UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE...
105
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS Facultad del Medio Ambiente y Recursos Naturales Ingeniería Topográfica TÉSIS DE INGENIERÍA TOPOGRÁFICA METODOLOGÍA PARA EL ANÁLISIS Y VERIFICACIÓN DE LEVANTAMIENTOS TOPOGRÁFICOS MEDIANTE LA TECNOLOGÍA NTRIP PARA LA INCORPORACIÓN A LA CARTOGRAFÍA DEL DISTRITO CAPITAL. Autores: Topógrafo. Luis Armando Villamizar Pulido. Topógrafo. Luis Felipe Mantilla Vargas. Director: Ing. M.Sc. William Barragan Zaque. Revisor: Ing. Robinson Quintana Puentes. Bogotá D.C., Colombia. Octubre de 2016.
Transcript of UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE...

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
Facultad del Medio Ambiente y Recursos Naturales
Ingeniería Topográfica
TÉSIS DE INGENIERÍA TOPOGRÁFICA
METODOLOGÍA PARA EL ANÁLISIS Y VERIFICACIÓN DE LEVANTAMIENTOS
TOPOGRÁFICOS MEDIANTE LA TECNOLOGÍA NTRIP PARA LA
INCORPORACIÓN A LA CARTOGRAFÍA DEL DISTRITO CAPITAL.
Autores: Topógrafo. Luis Armando Villamizar Pulido.
Topógrafo. Luis Felipe Mantilla Vargas.
Director: Ing. M.Sc. William Barragan Zaque.
Revisor: Ing. Robinson Quintana Puentes.
Bogotá D.C., Colombia.
Octubre de 2016.

Nota de aceptación.
_____________________________________
_____________________________________
_____________________________________
_____________________________________
_____________________________________
_____________________________________
_____________________________________
Firma del jurado.
_____________________________________
Firma del jurado.
Bogotá D.C, 21 de Octubre de 2016.
Resumen.
Para la ciudad de Bogotá D.C. se requiere incorporar planos topográficos a la cartografía del Distrito Capital, como insumo en el proceso de trámites de la cadena urbanística, al solicitar las licencias de urbanismo o construcción, partiendo del Levantamiento Topográfico.
En la actualidad la Topografía ha desarrollado grandes avances tecnológicos,
principalmente la amplia difusión del empleo de los sistemas de posicionamiento
satelital GNSS (Global Navigation Satellite System), que se adaptan en función de
la verificación de la información obtenida en campo, en este caso para los
Levantamientos Topográficos, utilizando la tecnología GPS vía internet – NTRIP-.
Para la verificación de los Levantamientos Topográficos se empleó esta tecnología,
que trata de un protocolo basado en la Transferencia de Hipertexto HTTP,
desarrollado para distribuir flujos de datos GNSS a receptores móviles o estáticos a
través de Internet, en la cual se busca garantizar una buena precisión, para generar
cartografía en el Distrito Capital.
Palabras Clave: NTRIP, GNSS, HTTP, Levantamiento Topográfico, Planos
Topográficos.

ABREVIATURAS.
CORS Estaciones de Referencia de Operación Continua.
DGPS Sistema Diferencial de Posicionamiento Global.
EDGE Tasas de Datos Mejoradas para la Evolución de GSM.
GLONASS Sistema Global de Navegación por Satélite Unión Soviética.
GNSS Sistema Global de Navegación por Satélite.
GPS Sistema de Posicionamiento Global.
GPRS Servicio General de Paquetes Vía Radio.
GSM Sistema Global para las Comunicaciones Móviles.
HTML Lenguaje de Marcas de Hipertexto.
3D Tridimensional.
BKG Agencia Federal Alemana de Cartografía.
Bps Bits por Segundo.
C/A Código Adquisición Aproximada (1,023 MHz).
Código-P Código Precisión (10,23 MHz).
Código-M Código Militar.
RTCM Comisión Técnica de Radio para Servicios Marítimos.
RTK Posicionamiento Cinemático en Tiempo Real.
SA Disponibilidad Selectiva.
SPS Servicio de Posicionamiento Estándar.
SV Vehículo Espacial.
TRANSIT Sistema de Navegación por Satélite Marina.
UMTS Sistema Universal de Telecomunicaciones Móviles.

