Vector VII 104-561kVA User Manual 6.6.1
165
© 2008 Wood Group ESP, Inc. Vector ® VII Variable Speed Drive User’s Manual 104KVA – 561KVA Wood Group ESP, Inc. Wood Group ESP 5500 S.E. 59th Street Oklahoma City, OK 73135 Tel 405-670-1431 www.woodgroup-esp.com Part Number 196399 Revision 6.6.1 February 12, 2010
-
Upload
juliocanel2009 -
Category
Documents
-
view
193 -
download
11
Transcript of Vector VII 104-561kVA User Manual 6.6.1
-
2008 Wood Group ESP, Inc.
Vector VII Variable Speed Drive Users Manual 104KVA 561KVA
Wood Group ESP, Inc.
Wood Group ESP 5500 S.E. 59th Street Oklahoma City, OK 73135 Tel 405-670-1431 www.woodgroup-esp.com
Part Number 196399 Revision 6.6.1 February 12, 2010
-
2010 Wood Group ESP, Inc.
.
2
Intended Use This manual applies to the 104, 150, 253, 344, 428 and 561 models of the Wood Group ESP Vector VII Variable Speed Drive that are loaded with Firmware revision 6.6.
General Specifications
Electrical Specifications:
Rated Input Voltage: 480 Volt, 3 phase, 60 Hz (+ / - 10% of rated voltage and frequency). Consult factory for other input voltages and frequency ratings. Efficiency: 97% or greater at full load. Output Voltage: 0 Volts to rated input voltage Output Frequency: 0 Hertz to 120 Hertz.
Control Specifications:
Control Method: Sine coded output with optional VSG (Variable Sinewave Generation) technology. Accel / Decel: 0 Seconds to 6,000 seconds. Drive Overload: 110% of drive rating for 60 seconds (Variable Torque). Current Limit: Programmable current limit.
Control I/O:
Digital Inputs: 7 Programmable inputs - 24 VDC, 8 mA Sinking or Sourcing Logic. Digital Outputs: 2 Programmable dry contacts rated 250 VAC / 30 VDC @ 1A.
1 Fault contact - Form C dry contact rated 250 VAC / 30 VDC @ 1A. Analog Inputs: 2 Programmable inputs (10 bit). 1 Input 0 to +10 VDC 20 K Ohms 1 Input 0 to +10 VDC 20 K Ohms or 4 to 20 mA 250 Ohms Analog Outputs: 2 Programmable outputs (10 bit) 0 to +10 VDC 2 mA. Analog Reference: +15 VDC Source 20 mA. Logic Reference: +24 VDC Source 8 mA.
Environmental Specifications:
Ambient Service Temperature: 0C to 50C (32F to 1 22F) to -40C (-40F) with optional arctic package. Ambient Storage Temperature: -20C to 60C (-4F to 140F) Humidity: 0 to 100% Altitude: Up to 1000 Meters (3300 Feet) without de-rate. Vibration: 9.81m/s2 (1 G) maximum 10 to 20 Hz, 2.0 m/s2 (0.2 G) 20 Hz to 50 Hz.
Vector, VSG, SmartGuard and SmartLift are all registered trademarks of Wood Group ESP, Inc.
-
2010 Wood Group ESP, Inc.
.
3
Table of Contents: 1 Quick Start Guide.....................................................................................................................................7 2 I want to.. ...............................................................................................................................................8
2.1 Activate the normal drive screen.....................................................................................................8 2.2 Activate the status indicator screen ................................................................................................8 2.3 Adjust the frequency setpoint..........................................................................................................8 2.4 Clear the Fault state........................................................................................................................8 2.5 Determine the current rating of this drive........................................................................................8 2.6 Change one of the parameters in the Linear List............................................................................8 2.7 Save Data Log, Current Log, and Events files to USB Flash disk ..................................................8 2.8 Set drive parameters to their factory default values........................................................................8 2.9 Adjust the V/F behavior of the drive ................................................................................................8 2.10 Fine tune the drive output voltage without stopping the drive.........................................................9
3 Installation and Setup............................................................................................................................10 3.1 Site Installation ..............................................................................................................................10
3.1.1 Equipment Inspection 10 3.1.2 Equipment Installation and Requirements 10 3.1.3 Electrical Connections 13
3.2 Hardware Connections..................................................................................................................15 3.2.1 Control Terminals 15 3.2.2 External Stop Switches 20 3.2.3 Standby Switch Input 20 3.2.4 Event Switch 20 3.2.5 Remote Run and Reference 20
3.3 Startup Checks..............................................................................................................................21 3.3.1 Pre Power-Up 21 3.3.2 Pre Run Checks 21 3.3.3 Drive Start Up 22
3.4 Keypad Conventions .....................................................................................................................23 3.4.1 Soft keys 23 3.4.2 Arrow Keys 23 3.4.3 Start / Stop 24 3.4.4 Status Indicator Screen Old HMI 24 3.4.5 Status Indicator Screen New HMI 25
3.5 Configuration .................................................................................................................................25 3.5.1 Drive Mode 25 3.5.2 Frequency Behavior 26 3.5.3 Alarms and Restarts 26 3.5.4 Motor Direction 26
4 Screen Descriptions ..............................................................................................................................27 4.1 Run Status.....................................................................................................................................27 4.2 Event Log ......................................................................................................................................29 4.3 Select Screen (Not logged in) .......................................................................................................30 4.4 Enter Password .............................................................................................................................31 4.5 Select Screen (Logged in).............................................................................................................32 4.6 Fault Status ...................................................................................................................................34 4.7 Amp Chart .....................................................................................................................................35 4.8 Trending ........................................................................................................................................36 4.9 History Screen...............................................................................................................................37 4.10 Setup Screen.................................................................................................................................38 4.11
SmartGuard .................................................................................................................................40 4.12 Drive I/O ........................................................................................................................................41 4.13 Last Fault.......................................................................................................................................43 4.14 All Monitors....................................................................................................................................44 4.15 Run Info.........................................................................................................................................48
-
2010 Wood Group ESP, Inc.
.
4
4.16 Set Date and Time ........................................................................................................................49 4.17 Linear List Menu............................................................................................................................50
4.17.1 Linear List 51 4.18 Operating Mode ............................................................................................................................52
4.18.1 Selection Parameter Change 53 4.18.2 Operating Mode Frequency Control 54 4.18.3 Operating Mode - Analog Follower 56 4.18.4 Operating Mode Current Control 58 4.18.5 Operating Mode Pressure Control 60
4.19 Alarms Setup.................................................................................................................................62 4.20 Underload Setup ...........................................................................................................................64 4.21 Start Control ..................................................................................................................................66 4.22 Numeric Parameter Change .........................................................................................................68 4.23 Frequency Setup...........................................................................................................................69 4.24 Analog 1 Setup..............................................................................................................................71 4.25 Analog 2 Setup..............................................................................................................................73 4.26 Misc Setup.....................................................................................................................................75 4.27 Comm Setup .................................................................................................................................77 4.28 Hard Starting .................................................................................................................................79 4.29 Maintenance Menu........................................................................................................................80 4.30 Startup Control ..............................................................................................................................82 4.31 Keypad Test ..................................................................................................................................84
5 Parameter Locator .................................................................................................................................85 6 Remote User Interface ...........................................................................................................................87
6.1 What is the Remote User Interface?.............................................................................................87 6.2 Configuration .................................................................................................................................87 6.3 Capabilities....................................................................................................................................88
7 Volts per Hertz Settings (V/Hz) .............................................................................................................89 7.1 V/Hz Factory and Manual Set-up. .................................................................................................89
7.1.1 Factory Default V/Hz and Definition 89 7.1.2 Selectable 60 Hz V/Hz settings 90 7.1.3 Selectable 50 Hz V/Hz settings 93 7.1.4 V/Hz Manual Set-up 97
8 SCADA Interface ....................................................................................................................................98 8.1 SCADA Interface Port ...................................................................................................................98 8.2 SCADA Addresses........................................................................................................................98 8.3 Old HMI Communication Ports 1-5 Pin Out ................................................................................103 8.4 New HMI Communication Ports Pin Out.....................................................................................104
9 Troubleshooting and Maintenance ....................................................................................................105 9.1 Main Circuit Test Procedure........................................................................................................105
9.1.1 Test Point Designations 106 9.1.2 Main Power Circuit Test and Troubleshooting 106
9.2 Drive System Troubleshooting ....................................................................................................109 9.2.1 Drive Frame PC Board Designations 110 9.2.2 System Power Checks and Troubleshooting 110 9.2.3 Fan/Heat Exchanger Troubleshooting 111 9.2.4 Drive Status / Fault Codes 111
9.3 General Maintenance..................................................................................................................115 9.3.1 Periodic Inspection NO Power Applied 115 9.3.2 Periodic Inspection Power Applied (External Only) 115
Appendix........................................................................................................................................................116 1 Dimensions and Weights ....................................................................................................................116 2 Default Parameter Values....................................................................................................................119 3 USB Flash Drive Operation .................................................................................................................122
3.1 Save History files ........................................................................................................................122
-
2010 Wood Group ESP, Inc.
.
