
Variational Image Restoration Leah Bar PhD. thesis supervised by: Prof. Nahum Kiryati and Dr. Nir...
44
Variational Image Variational Image Restoration Restoration Leah Bar Leah Bar PhD. thesis supervised by: Prof. Nahum Kiryati and Dr. Nir Sochen * School of Electrical Engineering *Department of Applied Mathematics Tel-Aviv University, ISRAEL
-
date post
20-Dec-2015 -
Category
Documents
-
view
232 -
download
1
Transcript of Variational Image Restoration Leah Bar PhD. thesis supervised by: Prof. Nahum Kiryati and Dr. Nir...

Variational Image Variational Image RestorationRestoration
Leah BarLeah BarPhD. thesis supervised by:
Prof. Nahum Kiryati and Dr. Nir Sochen*
School of Electrical Engineering
*Department of Applied Mathematics
Tel-Aviv University, ISRAEL
2
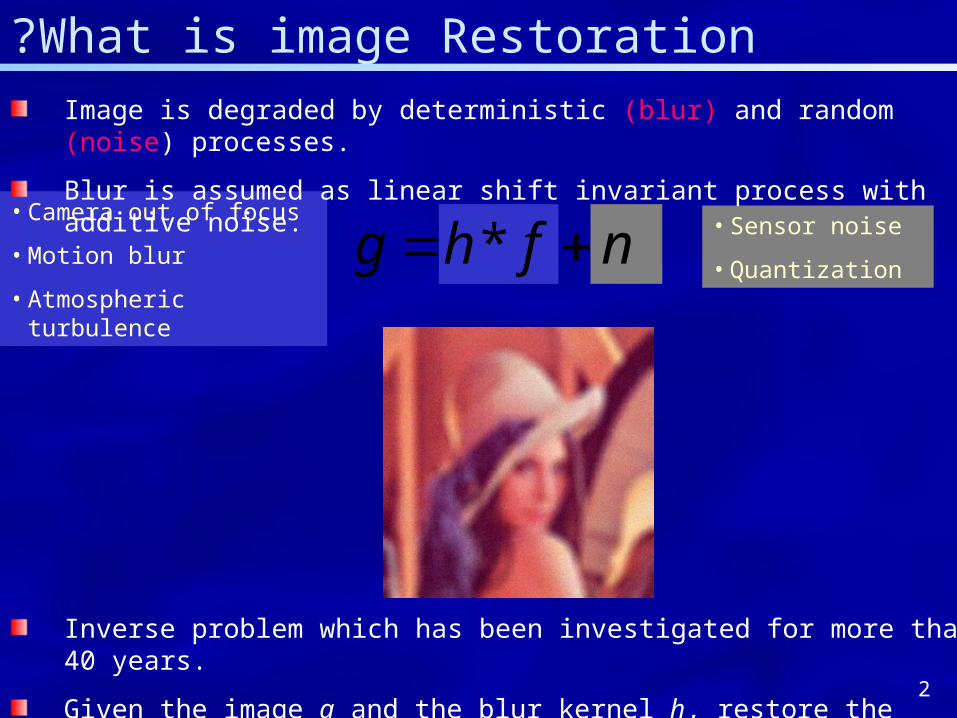
Inverse problem which has been investigated for more than 40 years.
Given the image g and the blur kernel h, restore the original image f .
What is image Restoration?
nfhg *• Camera out of focus
• Motion blur
• Atmospheric turbulence
• Sensor noise
• Quantization
Image is degraded by deterministic (blur) and random (noise) processes.
Blur is assumed as linear shift invariant process with additive noise.

3
Image Restoration - Applications
Microscopy

4
Image Restoration - Applications
Astronomy

5
Image Restoration - ApplicationsMedical Imaging

6
ffff NFHG nfhg *
Frequency domain:
Spatial domain:
Assuming Gaussian distribution of the noise
22 2/
)( nLn
Aen
Bayesian and Variational Viewpoints
22 2/*
maxarg)|(maxargˆ nLfhg
ffML efgf
Maximum Likelihood
min*)( 2 L
fhgfF
Variational
Noise amplification
In high frequencies
fffff GHHHF *1* )( Ill-Posed Solution
f
f
ff G
constH
HF
2
*
Pseudo inverse Filter