UTC Tiempo Universal Coordinado.
VRS Estación de Referencia Virtual.
HTTP Protocolo de Transferencia de Hipertexto.
IGS Servicio Internacional de GNSS.
IP Puerto de Instrumentación.
ITRF Marco Internacional de Referencia Terrestre.
L1 GPS Frecuencia de la Portadora, 1575.42 MHz.
L2 GPS Frecuencia de la Portadora, 1227,6 MHz.
L2C Señal Civil en L2.
L2M Código Militar en L2.
L5 Enlace 5, Frecuencia de Portadora = 1176.45 MHz.
NAVSTAR Navegación Satelital por Tiempo y Distancia.
NTRIP Red para Transporte de RTCM. Protocolo de Internet.
PDOP Posición Dilución de Precisión.
PPP Punto por Posicionamiento Preciso.
PPS Servicio de Posicionamiento Preciso.
RINEX Formato Receptor tipo Independiente.
RMS Error Medio Cuadrático.
Rover GPS de Precisión en un Punto Circundante al GPS Base.
Índice General.
1. INTRODUCCIÓN. ....................................................................................................... 12
1.1. Estado del Arte o Antecedentes. ....................................................................... 13
1.1.1. Experimento de la Tecnología RTK- NTRIP en Diferentes Aplicaciones. .... 15
1.2. Planteamiento del Problema. ............................................................................. 16
1.3. Objetivos. .......................................................................................................... 16
1.3.1. Objetivo General. ........................................................................................ 16
1.3.2. Objetivos Específicos. ................................................................................ 16
1.4. Pregunta de Investigación e Hipótesis. .............................................................. 17
1.4.1. Pregunta de Investigación. ......................................................................... 17
1.4.2. Hipótesis de Investigación. ......................................................................... 17
1.5. Delimitación y Alcance. ...................................................................................... 18
1.5.1. Alcance Temático. ...................................................................................... 18
1.5.2. Alcance Temporal. ...................................................................................... 18
1.5.3. Alcance Espacial. ....................................................................................... 18
1.6. Justificación del Proyecto. ................................................................................. 19
1.6.1. Justificación Social. .................................................................................... 20
1.6.2. Justificación Teórica. .................................................................................. 20
1.6.3. Justificación Práctica. ................................................................................. 20
1.7. Organización del Documento. ............................................................................ 21
2. METODOLOGÍA PARA EL ANÁLISIS Y VERIFICACIÓN DE LEVANTAMIENTOS
TOPOGRÁFICOS MEDIANTE LA TECNOLOGÍA NTRIP. .......................................... 22
2.1. Fundamento Teórico, Evolución y Generalidades sobre la Geodesia Espacial. . 22
2.2. Dátum. ............................................................................................................... 23
2.3. Sistemas de Posicionamiento Global por Satélite. ............................................. 24
2.3.1. Navstar-Gps. .............................................................................................. 25
2.3.2. Glonass-Gnss. ............................................................................................ 26
2.3.3. Galileo. ....................................................................................................... 27
2.4. Fundamentos del NTRIP. .................................................................................. 27
2.4.1. Operatividad en Campo. ............................................................................. 29
2.4.2. Validación de Resultados. .......................................................................... 30

2.5. Redes de Estaciones Permanentes GPS. ......................................................... 33
2.5.1. Evolución del Marco de Referencia en América. ......................................... 33
2.5.2. Proyecto SIRGAS. ...................................................................................... 34
2.6. Red de Estaciones Permanentes para Colombia. .............................................. 34
2.6.1. Pregeored. .................................................................................................. 35
2.6.2. Igeored. ...................................................................................................... 36
3. DESCRIPCIÓN DE LA METODOLOGÍA. .................................................................... 37
3.1. Inventario de la Metodología. ............................................................................. 37
4. DESARROLLO DE LA METODOLOGÍA. .................................................................... 41
4.1. Fase 1- Identificación de Levantamiento Topográfico Sujeto a Verificación. ...... 41
4.1.1. Definición de Polígono para Incorporación Topográfica: ............................. 41
4.1.2. Localización de Zonas para Desarrollar el Proyecto. .................................. 42
4.2. Fase 2 – Trabajo de Campo. ............................................................................. 45
4.2.1. Planificación del Trabajo de Campo. .......................................................... 45
4.2.2. Verificación de Levantamiento Topográfico. ............................................... 45
4.2.3. Aplicabilidad de la Tecnología NTRIP. ........................................................ 45
4.2.4. Equipo Utilizado para el Desarrollo de la Metodología. ............................... 46
4.2.5. Configuración del Colector. ........................................................................ 48
4.2.6. Procedimiento en la Toma de Información en Campo. ............................... 52
4.2.7. Descargue Información. .............................................................................. 55
4.3. Fase 3 – Post-proceso de Información. ............................................................. 57
4.3.1. Traslado Sistema de Referencia Levantamiento. ........................................ 57
4.3.2. Modelo de Velocidades Empleado-Software Magna Sirgas 3.0. ................. 59
4.3.3. Resultados procesamiento cambio época en Placas IGAC. ....................... 65
4.3.4. Procesamiento Datos Crudos. .................................................................... 66
4.3.5. Diagrama de Flujo. ..................................................................................... 70
5. RESULTADOS. ........................................................................................................... 71
5.1. Datos Usados. ................................................................................................... 71
5.2. Análisis. ............................................................................................................. 72
5.2.1. Iteraciones para el Modelo Matemático. ..................................................... 74
5.3. Validación. ......................................................................................................... 76
5.4. Aplicación del Módelo. ....................................................................................... 85

5.5. Resultados. ....................................................................................................... 85
6. CONCLUSIONES. ...................................................................................................... 92
6.1. Conclusiones. .................................................................................................... 92
6.2. Aportes Originales. ............................................................................................ 93
6.3. Limitaciones. ..................................................................................................... 94
A. REGISTRO FOTOGRÁFICO. ...................................................................................... 96
B. PLANOS TOPOGRÁFICOS FINALES....................................................................... 101
BIBLIOGRAFÍA. ............................................................................................................. 104

