Vanderbilt Universityresearch.vuse.vanderbilt.edu/srdesign/2005/group9/Group_9___FINAL.… ·...
41
Vanderbilt University Department of Biomedical Engineering BME 273 Automated Maze System Development Group 9 Samar Shah (BME) Tanvir Haque (BME) Siddartha Sanathanamurthy (EE) Advisors: Dr. Herbert Y. Meltzer, Department of Psychiatry Dr. Paul King, Biomedical Engineering
Transcript of Vanderbilt Universityresearch.vuse.vanderbilt.edu/srdesign/2005/group9/Group_9___FINAL.… ·...

Vanderbilt University
Department of
Biomedical Engineering
BME 273
Automated Maze System Development
Group 9 Samar Shah (BME) Tanvir Haque (BME) Siddartha Sanathanamurthy (EE)
Advisors: Dr. Herbert Y. Meltzer, Department of Psychiatry
Dr. Paul King, Biomedical Engineering

ABSTRACT One of the simplest tests for examining memory in animals is the rat maze. A group in
the Department of Psychiatry is interested in the effects of certain drugs on memory. By
using a process called microdialysis, the group is able to study drug distribution within
the animal's body. In order to obtain data pertinent to memory effect, the machine must
be attached to the rat continuously. The problem that arises with the experiment is the
burden that the dialysis machine presents. As the rat runs through the maze, it is up to the
researcher to ensure that tubes do not get tangled against maze walls, and that the rat
cannot sense the presence of the overhead machine. Thus, he must manually guide the
machine through the course of the maze. It is the objective our group to propose a design
for a fully independent module that facilitates the researchers' study. In order to perform
such a task, three objectives must be met: a means of sensing the rat's position, a means
of moving the dialysis machine, and a way to communicate the imaging system's position
information to the drive mechanism. Our design involved using a standard web cam to
locate the rat's position, a written LabVIEW script to calculate distance change, a lead
screw drive mechanism to translate the dialysis machine, and a microcontroller to
communicate between the latter two. Due to budget constraints, however, we could not
fulfill the original intentions of our design. As an alternative, we developed theoretical
models to test the principles of both our imaging system and our drive mechanism.
Although no tangible design will be developed, a better understanding of image
acquisition systems, processed information from microcontrollers, and mechanical
principles of linear actuators was obtained. With the development of the two theoretical
models, the perceived design was realized and will be used for educational purposes.
1

INTRODUCTION
Research in pharmaceutical drug development involves a battery of testing,
particularly in animals. In the case of studies pertaining to drug effects on memory
cognition, a common experiment involves the use of a lab rat within a maze. Food is
designated as the prize for each run, and thus the motivation behind every decision. By
making the rat run through the maze multiple times, the rat will base its decisions on his
memory, in hopes of achieving its ultimate goal: food. Dr. Herbert Meltzer's lab in the
Department of Psychiatry is using the method to study the effects of schizophrenic drugs
on the cognitive centers of the brain. His group is interested in analyzing the
neurochemical processes that accompany the concept of memory. In doing so, he hopes
to apply his findings to the biochemistry of schizophrenics, eventually producing drugs
that will help restore proper chemical ratios. To facilitate "study of drug distribution,"
the group uses a process called microdialysis, where neurochemical samples are
continuously collected from certain regions of the brain, and then analyzed for chemical
content1. Through this analysis, the researchers will know what types of
neurotransmitters are being affected by the introduction of the drug.
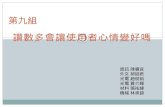
The challenges faced by the lab include the physical limitations imposed by the
apparatus of the
microdialysis machine,
shown in Figure 1. The
machine is roughly a
square foot in area, and
weighs 2 pounds. Two tubes are implanted within a rat's skull into the prefrontal cortex - Figure 1 Dialysis machine from lateral view
2

one delivering dialyzing fluid, the other removing the fluid and eventually leading to a
collecting duct. These tubes each measure a maximum of 36 inches in length, and both
are directly attached to a dialyzing unit. Because the acquisition of samples requires a
fixed connection during the task, the rat must be continually be attached to the machine
via the tubes, depicted in Figure 2, even as it runs through the maze. The maze itself is a
radial 8-arm maze, and can be seen in Figure 3. Each arm spans 20 inches, while the
central area is 11 inches in diameter. The depth of the maze is 18 inches. To maintain
the integrity of the experiment, it is up to the researcher to manually guide the machine
throughout the maze, to match the rat's path and
speed. Not surprisingly, these imposed limitations
causes problems for the researchers. First, the
tubes connecting the rat to the machine often
times get tangled, and caught on the corners of the
maze wall. Secondly, the researcher must be
extremely careful not move the machine within
the perception field of the rat – that is, it is
imperative that the rat not sense the presence of
the machine, as it can have serious psychological repercussions, and thus affect the purity
of the collected sample. Finally, it often proves cumbersome for the researcher to have to
occupy himself with the guidance of the machine. If the process was somehow
automated, the researcher would be free to do other things during the experiment.
Figure 2 Rat hooked up to a microdialysis machine
3

