
UNIVERSITAS NEGERI YOGYAKARTA -...
32
Tim PPM: Dr. Istanto Wahyu Djatmiko Muhammad Ali, ST., MT. Drs. S u n o m o, MT. Yuwono Indro Hatmojo, S.Pd., M.Eng. Nopa Widiyanto, A.Md. KEMENTERIAN PENDIDIKAN NASIONAL UNIVERSITAS NEGERI YOGYAKARTA LEMBAGA PENGABDIAN KEPADA MASYARAKAT 2013
-
Upload
truongkien -
Category
Documents
-
view
233 -
download
0
Transcript of UNIVERSITAS NEGERI YOGYAKARTA -...

Tim PPM:
Dr. Istanto Wahyu Djatmiko Muhammad Ali, ST., MT.
Drs. S u n o m o, MT. Yuwono Indro Hatmojo, S.Pd., M.Eng.
Nopa Widiyanto, A.Md.
KEMENTERIAN PENDIDIKAN NASIONAL
UNIVERSITAS NEGERI YOGYAKARTA LEMBAGA PENGABDIAN KEPADA MASYARAKAT
2013

JADWAL PELATIHAN APLIKASI ELEKTRONIKA DAYA UNTUK PENGATURAN MOTOR INDUKSI
BAGI PARA GURU SMK DI DAERAH ISTIMEWA YOGYAKARTA
Hari 1 (Kamis, 12 September 2013)
08:00 – 08:30 Registrasi dan Pembukaan
08:30 – 09:00 Pre Test
09:00 – 11:00 Karakteristik motor induksi
11:00 – 12:00 Teori Rangkaian AC Drive
12:00 – 13:00 Ishoma
13:00 – 14:00 Praktik Rangkaian AC Drive
14:30 – 15:00 Istirahat
15:00 – 16:00 Praktik Rangkaian AC Drive
Hari 2 (Jumat, 13 September 2013)
08:00 – 11:30 Praktik pengaturan motor induksi dengan ATV312
11:30 – 13:00 Ishoma
13:00 – 15:00 Praktik pengaturan motor induksi dengan ATV312
15:00 – 15:30 Istirahat
15:30 – 16:00 Post Test
Hari 3 (Sabtu, 14 September 2013)
08:00 – 12:00 Pendampingan pengembangan media
12:00 – 13:00 Penutup
Fasilitas Pelatihan : 1. Biaya pelatihan (gratis) 2. Modul pelatihan 3. Coffe break dan makan siang 4. Perangkat pelatihan yang memadai 5. Sertifikat Pelatihan (bagi yang mengikuti kegiatan dari awal sampai akhir)
KEMENTERIAN PENDIDIKAN NASIONAL
UNIVERSITAS NEGERI YOGYAKARTA LEMBAGA PENGABDIAN KEPADA MASYARAKAT
Alamat : Kampus Karangmalang, Yogyakarta, 55281
Telp. (0274) 550838; 586168 pes. 273 (Ka LPM); 359 (Kabag TU); 233;346 (TU LPM)
00693

