
Vektorov a a tenzorov a analyza - vsb.czmdg.vsb.cz/portal/m4/VTA17.pdf · Vektorov a a tenzorov a...
58
Vektorov´ a a tenzorov´ a anal´ yza studijn´ ı text Jaroslav Vlˇ cek Katedra matematiky a deskriptivn´ ı geometrie V ˇ SB-TU Ostrava 19.z´aˇ r´ ı 2017
Transcript of Vektorov a a tenzorov a analyza - vsb.czmdg.vsb.cz/portal/m4/VTA17.pdf · Vektorov a a tenzorov a...

Vektorova a tenzorova analyza
studijnı text
Jaroslav VlcekKatedra matematiky a deskriptivnı geometrie
VSB-TU Ostrava
19. zarı 2017

2
Obsah
1 Kartezske tenzory 5
1.1 Zakladnı pojmy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Bodove-vektorovy prostor . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.2 Zmena baze v Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.3 Linearnı zobrazenı v Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Ortogonalnı transformace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.1 Ortonormalnı baze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.2 Ortogonalnı matice a jejich vlastnosti . . . . . . . . . . . . . . . . . . . . 8
1.2.3 Linearnı zobrazenı pri ortogonalnı transformaci . . . . . . . . . . . . . . . 9
1.3 Kartezske tenzory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.1 Zavedenı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.2 Operace s tenzory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.3 Specialnı vlastnosti tenzoru . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4 Tenzory v aplikacıch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4.1 Materialova anizotropie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4.2 Tenzor napetı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4.3 Piezoeektricky jev . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5 Tenzory 2. radu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5.1 Hlavnı smery a invarianty tenzoru 2. radu . . . . . . . . . . . . . . . . . . 16
1.6 Levi-Civituv tenzor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.6.1 Zavedenı a zakladnı vlastnosti . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.6.2 Cvicenı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2 Zaklady tenzorove analyzy 21
2.1 Uvodnı pojmy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.1 Skalarnı funkce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.2 Vektorove funkce jedne promenne . . . . . . . . . . . . . . . . . . . . . . . 23
2.1.3 Vektorove funkce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.1.4 Tenzorove funkce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2 Derivace tenzorove funkce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2.1 Derivace a diferencial tenzorove funkce . . . . . . . . . . . . . . . . . . . . 26
2.2.2 Diferencialnı operatory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2.3 Slozene operatory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2.4 Tenzor deformace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.3 Krivkove a plosne integraly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3.1 Krivkove integraly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3.2 Plosne integraly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3.3 Integralnı vety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3
4 OBSAH
2.4 Charakteristiky tenzorovych polı . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.4.1 Globalnı charakteristiky . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.4.2 Lokalnı charakteristiky . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.4.3 Prıklad – Maxwellovy rovnice . . . . . . . . . . . . . . . . . . . . . . . . . 402.4.4 Nezavislost na integracnı ceste . . . . . . . . . . . . . . . . . . . . . . . . 41
3 Aplikace tenzoroveho aparatu 433.1 Tenzor setrvacnosti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.2 Staticka teorie elasticity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.2.1 Motivace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.2.2 Specialnı prıpady tenzoru napetı . . . . . . . . . . . . . . . . . . . . . . . 463.2.3 Rovnice kompatibility deformacı . . . . . . . . . . . . . . . . . . . . . . . 47
3.3 Zobecneny Hookeuv zakon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483.3.1 Zobecneny Hookeuv zakon . . . . . . . . . . . . . . . . . . . . . . . . . . . 483.3.2 Elasticke moduly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4 Rovnice mechaniky kontinua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.4.1 Podmınky rovnovahy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.4.2 Staticke rovnice pruznosti . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.4.3 Dynamicke rovnice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.4.4 Okrajove podmınky v ulohach pruznosti . . . . . . . . . . . . . . . . . . . 533.4.5 Proudenı nestlacitelnych tekutin . . . . . . . . . . . . . . . . . . . . . . . 54
3.5 Krystalove soustavy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.6 Umela anizotropie v optice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.6.1 Magnetoopticky jev . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57

Kapitola 1
Kartezske tenzory
1.1 Zakladnı pojmy
1.1.1 Bodove-vektorovy prostor
Bodove-vektorovy prostor obsahuje body X = [x1, x2, . . . , xn], Y = [y1, y2, . . . , yn] atd. a vek-tory u = (u1, u2, . . . , un), v = (v1, v2, . . . , vn), respektive u> apod., jedna-li se o sloupcovevektory. Bude-li hrat roli umıstenı vektoru, priradıme dvojici bodu X, Y vektor u = XY =(y1 − x1, y2 − x2, . . . , yn − xn). Souradnice bodu, resp. slozky vektoru tvorı n-tice realnych (R)nebo komplexnıch (C) cısel. Proto budeme prostor oznacovat jednoduse Rn, resp. Cn. Cıslo npredstavuje dimenzi prostoru, obvykle bude n = 2 nebo n = 3.
Operace v Rn
1. scıtanı vektoru: (u+ v)i = ui + vi,
2. nasobenı vektoru cıslem: (a.u)i = a.ui, a ∈ R.
Linearita Rn
∀ u, v ∈ Rn ∀ a1, a2 ∈ R a1u+ a2v ∈ Rn .
Skalarnı soucin vektoru
u · v = u1v1 + u2v2 + · · ·+ unvn =n∑i=1
uivi .
Metricke vlastnostiVelikost (norma) vektoru:
‖u‖ =√u · u =
(n∑i=1
u2i
) 12
,
Smerove kosiny (= kosiny uhlu, ktere vektor svıra se souradnymi osami):
cosαi =ui‖u‖
,
Geometricka interpretace skalarnıho soucinu (α. . . odchylka vektoru):
u · v = ‖u‖.‖v‖. cosα ,
Ortogonalita: u · v = 0⇐⇒ u ⊥ v (u, v 6= o ) .Vzhledem k uvedenym vlastnostem je Rn metricky linearnı prostor se skalarnım soucinem.
5

6 KAPITOLA 1. KARTEZSKE TENZORY
1.1.2 Zmena baze v Rn
Je-li dana puvodnı baze h1, h2, . . . , hn, pak vektory nove baze h′1, h′2, . . . , h′n lze vyjadritjako linearnı kombinace vektoru puvodnı baze:
h′1 = a11h1 + a12h2 + · · ·+ a1nhn ,h′2 = a21h1 + a22h2 + · · ·+ a2nhn ,
· · ·h′n = an1h1 + an2h2 + · · ·+ annhn .
(1.1)
Koeficienty aij tvorı matici prechodu od puvodnı k carkovane bazi:
A =
a11 a12 · · · a1n
a21 a22 · · · a2n...
......
an1 an2 · · · ann
. (1.2)
Teto zmene baze odpovıda zmena souradnic libovolneho vektoru
u = (u1, u2, . . . , un) = u1h1 + u2h2 + · · ·+ unhn, (1.3)
na “carkovane”, takze vzhledem k (1.1) bude
u = (u′1, u′2, . . . , u
′n) = u′1h
′1 + u′2h
′1 + · · ·+ u′nh
′n =
= u′1(a11h1 + a12h2 + · · ·+ a1nhn) + · · ·+ u′n(an1h1 + an2h2 + · · ·+ annhn) . (1.4)
Porovnanım (1.3) a (1.4) dostavame soustavu
u1 = a11u′1 + a21u
′2 + · · ·+ an1u
′n ,
u2 = a12u′1 + a22u
′2 + · · ·+ an2u
′n ,
· · ·un = a1nu
′1 + a2nu
′2 + · · ·+ annu
′n
neboli u> = A>u′> .
Souradnice vektoru v nove bazi tedy zıskame resenımulohy
u′> =(A>
)−1u> , (1.5)
v nız hraje klıcovou roli matice prechodu mezi bazemi A.
1.1.3 Linearnı zobrazenı v Rn
Libovolna ctvercova matice T dimenze n zprostredkovava linearnı zobrazenı v prostoru Rn tak,ze vzoru u prirazuje jeho obraz v podle vztahu
v> = Tu> . (1.6)
Linearita spocıva ve skutecnosti, ze T zobrazuje linearnı kombinaci vektoru opet na jejich linearnıkombinaci, a to s tymiz koeficienty, nebot’
T(k1u1 + k2u2 + · · ·+ kmum) = k1Tu1 + k2Tu2 + · · ·+ kmTum = k1v1 + k2v2 + · · ·+ kmvm.
Je-li navıc matice T regularnı, tj. det(T) 6= 0, existuje inverznı matice T−1, ktera zprostredkujeinverznı zobrazenı
u> = T−1v> .

1.2. ORTOGONALNI TRANSFORMACE 7
Podıvejme se nynı, jak se zobrazovacı relace promenı pri zmene baze, popsane vztahem (1.5).Nahradıme-li v nem vsechny veliciny jejich obrazy, bude
v′> = T′u′> → (A>)−1v> = T′(A>)−1u> ,
tj.(A>)−1Tu> = T′(A>)−1u> .
Porovnanım obou stran zıskame transformovanou matici zobrazenı ve tvaru
T′ = (A>)−1TA> . (1.7)
1.2 Ortogonalnı transformace
1.2.1 Ortonormalnı baze
Baze e1, e2, . . . en v Rn se nazyva ortonormalnı, je-li soucasne ortogonalnı a jednotkova, tj.platı-li
|ei‖ = 1, ei · ej = δij =
1 , i = j ,0 , i 6= j .
. (1.8)
Zakladnı (standardnı) bazı nazyvame ortonormalnı bazi, pro niz (ei)j = δij , tj. i−ty vektor mavsechny slozky nulove s vyjimkou i−te, ktera je rovna jedne. Geometricky se jedna o smerovevektory souradnych os kartezskeho souradneho systemu v Rn.
Odvodıme matici prechodu od baze (1.8) k jine ortonormalnı bazi e′1, e′2, . . . e′n. Nejprvezapıseme vyjadrenı i−teho vektoru nove baze vzhledem k bazi puvodnı:
e′i = ai1e1 + ai2e2 + · · ·+ ainen =n∑j=1
aijej = aijej . (1.9)
Poslednı vyraz predstavuje zapis pomocı tzv. sumacnı konvence, ktera spocıva v tom, zepres index, ktery se ve vyrazu vyskytuje dvakrat, se automaticky scıta (od 1 do n), aniz se pısevyraz
∑. Pouzitı konvence je zrejme z nasledujıcıch ukazek:
uivi =n∑i=1
uivi = u·v , aijuj = ai1u1+ai2u2+· · ·+ainun , τii = τ11+τ22+τ33 =3∑i=1
τii (vR3) .
Vynasobıme-li skalarne vyjadrenı (1.9) vektoru nove baze vektorem ej baze puvodnı, dostavame
e′i · ej = aij ⇒ aij = ‖e′i‖.‖ej‖. cos(x′ixj) = cos(x′ixj). (1.10)
Tento vysledek znamena, ze koeficient aij predstavuje kosinus uhlu, ktery svıra i-ta nova osas j-tou puvodnı osou, coz nam umoznı blıze urcit vyznam koeficientu aij v matici prechodu A.
Zpetna transformace z carkovane baze do necarkovane ma tvar obdobny jako (1.9),
ej =3∑i=1
bjie′i = bjie
′i, (1.11)
kde bji = ej ·e′i = cos(xjx′i) jsou prvky matice B, jejız vlastnosti stanovıme. Protoze cos(xjx′i) =
cos(x′ixj), musı byt aij = bji, tj. B = A>. Jelikoz slozenou transformacı obdrzıme opet puvodnıbazi, musı platit A ·B = I, tudız
A ·A> = I neboli A> = A−1 , (1.12)
kde I je jednotkova matice. Matice s touto vlastnostı se nazyvajı ortonormalnı nebo (casteji ajednoduse) ortogonalnı.

8 KAPITOLA 1. KARTEZSKE TENZORY
1.2.2 Ortogonalnı matice a jejich vlastnosti
Je-li matice A ortogonalnı, pak
(1) det(A) = ±1,protoze det(A.B) = det(A).det(B) a soucasne det(A) = det(A>), musı byt pro orto-gonalnı matici det(A).det(A>) = det2(A) = 1, odkud plyne tvrzenı.
(2)∑i aikajk = aikajk = δij , aij .aik = δjk.
Slovy: skalarnı soucin dvou ruznych radku (dvou ruznych sloupcu) ortogonalnı matice jeroven nule, norma kazdeho radku (sloupce) je rovna jedne (v zapise je ukazano pouzitısumacnı konvence).
(3) Soucin matice A s jinou ortogonalnı maticı je opet ortogonalnı matice.Je-li C = A.B, pak C−1 = (A.B)−1 = B−1.A−1 = B>.A> = (A.B)> = C>.
Interpretujeme-li ortogonalnı matici geometricky ve smyslu (1.10), nasobenı touto maticıpredstavuje rotaci kartezskeho souradneho systemu kolem pocatku, jak ilustruje v R3 obr. 1.1.
x3
x2
x1’
x3’
x1
e3
e2e
1
e2’
e3’
e1’
x2’
Obrazek 1.1: Kartezsky souradny system puvodnı (plnou carou) a otoceny (carkovane).
Cvicenı
(a) Snadno lze ukazat, ze matice
A =
(cosφ − sinφsinφ cosφ
).
je ortogonalnı a predstavuje otocenı kolem pocatku v R2 o uhel φ v kladnem smeru.
(b) Rotaci v R3 kolem osy x3 o uhel α odpovıda matice
Rα =
cosα − sinα 0sinα cosα 0
0 0 1
,
podobne je rotace kolem osy x1 o uhel γ popsana maticı
Rγ =
1 0 00 cos γ − sin γ0 sin γ cos γ
.

1.2. ORTOGONALNI TRANSFORMACE 9
Slozenım techto rotacı v uvedenem poradı obdrzıme opet rotaci s ortogonalnı maticıR = Rα.Rγ . Vypoctete ji nejprve obecne a pak pro α = γ = π/2.
(c) Dokazte, ze matice A je ortogonalnı:
A =
1√2
12
12
− 1√2
12
12
0 − 1√2
1√2
.
1.2.3 Linearnı zobrazenı pri ortogonalnı transformaci
Ortogonalnı transformace vektoru
Nejprve ukazeme, jak se menı souradnice vektoru. Podle (1.5) je obecne u′> =(A>
)−1u>. Je-li
A ortogonalnı, pak(A>
)−1=(A>
)>= A, a proto se vektor u pri prechodu mezi ortogonalnımi
bazemi (tzn. pri rotaci souradneho systemu kolem pocatku) transformuje na vektor
u′> = Au> , tj. u′i = aijuj . (1.13)
Dusledkem je dulezite tvrzenı, ze pri ortogonalnı transformaci v prostoru libovolne di-menze se nemenı (je tzv. invariantnı) skalarnı soucin vektoru, jelikoz
u′ · v′ = u′iv′i = aijuj aikvk = aijaikujvk = δjkujvk = ujvj = u · v . (1.14)
Obraz matice linearnıho zobrazenıObdrzıme ho na zaklade relace (1.7), v nız uplatnıme definicnı vlastnost ortogonalnı matice A:
T′ = (A>)−1TA> = ATA> . (1.15)
V indexovem zapisu ma tento vysledek tvar
T ′ij = aikTklalj neboli T ′ij = aikajlTkl . (1.16)
Cvicenı
(d) Pri rotaci s maticı dle prıkladu (a) na strane 8 najdete obraz vektoru u = (2,√
3). Restenejprve obecne a pak pro uhel φ = π
3 .
(e) Je dan vektor b = (2, 1, 0). Proved’te jeho otocenı pomocı matice R z prıkladu (b) prouvedene uhly α, γ. Ukazte a graficky znazornete skutecnost, ze Rα.Rγ 6= Rγ .Rα.
(f) Linearnı zobrazenı je urceno maticı
T =
2 0 1−1 3 0
0 1 1
.
Odvod’te jejı obraz T′ pri rotaci souradneho systemu o uhel β = π/2 kolem osy x2.