Índice de Ilustraciones.
Ilustración 1. Ubicación de Levantamientos Topográficos. ............................................................. 19
Ilustración 2. Dátum. ........................................................................................................................ 24
Ilustración 3. Arquitectura del N-TRIP. ........................................................................................... 29
Ilustración 4. Configuración Instrumental ....................................................................................... 32
Ilustración 5.Composición Plano Topográfico y Puntos Ntrip. ....................................................... 42
Ilustración 6. Plano de Incorporación Topográfica. ........................................................................ 42
Ilustración 7 Composición Plano Topográfico y Puntos Ntrip. ....................................................... 43
Ilustración 8. Plano de Incorporación Topográfica. ........................................................................ 43
Ilustración 9 Composición Plano Topográfico y Puntos Ntrip. ....................................................... 44
Ilustración 10. Plano de Incorporación Topográfica. ...................................................................... 44
Ilustración 11. Arquitectura y Señal NTRIP. .................................................................................... 46
Ilustración 12. Antena GPS GR-5. .................................................................................................... 47
Ilustración 13. Pantalla Inicio GR-5. ............................................................................................... 48
Ilustración 14. Acceso red WI-FI. ..................................................................................................... 49
Ilustración 15. Nuevo Trabajo. ......................................................................................................... 49
Ilustración 16.Configuración Método N-TRIP. ................................................................................ 50
Ilustración 17. Configuración Rover- Base. ..................................................................................... 50
Ilustración 18. Parámetros Radio. .................................................................................................... 51
Ilustración 19. Configuración Registro Puntos. ............................................................................... 51
Ilustración 20. Conexión CORS. ....................................................................................................... 52
Ilustración 21. Antenas Topcon Referencia GR-5. ........................................................................... 53
Ilustración 22. Armado de equipo..................................................................................................... 54
Ilustración 23. Toma de puntos y conexión. ..................................................................................... 54
Ilustración 24. Plataforma Descargue Datos. .................................................................................. 55
Ilustración 25. Plataforma Descargue Datos. .................................................................................. 55
Ilustración 26. Formato de Descargue. ............................................................................................ 56
Ilustración 27. Descargue Datos. ..................................................................................................... 56
Ilustración 28. Cargue de Archivos DWG. ....................................................................................... 57
Ilustración 29. Cambio de formato DWG a SHP. ............................................................................. 58
Ilustración 30. Cambio de Origen. ................................................................................................... 58
Ilustración 31. Cargue de Archivos. ................................................................................................. 59
Ilustración 32. Modelo Velocidades para las Américas. .................................................................. 59
Ilustración 33. Transformación Coordenadas geográficas a geocéntricas CD-589-USME. ........... 60
Ilustración 34.Transformación coordenadas geográficas a geocéntricas época 1995.4 Bogotá-9. 61
Ilustración 35. Cálculo velocidades de las coordenadas geocéntricas cd-usme-589. ...................... 61
Ilustración 36. Cálculo velocidades de las coordenadas geocéntricas Bogotá-9. ........................... 62
Ilustración 37. Transformación geocéntricas-planas locales cd-usme-589 época 2016. ................. 62
Ilustración 38. Transformación geocéntricas-planas locales cd-usme-589 época 2016. ................. 63
Ilustración 39. Cálculo ondulación geoidal cd-usme-589. ............................................................... 63
Ilustración 40. Cálculo ondulación geoidal Bogotá-9. ..................................................................... 64
Ilustración 41. Diagrama de Flujo. .................................................................................................. 70
Ilustración 42. Nube Puntos. ............................................................................................................ 71
Ilustración 43. Análisis de Datos. ..................................................................................................... 72
Ilustración 44. Coeficiente de Correlación. ...................................................................................... 72
Ilustración 45. Matriz de Correlación. ............................................................................................. 73
Ilustración 46. Regresión. ................................................................................................................. 74
Ilustración 47. Regresión. ................................................................................................................. 75
Ilustración 48. Datos Estadísticos. ................................................................................................... 76
Ilustración 49. Datos Estadísticos. ................................................................................................... 76
Ilustración 50. Datos Estadísticos. ................................................................................................... 77
Ilustración 51. Datos Estadísticos. ................................................................................................... 77
Ilustración 52. Datos Estadísticos. ................................................................................................... 78
Ilustración 53. Datos Estadísticos. ................................................................................................... 78
Ilustración 54. Datos Estadísticos. ................................................................................................... 79
Ilustración 55. Datos Estadísticos. ................................................................................................... 79
Ilustración 56. Datos Estadísticos. ................................................................................................... 80
Ilustración 57. Datos Estadísticos. ................................................................................................... 81
Ilustración 58. Datos Estadísticos. ................................................................................................... 82
Ilustración 59. PDOP vs número de satélites. .................................................................................. 83
Ilustración 60. Análisis Estadístico. ................................................................................................. 83
Ilustración 61. Error HRMS. ............................................................................................................ 84
Ilustración 62. Posicionamiento Vértice Igac Bogotá 9. .................................................................. 96
Ilustración 63. Posicionamiento Vértice Igac CD-USME-589. ........................................................ 97
Ilustración 64. Posicionamiento Levantamiento Predio Usme. ........................................................ 98
Ilustración 65. Posicionamiento Levantamiento Predio CL 127. ..................................................... 99
Ilustración 66. Posicionamiento Levantamiento Predio Lares. ...................................................... 100
Ilustración 67. Plano Topográfico Final Predio Usme. ................................................................. 101
Ilustración 68. Plano Topográfico Final Predio Lares. ................................................................. 102
Ilustración 69. Plano Topográfico Final Predio CL 127. .............................................................. 103

