
UUDET MITTAUSMENETELMÄT JOKIYMPÄRISTÖN … · tulvatasangoilla ja jokisärkillä keilaten...
13
UUDET MITTAUSMENETELMÄT JOKIYMPÄRISTÖN KARTOITUKSESSA Petteri Alho 1,2 , Hannu Hyyppä 2 , Juha Hyyppä 3 , Claude Flener 1 , Elina Kasvi 1 , Matti Vaaja 2 , Antero Kukko 3 , Eliisa Lotsari 1 , Johanna Hohenthal 4 , Matti Kurkela 2 , Harri Kaartinen 3 , Henrik Haggrén 2 1 Turun yliopisto, Maantieteen ja Geologian laitos 2 Aalto-yliopisto, Maanmittaustieteiden laitos 3 Geodeettinen laitos 4 Helsingin yliopisto, Geotieteiden ja maantieteen laitos [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected] TIIVISTELMÄ Virtavesitutkimuksen tarvitsema maaston korkeustieto on tähän asti kerätty aikaavievin maastokartoituksin. Vasta viime vuosina on alettu hyödyntää kaukokartoitus-, paikkatieto- ja fotogrammetrisia aineistoja jokiympäristön kartoituksessa. Uusimpina kartoitusmenetelminä on käytetty liikkuvaa, maanpinnalta tapahtuvaa laserkeilausta (MLS, eng. mobile laser scanning) sekä UAV-valokuvia (eng. unmanned aerial vehicle). Olemme tutkineet MLS:n käyttökelpoisuutta koetöin jokitörmien ja -särkkien kartoittamisessa sekä muutostulkinnassa. Olemme myös kehittäneet UAV-kuviin ja tavanomaisiin ilmavalokuviin pohjautuvia mallin- nustekniikoita muun muassa jokiuoman syvyysmallin tekemiseen. Tässä artikkelissa esitel- lemme normaaliin ilmavalokuvaukseen perustuvan jokiuoman syvyysmallin. Näillä kauko- kartoitusmenetelmillä pystytään kattamaan huomattavasti laajempia alueita senttimetri- tarkkuudella jokiympäristöstä kuin perinteisillä GPS- tai takymetrimittauksilla. Särkistä ja uomien pohjista voidaan mitata korkeus- ja syvyystietoa tiheämmin kuin tavallisesti käyte- tyillä menetelmillä ja edelleen havaita sekä tulkita varsin pienipiirteisiä muutoksia särkkien pinnalla tai uoman pohjalla. Tässä artikkelissa kerromme kyseisten menetelmien periaatteita ja esittelemme kaksi sovellusta suomalaisesta jokiympäristöstä. Lopuksi pohdimme näiden menetelmien mahdollisuuksia ja rajoituksia virtavesitutkimuksessa. 1. JOHDANTO Jokiuoma ja sitä reunustavat alueet ovat yleensä herkkä ympäristö geomorfologisille muutoksille. Virtavesitutkimus on viimeisten vuosikymmenien aikana keskittynyt proses- sianalyysiin mittaamalla veden virtausta ja sedimentin kulkeutumista kenttäolosuhteissa (esim. Leopold & Wolman 1960; Frotningham & Rhoads 2003) ja laboratorio-olosuhteissa (esim. Rohrer, 1979; Whitting & Dietrich, 1993). Tällä lähestymistavalla jokiympäristön muutosta on tulkittu yleensä vain yksi- tai kaksiulotteisesti keskittyen yksittäiseen morfologiseen muotoon tai tiettyjen muodostumien ulottuvuuksien tilastolliseen tarkas- teluun. Perinteisesti on keskitytty uoman poikkileikkauksen tai pituusprofiilin muutosten mittaamiseen ja tulkintaan (Hohenthal ym. 2011). Toinen virtavesitutkimuksen kehityskaari on jokiuoman virtauksien simulointi hydrauli- sella mallinnuksella. Erilaisia hydraulisen mallinnuksen lähestymistapoja on jo pitkään The Photogrammetric Journal of Finland, Vol. 22, No. 3, 2011 115
Transcript of UUDET MITTAUSMENETELMÄT JOKIYMPÄRISTÖN … · tulvatasangoilla ja jokisärkillä keilaten...
UUDET MITTAUSMENETELMÄT JOKIYMPÄRISTÖN KARTOITUKSESSA
Petteri Alho1,2, Hannu Hyyppä2, Juha Hyyppä3, Claude Flener1, Elina Kasvi1, Matti Vaaja2, Antero Kukko3, Eliisa Lotsari1, Johanna Hohenthal4, Matti Kurkela2, Harri Kaartinen3, Henrik
Haggrén2
1 Turun yliopisto, Maantieteen ja Geologian laitos 2 Aalto-yliopisto, Maanmittaustieteiden laitos
3 Geodeettinen laitos 4Helsingin yliopisto, Geotieteiden ja maantieteen laitos
[email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], [email protected],
[email protected], [email protected], [email protected], [email protected]
TIIVISTELMÄ Virtavesitutkimuksen tarvitsema maaston korkeustieto on tähän asti kerätty aikaavievin maastokartoituksin. Vasta viime vuosina on alettu hyödyntää kaukokartoitus-, paikkatieto- ja fotogrammetrisia aineistoja jokiympäristön kartoituksessa. Uusimpina kartoitusmenetelminä on käytetty liikkuvaa, maanpinnalta tapahtuvaa laserkeilausta (MLS, eng. mobile laser scanning) sekä UAV-valokuvia (eng. unmanned aerial vehicle). Olemme tutkineet MLS:n käyttökelpoisuutta koetöin jokitörmien ja -särkkien kartoittamisessa sekä muutostulkinnassa. Olemme myös kehittäneet UAV-kuviin ja tavanomaisiin ilmavalokuviin pohjautuvia mallin-nustekniikoita muun muassa jokiuoman syvyysmallin tekemiseen. Tässä artikkelissa esitel-lemme normaaliin