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 1
A. PENDAHULUAN
Perkembangan ilmu dan teknologi yang merambah dunia industri memacu
penggunaan peralatan listrik. Berbagai peralatan proses di industri dicatu oleh
energi listrik yang sudah terbukti mempunyai efisiensi yang tinggi. Salah satu
aplikasi yang banyak dipakai di dunia industri adalah motor listrik. Untuk dapat
bekerja dengan baik, motor listrik memerlukan catu daya sesuai dengan jenis
motornya. Motor Listrik DC membutuhkan catu daya DC, sedangkan Motor Listrik
AC membutuhkan catu daya listrik AC baik 1 maupun 3 fasa.
Motor listrik di industri dipakai untuk berbagai keperluan, seperti fan atau
kipas, blower, kompresor, konveyor, penggerak lift, penggeran mesin bor,
penggerak mesin bubut dan penggerak mesin lainnya. Untuk menggerakkan dan
mengontrol motor listrik diperlukan rangkaian penggerak yang disebut dengan
nama drive. Motor listrik DC membutuhkan DC Drive sedangkan motor listrik AC
membutuhkan AC Drive. Motor listrik membutuhkan catu daya yang sesuai
dengan kebutuhannya dan untuk mengontrol kecepatan putar dan torsinya.
Pengaturan kecepatan dan torsi motor listrik di industri secara konvensional
tidak efektif dan menimbulkan rugi-rugi yang cukup besar sehingga diperlukan
mekanisme pengaturan yang lebih baik. Salah satu pilihan adalah dengan
menggunakan perangkat elektronika atau yang dikenal dengan Power Electronics
(Elektronika Daya), yaitu penggunaan perangkat elektronika untuk
mengendalikan peralatan listrik yang berdaya besar seperti motor listrik.
Elektronika Daya memberikan solusi terhadap permasalahan di dunia industri
untuk dapat melakukan pengaturan peralatan-peralatan dengan menggunakan
rangkaian yang dapat bekerja dengan arus dan tegangan yang besar secara
efektif dan efisien. Proses konversi besaran listrik (tegangan dan frekuensi) yang
sebelumnya dilakukan dengan cara konvensional yang boros kini mulai bergeser
pada penggunaan peralatan elektronik digital dengan menggunakan konsep
switching elektronik. Beberapa aplikasi di industri bekerja pada arus yang
mencapai ratusan bahkan ribuan amper dan tegangan yang tinggi 220 V, 380 V,
600 V, 3,8 KV bahkan ada yang lebih tinggi lagi.

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 2
B. MOTOR LISTRIK
1. Klasifikasi Motor Listrik
Motor listrik adalah suatu peralatan yang dapat mengubah energi listrik
menjadi energi mekanik dalam bentuk putaran pada porosnya. Untuk
mengonversi tenaga listrik menjadi tenaga mekanik, ada dua tipe motor listrik
ditinjau dari tipe sumber energi listriknya, yakni bolak-balik dan searah, yang
masing-masing memiliki kelebihan dan keterbatasan. Motor listrik bolak–balik
agar dapat berputar perlu memperoleh medan listrik yang dapat menghasilkan
gerak putar bagi rotornya. Untuk itu dilakukan berbagai cara sehingga
dihasilkan banyak versi motor bolak-balik. Untuk sumber listrik bolak-balik yang
bersifat tiga fasa tidaklah sulit, karena sistem tiga fasa memang otomatis
menghasilkan medan listrik yang berputar. Oleh sebab itu, hanya ada dua versi
motor arus bolak-balik tiga fasa, yakni motor dengan rotor sangkar tupai yang
disebut dengan istilah singkat motor induksi dan motor dengan rotor lilit.
2. Motor Induksi
Motor induksi adalah suatu mesin listrik arus bolak-balik (AC) yang
merubah energi listrik menjadi energi gerak dengan menggunakan
gandengan medan listrik dan mempunyai slip antara medan stator dan medan
rotor. Motor induksi merupakan salah satu peralatan yang banyak digunakan di
Industri untuk keperluan penggerak berbagai proses diantaranya adalah :
Pompa, Kompresor, Fun, Lift, Blower, Konveyor, Mesin Bor, Mesin Bubut, Mesin
Freis dan penggerak proses produksi lainnya. Motor induksi merupakan motor
yang paling banyak digunakan dalam aplikasi baik di rumah tangga maupun
industri.
Gambar 1 Motor Induksi

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 3
Gambar 2. Konstruksi Motor Induksi
Motor induksi banyak dipakai dalam aplikasi peralatan proses di industri
karena motor induksi mempunyai banyak kelebihan diantaranya adalah:
Harga lebih murah
Konstruksi Motor DC yang sederhana
Motor induksi mempunyai daya tahan yang lama
Tidak menggunakan sikat (borstel) sehingga faktor gesekan dapat dihindari
(kecil).
Perawatan mudah dan
Efisiensinya tinggi.
Selain kelebihan di atas, motor listrik induksi mempunyai beberapa
kelemahan yaitu:
Pengaturan kecepatan lebih sulit
Torsi awal cukup rendah.
Pengaturan kecepatannya tidak bisa dilaksanakan tanpa mengurangi
effisiensinya.
Kecepatannya turun dengan meningkatnya beban yang diberikan.
Arus asut yang dihasilkan sangat besar dan memberikan pengaruh juga
terhadap Torsi Starting yang kecil.