10 KAPITOLA 1. KARTEZSKE TENZORY
1.3 Kartezske tenzory
Pouze nektere geometricke a fyzikalnı veliciny jsou invariantnı, tj. nemenı se pri zmene souradnehosystemu (naprıklad vsechny skalary a nektere dalsı veliciny). Pro ostatnı veliciny chceme stano-vit zpusob jejich popisu, ktery pri zvolenem typu transformace (napr. ortogonalnı) probıha vzdystejne. Tato motivace vede k pojmu TENZOR. Pripomıname, ze uvazujeme pouze ortogonalnıtransformace v kartezskych souradnych systemech. Ty jsou zprostredkovany ortogonalnımi ma-ticemi splnujıcımi podmınku (1.12).
1.3.1 Zavedenı
Pripomeneme dve dulezite formule (1.13) a (1.16) z predchozıho vykladu, ktere se tykajı orto-gonalnı transformace vektoru a matice. Zapıseme je v indexovane podobe za pouzitı sumacnıkonvence:
u′i = aijuj , T ′ij = aikajlTkl .
Uvazujme nynı zobrazenı W vektoru u na matici T ve tvaru
T = Wu> , tj. Tlm = Wlmnun .
Vysetrıme, jak se zobrazenı W chova pri ortogonalnı transformaci s maticı A. Obraz T′ = W′u′>
v indexovem vyjadrenı postupne upravıme pomocı vyse uvedenych transformacnıch vztahu:
T ′ij = W ′ijku′k → ailajmTlm = W ′ijkaknun → ailajmWlmnun = W ′ijkaknun .
Upravou poslednı relace zıskame konecny transformacnı predpis pro zobrazenı W:
W ′ijk = ailajmaknWlmn . (1.17)
Jak je patrno, s rostoucım radem (tj. poctem indexu) linearnıch zobrazenı roste odpovıdajıcımzpusobem pocet soucinu s ortogonalnı maticı A. Veliciny (objekty) s touto vlastnostı nazyvametenzory. Tvar transformacnıch vztahu nezavisı na dimenzi prostoru, v nemz zobrazenı probıha.Konkretne pak dochazıme k nasledujıcım definicım.
Usporadana n-tice u = (u1, u2, . . . , un), ktera pri ortogonalnı transformaci vyhovuje vztahu
u′i = aijuj (1.18)
se nazyva tenzor prvnıho radu neboli vektor. Matice T = (Tij), i, j = 1, . . . , n se nazyvakartezsky tenzor druheho radu, menı-li se jejı prvky pri ortogonalnı transformaci podle vztahu
T ′ij = aikajlTkl. (1.19)
Soubor velicin T = (Ti1i2···iM ), im = 1, . . . , n neboli M -rozmerna matice se nazyva kartezskytenzor M-teho radu, menı-li se jeho prvky pri ortogonalnı transformaci podle vztahu
T ′i1i2···iM = ai1j1ai2j2 . . . aiM jMTj1j2···jM . (1.20)
Poznamky
• skalar povazujeme za tenzor nulteho radu,
• pocet slozek tenzoru M -teho radu v Rn je roven nM ,

1.3. KARTEZSKE TENZORY 11
• kartezskym tenzorem 2. radu je kazda ctvercova matice, jejımiz prvky jsou cısla nebofunkce, tj.
T =
T11 T12 T13
T21 T22 T23
T31 T32 T33
,
• typickymi tenzorovymi velicinami (2. radu) jsou naprıklad napetı a deformace v mechanice,dyadicky soucin vektoru, materialove vlastnosti anizotropnıch prostredı apod.
PrıkladOverıme tenzorovy charakter dyadickeho soucinu vektoru W = u ⊗ v. Jedna se o ctvercovoumatici v v Rn s prvky Wkl = ukvl. Transformace podle (1.19) dava
W ′ij = u′iv′j = aikukajlvl = aikajlukvl = aikajlWkl,
coz jsme meli dokazat.
1.3.2 Operace s tenzory
(A) Slucovanı tenzoru (scıtanı, odcıtanı)Slucujeme soumıstne slozky tenzoru tehoz radu, tj. naprıklad
P + Q = R ⇔ Pijk +Qijk = Rijk apod.
(B) Nasobenı tenzoru cıslem (skalarem)Nasobıme kazdou slozku tenzoru, tj. naprıklad
P = kQ ⇔ Pijk = kQijk .
(C) Uzenı (kontrakce) tenzoruZe slozek tenzoru vybereme ty, ktere majı dva indexy stejne, a algebraicky je secteme; vysledkemje tenzor radu o dva nizsıho nez tenzor puvodnı. Jedna se tedy o princip sumacnı konvence.Prıkladne bude
Bijkj = Bi1k1 +Bi2k2 +Bi3k3 = Bik .
Uzenım tenzoru 2. radu vznikne skalar:
Tii = T11 + T22 + T33 = Tr(T) (“trace”– stopa matice).
(D) Nasobenı tenzoruRozlisujeme tzv. vnejsı a vnitrnı soucin.(D1) Vnejsı soucin. Nasobıme kazdou slozku prvnıho tenzoru postupne kazdou slozkou druhehotenzoru; vysledkem je tenzor, jehoz rad je roven souctu radu nasobenych tenzoru, napr.
P⊗Q = R ⇔ Pijk.Qlm = Rijklm apod.
Prıkladem je dyadicky soucin dvou vektoru v R3:
W = u⊗ v =
u1v1 u1v2 u1v3
u2v1 u2v2 u2v3
u3v1 u3v2 u3v3
neboli Wij = uivj .
(D2) Vnitrnı soucin. Vznikne uzenım vnejsıho soucinu, tj. aplikacı sumacnı konvence. Jakoprıklad uvazujme vnejsı soucin matice a vektoru, kterym je tenzor tretıho radu Tijuk = Wijk;

12 KAPITOLA 1. KARTEZSKE TENZORY
vnitrnım soucinem bude standardnı soucin matice a vektoru, tj. vektor T.u> = v> (tenzor 1.radu) jako tenzor tretıho radu zuzeny pres index j:
Tijuj = Wijj = vi .
V uvedenem smyslu je take nutno chapat a interpretovat definicnı relace pro tenzory v kapitole1.3.1.
Prıklady
(a) Zuzenım dyadickeho soucinu vektoru obdrzıme skalarnı soucin, nebot’
u · v = uivi = Tr (u⊗ v) .
(b) Kroneckeruv symbol δij je tenzorem 2. radu, ktery reprezentuje jednotkovou matici I. Protoje naprıklad
δijδik = δjk , δii = 3 .
1.3.3 Specialnı vlastnosti tenzoru
(a) Izotropnı tenzoryJejich slozky se pri ortogonalnı transformaci nemenı. Typickym prıkladem je Kroneckeruv tenzor(Kroneckerovo delta), nebot’
δ′ij = aikajlδkl = aikajk = δij .
Stejnou vlastnost ma take Levi-Civituv tenzor, o kterem pojednava kapitola 1.6.
PrıkladDokazeme, ze tenzor
ηijkl = A.δijδkl +B.δikδjl + C.δilδjk (1.21)
je pro libovolna cısla A, B, C izotropnım tenzorem 4. radu.Podle transformacnı definice tenzoru je
η′ijkl = airajsaktaluηrstu = airajsaktalu.(A.δrsδtu +B.δrtδsu + C.δruδts) =
= Aairδrs︸ ︷︷ ︸ais
ajsakt aluδtu︸ ︷︷ ︸alt
+B airδrt︸ ︷︷ ︸ait
ajsδsu︸ ︷︷ ︸aju
aktalu + C airδru︸ ︷︷ ︸air
ajsδts︸ ︷︷ ︸ajt
aktalu =
= A. aisajs︸ ︷︷ ︸δij
aktatl︸ ︷︷ ︸δkl
+B. aitakt︸ ︷︷ ︸δik
ajualu︸ ︷︷ ︸δjl
+C. aiualu︸ ︷︷ ︸δil
aktajt︸ ︷︷ ︸δjk
= ηijkl .
(b) Symetricke a antisymetricke tenzory
• Symetricky tenzor 2. radu: Tij = Tji.
• Antisymetricky tenzor 2. radu: Tij = −Tji.
• U tenzoru vyssıch radu se symetrie (antisymetrie) tyka pouze vybrane dvojice indexu;naprıklad tenzor 3. radu, pro ktery platı Wijk = −Wikj je antisymetricky v indexech j, k.

1.3. KARTEZSKE TENZORY 13
U tenzoru 2. radu je zrejma analogie se symetrickymi, resp. antisymetrickymi maticemi. Platı,ze kazdy takovy tenzor lze rozlozit na soucet symetrickeho a antisymetrickeho tenzoru 2. radu:
Tij =1
2(Tij + Tji) +
1
2(Tij − Tji) = Sij +Aij ,
kde Sij je symetricky tenzor (urcen sesti prvky) a Aij antisymetricky tenzor (urcen tremi prvky).
(c) Parita tenzoru Pro libovolnou fyzikalnı velicinu f(r), kde r = (x1, x2, x3) je polohovyvektor, definujeme jejı paritu na zaklade toho, jak se zmenı jejı znamenko pri zmene orientacepolohoveho vektoru. Je tedy
P(f)f(r) = f(−r) (1.22)
a tudız P(f) = ±1. Kuprıkladu pro rychlost v a sılu F platı
v =dr
dt, F = m
dv
dt= m
d2r
dt2,
a proto je v(−r) = −v(r), F (−r) = −F (r) a oba vektory majı zapornou paritu. Obecne pakpro libovolny rad M rozlisujeme dva typy tenzoru podle jejich parity P:
• vlastnı tenzory, pro nez P = (−1)M ,
• pseudotenzory, pro nez P = −(−1)M = (−1)M+1.
U vektoru (M = 1) je pouzıvano oznacenı polarnı vektor mısto vlastnı vektor a axialnı vektormısto pseudovektor.Platı obvykle multiplikativnı pravidlo,
P⊗Q = R → P(P)P(Q) = P(R) .
Proto je naprıklad vektorovy soucin axialnım vektorem, nebot’ P(u × v) = P(u)P(v) = 1 proP(u) = P(v) = −1. Je nezbytne, aby paritu zachovavaly vsechny tenzorove rovnice popisujıcırealne fyzikalnı jevy.
PrıkladLorentzova sıla F pusobıcı na castici o rychlosti v a nesoucı elektricky naboj q v magnetickempoli s magnetickou indukcı B je dana vztahem
F = qv ×B .
Protoze F a v jsou polarnı vektory se zapornou paritou, musı mıt B paritu +1; jedna se tedyo axialnı vektor.
Prıklad – specialnı operace s vektory v R3
Budeme pracovat se zakladnı ortonormalnı bazı
e1 = (1, 0, 0) , e2 = (0, 1, 0) , e3 = (0, 0, 1) .
Krome drıve zavedeneho dyadickeho a skalarnıho soucinu pripomeneme dalsı operace definovanepouze v tomto prostoru.(i) Vektorovy soucin:
u× v = (u2v3 − u3v2, u3v1 − u1v3, u1v2 − u2v1) =
∣∣∣∣∣∣∣e1 e2 e3
u1 u2 u3
v1 v2 v3
∣∣∣∣∣∣∣ .Geometricka interpretace:

14 KAPITOLA 1. KARTEZSKE TENZORY
• velikost ‖u× v‖ = ‖u‖.‖v‖. sinα, kde α je uhel vektoru,
• smer je kolmy k obema vektorum, u ⊥ u× v, v ⊥ u× v,
• orientace takova, ze u, v, u× v tvorı pravotocivou soustavu.
Rozlozıme-li dyadicky soucin vektoru Tij = uivj na symetricky a antisymetricky tenzor, lzesnadno ukazat, ze
Aij = (u× v)6−i−j , (1.23)
odpovıda-li poradı indexu i, j sude permutaci poradı 123. Vsimneme si dulezite skutecnosti, zevektorovy soucin je definovan pouze v prostoru dimenze 3. Duvod je nasledujıcı: pocet prvkuurcujıcıch antisymetricky tenzor 2. radu v Rn je (n2−n)/2. Ma-li byt roven poctu slozek vektoruv tomto prostoru, musı byt (n2 − n)/2 = n, coz nastava pouze pro n = 3.(ii) Smıseny soucin trı vektoru:
u · (v ×w) =
∣∣∣∣∣∣∣u1 u2 u3
v1 v2 v3
w1 w2 w3
∣∣∣∣∣∣∣ .1.4 Tenzory v aplikacıch
Nebude-li receno jinak, omezıme se vzhledem k obvyklym aplikacım v teto i dalsıch kapitolachna tenzory v prostorech dimenze 2 a 3.
1.4.1 Materialova anizotropie
Materialova anizotropie se z hlediska puvodu rozlisuje podle toho, zda se jedna o stav prirozenynebo umele vyvolany. S prirozenou anizotropiı se muzeme setkat u hornin a geologickych struk-tur obecne, u kompozitnıch materialu, krystalu atd. Jde zpravidla o jev trvaleho charakteru.Umela anizotropie je v materialech vyvolana nejakym vnejsım faktorem, naprıklad mechanickymnamahanım, elektrickym nebo magnetickym polem aj., a obvykle odeznı soucasne s externımcinitelem. Typickym prıkladem je piezoelektricky jev.
Prıklady tenzorovych materialovych velicin
(i) permitivita ε: D = εE, kde D je elektricka indukce a E intenzita elektrickeho pole;
(ii) koeficient difuze (difuznı tenzor) kd: vd = −kd · grad c, kde vd je rychlost difuze a c jekoncentrace;
(iii) hydraulicka propustnost (popr. koeficient filtrace) kf : vf = −kf ·grad p, kde vf je rychlostfiltrace podzemnı vody a p je hydraulicky tlak.
Uvedene vztahy, ve kterych se s tenzorovymi velicinami casto setkavame, patrı do siroke skupinytzv. konstitucnıch relacı. Mezi nimi predstavujı specifickou kategorii relace pouzıvane u rela-xacnıch modelu (prıklady (ii) a (iii)), ktere schematicky muzeme zapsat takto:
tokova velicina = materialovy parametr× gradient stavove veliciny,
neboliv = −p · gradu . (1.24)
Zaporne znamenko na prave strane je fyzikalnı konvence, ktera smeruje ke kladne (kladne ori-entovane) tokove funkci v pri obvykle zapornem gradientu stavove funkce u.

1.4. TENZORY V APLIKACICH 15
1.4.2 Tenzor napetı
Uvazujme objemovy element ∆V tuheho pruzneho telesa a povrchovou sılu T pusobıcı naplosnem elementu ∆S jeho povrchu. Na jednotku plochy o normalovem vektoru ν = (ν1, ν2, ν3)pak pusobı vektor napetı vektor napetı T (ν). Ten ma obecnou polohu v prostoru, a proto horozlozıme do trı plosek rovnobeznych se souradnymi rovinami, aby bylo mozne vzajemne po-rovnanı napet’ovych stavu v ruznych bodech s ruznymi normalami. Jako elementarnı objem Vzvolıme ctyrsten – obr. 1.2. Velikost trojuhelnıkove plosky kolme na osu xj , j = 1, 2, 3, oznacıme∆Sj . Prıslusny normalovy vektor bude tedy opacny k bazovemu vektoru prıslusnemu dane ose,tj. ν(j) = −ej . Vektory napetı na techto ploskach oznacıme T (j). Neuvazujeme-li objemove sıly
T(ν)
T(2)
T(1)
T(3)
ν
ν(1)
ν(3)
ν(2)
x1
x3
x2
hP
Obrazek 1.2: Elementarnı ctyrsten – k odvozenı tenzoru napetı.
(tıhovou, setrvacnou apod.), musı byt vyslednice vsech plosnych sil nulova, aby byl ctyrsten vrovnovaze:
T (1)∆S1 + T (2)∆S2 + T (3)∆S3 + T (ν)∆S = o . (1.25)
Dale je zrejme, ze uhel normal ν(j) = −ej a ν je roven uhlu, ktery svırajı elementy ∆Sj a ∆S.Platı tedy, ze
∆Sj = cos( ν(j),ν)∆S = −νj∆S .
Upravıme-li takto bilancnı vztah (1.25), dostavame po vydelenı vyrazem ∆S rovnost
T (ν) = T (1)ν1 + T (2)ν2 + T (3)ν3 . (1.26)
Tento vysledek znamena, ze vektor napetı v bode plochy s normalou ν muzeme jednoznacneurcit, zname-li napetı ve trech navzajem kolmych smerech. Pro kazdy z nich to predstavuje trislozky vektoru T (j), ktere oznacıme takto:
T (j) = (τj1, τj2, τj3) .
Podle (1.26) tedy bude naprıklad pro prvnı slozku vektoru T (ν) platit
T(ν)1 = T
(1)1 ν1 + T
(2)1 ν2 + T
(3)1 ν3 = τ11ν1 + τ21ν2 + τ31ν3 .
Vztah (1.26) muzeme jako celek zapsat tenzorove rovnicı
T(ν)i = τjiνj , (1.27)

16 KAPITOLA 1. KARTEZSKE TENZORY
kde
τ =
τ11 τ12 τ13
τ21 τ22 τ23
τ31 τ32 τ33
(1.28)
je tenzor napetı (tenzorovy charakter teto veliciny overte jako cvicenı). Diagonalnı slozky τjj , j =1, 2, 3 nazyvame normalova napetı, mimodiagonalnı slozky τji, j 6= i, jsou tzv. smykova napetı.Casto pouzıvany je vztah pro normalove napetı:
N = T · ν = Tjνj = τjj = τ11 + τ22 + τ33 = Tr(τ ) (1.29)
(stopa matice τ , tj. soucet prvku na hlavnı diagonale). Jedna se o invariant tenzoru napetı (vizkap. 1.5), jehoz interpretacı je tah pro N > 0, resp. tlak pro N < 0.
1.4.3 Piezoeektricky jev
Schopnost konkretnıho materialu reagovat na vnejsı mechanicke namahanı je charakterizovanatzv. piezoelektrickym modulem d, coz je tenzor 3. radu. Je-li τ tenzor napetı, je piezoelektrickyefekt vyjadren dipolovym momentem P takto:
Pi = dijkτjk . (1.30)
Ze sedmadvaceti slozek tenzoru d je naprıklad pro trojosy krystal pouze 18 ruznych v dusledkusymetrie tenzoru napetı. Pro dalsı krystalove soustavy s vyssı symetriı pocet urcujıcıch slozekdale klesa.
1.5 Tenzory 2. radu
Jak je zrejme z predchozıho prehledu, jsou v obvyklych aplikacıch zastoupeny prevazne tenzory2. radu. Uvedeme pro ne nektere doplnujıcı vlastnosti, ktere casto souvisı s poznatky z algebrymatic.
1.5.1 Hlavnı smery a invarianty tenzoru 2. radu
Zamerıme se nynı na symetricke tenzory 2. radu, ktere majı cetne aplikace naprıklad v mechanice.Oznacme libovolny z nich
S =
S11 S12 S13
S12 S22 S23
S13 S23 S33
,takze Sij = Sji. Lze ho chapat jako matici kvadraticke formy v promennych x1, x2, x3 tvorıcıch(sloupcovy) vektor x. Formu lze zapsat zpusobem obvyklym v algebre,
xSx> = S11x21 + S22x
22 + S33x
23 + 2S12x1x2 + 2S13x1x3 + 2S23x2x3 ,
nebo tenzorove (s vyuzitım sumacnı konvence) jako Sijxixj . Tento tenzor 4. radu je zuzen v obouindexech, jedna se tedy o skalar. Polozıme-li ho roven nejake konstante (kladne nebo zaporne),obdrzıme rovnici kvadraticke plochy v R3. Nazyvame ji kvadrikou pridruzenou k tenzoru Sij :
Sijxixj = ±K2 .
Chceme-li urcit, o jaky typ kvadriky se jedna, lze to provest na zaklade vlastnıch cısel (spektra)matice S. Vlastnım cıslum odpovıdajı vlastnı vektory, ktere urcujı smery hlavnıch os kvadriky.Pripomenme nynı, jak se formuluje a resı uloha na vlastnı cısla a vlastnı vektory matice.