4
Our goal is thus to eliminate these problems posed by the experimental setup.
Our design should provide a self sustaining module that will facilitate the researcher's
study. As explicitly plotted in the process diagram, (Appendix 2), the entire procedure
should be replicated within our module, and also automated as an open loop system.
Thus, the rat can run through the maze without any assistance from the researcher, and
the entire experiment can be self sustaining.
The first task would be to identify where
the rat is in the maze, and determine if it
had moved. If so, the device needs to
calculate the change in position. Finally,
the device will communicate this change in
position to a type of drive system, which
will then translate the dialysis machine to
match the rat's new position. The process is
then repeated, and constrained to a looped system. In order to perform such a task, three
things are needed: a means of sensing the rat's position, a means of moving the dialysis
machine, and finally, a way to communicate the imaging system's position information to
the drive mechanism.
METHODOLOGY
The methodology to obtain and process an image required that the camera was
calibrated to acquire clear and well resolved images. From there, the 16-bit image was
converted to an 8-bit image to make the processing more manageable and more robust.
The image was then filtered using color thresholding techniques. Lastly the image was
Figure 3 8-arm radial maze. For dimensions, see Appendix 1

pattern matched with a template to determine the center pixel value of the pattern we
were looking for, in our case a circle. This pixel value was then converted to a physical
coordinate value and outputted to the microcontroller.
The camera was calibrated based on the following image requirements:
resolution, pixel resolution, field of view, working distance, sensor size and depth of
field. The resolution, dependent upon the smallest feature size on the object that the
imaging system must distinguish, was determined to 1cm. This would be appropriate
because it would prevent small particles or patterns to interfere with the imaging system.
The field of view or the area of the object that the camera must acquire was determined to
be 20 inches by 20 inches. The working distance, or the distance from the camera lens to
object was determined to be 30 inches. The depth of field or the maximum object depth
that remains in focus was determined to be 6 inches, based on the rat’s height. Using
these variables, the lens focal length was determined by Equation 1:
Equation 1
and a spatial calibration process was applied to convert the pixel to a real-world unit
transformation while accounting for many errors inherent to the imaging setup2.
The Full Dynamic approach is used by NI Vision Assistant 8.0 software to
convert a 16-bit image to an 8-bit image. The minimum intensity value of the 16-bit
image is mapped to 0, and the maximum intensity value is mapped to 255. All other
values in the image are mapped between 0 and 255 using the equation shown below. This
mapping method is general purpose because it insures the display of the complete
dynamic range of the image3. Because the minimum and maximum pixel values in an
image are used to determine the full dynamic range of that image, the presence of noise
5

or defective pixels can affect the appearance of the image. IMAQ Vision uses the
technique summarized in Equation 2:
Equation 2
where z is the 8-bit pixel value, x is the 16-bit pixel value, y is the minimum intensity
value and v is the maximum intensity value.
Clustering thresholding technique was
used to filter the image. This technique sorts
the histogram of the image within a discrete
number of classes corresponding to the
number of phases perceived in an image4. The
gray values are determined along with a
barycenter is for each class. This process repeats, until it obtains a value that represents
the center of mass for each phase or class. This allows for the results to be obtained
regardless of the lighting conditions as well as the histogram values from the image.
From Figure 4 it can be seen that the clustering technique can be used to determine the
threshold pixel value (k) such that all gray-level values less than or equal to (k) belong to
one class 0 and the other gray level values belong to another class 1. The threshold value
is the pixel value (k) for which Equation 3 is true:
Figure 4: Image histogram where i represents gray level value, k represents the chosen threshold, h(i) – number of pixel values.
Equation 3
where μ1 is the mean of all pixel values that lie between 0 and (k), and μ2 is the mean of
all the pixel values that lie between k+1 and 255.
6

Pattern Matching was employed to detect and locate the center pixel value of a
specified pattern. Firstly, a template was created which represents the object for which
we were searching; in our case it was a dark circle. Pattern matching techniques include
normalized cross-correlation, pyramidal matching, scale- and rotation-invariant matching,
and image understanding. We focus our discussion on normalized cross-correlation
because it was the primary method used in pattern matching. Normalized cross-
correlation is based on a series of multiplication operations. MMX technologies are
employed by IMAQ Vision to find a template in an image5. Although the technology is
complex, the basic concept of correlation is as follows: Consider a sub-image w(x,y) of
the size K x L within an image f(x,y) of size M x N, where K ≤ M and L ≤ N. The
correlation between w(x,y) and f(x,y) at a point (i,j) is given by Equation 4:
Equation 4
where i= 0,1,…M-1 and j= 0,1…N-1, and the summation is taken over the region in the
image where w and f overlap.
From the above mentioned pattern matching technique, the center pixel value of
the pattern in determined by the IMAQ Vision program. This pixel value is then
converted to a physical coordinate value based on the calibration principles mentioned
above.
The crucial challenges associated with the design of the translational device was
to provide a means of movement that will be able to compete with the demands of the lab
rat, as well as the limitations of the experimental setup. The scope of the radial maze, as
stated above, includes 8 individual arms that measure 20 inches in length as well as a
7

