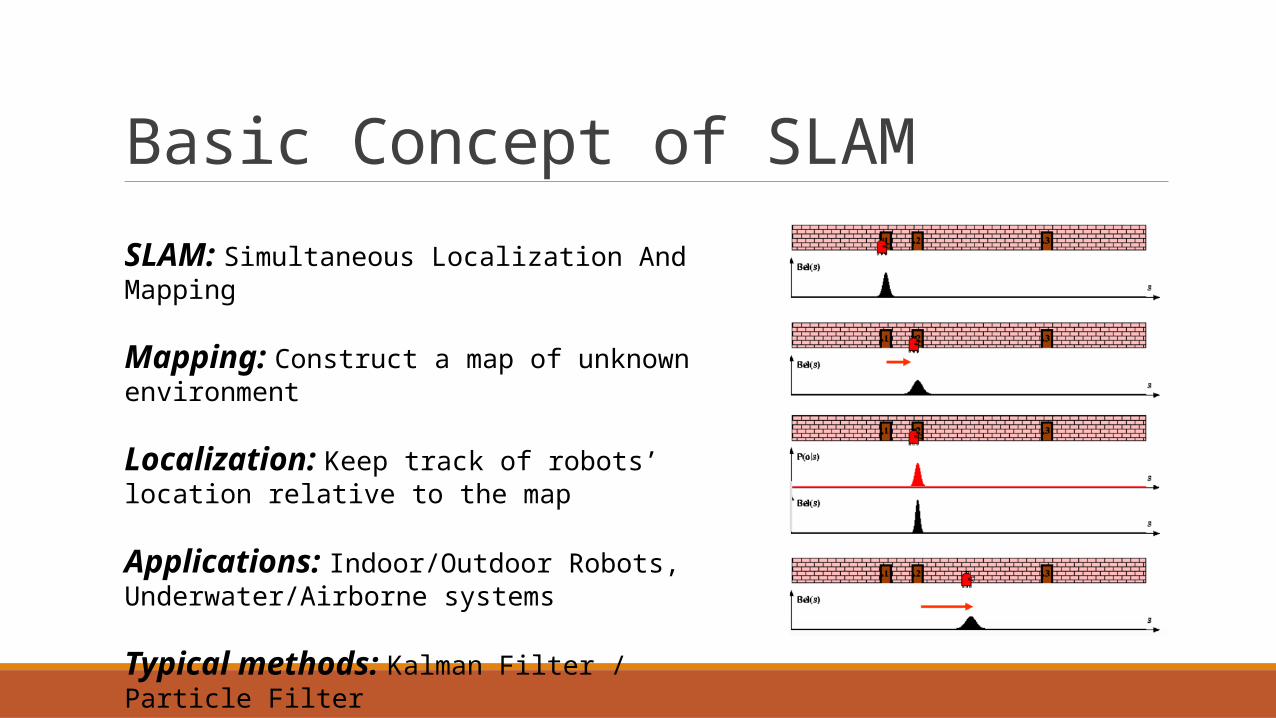
Basic Concept of SLAM SLAM: Simultaneous Localization And Mapping
Mapping: Construct a map of unknown environment
Localization: Keep track of robots’ location relative to the map
Applications: Indoor/Outdoor Robots, Underwater/Airborne systems
Typical methods: Kalman Filter / Particle Filter

Basic Process of SLAM
EKFOdometry
update
EKFRe-observation
EKFNew
observation
Data Association
Landmark Extraction
Laser Scan
Odometry Change
EKFOdometry
update
EKFRe-observation
EKFNew
observation
Data Association
Landmark Extraction
Laser Scan
Odometry Change
Robot
Landmark
EKFOdometry
update
EKFRe-observation
EKFNew
observation
Data Association
Landmark Extraction
Laser Scan
Odometry Change
EKFOdometry
update
EKFRe-observation
EKFNew
observation
Data Association
Landmark Extraction
Laser Scan
Odometry Change
EKFOdometry
update
EKFRe-observation
EKFNew
observation
Data Association
Landmark Extraction
Laser Scan
Odometry Change

RNDF Localization
Lateral Posterior Distribution
Lane Line Distribution
Applanix Localization
E. Summary

SummarySIMILARITIES
• Sensing: Multiple sensors, partially fused, partially redundant, and also with specialized functions. (First appearance of 3D LiDAR in autonomous vehicles)
• Perception: Sensor/Data fusion, mapping and localization, obstacle detection and tracking
• Planning: Mission planning, motion planning, (path planning)
NOVEL FEATURES
• Boss: Various components from behavioral subsystem (Lane driving, goal selection, intersection handling)
• Junior: Precise localization with the help of road reflectivity and curb-like obstacles
• Talos: A unified planning and control architecture (Navigator, motion planner and drivability map)
References Darms, M. S., Rybski, P. E., Baker, C., & Urmson, C. (2009). Obstacle detection and tracking for the urban challenge. IEEE Transactions on Intelligent Transportation Systems, 10(3), 475-485.
Leonard, J., How, J., Teller, S., Berger, M., Campbell, S., Fiore, G., ... & Koch, O. (2008). A perception driven autonomous urban ‐vehicle. Journal of Field Robotics, 25(10), 727-774.
Levinson, J., Askeland, J., Becker, J., Dolson, J., Held, D., Kammel, S., ... & Sokolsky, M. (2011, June). Towards fully autonomous driving: Systems and algorithms. In Intelligent Vehicles Symposium (IV), 2011 IEEE (pp. 163-168). IEEE.
Levinson, J., Montemerlo, M., & Thrun, S. (2007, June). Map-Based Precision Vehicle Localization in Urban Environments. In Robotics: Science and Systems (Vol. 4, p. 1).
Montemerlo, M., Becker, J., Bhat, S., Dahlkamp, H., Dolgov, D., Ettinger, S., ... & Johnston, D. (2008). Junior: The stanford entry in the urban challenge.Journal of field Robotics, 25(9), 569-597.
Riisgaard, S., & Blas, M. R. (2003). SLAM for Dummies. A Tutorial Approach to Simultaneous Localization and Mapping, 22(1-127), 126.
Urmson, C., Anhalt, J., Bagnell, D., Baker, C., Bittner, R., Clark, M. N., ... & Gittleman, M. (2008). Autonomous driving in urban environments: Boss and the urban challenge. Journal of Field Robotics, 25(8), 425-466.


