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 4
3. Karakteristik Motor Induksi
Motor induksi fasa tiga, khususnya motor induksi rotor sangkar tupai
merupakan salah satu jenis motor yang paling banyak digunakan di industri.
Kelebihan dari motor ini, diantaranya adalah konstruksi yang sederhana dan kuat
serta memerlukan sangat sedikit pemeliharaan dibandingkan motor DC.
Pengaturan kecepatan putar motor induksi dapat ditentukan dengan persamaan:
yang berarti, pengaturan kecepatan putar (N) motor induksi dapat dilakukan
dengan mengatur frekuensi (f) sumber bolak-baliknya, sedangkan mengubah
jumlah kutub motor (P) dipandang tidak praktis. Dengan pertimbangan ini, kini
mulai banyak didesain pengaturan frekuensi sumber tegangan untuk
mengemudikan motor induksi dengan kecepatan yang dapat diatur, dengan
istilah VVVF drive (variable voltage, variable frequency). Pengaturan ini dilakukan
dengan prinsip dasar mempertahankan fluksi medan putar yang konstan untuk
menghasilkan torsi konstan dengan adanya perubahan tegangan (V) dan
frekuensi (f), yang berarti perbandingan V dan I konstan sebagaimana
ditunjukkan pada Gambar 4.
Gambar 4. Kurva Torsi-Putaran dengan Ratio Tegangan-Frekuensi Konstan
Berdasarkan Standar yang dikeluarkan oleh National Electrical Manufacturers
Association (NEMA) Motor Rotor sangkar dapat dikelompokkan menjadi 4 kelas
berdasarkan karakteristik masing-masing kelas yaitu: motor kelas A, Motor kelas
B, motor kelas C, dan motor kelas D.