central circular area 11 inches in diameter. Thus, the entire maze spans a total of 51
inches in diameter. Because the rat can travel the entire length of the maze at a minimum
time of 2 seconds, its top speed is roughly 2 feet per second. Keeping in mind the
limitations of the experimental setup, the length of the transmission tubing connecting the
rat to the dialysis machine could not exceed a length of 36" and still preserve the integrity
of the machine's collection mechanism6. The device should also protect the integrity of
the experimental setup in that it should introduce little to no experimental variables in the
psychological study. Factors affecting any of the cognitive senses, whether that is the
rat's visual perception of the overhead device or the tactile sensation of the moving
implanted tubing, can affect the rat's neurochemistry during the experiment.
In order to propel the dialysis machine across the enclosed area of the maze, we
needed to choose a translational drive mechanism. Common mechanisms include a
pulley/belt drive system, a lead screw drive, hydraulics, and geared systems. Using a
QFD plot, we chose to use a lead screw device, as it is relatively cheap to make, it
requires low maintenance, and also is relatively easy to work with (Appendix 3). A
schematic of the lead screw device is pictured in Appendix 5. To encompass the entire
two dimensional area of the maze, the translational device would consist of two different
lead screw arms, one for the x direction, and one for the y direction. The Appendix
depicts a bird's-eye view of the device (Appendix 10). The arms will then be supported
by an aluminum scaffold, as depicted in the Appendix (Appendix 4).
As the lead screw device is motor driven, we had to look at two different
parameters – rotational speed and torque. The rotational speed is dependent on the
modeled speed of the mouse as well as the pitch of the threaded rod being rotated.
8

Assuming a speed of around 2 ft/s, and then using a small common pitch of 2 revolutions
per inch, the rotational speed needed is 2880 RPM. Torque is dependent on the force
required to drive the load. The Force is calculated by Equation 57:
FT = Fa + FF Equation 5
where FT is the total force, FA is the force of acceleration and FF is the frictional force.
The Force of acceleration is governed by Equation 27:
FA = W/g + a/12 Equation 6
where W is the weight of the load, and a is the acceleration in in/s. To arrive at an
approximate acceleration, the mouse's movements were modeled as a worst case
scenario. Assuming that the rat runs continuously from end to end, its position is
modeled as a sine function, and the rate acceleration was determined by differential
calculus. The maximum weight that needs to be driven comes out to be around 16
pounds, while the acceleration is around 21.16 in/s. The frictional force is determined by
the coefficient of friction of the nut/screw system (.15) times the normal force of the load
(16 pounds). The torque needed is then calculated via Equation 37:
T = FT * (1/(2π*e*p)) Equation 7
where e is equal to the efficiency of the threaded rod (.4) and p is the pitch of the screw
(2 inches / revolution). The calculated torque finally came to around 750 g-cm. The
motors that we selected provide a torque of 816 g-cm and a speed of 3000 rpm. With the
selected motors, the dialysis machine would be able to be translated across all areas of the
maze, as the lead-screw drive would span the entire 51 inches of the maze.
The purpose of the microcontroller is to take the change in position according to
an image change from the LabVIEW software and convert it into a current waveform that
9

can be used by the driver and mechanical arm system. Choosing a microcontroller for
this operation proved to be quite logical. Since there were two systems from which to
choose, the sensor system and image acquisition system, there ended up being two types
for microcontrollers to use, the Motorola 68HC11E and the National Instruments PCI-
7342, each with their advantages and disadvantages.
The use of the Motorola microcontroller was optimal with the sensor system. The
advantages were the low cost, around $200, the on-board Analog to Digital converter and
the external independence from a computer. The disadvantages were the less calculating
capabilities resulting in a slower resolution, and less input ports8.
The use of the National Instruments microcontroller was optimal with the image
acquisition system. The advantages were the four 8-bit input ports, the available
processing capabilities and the software compatibility with the LabVIEW software. The
disadvantages were the relatively high cost, and the dependence of a computer since it is
an internal PCI card9. After meeting with Dr. Karsai of the Vanderbilt School of
Engineering, the decision to use a more advanced microcontroller to control the image
system was made. Ultimately, the National Instruments PCI-7342 microcontroller was
chosen since the image acquisition system was picked10.
The way the calculation process of the microcontroller described earlier works in
a simple way. The LabVIEW software will output a physical coordinate based on the
position of the target in pixels. Since the feed is in real time, the microcontroller will
constantly be given this physical coordinate from each frame. This will be anywhere
from 5-30 frames a second. The microcontroller will then take this coordinates (Xn ,Yn)
and compare it with the coordinate given previous (Xn-1, Yn-1). The comparison taken
10

