
· Web viewFotovoltaic (Solar Cell/Fotocell) Berfungsi untuk mengubah sinar matahari menjadi...
51
BAB I PENDAHULUAN 1.1 Latar Belakang Suatu sistem kontrol adalah suatu sistem yang dirancang untuk dapat bertindak sebagai penghubung yang menjamin terjadinya suatu kelakuan sesuai dengan yang diinginkan dari suatu proses yang dikontrol. Kontrol berarti mengukur nilai dari variabel sistem atau proses yang dikontrol dan menerapkan variabel yang dimanipulasi ke sistem untuk mengoreksi atau membatasi penyimpangan nilai yang diukur dari nilai yang dikehendaki. Untuk merancang suatu sistem kontrol dalam industri. Salah satu hal yang penting untuk dipelajari diantaranya adalah jenis- jenis sensor yang ada..Memahami jenis-jenis sensor adalah syarat utama jika kita ingin mendesain pengontrol dari sebuah sistem. 1.2 Tujuan Penulisan a. Mahasiswa diharapkan dapat memahami jenis-jenis sensor b. Mahasiswa dapat mengetahui contoh sensor yang ada di pasaran. 1
Transcript of · Web viewFotovoltaic (Solar Cell/Fotocell) Berfungsi untuk mengubah sinar matahari menjadi...

BAB I
PENDAHULUAN
1.1 Latar Belakang
Suatu sistem kontrol adalah suatu sistem yang dirancang untuk dapat bertindak sebagai
penghubung yang menjamin terjadinya suatu kelakuan sesuai dengan yang diinginkan dari suatu
proses yang dikontrol. Kontrol berarti mengukur nilai dari variabel sistem atau proses yang
dikontrol dan menerapkan variabel yang dimanipulasi ke sistem untuk mengoreksi atau
membatasi penyimpangan nilai yang diukur dari nilai yang dikehendaki.
Untuk merancang suatu sistem kontrol dalam industri. Salah satu hal yang penting untuk
dipelajari diantaranya adalah jenis-jenis sensor yang ada..Memahami jenis-jenis sensor adalah
syarat utama jika kita ingin mendesain pengontrol dari sebuah sistem.
1.2 Tujuan Penulisan
a. Mahasiswa diharapkan dapat memahami jenis-jenis sensor
b. Mahasiswa dapat mengetahui contoh sensor yang ada di pasaran.
1

BAB II
PEMBAHASAN JENIS-JENIS SENSOR
2.1. Pembahasan Sensor
Sensor adalah sesuatu yang digunakan untuk mendeteksi adanya perubahan lingkungan
fisik atau kimia. Selanjutnya perubahan fisik yang dideteksi diubah menjadi besaran lain atau
diubah menjadi perubahan sinyal atau besaran diantaranya perubahan arus, tegangan ataupun
resistansi. Sensor dikelompokkan menjadi beberapa jenis diantaranya sensor posisi, sensor suhu,
sensor cahaya, sensor aliran, sensor tekanan, sensor jarak,dan sensor kelembaban. Berikut
merupakan pembahasan lebih lanjut dari jenis-jenis sensor.
1. Sensor suhu
Terdapat 4 jenis utama sensor suhu yang umum digunakan, yaitu thermocouple (T/C),
resistance temperature detector (RTD), termistor dan IC sensor.Thermocouple pada intinya
terdiri dari sepasang transduser panas dan dingin yang disambungkan dan dilebur bersama,
dimana terdapat perbedaan yang timbul antara sambungan tersebut dengan sambungan referensi
yang berfungsi sebagai pembanding.Resistance Temperature Detector (RTD) memiliki prinsip
dasar pada tahanan listrik dari logam yang bervariasi sebanding dengan suhu. Kesebandingan
variasi ini adalah presisi dengan tingkat konsisten/kestabilan yang tinggi pada pendeteksian
tahanan. Platina adalah bahan yang sering digunakan karena memiliki tahanan suhu, kelinearan,
stabilitas dan reproduksibilitas. Termistor adalah resistor yang peka terhadap panas yang
biasanya mempunyai koefisien suhu negatif, karena saat suhu meningkat maka tahanan menurun
atau sebaliknya. Jenis ini sangat peka dengan perubahan tahan 5% per C sehingga mampu
mendeteksi perubahan suhu yang kecil. Sedangkan IC Sensor adalah sensor suhu dengan
rangkaian terpadu yang menggunakan chipsilikon untuk kelemahan penginderanya. Mempunyai
konfigurasi output tegangan dan arus yang sangat linear.
a. Thermocoule
Berfungsi sebagai sensor suhu rendah dan tinggi, yaitu suhu serendah 3000F sampai
dengan suhu tinggi yang digunakan pada proses industri baja, gelas dan keramik yang lebih dari
30000F. Thermokopel dibentuk dari dua buah penghantar yang berbeda jenisnya (besi dan
konstantan) dan dililit bersama.
2

Gambar 2.1 Thermocouple
Prinsip Kerja :
Jika salah satu bagian pangkal lilitan dipanasi, maka pada kedua ujung penghantar yang
lain akan muncul beda potensial (emf). Thermokopel ditemukan oleh Thomas Johan Seebeck
tahun 1820 dan dikenal dengan Efek Seebeck.
Efek Seebeck:
Sebuah rangkaian termokopel sederhana dibentuk oleh 2 buah penghantar yang berbeda
jenis (besi dan konstantan), dililit bersama-sama. Salah satu ujung T merupakan measuring
junction dan ujung yang lain sebagai reference junction. Reference junction dijaga pada suhu
konstan 320F (00C atau 680F (200C). Bila ujung T dipanasi hingga terjadi perbedaan suhu
terhadap ujung Tr, maka pada kedua ujung penghantar besi dan konstantan pada pangkal Tr
terbangkit beda potensial (electro motive force/emf) sehingga mengalir arus listrik pada
rangkaian tersebut.
Kombinasi jenis logam penghantar yang digunakan menentukan karakteristik linier suhu
terhadap tegangan.
Tipe-tipe kombinasi logam penghantar thermokopel :
Tipe E (kromel-konstantan)
Tipe J (besi-konstantan)
Tipe K (kromel-alumel)
Tipe R-S (platinum-platinum rhodium)
Tipe T (tembaga-konstantan)
3