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 5
Gambar 4. Karakteristik Berbagai Kelas Motor Induksi
C. AC DRIVE
Meningkatnya penggunaan motor listrik sebagai penggerak peralatan
produksi di industri mendorong para pabrikan untuk terus mencari cara
meminimasi biaya dan meningkatkan efisiensinya. Salah satu cara yang dapat
ditempuh adalah dengan menggunakan AC drive. Berbagai macam AC Drive
untuk motor induksi, pengatur tegangan AC (AC regulator) merupakah salah satu
rangkaian pengatur tegangan elektronik yang dapat digunakan untuk pengaturan
motor induksi. AC regulator merupakan rangkaian yang mengkonversikan
sumber tegangan bolak-balik menjadi tegangan bolak-balik yang dapat diatur,
baik satu fasa maupun tiga fasa. Komponen utama dari rangkaian ini adalah SCR
yang dioperasikan sebagai sakelar. Terdapat dua prinsip operasi rangkaian AC
regulator, rangkaian unidirectional dan bidirectional. Rangkaian AC regulator
unidirectional digunakan apabila pengaturan tegangan luaran AC hanya pada
polaritas positif saja, sedangkan bidirectional apabila pengaturan tegangan
luaran AC dilakukan pada polaritas positif dan negatifnya. Gambar 6 merupakan
prinsip dasar rangkaian AC regulator jenis bidirectional yang digunakan untuk
pengaturan motor induksi.
AC Drive seringkali dikenal dengan istilah Inverter atau Variabel Speed
Drive (VSD) atau Variabel Frequency Drive (VFD) Penggunaan AC drive.
Penggunaan AC Drive dapat mengurangi konsumsi energi yang dibutuhkan oleh
peralatan secara signifikan. Hal ini disebabkan AC Drive menggunakan prinsip
switching untuk melakukan aksi kontrol dari sisi input sehingga motor listrik akan
menyesuaikan dengan bebannya. Jika beban kecil, maka motor akan menyerap
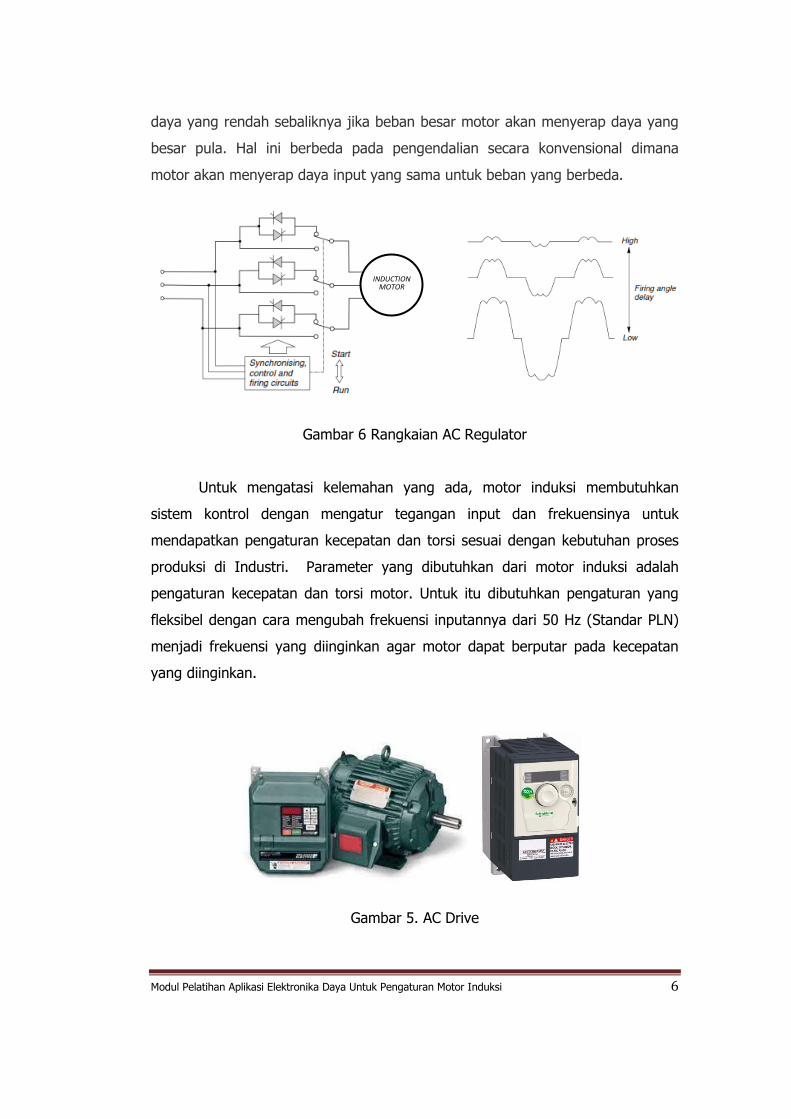
Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 6
daya yang rendah sebaliknya jika beban besar motor akan menyerap daya yang
besar pula. Hal ini berbeda pada pengendalian secara konvensional dimana
motor akan menyerap daya input yang sama untuk beban yang berbeda.
Gambar 6 Rangkaian AC Regulator
Untuk mengatasi kelemahan yang ada, motor induksi membutuhkan
sistem kontrol dengan mengatur tegangan input dan frekuensinya untuk
mendapatkan pengaturan kecepatan dan torsi sesuai dengan kebutuhan proses
produksi di Industri. Parameter yang dibutuhkan dari motor induksi adalah
pengaturan kecepatan dan torsi motor. Untuk itu dibutuhkan pengaturan yang
fleksibel dengan cara mengubah frekuensi inputannya dari 50 Hz (Standar PLN)
menjadi frekuensi yang diinginkan agar motor dapat berputar pada kecepatan
yang diinginkan.
Gambar 5. AC Drive
INDUCTION
MOTOR

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 7
Komponen AC Drive
Secara umum, AC Drive terdiri dari 3 bagian utama yaitu:
Rangkaian Konverter dari AC ke DC
Filter Gelombang DC
Rangkaian Inverter dari DC ke AC
Gambar 7. Blok Diagram Rangkaian VSD
Gambar 7 menunjukkan ketiga komponen rangkaian yang terintegrasi
menjadi 1 rangkaian. Sumber Listrik dari PLN ataupun pembangkit sendiri
mempunyai frekuensi yang konstan, dengan standar 50 Hz. Untuk merubah
frekuensi 50 Hz menjadi lebih kecil atau lebih besar dapat dilakukan dengan
mengubah sumber AC menjadi DC dahulu. Untuk itu dibutuhkan Rangkaian
Rectifier (Penyearah) atau Konverter (Penyearah Terkendali). Pada umumnya
digunakan konverter (penyearah terkendali) untuk mendapatkan Sumber DC dari
listrik AC. Setelah listrik AC diubah jadi sumber DC maka perlu dilakukan
perataan bentuk gelombang DC yang masih mengandung ripple (riak) AC.
Caranya dengan menambahkan DC Link atau regulator. Hal ini berfungsi untuk
meratakan bentuk gelombang DC agar berbentuk lurus dan stabil tidak terjadi
naik turun (riak). Setelah didapatkan listrik DC yang murni, langkah berikutnya
adalah mengubah Listrik DC menjadi listrik AC dengan rangkaian inverter.
Inverter sebenarnya berisi rangkaian fip flop yang melakukan pensaklaran secara

