V Seminário da Pós-graduação em Engenharia Mecânica€¦ · Na figura 1.1, há um esquema de...
15
V Seminário da Pós-graduação em Engenharia Mecânica CAOS E CONTROLE DE MICROVIGA EM BALANÇO DE UM MICROSCÓPIO DE FORÇA ATÔMICA, OPERANDO EM MODO INTERMITENTE, NA RESSONÂNCIA Kleber dos Santos Rodrigues Aluno do Programa de Pós-Graduação em Engenharia Mecânica – Unesp – Bauru Prof. Dr. José Manoel Balthazar Orientador – Departamento de Matemática Aplicada e Computacional – Unesp – Rio Claro RESUMO Desde 1986, quando Binnig et al (1986) criaram o microscópio de força atômica (AFM), esse aparelho se tornou um dos mais importantes microscópios de varredura (SPM), sendo usado para análise de DNA, nano tubos, etc. (Rützel et al, 2006). O AFM tem como componente principal uma microviga, com uma ponteira em uma das extremidades, que vibra próximo de sua frequência de ressonância para mandar sinais a um fotodetector que traduz esse sinal e gera as imagens da superfície da amostra. O modo de operação tapping é o mais usado e o comportamento caótico é muito comum nesse modo de operação, por esse motivo, AFM se tornou um assunto muito interessante no mundo científico. Nesse trabalho, a microviga é modelada usando a equação de Bernoulli, enquanto que as interações entre ela e a amostra são modeladas usando o potencial de Lennard Jones. Simulações numéricas detectam movimento caótico no sistema e a necessidade de estabilizá-lo nos leva a usar os seguintes métodos: Método do Balanço Harmônico, sincronização de sistemas não lineares, método das equações de estado dependentes de Riccati (SDRE), método de realimentação atrasada. Por fim, a aplicação dos métodos se mostra eficiente, com pequeno erro e fácil aplicação. PALAVRAS-CHAVE: Caos, Microscopia De Força Atômica, Ressonância, SDRE, Sincronização, Realimentação Com Sinal Atrasado. 1 INTRODUÇÃO Desde sua criação, em meados do século XV, os microscópios sofreram enorme evolução e recentemente uma das áreas da microscopia que mais se desenvolveu foi a microscopia por varredura (SPM). Seu início se deu no ano de 1981, quando Gerd Binnig e Heinrich Rohrer, dois pesquisadores, a serviço da IBM Suíça, inventaram o Microscópio de Tunelamento (STM), que é capaz de analisar e manipular amostras de tamanho atômico (IEEE Global History Network, 2010). Após essa invenção, outros tipos de microscópios de varredura foram desenvolvidos, tais como Microscópio de Força Atômica (AFM), o Microscópio Óptico de Campo Próximo (SNOM), entre outros. Esse tipo de microscópio funciona basicamente com uma sonda guiada por um braço robótico sobre a superfície de uma amostra microscópica (Tusset e Balthazar, 2010). Neste trabalho estuda-se o Microscópio de Força Atômica (AFM), que usa como braço robótico uma microviga, de aproximadamente 449μm e uma sonda em sua ponta livre com aproximadamente o tamanho de um átomo (Bowen e Hilal, 2009). No AFM, existem três
Transcript of V Seminário da Pós-graduação em Engenharia Mecânica€¦ · Na figura 1.1, há um esquema de...