will be the difference between the two coordinates. In other words, the distance from the
first coordinate to the second coordinate will be taken. This number will be rounded for
significant digits and converted into a pulsed waveform.
There will be two outputs from the microcontroller. One output for the change in
x-coordinate and one output for the change in y-coordinate. The waveform will be
predetermined based on testing how far the motor will translate the mechanical arm in a
given rotation. However, since the output current of the microcontroller will only be a
few milliamps, a current driver will be needed to obtain the amps needed. The driver will
be connected from the microcontroller and will feed into the motors translating the arm
through the maze.
RESULTS
Due to budget constraints imposed by the Department of Psychiatry, we could not
implement our design into a workable, final model. According to a correspondence with
Dr. Adam Prus, of the Department of Psychiatry, the decision to go forward with the
project ultimately came down to "the cost of the project vs. the number of experiments
that [the group] anticipate[s] this maze to be used for." Because "current methods of
combining microdialysis and behavior are far more rudimentary than what [we]
designed," the department held that "the current techniques [would] be sufficient." . For
the complete correspondence between our group and the department, please see
Appendix 14. In order to qualify the integrity of our design, we decided to develop
theoretical models to represent the basic principles of our design. The first would be a
model involving the workings of our image acquisition system. The second would
reproduce the operation of the lead screw device.
11
11
11

12
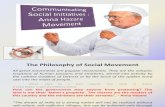
The image acquisition
program performed all the tasks
described above and thus
successfully tracks the movement
of the specified object in real
time. In order to examine our
script, we developed a test to
model the degree of contrast of
marking versus its background.
To represent the contrast between a marking and a white rat, the software was told to
locate a black circle against a white background as shown in Figure 5. The figure shows
a screen shot of the LabVIEW software program which is set to determine where the
circle is in the image. The tables to the left outputs the pixel values of the center of the
circle in a coordinate form. The X and Y axes start at the top right corner of the image.
Thus we have successfully demonstrated that the image acquisition program can track, in
real time, a previously specified pattern.
To test the theoretical principles of our lead screw mechanism, a scaled model of
our design was
constructed. The
parts used included a
3V DC motor
acquired from an
erector set, a 1 foot 8-
Figure 5: LabVIEW screen shot of image acquisition program set to determine the circle in the image and output the pixel value in the table towards the left in the screen-shot. LabVIEW Code in Appendix 18
Figure 6 Lead Screw theoretical model

32 threaded rod, an 8-32 nut, and various scaffolding parts from the aforementioned
erector set. Figure 6 shows the assembled device.
In running tests on the device, we found several design concerns that deserve
attention. The first regards the integrity of the rod itself. Slight bends or imperfections
may cause stoppage of the nut's carriage through the rod. These stoppages could prove to
be fatal to the arm's operation, and thus extra care should be given to ensure that the rod
is free of kinks. However, the prevalence of these imperfections decreases as the
thickness of the rod increases. Because we were working with such a small model of the
screw (diameter roughly equals 4 mm), the rod was more prone to developing flaws.
Secondly, we found that any debris on the surface of the rod would also hinder the nut's
movement. The rod should therefore be cleaned properly to avoid stoppage. We found
that a slight application of lubrication, such as WD-40, prevents many instances of
stoppage, however, does not eliminate stoppages completely (those caused by kinks).
Therefore it is imperative that the rod is well lubricated before use.
The total market for cognitively effective antipsychotic drugs (ADP) is about 12
billion dollars. Out of which about 3 billion dollars a year is spent on research
development. Bottom line profit for the industry is about 10% or about 1.2 billion dollars.
Current automated maze models cost from $30,000 to $50,000. Assuming that out of the
3 billion dollars spent on development, about 1% is spent on automated mazes, then
about 1,000 mazes are bought each year just for ADP development. This estimate is quite
conservative because institutional buyers are not included in the estimate and because
mazes used for other types of research and development are not included. Although we
do not have specific figures we could conservatively estimate at least 100 mazes sold to
13

institutional buyers a year. Thus, we set our market cap at 1,100 mazes sold per year and
a total market cost of about $55 million per year if buyers are willing to pay $50,000 per
maze. Our primary market would be commercial ADP developers, followed by
institutional buyers.
The total cost of our project is about $4,000
for just the parts and software; this does not include
development costs such as labor, training, repair and
other consulting costs. Table 1 shows the general
breakdown of costs based on four primary systems
including: scaffolding, mechanical arm,
microcontroller and the imaging software. Given the completed, prototyped, and tested
design for this system, it would take three engineering student fifty hours total to build
the complete system. At a wage rage of $15/hour, the total labor cost of building the first
automated maze system would be $750. Therefore the total development cost would be
$750. The specific cost breakdown for the components for each device is given in
Appendix 11.
Budget Support Scaffolding 99.70 Mechanical Arm (Including driver electronics) 1527.02 Microcontroller 895 Imaging Software 1,355.00 Grand Total 3876.72
Table 1: A general breakdown of costs based on the four primary systems
The cost of maintenance in the system would include re-calibrating the camera if
it becomes dismounted or loses focus due to excessively rugged use. Another cost could
be replacing the motors if they stop working. These costs would include travel expense
for an on-site visit, which would vary; and 3 hours of labor cost. The total cost of
maintenance would $45 not including travel costs.
The overhead cost for this device for sale to the manufacturer is $4,676.42, which
is the total cost (including labor) for the first production of the system. Marketing costs
14