5
3.2 Save Configuration to USB flash drive........................................................................................122 3.3 Save Linear List to USB flash drive ............................................................................................123 3.4 Load configuration from a USB flash drive to a Vector VII drive ..............................................123
4 Linear List .............................................................................................................................................124 5 Tools Recommended for Maintenance and Repair ..........................................................................161 6 CE Conformity for drives purchased with CE Option ......................................................................162
6.1 Emergency Stop Function...........................................................................................................162
-
2010 Wood Group ESP, Inc.
.
6
General Precautions
DANGER: This drive unit requires and produces potentially lethal voltage levels. Failure to comply with the following may lead to equipment damage, serious personal injury and/or
death!!!
Read and understand this manual in its entirety before installing, operating, or servicing this drive. All warnings, cautions, notes and instructions must be followed. The drive must be installed by qualified personnel only. The drive must be installed following the guidelines in this manual and following all applicable local codes.
Do not connect or disconnect wiring while power is applied to the drive. Do not remove covers or touch any components while power is on.
To avoid the risk of potentially lethal electrical shock, remove and lock-out all incoming power before servicing this drive unit. The internal capacitors remain charged even after the power supply is turned off. To prevent electrical shock, wait at least five minutes after removing power and measure the DC bus voltage between the +3 and terminals to confirm safe level of voltage.
Do not bypass the internal circuit breakers of the drive for any reason. Verify that the rated voltage of the drive matches the voltage of the incoming power supply before applying power. Replace any protective covers or shields that may have been removed during servicing before operation of the drive. Do not connect or operate this unit with visible damage or missing/removed parts. This unit may start unexpectedly upon application of power. Clear all personnel from the drive and other connected
equipment. Secure and/or remove any mechanical hazards that may be present with the application of power to this drive This drive contains ESD (ElectroStatic Discharge) sensitive parts and assemblies. Static control precautions are required
when installing, testing, or servicing this unit.
Arc Flash Warning: There is a potential for Arc Flash Hazard with this equipment. It is strongly recommended that an analysis of incident energy levels and determination of appropriate Personal Protective Equipment be conducted prior to energizing this equipment.
Danger Warning: A Danger warning symbol is an exclamation mark enclosed in a triangle that precedes the word DANGER. A Danger warning symbol indicates a hazardous situation which, if not avoided, will result in Death or serious injury. Danger warnings in this manual appear in the following manner.
DANGER Special instructions and descriptions of the associated hazard will be explained in the text following the Danger warning.
Or for CE marked Applications:
Electrical Warning: The electrical warning symbol is a lightning bolt mark enclosed in a triangle. The electrical warning symbol is used to indicate locations where hazardous voltage levels are present and conditions may cause serious injury if proper precautions are not followed. .
Or for CE marked Applications:
Caution Warning: A Caution warning symbol is and exclamation mark enclosed in a triangle that precedes the word CAUTION. A Caution warning symbol indicates a hazardous situation which, if not avoided, will result in minor or moderate injury.
Or for CE marked Applications:
-
2010 Wood Group ESP, Inc.
.
7
1 Quick Start Guide This section will guide you through drive configuration for a typical ESP installation. It is highly recommended that the user read the entire manual before proceeding with this procedure!
Step Name Description 1 Log on to access drive
configuration
Sections 4.3, 4.4
From the Run Status screen, press the Menu soft key Use the up and down arrow buttons to select Log In, press the OK soft key. Enter the password and press the OK soft key. Default password is 3333.
2 Set Auto Restart and Drive Lockout function
Section 4.30
From the Run Status screen, press the Menu soft key From the Select Screen, press the Startup soft key Set Auto Restart to Enable or Disable (Application Dependent) Set Drive Lockout to Unlock before starting the drive
3 Set drive mode and related parameters
Sections 3.6.1, 4.18
Determine the operating mode for the drive - Current Control, Pressure Control, Frequency Control, and Analog Follower.
Edit the Drive Mode parameter in the Operating Mode screen as needed. Modify the other parameters in the Operating Mode screen as necessary.
Use the up and down arrow buttons in the Select Screen to select the Operating Mode screen, press the OK button.
Use the up and down arrow buttons to select a parameter, press the Edit key to change the selected parameter.
4 Set up alarms
Section 4.19, 4.20
Set the motor overload and global restart parameters in the Alarms Setup screen. Set the motor Underload and Underload restart parameters in the Underload Setup
screen. Select the screen and select / edit parameters as in step 3.
5 Set up frequency behavior
Section 4.23
Set the V/F curve, motor direction, maximum and minimum frequencies, acceleration and deceleration times, jog setpoint, and lockout frequencies in the Frequency Setup screen.
Select the screen and select / edit parameters as in step 3.
6 Set up Misc parameters
Section 4.26
Configure the SmartGuard sensor (if available), transformer ratio, customer password, and faults as necessary in the Misc Setup screen.
Select the screen and select / edit parameters as in step 3.
7 Configure analog inputs
Section 4.24, 4.25
If required. Use the Analog 1 Setup and Analog 2 Setup screens. Select the screen and select / edit parameters as in step 3.
8 Configure User Selected Parameters
Section 4.10
Select parameters to display in the User Selected Parameters section of the Run Status screen using the Setup screen.
Select the screen and select / edit parameters as in step 3.
-
2010 Wood Group ESP, Inc.
.
8
2 I want to.. 2.1 Activate the normal drive screen
Press any key. Do NOT press the STOP key unless you want the drive to stop. Refer to Section 3.5.4.
2.2 Activate the status indicator screen The status indicator screen is displayed automatically after 5 minutes of keypad inactivity. It can not be activated manually.
2.3 Adjust the frequency setpoint Press the Setp soft key on the Run Status screen to activate setpoint change mode. Use the up and down arrow keys to adjust the setpoint as desired. Refer to Section 4.1
2.4 Clear the Fault state Press the STOP key to attempt to clear the fault state. Some faults require a full power cycle to reset.
2.5 Determine the current rating of this drive Examine the Drive Max Amps parameter displayed on the All Monitors screen. Refer to Section 4.14
2.6 Change one of the parameters in the Linear List Please discuss this with Engineering. Some of these values are changed automatically when the higher level parameters are changed via the setup screens. Therefore, changes to the parameters in the Linear List must be considered carefully to avoid unexpected results. Refer to Section 4.17
2.7 Save Data Log, Current Log, and Events files to USB Flash disk
See description of the Save soft key in the History screen. Refer to Section 4.9 and Appendix 3
2.8 Set drive parameters to their factory default values Select the Set all parameters to factory defaults. function in Maintenance screen. Note that this function sets both the high level user interface parameters and low level drive parameters to their factory defaults. This function may take several seconds. The drive must be powered off and then back on after this function has completed prior to further drive configuration or use. Refer to Section 4.29
2.9 Adjust the V/F behavior of the drive The high level parameter V/F Select in the Frequency Menu allows selection from several standard V/F curves (60 Hz Standard Torque, 60 Hz Medium Torque, 60 Hz High Torque, 50 Hz Standard Torque, 50 Hz Medium Torque, 50 Hz High Torque). Using this selection, along with the Maximum Frequency, should accommodate many, if not all, ESP installations. The V/F behavior
-
2010 Wood Group ESP, Inc.
.
9
can be customized if necessary please contact the WG ESP controls group at Oklahoma City for advice if such customization is necessary. Refer to sections 4.23 and 7.
2.10 Fine tune the drive output voltage without stopping the drive Adjust the Voltage Bias parameter in the Frequency Setup screen. Note that the Voltage Bias is applied if the drive is running a maximum frequency. At lower frequencies, the voltage bias is scaled. Also note that the output voltage is limited by the DC bus voltage. Refer to section 4.23.
-
2010 Wood Group ESP, Inc.
.
10
3 Installation and Setup 3.1 Site Installation
3.1.1 Equipment Inspection Upon receiving equipment a thorough inspection for external and internal damage should be conducted before connecting and operating. Check the external enclosure for broken welds, hinges, bent corners, doors or bent legs. Check the internal enclosure for loose or broken hardware such as fans, covers or
fasteners. Inspect all wire terminations to ensure connections are tight. Inspect the enclosure for any signs of water leakage into the drive. NOTE!!! If the drive is to be used in an ESP application, make sure that the unit is
connected to an output filter (either internal or an external). NOTE!!! Multi-pulse units require a properly sized and configured phase shift
transformer.
3.1.2 Equipment Installation and Requirements Equipment Placement The main power service should be located no closer than 100' (30m) from the
wellhead. The drive should be placed at least 50' (15m) from the wellhead, to prevent exposure to
hazardous and explosive gasses, and provide adequate access for well work over equipment.