Tegangan keluaran emf (elektro motive force) thermokopel masih sangat rendah, hanya
beberapa milivolt. Thermokopel bekerja berdasarkan perbedaan pengukuran. Oleh karena itu jika
ukntuk mengukur suhu yang tidak diketahui, terlebih dulu harus diketahui tegangan Vc pada
suhu referensi (reference temperature). Bila thermokopel digunakan untuk mengukur suhu yang
tinggi makaa akan muncul tegangan sebesar Vh. Tegangan sesungguhnya adalah selisih antara
Vc dan Vh yang disebut net voltage (Vnet).
Besarnya Vnet ditentukan dengan rumus :
Vnet = Vh - Vc
Keterangan :
Vnet = tegangan keluaran thermokopel
Vh = tegangan yang diukur pada suhu tinggi
Vc = tegangan referensi
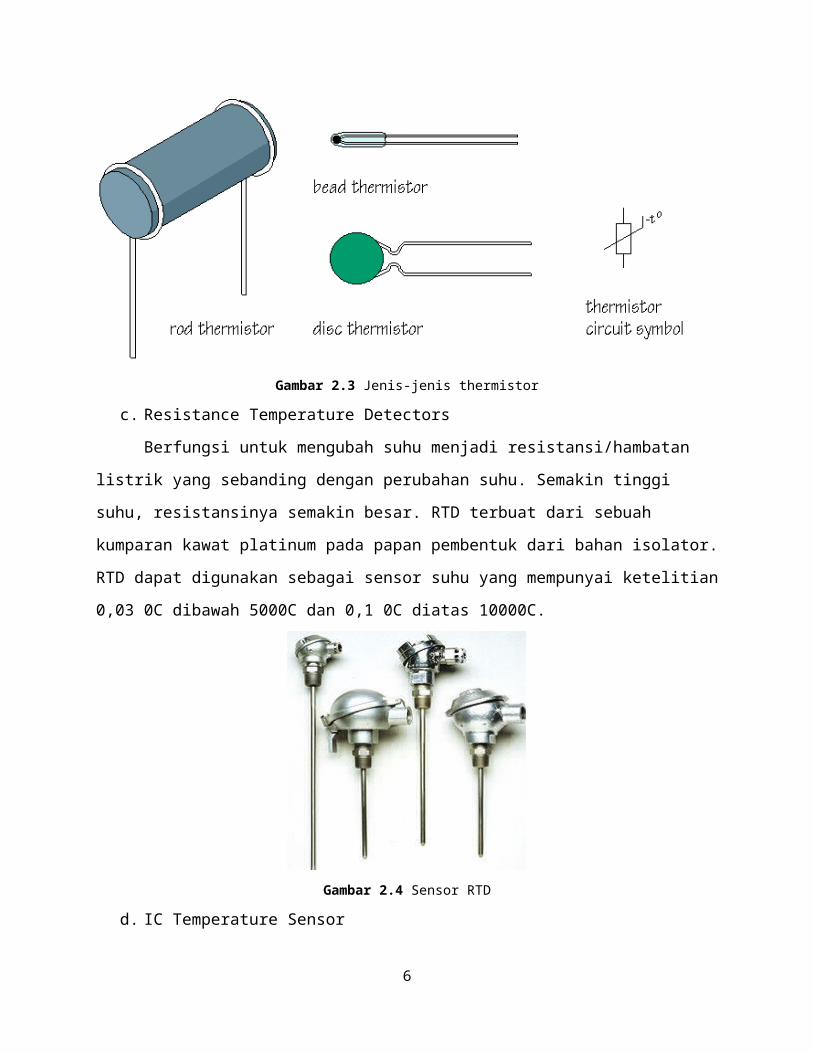
b. Thermistor
Berfungsi untuk mengubah suhu menjadi resistansi/hambatan listrik yang berbanding
terbalik dengan perubahan suhu. Semakin tinggi suhu, semakin kecil resistansi.
Gambar 2.2 Rangkaian Thermistor
4

Gambar 2.3 Jenis-jenis thermistor
c. Resistance Temperature Detectors
Berfungsi untuk mengubah suhu menjadi resistansi/hambatan listrik yang sebanding
dengan perubahan suhu. Semakin tinggi suhu, resistansinya semakin besar. RTD terbuat dari
sebuah kumparan kawat platinum pada papan pembentuk dari bahan isolator. RTD dapat
digunakan sebagai sensor suhu yang mempunyai ketelitian 0,03 0C dibawah 5000C dan 0,1 0C
diatas 10000C.
Gambar 2.4 Sensor RTD
d. IC Temperature Sensor
Misalnya IC jenis ini adalah LM35. Berfungsi untuk mengubah suhu menjadi tegangan
tertentu yang sesuai dengan perubahan suhu. Tegangan keluaran rangkaian bertambah 10
mV/0C. Dengan memberikan tegangan referensi negatif (-Vs) pada rangkaian, sesor ini mampu
5
bekerja pada rentang suhu -550C – 1500C. Tegangan keluaran dapat diatur 0 V pada suhu 00C
dan ketelitian sensor ini adalah ± 10C.
Gambar 2.5 IC LM35
2. Sensor Cahaya
Gambar 2.6 Sensor cahaya
Sensor cahaya terdiri dari 3 kategori. Fotovoltaic atau sel solar adalah alat sensor sinar yang
mengubah energi sinar langsung menjadi energi listrik, dengan adanya penyinaran cahaya akan
menyebabkan pergerakan elektron dan menghasilkan tegangan. Demikian pula dengan
Fotokonduktif (fotoresistif) yang akan memberikan perubahan tahanan (resistansi) pada sel-
selnya, semakin tinggi intensitas cahaya yang terima, maka akan semakin kecil pula nilai
6

tahanannya. Sedangkan Fotolistrik adalah sensor yang berprinsip kerja berdasarkan pantulan
karena perubahan posisi/jarak suatu sumber sinar (inframerah atau laser) ataupun target
pemantulnya, yang terdiri dari pasangan sumber cahaya dan penerima.
Berikut merupakan jenis-jenis dari sensor cahaya :
a. Fotovoltaic (Solar Cell/Fotocell)
Berfungsi untuk mengubah sinar matahari menjadi arus listrik DC. Tegangan yang
dihasilkan sebanding dengan intensitas cahaya yang mengenai permukaan solar cell. Semakin
kuat sinar matahari tegangan dan arus listrik Dc yang dihasilkan semakin besar.Bahan pembuat
solar cell adalah silicon, cadmium sullphide, gallium arsenide danselenium.
Prinsip kerja: Bila cahaya jatuh pada solar cell, depletion layer akan berkurang dan
elektron berpindah melalui hubungan “pn”. Besarnya arus yang mengalir sebanding dengan
perpindahan elektron yang ditentukan intensitas cahayanya.
b. Fotoconductiv
Berfungsi untuk mengubah intensitas cahaya menjadi perubahan konduktivitas.
Kebanyakan komponen ini erbuat dari bahan cadmium selenoide atau cadmium sulfide.
Tipe-tipe Fotoconductiv:
LDR (Light Dependent Resistor)
Berfungsi untuk mengubah itensitas cahaya menjadi hambatan listrik. Semakin banyak
cahaya yang mengenai permukaan LDR hambatan listrik semakin besar.
Fotodiode
Berfungsi untuk mengubah intensitas cahaya menjadi konduktivitas dioda. Fotodiode
sejenis dengan dioda pada umummya, perbedaannya pada fotodiode ini adalah dipasangnya
sebuah lensa pemfokus sinar untuk memfokuskan sinar jatuh pada pertemuan ”pn”.
Prinsip kerja : Energi pancaran cahaya yang jatuh pada pertemuan “pn” menyebabkan
sebuah elektron berpindah ke tingkat energi yang lebih tinggi. Elektron berpindah ke luar dari
valensi band meninggalkan hole sehingga membangkitkan pasangan elektron bebas dan hole.
Fototransistor
Berfungsi untuk mengubah intensitas cahaya menjadi konduktivitas transistor. Fototransistor
sejenis dengan transistor pada umummya. Bedaannya, pada fototransistor dipasang sebuah lensa
pemfokus sinar pada kaki basis untuk memfokuskan sinar jatuh pada pertemuan ”pn”.
7

c. Fotolistrik
Sensor PIR (Passive Infra Red) adalah sensor yang digunakan untuk mendeteksi adanya
pancaran sinar infra merah. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar
infra merah tetapi hanya menerima radiasi sinar infra merah dari luar.
Gambar 2.7 sensor PIR
Sensor ini biasanya digunakan dalam perancangan detektor gerakan berbasis PIR. Karena
semua benda memancarkan energi radiasi, sebuah gerakan akan terdeteksi ketika sumber infra
merah dengan suhu tertentu (misal: manusia) melewati sumber infra merah yang lain dengan
suhu yang berbeda (misal: dinding), maka sensor akan membandingkan pancaran infra merah
yang diterima setiap satuan waktu, sehingga jika ada pergerakan maka akan terjadi perubahan
pembacaan pada sensor.
Sensor PIR terdiri dari beberapa bagian yaitu :
Lensa Fresnel
Penyaring Infra Merah
Sensor Pyroelektrik
Penguat Amplifier
Komparator
8