ilmavalokuvaukseen perustuvan jokiuoman syvyysmallin. Näillä kauko-kartoitusmenetelmillä pystytään kattamaan huomattavasti laajempia alueita senttimetri-tarkkuudella jokiympäristöstä kuin perinteisillä GPS- tai takymetrimittauksilla. Särkistä ja uomien pohjista voidaan mitata korkeus- ja syvyystietoa tiheämmin kuin tavallisesti käyte-tyillä menetelmillä ja edelleen havaita sekä tulkita varsin pienipiirteisiä muutoksia särkkien pinnalla tai uoman pohjalla. Tässä artikkelissa kerromme kyseisten menetelmien periaatteita ja esittelemme kaksi sovellusta suomalaisesta jokiympäristöstä. Lopuksi pohdimme näiden menetelmien mahdollisuuksia ja rajoituksia virtavesitutkimuksessa. 1. JOHDANTO Jokiuoma ja sitä reunustavat alueet ovat yleensä herkkä ympäristö geomorfologisille muutoksille. Virtavesitutkimus on viimeisten vuosikymmenien aikana keskittynyt proses-sianalyysiin mittaamalla veden virtausta ja sedimentin kulkeutumista kenttäolosuhteissa (esim. Leopold & Wolman 1960; Frotningham & Rhoads 2003) ja laboratorio-olosuhteissa (esim. Rohrer, 1979; Whitting & Dietrich, 1993). Tällä lähestymistavalla jokiympäristön muutosta on tulkittu yleensä vain yksi- tai kaksiulotteisesti keskittyen yksittäiseen morfologiseen muotoon tai tiettyjen muodostumien ulottuvuuksien tilastolliseen tarkas-teluun. Perinteisesti on keskitytty uoman poikkileikkauksen tai pituusprofiilin muutosten mittaamiseen ja tulkintaan (Hohenthal ym. 2011). Toinen virtavesitutkimuksen kehityskaari on jokiuoman virtauksien simulointi hydrauli-sella mallinnuksella. Erilaisia hydraulisen mallinnuksen lähestymistapoja on jo pitkään
The Photogrammetric Journal of Finland, Vol. 22, No. 3, 2011
115

käytetty uoman virtausolosuhteiden mallintamisessa ja tulvan laajuuksien arvioinnissa (esim. Hunter ym., 2007). Mallinnuksen kohteena voi olla yksi tulvatapahtuma tai kokonainen hydrologinen vuosi tai vuosikymmenet. Hydrauliseen mallinnukseen tarvitaan neljänlaista lähtöaineistoa: (1) topografinen ja batymetrinen aineisto, josta valmistetaan mallin geometria, (2) virtaama- tai vedenpinnan korkeustieto, (3) maanpinnan ja uoman pohjan karkeustieto ja (4) validointiaineisto (Bates, 2004). Viime vuosikymmeninä on kehitetty niin yksi-, kaksi- kuin kolmiulotteisia hydraulisia malleja (esim. Bates ym., 1992; Dargahi, 2004). Lisäksi on tutkittu yleisellä tasolla uoman dynamiikkaa yhdistä-mällä hydraulisia mallinnustuloksia ja joen geomorfologiaa (Rathburn & Wohl 2003; Brown & Pasternack, 2008). Virtavesitutkimuksiin on perinteisesti kerätty korkeusaineistoa aikaavievillä maasto-kartoituksilla (esim. takymetrikartoitus) tai topografikarttojen korkeuskäyristä. Näillä saadaan aikaan harvahko lähtötieto mallinnuksen pohjaksi. Viime aikoina on kuitenkin tehty kansainvälistä (esim. Alsdorf ym., 2000; Bates ym., 2003; Hudson & Colditz, 2003; Cobby ym., 2001) ja kansallista tutkimusta (Sane ym., 2006; Käyhkö ym., 2007; Alho ym., 2009) tarkkojen korkeusaineistojen vaikutuksista hydrauliseen mallinnukseen ja tulvakartoitukseen. Paljolti onkin siirrytty paikkatietokantojen ja kaukokartoitus-aineistojen hyödyntämiseen korkeusmallien valmistamiseksi hydraulisiin mallinnuksiin, mutta näiden aineistojen tarkkuus ja laatu eivät aina sovellu tarkkaan virtavesi-tutkimukseen (Neelz ym., 2006; Alho ym., 2008). Uusimpia menetelmiä jokiympäristön muutostulkinnassa ja hydraulisen mallinnuksen lähtöaineistojen hankkimiseksi ovat erilaiset laserkeilaussovellukset jokipenkereiden ja tulvatasankojen kartoituksessa (esim. Alho ym., 2009, Vaaja ym., 2011a) sekä erilaisten digitaalikuvien hyödyntäminen virtavesien syvyysmallinnuksessa (Flener ym., 2011). Ilmalaserkeilausmenetelmät soveltuvat hyvin kolmiulotteisen maasto- ja kohdemallin luomiseen alueille, joita ei voida kattaa nopeasti perinteisellä fotogrammetrisella kartoituksella. Tällaisia ovat rannikko- ja muut vesialueet sekä alueet, joilla ei ole usein riittävästi tukipisteitä, näkyvyys on esteellinen tai alueiden ekosysteemi voi olla herkkä maastomittausten aiheuttamalle kuormitukselle. Laserkeilauksen etuina perinteisiin fotogrammetrisiin tai kaukokartoitusmittauksiin verrattuna on nopeus ja menetelmän vähäisempi riippuvuus sääolosuhteista, edulliset kustannukset ja peitteisellä alueella jopa dekadia parempi mittaustarkkuus. Ilmalaserkeilauksella saavutettava kovan maanpinnan korkeusmallin tarkkuus on yleensä 5-10 cm riippuen lentokorkeudesta ja pistetiheydestä. Peitteisessä maastossa