The drive should be placed on a flat level surface; a concrete pad is recommended but not required, The VSD should be fastened to the pad through the mounting holes in the enclosure legs. Only use mounting hardware designed for use with the pad material.
A minimum of 6 of space should be maintained on all four sides of the drive. This will ensure correct airflow across cooling heat sinks and fan intakes, as well as provide easy access for servicing and cable entry.
Service Requirements Main service amperage is based on drive KVA and motor load calculations. A service disconnect is required between the service transformers and the drive. This
should be sized to accommodate service amperage. Overhead service drops into disconnects or other equipment must be equipped with a
mast mounted weather head to prevent rain from entering equipment.
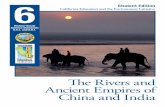
Grounding and Bonding DANGER Correct system grounding and equipment bonding is required to ensure proper operation of equipment during both normal operation and fault conditions. Grounding and bonding conductors provide a path to ground for lethal fault currents and voltages. Failure to correctly ground and bond equipment can lead to equipment damage and personnel injury or death. Refer to Figure 3.1 and 3.2.
Grounding applies to the main service connection to ground. Service transformer wye-point and enclosures, including the service disconnect switch, must be connected to a common ground conductor and grounding electrodes. (Refer to local electrical authority for approved grounding electrodes and methods in you area) System ground resistance should not exceed 25 Ohms to ground and ideally be between 1-5 Ohms to ground.
-
2010 Wood Group ESP, Inc.
.
11
Ground resistance checks should only be made by qualified electrical inspection agencies.
Bonding applies to all other electrical equipment and raceways. A bonding conductor must be connected from the main grounding electrodes to all enclosures, junction boxes, buildings, electrical pipes, and the wellhead.
This equipment provides an internal ground connection for the bonding conductor. This connector is connected to the internal ground bus of the enclosure.
Figure 3.1 Typical Drive Site (Line Power) Installation Grounding and Bonding
Generator requirements Generator supplied power systems have the same requirements for grounding and
bonding as utility supplied systems. Grounding electrodes must be installed and a common bonding conductor connected to all equipment and buildings.
Use of generators on drives creates other possible operational problems that can be reduced with correct generator sizing and design. Generators must be designed to handle the sub-transient reactance present on VSD applications. When the generator system does not incorporate a wye-point for connection to the system ground, then an isolation transformer is required between the generator and input to the VSD. This provides some protection from floating voltages, and provides a wye-point for connection to the ground system.
Failure to follow the above guidelines will result in poor performance and/or equipment failure.
When a generator unit is used for drive input power, it is highly recommended to use a multi-pulse VSD (12 Pulse or higher) or the generator should be sized to at least 300% of the VSD rating.
-
2010 Wood Group ESP, Inc.
.
12
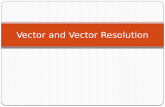
Figure 3.2 Typical Drive Site (Generator Power) Installation Grounding and Bonding
-
2010 Wood Group ESP, Inc.
.
13
3.1.3 Electrical Connections Main Circuit Terminal Configuration Input power is applied to the drive circuit breaker MCCB1 terminals L1, L2, L3 (and
MCCB2 L11, L21, L31 terminals in 12 Pulse units). Refer to Figures 3.3 and 3.4 for reference Output power connections are made at the output power block terminals T1, T2, T3. Applicable wire sizes give in Table 3.2
VECTOR VII 6,12 Pulse Input Lug Sizes / Output Lug Sizes / Ground Lug Sizes
Output Lug Size / Phase
Drive Model Input Lug Size 6 Pulse / Phase
Input Lug size 12 Pulse / Phase PWM VSG
Ground Lug Size
150 (1X) #4 - 350 MCM (1X) #6 - 3/0 (2X) #6 - 350MCM (2X) #6 - 250MCM #14 - 2/0
(1X) 25mm2 - 165mm2 (1X) 16mm2 - 95mm2 (2X) 16mm2 - 165mm2 16mm2 - 120mm2 2.5mm2 - 70mm2 253 (2X) 250MCM - 750MCM (1X) #4 - 350MCM (2X) #6 - 350MCM (2X) #6 - 250MCM #14 - 2/0
(2X) 120mm2 - 400mm2 (1X) 25 - 165mm2 (2X) 16mm2 - 165mm2 16mm2 - 120mm2 2.5mm2 - 70mm2 344 (2X) 2/0 - 600MCM (1X) 2/0 - 600 MCM (2X) #2 - 600MCM (2X) 1/0 - 750MCM #6 - 350MCM
(2X) 70mm2 - 300mm2 (1X) 70mm2 - 300mm2 (2X) 35mm2 - 300mm2 (2X) 55mm2 - 400mm2 16mm2 - 165mm2
428 (2X) 2/0 - 600MCM (1X) 3/0 - 600MCM (2X) #2 - 600MCM (2X) 1/0 - 750MCM #6 - 350MCM
(2X) 70mm2 - 300mm2 (1X) 95mm2 - 300mm2 (2X) 35mm2 - 300mm2 (2X) 55mm2 - 400mm2 16mm2 - 165mm2
561 (2X) 500MCM - 750MCM (1X) 250MCM -
750MCM (2X) #2 - 600MCM (2X) 1/0 - 750MCM #6 - 350MCM
(2X) 240mm2 - 400mm2 (1X) 150mm2 - 400mm2 (2X) 35mm2 - 300mm2 (2X) 55mm2 - 400mm2 16mm2 - 165mm2
Table 3.1 Applicable Lug Sizes for Main Circuit Terminals
-
2010 Wood Group ESP, Inc.
.
14
VECTOR VII RECOMMENDED CABLE SIZE
Input Conductor 6 Pulse / Phase Input Conductor 12 Pulse / Phase Output Conductor / Phase
Drive Model L1 L2 L3 Size* (AWG kcmil) L1 L2 L3 L11 L21 L31 Size* (AWG kcmil) T1 T2 T3 Size* (AWG kcmil)
Cable Temperature Rating and Type
Cable Temperature Rating and Type Cable Temperature Rating and Type
60 C 75 C 60 C 75 C 60 C 75 C
(140F) (167F) (140F) (167F) (140F) (167F)
TYPE TYPE TYPE TYPE TYPE TYPE
TW, RHW, TW, RHW, TW, RHW,
UF THHW, UF THHW, UF THHW,
THW, THW, THW,
THWN, THWN, THWN,
XHHW, XHHW XHHW
USE,
ZW
Input Rating = 180 Amps Input Rating = 180 Amps Output Rating = 180 Amps
150 300mcm 3/0awg 2awg 3awg (2X) 1awg (2X) 2awg
150mm 95mm 35mm 30mm (2X) 50mm (2X) 35mm
Input Rating = 304 Amps Input Rating = 304 Amps Output Rating = 304 Amps
(2X) 3/0mcm (2X) 2/0awg 3/0awg 2/0awg (2X) 3/0awg (2X) 2/0awg
253
(2X) 95mm (2X) 70mm 95mm 70mm (2X) 95mm (2X) 70mm
Input Rating = 414 Amps Input Rating = 414 Amps Output Rating = 414 Amps
(2X) 300mcm (2X) 4/0awg 300mcm 4/0awg (2X) 300mcm (2X) 4/0awg
344
(2X) 150mm (2X) 120mm 150 mm 120mm (2X) 150mm (2X) 120mm
Input Rating = 515 Amps Input Rating = 515 Amps Output Rating = 515 Amps
(2X) 400mcm (2X) 350mcm 400MCM 350MCM (2X) 400mcm (2X) 350mcm
428
(2X) 240mm (2X) 165mm 240 mm 165 mm (2X) 240mm (2X) 165mm
Input Rating = 675 Amps Input Rating = 675 Amps Output Rating = 675 Amps
(2x) 600mcm (2X) 500mcm 600mcm 500mcm (2x) 600mcm (2X) 500mcm
561
300 mm (2X) 240mm 300 mm 240mm 300 mm (2X) 240mm
Table 3.2 Recommended Cable Sizes
* Copper conductors, not more than 3 insulated conductors rated 0-2000 volts in raceway or cable. Ambient temperature of 30C (86F).
* Table 3.2 Recommended cable sizes are calculated to be sized 125% of Input/Output current rating.
-
2010 Wood Group ESP, Inc.
.
15
Figure 3.3 6 Pulse Main Circuit Terminal Configuration
Figure 3.4 12 Pulse Main Circuit Terminal Configuration
3.2 Hardware Connections 3.2.1 Control Terminals
Identifying Control Terminals Digital and Analog I/O are supported through the control terminals. The Control Terminals (located on the Terminal Card) are mounted on the lower section of the drive chassis. The picture below shows the control terminals.
-
2010 Wood Group ESP, Inc.
.
16
Figure 3.5 Control Terminal Wire Sizes
Terminal Possible Wire Sizes AWG (1 Amp Max) Recommended Wire Size AWG ALL ( Except E(G) ) Stranded wire: 26 - 16 18 E(G) 20 - 14 14
Terminal Designations: Refer to Figure 3.6 and 3.7 for control terminal and HMI terminal diagram.