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 8
bergantian terhadap listrik DC sehingga menghasilkan listrik AC. Bentuk
gelombang yang dihasilkan dengan rangkaian inverter bisa gelombang kotak
atau gelombang sinus.
Untuk menghasilkan Listrik AC dari Output rangkaian inverter dengan
gelombang sinus diperlukan rangkaian PWM (Pulse Width Modulator). Rangkaian
ini yang akan mencacah listrik DC menjadi listrik AC dengan bentuk gelombang
mendekati sinus.
Gambar 8. Rangkaian Pulse Width Modulation
Gambar 9. Gambar Gelombang Hasil Pulse Width Modulation
Kenapa harus gelombang sinus? Listrik AC dengan gelombang non sinus
sebenarnya bisa digunakan untuk sumber peralatan listrik seperti lampu,
pemanas dan peralatan lainnya. Tetapi untuk motor listrik, gelombang AC non
sinus akan mempengaruhi kualitas dayanya dan berefek pada panas yang
ditimbulkan sehingga menyebabkan peralatan cepat panas dan rusak. Dengan
menggunakan inverter, maka akan banyak diperoleh keuntungan secara teknis
bila dibandingkan dengan cara lain. Beberapa keuntungan tersebut antara lain:

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 9
Jangkauan pengaturan kecepatan lebih lebar
Terdapat beberapa pola hubungan tegangan dan frekuensi
Mempunyai fasilitas penunjukan meter
Mempunyai lereng akselerasi dan deselerasi yang dapat diatur secara
independen
Dimensi yang lebih kompak, serta
Keamanan sistem lebih terjamin.
Di pasaran terdapat banyak produk AC Drive dengan nama produk yang
berbeda-beda untuk setiap merek. Ada pabrikan yang menyebut dengan istilah
Inverter, ada yang menggunakan istilah Variabel Speed Drive (VSD) dan ada pula
yang menggunakan istilah Variabel Frequency Drive (VFD) yang semuanya
sebenarnya menuruk pada fungsi yang sama.

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 10
PENGATUR TEGANGAN BOLAK-BALIK ( AC REGULATOR )
A. Tujuan
1. Merangkai rangkaian regulator unidirectional dan bidirectional satu fasa dan tiga fasa. 2. Mengoperasikan rangkaian regulator unidirectional dan bidirectional satu fasa dan tiga
fasa dengan beban R dan RL. 3. Mengukur besaran tegangan, arus, dan beda fasa pada rangkaian regulator
unidirectional dan bidirectional satu fasa dan tiga fasa dengan beban R dan RL.
4. Menganalisis hasil regulator unidirectional dan bidirectional satu fasa dan tiga fasa dengan beban R dan RL.
B. Alat dan Bahan
1. Modul transformator ………………………………………………. 1 unit
2. Modul Diode …………………………………………………. 1 unit 3. Modul SCR …………………………………………………. 1 unit
4. Modul TRIAC …………………………………………………. 1 unit 5. Modul beban RL .....……………………………………………. 1 unit
6. Potensiometer 100 k ………………………....…………………. 1 buah
7. Resistor 1 Ω/ 50 W ........…………..……………………………. 1 buah
8. Lampu 100 W/ 220 V.…………………………………………………. 3 buah 9. Multimeter …………………………………………………. 1 buah
10. CRO …………………………………………………. 1 buah
C. Rangkaian Percobaan
Regulator Satu Fasa
1. Rangkaian AC Regulator Unidirectional
2. Rangkaian AC Regulator Bidirectional dengan SCR
1 / 50 W
R
TCA 785
TCA
785
TCA 785
1 / 50 W
R