1.5. TENZORY 2. RADU 17
Kazdy hlavnı smer u je resenım rovnice
Su> = λu> , tenzorove Sijuj = λui ,
kde λ je v prıpade symetrickeho tenzoru realne cıslo. Po prepsanı do tvaru
(S− λI)u> = o> , tenzorove (Sij − λδij)uj = 0 ,
vidıme, ze pro zıskanı netrivialnıho resenı u 6= o musı byt determinant matice soustavy rovennule:
| Sij − λδij |= 0 ,
tj. ∣∣∣∣∣∣∣S11 − λ S12 S13
S12 S22 − λ S23
S13 S23 S33 − λ
∣∣∣∣∣∣∣ = 0 .
Po rozepsanı obdrzıme rovnici tretıho stupne
λ3 − I1λ2 + I2λ− I3 = 0 , (1.31)
jejımz resenım jsou vlastnı cısla λ1, λ2, λ3. Jejich struktura charakterizuje typ kvadraticke plo-chy, naprıklad
• navzajem ruzne λ1, λ2, λ3 > 0 odpovıdajı trojose (nerotacnı) elipticke plose,
• λ1 = λ2 = λ3 6= 0 znamena kulovou plochu,
• λ1 = λ2 > 0, λ3 < 0 urcuje hyperbolickou plochu s osou rotace x3 atd.
Nasobnost korenu je tedy znamkou symetrie kvadriky. Dulezitou vlastnostı spektra vlastnıch cıselmatice je to, ze se nemenı pri ortogonalnı transformaci, tj. jsou nezavisle na volbe souradnehosystemu. Proto je pro konkretnı tenzor invariantnı charakteristicka rovnice (1.31) a tedy i jejıkoeficienty. Nazyvame je invarianty tenzoru 2. radu a majı, jak je znamo z algebry, tento tvar:
I1 = S11 + S22 + S33 = Sii, I2 =
∣∣∣∣∣ S11 S12
S12 S22
∣∣∣∣∣+∣∣∣∣∣ S11 S13
S13 S33
∣∣∣∣∣+∣∣∣∣∣ S22 S23
S23 S33
∣∣∣∣∣ ,I3 = |S| (determinant matice S) .
PrıkladUrcıme hlavnı smery a typ pridruzene kvadriky tenzoru
S =
6 −2 2−2 5 0
2 0 7
.1. vlastnı cısla:Charakteristicka rovnice
|S− λI| =
∣∣∣∣∣∣∣6− λ −2 2−2 5− λ 02 0 7− λ
∣∣∣∣∣∣∣ = · · · = −λ3 + 18λ2 − 99λ+ 162 = 0

18 KAPITOLA 1. KARTEZSKE TENZORY
ma koreny λ1 = 3, λ2 = 6, a λ3 = 9. Pridruzenou kvadrikou je nerotacnı elipticka plochav obecne poloze o rovnici
6x21 + 5x2
2 + 7x23 − 4x1x2 + 4x1x3 = K2 .
2. vlastnı vektory (hlavnı smery kvadriky = smery hlavnıch os elipticke plochy):Vlastnı cısla postupne dosazujeme do matice S− λI a resıme homogennı algebraickou soustavupro slozky jednotlivych vlastnıch vektoru.
λ1 = 3 . . .
3 −2 2−2 2 0
2 0 4
· u11
u12
u13
=
000
.Matice ma hodnost dve, resenım soustavy je libovolny nasobek vektoru u1 = (2, 2, −1). Analo-gicky zıskame zbyvajıcı dva vlastnı vektory:
λ2 = 6 . . . u2 = (−1, 2, 2) , λ3 = 9 . . . u3 = (2, −1, 2) .
1.6 Levi-Civituv tenzor
1.6.1 Zavedenı a zakladnı vlastnosti
Levi-Civituv tenzor je tenzor tretıho radu definovany vztahem
εijk =
1 pro sudou permutaci indexu,−1 pro lichou permutaci indexu,
0 pro i = j nebo j = k nebo k = i.(1.32)
Tento tenzor ma celkem 33 = 27 prvku, z nichz ovsem jen 6 je nenulovych (viz obr. 1.3). Ukazemejeho transformacnı vlastnost podle (1.20):
ε′ijk = ailajmaknεlmn = ai1.(aj2ak3 − aj3ak2) + ai2.(aj3ak1 − aj1ak3) + ai3.(aj1ak2 − aj2ak1) =
=
∣∣∣∣∣∣∣ai1 ai2 ai3aj1 aj2 aj3ak1 ak2 ak3
∣∣∣∣∣∣∣ =
1, ijk = 123, 231, 312,−1, ijk = 321, 213, 132,
0, v ostatnıch prıpadech= εijk.
Budou-li totiz vsechny tri indexy ruzne, dostavame determinant ortogonalnı matice A, kteryje roven ±1 v zavislosti na poradı radku. Jsou-li si nektere dva indexy rovny, budou se rovnatodpovıdajıcı radky matice a jejı determinant bude nulovy. Protoze je ε′ijk = εijk, je Levi-Civituvtenzor pri ortogonalnı transformaci invariantnı a tedy izotropnı. Dale je podle definice anti-symetricky vzhledem k libovolne dvojici indexu, protoze εijk = −εjik atd.
PrıkladDokazeme, ze pro vektorovy soucin platı
u× v = εijkeiujvk . (1.33)
Vyuzijeme definici Levi-Civitova tenzoru:
εijkeiujvk = e1(u2v3 − u3v2) + e2(−u1v3 + u3v1) + e3(u1v2 − u2v1) =
=
∣∣∣∣∣∣∣e1 e2 e3
u1 u2 u3
v1 v2 v3
∣∣∣∣∣∣∣ = u× v .

1.6. LEVI-CIVITUV TENZOR 19
00
0
00
00
−1 1
0
0
0
0
0
0
0
0
1
1 −1
−1
000
00
0 k = 1
k = 2
k = 3
j = 1, 2, 3i = 1, 2, 3
Obrazek 1.3: Levi-Civituv tenzor.
1.6.2 Cvicenı
(1) Vyjadrete pomocı Levi-Civitova tenzoru smıseny soucin vektoru.
(2) Urcete hlavnı smery a typ pridruzene kvadriky tenzoru
T =
4 0 10 4 21 2 0
.(3) Dokazte platnost identity εijkεklm = δjmδil − δjlδim.
(4) S pouzitım predchozıho vztahu overte platnost vzorce pro dvojny vektorovy soucin:
a× (b× c) = (a · c)b− (a · b)c . (1.34)
(5) Ukazte, ze Levi-Civituv tenzor prirazuje vektoru antisymetricky tenzor 2. radu, tj.
εijkuk = Uij , Uij = −Uji . (1.35)
Pouzijte tento vysledek k maticovemu zapisu vektoroveho soucinu.
(6) Tenzor napetı je zadan ve tvaru
τ =
4 0 2√
20 1 0
2√
2 0 2
.Urcete hlavnı smery a hlavnı napetı. Stanovte typ pridruzene kvadriky napetı a napistejejı rovnici, prochazı-li bodem [
√2,−1, 1].
(7) Bod Q = [1,−1, 4] lezı na plose z = 2− x2− 3xy. Tenzor napetı v tomto bode je zadan vetvaru
τ =
2 1 11 1 01 0 1
.Urcete hlavnı smery a hlavnı napetı, stanovte typ pridruzene kvadriky napetı a napistejejı rovnici, prochazı-li bodem zadanym bodem. Vypoctete vektor napetı v tomto bode.

20 KAPITOLA 1. KARTEZSKE TENZORY
(8) Rozlozte dyadicky soucin vektoru Tij = uivj na kulovy tenzor a deviator pro konkretnıvektory u = (2, 4, 4), v = (1, 3, 1).
Kapitola 2
Zaklady tenzorove analyzy
Zakladnı temata vektorove analyzy jsou doplnena o aplikace tenzoroveho poctu. Problematikaje diskutovana prevazne v prostoru dimenze 3, kde je mozno ukazat geometrickou interpretacia demonstrovat dulezite poznatky na aplikacıch.
2.1 Uvodnı pojmy
2.1.1 Skalarnı funkce
Zakladnı oznacenıΩ ⊂ Rn, n = 2, 3 . . . oblast,∂Ω = Γ . . . jejı hranice,Ω = Ω ∪ Γ . . . uzavrena oblast (uzaver oblasti Ω),X = [x1, x2, x3] ∈ Ω . . . bod oblasti,x = (x1, x2, x3) . . . jeho polohovy vektor.
Zobrazenı f(X) : Ω → R predstavuje skalarnı funkci definovanou na oblasti Ω predpisemf(x1, x2) v rovine, resp. f(x1, x2, x3) v prostoru.V prvnım prıpade je jejım grafem plocha v R3, ve druhem prıma graficka interpretace nenık dispozici. Lze vsak zavest tzv. ekviskalarnı hladiny
f(x1, x2, x3) = C
jako plochy, na nichz funkce dosahuje stejnych hodnot (pro funkci dvou promennych jsou ekvis-kalarnımi hladinami krivky na plose). Podle typu pole nesou hladiny svuj nazev, naprıkladizotermy, izobary, ekvipotencialy, vrstevnice apod.
Dulezite trıdy funkcı:
Ck(Ω) . . . prostory funkcı se spojitymi derivacemi na oblasti Ω az do radu k vcetne,
Lp(Ω) . . . prostory funkcı absolutne integrovatelnych v p–te mocnine na Ω, tj. funkcı, pro nezkonverguje integral ∫
Ω|f(X)|pdΩ .
Je-li plocha S grafem funkce f(x1, x2) ∈ C1(Ω), tj. se spojitymi parcialnımi derivacemi (alespon)prvnıho radu, existuje v kazdem jejım bode normalovy vektor
n(X) =
(− ∂f
∂x1, − ∂f
∂x2, 1
). (2.1)
21

22 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
Orientovane prırustky funkce f ve smeru jednotlivych os lze aproximovat tecnymi vektory
τ 1dx1 =
(1, 0,
∂f
∂x1
)dx1, τ 2dx2 =
(0, 1,
∂f
∂x2
)dx2 .
Jejich vektorovy soucin tvorı orientovany element plochy (presneji jejı tecne roviny):
dS = τ 1dx1 × τ 2dx2 = n(x1, x2)dx1dx2, (2.2)
kde
n(x1, x2) = τ 1 × τ 2 =
(− ∂f
∂x1, − ∂f
∂x2, 1
)je vyse uvedeny normalovy vektor. Velikost elementu je pak
dS =‖n‖ dx1dx2 =
√(∂f
∂x1
)2
+
(∂f
∂x2
)2
+ 1 dx1dx2 . (2.3)
Plocha s uvedenymi vlastnostmi se nazyva hladka.
Prıklady
1. Skalarnı funkce dvou promennych f(X) = 3x13
√x4
2 je trıdy C1(Ω) na libovolne oblasti Ω
neobsahujıcı bod(-y) osy x1, nebot’
∂f
∂x1= 2 3
√x4
2,∂f
∂x2= 4x1
3√x2,
∂2f
∂x21
= 0,∂2f
∂x1∂x2= 4 3√x2,
∂2f
∂x22
=4x1
3 3√x2
,
kde poslednı z parcialnıch derivacı 2. radu nenı pro x2 = 0 spojita.
2. Uvazujme na jednotkovem kruhu Ω = ‖x‖≤ 1 funkci
g(x) =1√
x21 + x2
2
.
Integracı s pouzitım transformace do polarnıch souradnic dostavame∫Ω|g(X)| dΩ =
2π∫0
dϕ
1∫0
dρ = 2π,
∫Ω|g(X)|2dΩ =
2π∫0
dϕ
1∫0
1
ρdρ =∞ .
Proto platı: g(X) ∈ L1(Ω), ale g(X) /∈ L2(Ω).
3. Elektrostaticky potencial bodoveho naboje Q umısteneho v pocatku souradneho systemuje pro bod X ∈ R3 dan vztahem
V (X) =Q
4πε
1
‖ x ‖,
kde ε je permitivita prostredı. Ekvipotencialnı hladiny V (X) = C jsou soustredne kuloveplochy o rovnicıch
‖x‖= Q
4πεC, tj. x2
1 + x22 + x2
3 =
(Q
4πεC
)2
.
4. Tlakove pole je na oblasti Ω = (−1, 3)× (−1, 2) popsano funkcı p(X) = x1x2−x1. Grafemje sedlova plocha, izobarami jsou rovnoose hyperboly o rovnicıch
p(X) = C neboli x2 = 1 +C
x1.
Prumet nekterych izobar do roviny p = 0 je na obr. 2.1.

2.1. UVODNI POJMY 23
−3
−2.5
−2−1
.5
−1.5
−1.5
−1
−1
−1
−0.5
−0.5
−0.5
−0.5
00
00
0
0 0
0.5
0.5
0.5
0.51
1
1
1.5
1.5
1.5
2
2
2.5
3
3.5
Obrazek 2.1: Izobary funkce p = x1x2 − x1.
2.1.2 Vektorove funkce jedne promenne
Tyto funkce predstavujı dulezitou skupinu definovanou predpisem
ϕ : 〈t1, t2〉 → R3, ϕ(t) = (x1(t), x2(t), x3(t)) . (2.4)
Koncove body vektoru ϕ(t) tvorı jistou krivku K v prostoru definovanou na intervalu 〈t1, t2〉.Je-li ‖ϕ(t)‖6= 0 a soucasne xi(t) ∈ C1 (〈t1, t2〉), nazyva se K hladkou krivkou. Je zrejme, ze k nıpro kazde t existuje tecna odpovıdajıcı tecnemu vektoru
ϕ(t) = (x1(t), x2(t), x3(t))
(teckou na prıslusnym symbolem znacıme derivaci podle parametru t). Po castech hladka krivkaje sjednocenım konecneho poctu hladkych krivek majıcıch spolecne pouze krajnı body. Relacemi(2.4) je dana konkretnı parametrizace krivky K. Kazda krivka ma nekonecne mnoho parame-trizacı. Dale budeme predpokladat, ze ϕ(t) je proste zobrazenı, tj. jedna se o regularnı krivku(v zadnem bode sama sebe neprotına).
Orientace krivky se stanovuje zadanım pocatecnıho a koncoveho bodu, nenı-li uzavrena.Krivka je uzavrena, jestlize ϕ(t1) = ϕ(t2). Orientace rovinne uzavrene krivky proti smeru ho-dinovych rucicek je definovana jako kladna. V prostoru je treba kladnou orientaci krivky zadatvzhledem k zvolenemu smeru podle pravidla prave ruky.
Prıklady
1. Mejme v rovine parabolu x2 = 2x1 − x21 orientovanou od bodu [0,0] k bodu [2,0]. Jejı
bezprostrednı parametrizaci obdrzıme, polozıme-li x1 = t:
ϕ(t) = (t, 2t− t2), t ∈ 〈0, 2〉.
Jina z moznych parametrizacı vznikne, polozıme-li x1 = 1 + cos s:
ψ(s) = (1 + cos s, sin2 s), s ∈ 〈0, π〉.
Snadno se lze presvedcit, ze prvnı z parametrizacı je souhlasna se zadanou orientacı krivky,zatımco ve druhem prıpade se s rostoucım parametrem s pohybujeme po krivce opacnymsmerem (nesouhlasna parametrizace).

24 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
2. Je dana krivka K = x21 + x2
2 = 4, x1 + x3 = 2 orientovana souhlasne s kladnym smeremosy x3. Ukolem je najıt vhodnou parametrizaci souhlasnou s orientacı.
Jedna se o elipticky rez rovinou na rotacnı valcove plose – obr. 2.2. Nejprve vyuzijemezrejmou parametrizaci rıdıcı kruznice valcove plochy o polomeru 2:
x1 = 2 cos t, x2 = 2 sin t .
Z rovnice roviny snadno dovodıme zbyvajıcı vztah x3 = 2 − x1 = 2 − 2 cos t a zapısemevyslednou parametrizaci elipsy:
ϕ(t) = (2 cos t, 2 sin t, 2− 2 cos t), t ∈ 〈0, 2π〉.
Obrazek 2.2: K parametrizaci elipsy v prostoru.
Abychom se presvedcili, ze zıskana parametrizace je souhlasna se zadanou orientacı (vizsipku na obr. 2.2), dosadıme do funkce ϕ(t) postupne tri rostoucı hodnoty parametru t,naprıklad 0, π/2 a π. Vidıme, ze jim odpovıdajıcı body [2,0,0], [0,2,2] a [-2,0,4] na krivceza sebou nasledujı ve smeru zvolene orientace.
2.1.3 Vektorove funkce
Zobrazenı F (X) : Ω→ R3 predstavuje vektorovou funkci F = (F1, F2, F3) o slozkach Fi(x1, x2, x3).Za vhodnych predpokladu reprezentujı vektorove pole F tzv. vektorove linie definovane tak, zev libovolnem bode X definicnıho oboru ma vektor F (X) smer tecny k temto liniım. To znamena,ze je kolinearnı (rovnobezny) s vektorem dx = (dx1, dx2, dx3), platı tedy
F × dx = o ⇒ (F2dx3 − F3dx2, F3dx1 − F1dx3, F1dx2 − F2dx1) = (0, 0, 0) . (2.5)
Tento vysledek obvykle zapisujeme jako soustavu trı diferencialnıch rovnic
dx1
F1=dx2
F2=dx3
F3, (2.6)
z nichz stacı vyresit kteroukoli vybranou dvojici. Vysledkem jsou dva systemy ploch v prostoru,
Φ((x1, x2, x3) = C1, Ψ((x1, x2, x3) = C2 ,

2.1. UVODNI POJMY 25
ktere se protınajı prave v hledanych krivkach. Prıpadna parametrizace je finalnım krokem.Vektorove linie casto nesou nazvy souvisejıcı s typem vektoroveho pole ktere reprezentujı.
Mluvıme pak o trajektoriıch ci proudnicıch u pole rychlostı, o silocarach ci magnetickych in-dukcnıch carach.
Prıklady
1. Je dano rovinne silove pole F = (x1 cosx2, sinx2). Odvod’te rovnice jeho silocar.
Jedna se o jednodussı variantu predchozıho vysledku – vystacıme s jedinou diferencialnırovnicı
dx1
x1 cosx2=
dx2
sinx2,
kterou lze snadno separovat a dojıt k obecnemu resenı
x2 = arcsin(Cx1) .
2. Rychlostnı pole v prostoru je popsano funkcı
v = (x1x2x3, −x21x3, x
21x2), x1 ≥ 0, x2 ≥ 0, x3 ≥ 0.
Ukolem je urcit vektorovou linii (trajektorii) jdoucı bodem M = [1, 0, 1].
Vychozı soustava rovnic (2.6):
dx1
x1x2x3= − dx2
x21x3
=dx3
x21x2
.
Prvnı dvojice dava vysledek
x1dx1 = −x2dx2 ⇒ x21 + x2
2 = C1 ,
druha−x2dx2 = x3dx3 ⇒ x2
2 + x23 = C2 .
Jedna se o dva navzajem kolme systemy koaxialnıch valcovych ploch. Dosazenım souradnicbodu M obdrzıme C1 = C2 = 1, tedy prunik dvou kolmych rotacnıch valcovych plocho stejnem polomeru.
Obrazek 2.3: K prıkladu 2.
Hledanou krivkou je elipsa (resp. jejı ctvrtina v prvnım oktantu) na obr. 2.3 s parametrizacı
ϕ(t) = (cos t, sin t, cos t), t ∈ 〈0, π/2〉.