would include talking with different companies and selling the system to them. This
would include traveling costs, advertisement costs and costs to upkeep a website. We
estimate these costs to be $2,000 not including travel. Distribution costs would include
shipping the product to the customer and travel costs to setup the system. We estimate
$1,000 towards distribution costs not including travel.
The rugged design and construction of the system will allow the use of this
system for at least five years. Some parts such as the motors or the lead screw may need
replacement due to normal wear and tear and frequency of use. With further development
the system will only become more robust and more stable. We estimate a minimum life
cycle of five years.
The projected market price for the product is $50,000 based on similar automated
maze system sold currently. Thus our product would be competitively priced at $45,000.
Unlike the systems currently available in the market, ours is completely customizable and
is easily convertible and thus can be used in various different types of experiments. Thus
we have a competitive advantage in terms of pricing, expandability and service. The total
cost of the system including parts, labor, marketing costs and distribution costs is
$7,676.42. This gives us a bottom line profit of about $37,000. Based on these estimates
we have a profit margin of about 20%. We believe that because of our competitive
advantage, we would be able to control at least 50% of the market share within two years.
This would mean that in two years we would sell about 500 mazes at the cost of $45,000.
A profit margin of 20% would give us a bottom line profit of $4.5 million within two
years.
15

One of the main goals of this design is to allow experiments to take place without
any interference or physical guidance of the experimenter. With this in mind, the safety
of the experimenter is ensured since there is minimal contact with the design.
Furthermore, another goal of the design is to avoid entanglements of the tube feeding,
which is connected to the rats head, around corners of the maze. Since the microdialysis
machine will theoretically be constantly above the rat and the rat will always be in one of
the corridors of the maze, there should be no entanglements due to the corners of the
maze. Thus, the safety of the rat from our design is guaranteed.
The benefits of the design are apparent because of the goals set up from the start.
The researchers will be able to conduct other experiments while the rat is progressing
through the maze. They will also be able to monitor the rat from a computer away from
the area of the maze ensuring the best cognitive responses of the rat with minimal
environmental changes. Furthermore, since the dialysis machine will constantly be over
the rat, the environment of the rat will be consistent leading to better cognitive results.
The FDA uses the regulations from the National Research Council in order to
determine proper animal and human considerations for this particular research12. The
regulations that apply to our design involve two different areas. The first one is the
treatment of the rat in the radial maze and the second is the microdialysis aspect. Our
physical design adheres to the FDA considerations of both areas. One of the techniques
used to encourage the rat's curiosity is food deprivation. Rates are food deprived to get
the appropriate response for a food reward. Animals are weighed daily and are not
allowed to have their weights fall below 85% of their free-feeding weight (the weight
before food deprivation). Furthermore, with this set up, the rat is the lowest level species
16

that can be used in this model. The maze is cleaned between sessions and is built using a
non-porous material. The cage where the rat's are housed is cleaned daily. The rats are
inspected daily by Vanderbilt's Department of Animal Care with veterinarians on call
24/7. Since the rats are social animals, they are housed in groups, except after the
microdialysis surgery in order to taper infections. Furthermore, the housing facility for
the rats are cleaned routinely and ventilated properly12.
For the microdialysis aspect of the project, the surgeries are conducted under
aseptic conditions in order to reduce infections. Additionally, the probes are sterilized to
further reduce infection. As a side note, microdialysis is only used on animals, so human
considerations of this aspect are not needed. If the rats need to be killed, an anesthetic
overdose, which is recommended by the FDA and the National Veterinary Council, is
used. The procedure allows the assessment of regional neurotransmitter release, which
currently cannot be conducted on humans. This procedure allows for the testing of
therapeutic drugs that are not yet approved for use with humans due to efficacy and
safety concerns12.
CONCLUSION
Overall, this research will allow for the correlation between neurotransmitter
release and memory performance and will allow for the testing of any
pharmacotherapeutics that may have relevance for treating cognitive impairment in
humans in diseases such as Alzteimer's and Schizophrenia. These are common methods
for evaluating potential drug therapies prior to being administered to humans.
The budget sent to the advisors of our senior design proved to be a sticking point for the
project. Due to departmental reconsiderations in the psychiatric department, the funding
17

to build our design was not given11. According to the advisor, before our design could be
realized, an assessment of microdialysis in an alternative behavioral model needed to be
completed. Additionally, since the experiment set up and the data obtained were rather
rudimentary, using a complicated system such as the image acquisition system to gather
this type of information was considered overkill. Additional suggestions of applications
of our design were offered, however, the budget limitations proved to be too much for the
psychiatric department to overcome. Ultimately, our design, though considered valuable
by the psychiatric department, was not approved.
Although the actual design was not constructed, two theoretical models were
developed in order to demonstrate the fundamental principles of the design. The first
model is a demonstration of the image acquisition system using the LabVIEW software.
The demonstration shows the capabilities of the LabVIEW software obtaining an image,
isolating the image, determining the pixel coordinate, and converting to a physical
coordinate. All of this will be accomplished in real-time. The second model is a
demonstration of the mechanical arm and motor system. This model will be 1/5 scaled to
the actual design size. The system is constructed from Erector set materials and two
Erector set motors. With this model, the platform can be translated along the X and Y
coordinates exactly the way it would if it were the actual design.
Though no tangible design will be developed, a better understanding of image
acquisition systems, processed information from microcontrollers, and mechanical
principles of linear actuators was obtained. With the development of the two theoretical
models, the perceived design was realized and used for its educational purposes.
RECOMMENDATIONS
18

