
Variable Structure Control - Personal Web Page ...hgk22/courses/MEM636_638/Lecture9b... ·...
37
Discontinuous Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University
Transcript of Variable Structure Control - Personal Web Page ...hgk22/courses/MEM636_638/Lecture9b... ·...

Discontinuous Systems
Harry G. KwatnyDepartment of Mechanical Engineering & Mechanics
Drexel University

Outline Simple Examples
Bouncing ball Heating system Gearbox/cruise control
Simulating Hybrid Systems – Simulink with Stateflow Stateflow/Simulink Bouncing ball Power conditioning system Inverted pendulum
Brocket’s Necessary Condition Some systems cannot be stabilized by smooth state feedback Extensions to BNC
Solutions to Discontinuous Differential Equations Various notions of ‘solution ‘may be appropriate

SIMPLE EXAMPLES

Bouncing Ball
( ) ( )( ) ( ) [ ]
Free fall:
0 Collision:
, 0,1
y g
y t y t
y t cy t c
+ −
+ −
= −
= =
= − ∈

Bouncing Ball0
2 00
10 0 01 2
1 10 0 01 1 1
0
1 202
2 2 2, , ,
2 2 2 11
2 1For 0 1, lim1
Zeno phenomenon transitions in finite time
ii
NN N Ni i
N ii i i
NN
v v gtvx v t gt tg
v v vt t c t cg g g
v v v cT t c cg g g c
vc Tg c
−
− −= = =
→∞
= −
= − = ⇒ =
= = =
−= = = = −
≤ < = −
∞
∑ ∑ ∑
Time for Ntransitions

Heater
( ) ( )
{ }
( ) ( )( ) ( )
continuous state: ,50
, , ,100
discrete state: , ,
, 73, 73
1 , , ,, 77, 77
x Rx q off
x f x q f x qx q on
q on off
on q off xoff q off x
q k x q k x qoff q on xon q on x
ϕ ϕ
∈
− + == = − + =
∈
= ≤ = >+ = = = ≥ = <

Automobile Gearbox Control Problem 1: Automated gearbox - coordinate
automatic gearshift with throttle command Problem 2: Cruise control – automate throttle and
gearbox to maintain speed Background
R. W. Brockett, "Hybrid Models for Motion Control," in Perspectives in Control, H. L. Trentelman and J. C. Willems, Ed. Boston: Birkhauser, 1993, pp. 29-54.
S. Hedlund and A. Rantzer, "Optimal Control of Hybrid Systems," presented at Conference on Decision and Control, Phoenix, AZ, pp. 3972-3977, 1999.
F. D. Torrisi and A. Bemporad, "HYSDEL-A Tool for Generating Computational Hybrid Models for Analysis and Synthesis Problems," IEEE Transactions on Control Systems Technology, vol. 12, pp. 235-249, 2004.

Transmission( ) ( )
[ ]
( ){ }
2
1 2 3 4 5
,
sin
0,1 throttle positionengine speedengine torque-speed characteristic
, , , , transmission statecorresponding gear ratios1, ,5
rear gear
i
i
i
q finq eng b veh
wheel
eng
q
fin
R RM v f u F cv M g
r
u
f uq q q q q qR i
R
ω α
ωω
= − − −
∈
∈
=
ratiowheel radiusbrake force
wheel
b
rF