26 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
2.1.4 Tenzorove funkce
Obecna tenzorova funkce T(X) prirazuje kazdemu bodu X ∈ Ω tenzor M -teho radu s prvkyTi1i2···iM (X). Tenzorova funkce libovolneho radu s konkretnı interpretacı (teplota, rychlost, de-formace, permitivita apod.) se nazyva tenzorove pole.
Specialne tenzorova funkce 2. radu je zobrazenı T(X) : Ω→ Rn⊗Rn, Tij = Tij(x1, . . . , xn).Pro n = 3 ma podobu trojrade matice, jejız kazdy prvek je funkcı prostorovych souradnic:
T(X) =
T11(X) T12(X) T13(X)T21(X) T22(X) T23(X)T31(X) T32(X) T33(X)
.
2.2 Derivace tenzorove funkce
2.2.1 Derivace a diferencial tenzorove funkce
Je-li kazda slozka tenzorove funkce T(x) diferencovatelna na oblasti Ω, pak tenzor ∂T/∂x, x =(x1, . . . , xn) se slozkami
∂Ti1i2···iM∂xj
= lim∆xj→0
Ti1i2···iM (x1, . . . , xj + ∆xj , . . . , xn)− Ti1i2···iM (x1, . . . , xj , . . . , xn)
∆xj
nazyvame totalnı derivacı funkce T(x) vzhledem k x.Diferencial tenzorove funkce T(x) v bode x ∈ Ω je definovan jako linearnı funkce vektoruprırustku dx = (dx1, dx2, . . . , dxn) vztahem
dT(x) =∂T
∂xdx .
Totalnı derivace je tenzor radu M +1, diferencial je radu M stejne jako T. Konkretne naprıkladtotalnı derivacı tenzoru 2. radu v R3 obdrzıme tenzor 3. radu s dvaceti sedmi slozkami:
∂T
∂x= W , kde Wijk =
∂Tij∂xk
.
Diferencial vektorove funkce T(x) = (T1, T2, T3) zıskame jako soucin matice
∂T
∂x=∂Ti∂xj
=
∂T1∂x1
∂T1∂x2
∂T1∂x3
∂T2∂x1
∂T2∂x2
∂T2∂x3
∂T3∂x1
∂T3∂x2
∂T3∂x3
(2.7)
a vektoru (dx1, dx2, dx3)>:
dT(x) =∂Ti∂xj
dxj =
∂T1∂x1
dx1 + ∂T1∂x2
dx2 + ∂T1∂x3
dx3
∂T2∂x1
dx1 + ∂T2∂x2
dx2 + ∂T2∂x3
dx3
∂T3∂x1
dx1 + ∂T3∂x2
dx2 + ∂T3∂x3
dx3
=
dT1
dT2
dT3
.
V radcıch jsou skalarnı difrencialy jednotlivych slozek vektorove funkce.

2.2. DERIVACE TENZOROVE FUNKCE 27
2.2.2 Diferencialnı operatory
Diferencialnı pocet s tenzorovymi funkcemi se v aplikacıch uplatnuje zpravidla prostrednictvımdiferencialnıch operatoru aplikovanych na skalarnı funkce a tenzory prvnıho a druheho radu.Tyto operace byvajı velmi casto zapisovany pomocı diferencialnıho operatoru 1. radu
∇ =
(∂
∂x1,∂
∂x2, . . . ,
∂
∂xn
)nazyvaneho Hamiltonuv operator (nabla).
Je-li T (x) skalar, pak jeho totalnı derivacı je vektorova funkce zvana gradient
∂T
∂xi=
(∂T
∂x1,∂T
∂x2, . . . ,
∂T
∂xn
)= gradT = ∇T . (2.8)
K zavedenı dalsıch operatoru muzeme vyuzıt rozklad totalnı derivace vektorove funkce (2.7)podle schematu (??):
∂Ti∂xj
=1
3
∂Ti∂xi
+Aij + Pij , Pij = Sij −1
3
∂Ti∂xj
δij . (2.9)
Prvnı (izotropnı) clen je zuzeny tenzor 2. radu, tedy skalar, v nemz
∂Ti∂xi
=∂T1
∂x1+∂T2
∂x2+ . . .+
∂Tn∂xn
= div T = ∇ ·T = Tr
(∂T
∂x
). (2.10)
Jedna se o operator zvany divergence vektorove funkce T (x).Uplatnıme-li na antisymetrickou cast Aij vlastnost (1.23), kde ui = ∂/∂xi a vj = Tj , dostavamevektor
rot T = ∇×T =
(∂T3
∂x2− ∂T2
∂x3,∂T1
∂x3− ∂T3
∂x1,∂T2
∂x1− ∂T1
∂x2
)= εijk
∂Tk∂xj
ei . (2.11)
Vysledkem je rotace vektorove funkce T(x) = (T1, T2, T3), pro kterou s vyuzitım definice vek-toroveho soucinu muzeme pouzıt i vyjadrenı
rot T =
∣∣∣∣∣∣∣∣∣∣∣
e1 e2 e3
∂∂x1
∂∂x2
∂∂x3
T1 T2 T3
∣∣∣∣∣∣∣∣∣∣∣.
Pro uplnost je na mıste uvest ze pro totalnı derivaci vektorove funkce lze take pouzıt zapispomocı nabla-operatoru:
∂T
∂x= T⊗∇.
2.2.3 Slozene operatory
Formalne lze v R3 ze trı operatoru prvnıho radu slozit 9 operatoru druheho radu:grad grad div grad rot gradgrad div div div rot divgrad rot div rot rot rot
Operatory vytistene kurzıvou nelze realizovat, protoze gradient lze aplikovat pouze na skalarnıfunkci, zatımco divergenci a rotaci vyhradne na vektor. Pro slozene operatory vytistene tucneplatı:

28 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
• div grad = ∇ · ∇ = ∇2 = ∆ ( Laplaceuv operator),
∆ =∂2
∂x21
+∂2
∂x22
+∂2
∂x23
;
• rot rotT = grad divT −∆T , ∆T = (∆T1,∆T2,∆T3)(dukaz jako uloha k procvicenı).
Zbyvajıcı operatory davajı pri aplikaci nulovy vysledek:
• rot gradT = ∇ × ∇T = o podle definice vektoroveho soucinu; v tenzorovem vyjadrenıobdrzıme pro i-tou slozku:
(rot gradT )i = εijk∂
∂xj
(∂T
∂xk
)= εijk
∂2T
∂xj∂xk= 0 ,
protoze pro kazde pevne zvolene i zıskame dve smısene derivace 2. radu lisıcı se pouzeznamenkem.Dusledek: je-li rotF = o na oblasti Ω, pak je funkce F na teto oblasti gradientem nejakeskalarnı funkce T : F = gradT .
• div rotT = ∇ · (∇× T ) = 0,nebot’ v tomto smısenem soucinu jsou dva vektory stejne. V tenzorovem zapisu dostavame
div rotT =∂
∂xi
(εijk
∂Tk∂xj
)= εijk
∂2Tk∂xi∂xj
= 0
(pro kazde k jde o dve smısene parcialnı derivace opacneho znamenka).Dusledek: je-li divF = 0 na oblasti Ω, pak je mozno funkci F na teto oblasti reprezentovatrotacı jiste vektorove funkce T : F = rotT .
Prıklady
(a) Vypocteme divergenci soucinu skalarnı funkci ϕ s vektorovou funkcı T :
div (ϕT ) =∂ϕ
∂xiTi + ϕ
∂Ti∂xi
= T · gradϕ+ ϕdivT = ∇ϕ · T + ϕdiv T .
(b) Oznacıme-li r = (x1, x2, x3) polohovy vektor bodu a nasledne r = ‖r‖. Vypocteme grad (1/r).Protoze
∂
∂xi
(1
r
)=
∂
∂xi
1√x2
1 + x22 + x2
3
= − xi√(x2
1 + x22 + x2
3)3= −xi
r3,
dostavame
grad
(1
r
)= −
(x1
r3,x2
r3,x3
r3
)= −(x1, x2, x3)
r3= − r
r3.
CvicenıVe cvicenıch (1) a (2) je namısto (x1, x2, x3) pouzito (x, y, z).
(1) Je dana skalarnı funkce T = 3x2y − xyz − xz2. Urcete gradT a ∆T .
(2) Vypoctete rotG pro funkci G = (x2 − z2, yz, x2 + y2).

2.2. DERIVACE TENZOROVE FUNKCE 29
(3) Urcete div (r3).
(4) Urcete totalnı derivaci G⊗∇ pro funkci G z prıkladu (2).
(5) Dokazte: rot (ϕT ) = ϕ rotT + gradϕ× T .
(6) Odvod’te tvar Laplaceova operatoru pro funkci Φ(r), kde r = (x1, x2, x3).
(7) S pouzitım reseneho prıkladu (b) dokazte, ze funkce u(r) = 1/r, r 6= 0 vyhovuje Laplaceovediferencialnı rovnici.
2.2.4 Tenzor deformace
Deformace jsou elasticke (pruzne) zmeny stavu telesa, pri nichz dochazı soucasne ke zmenevzdalenosti libovolne blızkych bodu i ke zmenam polohy elementu v dusledku rotace nebo po-sunutı. Popıseme deformacnı zmenu elementu PQ, jejımz vysledkem je element P’Q’ (obr.2.4).
P
Q
P’
O
Q’u
y
dy
dx
u+du
x
Obrazek 2.4: Deformace elementu PQ.
Dalsı oznacenı:
• x, y . . . polohove vektory vzhledem k pocatku souradneho systemu O,
• u . . . vektor posunutı pro bod P,
• u+ du . . . vektor posunutı pro blızky bod Q,
• y = x+ u, y + dy = x+ dx+ u+ du.
Z poslednıch dvou vztahu plyne
dy = dx+ du , tj. slozkove dyi = dxi + dui . (2.12)
Zmenu polohoveho vektoru du aproximujeme diferencialem prvnıho radu,
dui =∂ui∂x1
dx1 +∂ui∂x2
dx2 +∂ui∂x3
dx3 =∂ui∂xj
dxj , (2.13)
a tento vztah dosadıme do (2.12):
dyi = dxi +∂ui∂xj
dxj =
(δij +
∂ui∂xj
)dxj . (2.14)

30 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
Porovname velikost elementu pred deformacı a po deformaci, tj. vyjadrıme rozdıl ‖dy‖2−‖dx‖2.Velikost elementu pred deformacı je
‖dx‖2 = dxkdxk = δjkdxjdxk , (2.15)
po deformaci podle (2.14)
‖dy‖2 = dyidyi =
(δij +
∂ui∂xj
)dxj .
(δik +
∂ui∂xk
)dxk .
Po zanedbanı kvadratickeho clenu a uprave je
‖dy‖2 =
(δjk +
∂uj∂xk
+∂uk∂xj
)dxjdxk . (2.16)
Vyjadrıme-li hledany rozdıl, bude
‖dy‖2 − ‖dx‖2 =
(∂uj∂xk
+∂uk∂xj
)dxjdxk . (2.17)
Tento vysledek slouzı k zavedenı tenzoru malych deformacı, jehoz charakter lze overit nazaklade transformacnıch rovnic; je symetricky, tzn. ze je urcen sesti slozkami:
e = (ejk) =1
2
(∂uj∂xk
+∂uk∂xj
)=
∂u1∂x1
12
(∂u1∂x2
+ ∂u2∂x1
)12
(∂u1∂x3
+ ∂u3∂x1
)∂u2∂x2
12
(∂u2∂x3
+ ∂u3∂x2
)symetricky ∂u3
∂x3
. (2.18)
Vyznam slozek tenzoru malych deformacıDiagonalnı slozky zjevne odpovıdajı relativnım prodlouzenım (zkracenım) ve smeru souradnychos, nebot’ (nescıta se!)
ejj =∂uj∂xj≈ ∆uj
∆xj. (2.19)
Mimodiagonalnı slozky jsou priblizne rovny jedne polovine smykovych uhlu, ktere vyjadrujı,o kolik se lisı uhel dvou elementu po deformaci od praveho uhlu, ktery svıraly pred deformacı :
ejk ≈1
2αj,k pro |αj,k| << 1 . (2.20)
Vsimneme si, ze totalnı derivace vektoru posuvu je tenzor druheho radu
∂u
∂x=∂uj∂xk
=
∂u1∂x1
∂u1∂x2
∂u1∂x3
∂u2∂x1
∂u2∂x2
∂u2∂x3
∂u3∂x1
∂u3∂x2
∂u3∂x3
,
ktery muzeme rozlozit na symetricky a antisymetricky tenzor:
∂uj∂xk
=1
2
(∂uj∂xk
+∂uk∂xj
)+
1
2
(∂uj∂xk− ∂uk∂xj
)= ejk + ωjk . (2.21)

2.3. KRIVKOVE A PLOSNE INTEGRALY 31
Tento vysledek znamena, ze uplna zmena polohy dvou bodu prideformaci je popsana krometenzoru malych deformacı ejk take deviatorem ωjk, ktery vyjadruje zmenu prostorove orientaceelementu.
PrıkladDokazeme invariantnost relativnı zmeny objemu
δV =∆V
V=V ′ − VV
pri malych deformacıch.
V = a.b.c je objem kvadru o hranach a, b, c pred deformacı,
V ′ = (a+ ∆a).(b+ ∆b).(c+ ∆c) je objem po deformaci, ktery dale upravıme podle (2.19):
V ′ = abc
(1 +
∆a
a
)(1 +
∆b
b
)(1 +
∆c
c
)= abc(1 + e11)(1 + e22)(1 + e33)
Jestlize provedeme roznasobenı a zanedbame cleny druheho a vyssıho stupne, muzeme psat
V ′ ≈ V (1 + e11 + e22 + e33) = V (1 + eii) .
Proto
δV =V ′ − VV
= eii ,
coz je invariant tenzoru 2. radu.
2.3 Krivkove a plosne integraly
2.3.1 Krivkove integraly
V zajmu lepsı prehlednosti prejdeme od indexovanych promennych x1, x2, x3 k symbolumx, y, z; napr. P = [x, y, z] pro bod v prostoru, r = (x, y, z) pro jeho polohovy vektor apod.Dale bude
• K (po castech) hladka krivka s parametrizacı ψ(t) = (x(t), y(t), z(t)), t ∈ 〈t1, t2〉 ,
• ψ(t) = (x(t), y(t), z(t)) ... tecny vektor krivky ve zvolene parametrizaci,
• d` = (dx, dy, dz) = ψ(t) dt ... orientovany element krivky,
• d` =√
(dx)2 + (dy)2 + (dz)2 =√x2 + y2 + z2 dt = ‖ψ(t)‖ dt ... jeho velikost,
• h(x, y, z) ... hustota veliciny na krivce K,
• F = (F1(x, y, z), F2(x, y, z), F3(x, y, z)) ... vektorove pole na krivce a v jejım okolı.
Krivkovy integral I. druhu vyjadruje mnozstvı veliciny na krivce:
H =
∫K
h(x, y, z) d` . (2.22)