Digital Inputs
Terminal Signal Description Signal Level S1 Remote Run Forward Run when CLOSED, stopped when OPEN 24VDC, 8mA S2 Not Used - - S3 External Fault 1 Fault When OPEN (Programmable) 24VDC, 8mA S4 External Fault 2 Fault When OPEN (Programmable) 24VDC, 8mA S5 Standby Standby when OPEN (Programmable) 24VDC, 8mA S6 Spare Programmable 24VDC, 8mA S7 Breaker 2 Fault Fault When OPEN (Programmable) 24VDC, 8mA SN Signal Common - - SC Seq Common Must be tied to SP - SP Signal Power Digital input supply +24 VDC, -
Analog Inputs
Terminal Signal Description Signal Level +V +15VDC Output +15VDC for analog Inputs or Transmitters 20 mA Max A1 Analog In 1 Analog Input or Speed Command 0-10VDC A2 Analog In 2 Multi Function Analog Input 4/20mA, 0-10VDC AC Analog Common - - E(G) Shield Wire Optional Ground Line Connection Point -
Digital Outputs Output Contact Ratings 1Amp Max at 250VAC
Terminal Signal Description Signal Level M1 M2
Drive Running NC Contact
CLOSED while drive is running. (Multi Function Digital Input, Programmable)
Dry Contact
M3 M4
Remote/Auto NO Contact
Closed when in Local. (Multi Function Digital Input, Programmable)
Dry Contact
MA MB MC
Drive Fault Output
MA/MC CLOSED during Fault condition MB/MC OPEN during Fault condition
Dry Contact
-
2010 Wood Group ESP, Inc.
.
17
Analog Outputs
Terminal Signal Description Signal Level FM Multi-Function
Analog Output Programmable - Output Frequency Default 0-10 VDC, 2mA Max
AC Analog common - - AM Multi-Function
Analog Output Programmable - Output Current Default 0-10 VDC, 2mA Max
-
2010 Wood Group ESP, Inc.
.
18
+V
A1
A2
AC
+15 VDC
Analog Input 1 0-10 Vdc
Analog Input 2 0-10 Vdc or 4-20 mA
Analog Inputs
FM
AM
AC
Frequency Output 0-10 VDC
Current Output 0-10 VDC
Analog Common
Analog Outputs
EG
R+
R-
S+
S-
IG1
9
9
1
8
3
9
1
1
9
COM5
COM4
COM3
COM2
COM1
HMI
RTU/SSU
RESERVED
MODBUS SLAVE
RESERVED/DEBUG
1 2
+5V GND
EXTERNAL USB PORT
S+
S-
* 12 Pulse Drives Only
Analog Common
[CJ]
Digital Inputs
S1
S2
S3
S4
S5
S6
S7
SN
SC
SP
Remote Run
Not Used
External Fault 1
External Fault 2
Lease Kill
Spare
Breaker 2 Fault
Signal Common
+24 VDC
MA
MB
MC
M1
M2
M3
M4
Digital Outputs
Drive Fault
Remote\Auto
Drive RunningSEQ Common
[CK]
DIP Switch S1
S1-1 RS485/422 Terminating resistance
OFF No Termination Resistance
ON Termination Resistance of 110 Ohms
Default - OFF
OFF 0-10 Vdc
ON 4-20 mA
Default ON (4-20 mA)
S1-2 Analog Input A2 Setup
OFF ON1
2
EG EG
3
1
CN88[PK]
[PJ]To
fan
Relay
Figure 3.6 Control Terminals and OLD BLUE BOX HMI Terminal Diagram
-
2010 Wood Group ESP, Inc.
.
19
+V
A1
A2
AC
+15 VDC
Analog Input 1 0-10 Vdc
Analog Input 2 0-10 Vdc or 4-20 mA
Analog Inputs
FM
AM
AC
Frequency Output 0-10 VDC
Current Output 0-10 VDC
Analog Common
Analog Outputs
EG
R+
R-
S+
S-
IG
* 12 Pulse Drives Only
Analog Common
[CJ]
Digital Inputs
S1
S2
S3
S4
S5
S6
S7
SN
SC
SP
Remote Run
Not Used
External Fault 1
External Fault 2
Lease Kill
Spare
Breaker 2 Fault
Signal Common
+24 VDC
MA
MB
MC
M1
M2
M3
M4
Digital Outputs
Drive Fault
Remote\Auto
Drive RunningSEQ Common
[CK]
DIP Switch S1
S1-1 RS485/422 Terminating resistance
OFF No Termination Resistance
ON Termination Resistance of 110 Ohms
Default - OFF
OFF 0-10 Vdc
ON 4-20 mA
Default ON (4-20 mA)
S1-2 Analog Input A2 Setup
OFF ON1
2
EG EG
3
1
CN88[PK]
[PJ]To
fan
Relay
New HMI
1
2
3
4
J14 Comm 4
S-
S+
Figure 3.7 Control Terminals and New HMI Terminal Diagram
-
2010 Wood Group ESP, Inc.
.
20
3.2.2 External Stop Switches The drive supports up to two external stop switches. When a stop switch is activated, an external fault occurs and the drive stops.
Connecting an External Stop Switch 1: 1. Wire a stop switch between S3 and SN. 2. Enable External Fault 1 on the Misc Setup screen as Normally Open (N.O.) or
Normally Closed (N.C.).
Connecting an External Stop Switch 2: 1. Wire a stop switch between S4 and SN. 2. Enable External Fault 2 on the Misc Setup screen as Normally Open (N.O.) or
Normally Closed (N.C.).
3.2.3 Standby Switch Input The drive supports a normally closed external switch that will stop the drive when the switch opens. This can be used to stop the drive in a tank full or lease kill situation. If the Standby switch opens when the drive is running, the drive stops and enters the STANDBY state. An event is created but no fault occurs. The drive will immediately restart when the switch is closed again.
Connecting the Standby Relay: 1. Wire the normally closed terminals of the standby relay between S5 and SN. 2. Enable the Standby Switch parameter on the Misc Setup screen.
3.2.4 Event Switch The drive supports a switch that logs events when the switch changes states. No fault occurs and the drive does not stop.
Connecting the drive to an event switch. 1. Wire the switch to be monitored between S6 and SN.
3.2.5 Remote Run and Reference The drive supports a 2-wire external run interface along with an analog signal for drive speed control.
DANGER When operating in 2-wire mode the drive may start automatically upon power up of the unit. Ensure that the Remote Run input is OPEN before powering up a drive set up in 2-wire mode
To connect the drive to a remote run control and reference (Refer to figure 3.8): 1. Install a Normally Open relay contact between S1 and SN. 2. Connect the 0V 10V analog reference signal to terminal block position A1. 3. Connect analog ground to terminal block position AC.
The drive will run when S1 is pulled to the SN state (i.e. contactor or switch is closed).
-
2010 Wood Group ESP, Inc.
.
21
Figure 3.8 Remote Run Operation
3.3 Startup Checks
DANGER The following steps require that the system be energized. Only qualified personnel should perform the following procedures.
3.3.1 Pre Power-Up Remove and lock-out incoming power out before connecting the drive. Ensure that the drive is properly grounded. Do a complete visual inspection, checking for loose or broken wires. Make sure all internal and external fans are free to turn. Perform Main Circuit testing procedure outlined in Section 9.1. Connect the service power to the main input circuit breaker of the drive (L1, L2, L3 on 6
Pulse drives (and L11, L21, L31 on 12 Pulse drives)). !!!! Note connecting the input power to the output of the drive can cause severe damage to the drive.
Ensure that the output of the drive is disconnected (T1, T2, T3). Ensure that main drive circuit breaker(s) switch is in the Off position and all remote start signals that may be present are defeated.
Turn power on at the service disconnect and measure incoming voltage. Check the voltage phase to phase and phase to ground and ensure that the voltages are in range before closing drives circuit breaker. The phase to phase voltage should be 480VAC +/-10% and the phase to ground should be approximately 277VAC +/-10%.
3.3.2 Pre Run Checks
DANGER The following steps require that the system be energized. Only qualified personnel should perform the following procedures.
Drive Power Up Energize main input circuit breaker(s) and verify that the HMI powers up with no fault
conditions present. Check the DC Bus level. Measure across +3 and - terminals. Nominal values should be
between 650 700 VDC. In most cases it is wise to reset the drive to its factory default parameter settings before
-
2010 Wood Group ESP, Inc.
.
22
commissioning the drive. This should always be done when a drive has been used on a previous application. See Section 4.29 Set All Parameters To Factory Defaults.
Proceed with no-load checks
No-Load Checks No load checks should be performed to ensure proper operation of the drive before connecting the output of the drive to its load (Step-up Transformer or Motor). Proceed with the following steps.