V Seminário da Pós-graduação em Engenharia Mecânica
CAOS E CONTROLE DE MICROVIGA EM BALANÇO DE UM MICROSCÓPIO DE FORÇA ATÔMICA, OPERANDO EM MODO INTERMITENTE, NA RESSONÂNCIA
Kleber dos Santos Rodrigues Aluno do Programa de Pós-Graduação em Engenharia Mecânica – Unesp – Bauru
Prof. Dr. José Manoel Balthazar
Orientador – Departamento de Matemática Aplicada e Computacional – Unesp – Rio Claro
RESUMO Desde 1986, quando Binnig et al (1986) criaram o microscópio de força atômica (AFM), esse aparelho se tornou um dos mais importantes microscópios de varredura (SPM), sendo usado para análise de DNA, nano tubos, etc. (Rützel et al, 2006). O AFM tem como componente principal uma microviga, com uma ponteira em uma das extremidades, que vibra próximo de sua frequência de ressonância para mandar sinais a um fotodetector que traduz esse sinal e gera as imagens da superfície da amostra. O modo de operação tapping é o mais usado e o comportamento caótico é muito comum nesse modo de operação, por esse motivo, AFM se tornou um assunto muito interessante no mundo científico. Nesse trabalho, a microviga é modelada usando a equação de Bernoulli, enquanto que as interações entre ela e a amostra são modeladas usando o potencial de Lennard Jones. Simulações numéricas detectam movimento caótico no sistema e a necessidade de estabilizá-lo nos leva a usar os seguintes métodos: Método do Balanço Harmônico, sincronização de sistemas não lineares, método das equações de estado dependentes de Riccati (SDRE), método de realimentação atrasada. Por fim, a aplicação dos métodos se mostra eficiente, com pequeno erro e fácil aplicação. PALAVRAS-CHAVE: Caos, Microscopia De Força Atômica, Ressonância, SDRE, Sincronização, Realimentação Com Sinal Atrasado. 1 INTRODUÇÃO Desde sua criação, em meados do século XV, os microscópios sofreram enorme evolução e recentemente uma das áreas da microscopia que mais se desenvolveu foi a microscopia por varredura (SPM). Seu início se deu no ano de 1981, quando Gerd Binnig e Heinrich Rohrer, dois pesquisadores, a serviço da IBM Suíça, inventaram o Microscópio de Tunelamento (STM), que é capaz de analisar e manipular amostras de tamanho atômico (IEEE Global History Network, 2010). Após essa invenção, outros tipos de microscópios de varredura foram desenvolvidos, tais como Microscópio de Força Atômica (AFM), o Microscópio Óptico de Campo Próximo (SNOM), entre outros. Esse tipo de microscópio funciona basicamente com uma sonda guiada por um braço robótico sobre a superfície de uma amostra microscópica (Tusset e Balthazar, 2010). Neste trabalho estuda-se o Microscópio de Força Atômica (AFM), que usa como braço robótico uma microviga, de aproximadamente 449µm e uma sonda em sua ponta livre com aproximadamente o tamanho de um átomo (Bowen e Hilal, 2009). No AFM, existem três

V Seminário da Pós-graduação em Engenharia Mecânica
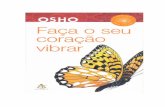
modos de operação para a microviga: o modo sem contato, contato e modo de toques rápidos (tapping), sendo o último modo o mais usado (Rützel et al, 2006). Na figura 1.1, há um esquema de funcionamento do AFM, ao vibrar, a sonda situada na ponta da microviga possui seu movimento detectado por um laser, que envia sinais para um fotodetector, e assim as imagens da amostra são obtidas.
Figura 1.1-Esquema de funcionamento do AFM (Kuroda et al (2008))
Na literatura científica, vale mencionar Sebastian et al (2001) que utilizou um modelo de um grau de liberdade, com coeficientes lineares para descrever as forças atrativas e repulsivas. Garcia e San Paulo (2000) usaram a equação de massa-mola para descrever o comportamento da microviga, a descrição utilizada por DMT e van der Waals para descrever as interações ponteira-amostra, em Rützel et al (2006). A microviga é modelada usando as equações de Bernoulli, as interações entre ponteira-amostra são modeladas usando o potencial de Lennard Jones, sem mencionar as várias outras publicações existentes na literatura específica. Este trabalho se originou após estudo do modelo proposto Rützel et al (2006), no qual encontra-se a modelagem matemática, feita para obter as equações governantes do sistema, e as simulações numéricas para entender o comportamento do mesmo. Além disso, com o uso do diagramas de bifurcação analisa-se o sistema com a variação da amplitude, e a partir dessa análise, usa-se os expoentes de Lyapunov para garantir a instabilidade do sistema. Por fim, o estudo de imagens como retratos de fase, mapas de Poincaré, entre outros, possibilita afirmar que o sistema tem comportamento caótico. Num outro estágio do trabalho, duas soluções periódicas são encontradas, uma usando o Método do Balanço Harmônico e outra com a mudança de parâmetros do sistema. Ao final do trabalho, para garantir a estabilidade e performance do sistema, usa-se o método SDRE, levando o movimento caótico para a solução encontrada com o Método do Balanço Harmônico, e o método de Pré-alimentação para manter o sistema controlado. Em outra situação, o método SDRE também é usado para fazer a sincronização de sistemas não lineares, e o método de Realimentação Atrasada é usado para encontrar uma órbita periódica instável e manter o sistema controlado.
2 MODELAGEM MATEMÁTICA