32 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
Vypocet se deje prevodem na urcity integral vzhledem k parametrizaci:
∫K
h(x, y, z) d` =
t2∫t1
h(x(t), y(t), z(t)) ‖ψ(t)‖ dt . (2.23)
Ve specialnım prıpade h ≡ 1 na K vyjadruje integral I. druhu delku krivky:∫K
d` = L . (2.24)
PrıkladElektricky vodic ve tvaru ctvrtiny zavitu pravidlne sroubovice
ψ(t) = (3 cos t, 3 sin t, 2t), t ∈ 〈0, π/2〉
ma merny odpor ρ(x, y, z) = xy. Vypoctete celkovy odpor.
Vypocet:ψ(t) = (−3 sin t, 3 cos t, 2), ‖ψ(t)‖ =
√13 ,
R =
∫K
ρ(x, y, z) d` =
π/2∫0
9 cos t sin t√
13 dt = · · · = 9
2
√13 .
Krivkovy integral II. druhu:
P =
∫K
F (x, y, z) · d` =
∫K
F1dx+ F2dy + F3dz =
∫K
Fidxi , (2.25)
kde F ·d` je prumet vektoru pole do tecneho vektoru krivky. Poslednı vyraz je zapisem v puvodnıtenzorove symbolice vcetne sumacnı konvence. Tento integral oznacuje obecne posuv vektoru pokrivce, jeho konkretnı interpretace souvisı s typem pole F – viz dale.
Je treba si uvedomit, ze krivkovy integral II. druhu zavisı na orientaci krivky. Zvolena para-metrizace pak musı byt souhlasna se zadanou orientacı. Vypocet spocıva opet prevodu na urcityintegral:
∫K
F (x, y, z) · d` =
t2∫t1
(F1(t), F2(t)F3(t)) · ψ(t) dt =
t2∫t1
(F1x+ F2y + F3z) dt . (2.26)
PrıkladJe dan oblouk paraboly K = z = 1 − x2 − y2, y = x, x ≥ 0, z ≥ 0 orientovany ve smerurostoucı souradnice x. Mame vypocıst∫
K
F · d`, F = (xy, z,−x) .
Nejprve provedeme parametrizaci krivky K:
ψ(t) = (t, t, 1− 2t2), t ∈ 〈0,√
2/2〉.
Dale pokracujeme podle (2.26):√
2/2∫0
(t2, 1− 2t2, −t) · (1, 1,−4t) dt =
√2/2∫
0
(3t2 + 1) dt =3
4
√2.
2.3. KRIVKOVE A PLOSNE INTEGRALY 33
2.3.2 Plosne integraly
Analogicky jako u krivkovych integralu vyjadruje plosny integral I. druhu mnozstvı velicinyo hustote h na plose S:
H =
∫S
h(x, y, z) dS . (2.27)
Ve specialnım prıpade h ≡ 1 na S je cıselne roven velikosti plochy S:∫SdS = |S|.
V souladu s clankem 2.1.1 je S = [x, y, z] ∈ R3, z = f(x, y), [x, y] ∈ D ⊂ R2. Vypocet sedeje prevodem na dvojny integral pres oblast D, ktera je prumetem plochy S do roviny z = 0,pricemz pro element dS platı vztah (2.3):
H =
∫S
h(x, y, z) dS =
∫D
∫h(x, y, f(x, y))
√(∂f
∂x
)2
+
(∂f
∂y
)2
+ 1 dxdy . (2.28)
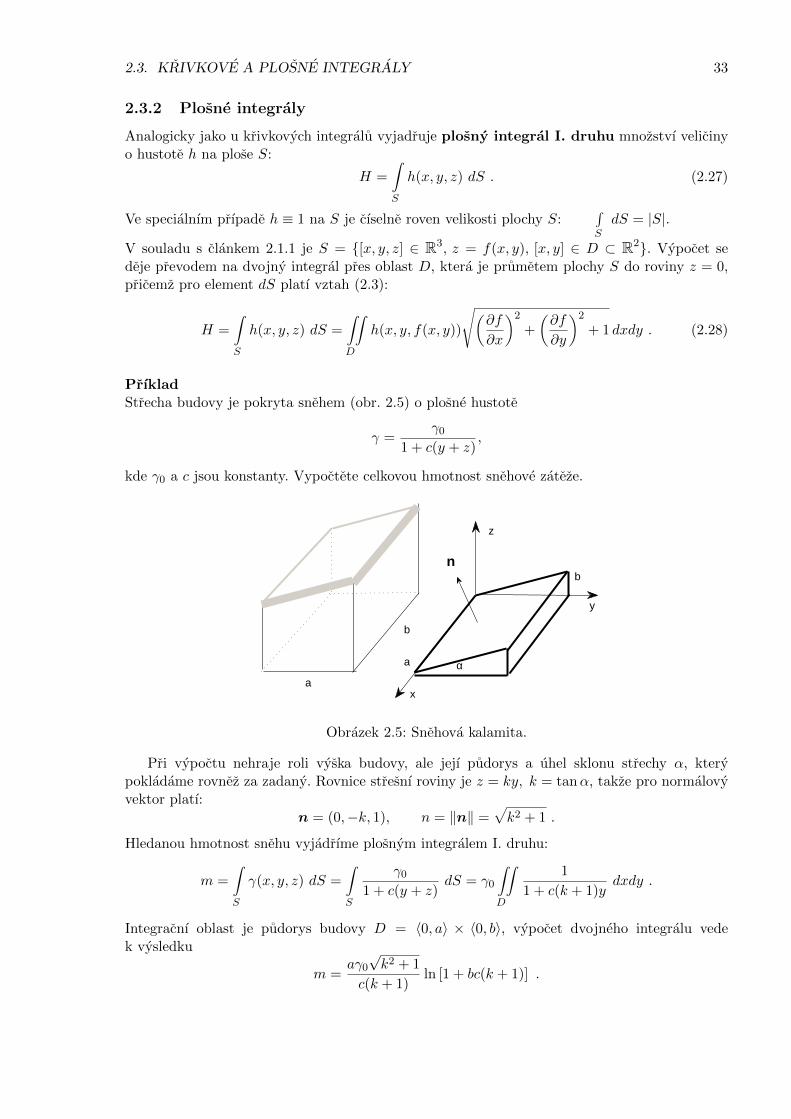
PrıkladStrecha budovy je pokryta snehem (obr. 2.5) o plosne hustote
γ =γ0
1 + c(y + z),
kde γ0 a c jsou konstanty. Vypoctete celkovou hmotnost snehove zateze.
b
a
y
x
a
b
α
z
n
Obrazek 2.5: Snehova kalamita.
Pri vypoctu nehraje roli vyska budovy, ale jejı pudorys a uhel sklonu strechy α, kterypokladame rovnez za zadany. Rovnice stresnı roviny je z = ky, k = tanα, takze pro normalovyvektor platı:
n = (0,−k, 1), n = ‖n‖ =√k2 + 1 .
Hledanou hmotnost snehu vyjadrıme plosnym integralem I. druhu:
m =
∫S
γ(x, y, z) dS =
∫S
γ0
1 + c(y + z)dS = γ0
∫D
∫1
1 + c(k + 1)ydxdy .
Integracnı oblast je pudorys budovy D = 〈0, a〉 × 〈0, b〉, vypocet dvojneho integralu vedek vysledku
m =aγ0
√k2 + 1
c(k + 1)ln [1 + bc(k + 1)] .

34 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
Pro vstupnı data a = 6 m, b = 3 m, α = 30, γ0 = 750 kgm−3, c = 6 m−1 obdrzıme hodnotu1856 kg.
Plosny integral II. druhu vektorove funkce F (x, y, z) na orientovane plose S zavadımepredpisem ∫
S
F · dS, resp.
∫S
F · n0 dS , (2.29)
kde n0 je jednotkovy vektor normaly. Vyrazy jsou kompatibilnı, druhy z nich obdrzıme z prvnıhouzitım relacı (2.2) a (2.3). Jako v prechozım prıpade uvazujeme explicitne zadanou (dvojstran-nou) plochu
S = [x, y, z] ∈ R3, z = f(x, y), [x, y] ∈ D ⊂ R2.
Jejı orientaci budeme pokladat za kladnou tehdy, svıra-li normalovy vektor ostry uhel s osou z.Vypocet plosneho integralu II. druhu se opet deje prevodem na dvojny integral:∫
S
F · dS =
∫D
∫F (x, y, f(x, y)) · n(x, y) dxdy . (2.30)
PrıkladVypocteme integral z funkce F = (0, z2, x2+y2) na casti kuzelove plochy z2 = x2+y2, 0 ≤ z ≤ 1v prvnım oktantu orientovane ve smeru vnejsı normaly.
Rovnice plochy je z =√x2 + y2, takze pro normalovy vektor platı
n(x, y) = (−f ′x, −f ′y, 1) =
(− x√
x2 + y2, − y√
x2 + y2, 1
).
Jeho smer je ovsem na cele plose ”dovnitr”kuzelove plochy, takze vzhledem k zadanı je nutnovynasobit integral znamenkem minus. Podle (2.30) tedy bude
∫S
F · dS = −∫D
∫(0, x2 + y2, x2 + y2) ·
(− x√
x2 + y2, − y√
x2 + y2, 1
)dxdy =
=
∫D
∫(y√x2 + y2 − x2 − y2) dxdy = · · · = 1
4− π
8.
Vypocet je proveden s pouzitım transformace do polarnıch souradnic.
2.3.3 Integralnı vety
Ve vektorove a tenzorove analyze je k dispozici mnozstvı matematickych vet, ktere prdstavujıvelmi ucinny nastroj pro odvozovanı a formulovanı teoretickych ni aplikacnıch uloh. Zamerımese na zakladnı vztahy, se kterymi se lze setkat. Princip dukazu provedeneho pro prıpad (Ia) lzeuplatnit i ve zbyvajıcıch vetach.
(I) Pro ϕ, vi (i = 1, 2, 3) ∈ C1(Ω) je
(a)
∫∂Ω
ϕ dS =
∫Ω
gradϕ dV , (b)
∫∂Ω
v × dS =
∫Ω
rotv dV . (2.31)
2.3. KRIVKOVE A PLOSNE INTEGRALY 35
Dukaz provedeme pouze pro rovnost (a), a to bez ujmy na obecnosti pro oblast Ω = 0 ≤x3 ≤ f(x1, x2), [x1, x2] ∈ D ⊂ R2 a tretı slozku gradientu:
∫Ω
∂ϕ
∂x3dx1dx2dx3 =
∫D
∫ f∫0
∂ϕ
∂x3dx3
dx1dx2 =
=
∫D
∫[ϕ(x1, x2, f(x1, x2))− ϕ(x1, x2, 0)] dx1dx2 =
∫∂Ω
ϕ(x1, x2, x3) dS3 .
(II) Gaussova–Ostrogradskeho veta Ma-li pole F = (F1, F2, F3) spojite diferencovatelneslozky na jednoduse souvisle oblasti Ω ohranicene (po castech) hladkou kladne orientovanouplochou ∂Ω, pak platı: ∮
∂Ω
F · dS =
∫Ω
divF dΩ . (2.32)
Kladnou orientacı uzavrene plochy rozumıme orientaci ve smeru jejı vnejsı normaly.
(III) Stokesova veta Necht’ pole F = (F1, F2, F3) ma spojite diferencovatelne slozky najednoduse souvisle oblasti Ω ∈ R3, v nız lezı hladka plocha S ohranicena hladkou souhlasneorientovanou krivkou K. Pak platı:∮
K
F · dl =
∫S
rotF · dS . (2.33)
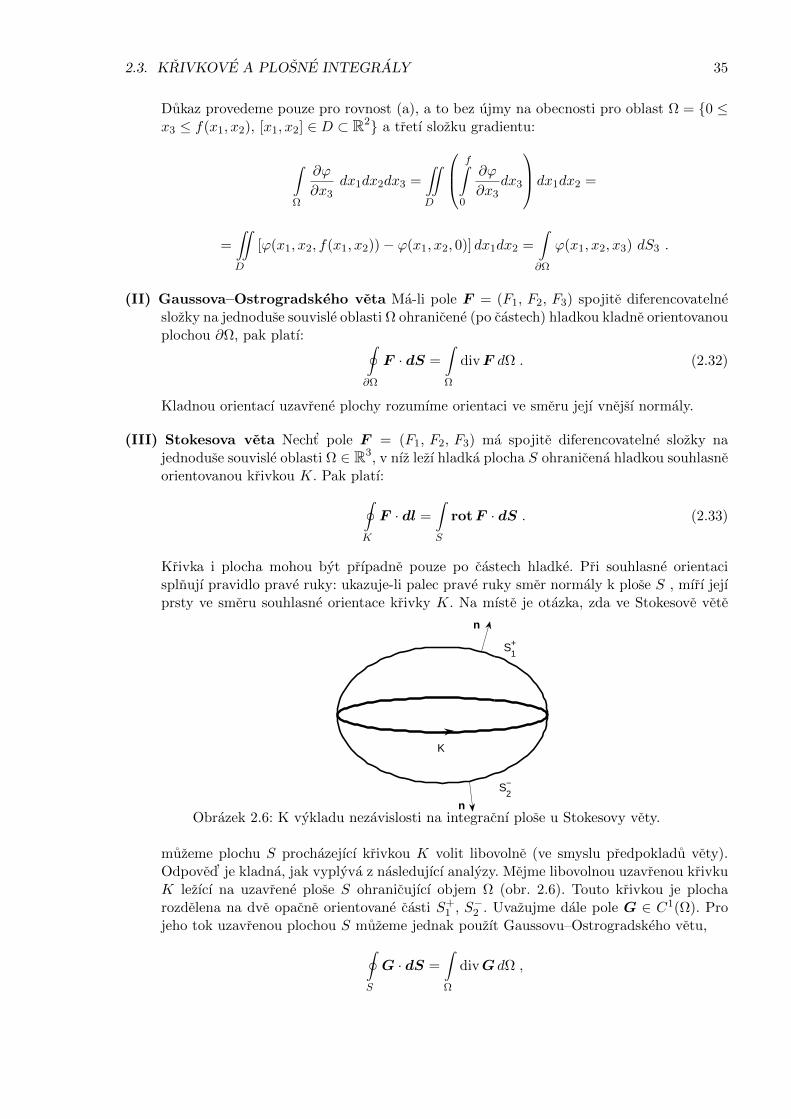
Krivka i plocha mohou byt prıpadne pouze po castech hladke. Pri souhlasne orientacisplnujı pravidlo prave ruky: ukazuje-li palec prave ruky smer normaly k plose S , mırı jejıprsty ve smeru souhlasne orientace krivky K. Na mıste je otazka, zda ve Stokesove vete
K
S1+
S2−
n
n
Obrazek 2.6: K vykladu nezavislosti na integracnı plose u Stokesovy vety.
muzeme plochu S prochazejıcı krivkou K volit libovolne (ve smyslu predpokladu vety).Odpoved’ je kladna, jak vyplyva z nasledujıcı analyzy. Mejme libovolnou uzavrenou krivkuK lezıcı na uzavrene plose S ohranicujıcı objem Ω (obr. 2.6). Touto krivkou je plocharozdelena na dve opacne orientovane casti S+
1 , S−2 . Uvazujme dale pole G ∈ C1(Ω). Pro
jeho tok uzavrenou plochou S muzeme jednak pouzıt Gaussovu–Ostrogradskeho vetu,∮S
G · dS =
∫Ω
divG dΩ ,

36 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
jednak ho muzeme urcit jako soucet plosnych integralu,∮S
G · dS =
∫S+1
G · dS +
∫S−2
G · dS .
Necht’ je nynı specialne G = rotF jako na prave strane (2.33). Protoze div rotF = 0, jecelkovy tok uzavrenou plochou S nulovy, a tedy∫
S+1
G · dS +
∫S−2
G · dS = 0 , neboli
∫S+1
G · dS =
∫S+2
G · dS .
Kterakoli z ploch jdoucıch krivkou K dava tedy pri pouzitı Stokesovy vety stejny vysledek.Vyhodu moznosti volby ukazuje prıklad (d) v nasledujıcı kapitole.
2.4 Charakteristiky tenzorovych polı
2.4.1 Globalnı charakteristiky
Tyto charakteristiky se ve vektorove analyze vyjadrujı prostrednictvım integralnıch operatoruna krivkach ci plochach nachazejıcıch se v oblasti Ω ⊂ R3. Dve zakladnı veliciny, ktere v tetosouvislosti studujeme, jsou cirkulace pole po krivce a tok pole uzavrenou plochou.
• Posuv vektoru F po krivce K se vyjadruje krivkovym integralem 2. druhu Je-li krivkapri posuvu pole F uzavrena, hovorıme o cirkulaci pole po krivce a znacıme ji
C =
∮K
F · dl . (2.34)
Pri typicke aplikaci v mechanice udava tento integral praci vykonanou silou F pusobıcıpo draze K.
• Tok vektoru plochou je reprezentovan plosnym integralem 2. druhu (orientovanym)∫S
F · dS =1
2(−1)i−1εijk
∫S
Fi dxjdxk =
∫S
F1 dx2dx3 + F2 dx1dx3 + F3 dx1dx2 , (2.35)
kde dS = (dx2dx3, dx1dx3, dx1dx2) je orientovany element plochy S. Bude-li naprıklad vpole rychlosti proudıcı tekutiny, pak tento plosny integral udava objemovy prutok plochouS za jednotku casu. V prıpade toku pole F uzavrenou plochou S pıseme
Q =
∮S
F · dS . (2.36)
Prıklady
(a) Vypocteme cirkulaci pole F = (x2 + yz, 2yz − zx, y2) po kruznici K, ktera je rezem para-bolicke plochy x2 + y2 + z = 2 rovinou z = 1. Orientace krivky je souhlasna s osou z – vizobr. 2.7.
Pro zadanou ulohu zvolıme parametrizaci ψ(t) = (cos t, sin t, 1) , t ∈ 〈0, 2π〉, takze
C =
2π∫0
(cos2 t+ sin t, 2 sin t− cos t, sin2 t
)· (− sin t, cos t, 0) dt = −
2π∫0
dt = −2π .

2.4. CHARAKTERISTIKY TENZOROVYCH POLI 37
z
y
x
1
2
0
−1 1
K
Obrazek 2.7: Kruznice na parabolicke plose.
y
x
2
0
3
n
G
G
G
G
6z
Obrazek 2.8: Tok rovinou v I. oktantu.
(b) Stanovıme tok poleG = (x, 3y+z, −2x) castı roviny 2x+3y+z−6 = 0 urcene podmınkamix ≥ 0, y ≥ 0, z ≥ 0. Normalovy vektor n je orientovan souhlasne s osou z – viz obr. 2.8.
V zadanem prıklade je z = 6 − 2x − 3y a vektor n = (2, 3, 1) je konstantnı, protoze sejedna o rovinu. Proto
Q =
∫S
G · dS =
∫Dxy
∫(x, 6− 2x, −2x) · (2, 3, 1) dx dy =
3∫0
(18− 6x)
2− 2
3x∫
0
dy
dx = 36 .
(c) Urcıme tok pole F = (xy−z2, 2xz, y−x2) vnejskem povrchu krychle 〈0, a〉×〈0, a〉×〈0, a〉.Bez pouzitı G.–O. vety by se vypocet provedl jako soucet sesti plosnych integralu presjednotlive steny krychle. Pri jejı aplikaci vsak snadno urcıme divF = y a dosadıme do

38 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
objemoveho integralu:
∮S
F · dS =
∫Ω
y dΩ =
a∫0
dx
a∫0
y dy
a∫0
dz =1
2a4 .
(d) Pouzijeme Stokesovu vetu k resenı prıkladu (a). Kruznicı K na obr. 2.7 prochazı kromegenerujıcı parabolicke plochy cela rada dalsıch ploch. Nejvyhodnejsı pro vypocet buderovina z = 1, jejız normalovy vektor n = (0, 0, 1) mame bezprostredne k dispozici.Prumetem kruznice do roviny z = 0 je obvod kruhu Dxy = x2 + y2 ≤ 1. Snadnozıskame rotF = (x, y, −2z), takze
C =
∫K
F · dl =
∫Dxy
∫(x, y, −2z) · (0, 0, 1) dx dy = −2
∫Dxy
∫dx dy = −2|Dxy| = −2π .
Symbolem |Dxy| je oznacena velikost prumetu Dxy, v nasem prıpade obsah kruhu o po-lomeru 1.
2.4.2 Lokalnı charakteristiky
Prechod od globalnıch charakteristik k lokalnım je realizovan limitnım procesem, prinemz zmensujeme objem (plochu), kde je globalne bilancovana dana velicina, az do jedinehobodu. Zavedeme velicinu µ(Ω) jako mıru oblasti Ω, naprıklad jejı objem, povrch, polomer apod.Dale budeme predpokladat, ze hustota f(x) je na referencnı oblasti spojita funkce, f ∈ C(Ω).Pak proces spojiteho zmensovanı oblasti Ω az do nejakeho bodu M muzeme symbolicky vyjadritrelacı
Ω −→M ⇐⇒ µ(Ω) −→ 0 .
Aplikujeme-li tento princip na objemovy integral na oblasti Ω, obdrzıme zobecnenou definicistrednı integralnı hodnoty ve tvaru
limµ→0
1
µ(Ω)
∫Ω
f dV = f(M) . (2.37)
Tento limitnı prechod dava moznost definovat podle Gaussovy-Ostrogradskeho vety (2.32) di-vergenci pole v jako lokalnı charakteristiku v bode M :
limµ→0
1
µ(∂Ω)
∫∂Ω
v · dS = divv . (2.38)
V analogii s obecnym prıpadem je tedy divergence pole hustotou (mırou) jeho zrıdlovosti. Po-dobne lze lokalne zavest s vyuzitım formulı (2.31) zbyvajıcı dva diferencialnı operatory:
limµ→0
1
µ(∂Ω)
∫∂Ω
udS = gradu , (2.39)
limµ→0
1
µ(∂Ω)
∫∂Ω
v × dS = rotv . (2.40)
Poslednı relace ukazuje rotaci jako mıru vırovosti. Vhodnou aplikacı diferencialnıch operatoruna konkretnı fyzikalnı pole muzeme v libovolnem bode (tj. lokalne) zıskat informace o jehovlastnostech.