Gambar 2.8 bagian penyusun sensor PIR
Cara kerja pembacaan sensor PIR
Pancaran infra merah masuk melalui lensa Fresnel dan mengenai sensor pyroelektrik,
karena sinar infra merah mengandung energi panas maka sensor pyroelektrik akan menghasilkan
arus listrik. Sensor pyroelektrik terbuat dari bahan galium nitrida (GaN), cesium nitrat (CsNo3)
dan litium tantalate (LiTaO3). Arus listrik inilah yang akan menimbulkan tegangan dan dibaca
secara analog oleh sensor. Kemudian sinyal ini akan dikuatkan oleh penguat dan dibandingkan
oleh komparator dengan tegangan referensi tertentu (keluaran berupa sinyal 1-bit). Jadi sensor
PIR hanya akan mengeluarkan logika 0 dan 1, 0 saat sensor tidak mendeteksi adanya pancaran
infra merah dan 1 saat sensor mendeteksi infra merah. Sensor PIR didesain dan dirancang hanya
mendeteksi pancaran infra merah dengan panjang gelombang 8-14 mikrometer. Diluar panjang
gelombang tersebut sensor tidak akan mendeteksinya. Untuk manusia sendiri memiliki suhu
badan yang dapat menghasilkan pancaran infra merah dengan panjang gelombang antara 9-10
mikrometer (nilai standar 9,4 mikrometer), panjang gelombang tersebut dapat terdeteksi oleh
sensor PIR. (Secara umum sensor PIR memang dirancang untuk mendeteksi manusia).
Sensor PIR memiliki jangkauan jarak yang bervariasi, tergantung karakteristik sensor.
Proses penginderaan sensor PIR dapat digambarkan sebagai berikut:
9

Gambar 2.9 Jangkauan sensor PIR
3. Sensor aliran
Gambar 2.10 Orifice Plate
Orifice Plate adalah salah satu alat yang digunakan untuk mengukur laju kecepatan aliran
fluida di dalam saluran yang tertutup (pipa) berdasarkan prinsip beda tekanan, yaitu prinsip
Bernoulli yang menyatakan bahwa ada hubungan antara tekanan fluida dan kecepatan fluida.
Ketika meningkatkan kecepatan, tekanan berkurang dan sebaliknya.
10

Prinsip Kerja Orifice
Gambar 2.11 Prinsip kerja Orifice Plate
Orifice Plate merupakan suatu pelat tipis dengan lubang ditengahnya. Biasanya dipasang
di pipa dimana ada aliran fluidanya. Ketika fluida mencapai pelat Orifice, fluida akan dipaksa
untuk masuk melalui lubang kecil di pelat orificenya. Dengan begitu, kecepatan dan tekanan dan
aliran berubah. Dapat digunakan pada fluida yang bersih dan gas. Tidak biasa digunakan pada
fluida yang mengandung kotoran/solid.
Vena contracta, adalah suatu titik pada aliran fluida, dimana diameter alirannya adalah
yang paling terkecil, tekanannya minimum dan kecepatannya maksimum. Setelah melewati vena
contracta itu, diameter fluida melebar, kecepatan dan tekananya pun berubah kembali. Dengan
menghitung perbedaan tekanan pada saat di keadaan biasa dan pada saat vena contracta, maka
besarnya laju kecepatan aliran fluida dapat kita cari dengan persamaan Bernoulli.
Berikut adalah pemasangan Orifice Plate
Gambar 2.12 Pemasangan Orifice Plate
11

Jenis-Jenis Orifice Plate :
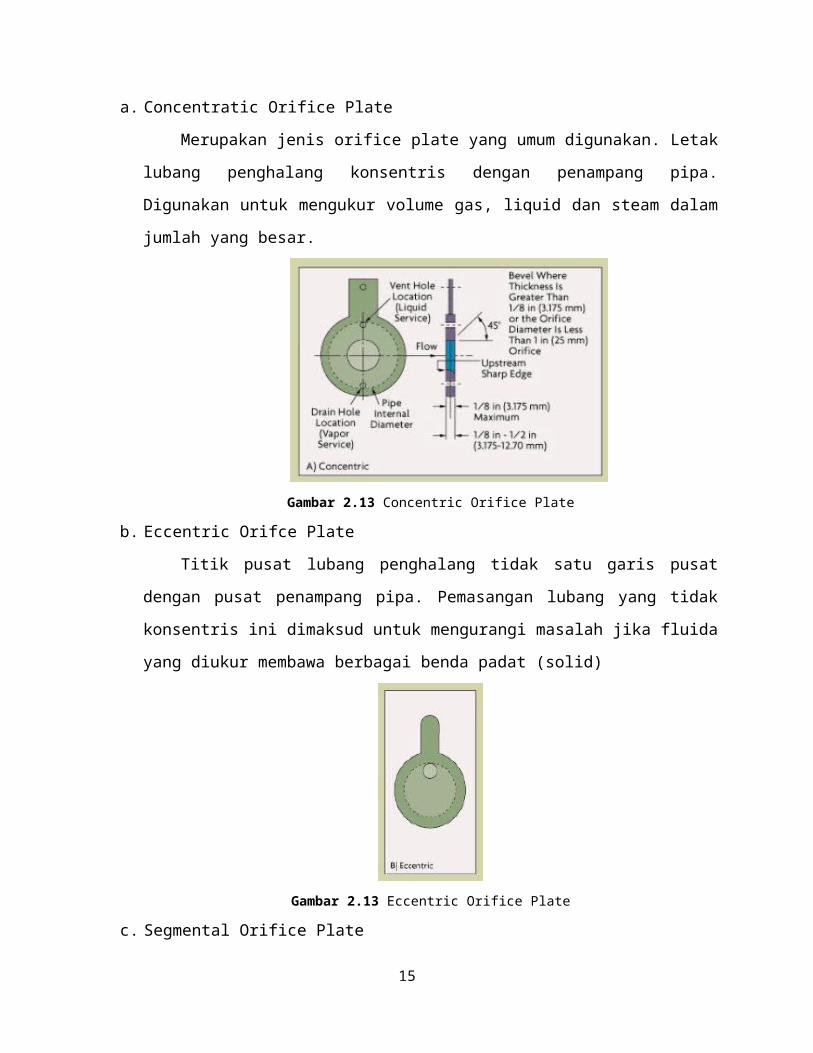
a. Concentratic Orifice Plate
Merupakan jenis orifice plate yang umum digunakan. Letak lubang penghalang
konsentris dengan penampang pipa. Digunakan untuk mengukur volume gas, liquid dan
steam dalam jumlah yang besar.
Gambar 2.13 Concentric Orifice Plate
b. Eccentric Orifce Plate
Titik pusat lubang penghalang tidak satu garis pusat dengan pusat penampang pipa.
Pemasangan lubang yang tidak konsentris ini dimaksud untuk mengurangi masalah jika
fluida yang diukur membawa berbagai benda padat (solid)
Gambar 2.13 Eccentric Orifice Plate
c. Segmental Orifice Plate
Segmental orifice plates digunakan terutama pada service yang sama dengan
eccentric orifices, sehingga kelebihan dan kekurangan adalah kurang lebih sama.
12

Gambar 2.14 Segmental Orifice Plate
Keuntungan dan Kerugian Penggunaan Orifice Plate
Keuntungan dari penggunaan orifice plate adalah sebagai berikut:
1. Konstruksi sederhana
2. Ukuran pipa dapat dibuat persis sama dengan ukuran pipa sambungan.
3. Harga pembuatan alat cukup murah
4. Output cukup besar
5. Mudah dalam pemasangan
6. Mudah dalam penggantian
Sedangkan kerugian dari penggunaan orifice plate adalah sebagai berikut:
1. Jika terdapat bagian padat dari aliran fluida, maka padat bagian tersebut akan terkumpul
pada bagian pelat disisi inlet.
2. Jangkauan pengukuran sangat rendah
3. Dimungkinkan terjadinya aliran Turbulen sehingga menyebabkan kesalahan pengukuran jadi
besar karena tidak mengikuti prinsip aliran Laminer.
4. Tidak memungkinkan bila digunakan untuk mengukur aliran fluida yang bertekanan rendah
Orifice Plate biasanya dipasang pada pipa yang butuh diukur aliranairnya secara berkala.
Biasa juga dipasang di beberapa sungai kecil untuk mengukur laju aliran air pada lokasi dimana
sungai tersebut masuk kesaluran air. Akan tetapi hanya sungai tertentu saja, karena aliran air
yang melewati orifice plate harus tetap penuh dan tidak ada kotoran yang masuk
Orifice plate juga digunakan untuk mengukur aliran air pada perusahaan air minum.
Orifice plate tidak bisa digunakan untuk air yang kotor sehingga air yang stelir seperti air minum
bisa diukur alirannya menggunakan orifive palte.
Berikut adalah beberapa vendor dari orifice plate, yaitu sebagai berikut :(datasheet terlampir.)
13

