UROP Symposium Poster
1
Abstract The purpose of this research is to generate a new type of matching algorithm in R^D. Common and established approaches deal with datasets that have equal pairwise dis- tances of points, and can superimpose them by a series of Euclidean motions. By calculat- ing some value, there is then some metric for how similar two datasets are. A problem arises in matching two datasets that have unequal pairwise distances. The focus of this study is re- stricting the pairwise distances to be equal within some reasonable value. We look into creating an actual example of this form, by moving from the isometric case to the near-isometric case. Objectives & Hypothesis: The focus of the project was to bring to life a working example of our method. While we were confident that the techniques and ideas projected in the paper of focus were correct, we also needed to verify that they worked as expected. By expanding the idea of image mapping to account for small variations, our techniques can let us gain information about a data set from its corresponding map. Methods: First and foremost, a strong focus on under- standing the underlying mathematics was necessary. After that, the purpose became to the machinery working. Dubbed “slow twists”, implementation of these matrices would rotate datasets at a rate much slower than ex- pected. We started with the Procrustes problem. With two point sets with equal distances between all points, there exists set of Euclidean mo- tions(translations, slides, and rotations) that can superimpose the two. Project Sponsor: Dr. Steven Damelin, Department of Mathematics Student Researchers: Brad Schwartz, Sean Kelly Conclusions: In the future, we will work to create ideal synthetic datasets on which to experiment, and get a final im- plementation. We will continue to expand our focus to non-Euclidean analogues. We plan to generalize current image mapping algorithms, and expand our work to high dimensions. References: S. B. Damelin and C. Fefferman, Extension, interpolation and matching in R^D, arxiv:1411.2451. S. B. Damelin and C. Fefferman, Extensions in R^D, arxiv:1411.2468. S. B. Damelin and C. Fefferman, On Extensions of e Diffeomorphisms, preprint, arxiv:1505.06950 Charles Fefferman, Steven. B. Damelin and William Glover, BMO Theorems for epsilon distorted diffeomor- phisms on R^D and an application to comparing manifolds of speech and sound, Involve, a Journal of Mathematics 5-2 (2012), 159--172. DOI 10.2140/involve.2012.5.159 Epsilon-Distorted Diffeomorphisms for Interpolation and Matching in R^D, D ≥ 2 Illustrating slow twist as original dataset is rotated 90 degrees in R^2
-
Upload
brad-schwartz -
Category
Documents
-
view
231 -
download
0
Transcript of UROP Symposium Poster

AbstractThe purpose of this research is to generate a new type of matching algorithm in R^D. Common and established approaches deal with datasets that have equal pairwise dis-tances of points, and can superimpose them by a series of Euclidean motions. By calculat-ing some value, there is then some metric for how similar two datasets are. A problem arises in matching two datasets that have unequal pairwise distances. The focus of this study is re-stricting the pairwise distances to be equal within some reasonable value. We look into creating an actual example of this form, by moving from the isometric case to the near-isometric case.
Objectives & Hypothesis: The focus of the project was to bring to life a working example of our method. While we were confident that the techniques and ideas projected in the paper of focus were correct, we also needed to verify that they worked as expected.By expanding the idea of image mapping to account for small variations, our techniques can let us gain information about a data set from its corresponding map.
Methods: First and foremost, a strong focus on under-standing the underlying mathematics was necessary. After that, the purpose became to the machinery working. Dubbed “slow twists”, implementation of these matrices would rotate datasets at a rate much slower than ex-pected.We started with the Procrustes problem. With two point sets with equal distances between all points, there exists set of Euclidean mo-tions(translations, slides, and rotations) that can superimpose the two.
Project Sponsor: Dr. Steven Damelin, Department of MathematicsStudent Researchers: Brad Schwartz, Sean Kelly
Conclusions: In the future, we will work to create ideal synthetic datasets on which to experiment, and get a final im-plementation. We will continue to expand our focus to non-Euclidean analogues. We plan to generalize current image mapping algorithms, and expand our work to high dimensions.
References:S. B. Damelin and C. Fefferman, Extension, interpolation and matching in R^D, arxiv:1411.2451.S. B. Damelin and C. Fefferman, Extensions in R^D, arxiv:1411.2468.S. B. Damelin and C. Fefferman, On Extensions of e Diffeomorphisms, preprint, arxiv:1505.06950Charles Fefferman, Steven. B. Damelin and William Glover, BMO Theorems for epsilon distorted diffeomor-phisms on R^D and an application to comparing manifolds of speech and sound, Involve, a Journal of Mathematics 5-2 (2012), 159--172. DOI 10.2140/involve.2012.5.159
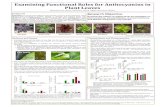
Epsilon-Distorted Diffeomorphisms for Interpolation and Matching in R^D, D ≥ 2
Illustrating slow twist as original dataset is rotated 90 degrees in R^2