Índice de Tablas.
Tabla 1. Inventario de la Metodología. ............................................................................................ 40
Tabla 2. Traslado Época Placas Igac. .............................................................................................. 65
Tabla 3. Diferencias Finales Placas Igac. ........................................................................................ 66
Tabla 4. Datos crudos Levantamiento predio Usme. ........................................................................ 67
Tabla 5. Datos organizados por tiempo de lectura origen Magna Colombia Bogotá. ..................... 67
Tabla 6. Datos organizados por tiempo de lectura origen Magna Ciudad Bogotá. ......................... 67
Tabla 7. Datos crudos en Excel Levantamiento predio CL 127. ...................................................... 68
Tabla 8. Datos organizados por tiempo de lectura origen Magna Colombia Bogotá. ..................... 68
Tabla 9. Datos organizados por tiempo de lectura origen Magna Ciudad Bogotá. ......................... 68
Tabla 10. Datos crudos en Excel Levantamiento predio Lares. ....................................................... 69
Tabla 11. Datos organizados por tiempo de lectura origen Magna Colombia Bogotá. .................. 69
Tabla 12. Datos organizados por tiempo de lectura origen Magna Ciudad Bogotá. ....................... 69
Tabla 13. Aplicación Modelo. ........................................................................................................... 85
Tabla 14. Coordenadas Magna Colombia Bogotá-CLL 127. ........................................................... 86
Tabla 15. Coordenadas Magna Ciudad Bogotá-CLL 127. ............................................................... 86
Tabla 16. Diferencias Métodos Levantamientos CL127. .................................................................. 87
Tabla 17. Coordenadas Magna Colombia Bogotá-LARES. ............................................................. 87
Tabla 18. Coordenadas Magna Ciudad Bogotá-LARES. ................................................................. 88
Tabla 19. Diferencias Métodos Levantamientos Lares. .................................................................... 88
Tabla 20. Coordenadas Magna Colombia Bogotá-USME. .............................................................. 89
Tabla 21. Coordenadas Magna Ciudad Bogotá-USME. .................................................................. 90
Tabla 22. Diferencias Métodos Levantamientos Usme. .................................................................... 91
Índice de Ecuaciones.
Ecuación 1.Error Típico Predicción. ................................................................................................ 84
Ecuación 2. Error Típico. ................................................................................................................. 84

CAPITULO 1. INTRODUCCIÓN.
12
CAPITULO 1.
1. INTRODUCCIÓN.
Este proyecto se fundamenta en la necesidad de verificación en campo de los
Levantamientos Topográficos, por parte de los usuarios que requieran la
incorporación a la cartografía del Distrito Capital, implementando una metodología
que garantice las señales de radio en zonas donde la topografía del terreno es muy
ondulada o montañosa o ante la presencia de otro tipo de obstrucciones naturales
o artificiales, factores que inciden en la realización de Levantamientos Topográficos
para la ciudad de Bogotá.
Esta metodología pretende utilizar la tecnología de posicionamiento GNSS, en
Tiempo Real, dentro del contexto de las mediciones GNSS, siendo necesario acudir
a una clasificación de los procedimientos observacionales con estos sistemas
satelitales, para posteriormente identificar las opciones que el tiempo real nos ofrece
aplicando la tecnología GPS vía internet - NTRIP.
El desarrollo de esta metodología permite ser aplicada en zonas urbanas y rurales,
independiente de los factores que obstruyan la señal dado que se apoya en la
obtención de datos GPS a través de internet, de fácil acceso y disponibilidad,
teniendo claro el desarrollo de los sistemas de acceso a internet móvil a través de
los diferentes canales de comunicación.
Esta técnica puede presentar limitaciones en cuanto a la eficacia en la transmisión
de la señal entre el móvil y la base permanente, ya que son elementos de-
terminantes en el proceso de verificación del Levantamiento Topográfico.
Adicionalmente se pueden presentar errores sistemáticos en la obtención de datos
como consecuencia de factores climáticos y de estructuras que interfieran en el
radio de cobertura de la señal. (Autoría, 2016.).

CAPITULO 1. INTRODUCCIÓN.
13
1.1. Estado del Arte o Antecedentes.
La incorporación de Levantamientos Topográficos a las bases de datos geográficas
del Distrito, consiste en la representación gráfica de un terreno, base técnica para
dar inicio en la cadena de trámites para la obtención de la Licencia Urbanística.
(Norma UAECD: Resolucion Num. 813, 2010).
El objeto de la incorporación topográfica es el estudio de área y linderos del predio
objeto del Levantamiento Topográfico y el señalamiento de las zonas de reserva
que recaen sobre el predio, las cuales serán la base técnica a ser tenida en cuenta
en los procesos de carácter urbanístico.
Un Levantamiento Topográfico en un proyecto de construcción, que para nuestro
caso, se trata de una operación que puede originarse producto de la obtención de
la licencia de construcción o de urbanismo de acuerdo a las dimensiones del
proyecto o como consecuencia de una negociación, o de la adquisición de un predio
de características urbanas o rurales y en algunos casos en suelo de expansión, y
que lógicamente se planea construir, siendo el punto de partida para una serie de
etapas básicas dentro de la identificación y señalamiento del predio. (Autoría,
2016.).
El Levantamiento Topográfico ha evolucionado en los últimos tiempos
incorporando estaciones robot y GPS, que hacen fácil y más preciso cualquier
levantamiento, esta evolución está ligada a los adelantos tecnológicos, derivados
de la exigencia de obtener mayores precisiones en los trabajos de la Topografía que
exige grandes detalles (proyectos de infraestructura) se pasa a la Topografía de
detalle, planos de municipios y manzanas catastrales o Topografía Industrial de
pequeñas escalas a grandes escalas. Estos cambios de enfoque de los planos
topográficos, impulsa los desarrollos tecnológicos, que se reflejan en mejoras de
equipos, de métodos y de cálculos. (Farjas, 2003.).
El Plano Topográfico consiste en la representación generalmente parcial o del
relieve de la superficie terrestre a una escala definida, los planos topográficos a
analizar en la implementación de esta metodología, proceden de la Base
Cartográfica del Distrito los cuales han sido objeto del trámite de incorporación
topográfica a la cartografía oficial del distrito.
Para la implementación de esta metodología se realizó una revisión exhaustiva de
varias bases de datos sobre trabajos de grado de la Universidad Distrital, tanto en
el proyecto curricular de Ingeniería Topográfica como en Ingeniería Catastral y