V Seminário da Pós-graduação em Engenharia Mecânica
O modelo físico utilizado nesse trabalho é baseado no modelo proposto por Rützel, Lee e Raman (2003), neste trabalho, representa-se a deflexão da microviga com as equações de Euller-Bernoulli-Lagrange, e as interações entre ponteira e amostra são representadas pelo potencial de Lennard Jones. Na modelagem surge uma EDP que é adimensionalizada e aproximada a uma EDO pelo método de Galerkin (Rützel et al, 2006). Após esse processo, a equação diferencial ordinária que representa o modelo fica:
Figura 2 – Um esquema de (a) inicial, (b) intermediário, e (c) configurações da
deformação da microviga. (Qin-Quan, Chen, 2006).
No modelo estudado, após modelagem matemática obtém-se a equação diferencial parcial que representa o movimento de flexão da microviga e as interações entre ponteira e amostra.
1 28 2
( , *) ( ( , *) * ( ))
. ( )180( * ( , *) sin *) 6( * ( , *) sin *)
Au x t EI u x t x
A R A Rx L
u L t Y t u L t Y t
ρ ω
δη η
′′′′ ′′′′+ + =
= − + − +
− − Ω − − Ω
&&
2 sin * A Y tρ+ Ω Ω
(1)
Onde Z é a distância entre a ponteira e a amostra, w*(L) mostra a deflexão da ponta da microviga em relação ao seu comprimento L, * * ( )Z w Lη = − é a distância de equilíbrio entre a ponteira e a amostra considerando a deflexão w*(L). A deflexão da microviga é representada por u(x,t*) e a densidade de massa por ρ, E é o módulo de Young e A representa uma secção de área com momento de inércia I. A microviga está presa em x=0 e livre em x=L. Na figura 2a, as forças de interação entre ponteira e amostra estão inoperantes, em 2b, a deflexão w*(L) ocorre devido as forças de atração e repulsão existentes entre amostra e ponteira, nesse caso, existem não linearidades no movimento da ponta da microviga. A figura 2c, representa a atuação das forças de interação na microviga, e sua deflexão, que já está representada por u(x,t*). Por fim, a vibração do atuador piezoelétrico é representada pela equação ( )y t Ysen t= Ω , onde Ω e Y são a frequência e amplitude da excitação respectivamente. A1 e A2 são as constantes de Hamaker, e representam simultaneamente, o