7
Bayesian and Variational Regularization
Maximum a posteriori prob. MAP)(
)()|()|(
g
ffggf
2
2
2
2*
maxarg)|(maxargˆ d
L
n
Lffhg
ffMAP eAegff
min/*)( 22
22 LdnL
ffhgfF Variational (Tikhonov , 1977)
][
][
][][
22
22
*
kG
kkH
kHkF
d
n
Solution – Wiener Filter (over smoothing)
smoothness prior

8
Edge Preservation
Edges are very important features in image processing, and therefore have to be preserved.
Image Deconvolution
Image Denoising
Preserve Edges
observed image - g
recovered image - f

9
Total Variation Regularization
dxffhgfFL
)(2*)(
Rudin, Osher, Fetami 1992
Wiener Total variation

10
Mumford-Shah Segmentation (Mumford and Shah, 1985)
KK
ddxfdxfgKfF \
22)(),(
gradients within segments
total edge lengthdata fidelity
Ω: image domain K: edge set f: recovered image g: observed image
Canny edges M-S edgesOriginal
Image is modeled as piecewise smooth function separated by edges

11
Deconvolution with Mumford-Shah Regularization
KK
ddxfdxfhgKfF \
22)*(),(
gradients within segments
total edge lengthdata fidelity
M-S functional: difficult to minimize (free-discontinuity problem).
Solution is via the -convergence framework (Ambrosio and Tortorelli 1990)
Strategy: approximate the solution by approximation of the problem
),(minarg),(minarg 0 KfFvfF
),(),( 0 KfFvfF
L. Bar, N. Sochen, N. Kiryati, ECCV 2004

12
Fj(u)=sin (ju)
uj=1.5n/j
Example:
-convergence
A sequence -converges to if:
],[: XFj],[: XF
)(inflim)(: jjjj uFuFuu
)(suplim)(: jjjj uFuFuu
1. liminf inequality
2. existence of recovery sequence
-lim(Fj)=-1
)De Giorgi, 1979(

13
Fundamental theorem of -convergence:
Suppose that
and let a compact set exist such that for all j,
then .
Moreover if uj is a converging sequence such that
then its limit is a minimum point for F.
XK
jX
jX
FF inflimmin
-convergence
jj FF lim
jk
jx
FF infinf
jxj
jjj
FuF inflim)(lim
)(minarg)(minarg fFfF jj

Proof: Let satisfyKu j .infinflim)(inflim jX
jjjj FuF
There exists a subsequence converging to
some u, such that
kj
u
.infinflimlim jX
jjjk FuFkk
,infinfliminflim)(inf)1
jX
jjjkX
FuFuFFkk
)()(supliminfsuplim)2
uFuFF jjjjX
j
*
This is satisfied for every u and in particular
).(infinfsuplim uFFX
jX
j
(*)infinfliminf
infsupliminf
jX
jX
jX
jX
FF
FF
jX
jX
FF infliminf
jX
jX
Finflimmin

15
Deconvolution with Mumford-Shah Regularization
KK
ddxfdxfhgKfF \
22)*(),(
dx
vvdxfvdxfhgvfF
4
1||)*(),(
22222
gradients within segments
total edge lengthdata fidelity
v(x): smooth function v(x)~0 at edges v(x)~1 otherwise (in segments)

16
Iterate
Minimize with respect to v by Euler equation (edge detection)
Minimize with respect to f by Euler equation (image restoration)
02),(** 2 fvyxhgfhf
F
022
12 22
v
vfv
v
F
Deconvolution with Mumford-Shah Regularization

17
Zero padding
Zero paddingZero padding
Convolution Implementation
Neumann boundary conditions
FFT multiplications

18
Deconvolution with Mumford-Shah Regularization
blurred suggested restoration
suggested edges (v)

19
Semi-blind Deconvolution via Mumford-Shah Regularization
L. Bar, N. Sochen, N. Kiryati, IEEE Trans. Image Processing, 2006
Blind deconvolution: the blur kernel is unknown
Chan and Wong 1998:
dxhdxfdxfhghfF 2*),(
dxhdx
vvdxfvdxfhgvfF
22
2222
4
1||)*(),,(
Suggested: Gaussian kernel parameterized by .
-The restored image is very sensitive to the recovered kernel.- The recovered kernel depends on the contents of the image.