CAPITULO 1. INTRODUCCIÓN.
14
Geodesia, se comprobó que aunque se han presentado documentos que buscan
hacer actualizaciones catastrales, mejoramiento de los métodos de captura de
información catastral, levantamientos topográficos con fines de actualización
catastral, ninguno de estos hace una propuesta de revisión y certificación por parte
de los entes encargados de este ámbito a nivel local o municipal, de los
levantamientos topográficos entregados por el público en general, con el fin de
adelantar los tramites respectivos de cada persona.
De esta forma presentamos de manera formal nuestra propuesta de trabajo, la cual
consiste en crear un mecanismo de revisión en campo de los levantamientos
topográficos presentados por los usuarios en general, que requieren adelantar el
trámite de incorporación de planos topográficos ante la Unidad Administrativa
Especial de Catastro Distrital.
La selección de la implementación de una metodología de verificación en campo de
los Levantamientos Topográficos, parte de los profesionales de la Topografía que
requieren verificación en los polígonos representados en los planos topográficos y
ven la necesidad que se determine la calidad y veracidad de la información,
mediante equipos que garanticen la calidad la obtención de una información sólida
y veraz.
Esta metodología se apoyará en la técnica GPS vía internet – NTRIP y pretende
servir como guía para la verificación en campo del resultado de los diferentes
procesos y post-procesos realizados a los Levantamientos Topográficos para
generar el Polígono que define el predio objeto de la incorporación, identificando los
vértices que determinan el predio a incorporar o modificar en la Base Cartográfica
del Distrito. (Alvarez C. , 2014.).
La verificación en campo del Levantamiento Topográfico debe establecer que el
polígono del predio, y la identificación de los mojones estén referenciados al
Sistema de Referencia MAGNA SIRGAS, coordenadas planas cartesianas, origen
Bogotá y presenten correspondencia con lo descrito en el cuadro de coordenadas
identificando los mojones y coordenadas de lo planteado en el Plano Topográfico.
Un concepto interesante es analizar cómo la discreción en la toma de datos de
campo va dejando paso a la recepción de datos continua o casi continua (equipos
GPS en RTK y sistemas escáner – laser 3D). El operador tomaba puntos uno a uno
con una observación independiente. Con la toma de puntos continua para nuestro
caso la tecnología GPS vía internet - NTRIP, agiliza el trabajo, no requiere la
empleabilidad de toda una comisión de topografía y se recoge un mayor número de
puntos en menor tiempo y con una precisión absoluta mayor, fruto de menores

CAPITULO 1. INTRODUCCIÓN.
15
encadenamientos de redes. (Hoyer, Experiencias Personales de NTRIP en
Venezuela., 2010.).
El Topógrafo se convierte en todo este proceso en manipulador de datos, que ha de
ser capaz de proceder a la decisión de su captura, a su análisis y a su interpretación.
(Farjas, 2003.).
1.1.1. Experimento de la Tecnología RTK- NTRIP en Diferentes Aplicaciones.
A continuación se describen diferentes aplicaciones con sus resultados, para
determinar la fiabilidad del NTRIP a diferentes distancias entre la Base y el Rover,
obteniendo coordenadas en Tiempo Real RTK, usando NTRIP como método de
recepción de las señales correctoras, y en el mismo punto realizar un levantamiento
Estático, aplicar el post proceso, y comparar los resultados, evaluarlos y dictar un
criterio que en base a los estándares actuales de catastro y topografía, nos permita
confirmar que el NTRIP es la herramienta adecuada. También se comparan costos,
tiempo y facilidad de uso en el levantamiento. Se examinarán las precisiones y
exactitudes exigidas por la ley de Geografía y Tierras y el reglamento de Catastro,
para encontrar el lugar exacto que NTRIP pudiese tener dentro de los procesos de
medición de redes municipales y predios de tipo rural o urbano. (Hoyer,
Experiencias Personales de NTRIP en Venezuela., 2010.).
La tarea fue que en cada punto se tomó una observación Estática, que fue al día
siguiente post procesada en la oficina, y en el mismo punto, con el mismo Z-MAX
se observaron las coordenadas en Tiempo Real RTK corregidas mediante NTRIP.
También en algunos puntos medimos con el receptor Promark 3 RTK de una sola
frecuencia para observar su comportamiento y comparar algunos resultados. La ruta
fue desde Chacao, vía la Castellana, con parada en un punto de control REGVEN
Terraza2 en la Cota 1000, para continuar vía Guarenas, Guatire, hasta poco más
allá de la salida del túnel ya cerca de Kempis-Chuspita, a unos 42 Km de la base
donde ya la señal de Movistar no llegaba, por lo cual no tenía sentido apartarnos
más distancia de la base. En los lugares considerados seguros, como alcabalas,
estaciones de servicio, peajes etc., nos paramos y tomamos puntos estáticos y
lecturas RTK. Durante la mayor parte del trayecto se recibieron en forma dinámica
las posiciones y salvo tramos con mucha vegetación o taludes pronunciados que
obstaculizaban la visibilidad de satélites al paso por la vía, se obtuvieron lecturas
con errores en el orden de 3 o 4 cm, es decir soluciones FIJAS, con toda la
ambigüedad resuelta, al paso debajo de los árboles, se degradaba la precisión, pero