V Seminário da Pós-graduação em Engenharia Mecânica
potencial atrativo e repulsivo. As constantes de Hamaker são dadas pelas expressões:
21 1 2 1A cπ ρ ρ= e 2
2 1 2 2A cπ ρ ρ= .
Ao usar o método de Galerkin, e após adimensionalização, obtém-se uma equação diferencial
ordinária que aproxima a equação (1):
211 12
1 1 18 2(1 ) (1 )
C Cy d y y B E sen t
y sen t y sen tη
η η= − − + + + + Ω Ω
− − Ω − − Ω&& &
(2)
Na equação 2, y é o deslocamento da ponta da microviga através da amostra, η é a amplitude adimensional da vibração do atuador PZT, ambos adimensionalizados pela distância de equilíbrio entre a amostra e a ponta da microviga, no caso em que a frequência de excitação da microviga é próxima à frequência natural, Ω =1. 3 SIMULAÇÕES NUMÉRICAS:
Ao considerar o sistema 2 escrito na forma de estados e com as seguintes trocas de variáveis,
1x y= , 2x y= & , temos:
1 2
6211 12 1
2 1 1 2 1 181
(1 sin( ))sin( )
(1 sin( ))
x x
C C x tx x d x B E t
x t
ηη
η
=
+ − − Ω= − − + + + Ω Ω
− − Ω
&
& (3)
Os parâmetros obtidos após a adimensionalização realizada no capítulo anterior e análise de estabilidade da seção anterior são:
1 0.01d = , 1 0.148967D = − , 511 4.59118 10C
−= − × , 12 0.149013C = , 1 1.57367E = , e 1ω =
Na figura 3, tem-se o diagrama de bifurcação com η variando de 0 a 2:
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-7
-6
-5
-4
-3
-2
-1
0
1
y
n
Figura 3 - Diagrama de Bifurcação com variação do parâmetro η.

V Seminário da Pós-graduação em Engenharia Mecânica
Para 0 0.613η≤ < observa-se que o comportamento do sistema é periódico, para 0.613η = , observa-se a primeira bifurcação e o sistema se torna 2-periódico, para 0.99η ≥ o comportamento do sistema é caótico. Em seguida, os expoentes de Lyapunov são calculados, e a figura 4 mostra o comportamento dos mesmos ao longo do tempo.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 105
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
t
Lyapunov
Figura 4 – Estabilidade de Lyapunov.
Os valores para os expoentes de Lyapunov são: 1 0.062205λ = , 2 0λ = , e 3 0.072190λ = − . A
simulação foi realizada com 52 10t = × e o valor do expoente positivo manteve-se estável. A figura 5 é o retrato de fase do sistema, essa figura mostra o comportamento do mesmo e faz um gráfico da posição x(t) pela velocidade ( )x t& , na figura gerada é possível observar comportamento irregular do sistema e a presença de vários períodos e de atratores estranhos. Nas figuras 5 e 6, obtém-se o retrato de fase com movimento irregular e o histórico de deslocamento sem período aparente. Na figura 7, observa-se o espectro irregular da FFT do sistema, por fim, na figura 8, observa-se o mapa de Poincare com a presença de atrator estranho.

V Seminário da Pós-graduação em Engenharia Mecânica
-4 -3 -2 -1 0 1 2-5
-4
-3
-2
-1
0
1
2
3
4
5
x
dx
/dt
RETRATO DE FASE
Figura 5 - Retrato de fase com
comportamento irregular.
0 50 100 150-4
-3
-2
-1
0
1
2
Tempo
De
slo
ca
me
nto
Figura 6 – Histórico de deslocamento sem período aparente.
0 50 100 150 200 250 300 350 400 450 5000
100
200
300
400
500
600
700
frequency (Hz) Figura 7 – FFT com espectro irregular e picos
de ressonância.
-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1-2.5
-2
-1.5
-1
-0.5
0
0.5
1
x
dx/d
t
Figura 8 – Mapa de Poincaré com
presença de atrator estranho.
Ao analisar as figuras de 3 a 8é possível afirmar que para 0.99η = e com os outros parâmetros usados, o sistema representado pela equação 2 é caótico.
4 SOLUÇÕES PERIÓDICAS Nesta seção dois métodos são utilizados para encontrar soluções periódicas para o sistema, o método do balanço Harmônico e a mudança de parâmetros do sistema para encontrar um sistema periódico.