Make sure that the drive output connections are disconnected. If they are not, ensure that the incoming power is locked out. Wait at least five minutes after removing power and measure the DC bus voltage to confirm safe level of voltage using volt meter set to read DC volts with the black lead connected to (-) and the red lead connected to (+3). Disconnect the drive output connections.
From the Run Status screen, use the Setp soft key and the down arrow key to adjust the frequency reference to the minimum frequency.
Navigate to the Underload Setup screen and set the Underload Current to 0. Set parameter L8-07 in the linear list to 0 (disabled), this will avoid nuisance LF
Missing Output Phase Faults. Press the Start button. Navigate to the Run Status screen. Check the output voltage. Use the Setp soft key
and the up arrow key to adjust the frequency reference to the maximum frequency. Check the output voltage. Output voltage should be equal to the incoming voltage at maximum frequency and approximately half of that value at minimum frequency (depending on setup of Voltage/Frequency).
Press the Stop button. Set parameter L8-07 in the linear list back to 1 (enabled). De-energize the main input circuit breaker and verify the HMI is no longer powered
up. Wait at least five minutes after removing power and measure the DC bus voltage
between the +3 and terminals to confirm safe voltage level. Lock-out incoming power. Re-connect the motor or Transformer leads to output terminal block T1, T2, T3. Make
sure that the drive output connections are tightly connected before continuing to next step.
3.3.3 Drive Start Up Once the drive has been set up and checked without the load connected, the drive is ready for startup. Proceed with the following steps.
Navigate to the Underload Setup screen and set the Underload Current to the desired value.
From the Run Status screen, use the Setp soft key and the up / down arrow keys to set the frequency reference to the desired operating frequency.
Press the Start button on the HMI. With the drive running, check the output voltage and output current to ensure that they
are within the limits of the given application. If any faults are present refer to Section 9 for troubleshooting.
-
2010 Wood Group ESP, Inc.
.
23
3.4 Keypad Conventions
START STOP
F5F4F3F2F1
USB Port
START STOP
F5F4F3F2F1
USB Port
196783
Figure 3.9 Old Blue Box HMI Keypad Figure 3.10 New HMI Keypad
3.4.1 Soft keys The 5 soft keys are located just below the LCD display and are labeled F1 through F5. The function of a soft key is defined by the label in the rectangle on the LCD display just above the key. The function of a soft key varies with the active screen.
3.4.2 Arrow Keys The arrow keys are screen dependent but the following rules apply Left and Right Arrows: If a graph or a chart is displayed, re-draws the chart using older (left arrow) or newer
(right arrow) data. In the Linear List, displays the previous (left arrow) or next (right arrow) set of Linear List
parameters. In the Enter Password and Date / Time screens, selects the field to the left (left arrow) or
the right (right arrow) of the currently selected field.
Up and Down Arrows: In the Run Status screen with the Setp soft key active, the up and down arrows adjust
the set point up (up arrow) and down (down arrow). The set point applies in the Current Control, Pressure Control, and Frequency Control modes.
In screens where lists of parameters are displayed, moves the selection to the parameter above (up arrow) or below (down arrow) the currently selected parameter.
-
2010 Wood Group ESP, Inc.
.
24
In the Numeric Parameter Entry screen, the Password Entry screen, and the Date / Time Entry screen adjusts the selected (highlighted) value up (up arrow) or down (down arrow).
3.4.3 Start / Stop The Start and Stop buttons work from all screens. Start will only start the drive if it is in the Ready state. Stop has priority over any other key.
3.4.4 Status Indicator Screen Old HMI The screen will change to display drive state information that can be seen from a distance whenever the keypad is inactive for 5 minutes. Pressing any key will return the user interface to its normal state. NOTE: Pressing the Stop key at any time whether the screen is in the normal or status indication mode will stop the drive!
Drive status indicators are as follows: Flashing Red Drive stopped in Fault state. Red Drive stopped in Ready state. Amber Drive stopped in Restart state. Drive will automatically restart but
the time to restart is greater than 1 minute. Flashing Amber Drive stopped in Restart or Standby state. Drive will automatically
restart. If in Restart state, the drive will restart in less than 1 minute. If in Standby state, the drive will restart immediately whenever the standby switch closes.
Green Drive running. Flashing Green Drive running in Alarm state.
-
2010 Wood Group ESP, Inc.
.
25
3.4.5 Status Indicator Screen New HMI There are three high intensity LEDs located just above the screen. These correspond with the following indications as the Old HMI screens.
LED Indicators Drive State Stop (Red) Fault (Amber) Run (Green)
Fault On On Off Ready On Off Off Restart (more than 1 minute) On Flash Off Restart (less than 1 minute) Standby
Flash Flash Off
Running Off Off On Running in Alarm Off Flash On
3.5 Configuration 3.5.1 Drive Mode
Note: Refer to Section 3.3.1 for locations of control terminal block connections.
1. From the Run Status screen, select the Menu soft key and then select Log In. Enter the password and select the OK soft key. (refer to Section 4.3 and 4.4 for log in information)
2. Select the Operating Mode screen and select the OK soft key. 3. Select the Drive Mode parameter and press the Edit soft key. 4. Select the desired Drive Mode.
i. Frequency Control Drive output frequency matches Frequency Setpoint. ii. Analog Follower Drive speed follows the value of the analog signal (0 10V)
connected to terminal block connection A1. Note that this mode requires additional wiring.
1. Wire the analog input signal (0 10V) to A1 and common to AC iii. Current Control In this mode the drive frequency is adjusted to maintain a
desired output current. This mode is often used with gassy wells. As the pump encounters gas pockets, the drive current decreases. The drive speeds up and the gas bubbles are cleared from the system.
iv. Pressure Control In this mode the drive frequency is adjusted to maintain a desired intake or exhaust pressure. Note: This mode requires additional wiring.
1. Wire the pressure sensor signal (0 10V, 4 20mA) to A2 and common to AC.
5. Press the OK soft key to accept the change. Note: The user interface displays the Select screen if the drive mode has been changed.
6. Select the Operating Mode screen and press the OK soft key. 7. Select and edit any other parameters associated with the selected drive mode.
-
2010 Wood Group ESP, Inc.
.
26
3.5.2 Frequency Behavior 1. From the Run Status screen, select the Menu soft key. If the Not
Logged In Select screen appears, then select Log In, enter the password, and select the OK soft key.
2. Select the Frequency Setup screen and select the OK soft key.
3. Select and modify the frequency parameters as desired.
3.5.3 Alarms and Restarts 1. From the Run Status screen, select the Menu soft key. If the Not Logged In Select screen appears, then select Log In, enter the password, and select the OK soft key. 3. Select the Alarms Setup screen and select the OK soft key. 4. Select and modify the alarms and restart parameters as desired. 5. Select the Menu soft key and then select the Underload Setup screen. 6. Select and modify the Underload parameters as desired.
3.5.4 Motor Direction From the Run Status screen, select the Menu soft key. If the Not Logged In Select screen appears, then select Log In, enter the password, and select the OK soft key. Select the Frequency Setup screen and select the OK soft key.
Select the Motor Direction parameter and modify as desired. Note that motor direction changes CAN be implemented without stopping the drive. Set the direction as desired. Once the change has been made, press the Start button. Drive will perform a controlled frequency ramp through 0 Hz to the setpoint frequency in the specified motor direction.
-
2010 Wood Group ESP, Inc.
.
27
4 Screen Descriptions 4.1 Run Status
Function: The Run Status screen is the default screen when the drive is powered up. It displays all data needed to assess the up-to-date state of the drive.
Field Descriptions: Screen Name: Run Status. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. Possible values
include Not Ready, Ready, Accelerating, Decelerating, Running, Ready Rem(ote), Start Rem(ote), Run Remote, Stop Rem(ote), Forced Stop, Fault, Restart (or RST time to restart), DRIVE OFF, Standby, Standby Remote.
Drive Serial Number: Serial number of the drive. Drive Mode: Frequency Control. Designates the control mode of the drive. The mode can be
changed in the Operating Mode screen. Date / Time: Date and time (mm/dd/yyyy hh:mm:ss) Frequency Setpoint: 65.00 Hz. The up-to-date frequency setpoint. This field will not be
present in some drive control modes. Output Current: 0.0 A. The up-to-date drive output current. Output Frequency: 0.00 Hz. The up-to-date frequency being emitted by the drive. Output Voltage: 0.0 V. The up-to-date voltage being emitted by the drive. Motor Direction Indicator: If the motor is running forward (or set to run forward if drive is
currently stopped), the direction indicator will show a clockwise semi-circle arrow with an F adornment. If the drive is running in reverse (or set to run in reverse if the drive is currently stopped), the direction indicator will show a counter-clockwise semi-circle arrow with an R adornment.
User Selected Parameters: Intake Press, Intake Temp, Motor Temp, Discharge Press, Analog A1. Up to 5 user selected parameters may be displayed on the run status screen. See the Setup screen for selecting these parameters.