The sensor system's advantages are the independence from a computer, the
relatively lower cost of the system, and the low processing requirements. Along each
arm of the 8-arm radial maze, 5 IR detectors would be used with 5 IR emitters. Detecting
the center of the maze proved to be challenging. Normal IR detectors would not be
sufficient in this area because of the numerous crossings in that area which would make
the position of the rat difficult to determine. In order to get a proper reading of the
center, piezo sensor strips would be implemented. There would be 8 piezo sensor strips
connected to each other making a circle 5-6" away from the center of the maze.
All of these sensors would be connected to filter circuits. This would eliminate
the unwanted objects from detection and only allow the physical body of the rat to be
detected. The signals from these filters would then be connected to an analog to digital
converter. This conversion is necessary so the microcontroller can use this information
for its computation. The signal is then connected to the microcontroller. The Motorola
68HC11E has an analog to digital converter on board8 . The microcontroller would have
a predetermined table set up with different coordinate combinations. Each combination
would take into consideration the sequential steps the microprocessor would need to take
in order to translate the mechanical arm system when each sensor is set off. Each step
would have an x-coordinate and y-coordinate associated with it. These would be fed into
the driver, amplified, and fed into the motors to drive the mechanical arm system10.
The sensor system would not be independent from the maze. Each sensor would
be physically connected to the maze. They would have to stay there permanently in order
for the table set up in the microcontroller to work. If a new maze were to be used, a new
19

sensor system as well as a new table for the microcontroller would both need to be set
up10.
After review of the lead-screw device, it may be reasonable to explore other
alternatives. Due to issues such as nut carriage stoppage, and load related speed-
dampening, the lead screw device may not be as reliable as perceived. These problems,
however, can be avoided with the use of more powerful motors. Nevertheless, if price is
not an issue regarding budgeting, it may prove worthwhile to invest in a belt drive
system, as it is less prone to stoppages, and provides superior accuracy in terms of
carriage placement. If one were to still venture into the lead screw realm, there is another
alternative that uses the same principles. A company called Roh'lix developed a
threadless linear actuator that converts rotary energy to linear motion. Instead of using a
threaded rod, the Roh'lix actuator uses a polished rod to run through. With the absence of
threads, the frequency of stoppages is dramatically reduced, as friction is minimized.
However, with the reduction of stoppage frequency comes a slight loss in accuracy as
well as resolution, as the device is prone to slippage. The Roh'lix device, however,
deserves consideration for a project on somewhat of a limited budget. While the lead
screw device will work for the designed application, it may be easier as well as more
convenient to set up an alternative mechanism.
References 1 Hodht C, Opezzo AW, Taira CA. Microdialysis in Drug Discovery. Current Drug
Discovery Technologies. 1:269-285 2004 2 "System Setup and Calibration." IMAQ Vision Concepts Manual. National Instruments 2005. 3 "Image Processing and Analysis." IMAQ Vision Concepts Manual. National Instruments 2005
20

4 "Thresholding." IMAQ Vision Concepts Manual. National Instruments 2005. 5 "Pattern Matching." IMAQ Vision Concepts Manual. National Instruments 2005. 6 Prus, Adam. Personal interview. 8 Dec 2005. 7 "Drive Mechanisms" Techno Isel H830 Catalog. Techno Isel.11-16. 2006
<http://www.techno-isel.com/Tic/H830/PDF/H830P011.pdf> 8 "Motorola 68HC11E." Family Data Sheet. 2005. Freescale Semiconductor. 20 Feb.
2006 <http://www.freescale.com>. 9 "NI PCI-7342." Datasheet. Nov 2005. National Instruments. 20 Feb. 2006
<http://www.ni.com>. 10 Karsai, Gabor. Personal interview. 11 Feb 2006. 11 Prus, Adam Ph. D. "Next Steps." E-mail to Samar Shah. 15 2006. 12 "Guide for the Care and Use of Laboratory Animals." 1996. National Research
Council. 10 Apr. 2006 <http://www.nap.edu/readingroom/books/labrats/chaps.html>.
13 "Rats and Mazes" Rat Behavior. 2004. 08 November 2005
<http://www.ratbehavior.org/RatsAndMazes.htm>
21

Appendix 1
Appendix
Maze Dimensions13
Depth = 18"

Appendix 2
Process Diagram
Operate Transport Store Idle
Identify Rat Position
Compare to Previous Location
Calculate Change in Position
Convert Image Space Coordinates to Physical Coordinates
Convert Physical Distance to Rotational Distance
Power Motor for set Revolutions
Translate Dialysis Machine

Appendix 3
QFD Plot
Lead Screw
Drive Belt
Hydraulics
Gear Rail
Quality Methods Weight
Precision + ++ ++ 5
High Speed + ++ ++ + 5
Low Cost ++ - - - 3
Low Maintenance + - 2
Durability + + + 3
Large-Scalability + + - 5