V Seminário da Pós-graduação em Engenharia Mecânica
4.1 Método do Balanço Harmônico O Método do Balanço Harmônico consiste em encontrar uma órbita periódica através de harmônicos obtidos de uma solução em série muito parecida com a série de Fourier().
0
( ) cos( ) ( )N
n n
n
y t A n t B sen n tω ω=
= +∑ (3)
Escolhe-se o primeiro harmônico na busca da solução periódica:
0 1 1( ) cos( ) ( )y t A A t B sen tω ω= + + (4)
Ao aplicar no sistema 2, obtemos a seguinte solução:
0.148967 0.348967cos( )y t= − + (5)
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
x
dx/d
t
Figura 9 – Solução periódica encontrado com
HBM.
0 10 20 30 40 50 60 70 80 90 100-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
t
dis
pla
cem
ent
Figura 10 – Deslocamento da órbita
periódica. 4.2 Mudança de parâmetros Nesta seção a busca por uma resposta periódica do sistema será através da mudança de alguns parâmetros. Como visto na figura 3, quando 0 0.2η≤ ≤ , o sistema é periódico. Ao adotar os
parâmetros 1 50E = e 0.01η = obtemos as figuras 5.7 e 5.8 que são o retrato de fase e
histórico de deslocamento respectivamente:

APLICAÇÃO DOS MÉTODOS DE CONTROLE
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1.5
-1
-0.5
0
0.5
1
1.5
x1
x2
Figura 11 – Retrato de fase da órbita periódica.
900 910 920 930 940 950 960 970 980 990 1000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
t
x1
a Figura 12 – Histórico de deslocamento da órórbita periódica.
5 Métodos de controle Nesta seção o método SDRE é aplicado ao sistema para levar o sistema com comportamento caótico até a órbita encontrada através do HBM, em seguida, o mesmo método é usado para fazer a sincronização dos sistemas não lineares. Por fim, o método de realimentação atrasada é aplicado a fim de levar o comportamento caótico a uma órbita periódica instável. 5.1 Método SDRE A figura 13 e 14, mostram o retrato de fase e histórico de deslocamento com controle e sem controle
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
x
dx
/dt
Figura 13 – Órbita controlada do
sistema.
0 10 20 30 40 50 60 70 80 90 100-4
-3
-2
-1
0
1
2
t
De
slo
ca
me
nto
Sem controle
Com controle
Figura 14 – Sistema comcontrole e
sem controle.

APLICAÇÃO DOS MÉTODOS DE CONTROLE
Na figura 15, o retrato de fase mostra o controle aplicado ao sistema, no centro, observamos a órbita controlada juntamente com o retrato de fase do movimento caótico.
-4 -3 -2 -1 0 1 2-5
-4
-3
-2
-1
0
1
2
3
4
5
x
dx/d
t
Sem controle
Com controle
Figura 15 – Sistema com controle e sem controle.
Por fim, a comparação entre a órbita de controle e a órbita periódica é mostrada nas figuras 16 e 17.
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
x
dx/d
t
HBM
Controle
Figura 16 – Órbita periódica comparada à órbita de controle.
-0.3732 -0.3731 -0.3731 -0.373 -0.373 -0.3729 -0.3729 -0.3728
0.2673
0.2673
0.2674
0.2674
0.2675
0.2676
0.2676
0.2677
x
dx
/dt
órbita periódica
Figura 17 – Ampliação da figura 16.
Ao analisar as figuras 16 e 17, é possível observar que o controle foi efetivo, já que o erro
obtido foi *max 0.000015x x− = , com tempo de simulação 100t s≤ .
5.2 Sincronização de sistemas não lineares A seguir, as figuras 18 e 20 mostram a sincronização dos dois sistemas, com comportamento caótico e com comportamento periódico, as figuras 19 e 21 mostram as respectivas ampliações para melhor visualização.