korkeusmallin tarkkuus vaihtelee 10 ja 30 cm välillä maanpinnan peitteisyyden, kaltevuuden ja pistetiheyden funktiona. Maalaserkeilauksessa laserkeilain sijoitetaan joko staattisesti kartoituspisteelle (esim. kolmijalan varaan), josta käsin lähialueen tarkka kolmiulotteinen kartoitus suoritetaan. Maalaserkeilauksella saadaan erittäin tarkkaa maanpinta- ja kasvillisuustietoa niin jokisärkistä, törmistä kuin tulvatasangoilta (esim. Vaaja ym., 2011a). Maalaserkeilauksella kohteesta saadaan suoraan runsaasti kolmiulotteisia havaintoja ilman työläitä välivaiheita ja kuvatulkintaa. Laserkeilauksella valmistettujen maastomallien avulla pystytään kolmi-ulotteisesti kartoittamaan jokiuoman vedenpinnan yläpuolinen topografia ja kaikuluotauksen tai fotogrammetrisen syvyysmallinnuksen avulla saadaan syvyystieto vedenpinnan alapuoli-sesta osasta. Uusin vaihtoehto kartoitukseen on sijoittaa laserkeilain GNSS-INS-laitteistoon järjestelmän (Global Navigation Satellite System - Inertial Measurement Unit) yhdistettynä vaikkapa reppuun, autoon tai veneeseen, jolloin liikkuvan maalaserkeilauksen (eli mobiili laserkeilaus)
116

avulla voidaan kartoittaa tarkasti ja nopeasti laajempia alueita kuin staattisella maalaserkeilauksella (esim. Alho ym., 2009). Tässä artikkelissa käsitellään ensin liikkuvan maalaserkeilauksen pääpiirteet jokiuoman topografian kartoittamisessa. Toiseksi kuvataan menetelmä fotogrammetrisen syvyysmallin tekemiseksi. Kolmanneksi annetaan esimerkkejä mittausmenetelmistä jokiympäristön kartoitus- ja muutostulkintatutkimuksista Teno- ja Pulmankijoilla. Lopuksi pohditaan menetelmien mahdollisuuksia ja rajoitteita jokiympäristön kartoituksessa. 2. LIIKKUVA MAALASERKEILAUS Laserkeilaimen mittaus perustuu ympäristön kohteiden havainnointiin tarkkojen etäisyys- ja kulmamittausten avulla. Nämä havainnot muunnetaan kolmiulotteisiksi pisteiksi eli piste-pilveksi, joka kuvaa yksityiskohtaisesti kohteen geometriaa. Laserkeilauksessa hyödynnetään tyypillisesti kahta eri mittaustekniikkaa etäisyyden määrittämiseksi, nimittäin laserpulssin kulkeman ajan määrittämistä (time-of-flight) tai vaihe-eron mittaamista (phase shift). Time-of-flight-lähestymistavassa lähetetään lyhyt amplitudimoduloitu laserpulssi kohti mitattavaa objektia. Laserpulssin kulkema aika (dt) keilaimesta kohteeseen ja takaisin mitataan ja muunnetaan etäisyydeksi (r). Etäisyys saadaan laskettua kun valonnopeus (c) on tunnettu seuraavasti:
2cdtr ×
= (1)
Vaihe-eromittauksessa jatkuvaa, moduloituja aallonpituuksia sisältävää lasersädettä lähetetään kohteeseen. Vaihe-ero ( ϕd ) lähetetyn ja vastaanotetun signaalin välillä mitataan ja ratkais-taan kokonaisten aaltojen lukumäärä kohteen ja keilaimen välillä. Etäisyysmittaukseen käytetyn moduloidun aallonpituuden frekvenssi tulee tuntea ja edelleen lyhimmän moduloidun aallonpituuden ( 0λ ) suhteen etäisyys voidaan ratkaista seuraavasti:
02λ
πϕ⎟⎠⎞
⎜⎝⎛=
dr (2)
jossa N on täysien laseraaltojen lukumäärä lyhimmällä moduloidulla aallonpituudella. Yhden aallonpituuden modulaatiossa saavutettavissa oleva mittaus määräytyy λ suhteen, jonka jälkeen vaihesykli toistaa itseään (RP Photonics, 2008). Edelleen N voidaan ratkaista yhden tai usean pidemmän aallonpituuden suhteen, jolloin voidaan kasvattaa keilaimen teoreettista mittausetäisyyttä. Tällöin päästään millimetritarkkuuteen etäisyyden määrittämisessä, joka ei ole mahdollista käyttämällä ainoastaan yhtä aallonpituutta. Vaihe-eromittaustapa mahdollistaa myös korkeamman pistemittaustiheyden kuin pulssilaser, sillä se valaisee kohdetta jatkuvasti, eikä edestakaisen pulssin kulkuaikaa tarvitse siten odottaa ennen seuraavaa mittausta. Liikkuvassa kartoituksessa hyödynnetään niin sanottua suorapaikannusmenetelmää, jossa laitteistoon asennetun GNSS-IMU-havainnot lasketaan joko reaaliaikaisesti tai jälkilaskenta-prosessissa laitteiston kulkureitiksi kolmiulotteisessa avaruudessa (Kuva 1). Aineistojen orientointiin ei siten tarvita tukipisteitä muutoin kuin laadunvalvontaan. Tarkan reittitiedon laskentaan tarvitaan kuitenkin avuksi GNSS-tukiasema, joka voi olla joko fyysisellä tunnetulla pisteellä tai vaihtoehtoisesti VRS-palvelun (Virtual Reference Station) tuottama
.
,
117
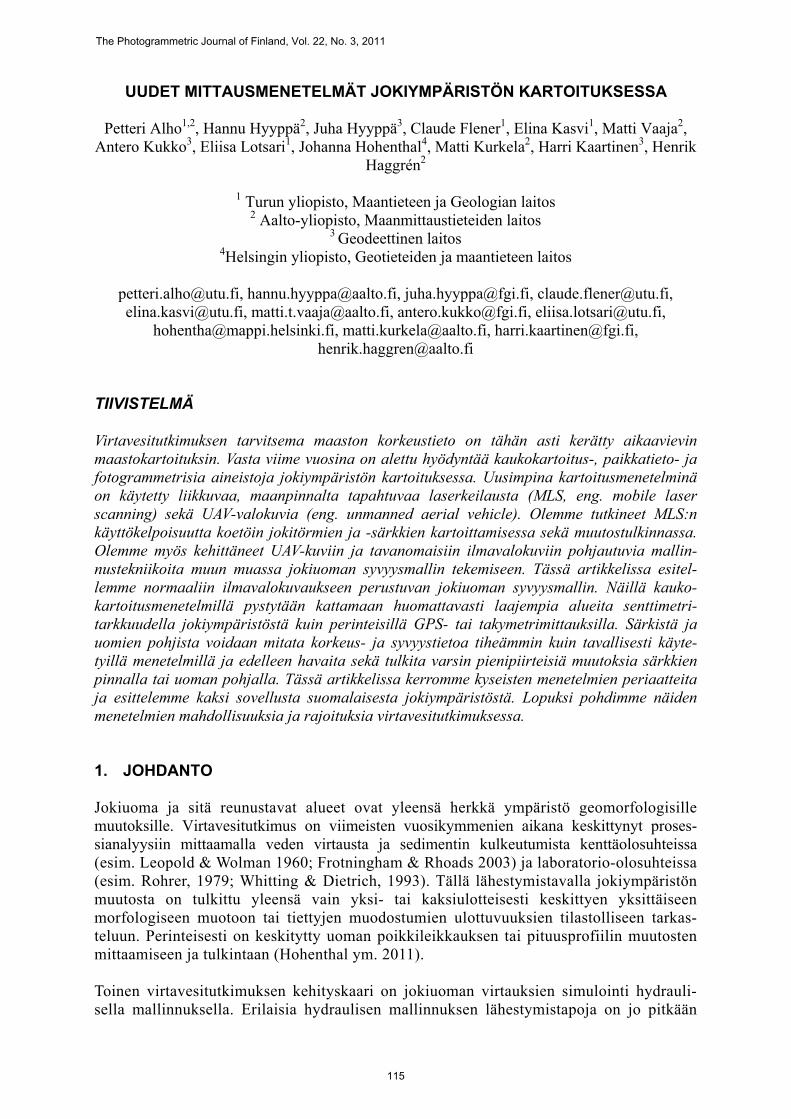
tukiasema kartoituskohteen läheisyydessä. Laserkeilain synkronoidaan ajallisesti paikannus-ratkaisuun, minkä perusteella tietyllä ajanhetkellä tehty mittaus orientoidaan maasto-koordinaatiston suhteen.