1. Rosemount
2. Wika
3. Samson
4. Fuji Electric
Rumus yang digunakan dalam perhitungan laju aliran pada orifice plate adalah sebagai
berikut:
Q=C A2 √ 2(P1−P2)
ρ(1−β4)
Dimana
Q = lajualiran volumetric, m³/s
C = koefisienaliran orifice
A2 = luasdarilubang orifice, m²
P1 = tekanan pada pipasebelummasuk orifice, N/m2
P2 = tekananpadapipasetelahmasuk orifice, N/m2
ρ = beratjenis, kg/m³
β = perbandingan diameter lubang orifice dengan pipa
4. Sensor tekanan
Gambar 2.15 Sensor Tekanan
Sensor tekanan - sensor ini memiliki transduser yang mengukur ketegangan kawat, dimana
mengubah tegangan mekanis menjadi sinyal listrik. Dasar penginderaannya pada perubahan
tahanan pengantar (transduser) yang berubah akibat perubahan panjang dan luas penampangnya.
14
5. Sensor Jarak
Salah satu sensor jenis ini yaitu sensor ultrasonic. Sensor ultrasonik bekerja berdasarkan
prinsip pantulan gelombang suara, dimana sensor ini menghasilkan gelombang suara yang
kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar penginderaannya.
Perbedaan waktu antara gelombang suara dipancarkan dengan ditangkapnya kembali gelombang
suara tersebut adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya.
Jenis objek yang dapat diindera diantaranya adalah: objek padat, cair, butiran maupun tekstil.
Gambar 2.16 Sensor Ultrasonik
6. Sensor Kelembaban
Jenis – jenis sensor kelembaban (humidity sensor) :
a. Capacitive Sensors
b. Electrical Conductivity Sensors
c. Thermal Conductivity Sensors
Berikut merupakan penjelasan lebih lanjut mengenai jenis-jenis sensor kelembaban :
a. Capasitive Sensors (sensor kapasitif)
Sebuah kapasitor air-filled/terisi-udara dibuat sebagai suatu sensor kelembaban relative karena uap dalam atmosfer merubah permivitas elektrik udara menurut persamaam di bawah ini:
Dimana :
T = ketentuan suhu (dalam K)
P = adalah tekanan udara basah (dalam mHg)
15

Ps = adalah tekanan saturasi uap air ditemperatur T (dalam mHg)
H = adalah kelembaban relative (dalam %)
Rumus tersebut menunjukan konstanta dielektrik dari udara basah, dan untuk itu kapasitansi adalah sebanding dengan kelembaban relative.
Jarak atau ruang antara plat kapasitor dapat diisi dengan suatu isolator yang tepat yang memiliki konstanta dielektrik yang berubah secara signifikan suatu waktu tergantung kelembaban. Sensor kapasitif dapat dibentuk dari film polimer hygroscopic dengan lapisan metal elektroda pada bagian yang berlawanan. Kapasitansi suatu sensor kira-kira proporsional/sebanding dengan kelembaban relative H
Dimana Co adalah kapasitansinya pada H = 0
Gambar 2.17 Capacitive Moisture sensing system
Pada gambar 2.17 menunjukkan sebuah block diagram system pengukuran kapasitif, dimana konstanta dielektrik dari contoh/sample material tersebut merubah frekuensi osilator. Metode tersebut memiliki beberapa keterbatasan ; sebagai contohnya,keakuratannya kurang ketika pengukuran kelembaban dibawah 0,5%, material yang dijadikan contoh tersebut harus bersih dari parikel asing yang memiliki konstanta dielektrik relative yang tinggi (contohnya: benda metal dan plastic), dan suatu penentuan contoh pengukuran harus dipertahankan.
Gambar 2.18 Capacitive thin-film humidity sensor
16

Sebuah sensor kelembaban film tipis dapat terbuat padasebuah substrat silicon. Sebuah lapisan dari SiO2 3000 Å thick ditempatkan pada suatu substrat n-Si (gbr. 13.4 B) Dua metal elektroda ditempatkan pada lapisan SiO2 tersebut Metal-metal tersebut terbuat dari aluminium, chromium, atau phosphor yang didoping polysilikon (LPCVD)2. Kerapatan elektroda berkisar 2000-5000 Å. Elektroda tersebut terbentuk dalam pola integritas yang ditunjukkan pada gbr.2.18.
Sensor yang paling baik dilapisi dengan sebuah lapisan dielektrik. Untuk lapisan ini, beberapa material dapat digunakan seperti vapor deposited SiO2 atau phosphorosilicate glass (CVDPSG).Kerapatan dari lapisan berkisar antara 30-4000 Å.
b. Electrical Conductivity Sensors (Sensor Konduktivitas Elektrik)
Resistansi dari banyak konduktor nonmetal secara umum tergantung pada kandungan air konduktor tersebut, yang merupakan suatu dasar dari sensor kelembaban resistif atau hygrostator
Gambar 2.19 Composition of a conductive humidity sensor
Sensor tersebut berisi suatu material yang secara relative resistivitasnya rendah yang berubah secara signifikan dibawah perubahan kondisi kelembaban.Contoh lainnya dari sensor kelembaban konduktivitas adalah disebut dengan “Pope element”, yang terdiri dari polystyrene yang dilakukan/diperlakukan dengan asam sulfur untuk memperoleh karakteristik surface-resistivitas yang diinginkan. Material lainnya yang menjanjikan untuk pembuatansuatu film dalam sensor konduktivitas adalah solidpolyelectrolytes karena konduktivita elektrik dari bahan itu bervariasi/berubah terhadap kelembaban.
Sensor kelembaban solid-state dapat dibuat dengan substrat silicon. Silikon tersebut harus berkonduktansi tinggi, yang menyediakan garis edar elektrik dari elektroda aluminium hampa udara/vacuum yang ditempatkan pada permukaan sensor. Suatu lapisan oksida yang dibentuk pada bagian atas lapisan aluminium konduktiv, dan pada bagian atas itu, alektroda lainnya dibentuk. Lapisan aluminium tersebut dianodized dalam suatu cara untuk membentuk permukaan oksida berpori.
17

Elektroda bagian paling atas/diatasnya terbuat dari suatu bentuk emas berpori yang dapat ditembus gas, dan diwaktu yang sama dapat menyediakan kontak elektric.
Oksida aluminium (Al2O3), seperti banyak material-material lainnya, yang dengan siap mengabsorbsi air ketika terkontak/terhubung dengan campuran gas yang mengandung air dalam keadaan beruap air.
c. Thermal Conductivity Sensors (Sensor Konduktivitas Thermal)
Penggunaan konduktivitas thermal dari gas untuk mengukur kelembapan dapat di ukur oleh sebuah sensor thermistor / dasar (gambar 2.20).Dua thermistor kecil (Rt1 dan Rt2) didukung dengan kawat-kawat tipis untuk memperkecil rugi konduktivitas thermal. Thermistor pada sebelah kiri dibuka agar gas yang berada di luar masuk melalui lubang, dan thermistor sebelah kanan tertutup dengan rapat dalam udara kering. Thermistor tersebut memperkuat / menghasilkan self- heating pada penerimaan arus rangkaian.
Gambar 2.20 Absolute humiditysensor with self-heating thermistor
Awalnya, jembatan diseimbangi dalam udara kering untuk menentukan suatu nilai referensi nol. Keluaran dari sensor ini bertambah secara berangsur-angsur seperti kenaikan kelembapan absolute dari nol.
7. Sensor posisi
Sensor posisi merupakan suatu sensor yang dapat mendeteksi orientasi posisi dari suatu objek. Berikut merupakan beberapa jenis sensor posisi.
a. LiDAR Sensor ( Light Detection and Ranging )
LiDAR Sensor adalah sebuah sensor yang berfungsi sebagai pemancar sinar laser ke
object dan merekam kembali gelombang pantulannya setelah mengenai objek target. Sinar laser
(Light Amplification by Stimulated Emission of Radiation) merupakan suatu mekanisme
pemancaran radiasi elektromagnetik dalam bentuk cahaya tunggal dan koheren pada spectrum
18