Appendix 4
Box Scaffolding

Appendix 5
Lead Screw Device

Appendix 6
Threaded Rod
The threaded rod will span the entire length of the maze (51") and will have a
pitch of 2 revolutions / inch. They have a bore diameter of 3/8".
Guide Rod The guide rod will counter act the motor's generated moment and provide a linear
guide for the translation of the block.
Coupling
The couplings will connect the motor to the threaded rod, so that the motor's
torque will be transferred to the screw. Couplings will also be used to transfer the
motor's rotational energy to the optical encoders.
Optical Encoders Optical Encoders will be used to count the number of revolutions that the motor
turns per command. The encoders will feed into the microcontroller so that position may
be monitored
Linear Bushing (not pictured)
Linear bushing acts as a friction minimizing guide for the block along the guide
rod.
Linear Block
The linear block is an end support for the guide rods used in the design.
Threaded Nut
The threaded nut will be welded onto the block so that the screws rotation will be
converted to linear motion
Crowned Roller Rail (not pictured) The rail will act as a counter balancing support as well as a friction reducing
guide for the mechanical arm dimension traversing the maze.
Roller Bearing (not pictured)
The roller bearing is the wheel that will run within the rail.
End Stop (not pictured)
The end stops will prevent the wheel from escaping the two ends of the railing
system
Machined Items
A total of 5 blocks will need to be machined due to the dimensions of the various
components needed. The schematics for each are shown below

Appendix 7
Block 1 – will support block 2 as well as dimensional arm
Block 2 – will support dialysis machine and camera

Appendix 8
Angle Bracket – 2 needed
Support Block – will be mounted with wheel to run with rail system

Appendix 9
Overall Schematic

Appendix 10
Transverse View13

Software for Image Acquisition From Labview Vendor Item Quantity Price Labview Software 1 $2,900 $2,900 Vision Development Module 1 $2,400 $2,400 Academic Discount (75%) 1 $3,975 $3,975 Total $1,325 Parts for Image Acquistion USB WebCam 1 $30 $30 Total $30 SUBTOTAL A $1,355 Microcontroller Costs From LabView Vendor Item Quantity Price NCI PCI 7342 1 $895 $895 Total $895 SUBTOTAL B $895 Mechanical Arm Parts From mscdirect.com ORDER # Item Quantity Price
01206986 6 ft Stainless Steel Threaded Rod (3/8" dia. 8 thread, 4 stop) 2 $70.38 $140.76
85273381 Gray Iron Nut 2 $23.21 $46.42 35538280 Precision Steel Ball Bushing Bearing 2 $41.09 $82.18 02730349 Stainless Steel Retaining Ring 4 $8.31 $33.24 60038288 5 ft Hollow Steel Rod 1" 2 $192.16 $384.32
Appendix 11

35523018 Linear Shaft Support Block 4 $34.10 $136.40 6 ft Crowned Roller Rail 1 $52.24 $52.24 Roller Bearing 1 $17.42 $17.42 End-Stop 2 $2.76 $5.52 Total $898.50 From Jameco 237403CE Motors 2 $25.95 $51.90 1323942CE Motor Driver 2 $149.95 $299.90 Total $351.80 From Automationdirect.com Optical Encoder 2 $81.50 $163.00 Total $163.00 From Rocom Coupling - 5 mm to 3/8" 2 $15.93 $31.86 Coupling - 6 mm to 3/8" 2 $15.93 $31.86 Total $63.72 Scaffolding Parts From Home Depot Item Quantity Price 6 ft Angle Bracket Aluminum Bar 2 $13.27 $26.54 6 ft Flat Bracket Aluminum Bar 4 $6.97 $27.88
Appendix 12

4 ft Angle Bracket Aluminum Bar 4 $7.17 $28.68 4 ft Flat Bracket Aluminum Bar 2 $5.57 $11.14 5/16" Hex Bolt 16 $0.13 $2.08 5/16" Washer Bag (25 count) 1 $1.80 $1.80 5/16" Nut Bag (25 count) 1 $1.58 $1.58 Total $99.70 Machining Costs Total approx $50 SUBTOTAL C $1,626.72 GRAND TOTAL $3,876.72
Appendix 13

Date: Wednesday, March 15, 2006 10:16 AM -0600 From: "Prus, Adam J" <[email protected]> To: "Shah, Samar Kulin" <[email protected]> Subject: RE: Next Steps I just received word from Dr. Meltzer about the final decision on the radial arm maze project. Everyone was very impressed with your designs and ideas, but in the end, it came down to the cost of the project vs. the number of experiments that we anticipate this maze to be used for. Current methods of combining microdialysis and behavior are far more rudimentary than what you designed, but for our own current goals, the current techniques will be sufficient. This is not to say that what you designed may not be of great interest to other laboratories, especially in the future, when these combined experiments become more common place. In other words, your work was by no means a worthless endeavor and I would urge you to hang on to your ideas and plans for a possible profitable implementation in the future. It was a joy to work with you and please let us know how we can help with any evaluations, etc., that you may need for completing this course. Regards, Adam Adam Prus, Ph.D. Research Fellow Department of Psychiatry Vanderbilt University 1601 23rd Ave. south, Suite 306 Nashville, TN 37212-8645 Email: [email protected]: (615) 327-7241 Fax: (615) 327-7093 __________________________________________________ From: Shah, Samar Kulin [mailto:[email protected]] Sent: Tue 3/14/2006 9:54 PM
Appendix 14
http://us.f605.mail.yahoo.com/ym/[email protected]&YY=81710&order=down&sort=date&pos=0&view=a&head=b
http://us.f605.mail.yahoo.com/ym/[email protected]&YY=81710&order=down&sort=date&pos=0&view=a&head=b