APLICAÇÃO DOS MÉTODOS DE CONTROLE
0 10 20 30 40 50 60 70 80 90 100-2
-1.5
-1
-0.5
0
0.5
1
t
x1
master
slave
Figura 18 – Deslocamento do sistema mestre e escravo
6.5012 6.5013 6.5014 6.5015 6.5016 6.5017 6.5018 6.5019 6.502-1.25
-1.25
-1.2499
-1.2498
-1.2498
-1.2498
-1.2497
-1.2496
-1.2496
-1.2496
-1.2495
t
x1
master
slave
Figura 19 – Ampliação da figura 18
-2 -1.5 -1 -0.5 0 0.5 1-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x1
x2
master
slave
Figura 20 – Sistema com caos e sistema periódico
0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.20.0384
0.0385
0.0386
0.0387
0.0388
0.0389
x1
x2
master
slave
Figura 21 – Ampliação da figura 20
Observa-se nas figuras 17, 18, 19 e 20 que a sincronização foi realizada com sucesso no sistema. 5.3 – Método de realimentação do sinal atrasado Nas figuras 22, 23 e 24, observa-se a aplicação do sistema de controle de sinal atrasado.

APLICAÇÃO DOS MÉTODOS DE CONTROLE
0 10 20 30 40 50 60 70 80 90 100-4
-3
-2
-1
0
1
2
t
x1
without control
control
Figura 22 – Deslocamento com controle (vermelho) e sem controle (preto)
-4 -3 -2 -1 0 1 2-5
-4
-3
-2
-1
0
1
2
3
4
5
x1
x2
without control
control
Figura 23 – Retrato de fase com controle (vermelho) e sem controle (preto) 6 CONCLUSÕES Ao término do trabalho, conclui-se que a modelagem se mostrou eficiente e com as simulações numéricas foi possível encontrar movimento caótico no sistema. Em seguida, a busca por soluções periódicas obteve sucesso e os métodos de controle aplicados mostraram-se eficazes e de fácil aplicação. 7 REFERÊNCIAS BIBLIOGRÁFICAS

APLICAÇÃO DOS MÉTODOS DE CONTROLE
Aime´, J. P., Boisgard, R., Nony, L. & Couturier, G. 1999 Nonlinear dynamic behavior of an oscillating tip–micro lever system and contrast at the atomic scale. Phys. Rev. Lett. 82, 3388–3391. Astakhov, V.V., Anishchenko, V.S., Kapitaniak, T., Shabunin A.V., Synchronization of chaotic oscillators by periodic parametric perturbations. Phys. D. 1997; 109:11–6. Balthazar, J.M., Cheshankov, B. I., Ruschev, D. T., Barbantin, L., Weber, H. I., Remarks on the passage through resonance of a vibrating system with two degree of freedom, excited by a non ideal source. Journal of Sound and Vibration, 295 (5), p. 1075 – 1085, 2001. Banks, S. P., and Manha, K. J., “Optimal Control and Stabilization for Nonlinear Systems”, IMA Journal of Mathematical Control and Information, vol. 9 pp. 179-196, 1992. Basso, M., Giarre, L., Dahleh, M. and Mezic, I., 2000, “Complex dynamics in a harmonically excited Lennard-Jones Oscillator: micro-cantilever sample interaction in scanning probe microscopes”, J. Dynam. Syst. Meas. Control Vol 122, pp. 240–245. Beer, F. P., Johnston, E. R. Jr., Mechanics of Materials, 2nd ed., McGraw-Hill, New York, 1992. Binnig, G., Gerber, C., Quate C., Atomic Force Microscope, Phys. Rev. Lett., 56, 930-933, 1986. Blazejczyk, O. B., Brindley, J., Czolczynski, K., Kapitaniak, T., Antiphase synchronization of chaos by noncontinuous coupling: two impacting oscillators. Chaos, Solitons & Fractals 2001; 12: 1823–6. Boisgard, R., Michel, D. & Aim´e, J. P., Hysteresis generated by attractive interaction: oscillating behavior of a vibrating tip–micro-cantilever system near a surface. Surf. Sci. 401, 199–205, 1999. Bowen, W. R., Hilal, N., Atomic force microscopy in process engineering. Elsevier Ltda. 2009. Cloutier, J. R., “State-Dependent Riccati Equation Techniques: An Overview”, Proceedings of the American Control Conference, vol.2, pp.932-936, 1997. Couturier, G., Nony, L., Boisgrad, R., Aim´e, J. P., Stability of an oscillating tip in noncontact atomic force microscopy: theoretical and numerical investigations. J. Appl. Phys. 91, 2537–2543, 2002. Dimentberg, M. F., Mcgovern, L., Norton, R. L., Chapdelaine, J., Harrison, R., Dynamics of an unbalanced shaft interacting with limited power supply. Nonlinear Dynamic, 13, p.171 – 187, 1997.