Cruise Control
2
2 , gear2
P I I
q fin
wheel
qv k v k v k v
R Rv
rω
+ + =
=
3
3 , gear3
P I I
q fin
wheel
qv k v k v k v
R Rv
rω
+ + =
=
5
5 , gear5
P I I
q fin
wheel
qv k v k v k v
R Rv
rω
+ + =
=
4
4 , gear4
P I I
q fin
wheel
qv k v k v k v
R Rv
rω
+ + =
=
1
1, gear1
P I I
q fin
wheel
qv k v k v k v
R Rv
rω
+ + =
=
0 , neutralq
uω ω≥ uω ω≥ uω ω≥ uω ω≥
lω ω<lω ω<lω ω< lω ω<stallω ω<
uω ω≥
( ) ( ) ( ) ( )2
Continuous control - throttle and brake are chosen so that
sin
- a standard feedback linearized design with PI controller.- notice that cont
i
i
b
q fineng b veh q P I
wheel
u FR R
f u F cv M g M k v v k v v d tr
ω α
•
− = + + − + − ∫
rol depends on the discrete state.
Discrete control - ad hoc gear shift strategy.•
( )engf ω
ωlω uω

Cruise Control Issues Choice of shift thresholds Wide spread implies large speed deviation before
shift Narrow spread opens possibility of excessive
shifting, even chattering Does not explicitly consider throttle and brake
limits It must be verified that the engine does not
stall or exceed red line

SIMULATING HYBRID SYSTEMS WITH
STATEFLOW/SIMULINK

Stateflow
Stateflow is a Simulink toolbox Provides a graphical means to incorporate
discrete event process into Simulink Based on the concept of statecharts Harel, D., Statecharts: A Visual Formalism for
Complex Systems. Science of Computer Programming, 1987. 8: p. 231-274.
Has evolved to represent an implementation of UML

Simulating Hybrid Systems in Stateflow/SIMULINK
Finite StateMachine
Event Generator SwitchedDynamical System
Mode Selector
Interface
Discrete Inputs
Discrete Outputs
Continuous Inputs
Continuous Outputs
DiscreteDisturbances
ContinuousDisturbances
Stateflow
Simulink
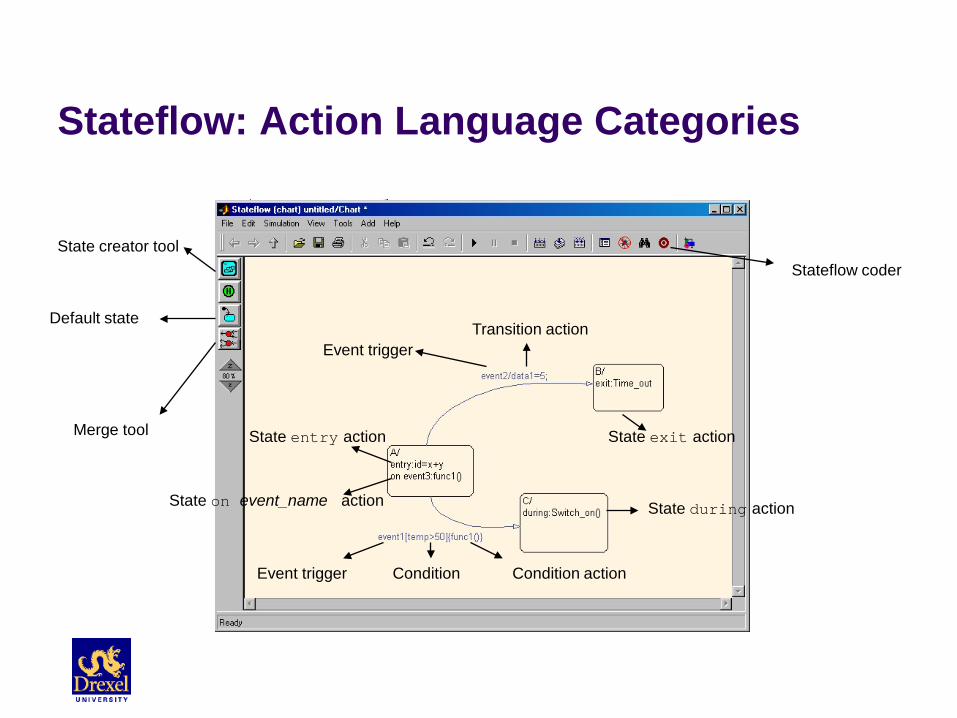
Stateflow: Action Language Categories
Event triggerTransition action
State exit action
State during action
Condition actionConditionEvent trigger
State entry action
State on event_name action
State creator tool
Merge tool
Default state
Stateflow coder