To: Prus, Adam J; [email protected]; Sanathanamurthy, Siddartha; [email protected]; King, Paul H Subject: RE: Next Steps Hi Adam, We did not hear from you, so we are still wondering about the status of the project. We are approaching a time when its too late to develop the project and finish it in time. Thus we are currently working with our BME adviser to develop an alternative educational project. Please keep us posted, if the status of the project changes; but as of right now, we are devoting all our time in the development of the educational module. Samar Shah --On Thursday, March 02, 2006 11:15 AM -0600 "Prus, Adam J" <[email protected]> wrote: > __________________________________________________ > From: Shah, Samar Kulin [mailto:[email protected]] > Sent: Wed 3/1/2006 3:15 PM > To: Prus, Adam J; Shah, Samar Kulin; Haque, Tanvir Rezwan; > [email protected]; Sanathanamurthy, Siddartha; Dai, Jin > Subject: Re: Next Steps > > > > Hi, > Hope you are doing well. I was wondering if you had a > chance to > discuss the project with Dr. Meltzer and if the project time line > was in adequate detail. We are waiting on your decision, and eager > to hear from you. > > Thanks, > > Samar > > --On Wednesday, February 15, 2006 8:47 AM -0600 "Prus, Adam J" > <[email protected]> wrote: >
Appendix 15
http://us.f605.mail.yahoo.com/ym/[email protected]&YY=81710&order=down&sort=date&pos=0&view=a&head=b
http://us.f605.mail.yahoo.com/ym/[email protected]&YY=81710&order=down&sort=date&pos=0&view=a&head=b
http://us.f605.mail.yahoo.com/ym/[email protected]&YY=81710&order=down&sort=date&pos=0&view=a&head=b
http://us.f605.mail.yahoo.com/ym/[email protected]&YY=81710&order=down&sort=date&pos=0&view=a&head=b

>> >> >> Jin and I had a meeting with Dr. Meltzer yesterday afternoon. >> Dr. Meltzer was very impressed by your project designs and ideas >> and plans to say so on any kind of evaluation forms he will fill >> out for your project. However, he did not see an urgency in >> beginning the construction of this work at the current time and >> would first like to see an assessment of microdialysis in an >> alternative behavioral model. While the project is affordable, >> it is a bit too expensive to invest in while other options may be >> available. The alternative model (novel object recognition >> test), I should point out, has not been as thoroughly evaluated >> as the radial arm maze and may not produce useful results. Upon >> determination of this, he would then give a final decision on >> going ahead with the project. >> >> What was not clearly known at this meeting was the amount of time >> it would take to complete your project. I think it would be >> helpful to have a time line (just estimate and not too much >> detail) on the construction of your assembly, assuming you had >> everything you needed to begin (i.e., don't worry about shipping >> time, for example). If you can provide this to me, preferably >> soon, then I will try to get a clear decision on the continuation >> of this project. >> >> Thanks, >> >> Adam >> >> >> Adam Prus, Ph.D. >> Research Fellow >> Department of Psychiatry >> Vanderbilt University >> 1601 23rd Ave. south, Suite 306 >> Nashville, TN 37212-8645 >> Email: [email protected]>> Phone: (615) 327-7241 >> Fax: (615) 327-7093 >> >> >> >> __________________________________________________ >> From: Shah, Samar Kulin [mailto:[email protected]] >> Sent: Mon 2/13/2006 3:54 PM
Appendix 16

>> To: Prus, Adam J; Haque, Tanvir Rezwan; [email protected]>> Cc: Sanathanamurthy, Siddartha; Dai, Jin >> Subject: Project Outline >> >> >> >> Hi, >> This PDF contains all the information regarding the >> project. It >> outlines the image system, the microcontroller, the scaffolding >> and >> the mechanical arm. It also includes the costs breakdown of each >> part and the whole system. >> I have put in an order for the LabView Software, and I >> will let >> you know as soon as it becomes available. >> In the mean time, if you want a video of how the software >> works in >> real time or if you have any questions, please feel free to >> contact >> us. >> >> --------------------------------------- >> Shah, Samar Kulin >> Vanderbilt University >> Email: [email protected]> > > > --------------------------------------- > Shah, Samar Kulin > Vanderbilt University > Email: [email protected]>
Appendix 17
http://us.f605.mail.yahoo.com/ym/[email protected]&YY=81710&order=down&sort=date&pos=0&view=a&head=b

Labview Code
Appendix 18

Program Screen Shot
Appendix 19