Kuva 1. Laserkeilauksen periaate veneeseen asennetussa liikkuvassa kartoitussovelluksessa. GNSS-IMU-havaintojen perusteella lasketaan veneeseen sijoitetun laserkeilaimen kulkureitti
ja asento. Lasersäteen kulman ja etäisyyden mittauksella saadaan määritettyä kunkin profiilin pisteen paikka keilainkoordinaatistossa. Yhdistämällä GNSS-IMU-havainnot laserpisteisiin
saadaan laskettua kullekin pisteelle sijainti maastokoordinaatistossa. Laserprofiileja saadaan jokitörmistä ja särkistä n. 5-10 cm välein riippuen veneen kulkunopeudesta (mukaillen Alho
ym. 2011). Geodeettinen laitos ja Aalto-yliopisto (ent. TKK) ovat kehittäneet vuodesta 2003 mobiilia kartoitusjärjestelmää (eng. Mobile Mapping System MMS), jossa pääasiallisena kartoitus-sensorina on laserkeilain. Aineiston käsittelymenetelmien kehityksessä on pyritty maksi-moimaan automaattinen prosessointi (Kukko ym., 2007; Kukko ym., 2009). Vuodesta 2008 alkaen tätä ROAMER-järjestelmää time-of-flight-lähestymistavalla on sovellettu joki-ympäristön kartoittamisessa (Alho ym., 2009; Alho ym., 2011; Vaaja ym., 2011a).
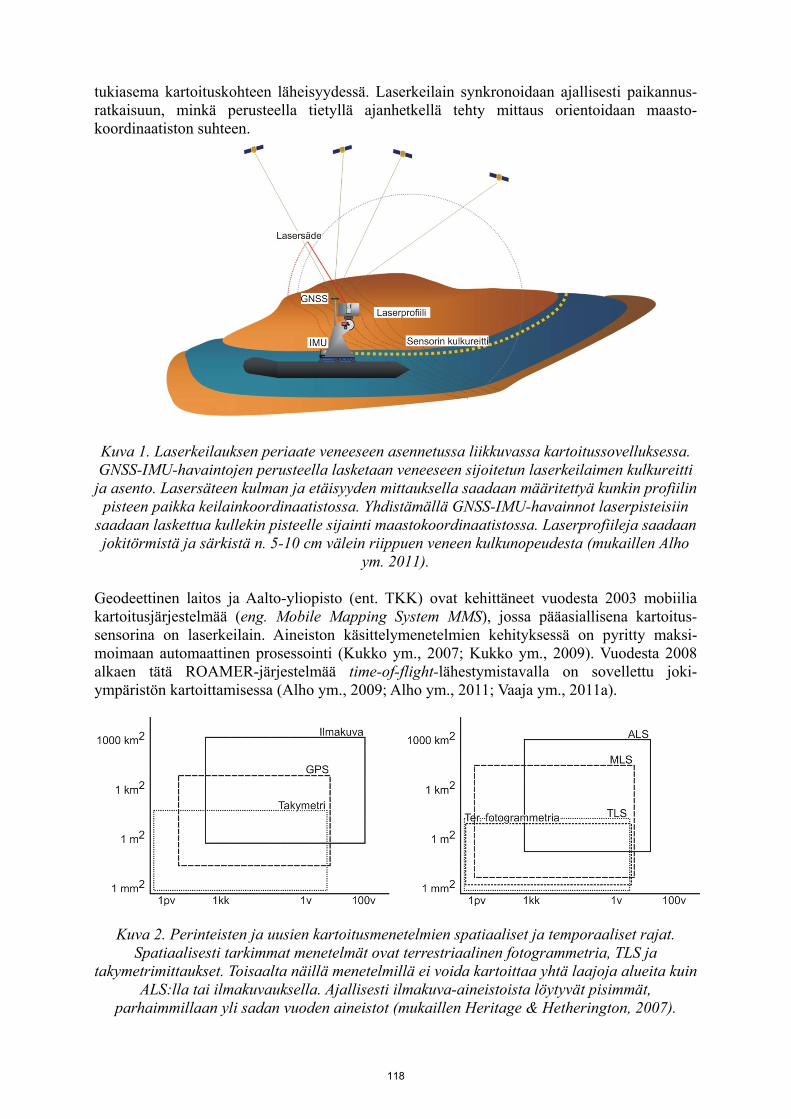
Kuva 2. Perinteisten ja uusien kartoitusmenetelmien spatiaaliset ja temporaaliset rajat. Spatiaalisesti tarkimmat menetelmät ovat terrestriaalinen fotogrammetria, TLS ja
takymetrimittaukset. Toisaalta näillä menetelmillä ei voida kartoittaa yhtä laajoja alueita kuin ALS:lla tai ilmakuvauksella. Ajallisesti ilmakuva-aineistoista löytyvät pisimmät,
parhaimmillaan yli sadan vuoden aineistot (mukaillen Heritage & Hetherington, 2007).
118

Laserkeilausmenetelmillä kuten muillakin kartoitusmenetelmillä on tietty toiminta-alue niin spatiaalisesti kuin temporaalisestikin (Kuva 2). Spatiaalisesti tarkimmat mittausmenetelmät, kuten terrestrinen laserkeilaus tai takymetrimittaus eivät työn hitauden vuoksi sovellu laajojen alueiden riittävän tiheään kartoittamiseen, vaan tällöin on käytettävä ilmakuvausta tai -laserkeilausta. Liikkuva maalaserkeilaus sijoittuu näiden menetelmien väliin mittaus-nopeutensa ja saavutettavan tarkkuuden ansiosta. Toisaalta nykyään pisimpiä aikasarjoja on saatavilla vain ilmakuva-aineistoista. Jokiympäristössä uoman ja läheisempien tulvatasankojen kartoittaminen on varsin tehokasta veneeseen sijoitetulla laserkeilaimella. Tällä lähestymistavalla voidaan kartoittaa noin 150 metrin levyinen alue veneen kummaltakin puolelta. Tehtyä keilausta voidaan edelleen täydentää joko maalaserkeilauksin tai mobiilikeilauksella esimerkiksi siten, että laserkeilain navigointilaitteistoineen sijoitetaan reppuun tai kärryyn ja sillä mittaus suoritetaan liikkumalla tulvatasangoilla ja jokisärkillä keilaten jokiympäristön topografiaa (Kuva 3).
Kuva 3. Liikkuva maalaserkeilain sijoitettuna veneeseen (a) tai kärryyn (b). Terrestrisessä laserkeilauksessa keilain on kolmijalalla (c). Kuvan Leica HDS 6000 -keilaimella saadaan
keilattua yhdestä keilauspisteestä n. 40 m säteellä särkän pintaa. Näin ollen mobiilit ratkaisut tarjoavat huomattavasti nopeamman tavan kartoittaa jokiympäristöä.