2.4. CHARAKTERISTIKY TENZOROVYCH POLI 39
Gradient a derivace ve smeruMejme dano skalarnı pole T = T (x1, x2, x3) a zvolme libovolny smer jako vektor s = (s1, s2, s3).Derivaci funkce T ve smeru s definujeme jako skalarnı velicinu
∂T
∂s= s0 · gradT , s0 =
s
‖s‖,
kde s0 je jednotkovy (normovany) vektor s. Dusledkem je znamy fakt, ze gradient funkceT = T (X) udava smer nejvetsı zmeny teto funkce v bode X. Je to zrejme z nasledujıcıho vyjadrenıderivace ve smeru:
s0 · gradT = ‖s0‖ ‖gradT (X)‖ cosα .
Protoze ‖s0‖ = 1, bude tento vyraz maximalnı tehdy, kdyz pro uhel α mezi gradientem a vekto-rem s bude platit cosα = 1. To nastane pro α = 0, tj. splynou-li smery vektoru s a grad T (X).
Zrıdlovost poleAplikujeme-li operator divergence na vektorove pole T v bode X = (x1, x2, x3), obdrzımeskalarnı hodnotu (cıslo). Je-li divT (X) = 0, nazyva se X nezrıdlovy bod. Je-li divT (X) 6= 0,je X zrıdlovym bodem. Specielne se X nazyva zrıdlo, je-li divT (X) > 0, resp. propad, kdyzdivT (X) < 0.
Platı-li na nejake oblasti Ω divT = 0 (divT 6= 0), rıkame, ze pole T je na teto oblastinezrıdlove (zrıdlove). Divergence tedy umoznuje charakterizovat mıru zrıdlovosti pole nebolidistribuci zdroju na oblasti Ω.
PrıkladUkazeme, ze pole F = (x2
1x2, −2x2x3, x23 − 2x1x2x3) je nezrıdlove na libovolne oblasti v R3.
divF =∂Fi∂xi
= 2x1x2 − 2x3 + 2x3 − 2x1x2 = 0 .
Pro nezrıdlove pole, v nemz divF = 0 na Ω, platı jako dusledek Gaussovy–Ostrogradskehovety ∮
S
F · dS = 0 .
Opacne tvrzenı vsak neplatı: je-li∮SF · dS = 0, pak muze jıt jak o nezrıdlove pole, tak o pole
zrıdlove, v nemz vsak jsou kladne a zaporne zdroje v rovnovaze.
Vırovost poleJestlize na oblasti Ω platı rotT = o (rotT 6= o), nazyva se pole T nevırove (vırove). Podle2.2.3 je rot gradϕ = o pro kazdou funkci ϕ ∈ C2(Ω). Proto lze nevırove pole T vyjadrit jakogradient jisteho skalarnıho pole ϕ, tj. T = gradϕ. Pole ϕ se nazyva potencial vektoroveho poleT (pole T je potencialove).
Prıklady
(a) Vysetrıme vırovost rychlostnıho pole tuheho telesa rotujıcıho kolem osy s konstantnı uhlovourychlostı ω. Bez ujmy na obecnosti budeme uvazovat rotaci kolem osy x3 = z – viz obrazek2.9, kde je dale
ω = (0, 0, ω) . . . vektor uhlove rychlosti,
r = (x, y, z) . . . polohovy vektor libovolneho bodu telesa,
v = ω × r = (−ωy, ωx, 0) . . . postupna (obvodova) rychlost, protoze v⊥ω, v⊥r.

40 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
x
y
z
r
vω
Obrazek 2.9: Rotace kolem osy.
Vypoctem obdrzıme rotaci rychlostnıho pole rotv = (0, 0, 2ω). Tento vysledek ukazuje,ze rychlostnı pole rotujıcıho telesa je vzdy vırove.
(b) Mejme vektorove pole F = (x2x3, x1x3, x1x2). Snadno lze ukazat, ze je nevırove, nebot’
rotF = (0, 0, 0) = o. Proto existuje jeho potencial ϕ takovy, ze F = gradϕ.Toto pole je navıc nezrıdlove, protoze divF = 0. Spojenım techto dvou vlastnostı dostavame
div gradϕ = 0 neboli ∆ϕ = 0 ,
coz je Laplaceova diferencialnı rovnice. Protoze kazda funkce, ktera vyhovuje teto rovnici,se nazyva harmonicka, je skalarnı pole ϕ harmonicke.
2.4.3 Prıklad – Maxwellovy rovnice
Predchozı poznatky se s vyhodou uplatnı pri odvozenı Maxwellovych rovnic ze zakladnıch fy-zikalnıch zakonu elektromagnetismu, jak ilustrujı nasledujıcıch prıklady variant v integralnımi diferencialnım tvaru.
Gaussuv zakonJe-li ρ(r) hustota elektrickeho naboje v objemu Ω, vypocte se celkovy naboj Q jako objemovyintegral z teto hustoty. Tato produkce zdroju je rovna toku elektricke indukce povrchem ∂Ω, tj.platı ∫
Ω
ρ(r) dV =
∫∂Ω
D · dS . (2.41)
Jestlize na plosny integral uplatnıme Gaussovu-Ostrogradskeho vetu a provedeme prechod k lo-kalnım charakteristikam, obdrzıme prıslusnou rovnici ve znamem diferencialnım tvaru
divD = ρ . (2.42)
Specialne je pak divD = 0 pro nezrıdlove pole (objem bez volnych naboju).Jedna-li se o anizotropnı prostredı, je jeho permitivita tenzorem 2. radu. Dosadıme-li do (2.42)prıslusnou konstitucnı relaci D = εE, bude
∂
∂xi(εijEj) = ρ , resp. εij
∂Ej∂xi
= ρ (2.43)
(dvakrat zuzeny tenzor 4. radu). Druhy z vyrazu platı v homogennım prostredı.

2.4. CHARAKTERISTIKY TENZOROVYCH POLI 41
Faradayuv zakonElektricke napetı U indukovane ve vodive uzavrene smycce v promennem magnetickem polio indukcnım toku Φ je rovno casove zmene tohoto toku, tj. U = −dΦ/dt.Oznacıme-li S libovolnou hladkou plochu prochazejıcı uzavrenou smyckou K, muzeme napetı aindukcnı tok vyjadrit nasledovne:
U =
∫K
E · d` , Φ =
∫S
B · dS ,
kde E, B jsou po rade vektory elektricke intenzity a magneticke indukce. V rovnosti∫K
E · d` = − ∂
∂t
∫S
B · dS
pouzijeme na leve strane Stokesovu vetu, abychom na obou stranach rovnice disponovali stejnymtypem integralu: ∫
S
(∇×E) · dS = − ∂
∂t
∫S
B · dS . (2.44)
Limitnım prechodem lze pak zıskat formulaci Faradayova zakona v diferencialnım tvaru
rotE = −∂B/∂t . (2.45)
2.4.4 Nezavislost na integracnı ceste
V nevırovem poli (rotF = 0) musı byt cirkulace∮K F · dl = 0 pro libovolnou uzavrenou
krivku K. Soucasne plyne z podmınky F = gradU existence potencialu U(x, y, z). Nenı-likrivka uzavrena, muzeme vypocet krivkoveho integralu snadno provest nasledujıcım zpusobem.Pri parametrizaci ψ(t) = (x(t), y(t), z(t)), t ∈ 〈t1, t2〉 oznacıme po rade A a B jejı pocatecnıa koncovy bod, takze bude ψ(t1) = A, ψ(t2) = B. Pak platı:∫
K
F · dl = [U(x, y, z)]BA = U(B)− U(A) , (2.46)
nebot’ podle formule pro derivaci slozene funkce je
∫K
gradU · dl =
t2∫t1
gradU(ψ(t)) · ψ(t) dt =
t2∫t1
[U ′xx(t) + U ′yy(t) + U ′z y(t)] dt =
t2∫t1
U(t) dt .
Tento vysledek znamena, ze v potencialovem poli hodnota krivkoveho integralu nezavisı naintegracnı ceste. Jeden ze zpusobu stanovenı potencialu ukazuje dalsı prıklad.
PrıkladMame vypocıst integral I =
∫KF · dl, kde F = (2xy − z, x2, 2z − x) a krivka K je usecka mezi
body A= [1, 1, 1] a B= [2, 3, 4].
Nejprve vypoctem overıme, ze jde o potencialove pole, nebot’ rotF = o. Jelikoz F = gradU ,bude
∂U∂x = 2xy − z =⇒ U =
∫(2xy − z) dx = x2y − zx+ C1(y, z),
∂U∂y = x2 =⇒ U =
∫x2 dy = x2y + C2(x, z),
∂U∂z = 2z − x =⇒ U =
∫(2z − x) dz = z2 − xz + C3(x, y).

42 KAPITOLA 2. ZAKLADY TENZOROVE ANALYZY
Hledany potencial je sjednocenım teto trojice funkcı:
U(x, y, z) = x2y − zx+ z2 + C.
Pro integral I pak podle (2.46) dostavame
I = [x2y − zx+ z2][2,3,4][1,1,1] = 19 .
Cvicenı
(1) Intenzita elektrostatickeho pole bodoveho naboje q v prostredı s permitivitou ε umıstenehov pocatku souradneho systemuje dana vztahem
E =q
4πε
r
r3.
Dokazte, ze pole E je pro r 6= 0 nezrıdlove a nevırove.
(2) Zmena energie U idealnıho plynu pri adiabatickem deji je vyjadrena jako soucet dodaneho(uvolneneho) tepla Q a vykonane (spotrebovane) prace A rovnicı
δU = δQ+ δA = cv dT + p dV ,
kde p, V, T jsou stavove veliciny (tlak, objem a teplota) a cv je merne teplo pri konstantnımobjemu. S pouzitım stavove rovnice idealnıho plynu (p V = RT ) dokazte, ze tato zmenanema potencialovy charakter a posud’te dusledky teto skutecnosti.
(3) Vypoctete posuv pole G = (z, z, −y) po usecce z bodu [1, 0, 1] do bodu [0, 1, 0].
(4) Urcete tok pole G z predchozıho prıkladu povrchem casti kulove plochy x2 + y2 + z2 = r2,x ≥ 0, y ≥ 0, z ≥ 0 ve smeru vnejsı normaly.
(5) Jakou praci vykona sıla F = (x + y, y − z, y) pusobıcı po obvodu trojuhelnıka vyt’atehov rovine 2x + 3y + z − 6 = 0 souradnymi rovinami? (Pozn.: trojuhelnık je znazornen naobr. 2.8.)
(6) Vycıslete tok pole F = (2xz, y, x) vnejskem povrchu valce x2 + y2 ≤ 9, 0 ≤ z ≤ 6.
(7) Dokazte, ze pole G = (y2 + z, 2xy − z2, x − 2yz) je potencialove a vypoctete jeho posuvmezi body [−1,−1,−2] a [1, 1, 2].
Kapitola 3
Aplikace tenzoroveho aparatu
3.1 Tenzor setrvacnosti
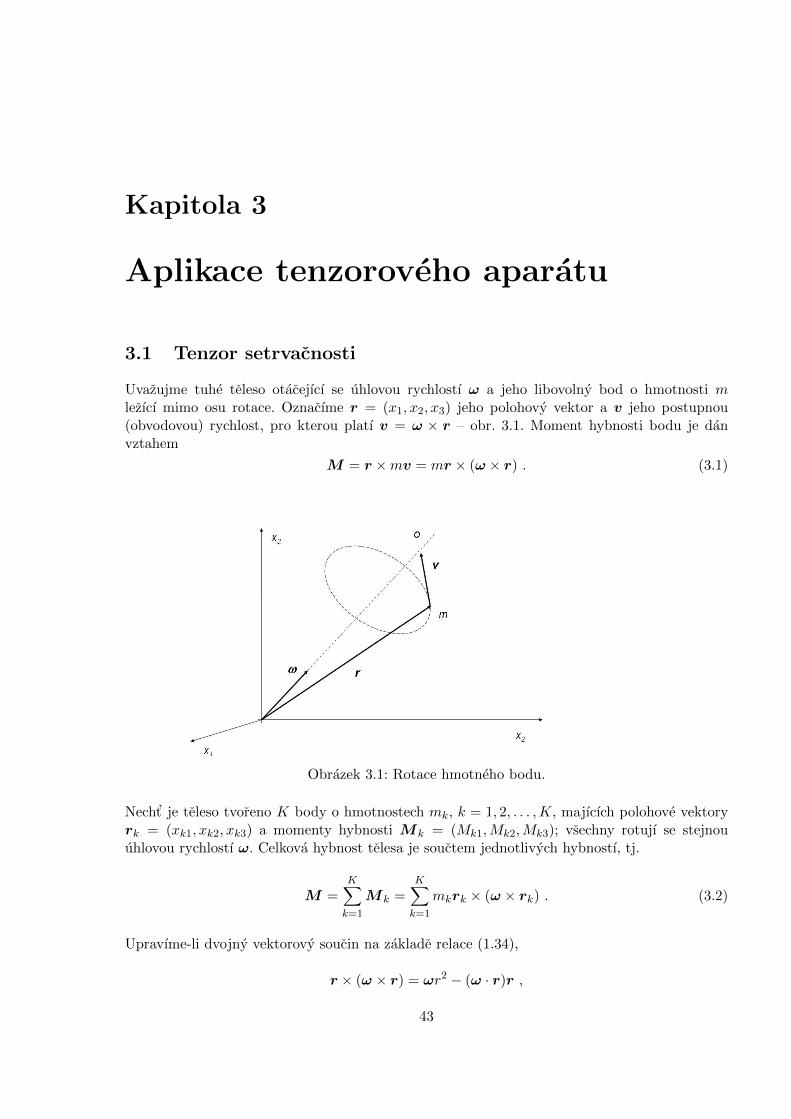
Uvazujme tuhe teleso otacejıcı se uhlovou rychlostı ω a jeho libovolny bod o hmotnosti mlezıcı mimo osu rotace. Oznacıme r = (x1, x2, x3) jeho polohovy vektor a v jeho postupnou(obvodovou) rychlost, pro kterou platı v = ω × r – obr. 3.1. Moment hybnosti bodu je danvztahem
M = r ×mv = mr × (ω × r) . (3.1)
Obrazek 3.1: Rotace hmotneho bodu.
Necht’ je teleso tvoreno K body o hmotnostech mk, k = 1, 2, . . . ,K, majıcıch polohove vektoryrk = (xk1, xk2, xk3) a momenty hybnosti Mk = (Mk1,Mk2,Mk3); vsechny rotujı se stejnouuhlovou rychlostı ω. Celkova hybnost telesa je souctem jednotlivych hybnostı, tj.
M =K∑k=1
Mk =K∑k=1
mkrk × (ω × rk) . (3.2)
Upravıme-li dvojny vektorovy soucin na zaklade relace (1.34),
r × (ω × r) = ωr2 − (ω · r)r ,
43