dan frekuensi tertentu. Sehingga pancarannya memiliki sudut pancaran yang kecil dan memiliki
intensitas yang tinggi untuk dapat mencapai jarak yang jauh dan terarah dengan tepat pada suatu
perangkat.
Jenis dari gelombang yang dipancarkan oleh sensor laser ialah gelombang hijau dan
gelombang Near infrared (NIR) atau infrared. Gelombang infrared memiliki panjang gelombang
± 1500 nm yang berfungsi untuk mengukur suatu daratan topografi di permukaan bumi bukan
untuk perairan. Karena air akan menyerap gelombang NIR sehingga pantulan yang diterima
sensor akan sedikit bahkan tidak ada sama sekali. Sedangkan, gelombang hijau memiliki panjang
gelombang 500-550 nm berperan sebagai gelombang penetrasi jika suatu sinar laser mengenai
daerah perairan. Biasanya gelombang hijau digunakan untuk Hydrography LiDAR yaitu untuk
pengukuran batimetri atau kedalaman laut yang relative dangkal.
Sensor laser memiliki beberapa karakteristik yang dapat dibedakan dari kekuatan sinar
laser yang dipancarkan, cakupan dari pancaran sinar gelombang laser dan jumlah sinar laser yang
dihasilkan per detik. Selain itu salah satu karakteristik sensor LiDAR yang menjadi kelebihan
alat LiDAR disbanding yang lainnya ialah kemampuan gelombang tersebut untuk melakukan
multiple returns, yakni sensor LiDAR dapat merekam beberapa kali gelombang pantul dari objek
yang ada di permukaan bumi untuk setiap gelombang yang dipancarkan. Multiple Returns
digunakan untuk menentukN bentuk dari objek atau vegetasi yang menutupi permukaan tanah.
Ilustrasi Multiple Returns ditunjukan oleh gambar X.X. Terlihat pada gambar, gelombang yang
dipancarkan dan dipantulkan tidak hanya mengenai permukaan tanah tetapi juga mengenai objek
–objek yang ada di atas tanah.
Gambar 2.21 Multiple Returns pada LiDAR
19

Ketika pulsa laser tersebut dipancarkan, permukaan objek yang pertama kali
memantulkan pulsa tersebut akan menjadi gelombang pantul pertama (First Return), gelombang
pantul ini biasa digunakan untuk membuat Digital Surface Model (DSM). Kemudian objek yang
kedua kalinya memantulkan pulsa tersebut akan menjadi Second Return dan seterusnya hingga
gelombang pantul terakhir. Kemampuan sensor saat ini dapat merekam hingga 5 kali pantulan.
Pada akuisisi data, pada sensor LiDAR dilengkapi juga dengan alat pengukur waktu
untuk menghitung selang waktu antara setiap kali sinar dipancarkan dan diterima kembali oleh
sensor. Maka dari itu, sensor LiDAR dapat mengukur jarak antara sensor pada wahana pesawat
terbang dengan titik objek yang ada di permukaan bumi yang ingin diketahui kordinatnya.
Sensor laser yang digunakan pada sistem LiDAR memancarkan pulsa laser dengan
frekuensi tertentu kemudian akan menerima kembali pantulannya pada selang waktu tertentu.
Ketika sensor tersebut memancarkan laser, jarak antara sensor transmitter di dalam pesawat dan
suatu objek di permukaan tanah(berupa titik, gedung, atau pohon) dapat segera ditentukan
dengan akurat. Jarak antara transmitter dan target tersebut ditentukkan berdasarkan time of travel
terdapat di gambar X.X
Gambar 2.22 Ilustrasi time of travel
Persamaan yang digunakan untuk mengukur jarak sensor LiDAR yaitu menggunakan
rumus (1) :
D = (V x T)/2 (1)
Dimana :
D = jarak antara laser dan objek dipermukaan tanah
T = jumlah waktu yang dibutuhkan sinar laser dari awal dipancarkan sampai
kembali ke sensor
V = kecepatan cahaya
Untuk membuat sistem LiDAR yang utuh dibutuhkan sensor pendukung lainnya yaitu :
a. Sensor IMU
b. GPS
20

c. Kamera Digital
Jika sensor LiDAR diintegrasikan dengan 3 komponen di atas maka ilustrasinya
ditunjukan gambar X.X
Gambar 2.23 Ilustrasi komponen LiDAR
Salah satu jenis sensor LiDAR yaitu Velodyne HDL-32E yang memiliki akurasi
pemetaan sampai 2 cm dan jangkauan pemetaan radiusnya mencapai 70 meter. Untuk info lebih
lengkapnya dapat dengan membuka link : http://velodynelidar.com/lidar/.
Gambar 2.24 Katalog online sensor LiDAR HDL-32
21

b. Throttle Position Sensor
Posisi throttle sensor (TPS) adalah sensor yang digunakan untuk memonitor posisi
throttle dalam mesin pembakaran internal. Sensor ini biasanya terletak di poros kupu-kupu
sehingga langsung dapat memantau posisi katup throttle kupu-kupu.
Sensor ini biasanya potensiometer, dan oleh karena itu memberikan perlawanan variabel
tergantung pada posisi katup (dan maka posisi throttle).Sensor Linear Variable Differential
Transformers (LVDT) adalah suatu sensor yang bekerja berdasarkan prinsip trafo diferensial
dengan gandengan variabel antara gandengan variabel antara kumpar an primer dan kumparan
sekunder.
Bentuk yang lebih maju dari sensor juga digunakan, misalnya sensor posisi throttle ekstra
tertutup (CTPS) dapat digunakan untuk menunjukkan bahwa throttle benar-benar
tertutup. Beberapa ECU juga mengontrol posisi throttle dan jika yang dilakukan sensor posisi
digunakan dalam sebuah loop umpan balik untuk mengaktifkan kontrol tersebut.
Terkait dengan TPS pedal gas sensor, yang sering termasuk wide open throttle (WOT)
sensor. accelerator pedal sensor yang digunakan dalam "drive by wire" sistem, dan penggunaan
paling umum dari sensor throttle terbuka lebar digunakan untuk fungsi-down tendangan pada
transmisi otomatis
Gambar 2.25 TPS tampak dari atas
22

Gambar 2.26 TPS tampak dari depan kedalam
c. Inertial Measurement Unit (IMU)
Perangkat Pengukur Inersia suatu benda atau sering disebut dengan IMU, adalah suatu
perangkat elektronik yang mampu mengukur dan memberikan informasi berupa data kecepatan
suatu benda, misal pesawat, orientasi pesawat terhadap kerangka inersia pesawat atau terhadap
kerangka bumi, dan gaya gravitasi, semua data tersebut diperoleh dengan mengkombinasikan
beberapa peralatan sensor, misalnya akselerometer dan gyroscope.
IMU adalah komponen utama dari sistem navigasi inersia yang dipakai pada pesawat
udara, pesawat luar angkasa, underwater vehicle, peluru kendali atau rudal. Dengan
kapasitasnya, data yang diperoleh dari IMU memungkin sistem komputer atau mikroprosesor
mengestimasi posisi dan orientasi dari pesawat, banyak metode yang bisa digunakan, misalnya
Kalman Filter dan pengembangannya (EKF,UKF), dan Direction Cosine Matrix.
Perangkat IMU bekerja dengan mendeteksi sinyal yang proporsional dengan gaya
gravitasi atau gaya ekternal, dengan derajad kebebasan satu atau lebih, dan mendeteksi sinyal
yang proporsional dengan laju perubahan sudut (angular rate) yang berasal dari sensor
gyroscope, dengan menggunakan satu atau lebih derajad kebebasan.
Gambar 2.27. IMU
23