-
2010 Wood Group ESP, Inc.
.
28
Graph: Output Frequency. Graph displaying 24 hours of graphical data. Graphed parameters include Output Current, Output Voltage, Output Frequency, Analog A1, Analog A2, Intake Pressure, Intake Temperature, and Motor Temperature. Please note that the last 3 parameters require a SmartGuard downhole tool. Note that red lines in the graph denote data values that are interpolated between actual data values (usually indicates that the drive was powered off).
Keypad Functions: F1: Graph. Used to select the parameter to be shown on the graph. F2: Setp. Used to activate the setpoint change mode. When activated, the Setp button is
displayed in black with white text and the up and down arrows can be used to modify the setpoint. Note that the setpoint field is also highlighted when setpoint change mode is activated. Setpoint change mode is automatically cancelled after 45 seconds or can be deactivated by pressing F2 a second time.
F3: Scale. Modifies the scale of the graph. Scale values cycle 1x, 2x, 4x, 8x, 16x. F4: Events. Activates the Events screen to display the 256 most recent events. F5: Menu. Activates the menu allowing other screens to be accessed. Up Arrow: Increases the setpoint in the Current Control, Pressure Control, and Frequency
Control modes (when setpoint change mode is active). Down Arrow: Decreases the setpoint in the Current Control, Pressure Control, and Frequency
Control modes (when setpoint change mode is active). Left Arrow: If graph scale is 1x, draws the graph for the previous day. If graph scale is > 1x,
allows scrolling through the scaled graph data. Right Arrow: If graph scale is 1x, draws the graph for the next day. If graph scale is > 1x, allows
scrolling through the scaled graph data. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
29
4.2 Event Log
Function: The Event Log screen displays the last 256 time-stamped events, included drive starts and stops, faults, and parameter changes.
Field Descriptions: Screen Name: Event Log. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Time-stamped Events: List of the last 256 events.
Keypad Functions: F1: Prev. View older events. F2: Next. View newer events. F3: Not used. F4: Not used. F5: Status. Return to the Run Status Screen. Up Arrow: Not used. Down Arrow: Not used. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
30
4.3 Select Screen (Not logged in)
Function: The Select Screen allows the user to select and display a different screen. The not logged in version of the select screen prevents non-privileged users from accessing most setup parameters.
Field Descriptions: Screen Name: Select Screen. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
List of screens that can be selected.
Keypad Functions: F1: Unlabeled. Activate the Keypad Test screen. F2: Not used. F3: Startup. Activate the Startup Control. Use this screen to enable or disable the drive and to
enable or disable automatic restarts. F4: Not used. F5: OK. Proceed to the highlighted screen. Note that the Run Status screen is always
highlighted by default when the Select Screen is drawn. Up Arrow: Move selection up the list. Down Arrow: Move selection down the list. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
31
4.4 Enter Password
Function: The Enter Password screen allows the user to log in. Once logged in, the user has access to all screens and setup parameters.
Field Descriptions: Screen Name: Enter Password Screen. This field is the name of the displayed screen.
Password digits to edit.
Keypad Functions: F1: OK. Accept the entered password. If the password is correct, the Select Screen (Logged
in) will be drawn. F2: CANCEL. Return to the Select Screen. F3: Not used. F4: Not used. F5: Not used. Up Arrow: Increment the highlighted password digit. Down Arrow: Decrement the highlighted password digit. Left Arrow: Select the digit to the left of the currently selected digit. Right Arrow: Select the digit to the right of the currently selected digit. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
Note that the default password on the drive is 3333. However, the password can be changed in the Misc. Setup screen.
If the password is forgotten, please contact your local Wood Group ESP, Inc service center.
-
2010 Wood Group ESP, Inc.
.
32
4.5 Select Screen (Logged in)
Function: The Select Screen allows the user to select and display a different screen. The Logged in version of the select screen provides access to all screens and setup parameters.
Field Descriptions: Screen Name: Select Screen. This field is the name of the displayed screen. Drive State: Running. This field displays the up-to-date state of the drive. See list of
possible values on the Run Status screen description.
List of screens that can be selected.
Use the following screens to configure the drive: Operating Mode Alarms Setup Underload Setup Start Control Frequency Setup Analog 1 Setup Analog 2 Setup Misc Setup Comm Setup Hard Starting Maintenance
The setup screens are listed together in the right column on this screen.
Note: Screens in the left column tend to be informational.
-
2010 Wood Group ESP, Inc.
.
33
Keypad Functions: F1: Unlabeled. Activate the Keypad Test screen. F2: Not used. F3: Startup. Activate the Startup Control. Use this screen to enable or disable the drive and to
enable or disable automatic restarts. F4: Not used. F5: OK. Proceed to the highlighted screen. Note that the Run Status screen is always
highlighted by default when the Select Screen is drawn. Up Arrow: Move selection up the list. Note that at the top of the list the selection will move to
the bottom of the list. Down Arrow: Move selection down the list. Note that at the bottom of the list the selection will
move to the top of the list. Left Arrow: Move selection to the left column. Right Arrow: Move selection to the right column. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
34
4.6 Fault Status
Function: The Fault Status screen allows the user to determine the state of all drive faults. Note that this screen can be chosen from the Select Screen and is automatically entered when a fault is detected.
Field Descriptions: Screen Name: Fault Status. This field is the name of the displayed screen. Drive State: Running. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Any active fault or feature that is not in its OK state is displayed.
Keypad Functions: F1: Not used. F2: Not used. F3: Not used. F4: Not used. F5: Menu. Return to the Select Screen. Up Arrow: Not used. Down Arrow: Not used. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive if running. If in the fault state, pressing STOP will attempt to clear the
faults.
-
2010 Wood Group ESP, Inc.
.
35
4.7 Amp Chart
Function: The Amp Chart screen displays 1 or 7 days worth of current data in the familiar circular format. Current data is taken every 10 seconds. The current log is sized to hold 7 days of current data.
Field Descriptions: Screen Name: Amp Chart. This field is the name of the displayed screen. Drive State: Running. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Outer Ring: 1 A. Displays the current associated with the outer circle of the amp chart.
Resolution: 0.1 A. Displays the current resolution (current difference between adjacent lines) of the amp chart.
Date: 12/01/2008. The day associated with the amp chart. On a 7 day amp chart the date displayed is for the newest displayed data.
Output Current: 0.2 A. Displays the up-to-date drive output current.
Keypad Functions: F1: Today. Draws the amp chart associated with todays date. F2: Not used. F3: 1/7 Day. Toggles the amp chart between a 1 day and a 7 day scale. F4: Not used. F5: Menu. Return to the Select Screen. Up Arrow: Not used. Down Arrow: Not used. Left Arrow: Draw the amp chart associated with the preceding day. Right Arrow: Draw the amp chart associated with the following day. START: Starts the drive if it is in the Ready state. STOP: Stops the drive if running.
-
2010 Wood Group ESP, Inc.
.
36
4.8 Trending
Function: The Trending screen displays graphs containing 5 days worth of data. Graph data is taken from the Data log and is sized to hold 35 days worth of data (with data taken every 5 minutes).
Field Descriptions: Screen Name: Trending. This field is the name of the displayed screen. Drive State: Running. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Graph: Output Frequency (Hz). Graph displaying 5 days of graphical data. Graphed parameters include Output Current, Output Voltage, Output Frequency, Analog A1, Analog A2, Intake Pressure, Intake Temperature, and Motor Temperature. Please note that the last 3 parameters require a SmartGuard downhole tool. Note that red lines in the graph denote data values that are interpolated between actual data values.
Statistics: Min Value, Max Value, Average, RMS. Values calculated from the 5 days of data from the data log.
Keypad Functions: F1: Graph. Used to select the parameter to be shown on the graph. F2: Not used. F3: Scale. Modifies the scale of the graph. Scale values cycle 1x, 2x, 4x, 8x, 16x. F4: Not used. F5: Menu. Activates the menu allowing other screens to be accessed. Up Arrow: Not used. Down Arrow: Not used. Left Arrow: If graph scale is 1x, draws the graph for the previous 5 day period. If graph scale is
> 1x, allows scrolling through the scaled graph data. Right Arrow: If graph scale is 1x, draws the graph for the next 5 day period. If graph scale is >
1x, allows scrolling through the scaled graph data. START: Starts the drive if it is in the Ready state. STOP: Stops the drive if running.
-
2010 Wood Group ESP, Inc.
.
37
4.9 History Screen
Function: The History screen displays logged performance data.
Field Descriptions: Screen Name: History Screen. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Time-stamped History Entries: The data log is circular log sized to store the last 35 days of data. Data is captured every 5 minutes.
Keypad Functions: F1: Prev. View older logged data. F2: Next. View newer logged data. F3: Set. View a different set of data. Currently there are 4 sets of data. The first set is shown.