APLICAÇÃO DOS MÉTODOS DE CONTROLE
Erden. E. B., “Analysis And Real-Time Implementation Of State-Dependent Riccati Equation Controlled Systems”, Tese de doutorado apresentada na Universidade de Illinois em Urbana-Champaign, 2001. Fradkov, A. L., Evans, R. J., Control of chaos: Methods and applications in engineering, Annual Reviews in Control, 29, p. 33 – 56, 2005. Garcia R., San Paulo A., Dynamics of a vibrating tip near or in intermittent contact with a surface; 2000. Physical Review B 61, 20. Guran, A., 1997, “Nonlinear Dynamics: The Richard Rand 50th anniversary volume”, World scientific publishing, Co Pte Ltda, Series on stability, vibration and control of systems. Series B: Vol 2 -24,25. Haeri, M., Khademian, B., Comparison between different synchronization methods of identical chaotic systems. Chaos, Solitons & Fractals 2006; 29: 1002-10222. Hale, J. K., Koçak, H., Dynamics and Bifurcations Springer-Verlag, 1991. Hu, S., Raman, A., Chaos in Atomic Force Microscopy., Physical Review Letters ., DOI: 10.1103/PhysRevLett.96.036107, 2006. IEEE Global History Network. Scanning Tunneling and Atomic Force Microscopes, 2010, Disponível em: <http://www.ieeeghn.org/wiki/index.php/Scanning_Tunneling and_Atomic_Force_Microscopes >. Acesso em 15 de junho de 2011. Israelachvili, J., 1991, Intermolecular and surface forces, 2nd ed. London. Kuroda M., Yabuno H., Hayshi K., Ashida K., Amplitude Control in a van der Pol-Type Self-Excited AFM Microcantililever, Journal of System Design and Dynamics. Vol. 2, n. 3, 2008. Leipholz, H., Stability Theory, New York, Academic Press. 1970, 277 p. Meirovitch, L., Principles and techniques of vibrations, Prentice-Hall, 1997. Meirovitz, L., Fundamentals of Vibrations, Mc Graw-Hill International Edition, 2001, Virginia, USA Misra, S., Dankowicks, H., Paul, M.R., Event-driven feedback tracking and control of tapping-mode atomic force microscopy. First Cite Publishing; 2007 Moon, C. F., Chaotic and Fractal Dynamics, an introduction for applied scientists and engineers., Wiley VCH, New York, 1992. Ott, E., Grebogi, C., Yorke, J., Controlling chaos, Physics Review Letters, 64, p. 1196 – 1199, 1990.