20
Semi-blind Deconvolution via Mumford-Shah Regularization
blurred suggested methodChan-Wong

21
Image Deblurring in the Presence pf Salt-and-Pepper noise
L. Bar, N. Sochen, N. Kiryati, Scale Space, 2005 (best student paper)
Special care should be taken in the case of salt-and-pepper noise
L2 fidelity term in not adequate anymore
Total Variation

22
Image Deblurring in the Presence pf Salt-and-Pepper noise
L. Bar, N. Sochen, N. Kiryati, Scale Space, 2005 (best student paper)
Special care should be taken in the case of salt-and-pepper noise
L2 fidelity term in not adequate anymore
Sequential approach: Deblurring following median-type filtering-poor
1. Median filter 3x3 window 2. TV restoration3. Noise remains!
1. Median filter 5x5 window2. TV restoration3. Nonlinear distortion!

23
Image Deblurring in the Presence pf Salt-and-Pepper noise
Suggested approach: robust L1 fidelity and Mumford-Shah
regularization
dx
vvdxfvdxfhgvfF
4
1||)*(),(
22222
gradients within segments
total edge lengthdata fidelity
Iterate
Minimize with respect to v by Euler equation (edge detection)
Minimize with respect to f by Euler equation (image restoration)
02),(**
* 2
2
fvyxh
fhg
gfh
f
F
022
12 22
v
vfv
v
F

24
02),(**
*:Calc
22
22:Calc
121
21
11
1221
nn
n
nn
nnn
fvyxhghf
ghff
vfv
Linearization via fixed point scheme:
coefficients in nonlinear terms are lagged by one iteration → linear equation
2,1
1,121
2,1
1,1
*2),(*
*
*
ghf
gfvyxh
ghf
hfln
lnn
ln
ln
Image Deblurring in the Presence pf Salt-and-Pepper noise
)(),( ,1,, lnlnln fGffvH Linear operator

25
Results - pill-box kernel (9x9), radius 4, 10% noise
suggested5x5 median + TV3x3 median + TV
blurred blurred and noisy

26
Results - pill-box kernel (7x7), radius 3, 1% noise
blurred and noisy recovered

27
blurred and noisy recovered
Results - pill-box kernel (7x7), radius 3, 10% noise

28
blurred and noisy recovered
Results - pill-box kernel (7x7), radius 3, 30% noise

29
What is the theoretical explanation to the simultaneous deblurring and denoising?
Is Mumford-Shah regularization better than Total Variation?
L. Bar, N. Sochen, N. Kiryati, International Journal of Computer Vision
There is discrimination between image and noise edges.
Image edges are preserved while impulse noise is removed
Theoretical Questions

30
Edge Preservation
|)(|Fidelity Data)( fRfF Relations between:
robust statistics
anisotropic diffusion
line process (half-quadratic)
were shown by
Black and Rangarajan, IJCV, 1996 Black, Sapiro, Marimont and Heeger, IEEE T-IP, 1998
robust statisticsanisotropic diffusionline process
(half quadratic)
Perona & Malik, 1987
Geman & Yang, 1993
Charbonnier et al., 1997
Hampel et al., 1986

31
Edge Preservation
1. Robust smoothness dxffR
)( Gradient Descent:
f
ffdivft '
Influence function-
fft2
f
fft
s ’(s)=(s)

32
Edge Preservation
2. Diffusion Isotropic diffusion (heat equation) fdivft
ffgdivft g is “edge stopping” function 0lim
fgf
Anisotropic diffusion (Perona and Malik, 1987)
From robust smoothness point of view f
ffg
'
2
22 5.01log)(
x
x22 /2
2)(
x
xx
22 2/1
1)(
xxg
Lorentzian