44 KAPITOLA 3. APLIKACE TENZOROVEHO APARATU
lze po uprave predchozı rovici napsat v maticovem tvaru
M1
M2
M3
=
K∑k=1
mk(x2k2 + x2
k3) −K∑k=1
mkxk1xk2 −K∑k=1
mkxk1xk3
−K∑k=1
mkxk1xk2
K∑k=1
mk(x2k1 + x2
k3) −K∑k=1
mkxk2xk3
−K∑k=1
mkxk1xk3 −K∑k=1
mkxk2xk3
K∑k=1
mk(x2k1 + x2
k2)
ω1
ω2
ω3
nebo usporneji ve tvaru tenzorovem:
Mi = Jijωj , (3.3)
kde J je tenzor setrvacnosti s prvky
Jij =
−
K∑k=1
mkxkixkj , i 6= j ,
K∑k=1
mk(x2kl + x2
kn), i = j 6= l 6= n .
(3.4)
Diagonalnı prvky J11, J22 a J33 predstavujı momenty setrvacnosti vzhledem k souradnym osam,mimodiagonalnı prvky se nazyvajı deviacnı momenty. Pokud je osa rotace telesa soucasne jehoosou soumernosti, deviacnı momenty vymizı. V opacnem prıpade dochazı pri rotaci k nepravi-delnemu (nezadoucımu) namahanı telesa. Specialne: pro bod na ose rotace je ω = λr s jistoukonstantou λ (viz obrazek), takze B = o.
Cvicenı
Overte predchozı vysledek pomocı tenzorovych operacı s pouzitım vzorce (3) v clanku 1.6.2.Zduvodnete tenzorovy charakter veliciny J.
3.2 Staticka teorie elasticity
Matematicky aparat staticke (a nasledne i dynamicke) teorie pruznosti patrı k typickym oblas-tem, v nichz se uplatnujı prednosti tenzoroveho poctu. Budeme venovat vlastnostem tenzorunapetı a deformace a rovnez jejich vzajemnemu vztahu, ktery je predstavovan zobecnenym Ho-okeovym zakonem.
3.2.1 Motivace
Pro urcenı vztahu mezi napetım τ a deformacı e je prvorade vymezit oblast jevu, jejichz po-pis chceme formulovat. Uvazujme jako modelovou situaci tahovou zkousku dlouhe uzke tyce.Predpokladame, ze je podrobena jednosmernemu tahu silou o velikosti F ve smeru osy x1 (obr.3.2), pricemz se jejı prurez S nemenı.
Pri pusobıcım normalovem napetı τ = F/S prodlouzı tahova sıla tyc delky l o ∆l, takze defor-mace je rovna pomernemu prodlouzenı e = ∆l/l.
Diagram tahove zkousky na obr. 3.3 ukazuje prıklad vztahu mezi napetım a deformacı (jedna seo urcity typ oceli). Vyznamne body na grafu predstavujı
mez pevnosti τc ;
mez kluzu τb ;
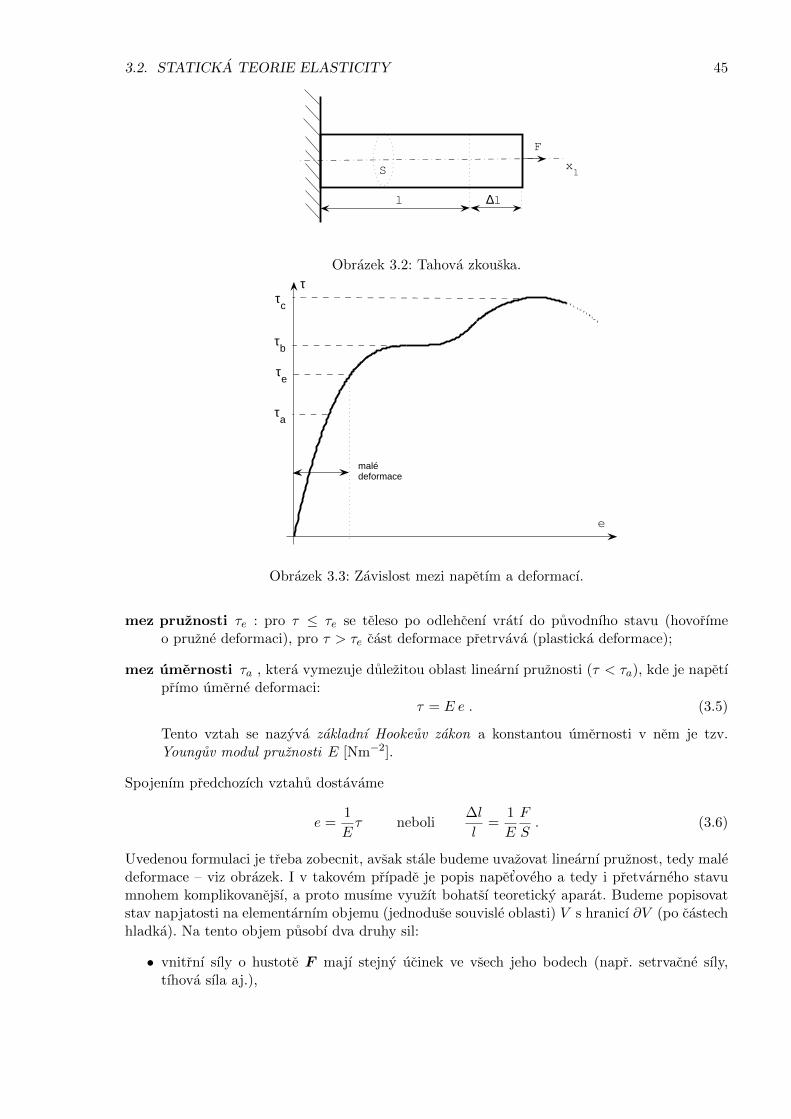
3.2. STATICKA TEORIE ELASTICITY 45
S
F
x1
∆ll
Obrazek 3.2: Tahova zkouska.
malédeformace
e
τ
τb
τe
τa
τc
Obrazek 3.3: Zavislost mezi napetım a deformacı.
mez pruznosti τe : pro τ ≤ τe se teleso po odlehcenı vratı do puvodnıho stavu (hovorımeo pruzne deformaci), pro τ > τe cast deformace pretrvava (plasticka deformace);
mez umernosti τa , ktera vymezuje dulezitou oblast linearnı pruznosti (τ < τa), kde je napetıprımo umerne deformaci:
τ = E e . (3.5)
Tento vztah se nazyva zakladnı Hookeuv zakon a konstantou umernosti v nem je tzv.Younguv modul pruznosti E [Nm−2].
Spojenım predchozıch vztahu dostavame
e =1
Eτ neboli
∆l
l=
1
E
F
S. (3.6)
Uvedenou formulaci je treba zobecnit, avsak stale budeme uvazovat linearnı pruznost, tedy maledeformace – viz obrazek. I v takovem prıpade je popis napet’oveho a tedy i pretvarneho stavumnohem komplikovanejsı, a proto musıme vyuzıt bohatsı teoreticky aparat. Budeme popisovatstav napjatosti na elementarnım objemu (jednoduse souvisle oblasti) V s hranicı ∂V (po castechhladka). Na tento objem pusobı dva druhy sil:
• vnitrnı sıly o hustote F majı stejny ucinek ve vsech jeho bodech (napr. setrvacne sıly,tıhova sıla aj.),

46 KAPITOLA 3. APLIKACE TENZOROVEHO APARATU
• plosne sıly o hustote T pusobıcı zvnejsku ruznym zpusobem v bodech jeho povrchu (jdeo pusobenı okolnıch elementu).
Jejich ucinek je vyjadren vektorem posuvu pro libovolny bod telesa. Jelikoz prıma vzajemnazavislost je k dispozici jen ve velmi jednoduchych prıpadech (viz vyse), je nutno napet’ove-pretvarny stav popsat pomocı tenzoru napetı a deformace. Klıcovou roli pak hraje vazba mezitemito tenzory, kterou zprostredkovava zobecneny Hookeuv zakon (viz schema na obr. 3.4). Nezse jım budeme zabyvat podrobneji, vratıme se nekolika poznamkami k uvedenym tenzorum.
Objemové síly F
Povrchové síly T Vektor posuvů u
Tenzor napětí Tenzor deformace e Zobecněný
Hookeův zákon
známe
jen ve speciálních případech chceme zjistit
Obrazek 3.4: Schema modelovanı napet’ove-pretvarneho procesu.
3.2.2 Specialnı prıpady tenzoru napetı
Tento tenzor jsme zavedli v kapitole 1.4. Vsimneme si nejprve nekolika typickych atributu vek-toru napetı (ν0 je jednotkovy vektor normaly):
1. T(ν) = −T(−ν) (zakon akce a reakce),
2. T(ν) · ν0 = N (normalove napetı),
3. T(ν) −N.ν0 = S, S = ‖S‖ (tecne napetı).
Dusledkem prvnı vlastnosti je symetrie tenzoru napetı, kterou exaktne overıme v casti 3.4.1.Proto muzeme vztah (1.27) pouzıvat ve tvaru
T(ν)i = τijνj , (3.7)
Specialnı prıpady
(a) Homogennı napetı. Deviator = 0 ⇒ neexistujı smykova napetı, Cauchyho kvadrika jekulova plocha.
τ =
τ 0 00 τ 00 0 τ
.
(b) Jednoduchy (jednosmerny) tlak nebo tah (zde: ve smeru osy x1):
τ =
τ 0 00 0 00 0 0
.

3.2. STATICKA TEORIE ELASTICITY 47
Cauchyho kvadrika ma rovnici τx21 = k2, ktera predstavuje dve rovnobezne roviny, na
ktere je pusobıcı sıla kolma.
(c) Jednoduche rovinne napetı (v rovine kolme na osu x3):
τ =
τ1 0 00 τ2 00 0 0
.
Prıkladem je mimo jine membrana.
(d) Jednoduchy smyk je charakterizovan tenzorem, kterym je pouze deviator reprezentujıcısmykova napetı (zde: smyk je iniciovany opacnymi silami rovnobeznymi s osou x2 a pusobı-cımi v paralelnıch rovinach kolmych na osu x1):
τ =
0 τ 0τ 0 00 0 0
,
3.2.3 Rovnice kompatibility deformacı
Zname-li vektor posunutı u, muzeme jednoznacne stanovit sestici slozek tenzoru malych defor-macı ejk na zaklade vztahu
ejk =1
2
(∂uj∂xk
+∂uk∂xj
). (3.8)
Resıme-li opacnou ulohu, mame k dispozici 6 rovnic
∂uj∂xk
+∂uk∂xj
= 2ejk (3.9)
pro tri nezname funkce ui(x). V tomto prıpade nenı resenı urceno jednoznacne, a proto je trebahledat doplnujıcı vztahy mezi slozkami tenzoru ejk.Deformace telesa se sklada z lokalnıch zmen velikosti a orientace jeho elementu a dale z rotacıa posuvu celeho telesa v prostoru. Obojı se deje soucasne, lze vsak pracovat s predpokladem, zevysledny stav po deformaci by byl stejny i v prıpade, ze by jednotlive zmeny probıhaly oddelenev libovolnem poradı. Jednotlive zmeny se tedy navzajem doplnujı, jsou kompatibilnı. Podmınkupro platnost tohoto predpokladu muzeme formulovat tak, ze teleso spojite (kompaktnı) preddeformacı zustava spojite i po deformaci, coz je ekvivaletnı s pozadavkem ejk ∈ C2(Ω).Exaktnım vyjadrenım uvedenych vlastnostı jsou tzv. Saint–Venantovy rovnice kompatibility,ktere mohou byt formulovany naprıklad takto:Necht’ Ω je konvexnı teleso. Pak ejk ∈ C2(Ω) jsou prvky tenzoru malych deformacı, prave kdyzsplnujı nasledujıcı vztahy:
εiklεjmn∂2ekm∂xl∂xn
= 0 pro i, j = 1, 2, 3 . (3.10)
PrıkladJako ukazku rozepıseme jednu ze sesti vyse uvedenych rovnic kompatibility, konkretne proi = 1, j = 2:
∂
∂x3
(∂e23
∂x1+∂e13
∂x2− ∂e12
∂x3
)− ∂2e33
∂x1∂x2= 0 .
Cvicenı

48 KAPITOLA 3. APLIKACE TENZOROVEHO APARATU
1. Overte tenzorovy charakter tenzoru napetı.
2. Rovinna napjatost desky v rovine xy je popsana tenzorem
τ =
[τ11 τ12
τ12 τ22
].
Odvod’te slozky tohoto tenzoru pri otocenı v rovine o uhel φ. Reste nejprve obecne a potevysledek zapiste pro φ = π/3.
3. Zapiste rovnici kompatibility pro i = j = 3.
3.3 Zobecneny Hookeuv zakon
3.3.1 Zobecneny Hookeuv zakon
Je-li v trojrozmernem prıpade vztah mezi napetım a deformacı linearnı, platı zobecneny Hookeuvzakon ve tvaru
τij = cijklekl , (3.11)
kde cijkl je tenzor elastickych koeficientu, ktery ma teoreticky 81 slozek. Ve skutecnosti je vsakurcen pouze jednadvaceti slozkami, nebot’ platı
cijkl = cjikl , cijkl = cijlk (ekl, τij jsou symetricke) ,
cijkl = cklij atd. (zakon akce a reakce) .
Jedna-li se o izotropnı material, je tenzor elastickych koeficientu nutne izotropnı a lze ho vyjadrittenzorem ηijkl, ktery jsme poznali v prıkladu v casti 1.3.3:
ηijkl = A.δijδkl +B.δikδjl + C.δilδjk (3.12)
Zavedeme nejprve novou trojici konstant temito vztahy:
λ = A, µ =B + C
2, ν =
B − C2
,
takze bude
ηijkl = λδijδkl + µ(δikδjl + δilδjk) + ν(δikδjl − δilδjk) .
Tento vyraz dosadıme do (3.11) za tenzor elastickych koeficientu:
τij = ηijklekl = λδijδklekl + µ(δikδjl + δilδjk)ekl + ν(δikδjl − δilδjk)ekl =
= λδijekk + µ(δikejk + δilejl︸ ︷︷ ︸= 2eij
) + ν(δikejk − δilejl︸ ︷︷ ︸= 0
) .
Ozznacıme-li ϑ = e11 + e22 + e33 = ekk invariant tenzoru deformace, dostavame predchozıvysledek ve tvaru
τij = λδijϑ+ 2µeij , (3.13)
coz je hledany zobecneny Hookeuv zakon pro izotropnı teleso. Veliciny λ, µ se nazyvajı Lameovykoeficienty a udavajı vlastnosti telesa pri deformaci.

3.3. ZOBECNENY HOOKEUV ZAKON 49
Inverznı Hookeuv zakonVyjadrıme nynı tenzor deformace prostrednictvım slozek tenzoru napetı. Podle (3.13) je
eij =1
2µ(τij − λδijϑ) , (3.14)
potrebujeme vsak jeste urcit vztah mezi invarianty ϑ a τjj = τ11 +τ22 +τ33 = θ. Zapıseme (3.13)postupne pro diagonalnı slozky tenzoru napetı a secteme, takze obdrzıme
τ11 + τ22 + τ33 = 3λϑ+ 2µ(e11 + e22 + e33) neboli θ = (3λ+ 2µ)ϑ .
To znamena, ze relaci
ϑ =1
3λ+ 2µθ .
muzeme pouzıt v (3.14) s vysledkem
eij =1
2µ
(τij −
λ
3λ+ 2µδijθ
), (3.15)
ktery oznacujeme jako inverznı Hookeuv zakon.
3.3.2 Elasticke moduly
Lameovy (elasticke) koeficienty nemajı prımy fyzikalnı ani technicky vyznam, proto se snazımepreformulovat Hookeuv zakon pomocı jinych velicin nazyvanych elasticke moduly, ktere lzesnadno interpretovat.Uvazujme nejprve (3.15) pouze pro slozku τ11 za predpokladu, ze zbyvajıcı dve diagonalnı kom-ponenty jsou nulove, tedy
e11 =1
2µ
(τ11 −
λ
3λ+ 2µτ11
).
Odtud muzeme podle (3.6) vyjadrit Younguv modul pruznosti
E =τ11
e11=µ(3λ+ 2µ)
λ+ µ. (3.16)
Dale vyjadrıme za stejnych predpokladu slozku e22:
e22 = − λ
2µ(3λ+ 2µ)τ11 .
Jestlize |e11| predstavuje podelnou deformaci, pak |e22| vyjadruje deformaci prıcnou. Jejichpodıl ν se nazyva Poissonova konstanta a lze pro ni za pouzitı (3.16) odvodit vztah
ν =
∣∣∣∣e22
e11
∣∣∣∣ =λ
2(λ+ µ). (3.17)
Po nahrazenı Lameovych koeficientu λ, µ elastickymi moduly E, ν dostavame obe verze Hooke-ova zakona v nasledujıcım tvaru:
τij =E
1 + ν
(eij +
ν
1− 2νϑδij
), eij =
1
E((1 + ν)τij − νθδij) . (3.18)
Prıklady

50 KAPITOLA 3. APLIKACE TENZOROVEHO APARATU
(a) Urcıme invarianty pri vsesmernem tlaku (naprıklad hydrostaticky tlak zvnejsku na stenykrychle). Tenzor napetı τij = −p.δij je v tomto prıpade izotropnı, a proto
θ = τii = −3p , ϑ =1
3λ+ 2µθ =
−3p
3λ+ 2µ= − p
λ+ 23µ
= −1
kp .
Velicina k = λ+ 23µ se nazyva modul stlacitelnosti.
(b) Ukazeme vztah mezi napetım a smykovym uhlem pri jednoduchem smyku. Uvazujme situacipodle obr. 3.5, kde pro smykovy uhel platı α2,3 = 2e23. Ve vztahu pro napetı vyjadreneHookeovym zakonem (3.13) je invariant ϑ = 0 , takze τij = 2µeij , tj. τ23 = 2µe23. Spojenımposlednıch dvou vztahu dostavame
α2,3 =1
µτ23 =
1
µ
F
S.
Koeficient µ se casto pouzıva s oznacenım G pod nazvem modul smyku.
x1
x2
x3
α1,2
F
Obrazek 3.5: Jednoduchy smyk ve smeru osy x2.
CvicenıOdvod’te prevodnı vztahy mezi Lameovymi koeficienty a elastickymi moduly:
µ =E
2(1 + ν), λ =
νE
(1 + ν)(1− 2ν). (3.19)
3.4 Rovnice mechaniky kontinua
3.4.1 Podmınky rovnovahy
Rovnovaha silZobecnıme nynı bilancnı vztah (1.25) pro libovolny elementarnı objem V s charakteristickymrozmerem h. Rovnovaha sil na tomto elementu pak znamena, ze vyslednice celkovych objemovychsil F a plosnych sil T je nulova: ∫
VFi dV +
∫∂VTi dS = 0 . (3.20)
Za Ti dosadıme vyjadrenı pomocı tenzoru napetı:∫VFi dV +
∫∂Vτjiνj dS = 0 . (3.21)

3.4. ROVNICE MECHANIKY KONTINUA 51
Za predpokladu τji ∈ C1(V ) aplikujeme na tuto rovnici Gaussovu–Ostrogradskeho vetu a do-stavame jediny objemovy integral ∫
V
(Fi +
∂τji∂xj
)dV = 0 . (3.22)
Po vydelenı objemem |V | a limitnım prechodu pro h → 0 zıskame diferencialnı tvar soustavyrovnic rovnovahy sil:
∂τji∂xj
+ Fi = 0 . (3.23)
Rovnovaha momentuMomentem sıly F rozumıme jejı vektorovy soucin s polohovym vektorem x bodu X, v nemzpusobı, tj. M = x×F . Budeme-li v zakladnı rovnici rovnovahy (3.20) uvazovat mısto sil jejichmomenty, bude (pro jednotkovou normalu ν)∫
V(x× F )i dV +
∫∂V
[x× T (x, ν)]i dS = 0 . (3.24)
Zapıseme tento vztah za pouzitı Levi–Civitova tenzoru,∫VεijkxjFk dV +
∫∂Vh
εijkxjτmkνm dS = 0 .
a pouzijeme Gaussovu–Ostrogradskeho vetu:∫Vεijk
(xjFk +
∂(xjτmk)
∂xm
)dV = 0 .
Po derivovanı soucinu (∂xj/∂xm = δjm) muzeme integral prepsat takto:∫Vεijkxj
(Fk +
∂τmk∂xm
)dV +
∫Vεijkδjmτmk dV = 0 .
Prvnı clen je nulovy vzhledem k (3.23), ve druhem provedeme uzenı v indexu m,∫Vεijkτjk dV = 0 ,
a nasledne limitnı prechod pro h→ 0. Vysledkem je relace
εijkτjk = 0 tj. τjk = τkj . (3.25)
Z rovnovahy momentu tedy plyne symetrie tenzoru napetı. Tento dulezity vysledek je prımymdusledkem zakona akce a reakce.
3.4.2 Staticke rovnice pruznosti
Popisujeme stav pruzneho telesa Ω rovnicemi pro slozky vektoru posuvu ui za techto predpokladu:
λ(x), µ(x) ∈ C1(Ω), Fi ∈ C1(Ω), ui ∈ C2(Ω) .
Jako vychozı vztah pouzijeme podmınky rovnovahy (3.23), v nichz vyjadrıme tenzor napetıpomocı Hookeova zakona (3.13) τij = λδijϑ+ 2µeij a prejdeme pomocı (3.8) ke slozkam vektoruposuvu:
∂
∂xj
(λ∂ui∂xi
)+
∂
∂xj
[µ
(∂ui∂xj
+∂uj∂xi
)]+ Fi = 0 (3.26)