Gambar 2.28. Linear Accelerometer
Gambar 2.29. Gyroscope
Cara Kerja dari Inertial Measurement Unit adalah sebagai berikut :
Prinsip Kerja Inertial Measurement Unit (IMU) adalah gabungan dari beberapa sensor
accelerometer, gyroscope, dan ada juga yang memakai magneto meter. Sebuah unit pengukuran
inersia bekerja dengan mendeteksi tingkat akselerasi menggunakan satu atau lebih
accelerometer, dan mendeteksi perubahan atribut rotasi seperti pitch, roll dan yaw menggunakan
24

satu atau lebih gyroscope. Dan beberapa juga mencakup magnetometer, terutama untuk
membantu mengkalibrasi terhadap orientasi drift.
Accelerometer adalah sensor yang digunakan untuk mengukur percepatan suatu objek.
Accelometer mengukur percepatan dynamic dan static. Pengukuran dynamic adalah pengukuran
percepatan pada objek bergerak, sedangkan pengukuran static adalah pengukuran terhadap
gravitasi bumi. Untuk mengukur sudut kemiringan (tilt).
Sensor accelerometer merupakan salah satu jenis sensor IMU (Inertial Measure Unit)
yang digunakan untuk mengukur percepatan linier dari suatu objek yang bergerak sepanjang
sumbu axis tertentu. Prisip kerja accelerometer pada umumnya berdasarkan gerakan mekanik
sebuah massa sesuai dengan Hukum Newton kedua. Percepatan diperoleh dari perubahan posisi
dari massa terhadap referensi. Piezoresistive, piezoelectric, dan differential capacitive
accelerometer merupakan jenis accelerometer yang umum ada di pasaran.
Secara konseptual, sebuah accelerometer berlaku seperti beban yang teredam pada spiral.
Jika suatu accelerometer mengalami gaya dari luar seperti gravitasi maka beban akan berpindah
hingga gaya dari luar tersebut dapat distabilkan oleh gaya dari spiral. Perpindahan ini kemudian
diterjemahkan menjadi sebuah akselerasi/percepatan. Ada dua jenis accelerometer yaitu
accelerometer 2 axis dan accelerometer 3 axis. Dengan semakin banyaknya sumbu yang
direpresentasikan maka semakin banyak pula aplikasi yang dapat dilakukan.
Gambar 2.30 Pergerakan dalam tiga derajat kebebasan
Gyroscope adalah berupa sensor gyro untuk menentukan orientasi gerak dengan
bertumpu pada roda atau cakram yang berotasi dengan cepat pada sumbu. Jadi bagaimana
dengan Giro sensor? Gyro sensor bisa mendeteksi gerakan sesuai gravitasi, atau dengan kata lain
mendeteksi gerakan pengguna. Kita bisa membayangkan sebuah game pertempuran, sebelum ini
bila kita ingin melihat situasi sekeliling, kita akan menyapu layar searah terus menerus untuk
berputar, dengan gyro sensor ini kita cukup berputar sesuai gravitasi seperti benar-benar melihat
25

sekeliling. Atau bila melihat sebuah obyek 3D kita cukup berputar untuk melihat setiap sudut
obyek tersebut. Tentu ini adalah sebuah metode yang menghasilkan pengalaman seolah nyata.
Gyroscope biasa digunakan untuk mengukur sumbu rotasi roket. Sebelum digunakan,
sensor gyroscope terlebih dahulu dilakukan proses kalibrasi dengan menggunakan bandul. Proses
kalibrasi tersebut berfungsi untuk memperoleh nilai faktor kalibrasi. Gyroscope memiliki
keluaran berupa kecepatan sudut dari arah 3 sumbu yaitu: sumbu x yang nantinya akan menjadi
sudut phi (kana dan kiri) dari sumbu y nantinya menjadi sudut theta (atas dan bawah), dan
sumbu z nantinya menjadi sudut psi (depan dan belakang).
Sistem navigasi mengandung IMU yang memiliki accelerometers sudut dan linier (untuk
perubahan posisi), beberapa IMU memasukkan elemen gyroscope (untuk menjaga referensi
sudut absolut).
Sebuah komputer terus menghitung posisi kendaraan saat ini. Pertama, untuk masing-
masing dari enam derajat kebebasan (x, y, z dan θx, θy dan θz), hal tersebut terintegrasi dari
waktu ke waktu percepatan merasakan, bersama dengan perkiraan gravitasi, untuk menghitung
kecepatan arus. Kemudian mengintegrasikan kecepatan untuk menghitung posisi saat ini.
Bimbingan Inertial ini akan sulit tanpa komputer. Keinginan untuk menggunakan
panduan inersia di Minuteman rudal dan Proyek Apollo melaju upaya awal untuk miniaturirasi
komputer.
Sistem bimbingan Inertial sekarang biasanya dikombinasikan dengan sistem navigasi
satelit melalui sistem penyaringan digital. Sistem inersia menyediakan data jangka pendek,
sedangkan sistem satelit mengoreksi kesalahan akumulasi dari sistem inersia.
Sebuah sistem bimbingan inersia yang akan beroperasi di dekat permukaan bumi harus
memasukkan Schuler tuning sehingga platform akan terus menunjuk ke arah pusat bumi sebagai
kendaraan bergerak dari satu tempat ke tempat lain.
Karakteristik dari IMU adalah sebagai berikut :
- Akselerometer dalam IMU modern memiliki prinsip kerja yang terdiri dari lengan – lengan
pada suatu massa yang dapat bergerak dan lengan yang tidak dapat bergerak. Seperti gambar
diatas, akan tetapi ia memakai beda kapasitansi
- Gyroscope dalam IMU modern sama seperti akselerometer, akan tetapi yang dideteksi
adalah gaya coriolis. Gaya coriolis adalah penambahana kecepatan tangensial yang
disebabkan oleh perubahan kecepatan sudut.
26

- Dengan adanya tambahan Gyroscope, maka kelemahan dari akselerometer dapat tertutupi
yaitu noise berupa getaran. Gyroscope tahan terhadap getaran.
- Dengan penggabungan 2 sensor inilah, IMU dapat menentukandata sudut orientasi dan data
percepatan.
Fungsi dan Kegunaan IMU adalah sebagai berikut :
Fungsi Memberi Data Sudut Orientasi :
A. Menjamin kehandalan dari kendali Quadrotor
B. Mengukur Manuver yang dilakukan pada pesawat terbang
C. Memberikan data sudut manuver suatu benda (pitch, yaw, role)
D. Membantu navigasi kemiringan pada pesawat dari proses terhadap ground
E. Instrumentasi Avionic Artificial Horizon
Fungsi Memberi Data Percepatan :
A. Mengukur Percepatan pada suatu benda
B. Melacak Posisi Pesawat dengan Metode Dead Reckoning
C. Untuk membantu Sistem Navigasi Pesawat
Aplikasi Secara Nyata dari sensor IMU adalah sebagai berikut
Gambar 2.31 Aplikasi IMU dalam Pesawat Terbang
27

Gambar 2.32 Aplikasi IMU dalam UAV helicopter
Gambar 2.33 Aplikasi IMU dalam Satellite Luar Angkasa
8. Sensor api (Flame Detector)
Sensor pendeteksi api adalah suatu system yang memberikan isyarat/tanda saat adanya
indikasi terjadinya kebakaran yang dideteksi oleh sensor sebagai input dan suara / lampu sebagai
peringatan keluaran (output warning), yang semuanya di control oleh sebuah PLC
(Programable Logic Controller), sensor yang berfungsi untuk mendeteksi api yaitu sensor api,
asap , dan asap kemudian sinyal / logika tersebut dikirm ke PLC dan kemudian di salurkan ke
output berupa alarem, sirine dan lain-lain.
Berikut ini adalah gambar diagram blok sederhana sensor pendeteksi api :
28

Gambar 2.34 Diagram blok sensor pendeteksi api
Mana yang sesuai untuk diaplikasikan, tergantung pada kebutuhan dan kondisi di
lapangan. Ketiganya termasuk alat untuk mendeteksi kebakaran secara dini. Kejadian kebakaran
karena terpenuhinya 3 unsur ( fire chain )
Sensor pendeteksi api (fire detector) Terdiri dari beberapa macam yaitu :
1. Detektor nyala api (Flame Detector)
Flame Detector adalah alat yang sensitif terhadap radiasi sinar ultraviolet yang ditimbulkan
oleh nyala api. Tetapi detector ini tidak bereaksi pada lampu ruangan, infra merah atau sumber
cahaya lain yang tidak ada hubungannya dengan nyala api (flame).
2. Detektor Panas (Heat Detector)
Alat yang merespon terhadap perubahan suhu ruang. Biasanya, jika suhu lingkungan naik di
atas yang telah ditetapkan, ambang sinyal alarm akan terpicu.
3. Detektor asap (Smoke Detector)
Smoke Detector mendeteksi asap yang masuk ke dalamnya. Asap memiliki partikel-
partikel yang kian lama semakin memenuhi ruangan smoke (smoke chamber) seiring dengan
meningkatnya intensitas kebakaran. Jika kepadatan asap ini (smoke density) telah melewati
ambang batas (threshold), maka rangkaian elektronik di dalamnya akan aktif.
29