Bouncing Ball
( ) ( )( ) ( ) [ ]
Free fall:
0 Collision:
, 0,1
y g
y t y t
y t cy t c
+ −
+ −
= −
= =
= − ∈

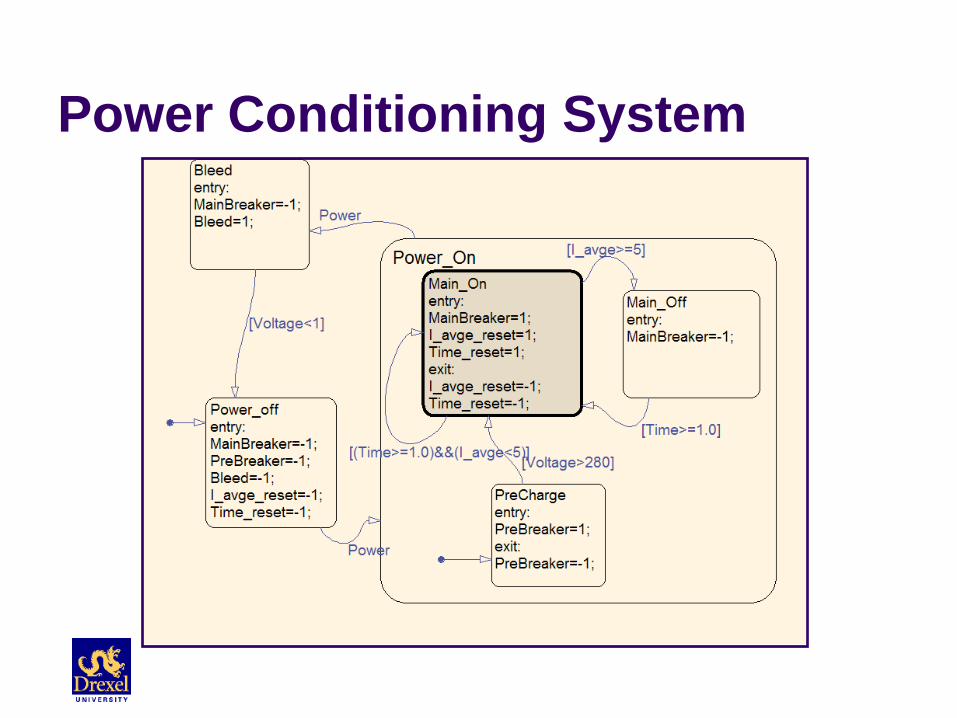
Power Conditioning System
High power drives in vehicle applications Startup (precharge) Normal (current regulation) Shutdown (bleed)
Background (Boost converters) M. Senesky, G. Eirea, and T. J. Koo, "Hybrid Modeling and Control of Power
Electronics," in Hybrid Systems: Computation and Control, vol. 2623, Lecture Notes in Computer Science. New York: Springer-Verlag, 2003, pp. 450-465.
P. Gupta and A. Patra, "Hybrid Sliding Mode Control of DC-DC Power Converters," presented at IEEE Tencon 2003, Bangalore, 2003.
Li
C ov+-E
oR
bleedRpreR

Power Conditioning System
1s
Time
Synch
Step1
Step
Scope
Total Load Current
Main Breaker
Precharge
Bleed
Bank Voltage
Mains Voltage
Mains Current
Bank Current
Power System
Power
1
On
-1
Off
Voltage
I_av ge
Time
MainBreaker
PreBreaker
Bleed
I_av ge_reset
Time_reset
Modes1Memory2
Memory1
Memory
10
Gain
0
Display
1
Constant1
Clock
1s
Avge Current
MainBreaker {OFF=-1, ON=1}MainBreaker {OFF=-1, ON=1}
PreBreaker {OFF=-1, ON=1}PreBreaker {OFF=-1, ON=1}
Bank Voltage
Mains Voltage
Mains Current
Bank Current
Bleed Breaker {OFF=-1, ON=1}Bleed Breaker {OFF=-1, ON=1}Av ge Current Reset
Av ge Current Reset
Time Reset
I_av ge
Time
Power Conditioning System