CAPITULO 1. INTRODUCCIÓN.
16
en estado flotante de unos +-15 cm RMS, rápidamente regresaba a la solución FIJA
en forma dinámica, una vez pasados los obstáculos. El regreso se hizo por la misma
vía para terminar en el punto REGVEN La Carlota donde se realizaron algunos
experimentos de tiempo de convergencia y exactitud.
Los resultados obtenidos en el tiempo de convergencia dentro de Caracas, es decir
a menos de 10 Km de la base fue casi instantáneo, siempre por debajo de los 10
segundos, y a más de 20 Km de la base, tardó cerca de 1 minuto en mostrar la
solución centimétrica, y a los 36 Km el tiempo de convergencia para obtener una
solución FIJA estuvo alrededor de los 3 minutos, desde el encendido inicial del
receptor. Una vez obtenida la solución FIJA, el receptor la mantenía incluso con el
vehículo en movimiento, y la degradación ocasionada por los árboles, hacía que la
solución FLOTARA, pero rápidamente, en unos segundos de nuevo, teníamos la
solución FIJA. (Márquez Prieto, 2013.).
1.2. Planteamiento del Problema.
Verificación en campo de los Levantamientos Topográficos para la Incorporación a
la cartografía oficial del Distrito Capital.
1.3. Objetivos.
1.3.1. Objetivo General.
Implementar una metodología para realizar la verificación en campo de la
información presentada en Levantamientos Topográficos de la Incorporación
Cartográfica a las Bases de Datos Geográficas del Distrito Capital.
1.3.2. Objetivos Específicos.
Establecer el procedimiento, requisitos y equipos a utilizar, para determinar
la aceptación de los Levantamientos Topográficos.

CAPITULO 1. INTRODUCCIÓN.
17
Identificar los requisitos base para la calidad de la información suministrada
en los Levantamientos Topográficos; referenciados a los Dátum horizontal y
vertical oficial para la ciudad de Bogotá.
Brindar una alternativa de solución para detallar los posibles problemas de
posicionamiento y procedimientos en la elaboración de los Levantamientos
Topográficos.
Conocer las características que tiene la tecnología NTRIP, con respecto a la
optimización y calidad de datos obtenidos, frente a una comisión de
topografía convencional.
1.4. Pregunta de Investigación e Hipótesis.
1.4.1. Pregunta de Investigación.
¿Cuál es la metodología que se debe implementar para la verificación en campo de
Levantamientos Topográficos para su Incorporación Cartográfica a las Bases de
Datos Geográficas del Distrito Capital?
1.4.2. Hipótesis de Investigación.
El presente estudio se basa en las siguientes hipótesis:
Al emplear la tecnología NTRIP en las áreas urbanas, a través de la señal de
internet, es posible mejorar la calidad de la información, mejorando los
tiempos de obtención y entrega de información.
Al plantear la metodología, los estudiantes de la Universidad Distrital
Francisco José de Caldas, obtendrán una guía que les facilite utilizar los
equipos de última tecnología GPS, como son las antenas GR5 Topcon.
CAPITULO 1. INTRODUCCIÓN.
18
1.5. Delimitación y Alcance.
1.5.1. Alcance Temático.
La propuesta de investigación, se desarrolla con el método hipotético deductivo,
debido a que se busca una aproximación a la solución del problema de verificación
de Levantamientos Topográficos, por cuanto se necesita consultar información
sobre requisitos y aplicaciones de normas para verificación en campo de
Levantamientos Topográficos de diferentes áreas de la ingeniería. (Chubb, 1984.).
El aporte al Ingeniero Topográfico se basa en la fundamentación y aplicación de la
técnica NTRIP como una nueva metodología, para hacer más eficiente su labor y
está enfocado principalmente en aportar y contribuir, en la veracidad de la
información que entrega el profesional de la topografía como insumo en la cadena
de trámites del proceso urbanístico de la ciudad, enfocado en el perfil del Ingeniero
Topográfico y desde el ámbito de ciudad ayudara al desarrollo de la misma. (Autoría,
2016.).
1.5.2. Alcance Temporal.
Mediante un Levantamiento Topográfico, aplicando la tecnología NTRIP, determinar
las coordenadas planas cartesianas de diferentes Levantamientos Topográficos que
han sido objeto de la incorporación de planos topográficos a la cartografía oficial del
Distrito Capital y proceder a realizar una comparación de están coordenadas y
determinar la mejor aproximación a la realidad. (Autoría, 2016.).
A través de la metodología, describir la forma de configurar los equipos que permitan
utilizar la tecnología NTRIP, manipulación del software necesario compatible con
NTRIP y conexión con el celular, incorporando la señal de internet.
1.5.3. Alcance Espacial.
La extensión geográfica dentro de la cual se encuentran los Levantamientos
Topográficos, se localizan en la ciudad de Bogotá D.C., en el departamento de
Cundinamarca, distribuidos en el casco urbano de la ciudad.