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 11
3. Rangkaian AC regulator bidirectional satu fasa dengan 4 diode dan 1 SCR
Regulator Tiga Fasa
4. Rangkaian AC Regulator Unidirectional
5. Rangkaian AC Regulator Bidirectional
D. Langkah Kerja
Regulator Satu Fasa
1. Buatlah rangkaian regulator unidirectional dengan beban R (lampu 100 W/ 220 V).
Perhatikan arah polaritas penyulutan SCR.
2. Lakukan pengukuran besaran tegangan (Vrms dan Vpeak) pada Vs, Vd, VSCR, Vo, sudut
penyulutan ( ), dan arus Io.
3. Cermati kembali hasil pengukuran anda, kemudian lanjutkan ke percobaan berikutnya.
4. Buatlah rangkaian regulator bidirectional dengan SCR dengan beban R (lampu 100
W/220 V).
Perhatikan arah polaritas penyulutan SCR.
V0
R
1 / 50 W
10 : 1
CRO
R
1 / 50 W
R
R
R
1 / 50 W
R
R

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 12
5. Lakukan pengukuran besaran tegangan ( Vrms dan Vpeak) pada Vs, Vd, VSCR, Vo, sudut
penyulutan ( ), dan arus Io.
6. Cermati kembali hasil pengukuran anda, kemudian lanjutkan ke percobaan berikutnya.
7. Buatlah rangkaian regulator bidirectional dengan 4 dioda 1 SCR dengan beban R (lampu 100W/220V)
8. Lakukan pengukuran besaran tegangan ( Vrms dan Vpeak) pada Vs, VTRIAC, Vo, sudut
penyulutan ( ), dan arus Io.
9. Cermati kembali hasil pengukuran anda, kemudian lanjutkan ke percobaan berikutnya.
Regulator Tiga Fasa
10. Buatlah rangkaian regulator unidirectional dengan beban R (lampu 3 x 100 W/220 V), bekerjalah lebih cermat
Perhatikan arah polaritas penyulutan SCR, sesuaikan dengan masing-
masing fasa
11. Lakukan pengukuran besaran tegangan ( Vrms dan Vpeak) pada Vs, Vd, VSCR, Vo, sudut
penyulutan ( ), dan arus Io.
12. Cermati kembali hasil pengukuran anda, kemudian lanjutkan ke percobaan berikutnya.
13. Buatlah rangkaian regulator bidirectional dengan SCR dengan beban R (lampu),
bekerjalah dengan lebih teliti.
Perhatikan arah polaritas penyulutan SCR, sesuaikan dengan masing-masing fasa
14. Lakukan pengukuran besaran tegangan ( Vrms dan Vpeak) pada Vs, Vd, VSCR, Vo, sudut
penyulutan ( ), dan arus Io.
15. Cermati kembali hasil pengukuran anda, kembalikan semua peralatan praktik.

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 13
LEMBAR PENGAMATAN
1. Data AC Regulator Bidirectional Satu Fasa dengan SCR
Beban
Vrms (volt) Vp (volt) Io (mA)
Vs VSCR Vo Vs VSCR Vo rms peak
Lampu (R) 45o
Lampu (R) ....o
Bentuk Gelombang dengan = 45O
Time/div = ................................
Bentuk Gelombang dengan = ....
Time/div = ................................
2. Data AC Regulator Bidirectional Satu Fasa dengan SCR
Beban Vrms (volt) Vp (volt) Io (mA)
Vs VSCR Vo Vs VSCR Vo rms peak
Lampu (R) 45o
Lampu (R) ...o
Bentuk Gelombang dengan = 45O
Time/div = ................................
Bentuk Gelombang dengan = ....
Time/div = ................................