Power Conditioning System

Inverted Pendulum ~ 1
22 cos sincos sin
Suppose we choose to regulate , so that thependulum equations are
sin coswhere is treated as a control.
x v
v Fv
F v
uu
θ ω
θω ω θθ ω θ
θ ωω θ θ
=
=
+ = ++ =
== −

Inverted Pendulum ~ 2
[ ]
Suppose we wish to design a global feedback controller that will steer any initial state to the upright positionwith the constraint 1,1 .
Feedback linearization will not work in general, choose so t
u
u
∈ −
hatsin cos 0 2 0
2 sin within constraints only near 0.cos
u
u
θ θ θ θ θ θ
θ θ θ θθ
− + = → + + =
− − −⇒ = =

Inverted Pendulum Swing-up Strategy
( )
[ ]( )
212, sin cos cos 1
0 when 0, 0
1) pump/remove energy into system until 0, ,
sin cos sin cos2) wait until pendulum is close to upright3) apply feedback
pend
pend
pend pend
u EE
E E
E u u
θ ω ω θ θ ω θ
ω θ
ε ε
ω θ θ θω ω θ
= = − = + −
= = =
≈ ∈ −
= − − = −
linearizing control

Inverted Pendulum: Control Strategy
Constant energy trajectories, 0,in 'wait' state. Switch to 'stabilize' inblue box.
u =

Brockett’s Necessary Condition

Necessary Condition for Asymptotic Stability
( ) ( )
( )( )( ) ( )( )
, , , , 0,0 0: (Brockett) Suppose is smooth and the origin is
stabilized by a smooth state feedback control ,
0 0. Then the mapping : ,
, maps neighborhoods of the origi
n m
n n
x f x u x R u R ff
u x
u F R R
F x f x u x
= ∈ ∈ =
= →
=
Theorem
( )( )
n
into neighborhoods of the origin, i.e.0 0 such that
alternatively, is a neighborhood of 0 .m n
B F B
f B R Rε δ
δ
δ ε∀ > ∃ > ⊂
× ∈

Example 11
2 1
x ux x u==
1.0 0.5 0.5 1.0x1
1.0
0.5
0.5
1.0
x2
1.0 0.5 0.5 1.0F1
1.2
1.0
0.8
0.6
0.4
0.2
0.2F2
Points on F2 axis close to F1 axis are outside image.

Example 2
1 3 1
2 3 1
3 2
2 1
cos cossin sin
Notice that points on the axis close to axisare not in the image of the mapping.
x
x
x v x x udy v x x udt
x u
F F
θθ
θ ω
= = ⇔ = =