52 KAPITOLA 3. APLIKACE TENZOROVEHO APARATU
Tım jsme zıskali obecne Lameovy rovnice pro posuvy, ktere pro homogennı teleso (λ, µ = const.)nabyvajı tvaru
(λ+ µ)∂2uj∂xi∂xj
+ µ∂2ui∂x2
j
+ Fi = 0 . (3.27)
Lze se s nimi setkat i ve znamejsın vektorovem vyjadrenı:
(λ+ µ) grad divu+ µ∆u+ F = o . (3.28)
3.4.3 Dynamicke rovnice
Budeme nynı navıc uvazovat posuvy jako funkce casu u = u(x, t), u ∈ C2(ΩT ), ΩT = Ω× 〈 0, T 〉.Staticke rovnice doplnıme o vliv setrvacnych sil souvisejıcıch s casovou zmenou posuvu na zakladeD’Alembertova principu: za pohybu je teleso v rovnovaze, doplnıme-li staticke sıly silami se-trvacnymi.
Setrvacne sıly Fi,s vyjadrıme podle 2. Newtonova zakona (na jednotku objemu), pricemza(x, t) je zrychlenı a ρ = ρ(x, t) je hustota:
Fi,s = −ρa = −ρ∂2ui∂t2
.
Dynamicke rovnice rovnovahy pak podle (3.23) budou mıt tvar
∂τij∂xj
+ Fi = ρ∂2ui∂t2
. (3.29)
Lameovy dynamicke rovnice pro posuvy budou mıt rovnez na prave strane setrvacny clen,
(λ+ µ)∂2ui∂xi∂xj
+ µ)∂2ui∂x2
j
+ Fi = ρ∂2ui∂t2
, (3.30)
resp. ve vektorovem tvaru
(λ+ µ) grad divu+ µ∆u+ F = ρ∂2u
∂t2. (3.31)
PrıkladUkazeme dalsı tvar dynamickych rovnic, ktery dovoluje analyzovat elasticke vlny v tuhem telese,specielne naprıklad seismicke procesy. Vsimneme si nejprve rozmerove analyzy jednotlivych clenudynamicke rovnice. Protoze Fi je sıla na jednotku objemu, platı [Fi] = Nm−3, rozmer Lameovychkoeficientu je [λ, µ] = Nm−2. Vydelıme-li (3.31) hustotou ρ, muzeme zavest dve nove veliciny
cl =
√λ+ µ
ρ, ct =
õ
ρ,
ktere majı rozmer rychlosti ms−1. Upravena rovnice elastickych vln ma tvar
(c2l − c2
t ) grad divu+ c2t∆u+
1
ρF =
∂2u
∂t2,
kde cl je podelna (longitudinalnı) rychlost a ct prıcna (transverzalnı) rychlost vlny.
CvicenıAnalogiı Lameovych rovnic pro posuvy jsou tzv. Beltramiho–Michellovy rovnice pro napetı,v nichz figurujı elasticke moduly. Odvod’te jejich nejpouzıvanejsı specialnı prıpad, ktery obdrzımepro i = j:
∆θ +1 + σ
1− σdivF = 0 .

3.4. ROVNICE MECHANIKY KONTINUA 53
3.4.4 Okrajove podmınky v ulohach pruznosti
(A) Zakladnı staticke ulohyLameovy rovnice pro posuvy doplnujeme podmınkami na hranici Γ zadane oblasti. Hranicnıpodmınky zpravidla delıme na geometricke (pro posuvy) a staticke (pro napetı). Je-li ν =ν(P ) vektor normaly v libovolnem bode hranice, oznacıme ν0 jeho normovanou verzi.
(A1) Pri zadanı geometrickych podmınek predepisujeme posuvy na hranici prımo vektorovoufunkcı g, jedna se tedy o podmınky Dirichletova typu:
u(P ) = g(P ) ∀P ∈ Γ , (3.32)
nebo slozkove, ui = gi na Γ. V nekterych prıpadech mohou byt zadany posuvy pouze v normalovemu(n) ci tecnem smeru u(t), pricemz u(n) + u(t) = u. Predchozı podmınku lze pak snadno modi-fikovat, uvazıme-li, ze je
u(n)j = uiνiν0,j , u
(t)j = uj − uiνiν0,j . (3.33)
(A2) Statickymi podmınkami rozumıme situaci, kdy je na hranici zadan vektor napetı T Γ(P ):
T (P ) = T Γ(P ) ∀P ∈ Γ , tj. τij(P )νj(P ) = TΓ,i(P ) . (3.34)
Jelikoz resıme ulohu pro posuvy, je treba tuto podmınku prepsat s pouzitım Hookeova zakonaa vztahu mezi deformacemi a posuvy do odpovıdajıcı podoby:
λ∂uj∂xj
νi + µ
(∂ui∂xj
+∂uj∂xi
)νj = TΓ,i . (3.35)
Obdrzeli jsme tak zobecnene Neumannovy hranicnı podmınky. I v tomto prıpade muze bytzadanı formulovano pouze pro tecny ci normalovy smer, prepis podmınek je analogicky jakov prıpade (A1). Oba typy hranicnıch podmınek muzeme ilustrovat na smısene okrajove uloze
Γ3
Γ2
Γ1
Obrazek 3.6: Kontaktnı hranicnı podmınky.
dle obr. 3.6. Hranice Γ1, Γ3 jsou ”volne”, tedy bez pusobenı vnejsıch sil, muzeme na nich tudızzadat homogennı okrajove podmınky Neumannova typu:
T = o , tj. λ∂uj∂xj
νi + µ
(∂ui∂xj
+∂uj∂xi
)νj = 0 . (3.36)

54 KAPITOLA 3. APLIKACE TENZOROVEHO APARATU
Na hranici Γ2 je predpokladan kontakt s podlozkou, avsak bez trenı. Tuto skutecnost muzemevyjadrit dvema zpusoby. Jednak podmınka znamena nulove normalove posuvy,
u(n)i = 0 na Γ2 ,
soucasne musı byt nulova tecna napetı, nenastava-li trenı:
T(t)i = 0 na Γ2
s naslednym prepisem na relaci s posuvy.
(B) Pocatecnı podmınkyZadavame je pro dynamicke ulohy nejcasteji ve forme pocatecnıch stavu posuvu,
ui(M, 0) = ϕ(M) , M ∈ Ω (3.37)
a pocatecnıch rychlostı posuvu,
∂ui(M, 0)
∂t= ψ(M) , M ∈ Ω . (3.38)
Funkce musı byt dostatecne hladke, alespon ϕ, ψ ∈ C1(Ω).
3.4.5 Proudenı nestlacitelnych tekutin
Budeme hledat rovnice pro slozky rychlostnıho pole v = vi = dxi/dt proudıcı nestlacitelnetekutiny. V takovem prıpade je ρ = const., takze z rovnice kontinuity
∂ρ
∂t+∂(ρvi)
∂xi= 0
plyne∂vi∂xi
= 0 .
Nejprve vyjadrıme zrychlenı jako globalnı zmenu rychlosti v case totalnım diferencialem prvnıhoradu:
ai(x, t) =dvidt
=∂vi∂x1
dx1
dt+∂vi∂x2
dx2
dt+∂vi∂x3
dx3
dt+∂vi∂t
=∂vi∂xj
vj︸ ︷︷ ︸(I)
+∂vi∂t︸︷︷︸
(II)
, (3.39)
kde (I) je konvektivnı zrychlenı a (II) casova zmena rychlostnıho pole.Jestlize vydelıme dynamickou rovnici (3.29) hustotou ρ a na pravou stranu dosadıme za zrychlenız (3.39), obdrzıme zakladnı pohybovou rovnici nestlacitelnych tekutin
1
ρ
∂τij∂xj
+1
ρFi =
∂vi∂xj
vj +∂vi∂t
. (3.40)
Tvar tenzoru τij zavisı na tom, zda uvazujeme vnitrnı trenı neboli viskozitu tekutiny. Pro ulohubez vnitrnıho trenı je napetı dano pouze hydrostatickym tlakem, tj. τij = −p.δij . Obecna rovnicepak prejde v Eulerovu rovnici
−1
ρ
∂p
∂xi+
1
ρFi =
∂vi∂xj
vj +∂vi∂t
. (3.41)

3.5. KRYSTALOVE SOUSTAVY 55
Budeme-li uvazovat ulohu s vnitrnım trenım, tedy proudenı vazke tekutiny, musıme psat τij vobecnejsı forme
τij = −p.δij + σij .
Ukazeme, jak lze vyjadrit viskoznı clen σij . Nejprve rozlozıme totalnı derivaci ∂vi/∂xj na soucetsymetrickeho a antisymetrickeho tenzoru:
∂vi∂xj
=1
2
(∂vj∂xi
+∂vi∂xj
)+
1
2
(∂vj∂xi− ∂vi∂xj
)≈ 1
2
(∂vj∂xi
+∂vi∂xj
)= eij ,
kde jsme zanedbali druhy clen, ktery je velmi maly ve srovnanı s prvnım. Zıskana velicina eij senazyva tenzor rychlosti deformace a s jejı pomocı vyjadrıme σij jako analogii Hookeova zakona:
σij = λδij ekk + 2µeij .
Po dosazenı do (3.40) dostavame
1
ρ
[− ∂p
∂xi+ λδij
∂
∂xj
(∂vk∂xk
)+ µ
∂
∂xj
(∂vj∂xi
+∂vi∂xj
)]+
1
ρFi =
∂vi∂xj
vj +∂vi∂t
.
V hranate zavorce je prostrednı clen roven nule vzhledem k predpokladu nestlacitelnosti tekutiny,tentyz predpoklad vede ke zjednodusenı tretıho clenu. Zavedeme-li dale kinematickou viskozitu νvztahem
ν =µ
ρ,
obdrzıme jako vysledek Navierovy–Stokesovy rovnice nestlacitelne tekutiny :
−1
ρ
∂p
∂xi+ ν
∂2vi∂x2
j
+1
ρFi =
∂vi∂xj
vj +∂vi∂t
. (3.42)
3.5 Krystalove soustavy
Tenzorovy aparat lze s vyhodou pouzıt ke klasifikaci krystalovych soustav reprezentujıcıchruznou uroven prirozene anizotropie mineralu. Uprednostnıme optickou klasifikaci se tremi typyanizotropie 2. radu (anaxialnı, uniaxialnı a biaxialnı), ktere se v krystalografii dale specifikujı;tenzor T reprezentuje konkretnı anizotropii vzhledem k obvyklym osam kartezskeho souradnehosystemu:
1. anaxialnı (kubicka)
T =
T 0 00 T 00 0 T
2. uniaxialnı (tetragonalnı, hexagonalnı, trigonalnı)
T =
T1 0 00 T1 00 0 T3
3. biaxialnı

56 KAPITOLA 3. APLIKACE TENZOROVEHO APARATU
• ortorombicka
T =
T1 0 00 T2 00 0 T3
• monoklinicka
T =
T11 0 T13
0 T22 0T31 0 T33
• triklinicka
T =
T11 T12 T13
T21 T22 T23
T31 T32 T33
Natocenı krystalu (kolem pocatku souradneho systemu) se realizuje jako ortogonalnı transfor-mace s nejakou maticı R – viz kap. 1.2:
T = R>T R ; (3.43)
pozor, otacıme krystal, nikoli souradny system.PrıkladProved’te optickou klasifikaci krystalu, ktery ma v obecne poloze anizotropii popsanou tenzorem
S =
9√
3 0√3 11 0
0 0 8
.
Resenı.Na ulohu lze nahlızet z nekolika hledisek. Muzeme ho naprıklad interpretovat jako nalezenı ka-nonickeho tvaru kvadraticke formy. Pridrzıme se pojetı zalozeneho na ortogonalnı transformaci,s jejız pomocı otocıme krystal kolem pocatku tak, aby souradne osy splynuly s krystalovymi.Pujde tedy o transformaci popsanou rovnicı (3.43). S tenzorem S pracujeme stejne jako s maticı,a tedy prvnım krokem je urcenı ortogonalnı matice, ktera tenzor transformuje do zakladnı polohy.K tomu je treba obvyklym zpusobem vypocıtat vlastnı cısla vlastnı vektory. Charakteristickypolynom
|S− λI| =
∣∣∣∣∣∣∣9− λ
√3 0√
3 11− λ 00 0 8− λ
∣∣∣∣∣∣∣ = . . . = (λ− 8)2(12− λ)
polozıme roven nule a zıskame vlastnı cısla λ1 = 12 a λ2,3 = 8. Jim odpovıdajı vlastnı vektory
u1 = (1,√
3, 0), u2 = (−√
3, 1, 0), u3 = (1, 0, 0) .
Z jejich normovanych tvaru vytvorıme sloupce hledane matice transformace R:
R =
[u>1‖u1‖
,u>2‖u2‖
,u>3‖u3‖
]=
12 −
√3
2 0
√3
212 0
0 0 1
.
Snadno se lze presvedcit, ze tato matice je ortogonalnı, protoze R−1 = R>, jak bylo ukazanov kapitole 1. Jejı struktura navıc napovıda, ze pujde o otacenı kolem osy z neboli x3 o uhel

3.6. UMELA ANIZOTROPIE V OPTICE 57
ϕ = 60, nebot’ jeho kosinus je S11 = 1/2.Nynı muzeme pristoupit k transformaci puvodnı matice:
S′ =1
4
1√
3 0
−√
3 1 00 0 2
9
√3 0√
3 11 00 0 8
1 −
√3 0√
3 1 00 0 2
=
12 0 00 8 00 0 8
.
Vysledny diagonalnı tvar ukazuje, ze se jedna o uniaxialnı krystalovy typ.
3.6 Umela anizotropie v optice
Pusobenı vnejsıch vlivu (mechanicke namahanı, elektricke nebo magneticke pole aj.) na optickymaterial muze vyvolat anizotropii permitivity, prıpadne permeability. Sırenı optickeho svazkutakovym prostredım se projevuje modulacı vlastnostı incidentnıho elektromagnetickeho vlnenı.K typickym prıkladum patrı fotoelasticita, piezoelektricky jev, elektroopticky nebo magnetoop-ticky efekt.
3.6.1 Magnetoopticky jev
Je znamo, ze u feromagnetickych latek jako je zelezo, kobalt, nikl a dalsıch lze anizotropiiindukovat umele vnejsım magnetickym polem. V dusledku toho dochazı pri interakci opticke vlnys tımto prostredım k ovlivnenı jejıho polarizacnıho stavu. V odrazenem poli hovorıme o Kerrovejevu, pro transmitovanou vlnu se jedna o Faradayuv jev. Tyto efekty hrajı vyznamnou rolinaprıklad u optickych pamet’ovych mediı a v senzorice.Budeme uvazovat linearnı magnetoopticky efekt v homogennım krystalu s kubickou symetriı,jehoz permitivita je za neutralnıho stavu reprezentovana tenzorem
ε[0]ij = δijε0 . (3.44)
Vnejsı magneticke pole charakterizovane vektorem magnetizace M = (M1, M2, M3) indukujeanizotropii permitivity vyjadrenou tenzorem
ε = ε(M) = ε[0] + ε[1], (3.45)
kde
ε[1]ij = i ε0εijkQk , Qk = Q
Mk
Ms. (3.46)
(velicina Ms oznacuje hodnotu saturovane magnetizace). Vyslednou formuli pro tenzor permiti-vity lze pak psat ve tvaru
εij = ε0δij + iεijkQk . (3.47)
Predpokladejme sırenı dopadajıcı svetelne vlny v rovine x = 0 s kolmicı dopadu v ose z. Trojice’rovina dopadu – rovina rozhranı – vektor magnetizace’ jednoznacne urcuje charakter magneto-optickeho efektu. V praxi jsou obvykle vyuzıvany tri zakladnı typy magnetooptickych konfigu-racı, ktere klasifikujeme podle nasledujıcıho klıce:
(a) Polarnı konfigurace (M = (0, 0, M3), Q1 = Q2 = 0, Q3 = QP ):
ε = ε0
1 iQP 0−iQP 1 0
0 0 1
. (3.48)

58 KAPITOLA 3. APLIKACE TENZOROVEHO APARATU
(b) Longitudinalnı konfigurace (M = (0, M2, 0), Q1 = Q3 = 0, Q2 = QL):
ε = ε0
1 0 −iQL0 1 0
iQL 0 1
. (3.49)
(c) Transverzalnı konfigurace (M = (M1, 0, 0), Q2 = Q3 = 0, Q1 = QT ):
ε = ε0
1 0 00 1 iQT0 −iQT 1
. (3.50)
Cvicenı
V praxi je zpravidla QP ≈ QL ≈ QT ≈ Q. Pak tenzor relativnı permitivity feromagnetika pripolarnı magnetoopticke konfiguraci muzeme zapsat take ve tvaru
ε =
ε0 ε1 0−ε1 ε0 0
0 0 ε0
, (3.51)
kde ε1 = iQε0. Odvod’te jeho tvar pri otocenı vzorku o uhel α kolem osy x2. Overte, ze proα = π/2 obdrzıme transverzalnı konfiguraci.


