Gambar 2.35 Blok diagram sistem
Di bagian pengirim sensor api (flame detector ) yang terdiri dari 3 bagian yaitu Detektor
Nyala Api ( Flame Detector ), Detektor Panas ( Heat Detector), Smoke Detector mendeteksi
terjadinya kebakaran . Selanjutnya, sensor tersebut akan mengirimkan sinyal logika ke
mikrokontroler Apabila sensor api mendeteksi panas dari munculnya nyala api di area pengirim,
maka sensor tersebut akan mengirimkan sinyal logika ”1” atau high ke mikrokontroller untuk
mengarahkan dimana letak nyala api bersamaan dengan menggunakan motor servo.
Setelah mendeteksi adanya nyala api, mikrokontroller akan mengaktivkan wipper melalui
rangkaian IC ULN2003 yang difungsikan sebagai driver motor dengan memberikan kondisi
keadaan high guna menyemprotkan air ke area yang terindikasi adanya bahaya kebakaran.
Kemudian di bagian penerima, mikrokontroller akan menerima sinyal dari
mikrokontroller di bagian pemancar untuk mengirimkan pesan logika terhadap buzzer atau alarm
agar berbunyi, serta menampilkan pesan tulisan tanda bahaya ”Kebakaran” melalui LCD.
Setelah itu apabila api terdeteksi padam maka sensor akan mengirimkan kembali sinyal
ke mikrokontroller logika ”0” atau ”low” untuk memberhentikan sistem kerja dari wipper di area
pengirim, serta mikrokontroller dibagian penerima akan mematikan alarm dan menampilkan
pesan tulisan ”Aman” serta ”Awas!! Lantai basah” melalui LCD, guna mengetahui kondisi yang
ada di dalam prototype ruangan tersebut.
30

Karakteristik dari beberapa jenis Flame Detector
a. Detektor Nyala Api ( Flame Detector )
Flame Detector ini menunjukkan performa yang sangat bagus. Respon detector terbilang
cepat saat korek api dinyalakan dalam jarak 3 - 4m. Oleh sebab itu, pemasangan di pusat
keramaian dan area publik harus sedikit dicermati. Jangan sampai orang yang hanya menyalakan
pemantik api (lighter) di bawah detector dianggap sebagai kebakaran. Bisa juga dipasang di
ruang bebas merokok (No Smoking Area) asalkan bunyi alarm-nya hanya terjadi di ruangan itu
saja sebagai peringatan bagi orang yang "membandel".
Sensor UV-Tron akan mengeluarkan logika high (1) jika ia mendeteksi keberadaan api
dan sebaliknya sensor UV-Tron akan mengeluarkan logika low (0) jika ia tidak mendeteksi api,
anda bisa mengecek keluarannya dengan multimeter analog. Perlu diketahui, output yang
dikeluarkan adalah sinyal kotak dengan frekuensi yang bergantung pada kapasitor yang
digunakan pada driver. Pemilihan kapasitor driver harus disesuaikan dengan kebutuhan, jika kita
ingin mendapatkan output dengan sampling yang lebih cepat maka gunakan kapasitor dengan
kapasitansi yang lebih kecil (biasanya 0.01 µF), sebaliknya jika ingin sampling yang lebih
lambat gunakan kapasitansi kapasitor yang lebih besar (misal 1 µF). Biasanya nilai kapasitansi
0.01 µF memiliki periode sampling 0.01s begitupun untuk 1 µF memiliki periode sampling 1s.
Bentuk fisik Detektor nyala api dapat di lihat pada Gambar di bawah ini :
Gambar 2.36 Detektor Nyala Api ( Flame Detector )
b. Detektor Panas ( Heat Detector)
Detektor panas adalah alat deteksi kebakaran bahwa rasa panas yang dihasilkan oleh
pembakaran. Mereka dapat memicu alarm bila kenaikan suhu-cepat terdeteksi, atau suhu preset
31

tercapai.Produk yang dirancang untuk langit-langit mounting mungkin sesuai dengan pedoman
dari National Fire Protection Association (NFPA), sebuah lembaga nirlaba yang menerbitkan
kode pencegahan kebakaran dan standar. Menurut National Fire Alarm Code (NFPA 72), panas
detektor pada langit-langit halus harus berjarak 50 sq ft atau kaki persegi 2500 terpisah. Jika
tidak, jarak untuk detektor panas tergantung pada faktor-faktor seperti tinggi langit-langit dan
gerakan udara. detektor panas Kebanyakan perangkat mekanik dengan rangkaian tunggal atau
ganda.
Beberapa berisi sensor suhu-suhu tetap. Lain memiliki kombinasi fixed-suhu / rate-of-
bangkit sensor termal. Kedua jenis detektor panas dirancang untuk mengirim sinyal listrik ke
panel kontrol untuk memicu alarm. Tingkat-detektor panas-bangkit dengan deteksi panas tetap
mungkin berisi thermistor-dual, panas-sensing sirkuit yang memicu alarm pada suhu untuk
merespon kenaikan temperatur derajat-per-menit. Dalam detektor panas non-programmable,
suhu ditetapkan adalah baik 135 F (57 C) atau 194 F (90 C). Biasanya, peningkatan suhu yang
memicu alarm adalah 15 F per menit. Memilih detektor panas yang membutuhkan analisis
spesifikasi produk. Parameter Kinerja meliputi operasi tegangan atau alarm ini, siaga saat ini,
sensitivitas, berat, ukuran, bahan konstruksi, suhu operasi, rentang kelembaban, udara rating
kecepatan, dan spasi. Parameter untuk dasar mounting termasuk tipe loop (2-wire atau 4-kawat),
jenis alarm kontak, tegangan nominal, dan menarik arus alarm.
Beberapa detektor panas termasuk braket mounting reversibel untuk dipasang pada 3,5
masuk atau 4 masuk segi delapan, geng tunggal, atau kotak persegi. Kabel koneksi dapat dibuat
dengan sekrup SEM dan 14-22 kawat AWG. Biasanya, detektor panas mengandung tanda
alfanumerik di rumah mereka yang menggambarkan penilaian suhu dan metode aktivasi.
detektor panas dapat terdaftar oleh Underwriters Laboratories (UL) dan disetujui oleh lain
laboratorium pengujian independen atau perusahaan asuransi komersial. Sebagai contoh, FM
Persetujuan dari Global FM dapat diberikan kepada deteksi kebakaran, sinyal dan Peralatan
listrik lainnya. PERSETUJUAN FM salah satu dari sejumlah relatif kecil laboratorium yang
mengesahkan detektor api, percikan detektor, detektor panas dan peralatan pemadaman
kebakaran.
Bentuk fisik detektor panas dapat di lihat pada Gambar di bawah ini :
32