Notions of Solution for Discontinuous Dynamics
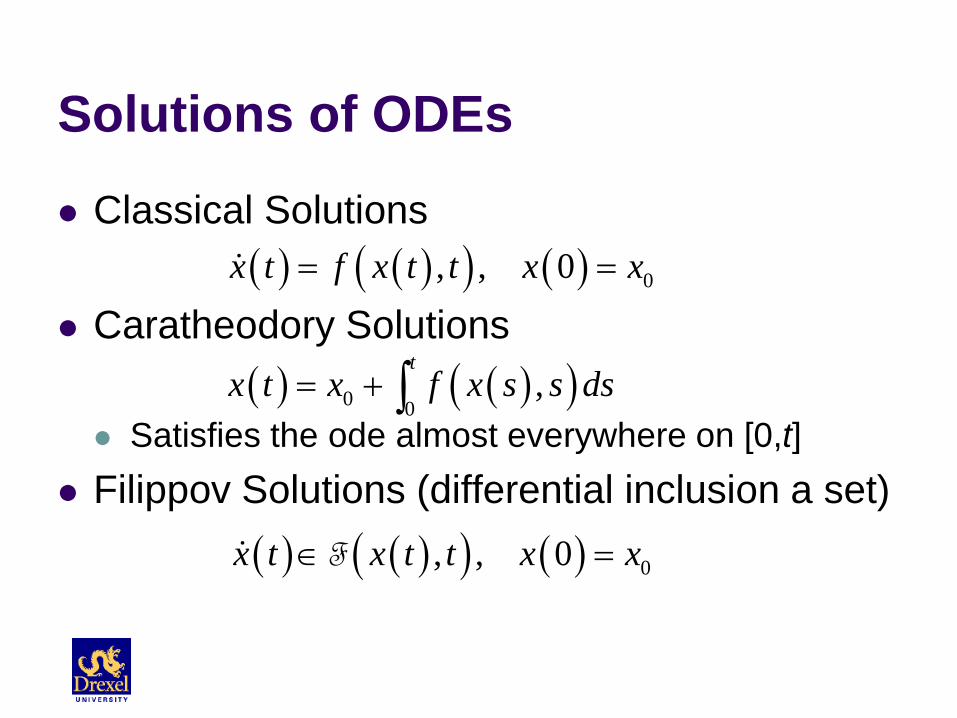
Solutions of ODEs
Classical Solutions
Caratheodory Solutions
Satisfies the ode almost everywhere on [0,t] Filippov Solutions (differential inclusion a set)
( ) ( )( ) ( ) 0, , 0x t f x t t x x= =
( ) ( )( )0 0,
tx t x f x s s ds= + ∫
( ) ( )( ) ( ) 0, , 0x t x t t x x∈ =F

Classical Solutions
( ) ( )( )( )
,
: is continuously differenticlassical solution able.
x t f x t t
x t
=
1 2 3 4t
0.2
0.4
0.6
0.8
1.0vtExample: brick on ramp
with stiction.sgn sinmv v cv mgκ θ= − − +
Not a classical solution
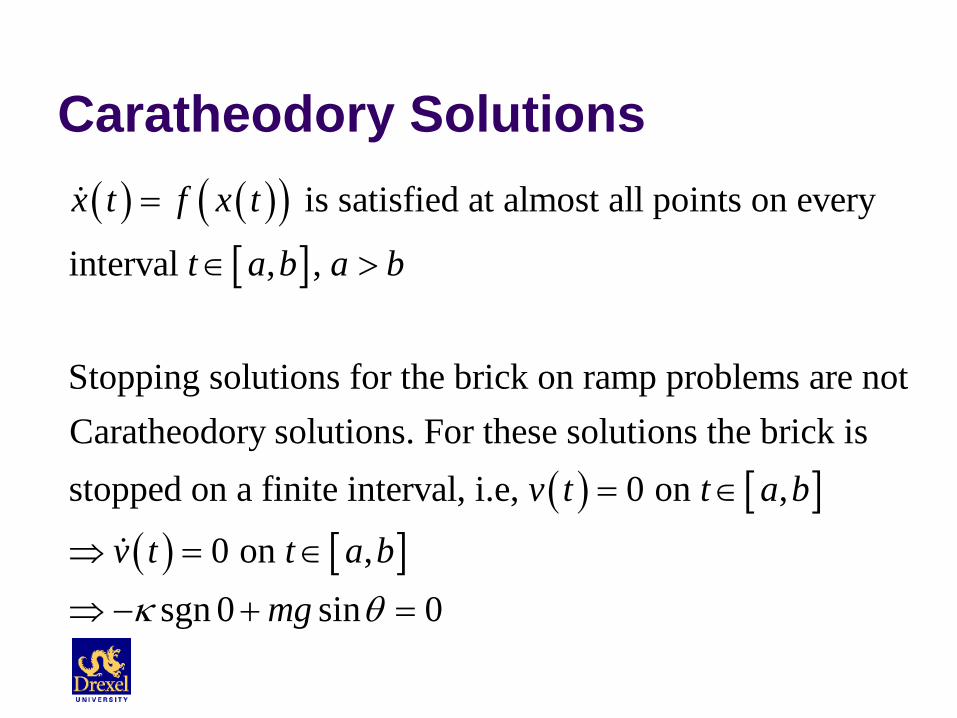
Caratheodory Solutions( ) ( )( )
[ ] is satisfied at almost all points on every
interval , ,
Stopping solutions for the brick on ramp problems are notCaratheodory solutions. For these solutions the brick isstopped on a finite
x t f x t
t a b a b
=
∈ >
( ) [ ]( ) [ ]
interval, i.e, 0 on ,
0 on ,sgn 0 sin 0
v t t a b
v t t a bmgκ θ
= ∈
⇒ = ∈
⇒ − + =