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 14
3. Data AC Regulator Bidirectional Satu Fasa dengan 4 Dioda 1 SCR
Beban Vrms (volt) Vp (volt) Io (mA)
Vs VSCR Vo Vs VSCR Vo rms peak
Lampu (R) 45o
Lampu (R) ...o
Bentuk Gelombang dengan = 45O
Time/div = ................................
Bentuk Gelombang dengan = ....
Time/div = ................................
4. Data AC Regulator Unidirectional Tiga Fasa
Beban
Vrms (volt) Vp (volt) Io (mA)
Vs VSCR Vo Vs VSCR Vo rms peak
Lampu (R) ....o
Lampu (R) ....o
Bentuk Gelombang dengan = 45O
Time/div = ................................
Bentuk Gelombang dengan = ....
Time/div = ................................

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 15
5. Data AC Regulator Bidirectional Tiga Fasa
Beban Vrms (volt) Vp (volt) Io (mA)
Vs VSCR Vo Vs VSCR Vo rms peak
Lampu (R) ....o
Lampu (R) ....o
Bentuk Gelombang dengan = 45O
Time/div = ................................
Bentuk Gelombang dengan = ....
Time/div = ................................
Komentar Hasil Pengamatan:

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 16
KARAKTERISTIK ALTIVAR 312 (VARIABLE SPEED DRIVE)
A. Tujuan
1. Merangkai rangkaian Altivar 312 (ATV312).
2. Mengoperasikan pemrograman ATV312.
3. Menganalisis karakteristik catu daya untuk pengendalian motor induksi dengan Altivar.
B. Alat dan Bahan
1. Modul Altivar-312 ......................................................................... 1 unit
2. Multimeter ......................................................................... 1 unit
3. Frekuensimeter ........................................................................ 1 unit
4. Ampermeter AC ....................................................................... 1 unit
5. Lampu 100 W/ 220 V ........................................................................ 3 buah
6. Ballast TL ....................................................................... 3 buah
C. Rangkaian Percobaan
D. Langkah Kerja
Langkah Awal
Cermati terminal-terminal pada unit ATV312 sesuai Gambar Rangkaian Percobaan di
atas.
Pelajari dengan seksama Prosedur Operasi ATV312 ini sebagaimana terlampir.
Rangkaian unit ATV312 sesuai dengan gambar rangkaian.

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 17
Perhatikan dengan cermat pemasangan:
SAKELAR LI1 dan LI2 (Diberi input tegangan 24 V)
Perhatikan hirarki untuk mengakses parameter pada ATV312 dan fungsinya.
Set-lah semua parameter dar ATV312 pada kondisi setting pabrik (factory preset).
Pasanglah beban lampu 100 W/ 220 V seri dengan Ballast dalam hubungan bintang.
Setting Parameter Beban
1. Hubungkan titik simpul PO dan PA.
2. Hubungan (ON-kan) sumber daya satu fasa dan tekan tombol START.
3. Lakukan pemrograman untuk setting parameter beban:
Menu drC , kemudian set-lah - bFr = 50 Hz, UnS = 230 V, FrS = 50 Hz, nCr = 0,5
A, nSP = 1400 rpm, COS = 0,85, fFr = 100 Hz.
Setting Operasi Beban
1. Kembalikan Menu pada posisi rdy.
2. Set pada posisi Menu Set, kemudian setting parameter berikut: ACC = 3,0, dEC = 0,3,
LSP = 10 Hz, HSP = 100 Hz, itH = 1,0.
3. Catulah simpul LI1 dengan sumber 24 V.
4. Ukurlah tegangan, arus, dan frekuensi luaran beban (dengan multimeter, ampermeter, dan frekuensimeter)
5. Lakukan setting LSP menjadi 20 Hz, kemudian lakukan seperti langkah 4.
6. Ulangi setting LSP secara bertahap dengan step 10 Hz, kemudian lakukan langkah 4 untuk setiap perubahan frekuensi.
7. Kembalikan Menu pada posisi rdy.
8. Tekan tombol STOP.