CAPITULO 1. INTRODUCCIÓN.
19
Ilustración 1. Ubicación de Levantamientos Topográficos.
Fuente: Google Earth-Image 2016-DigitalGlobe.
.
1.6. Justificación del Proyecto.
En la actualidad la Incorporación de Levantamientos Topográficos, no implica su
verificación en campo del polígono que requiere ser incorporado, a la base
cartográfica del Distrito Capital. Por lo tanto, se hace necesario implementar un
nuevo procedimiento que garantice una mayor precisión en la información,
aportando a los procesos que se adoptan en la actualidad. (Autoría, 2016.).
La propuesta de implementar esta metodología, se enfoca específicamente en
aportar, contribuir y determinar la veracidad de la información que se entrega en la
Incorporación de planos Topográficos a la cartografía del Distrito Capital.
La verificación en campo se adopta teniendo en cuenta los Equipos Topográficos
aplicando la tecnología GPS vía internet - NTRIP, técnica adecuada para llevar a
cabo estas verificaciones, que garantizan la calidad de la obtención de una
información sólida y veraz.

CAPITULO 1. INTRODUCCIÓN.
20
Esta técnica emplea el internet como medio de difusión de toda la información que
genera y a partir de un teléfono móvil con un plan de datos básico, se puede acceder
al servicio. Básicamente la conexión se hace introduciendo una dirección IP,
estableciendo un puerto de conexión en la base permanente y el móvil o antena
GPS.
1.6.1. Justificación Social.
Los resultados del presente estudio pueden contribuir a mejorar la obtención de
información en los Levantamientos Topográficos, a partir de la optimización de
tiempo en la toma de datos y desplazamiento de personal para la ejecución del
trabajo en campo, permitiendo manipular en tiempo real los datos rinex que genera
el colector para la obtención de coordenadas y verificación de vértices que definan
un Levantamiento Topográfico.
1.6.2. Justificación Teórica.
La metodología propuesta busca guiar a los usuarios de la tecnología NTRIP, en la
forma de configurar las partes integrantes del sistema, a partir de la previa
configuración de equipos para desarrollar el trabajo de campo, descargue de datos
y posterior análisis de información mediante diferentes softwares sugeridos en el
desarrollo del estudio. Adicionalmente optimizar la utilización de los equipos con
que cuenta la universidad de última tecnología y gran utilidad para este tipo de
prácticas. (Autoría, 2016.).
1.6.3. Justificación Práctica.
De acuerdo con los objetivos de la metodología propuesta permitirá dar soluciones
reales, cuando se trata de verificar Levantamientos Topográficos, específicamente
para los planos topográficos que requieren ser incorporados a la cartografía oficial
del Distrito Capital, aprovechando el uso de la tecnología NTRIP, la cual facilita la
captura de información en sectores urbanos y rurales aprovechando la señal de
internet, hoy de fácil acceso y excelente cobertura.

CAPITULO 1. INTRODUCCIÓN.
21
1.7. Organización del Documento.
El resto del documento está organizado como sigue: En el capítulo 2, se presentan
los fundamentos teóricos que soportan la metodología, así como el estado del arte
del tema objeto de estudio. En el capítulo 3, se detalla de forma clara, cada paso a
paso del proyecto de investigación y así cualquier profesional del área este en la
capacidad de desarrollar un trabajo gracias a esta guía. En el capítulo 4, se describe
la localización del área de estudio, los datos, los métodos y los equipos que se
emplearon durante el desarrollo de la implementación de la metodología. En el
capítulo 5, presenta los resultados derivados del trabajo de campo con su respectivo
análisis. En el capítulo 6, se enuncian las conclusiones como resultado del
desarrollo de la metodología, mostrando las principales aportaciones derivadas de
la misma, en la cual se pueda ejecutar. (Autoría, 2016.).

CAPITULO 2. FUNDAMENTO TEÓRICO.
22
CAPITULO 2.
2. METODOLOGÍA PARA EL ANÁLISIS Y VERIFICACIÓN DE
LEVANTAMIENTOS TOPOGRÁFICOS MEDIANTE LA TECNOLOGÍA NTRIP.
En este capítulo se presenta una revisión y sustento de los fundamentos teóricos
que soportan la metodología, basándose en el desarrollo de la tecnología desde sus
inicios hasta llegar a las aplicaciones actuales para lograr su ejecución.
2.1. Fundamento Teórico, Evolución y Generalidades sobre la Geodesia
Espacial.
La geodesia espacial es la ciencia que se encarga de la recepción y observación de
las señales procedentes de elementos que no estén ligados directamente a la
superficie terrestre. Esta ciencia utiliza directamente los satélites artificiales.
Antiguamente los geodestas se veían limitados a distancias no superiores a 200
Km. debido a la visibilidad entre puntos. Por esta razón se utilizaba observaciones
a las estrellas para obtener una posición absoluta del punto, cuando por razones de
visibilidad no se podía realizar diferencialmente. (Técnicos., 2001).
En un simposio científico celebrado en Toronto a finales de septiembre de 1957, se
presentó la posibilidad de utilizar unos hipotéticos satélites artificiales con
aplicaciones geodésicas. Esta idea se contempló desde el escepticismo y la ironía
de los asistentes, dado lo absurdo de la idea en aquellas circunstancias de aquel
año.
Precisamente, el 4 de octubre de 1957, la URSS pone en órbita el primer satélite
artificial de la tierra: el SPUTNIK I. Dando comienzo a la Historia de la geodesia
espacial. Desde ese momento se han lanzado más de 11.000 satélites artificiales,
y los geodestas han sacado provecho, de todos los satélites, aunque no estuviese
prevista la utilización de este satélite con fines geodésicos.
Existen dos tipos de satélites: pasivos y activos.