Brick Example – try something else
sgn sin
sgn sin
sin 0
sin , sin 0
sin 0
mv v cv mgcv v v g
m m
cv v g vm m
v g g vm m
cv v g vm m
κ θκ θ
κ θ
κ κθ θ
κ θ
= − − + ⇒
= − − +
= − − + >
∈ − + + =
= − + <

Filippov Solutions
0
( ) ( ( ), ) : conv ( ( , ( )) ( , ( )), )dx t x t t f S x t x t tdt δ
δ δ>
∈ = −ΛF
{ }}:),( δδ <−∈= xyRyxS n
( , ) : subset of measure zero on which is not definedx fδΛ
((

Example: nearest neighbor 3 agents moving in square
Q Rule: move diametrically
away from nearest neighbor
{ } { }{ }1 2 3
Nearest neighbor to
arg min , , \
Action
i
i i i
i ii
i i
p
p q q Q p p p p
pp
p
= − ∈∂ ∪
−=
−
N
N
N

Example: nearest neighbor, cont’d Consider 1 agent - in which case
the only obstacles are the walls. The nearest neighbor is easily
identified on the nearest wall. The vector field is well defined
everywhere except on the diagonals where it is not defined because there are multiple nearest neighbors.
11
1
p qpp q−
=−

Example: nearest neighbor, cont’d
( )
( )( )( )( )
2 1 2
1 2 11 2
2 1 2
1 2 1
0, 11,0
,0,11,0
x x xx x x
x f x xx x xx x x
− − < < − − < <= = < < − < < −
( )0 1
1 , 0 11 0
f α α α
∈ + − ≤ ≤

Extension of Brockett’s Condition
( )( )
( ) ( )( )
( )( )
Assumption on , :
convex , convex
conv , ,conv
: Admissible feedback controls are piecewise continuous andsolutions are defined in the sense of Filippov
,
m n
m
f x u
A R f x A R
A R f x A f x A
u x
x f x u x
⊆ ⇒ ⊆
∀ ⊆ ⊆
∈
Definition
F
( )( )
( )
and 0 0
(Ryan): For , continuous and satisfying assumption, asymptoticstabilization by discontinuous feedback each neighborhood
of 0 , is a neighborhood of 0 .n m n
u
f x u
R f R R
∈
⇒
∈ × ∈
Theorem
F
B
B
![IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS…hgk22/papers/Kwatny Bahar... · Energy-Like Lyapunov Functions for Power System Stability Analysis ... Bergen and Hill [8], ... 1142 IEEE](https://static.fdocuments.net/doc/165x107/5b6682047f8b9a1f738d126b/ieee-transactions-on-circuits-and-hgk22paperskwatny-bahar-energy-like-lyapunov.jpg)








