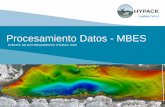
Vertical surface processing from integrated MBES – lidar data
61
Vertical surface processing from integrated MBES –lidar data Eli Leblanc, Mathieu Rondeau & Jean-Guy Nistad CARIS 2012
description
CARIS 2012. Vertical surface processing from integrated MBES – lidar data. Eli Leblanc, Mathieu Rondeau & Jean-Guy Nistad. Introduction. In the last few years, CIDCO has been developing expertise in port infrastructure inspection - PowerPoint PPT Presentation
Transcript of Vertical surface processing from integrated MBES – lidar data

Vertical surface processing from integrated MBES –lidar data
Eli Leblanc, Mathieu Rondeau & Jean-Guy Nistad
CARIS 2012

Introduction
• In the last few years, CIDCO has been developing expertise in port infrastructure inspection
– Current method: subjective and partial observations from divers
– CIDCO method: objective, full coverage and efficient sonar-lidar 3D dataset

Introduction

Introduction
• For the first time, port management bodies have a full view of the submerged part of their structures
• Precious information tobetter plan maintenanceand repair

Introduction
• 3D points cloud is not easily usable by engineers
• Uncertainty on the sonar 3D dataset exceeds the clients specifications of 5 cm
• Vertical surfaceprocessing is not yetsupported in CARIS HIPS

Introduction
• 3D points cloud is not easily usable by engineers
• Uncertainty on the sonar 3D dataset exceeds the clients specifications of 5 cm
• Vertical surfaceprocessing is not yetsupported in CARIS HIPS

Introduction
• 3 solutions were tested1) Vessel file roll bias (HIPS)
2) Inverse-distance WMA filter (HIPS-Matlab)
3) XTF files rotation (Matlab-HIPS)

Dataset
• Port of Montréal• November 2011• 30° tilted MBES Reson Seabat 7125 • Data recorded in xtf format

Dataset
GPS
LiDARScanner
Camera
IMU
Reson 7125 SV30° starboard tilted
ALMIS 350

Dataset

1) Vessel file roll bias
• 90° roll bias applied to the vessel file during merging → HIPS
• BASE surface → HIPS

1) Vessel file roll bias
• Original sonar data (observed depths)

1) Vessel file roll bias
• Step 1: 90° roll bias in the vessel file

1) Vessel file roll bias
• Step 1: Sound velocity correction

1) Vessel file roll bias
• Step : Merge the line (processed depths)

1) Vessel file roll bias
• Step 3: Merge the line

1) Vessel file roll bias
• Step 4: Remove the seabed

1) Vessel file roll bias
• Step 5: Create a BASE surface– Swath angle, 10 cm

1) Vessel file roll bias
• Limits– Roll bias applied in sonar referential at each
ping rather than at a fixed rotation point• Distortion• Impossible to process multiple lines

1) Vessel file roll bias
• Limits– Roll bias applied in sonar referential at each
ping rather than at a fixed rotation point• Distortion• Impossible to process multiple lines

2) Inverse-distance WMA filter
• Data merging → HIPS
• Filtering and surface meshing → Matlab

2) Inverse-distance WMA filter
• Step 1: Export merged data from HIPS and load them in Matlab

• Step 2: Remove the seabed (depth threshold)
2) Inverse-distance WMA filter

• Step 2: Model the infrastructure axis and rotate around z
2) Inverse-distance WMA filter
θaxis
y
x

2) Inverse-distance WMA filter
• Inverse-distance weight moving average filter (10 cm, r = 14.14 cm)
Infrastructure axis (m)
Alti
tude
(m
)
20 40 60 80 100 120 140
-6-4-20
-0.500.5
Infrastructure axis (m)
Alti
tude
(m
)
65 70 75 80 85 90 95 100 105 110 115
-6
-4
-2
0
-0.5
0
0.5

2) Inverse-distance WMA filter
• Limits of the method– Costly in computation time
• 4 lines = 150 m = 750 000 soundings = 30 minutes
– Possible memory problems for larger datasets– No shadow effects or texture
Infrastructure axis (m)
Alti
tude
(m
)
65 70 75 80 85 90 95 100 105 110 115
-6
-4
-2
0
-0.5
0
0.5

3) XTF files rotation
• 90° rotation applied on xtf files → Matlab
• Data cleaning, merging and BASE surface → HIPS

• Step 1: Extract fields from xtf files– For each swath
• x-y coordinates• Pitch, roll, heave,
heading
– For each sounding• Two-way travel time• Angle
3) XTF files rotation
(x,y)z
yx
(t,θ)
θ t

• Step 2: Model the infrastructure axis and rotate around z
3) XTF files rotation
θaxis
θheading θ'heading
axisheadingheading '
y
x

• Step 3: Compute range
3) XTF files rotation
2
ctR
z
y
x
heav
e
(x,y)sonar
(t,θ)sounding
θ
R