33
Diffusion Illustration
Original Isotropic DiffusionAnisotropic Diffusion

34
3. Line-process (Half-Quadratic) (Geman and Yang, 1993)
Edge Preservation
)(inf||
2bfbfR
MbL
Dual function b represents edges
Penalty function enforces sparse edges
0b1b
across edges
otherwise
)(inf2
bfbfMbL
From robust smoothness point of view
35
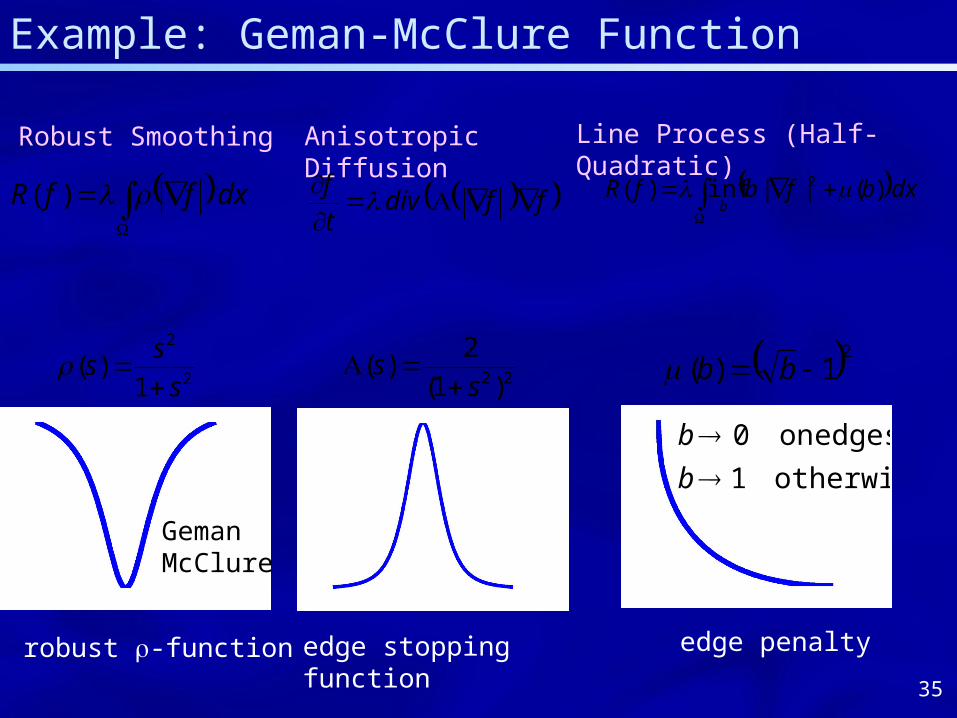
Example: Geman-McClure Function
2
2
1)(
s
ss
dxffR
)(
Robust Smoothing
robust -function
Geman McClure
edge stopping function
22 )1(
2)(
ss
Anisotropic Diffusion
ffdivt
f
edge penalty
21)( bb
Line Process (Half-Quadratic)
dxbfbfRb
)(||inf)( 2
otherwise1
edgeson 0
b
b

36
Relation to M-S Terms
The Geman-McClure function in half-quadratic form
22
2
2
11
bfb
f
f
Appears in M-S terms with b = v2
dx
vvdxfvdxfhgvfF
4
)1(*),(
222222
M-S: extended line process = extended Geman-McClure
Edges are forced to be smooth and continuous
image edges are preserved

37
Color Deblurring in the Presence of Impulsive Noise
L. Bar, A. Brook, N. Sochen, N. Kiryati, VLSM’05
),()*(),( 2 vfdxfhgvfF MS
RGBa
aa
222222yxyxyx BBGGRRf
Channels have to be coupled
One edge map for all channels

38
Image Restoration in 3D
blurred
recovered edges

39
Future Work: Space Variant Image
Restoration
preliminary results

40
Conclusions
Novel unified approach to variational segmentation, deblurring and denoising.
Mumford-shah regularization reflects the piecewise-smooth model of natural images.
Relations to robust statistics and anisotropic diffusion show that Mumford-Shah regularization is a better edge detector.
Restoration outcome is superior to state-of-the-art methods

41
Conclusions
Novel unified approach to variational segmentation, deblurring and denoising.
Mumford-shah regularization reflects the piecewise-smooth model of natural images.
Relations to robust statistics and anisotropic diffusion show that Mumford-Shah regularization is a better edge detector.
Restoration outcome is superior to state-of-the-art methods

42
Conclusions
Novel unified approach to variational segmentation, deblurring and denoising.
Mumford-shah regularization reflects the piecewise-smooth model of natural images.
Relations to robust statistics and anisotropic diffusion show that Mumford-Shah regularization is a better edge detector.
Restoration outcome is superior to state-of-the-art methods

43
Conclusions
Novel unified approach to variational segmentation, deblurring and denoising.
Mumford-shah regularization reflects the piecewise-smooth model of natural images.
Relations to robust statistics and anisotropic diffusion show that Mumford-Shah regularization is a better edge detector.
Restoration outcome is superior to state-of-the-art methods

Thank you for your attention


















