Vibration - Freeplay
6
Den Hartog Method for Determining Equivalent Linear Spring Constant in the Presence of Freeplay The following derivation is a reiteration of the method employed in Chapter 8 “Mechanical Vibrations” by J.P. Den Hartog (see clearances) to de rive the equivalent spring stiffness for a generalized freeplay system where the freeplay region is not necessarily zero, but ha s some reduced stiffness value. The undamped, free vibration of a linear single degree of freedom is governed by the following equation of motion (EOM): (1) Consider the transformation of the acceleration into terms of the velocity and displacement. (2) Through this transformation equation (1) can be separated into independent velocity and displacement terms. The expression is then straight f orward to integrate. (3) Equation (3) describes a circle of radius about the origin , where the magnitude is determined from the initial conditions , and .
-
Upload
sean-mortara -
Category
Documents
-
view
220 -
download
0
Transcript of Vibration - Freeplay

8/14/2019 Vibration - Freeplay
http://slidepdf.com/reader/full/vibration-freeplay 1/6
Den Hartog Method for Determining Equivalent Linear
Spring Constant in the Presence of Freeplay
The following derivation is a reiteration of the method employed in Chapter 8 “Mechanical Vibrations”
by J.P. Den Hartog (see clearances) to derive the equivalent spring stiffness for a generalized freeplay
system where the freeplay region is not necessarily zero, but has some reduced stiffness value.
The undamped, free vibration of a linear single degree of freedom is governed by the following equation
of motion (EOM):
(1)
Consider the transformation of the acceleration into terms of the velocity and displacement.
(2)
Through this transformation equation (1) can be separated into independent velocity and displacement
terms. The expression is then straight forward to integrate.
(3)
Equation (3) describes a circle of radius about the origin , where the magnitude is
determined from the initial conditions , and .
8/14/2019 Vibration - Freeplay
http://slidepdf.com/reader/full/vibration-freeplay 2/6
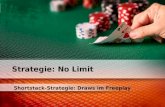
Consider the following nonlinear spring constant function and its respective EOM.
(4)
While the amplitude of vibration is less than the EOM is a linear equation of the first spring constant
only and the solution is then the concentric circle described above (assuming a normalized velocity of
). For motions that will exceed the EOM is piece wise linear in that for amplitudes
above the solution is described by elliptical sections (with respect to ; this would be circular if
the velocity axis were normalized as , but then the inner section would be elliptical). These
sections are centrally located about the points where the combined spring constants would intersect the
displacement axis (indicated by the magnitude ).
P
k 1
k 2
a
Force
x

8/14/2019 Vibration - Freeplay
http://slidepdf.com/reader/full/vibration-freeplay 3/6
At the circular sections intersect continuously. The overall size of the formed motion path about the
origin is again dictated by the initial conditions of the solution. Depending on where the initial
conditions are one of the two circle radii can be determined directly as in the linear system – equation
(3). Given:
(5)
Taking the derivative of the velocity with respect to the displacement yields:
(6)
These two functions are required to be equal at in order for Eq (5) to be continuous.
(7)
(8)

8/14/2019 Vibration - Freeplay
http://slidepdf.com/reader/full/vibration-freeplay 4/6
(9)
Noting that :
(10)
Consider a small section of a described path.
or (11)
The time it takes to go about a portion of this path can be determined by integrating equation (11).
Therefore, one period of oscillation, , can be found by integrating to the limits of the entire path.
(12)
The dependant variable is expressed as:
(13)
Since the periodic motion is symmetric about the velocity and displacement axis equation (12) can be
integrated over a single quadrant and multiplied by 4 to give the total period of oscillation. The
piecewise function then only needs to be evaluated once for each section. Since both pieces take on the
same form it would be convenient to integrate once generally and apply the respective limits
individually.
(14)

8/14/2019 Vibration - Freeplay
http://slidepdf.com/reader/full/vibration-freeplay 5/6
(15)
(16)
(17)
Note that is used to identify the maximum displacement. From the period of oscillation it is
relatively straight forward to calculate an equivalent frequency for the system, and utilizing some of the
relationships presented above arrive at an equivalent spring stiffness that is a function of the known
values and the assumed amplitude of oscillation.
(18)
(19)
(20)
This is the general derivation for a nonlinear spring of this type; however, it is important to note two
special cases. The first is where ( ). The resulting equivalent stiffness can then be
simplified to equal the linear stiffness as it should.

8/14/2019 Vibration - Freeplay
http://slidepdf.com/reader/full/vibration-freeplay 6/6
(21)
The second case is that in which ( ) signifying an open gap clearance. The second term in
the denominator drops out completely, but the third term requires a little more observation.
(22)
First it can be noted that only one term in the denominator of the function remains significant.
(23)
The factor in front of the function is becoming infinitely large; however, since the function is
very close to zero it can be equated to the inside function itself thus:
(24)
Substituting back into equation (20) reduces the expression to that presented by Den Hartog.
(25)