The other sets include more drive parameters and parameters retrieved from a SmartGuard downhole tool.
F4: Save. Save the Data Log, the Event Log, the Current Data (used for the Amp Chart), and the drive configuration to a USB Flash drive. This device must be placed in the drives USB port for 10 seconds prior to activating the function. All files saved will be saved with the drives programmed serial number and the date the data was retrieved.
F5: Menu. Return to the Select screen. Up Arrow: Not used. Down Arrow: Not used. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
Note: To save history data, refer to Appendix 3.1
-
2010 Wood Group ESP, Inc.
.
38
4.10 Setup Screen
Function: The Setup screen allows any user (no login required) to modify the parameters on this screen.
Field Descriptions: Screen Name: Setup. This field is the name of the displayed screen. Drive State: Running. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Language: Allows the user to change between English and Spanish Date Format: Allows the user to choose between mm/dd/yyyy (default), dd/mm/yyyy, and dd-
Mmm-yyyy (01-Jan-2010) as the format the date will be displayed. Local/Remote: Parameter that determines if control of the drive (Start / Stop and Frequency
Reference) is under control of the drive user interface or a remote 2-wire host. Control Location: Gives the user the ability to control the drive from Keypad, SCADA or both. Drive Output: Set to Disabled to inhibit the drives response to all start commands. User Selected 1 5: The parameters selected in these fields are displayed on the Run Status
screen. Parameter Description: Local Control / Remote Control Provides user with information
concerning the selected (highlighted) parameter.
General Help: Use Up and Down arrows General help information on how to use this screen. Note that some parameters may not be changed when the drive is running. The General Help will state that the drive must be stopped when such a parameter is selected and the drive is running.
Note: Any parameter that is different from its default value is denoted by an asterisk (*) to the right of its value.
-
2010 Wood Group ESP, Inc.
.
39
Keypad Functions: F1: Edit. Edit the selected (highlighted) parameter. F2: Not used. F3: Not used. F4: Not used. F5: Menu. Return to the Select screen. Up Arrow: Select (highlight) the parameter above the currently selected parameter (wraps at top
back to bottom of list). Down Arrow: Select (highlight) the parameter below the currently selected parameter (wraps at
bottom back to top of list. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
40
4.11 SmartGuard
j Function:
The SmartGuard screen reports the current state of the SmartGuard interface.
Field Descriptions: Screen Name: SmartGuard. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
SmartGuard Data: Displays the state of the SmartGuard data: Disabled - Interface disabled
SG Fault Relay: Displays the state of the SmartGuard fault relay. OK - Data is valid, Bad - SmartGuard unit is reporting loss of sync. When the data state is disabled or bad, all SmartGuard readings are set to 0.
SmartGuard Comms: Displays the communication efficiency of the communications link with the SmartGuard. 100% indicates all messages to the SmartGuard are successful.
SmartGuard Sensor Values Intake Press, Intake Temp, Motor Temp, Discharge Pressure, Vibration, Leakage Current, Uphole Voltage, and SG Duty Cycle are displayed in their appropriate units
SmartGuard State: Displays the value of the SmartGuard fault detection state machine. Values include Initializing, OK, Fault, and Restart. Note that this parameter stays in the Init state if the SmartGuard interface is disabled.
Keypad Functions: F1: Not used. F2: Not used. F3: Not used. F4: Not used. F5: Menu. Return to the Select screen. Up Arrow: Not used. Down Arrow: Not used. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
41
4.12 Drive I/O
Function: The Drive I/O screen allows the operator to easily determine the state of all the drive I/O.
Field Descriptions: Screen Name: Drive I/O. This field is the name of the displayed screen. Drive State: Running. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
S1 S8: Drive digital inputs. Note: S8 is not available. These values will be 0 or 1 if the input is not used or if its function is disabled. If the function associated with the input is enabled (i.e. external fault 1, standby, and Breaker 2 detection features are enabled on the Misc Setup screen), more descriptive text will be displayed (OK, FAULT, RUN, STANDBY).
M1-M2, M3-M4: Drive digital outputs. Analog 1, Analog 2: Drive analog inputs. The values are scaled as programmed in the Analog
1 Setup and Analog 2 Setup screens.
General Help: Press Menu soft key General help information on how to use this screen.
-
2010 Wood Group ESP, Inc.
.
42
Keypad Functions: F1: Not used. F2: Not used. F3: Not used. F4: Not used. F5: Menu. Return to the Select screen. Up Arrow: Not used. Down Arrow: Not used. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
43
4.13 Last Fault
Function: The Last Fault screen allows the operator the ability to easily view the drive condition when the last fault occurred.
Field Descriptions: Screen Name: Last Fault. This field is the name of the displayed screen. Drive State: Running. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Parameter Values: Values of key parameters when the drive last faulted. Selecting the fault code parameter will bring up a window that explains the fault code. Selecting a bitmap parameter (one displayed in hexadecimal format) will bring up a window that describes the meaning of all set bits.
General Help: Press Menu soft key General help information on how to use this screen.
Keypad Functions: F1: Not used. F2: Not used. F3: Not used. F4: Not used. F5: Menu. Return to the Select screen. Up Arrow: Select (highlight) the parameter above the currently selected parameter (wraps at top
back to bottom of list). Down Arrow: Select (highlight) the parameter below the currently selected parameter (wraps at
bottom back to top of list. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
44
4.14 All Monitors
Function: The All Monitors screen displays a variety of parameters that may be useful for troubleshooting problems in the field.
Field Descriptions: Screen Name: All Monitors. This field is the name of the displayed screen. Drive State: Running. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Drive Monitor Registers: Most of the parameters displayed are directly from the underlying drive. See table below for explanation of bitmapped (displayed in hexadecimal) registers.
Drive Comms: Displays the quality of the communications with the drive over the last 30 seconds.
SmartGuard Comms: Displays the quality of the communications with the SmartGuard Surface Unit (always set to 100% if the SmartGuard is disabled in the Misc Setup screen).
Cabinet Temp: Displays internal drive temp from the power module heat sink with old HMI. With the new HMI, the temperature is taken from the new HMI.
UI S/W Rev: Displays the revision of the User Interface software. O/S Build: Displays the date of the Windows CE operating system version installed on the HMI.
General Help: Press Menu soft key General help information on how to use this screen.
Note: You may use the up and down arrow keys to select monitor values. Selecting the fault code parameter will bring up a window that explains the fault code. Selecting a bitmap parameter (one displayed in hexadecimal format) will bring up a window that describes the meaning of all set bits.
-
2010 Wood Group ESP, Inc.
.
45
Drive Status Bit 0 Denotes 1 Denotes 0 Drive Stopped Drive Running 1 Forward Operation Reverse Operation 2 Drive Startup in Progress Drive Startup Completed 3 No Fault Fault 4 No Data Setting Error Data Setting Error 5 Digital Output 1 is OFF Digital Output 1 is ON 6 Digital Output 2 is OFF Digital Output 2 is ON
7 F Not Used Not Used
Fault Details
Bit 0 Denotes 1 Denotes 0 No Error Over current or Ground Fault Error 1 No Error Main Circuit Overvoltage 2 No Error Drive Overload 3 No Error Drive Overheat 4 Not Used Not Used 5 No Error Fuse Blown 6 No Error PI Feedback Reference Lost 7 No Error External Error 8 No Error Hardware Error 9 No Error Motor Overload or Overtorque A No Error Underload Fault B No Error Main Circuit Undervoltage C No Error Main Circuit Undervoltage, Control Power
Supply Error, Inrush Prevention Circuit Error, or Power Loss
D No Error Missing Output Phase E No Error ModBus Comm Error F HMI Connected HMI Disconnected
Drive Fault Code
Current Fault exhibited by drive. (There are a few codes that are not included in the Fault Details bitmapped list above.) 0 No Fault 25 DEV Speed Deviation 1 PUF DC Bus Fuse Open 26 OVL Enhanced O-load 2 UV1 DC Bus Undervolt 27 PF Input Phase Loss 3 UV2 Ctl PS Undervolt 28 LF Output Phase Loss 4 UV3 MC Answerback 29 OH3 Motor Overheat 1 5 SC Short Circuit 30 OPR HMI Disconnect 6 GF Ground Fault 31 ERR EEPROM R/W Err 7 OC Over current 32 OH4 Motor Overheat 2 8 OV DC Bus Overvolt 33 CE Serial Com Err 9 OH Heatsink Overtemp 34 BUS Option Com Err 10 OH1 Heatsink Max Temp 35 E-15 SI-F/G Com Err 11 OL1 Motor Overload 36 E-10 SI-F/G CPU Down 12 OL2 Inverter Overload 37 CF Out of Control 13 OL3 Overtorque 1 38 SVE Zero Servo Fault 14 OL4 Overtorque 2 39 EF0 Opt External Fault 15 RR DynBrk Transistor 40 FBL Feedback Loss
-
2010 Wood Group ESP, Inc.
.