3. FOTOGRAMMETRINEN SYVYYSMALLINNUS Punaisen aallonpituuden laserkeilauksella ei saada mitattua jokiuoman pohjaa ja vihreän aallonpituuden sovellukset ovat vielä varsin rajoittuneita ja soveltuvat parhaiten kirkasvetisten merialueiden keilaukseen. Yksi vaihtoehto kaikuluotauksen lisäksi on fotogrammetrinen syvyysmallinnus ilmakuvilta. Fotogrammetriseen syvyysmallinnukseen on kehitetty muuta-mia lähestymistapoja mukaan lukien empiirinen malli, joka perustuu ns. Lyzenga-algoritmiin (Lyzenca 1981) ja teoreettinen HAB-malli (hydraulically assisted bathymetric) (Fonstad & Marcus, 2005). Empiirinen malli perustuu veden syvyyden ja heijastusarvon väliseen suhteeseen. Lyzengan (1981) algoritmissa määritellään kullekin ilmakuvan kanavalle i uusi muuttuja Xi = ln(Li-Lsi), jossa Li on havaittu kirkkaus ja Lsi on syvän veden heijastus samalla kanavalla. Veden syvyys on lineaarikombinaatio arvoista Xi =l,…,k, jossa k on kanavien lukumäärä. Lyzenga-algoritmi perustuu oletukselle, että valaistuksen heikkeneminen vedessä on eksponentiaalista ja heijastumiseen vaikuttavat muutkin tekijät kuin syvyys. Tärkein tekijä on pohjan laatu. Algoritmi käyttää mitattua syvän veden heijastusta, joka on ilmakuvan heijastusarvo uoman pohjan vaikutusalueen ulkopuolelta.
119
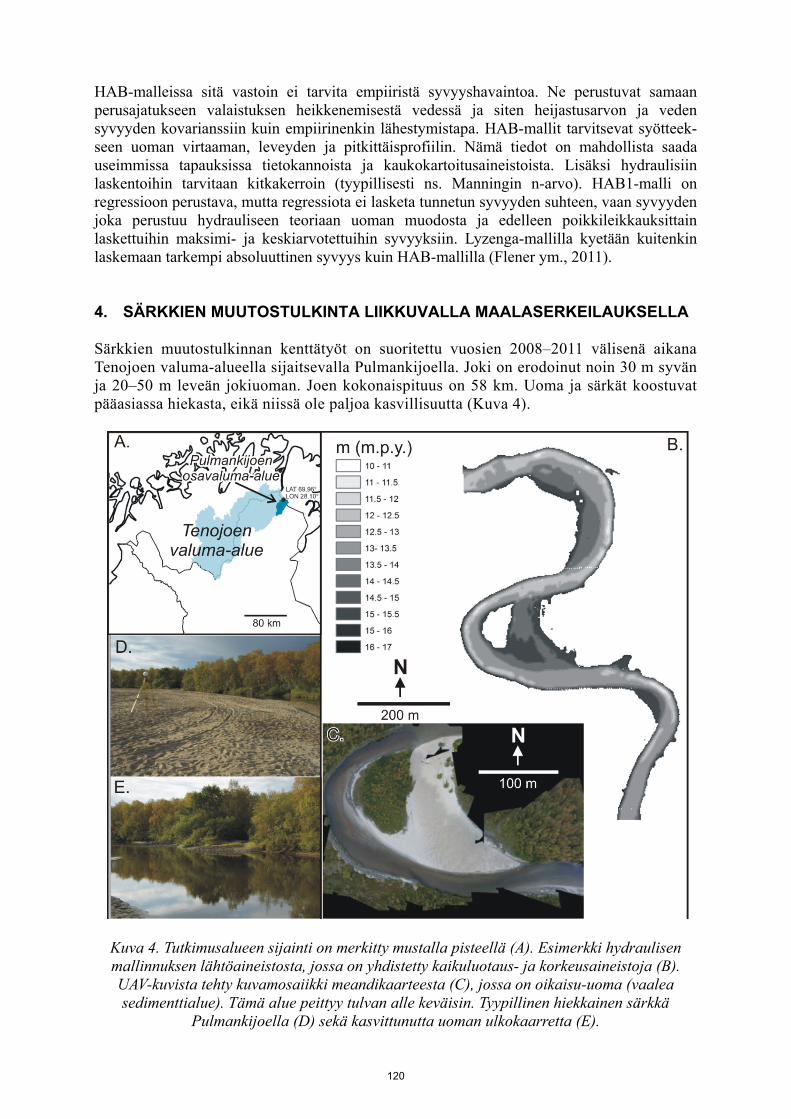
HAB-malleissa sitä vastoin ei tarvita empiiristä syvyyshavaintoa. Ne perustuvat samaan perusajatukseen valaistuksen heikkenemisestä vedessä ja siten heijastusarvon ja veden syvyyden kovarianssiin kuin empiirinenkin lähestymistapa. HAB-mallit tarvitsevat syötteek-seen uoman virtaaman, leveyden ja pitkittäisprofiilin. Nämä tiedot on mahdollista saada useimmissa tapauksissa tietokannoista ja kaukokartoitusaineistoista. Lisäksi hydraulisiin laskentoihin tarvitaan kitkakerroin (tyypillisesti ns. Manningin n-arvo). HAB1-malli on regressioon perustava, mutta regressiota ei lasketa tunnetun syvyyden suhteen, vaan syvyyden joka perustuu hydrauliseen teoriaan uoman muodosta ja edelleen poikkileikkauksittain laskettuihin maksimi- ja keskiarvotettuihin syvyyksiin. Lyzenga-mallilla kyetään kuitenkin laskemaan tarkempi absoluuttinen syvyys kuin HAB-mallilla (Flener ym., 2011). 4. SÄRKKIEN MUUTOSTULKINTA LIIKKUVALLA MAALASERKEILAUKSELLA Särkkien muutostulkinnan kenttätyöt on suoritettu vuosien 2008–2011 välisenä aikana Tenojoen valuma-alueella sijaitsevalla Pulmankijoella. Joki on erodoinut noin 30 m syvän ja 20–50 m leveän jokiuoman. Joen kokonaispituus on 58 km. Uoma ja särkät koostuvat pääasiassa hiekasta, eikä niissä ole paljoa kasvillisuutta (Kuva 4).
Kuva 4. Tutkimusalueen sijainti on merkitty mustalla pisteellä (A). Esimerkki hydraulisen mallinnuksen lähtöaineistosta, jossa on yhdistetty kaikuluotaus- ja korkeusaineistoja (B). UAV-kuvista tehty kuvamosaiikki meandikaarteesta (C), jossa on oikaisu-uoma (vaalea sedimenttialue). Tämä alue peittyy tulvan alle keväisin. Tyypillinen hiekkainen särkkä
Pulmankijoella (D) sekä kasvittunutta uoman ulkokaarretta (E).