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 18
FUNGSI DISPLAY DAN TOMBOL-TOMBOL

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 19
STRUKTUR MENU

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 20
PEMROGRAMAN

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 21

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 22

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 23

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 24

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 25
PENGATURAN MOTOR INDUKSI TANPA BEBAN DENGAN ALT312
A. Tujuan
1. Mengoperasikan pengaruh waktu akselerasi dan deakselerasi (ACC dan dEC) terhadap putaran motor induksi 3 fasa.
2. Mengoperasikan pengaruh arus dan waktu pengereman injeksi (Idc dan tdc) terhadap putaran motor induksi 3 fasa.
B. Alat dan Bahan
1. Modul Altivar-312 ....................................................................... 1 unit
2. Motor induksi 3 fasa 220/380 V, 0,75 kW .......................................... 1 unit
4. Ampermeter AC ........................................................................... 1 unit
5. Multimeter ......................................................................... 1 unit
6. Frekuensimeter .......................................................................... 1 unit
C. Rangkaian Percobaan

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 26
D. Langkah Kerja
Cermati terminal-terminal pada unit Altivar sesuai Gambar Rangkaian Percobaan di
atas.
Rangkaian unit Altivar sesuai dengan Gambar Rangkaian.
Perhatikan dengan cermat pemasangan: potensiometer, sakelar LI1 dan LI2.
Rangkailah motor induksi 3 fasa dengan sambungan bintang ( Y ), kemudian
hubungkan dengan ATV312.
Percobaan 1 : Mengoperasikan Alivar dengan Motor Induksi tanpa Beban
1. Hubungkan selektor sumber daya.
2. Kembalikan semua parameter pada kondisi preset.
3. Set-lah parameter arus, tegangan, dan frekuensi nominal dari motor induksi pada
ATV312 (ItH, UnS, dan FrS) [Pada Menu drC]
4. Set-lah frekuensi luaran maksimum ATV312 dengan mengatur parameter tFr, tentukan sebesar 100 Hz.
5. Set-lah parameter LSP (putaran motor terendah) pada 10 Hz dan HSP (putaran motor tertinggi) pada 100 Hz.
6. Kembalikan parameter pada posisi rdy.
7. Piculah LI1 dengan tegangan 24 V, kemudian :
Atur parameter FrH (frekuensi setpoin) secara bertahap sesuai Tabel
Percobaan dengan mengatur potensiometer.
Ukurlah frekuensi, tegangan, arus, dan putaran motor untuk setiap tahapan
frekuensi setpoin
8. Tekan tombol STOP.
Percobaan 2 : Mengoperasikan Arus dan Waktu Injeksi, serta waktu Akselerasi
dan Deakselerasi
1. Jangan diubah setting parameter pada percobaan 1 untuk FrH sebesar 50 Hz dan
100 Hz.
2. Atur setting Idc, tdc, ACC, dEC dari kondisi factory preset sampai dengan
minimumnya sebanyak 5 tahapan.
3. Lakukan langkah 6 sampai dengan 8 dari percobaan 1 di atas.
Catatan untuk pemrograman Idc & tdc
Parameter can be accessed if [Type of stop] (Stt) = [DC injection] (dCI) or if [DC injection assign.] (dCI) is not set to [No] (nO). (halaman 66,67).
After 5 seconds, the injection current is limited to 0.5 [Mot. therm. current] (ItH)
if set to a higher value.
L13 untuk logika pengereman.

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 27

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 28
LEMBAR PENGAMATAN
Karakteristik Altivar 312
fo (Hz) Pembacaan FrH
Vo (volt)
Io (mA)
fo (Hz)
10
20
30
40
50
60
Pengaturan Motor Induksi Tanpa Beban dengan ATV312
Tabel 1 Pengaturan FrH = 20 – 100 Hz.
fo (Hz) Pembacaan FrH
Nilai Parameter
LCr (A) Vo (V) n (rpm)
20
40
50
60
80
100
Tabel 2 Untuk FrH = 50 Hz
FrH : 50 Hz Nilai Parameter
LCr (A) Vo (V) n (rpm)
Idc tdc ACC dEC L13 OFF L13 ON L13 OFF L13 ON L13 OFF L13 ON
Tabel 3. Untuk FrH = 100 Hz.
FrH : 100 Hz Nilai Parameter
LCr (A) Vo (V) n (rpm)
Idc tdc ACC dEC L13 OFF L13 ON L13 OFF L13 ON L13 OFF L13 ON

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 29
Komentar Hasil Pengamatan:

Modul Pelatihan Aplikasi Elektronika Daya Untuk Pengaturan Motor Induksi 30
1. Modifikasi Rangkaian Pemicu TCA 785
2. Pengembangan Unit Modul ATV 312


