46
Data Link Status
Bit 0 Denotes 1 Denotes 0 Not Writing Data Writing Data
1 2 Not Used Not Used 3 No Range Error Upper or Lower Limit Errors 4 No Integrity Error Data Integrity Error
5 F Not Used Not Used
Digital Inputs
Bit 0 Denotes 1 Denotes 0 Input 9 OFF Input 9 ON 1 Input 9 OFF Input 10 ON 2 Input 9 OFF Input 11 ON 3 Input 9 OFF Input 12 ON 4 Input 9 OFF Input 13 ON 5 Input 9 OFF Input 14 ON 6 Input 9 OFF Input 16 ON
7 - F Not Used Not Used
Drive Status 2
Bit 0 Denotes 1 Denotes 0 Drive Stopped Drive Running 1 Drive not at Zero Speed Drive at Zero Speed 2 Drive Freq does not match internal speed Drive Freq matches internal speed 3 Drive is not at Setpoint (accelerating) Drive is at Setpoint 4 Freq Detect 1 Not Active Freq Detect 1 Active 5 Freq Detect 2 Not Active Freq Detect 2 Active 6 Drive Startup in Progress Drive Startup Complete 7 No Low Voltage Detected Low Voltage Detected 8 Drive Output Baseblock is Not Active Drive Output Baseblock is Active 9 Freq Reference Mode is Communicating Freq Ref Mode is Not Communicating A Run Command Mode is Communicating Run Cmd Mode is Not Communicating B Overtorque is Not Detected Overtorque is Detected C Frequency Reference OK Frequency Reference Lost D Retrying is Not in Progress Retrying in Progress E No Error Error F ModBus Comm Timeout is Not Detected ModBus Comm Timeout Detected
16 RH DynBrk Resistor 41 LL3 Loss of Load 17 EF3 External Fault 1 42 UL4 Undertorq Det 2 18 EF4 External Fault 2 43 OL7 HSB-OL 19 EF5 Fault Not Enabled 44 ULF Underload 20 EF6 Fault Not Enabled 45 A1-HI Terminal A1 High 21 EF7 Breaker 2 Fault 46 A1-LO Terminal A1 Low 22 EF8 Fault Not Enabled 47 A2-HI Terminal A2 High 23 FAN Cooling Fan Error 48 A2-LO Terminal A2 Low 24 OS Overspeed Detect
-
2010 Wood Group ESP, Inc.
.
47
Digital Output Status
Bit 0 Denotes 1 Denotes 0 Digital Output 1 OFF Digital Output 1 ON 1 Digital Output 2 OFF Digital Output 2 ON
2 F Not Used Not Used
Communication Error
Bit 0 Denotes 1 Denotes 0 No Error CRC Error 1 No Error Invalid Data Length 2 Not Used Not Used 3 No Error Parity Error 4 No Error Overrun Error 5 No Error Framing Error 6 No Error Timeout
7 F Not Used Not Used
Keypad Functions: F1: Not used. F2: Not used. F3: Not used. F4: Not used. F5: Menu. Return to the Select screen. Up Arrow: Select (highlight) the parameter above the currently selected parameter (wraps at top
back to bottom of list). Down Arrow: Select (highlight) the parameter below the currently selected parameter (wraps at
bottom back to top of list. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
48
4.15 Run Info
Function: Displays current running information
Field Descriptions: Screen Name: Run Info. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Keypad Functions: F1: Not used. F2: Not used. F3: Not used. F4: Not used. F5: Menu Up Arrow: Not used Down Arrow: Not used Left Arrow: Not used Right Arrow: Not used START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
49
4.16 Set Date and Time
Function: The Set Date and Time screen allows the user to adjust the date and time on the drives real-time clock.
Field Descriptions: Screen Name: Set Date and Time Screen. This field is the name of the displayed screen.
Date and Time fields to edit. (mm/dd/yyyy hh:mm 24 hour display)
Note: Selectable date format is adjusted on the Setup Screen.
Keypad Functions: F1: OK. Accept the new date and time. F2: CANCEL. Do not change the date and time. Return to the Select Screen. F3: Not used. F4: Not used. F5: Not used. Up Arrow: Increment the highlighted date / time field. Down Arrow: Decrement the highlighted date / time field. Left Arrow: Select the field to the left of the currently selected field. Right Arrow: Select the field to the right of the currently selected field. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
50
4.17 Linear List Menu
Function: The Linear List menu allows the user to quickly jump to the desired section of the linear list - the registers in the inverter unit. The values of the parameters in the Linear List should only be modified upon recommendation of Wood Group, ESP Engineering.
Field Descriptions: Screen Name: Linear List. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Drive Register Names: A group of 10 drive registers spread throughout the drive register map.
General Help: Use Up and Down arrows General help information on how to use this screen.
Note: See Appendix 4 for full Linear List Parameters, functions, ranges and default settings.
Keypad Functions: F1: OK. Jump to the page of the Linear List that begins with the selected register. F2: Not used. F3: Not used. F4: Not used. F5: Menu. Return to the Select screen. Up Arrow: Select (highlight) the parameter above the currently selected parameter (wraps at top
back to bottom of list). Down Arrow: Select (highlight) the parameter below the currently selected parameter (wraps at
bottom back to top of list. Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
51
4.17.1 Linear List
Function: The Linear List reveals the registers in the inverter. The values of the parameters in the Linear List should only be modified upon recommendation of Wood Group, ESP Engineering.
Field Descriptions: Screen Name: Linear List. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Drive Register Names: A group of 10 drive registers that can be modified. See Appendix 4 for complete linear list
General Help: Use Up and Down arrows General help information on how to use this screen. Note that some parameters may not be changed when the drive is running. The General Help will state that the drive must be stopped when such a parameter is selected and the drive is running.
Note: Any parameter that is different from its default value is denoted by an asterisk (*) to the right of its value.
Keypad Functions: F1: Edit. Edit the selected (highlighted) parameter. F2: Not used. F3: Not used. F4: Not used. F5: Menu. Return to the Linear List Menu screen. Up Arrow: Select (highlight) the parameter above the currently selected parameter (wraps at top
back to bottom of list). Down Arrow: Select (highlight) the parameter below the currently selected parameter (wraps at
bottom back to top of list. Left Arrow: Display the previous set of 10 registers. Right Arrow: Display the next set of 10 registers. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
52
4.18 Operating Mode
Function: The Operating Mode screen allows a logged on user to choose the operating mode of the drive and to set operating mode specific parameters.
Note: This screen changes based on the drives operating mode. By default the drive operating mode is Frequency Control. Section 3.6.1 describes all drive operating modes.
Operating Modes:
Frequency Control Section 4.18.2 Analog Follower - Section 4.18.3 Current Control - Section 4.18.4 Pressure Control - Section 4.18.5
-
2010 Wood Group ESP, Inc.
.
53
4.18.1 Selection Parameter Change
Function: The Selection Parameter Change screen is drawn when the Edit soft key is activated in the Operating Mode screen with the Drive Mode parameter selected. In this screen the user selects the drive operating mode option that is desired.
Field Descriptions: Screen Name: Selection Parameter Change Screen. This field is the name of the displayed
screen.
Parameter Name and present value: Drive Mode: Frequency Control. Shows the name of the parameter being edited as well as the present selection.
Parameter Description: Defines the operational mode of the drive. Gives a text description of the parameter being edited.
Options: Current Control, . Displays the options that may be selected.
Keypad Functions: F1: OK. Accept the highlighted option as the value of the parameter. F2: CANCEL. Abort the editing procedure and retain the present value of the parameter. F3: Not used. F4: Not used. F5: Not used. Up Arrow: Select (highlight) the option above the currently selected option (wraps at top back to
bottom of list). Down Arrow: Select (highlight) the option below the currently selected option (wraps at bottom
back to top of list). Left Arrow: Not used. Right Arrow: Not used. START: Starts the drive if it is in the Ready state. STOP: Stops the drive.
-
2010 Wood Group ESP, Inc.
.
54
4.18.2 Operating Mode Frequency Control
Function: The Operating Mode Frequency Control screen allows the user to set the parameters associated with frequency control mode.
Field Descriptions: Screen Name: Operating Mode. This field is the name of the displayed screen. Drive State: Ready. This field displays the up-to-date state of the drive. See list of possible
values on the Run Status screen description.
Drive Mode: Parameter that defines the operational mode of the drive. Options include Current Control, Pressure Control, Frequency Control, and Analog Follower.
Frequency Setpoint: The frequency setpoint when the drive is running. Note that Frequency Setpoint is a parameter associated with Frequency Control mode; other parameters will be displayed in other control modes.
Startup Mode: When the Startup Mode is set to ONCE, the drive will ramp up to the Setp1 Frequency for the Setp1 Time and then return to the original Frequency setpoint. This function will only be activated on the next startup and then turned OFF. When the Startup Mode is set to ON, this procedure will occ