120

Tämän takia uoma on varsin altis virtaavan veden aiheuttamille muutoksille ja on siten erinomainen luonnonlaboratorio vuotuisille morfologisille muutoksille ja niiden kartoit-tamiseen laserkeilausmenetelmillä. Tarkemman tutkimuksen kohteena on ollut noin 5 kilometrin jokiosuus, jolta on keilattu särkkiä ja törmiä sekä mobiililla vene- (eng. BoMMS) ja kärrykeilauksella (eng. CartMMS) että terrestrisellä laserkeilauksella. Pulmankijoen särkät keilattiin ensimmäisen kerran mobiililla laserkeilauksella syksyllä 2008 ja toistamiseen voimakkaan (45 m3 s-1) kevättulvan jälkeen syksyllä 2009. Mitatut laserprofiilit ovat noin 5-7 cm päässä toisistaan. Keilaimen peili pyöri 15 kertaa sekunnissa ja pistehavaintoja saatiin 120 kHz:n taajuudella. Näin ollen keilaimen peilin yhdellä kierroksella rekisteröitiin 8000 laserpistettä. Profiilin suuntaisesti mitattujen pisteiden välimatka oli suhteessa sensorin ja kohteen etäisyyteen ja säteen tulokulmaan: 20 metrin päässä keilaimesta pisteiden välinen etäisyys oli 15,7 mm ja lähempänä keilainta pisteiden välimatka pieneni entisestään. Viiden kilometrin jokiosuuden laserkeilaamiseen veneellä kului 1 tunti ja 40 minuuttia. Lisäksi keilausalueen täydentämiseen kärrylaserkeilaimella käytettiin aikaa n. 3 tuntia. Suurin osa tästä ajasta kului särkältä toiselle siirtymiseen ja GPS-IMU -laitteiston alustuksiin.
Kuva 5. Mobiili ja terrestrinen laserkeilaus sekä panoraamakuvaus fluviaaligeomorfologisessa tutkimuksessa. Mobiilissa keilauksessa keilaimen sijainti rekisteröidään systeemin sisäisesti. Toisin sanoen GPS-INS-mittauksella määritetään keilaimen sijaintia koko mittauksen ajan. Terrestrisessä laserkeilauksessa keilaimen
koordinaatit määritetään ulkoisten tähysten avulla, tavallisesti GPS-mittauksella. Pistepilveä suodatetaan ja luokitellaan halutun lopputuotteen mukaisesti. Toistamalla keilaus
peräkkäisinä vuosina saadaan kartoitettua jokiympäristön muutoksia. Pistepilvistä suodatettiin kasvillisuuspisteet pois ja tehtiin digitaalinen maanpinnan malli 10x10 cm pikselikoolla molemmille vuosille (Kuva 5). Yhdistämällä laseraineistoa ja panoraamakuvausta parannetaan kohteen ja mallien tulkintaa (Vaaja ym., 2011b). Vertailemalla tuotettuja pintamalleja keskenään (Kuva 6a) voidaan havaita, että särkän korkein kohta on muuttunut huomattavasti muodoltaan ja siirtynyt alajuoksulle päin. Näistä maanpinnan
121
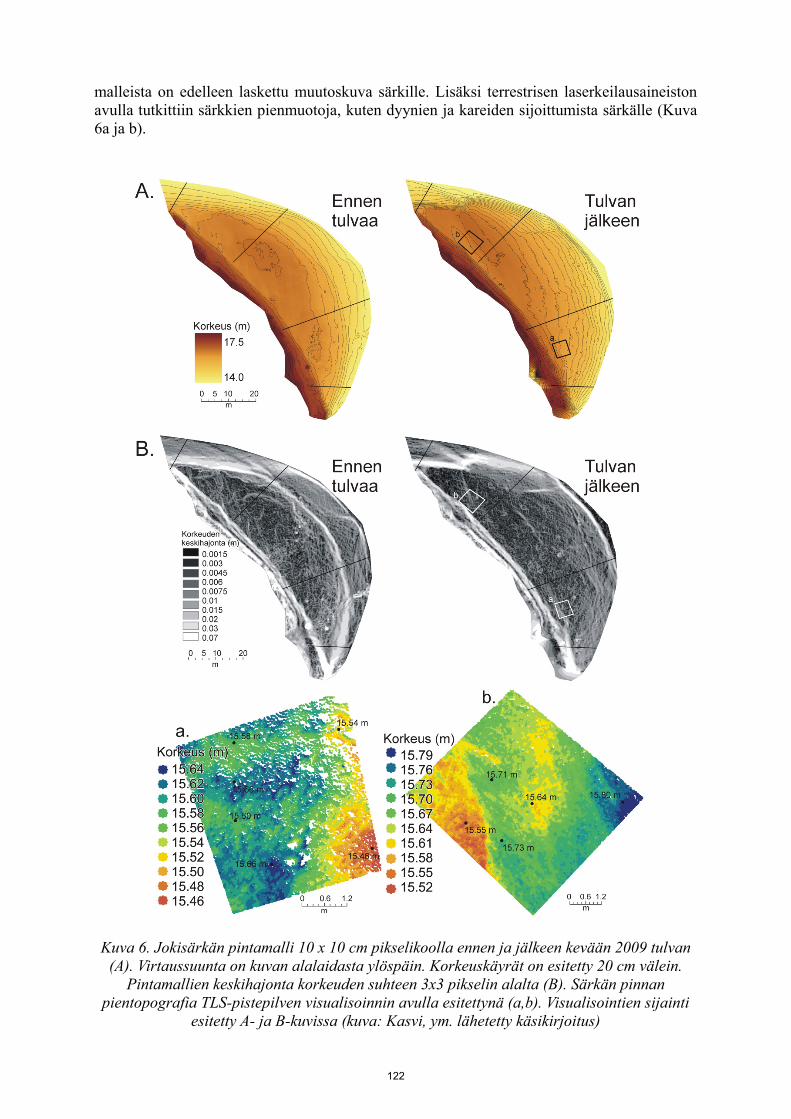
malleista on edelleen laskettu muutoskuva särkille. Lisäksi terrestrisen laserkeilausaineiston avulla tutkittiin särkkien pienmuotoja, kuten dyynien ja kareiden sijoittumista särkälle (Kuva 6a ja b).