APLICAÇÃO DOS MÉTODOS DE CONTROLE
Palácios, J. L., Teoria de sistemas vibratórios aporticados não lineares e não ideais. Tese de Doutorado, UNICAMP – Campinas, 2002. Pearson, J. D., “Approximation Methods in Optimal Control”, Journal of Electronics and Control, vol.13, pp. 453-465, 1962. Pecora, L. M., Carroll, T. L., “Synchronization in chaotic system”. Phys Rev Lett. 1990; 64(8): 821–5. Peruzzi, N., Balthazar, J. M., Pontes Jr., B. R., Nonlinear dynamics and control of an ideal/non ideal load transportation system with periodic coefficients. Journal of Computational and Nonlinear Dynamics, v. 2, p. 32-39, 2007. Piccirillo, V., Dinâmica Não Linear e Controle de um Sistema Vibratório Modelado com Memória de Forma e, Excitado por Fontes de Energia do Tipo Ideal e Não- Ideal, Dissertação de Mestrado – Universidade Estadual Paulista. Faculdade de Engenharia Mecânica, Bauru, 2008. Pontes Jr., B. R., Dinâmica e controle de sistemas não lineares com interação auto excitadora, sujeitos a fontes de energia do tipo ideal e não ideal. Tese de Doutorado, EESC/USP – São Carlos, 2003. Prof2000, origem e evolução do microscópio, 1999, disponível em <http://www.prof2000.pt/users/biologia/historia.htm>, acesso em 15 de novembro de 2010. Rafikov, M., Balthazar, J. M., Tusset. A. M., An Optimal linear Control Design for Nonlinear Systems, J. of the Braz. Soc. Of Mech. Sci. & Eng., 4, p. 279-284, 2008. Rützel, S., Lee, S.I., Raman, A., Nonlinear dynamics of atomic force microscope probes driven in Lennard-Jones potentials. Proc. R. Soc. London A. 2003; 459: 1925–48 Salarieh, H., Alasty, A., “Control of chaos in atomic force microscopes using delayed feedback based on entropy minimization”, Communications in Nonlinear Science and Numerical Simulation, 2007, Vol 14, pp. 637- 644. Sampaio, A. E. G., Análise de comportamento dinâmico de colunas semi-senterradas, Dissertação apresentada como requisito parcial para obtenção do título de Mestre pelo Programa de Pós-Graduação em Engenharia Civil da PUC-Rio. Área de Concentração: Estruturas, Rio de Janeiro, 2004. Sebastian, A., Salapaka, M. V., Chen, D. J., and Cleveland, J. P., Harmonic and power balance tools for tapping mode atomic force microscope; 2001. Journal of Applied Physics, 89, pp. 6473–6480. Seborg, D. E., Edgar T. F., and Mellichamp, D. A., “Process Dynamics and Control”, John Wiley & Sons, NY. 1989. Shabana, A. A., Theory of vibration volume II: discrete and continuous systems.

APLICAÇÃO DOS MÉTODOS DE CONTROLE
Sinha, S. C., Henrichs, J. T., Ravindra, B. A., A general approach in the design of active controllers for nonlinear systems exhibiting chaos, International Journal of Bifurcation and Chaos, 165- 178, 2000. Springer-Verlag, 1991. Stark, R.W., Schitter, G., Stark, M., Guckenberger, R., Stemmer, A., State-space model of freely vibrating and surface-coupled cantilever dynamics in atomic force microscopy. Physical Review B 69. 2004. Tusset, A. M., Balthazar, J. M., Microscopia De Força Atômica: Controle de uma Microviga Modelada Matematicamente com Comportamento Não-Linear e sob a ação de Amortecimento Hidrodinâmico, 9TH Brazilian Conference on Dynamics, Control and Their Applications, DINCON 2010, 2010. Wikipédia, microscópio, disponível em <http://pt.wikipedia.org/wiki/Microsc% C3%B3pio>, acesso em 20 de junho de 2011. Wikipédia, microscópio de força atômica, 2011, disponível em <http://pt.wikipedia.org/wiki/Microsc%C3%B3pio_de_for%C3%A7a_at%C3%B4mica >, acesso em 25 de setembro de 2011. Witmer, E.A., "Elementary Bernoulli-Euler Beam Theory". MIT Unified Engineering Course
Notes. pp. 114-164, 1992. Wóznicki, Z. I., Solving Linear Systems; An Analysis of Matrix Prefactorization Iterative Methods. Matrix Editions, Scitech book news, 2010. Yamanaka, H., Murakami, S., Optimum design of operating curves for rotating shaft systems with limited power supply. In: Chung, H. (ed.), Current Topics in Structural Mechanics PVP, 179, ASME NY, p. 181 – 185, 1989. Yang, X. S., Duan,, C. K., Liao, X. X., A note on mathematical aspects of drive-response type synchronization. Chaos, Solitons & Fractals 1999;10:1457–62.