Gambar 2.37 Fisik Heat Detector
Detektor panas ( Heat detector ) ada dua macam yaitu ROR Detector dan Fixed Heat
Detector.
ROR (rate of rise) akan bekerja berdasarkan suatu kontak mekanik ( switch ),yang
dikontrol oleh dua jenis logam ( bimetal ) yang dibentuk sedemikian rupa,sehingga switch selalu
dalam keadaan OFF bila kondisi normal. Apabila detektor menerima panas sampai titik yang
telah ditentukan maka bimetal akan memuai,sehingga switch akan ON dan ini berarti detektor
sedang mendeteksi panas. Selaincara kerja seperti diatas detektor ini juga akan langsung
aktif ON bila kenaikan lebihdari 10 derajat selsius per menit tanpa menunggu temperatur
mencapai titik yang telahditentukan (rate of rise). Untuk ruangan yang sudah cukup panas ROR
tidak cocok digunakan karena mudah terjadi false alarm.
Detektor panas tetap (fixed Heat detector) bekerja berdasarkan kontak mekanik (switch),
dimana suatu penahan yang diletakkan dengan bahan perekat khusus, akan membuat switch
selalu dalam keadaan OFF bila kondisi normal.Apabila detektor menerima panas pada titik yang
telah ditentukan maka bahan perekattersebut akan mencair yang mengakibatkan penahan
otomatis lepas sehinggamembuat switch berubah ke posisi ON, dan ini berarti detektor
mendeteksi panas.Perubahan switch dari posisi OFF ke posisi ON akan segera diteruskan ke
panelsebagai indikasi fire. Jenis bahan perekat yang dipakai akan menentukan
33

padatemperatur/suhu berapa detektor akan mulai aktif, jadi titik temperatur kerjanya,selalu tetapi
tidak dipengaruhi oleh kecepatan kenaikan temperatur/suhu.
c. Smoke Detector
Sensor asap AF-30 mempunyai tingkat sensitifitas yang tinggi terhadap dua jenis gas
tersebut. Jika sensor tersebut mendeteksi keberadaan gas-gas tersebut diudara dengan tingkat
konsentrasi tertentu, maka sensor akan menganggap terdapat asap rokok di udara. Ketika sensor
mendeteksi keberadaan gas-gas tersbut maka resistansi elektrik sensor akan turun seperti yang
telah dibahas pada artikel lalu. Dengan memanfaatkan prinsip kerja dari sensor asap AF-30 ini,
kandungan gas-gas tersebut dapat diukur.
Gambar 2.38 Grafik Sensifitas Smoke Detector
Gambar atas ialah grafik tingkat sensitifitas sensor asap AF-30 terhadap kedua gas tersebut.
Dari grafik pada gambar diatas dapat dilihat bahwa dengan mengukur perbandingan
antara resistansi sensor pada saat terdapat gas dan resistansi sensor pada udara bersih atau tidak
mengandung gas tersebut (Rgas/Rair), dapat diketahui kadar gas tersebut. Sebagai contoh jika
resistansi sensor (RS) pada saat terdapat gas Hydrogen adalah 1KW dan resistansi sensor (RS)
pada saat udara bersih adalah 10KW
34

Menurut grafik pada gambar 1, jika Rgas/Rair=0.1 maka konsentrasi gas Hydrogen pada
udara adalah sekitar 100ppm. Untuk mengetahui besarnya resistansi sensor (RS) saat udara
bersih dapat dihitung menggunakan rumus:
Sebagai contoh jika Vout pada saat udara bersih adalah 2,8V dan RL yang digunakan
adalah 10KW maka dengan rumus diatas diperoleh RS saat udara bersih (Rair) adalah
7857,14W atau 7857W. Dari hasil perhitungan diatas diperoleh RL=10KW, RS saat udara
bersih (Rair)=7857W, dengan Vout saat udara bersih = 2,8V.
Dengan melihat grafik gambar 1 dan hasil perhitungan diatas, maka nilai Vout untuk tiap-
tiap nilai perbandingan Rgas/Rair dapat diketahui sehingga tingkat konsentrasi dari gas tersebut
juga diketahui pula. Misalnya untuk gas Hydrogen dengan tingkat konsentrasi 10ppm, dari grafik
gambar 1 Rgas/Rair @ 0,29 maka
Rgas/Rair @ 0,29
Rair = 7857W
Rgas = Rair x (Rgas/Rair)
= 7857W x 0,29
= 2279W
Dari hasil perhitungan diatas diperoleh nilai Rgas pada saat konsentrasi gas Hydrogen
10ppm. Karena Rgas adalah sama dengan resistansi sensor (RS), maka berdasarkan nilai Rgas
yang diperoleh tersebut, maka dari rumus mencari nilai RS, nilai Vout pada saat konsentrasi
Hydrogen 10ppm dapat diperoleh:
Rgas = 2279W
Vc = 5V
RL = 10KW
2279W = Vout = 4,072V
Jadi nilai Vout pada saat sensor mendeteksi nilai konsentrasi Hydrogen 10ppm adalah
sebesar 4,072V. Dengan cara yang sama dapat diperoleh nilai-nilai Vout untuk tiap-tiap tingkat
konsentrasi gas Hydrogen dan Ethanol sesuai dengan grafik gambar 1. Dari nilai-nilai Vout
tersebut didapatkan tabel perubahan nilai Vout.
Bentuk fisik detektor asap dapat di lihat pada Gambar di bawah ini :
35

Gambar 2.39 Fisik Smoke Detektor
Smoke Detector mendeteksi asap yang masuk ke dalamnya. Asap memiliki partikel-
partikel yang kian lama semakin memenuhi ruangan smoke (smoke chamber) seiring dengan
meningkatnya intensitas kebakaran. Jika kepadatan asap ini (smoke density) telah melewati
ambang batas (threshold), maka rangkaian elektronik di dalamnya akan aktif. Oleh karena berisi
rangkaian elektronik, maka Smoke memerlukan tegangan. Pada tipe 2-Wire tegangan ini
disupply dari panel Fire bersamaan dengan sinyal, sehingga hanya menggunakan 2 kabel saja.
Sedangkan pada tipe 4-Wire (12VDC), maka tegangan plus minus 12VDC-nya disupply dari
panel alarm biasa sementara sinyalnya disalurkan pada dua kabel sisanya. Area proteksinya
mencapai 150m2 untuk ketinggian plafon 4m.
Pertanyaan yang sering diajukan adalah di area mana kita menempatkan Smoke dan di
area mana kita menempatkan Heat. Apabila titik-titiknya sudah ditetapkan secara detail oleh
Konsultan Proyek, maka kita harus mengikuti gambar titik yang diberikan.
Jika diperkirakan di area tersebut saat awal terjadi kebakaran lebih didominasi hembusan
panas ketimbang kepulan asap, maka tempatkanlah Heat Detector. Contoh: ruang filing cabinet,
gudang spare parts dari logam (tanpa kardus), bengkel kerja mekanik dan sejenisnya. Sebaliknya
jika didominasi asap, sebaiknya memasang Smoke. Contoh: ruangan no smoking area yang
beralas karpet (kecuali kamar hotel), gudang kertas, gudang kapas, gudang ban, gudang
makanan-minuman (mamin) dan sejenisnya.
Jenis Smoke Detector:
a. Ionisation Smoke Detector yang bekerjanya berdasarkan tumbukan partikel asap dengan
unsur radioaktif yang berada di dalam ruang detector (smoke chamber).
36

b. Photoelectric Type Smoke Detector (Optical) yang bekerjanya berdasarkan pembiasan
cahaya lampu LED di dalam ruang detector oleh adanya asap yang masuk dengan
kepadatan tertentu.
Smoke Ionisasi cocok untuk mendeteksi asap dari kobaran api yang cepat (fast flaming
fires), tetapi jenis ini lebih mudah terkena false alarm, karena sensitivitasnya yang tinggi. Oleh
karenanya lebih cocok untuk ruang keluarga dan ruangan tidur.
Smoke Optical (Photoelectric) lebih baik untuk mendeteksi asap dari kobaran api kecil,
sehingga cocok untuk di hallway(lorong) dan tempat-tempat rata. Jenis ini lebih tahan terhadap
false alarm dan karenanya boleh diletakkan di dekat dapur.
37

BAB III
PENUTUP
3.1. Kesimpulan
1. Sensor dapat dikategorikan ke beberapa jenis yaitu :
a) sensor posisi
b) sensor suhu
c) sensor cahaya
d) sensor aliran
e) sensor tekanan
f) sensor jarak
g) sensor kelembaban
2. Untuk lebih memahami karakteristik masing-masing sensor pembaca dapat
mengaplikasikan masing-masing sensor ke dalam plant nyata.
3. Pengkategorian sensor didasarkan pada input ke sensor dan perubahan yang terjadi di
dalam sensor akibat perubahan gejala fisik.
4. Salah satu pengkondisi sinyal yang banyak dijumpai pada sensor diantaranya jembatan
wheastone dan Operasional Amplifier untuk mengubah sinyal ke kondisi tertentu.
38


