Kuva 6. Jokisärkän pintamalli 10 x 10 cm pikselikoolla ennen ja jälkeen kevään 2009 tulvan
(A). Virtaussuunta on kuvan alalaidasta ylöspäin. Korkeuskäyrät on esitetty 20 cm välein. Pintamallien keskihajonta korkeuden suhteen 3x3 pikselin alalta (B). Särkän pinnan
pientopografia TLS-pistepilven visualisoinnin avulla esitettynä (a,b). Visualisointien sijainti esitetty A- ja B-kuvissa (kuva: Kasvi, ym. lähetetty käsikirjoitus)
122

Erotuskuvaan perustuvan muutostulkinnan perusteella särkän keskiosien korkeimmat kohdat olivat kulutukselle alttiita tulva-aikana (Kuva 7). Tällä alueella esiintyi virtaavan veden aiheuttamaa eroosiota, joka laski särkän pintaa 20-80 cm. Särkän ja jokiuoman sedimenttiä kasaantui särkän ulkoreunalle. Tällä vyöhykkeellä sijaitsi lukuisia kasautumismuotoja, joiden korkeus oli 20-40 cm korkeammalla kuin vuotta aiemmin. Särkän ulkokaarteen alajuoksun puolella sijaitsee alue, jolla vertikaalinen kasautuminen on jopa 60-80 cm yhdessä vuodessa. Koko särkän alueella yleisin vertikaalinen muutos oli 7,9-20 senttimetrin aleneminen (25%). Toisaalta kolmanneksi yleisin muutos oli 7,9-20 senttimetrin kohoaminen.
Kuva 7. Jokisärkän muutoskuva. Jokisärkän korkeuden muutokset vaihtelevat -80 cm ja +80 cm välillä. Yleisin muutos on 7,9-20 senttimetrin aleneminen (25%).
123

5. JOKIUOMAN SYVYYSKARTOITUS ILMAKUVISTA Lyzenga-syvyysmallilla mallinnettiin 1,5 km jokiosuus Tenojoesta. Jokiosuus sijaitsee Utsjoelta 3 km alajuoksulle päin. Tällä alueella joen pohja koostuu karkeasta sorasta ja lohkareista. Uoman leveys on n. 200 metriä. Mallinnukseen käytettiin v. 2005 oikeaväri-ilmakuvia. Ilmakuvat on orto-oikaistu 0,5 m pikselikokoon Norjan maanmittauslaitoksen toimesta. Ensimmäisessä vaiheessa laskettiin Lyzengan X-arvot jokaiselle RGB-kuvan kanavalle (Kaava 3 ja Kuva 8). Korrelaatio mitattujen syvyyksien ja X-arvojen välillä oli hyvä eritoten punaisen ja vihreän aallonpituuden kanavilla. Näin ollen näitä kanavia hyödynnettiin jatkossa Lyzenga-mallin laskennassa.
Kuva 8. Mitattujen syvyyksien ja Lyzenga-mallin X-arvojen korrelaatio. Paras korrelaatio
(-0,83) on punaisen aallonpituuden kanavan x-arvolla (Flener ym. 2011). Veden syvyyden ja Lyzenga X-arvon välinen lineaarinen suhde mahdollisti lineaaristen regressioiden laskennan seuraavanlaisesti: D = 613,982-255,212 X1-142,780 X2 (3)
124

Mallin kaikki regressiokertoimet olivat 0,001 merkitsevyystasolla. Mallin sovitus tuotti 12 cm RMS-virhe syvyydelle ja mallin selitysaste R2 oli 0,96. Lyzenga-algoritmilla saatiin mallinnettua tehokkaasti ja suhteellisen tarkasti uoman geometria jokiosuudella, jonka kaikuluotaus tai syvyysmittaus GPS-havainnoin olisi vienyt huomat-tavasti pidemmän ajan.
Kuva 9. Ilmakuvasta Lyzenga-mallilla laskettu syvyysmalli 1,5 km jokiosuudesta Tenojoella.
Mallin RMS-virhe oli 12 cm.
6. UUDET KARTOITUSMENETELMÄT JOKIYMPÄRISTÖN
KARTOITTAMISESSA: MAHDOLLISUUDET JA HAASTEET Esittelimme tässä artikkelissa uusia kartoitusmenetelmiä jokiympäristön veden yläpuolisen alueen ja jokiuoman vedenalaisen geometrian kartoittamiseksi. Nämä menetelmät mahdol-listavat nopeamman ja tarkemman kartoittamisen kuin perinteiset menetelmät. Yhteenvetona toteamme näiden menetelmien eduiksi ja rajoitteiksi seuraavaa:
• Liikkuva maalaserkeilaus on nopea ja tällä hetkellä kustannustehokkain mittausmenetelmä, joka yltää parempaan kuin 5 cm absoluuttiseen tark-kuuteen, ja jolla voidaan kartoittaa >1 km jokiosuuksia. Veneeseen sijoitetulla laserkeilaimella pystytään keilaamaan jokea (leveys >100 m) n. 3 km tunnissa profiilivälin ollessa 5-7 cm. Täydentämällä venelaserkeilausta särkän päällä tapahtuvalla keilauksella saadaan kartoitettua jokiympäristö kokonaisuudes-saan.
• Terrestrinen laserkeilaus on käytännössä tarkin kartoitusmenetelmä, jolla saadaan mitattua koko jokisärkkä. Tällä menetelmällä voidaan mitata särkän pientopografiaa, kuten dyynien ja kareiden dimensioita. Se ei kuitenkaan täysin sovellu pitkien jokiosuuksien tai lukuisten särkkien kartoittamiseen, sillä terrestrisen keilaimen liikuttaminen on hidasta ja jo keskikokoisen särkän keilaamiseen tarvitaan suuren peittovaatimuksen vuoksi kymmenkunta keilainpaikkaa.
• Mobiili ja terrestrinen laserkeilaus ovat sääherkempiä mittausmenetelmiä verrattuna ilmalaserkeilaukseen, sillä näiden keilaimien optiikka on alttiina vedelle ja kondensoitumiselle. Näin ollen kenttätöihin tulee varata riittävästi aikaa.
• Liikkuvaan maalaserkeilausaineistoon perustuvat jokisärkkien erotuskuvat ja niiden perusteella laskettu muutostulkinta on huomattavasti yksityiskohtai-sempi menetelmä kuin GPS-mittauksella tehdyn harvan pistejoukon perusteella
125
suoritettu mallinnus. Mobiili laserkeilaus mahdollistaa käytännössä maan-pinnan mittauksen jokiympäristössä senttimetritiheydellä, kun välimatka mitat-tavan kohteen ja keilaimen välillä on alle 100 metriä.
• Lyzenga-algoritmilla tehtävä jokiuoman syvyyskartoitus on tehokas kartoitus-menetelmä varsinkin kirkasvetisissä joissa. Menetelmällä saadaan mallinnettua uoman syvyys paremmalla kuin 15 cm tarkkuudella. Tämä tarkkuus on erittäin hyvä verrattuna uoman GPS-mittauksiin. Se kilpailee kattavuuden suhteen myös monikanavaisen viistokaikuluotauksen kanssa. Menetelmä mahdollistaa myös uoman tilan tutkimisen taaksepäin, mikäli joki on taannoin ilmakuvattu oikeavärifilmille.