3) XTF files rotation
• Step 4: Project (x,y)sonar across swathz
y
x
heav
e
(x,y)sonar
(x,y,z)sounding
θ
sonarsounding xx
sinRysounding
heaveRz cos R

• Step 5: Rotate around x (90°)
3) XTF files rotation
z
yx
yz
zy
z
yx
90°

• Step 5: Rotate around x (90°)
3) XTF files rotation
z
yx
yz
zy
z
yx
90°

• Step 5: Rotate around x (90°)
3) XTF files rotation
z
yx
yz
zy
z
yx
90°

• Step 6: Edit θ
3) XTF files rotation
z
y
x
θ'
θ
)90('

• Step 7: Edit navigation - (x,y)sonar
– x coordinates → infrastructure axis
3) XTF files rotation
y'
x'

• Step 7: Edit navigation - (x,y)sonar
– y coordinates
3) XTF files rotation
90°
y
zx
z
yx
sonaryheave '

• Step 7: Edit navigation - (x,y)sonar
– y coordinates
3) XTF files rotation
(x,y)’sonar
''' sinRyy soundingsonar
z
y
x
R(x,y,z)’sounding
θ'
θ heaveRz
zy sounding
cos
'

• Step 8: Edit attitude angles (Pitch)– x-z plane– x to horizontal axis
3) XTF files rotation
z
yx
z
xy
θpitch

• Step 8: Edit attitude angles (Pitch)– x-z plane– x to horizontal axis
3) XTF files rotation
90°
z
xy
z
xy
θpitch

• Step 8: Edit attitude angles (Pitch)– x-z plane– x to horizontal axis
3) XTF files rotation
z
xy
z x
y
θpitch
θ’heading
pitchheading 90'

• Step 8: Edit attitude angles (Heading)– x-y plane– y to horizontal axis
3) XTF files rotation
y
z x
y
z x
θheading

• Step 8: Edit attitude angles (Heading)– x-y plane– y to horizontal axis
3) XTF files rotation
90°
θheading
y
z x
y
z x

• Step 8: Edit attitude angles (Heading)– x-y plane– y to horizontal axis
3) XTF files rotation
z
y x
θheading
θ'pitch
y
z x
)90(' headingpitch

• Step 8: Edit attitude angles (roll)– y-z plane– z to vertical axis
3) XTF files rotation
z
yx
z
yx
θroll

• Step 8: Edit attitude angles (roll)– y-z plane– z to vertical axis
z
yx
θroll
3) XTF files rotation
z
yx
θ'roll
rollroll '
90°

• Step 9: Edit fields to create new xtf files– For each swath
• x-y coordinates• Pitch, heave, heading
– For each sounding• Beam angle
3) XTF files rotation

3) XTF files rotation
• Step 10: Create a BASE surface in HIPS– Swath angle, 10 cm

3) XTF files rotation
• Limits of the method– Sound velocity cannot be corrected in HIPS
• SVC in Matlab would imply correcting for attitude
– TPU would have to be investigated to use CUBE

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation
Complexity of implementation Low Medium High

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation
Complexity of implementation Low Medium High
Processing time Low Very high Medium

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation
Complexity of implementation Low Medium High
Processing time Low Very high Medium
Distorsion Yes No No

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation
Complexity of implementation Low Medium High
Processing time Low Very high Medium
Distorsion Yes No No
SVC Yes Yes No

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation
Complexity of implementation Low Medium High
Processing time Low Very high Medium
Distorsion Yes No No
SVC Yes Yes No
Multiple lines No Yes Yes

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation
Complexity of implementation Low Medium High
Processing time Low Very high Medium
Distorsion Yes No No
SVC Yes Yes No
Multiple lines No Yes Yes
Detailed view Yes No Yes

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation
Complexity of implementation Low Medium High
Processing time Low Very high Medium
Distorsion Yes No No
SVC Yes Yes No
Multiple lines No Yes Yes
Detailed view Yes No Yes
Texture Yes No Yes

Discussion
• Comparison of methodsMethod 90° roll bias WMA filter XTF rotation
Complexity of implementation Low Medium High
Processing time Low Very high Medium
Distorsion Yes No No
SVC Yes Yes No
Multiple lines No Yes Yes
Detailed view Yes No Yes
Texture Yes No Yes
CUBE Yes No No

Discussion
• Comparison of methods
90° roll bias
Infrastructure axis (m)
Alti
tude
(m
)
30 40 50 60 70 80
-6
-4
-2
0
-0.5
0
0.5
WMA filter
XTF rotation

Conclusion
• 3 methods were tested to process vertical surfaces– 1) Vessel file roll bias (HIPS)
• Distorsion makes it unusable
– 2) Inverse-distance WMA filter (HIPS-Matlab)• Long to process• Less details and no texture
– 3) XTF files rotation (Matlab-HIPS)• Promising• Needs further development (SVC,CUBE,LAS)

Questions?