• Kaikki yllä mainitut menetelmät mahdollistavat entistä tarkemmat lähtö-aineistot muutostulkintaan ja hydrauliseen mallinnukseen. Ne tarjoavat myös uniikkia referenssiaineistoa sedimenttikulkeutumisen mallinnukseen ja seuran-taan.
LÄHTEET Alho, P. & Mäkinen, J., 2010. Hydraulic parameter estimations of a 2-D model validated with sedimentological findings in the point-bar environment. Hydrological Processes 24, 2578-2593.
Alho, P., Kukko, A., Hyyppä, H., Kaartinen, H., Hyyppä, J. & Jaakkola, A. 2009. Application of boat-based laser scanning for river survey. Earth Surface Processes and Landforms 34, 1831–1838.
Alho, P., Hyyppä, H. & Hyyppä, J. 2009. Consequence of DTM precision for flood hazard mapping: a case study in SW Finland. Nordic Journal of Surveying and Real Estate Research 6, 21–39.
Alho, P., Vaaja, M., Kukko, A., Kasvi, E., Kurkela, M., Hyyppä, J., Hyyppä, H. & Kaartinen, H. 2011. Mobile laser scanning in fluvial geomorphology: mapping and change detection of point bars. Zeitschrift fur Geomorphologie 55, Suppl. 2, 31-50.
Alsdorf, D.E., Melack, J.M., Dunne, T., Mertes, L.A.K., Hess, L.L. & Smith, L.C. 2000. Interferometric radar measurements of water level changes on the Amazon flood plain, Nature 404, 174–177.
Bates, P. D., 2004. Remote sensing and flood inundation modelling Hyd. Process 18, 2593–2597.
Bates, P. D., Anderson, M. G., Baird, L., Walling, D. E. & Simm, D. 1992. Modelling floodplain flows using a 2-dimensional finite element model. Earth Surface Processes and Landforms 17, 575−588.
Bates, P.D. Marks, K. J. & Horritt, M. S. 2003. Optimal use of high-resolution topographic data in flood inundation models. Hyd. Process. 17, 537–557.
Brown, A.B. & Pasternack, G.B. 2008. Engineering channel controlas limiting spwning habitat rehabilitation success on regulated gravel-bed rivers. Geomorphology 97, 631-654
Cobby, D.M., Mason, D.C. & Davenport, I.J. 2001. Image processing of airborne scanning laser altimetry data for improved river flood modelling. ISPRS Journal of Photogrammetry & Remote Sensing 67, 121−138.
Dargahi, B. 2004.Three-dimensional flow modelling and sediment transportation in the River Klarälven. Earth Surface Processes and Landforms 29, 821–852.
Flener, C., Lotsari, E., Alho, P. & Käyhkö, J. 2010 (online). Comparison of empirical and theoretical remote sensing based bathymetry models in river environments. River Research and Applications. DOI: 10.1002/rra.1441.
Fonstad, M.A. & Marcus, W.A. (2005. Remote sensing of stream depths with hydraulically assisted bathymetry (HAB) models. – Geomorphology 72: 107-120.
126
Frothingham, K.M. & Rhoads, B.L. 2003. Three –dimensional flow structure and channel change in an asymmetrical compound meander loop, Embarras River, Illinois. – Earth Surface Processes and Landforms 28: 625–644.
Hohenthal, J., Alho, P., Hyyppä, J. & Hyyppä, H. 2011 (online). Laser scanning applications in fluvial studies. Progress in Physical Geography.
Hudson, P.F. & Colditz, R.R. 2003. Flood delineation in a large and complex alluvial valley, lower Pa´nuco basin, Mexico, Journal of Hydrology 280, 229-245.
Hunter, N. M., Bates, P. D., Horritt, M.S. & Wilson, M.D., 2007. Simple spatially-distributed models for predicting flood inundation: A review. Geomorphology 90, 208−225.
Kasvi, E., Vaaja, M., Alho, P., Hyyppä, H., Hyyppä, J., Kaartinen, H. & Kukko, A. Morphological changes on meander point bars: utilising multitemporal LiDAR surveys and flow measurements. (lähetetty käsikirjoitus: Earth Surface Processes and Landforms).
Kukko, A., Andrei, C-O., Salminen, V-M., Kaartinen, H., Chen, Y., Rönnholm, P., Hyyppä, H., Hyyppä, J., Chen, R., Haggrén, H., Kosonen, I. & Capek K.2007. Road environment mapping system of the Finnish Geodetic Institute – FGI Roamer. In Proceedings of the ISPRS Workshop ‘Laser Scanning 2007 and SilviLaser 2007’. Rönnholm P, Hyyppä H, Hyyppä J. (eds.). International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 36(3/W52): 241–247.
Kukko, A., Jaakkola, A., Lehtomäki, M. & Kaartinen, H. 2009. Mobile mapping system and computing methods for modelling of road environment. – 2009 Urban Remote Sensing Joint Event, 20.-22. May, Shanghai
Käyhkö, J., Alho, P. & Selin, M., 2007. Tulvat ja tulvien kartoitus Suomessa. Terra 119, 25−34.
Leopold, L. & Wolman, W. 1960. River meanders. – Bulletin of the geological Society of America. 71: 769-794.
Lyzenga DR. 1981. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. International Journal of Remote Sensing, 2: 71–82.
Neelz, S., Gender, G., Villanueva, I., Wilson, M., Wright, N.G., Bates, P. Mason, D. & Whitlow, C., 2006. Using remotely sensed data to support flood modelling. Water Management 159, 35-43.
Rathburn, S. & Wohl, E., 2003. Predicting fine sediment dynamics along a pool-riffle mountain channel, Geomorphology 55, 111−124.
Sane, M., Alho, P., Huokuna, M., Selin, M. & Käyhkö, J., 2006. Opas yleispiirteisen tulvavaarakartoituksen laatimiseen. Ympäristöopas 127, 73 s. ISBN 978-ISBN-952-11-2162-SYKE, Helsinki.
Vaaja, M., Hyyppä, J., Kukko, A., Kaartinen, H., Hyyppä, H. & Alho, P. 2011a. Mapping Topography Changes Using a Mobile Laser Scanner. Remote Sensing 3, 587–600.
Vaaja, M., Kurkela, M., Hyyppä, H., Alho, P., Hyyppä, J., Kukko, A., Kaartinen, H.,Elina, Kasvi, Kaasalainen, S. & Rönnholm, P. 2011b. Fusion of mobile laser scanning and panoramic images for studying river environment topography and changes. ISPRS Workshop Laser Scanning 2011, 29-31 August 2011, Calgary, Canada.
127


