CAPITULO 2. FUNDAMENTO TEÓRICO.
23
Pasivos: No llevan ningún tipo de mecanismo para realizar emisiones
propias; solo pueden reflejar energía que en ellos incida. En esta clase de
satélites están los globos y los provistos de prismas refractarios como los
Starlettes o Lageos.
Activos: Realizan emisiones de luz en pulsos de alta intensidad y breve
duración, repetidores de microondas, transmisiones radioeléctricas continúas
moduladas para observar cuenta Doppler, transmisión de señales de tiempo
generadas por osciladores propios del satélite, etc. Además, también pueden
llevar prismas retro reflectores pasivos para devolver señales ópticas. Los
satélites tienen un sistema de producción de energía, normalmente placas
fotovoltaicas o paneles solares. Pueden disponer también de elementos para
su control y maniobra (combustible, motores cohete, etc.). (Técnicos., 2001).
2.2. Dátum.
Está constituido por una superficie de referencia geométricamente definida,
habitualmente un elipsoide, dado por la longitud, latitud, altura, y un punto
fundamental en el que la vertical del geoide y al elipsoide sea común.
La altimetría se refiere al geoide como altura H. Es evidente que como el geoide es
una superficie irregular, sólo coincidente con el elipsoide al menos en el punto
fundamental del Dátum elegido, habrá que tener en cuenta la separación del geoide
y elipsoide, u ondulación del geoide. (Hermann Drewes, 2012).
Estableciéndose la expresión h=N+H, del sistema del satélite podemos obtener h,
pero sin una buena carta del geoide no podremos conocer N ni calcular H que es el
valor que necesitaremos para trabajar topográfica y geodésicamente. (Ilustración.
2).
Desde el punto de vista de las coordenadas de los satélites no se complica
demasiado el problema, pues solo hay que añadir a las fórmulas que daban su
posición en el sistema inercial los parámetros de rotación terrestre antes
mencionados; en cualquier caso, las coordenadas del satélite seguirán siendo
variables en función del tiempo.
Desde este sistema de referencia podemos pasar a otros, como al elipsoide, por
ejemplo, mediante un proceso matemático, obteniendo longitud, latitud y altura, una
vez conocida la orientación y situación de la superficie de referencia definida por el

CAPITULO 2. FUNDAMENTO TEÓRICO.
24
Dátum. Si conocemos la altura del geoide N sobre el elipsoide, podremos manipular
altitudes ortométricas sobre el geoide, que son las que queremos usar normalmente
porque se pueden tomar directamente.
Ilustración 2. Dátum.
Fuente: (Técnicos., 2001).
2.3. Sistemas de Posicionamiento Global por Satélite.
Se refiere al conjunto de tecnologías de sistemas de navegación por satélite que
proveen de posicionamiento geoespacial en cualquier parte del mundo y en
cualquier hora del día sin importar las condiciones climatológicas, cubriendo
grandes superficies, donde la topografía convencional no puede llegar.
Todo comenzó con la carrera espacial, con el lanzamiento del primer satélite Sputnik
I por parte de la antigua URSS en el año 1957, este transmitía señales Doppler a
estaciones con posición conocida y la órbita del satélite. Era evidente que se podía
hacer lo inverso, obtener la posición del receptor. La necesidad de obtener
posiciones en tiempo real para la navegación (saber dónde estoy), requirió de la
implementación de nuevas tecnologías e investigaciones en el campo de la
geodesia espacial.
CAPITULO 2. FUNDAMENTO TEÓRICO.
25
Los orígenes del GNSS actual se mejoraron a partir de sistemas previos, el
predecesor más reciente y exitoso del GPS, fue el sistema militar TRANSIT, en
servicio desde 1967. Su funcionamiento se basaba en el efecto Doppler, fue usado
frecuentemente para determinar redes regionales, e incluso mundiales. Estos
orbitaban en planos polares cerca de 1100km de altitud, los satélites TRANSIT
tenían afectaciones en el campo gravitacional, mucho más que el GPS. Además,
sus transmisiones de 150 y 400 MZH, eran más susceptibles al paso de la señal por
la atmosfera. TRANSIT fue discontinuado a finales de 1996 y reemplazado por el
GPS. (Técnicos., 2001).
SLR (Satellite Laser Ranging). Es un sistema de medida directa de
distancias por pulso laser a satélites provistos de prismas de reflexión total.
VLBI (Very Long Baseline Interferometry). Es una técnica que permite
calcular con precisión centimétrica la distancia entre los centros
radioeléctricos de dos o más telescopios. Se observan cuásares
extragalácticos en períodos simultáneos, comparándose
interferométricamente las señales recibidas.
DOPPLER. Se basa en la medición de la variación de distancias satélites
mediante la cuenta DOPPLER de la frecuencia de las señales recibidas.
GPS. (Global Positioning System). Es un sistema que puede trabajar con
medida directa de distancias, en sistema Doppler, o en medida de fase que
veremos en capítulos siguientes. A diferencia de los otros sistemas, este es
un sistema que tiene cobertura en cualquier parte del mundo y a cualquier
hora, ya sea por el día o por la noche.,
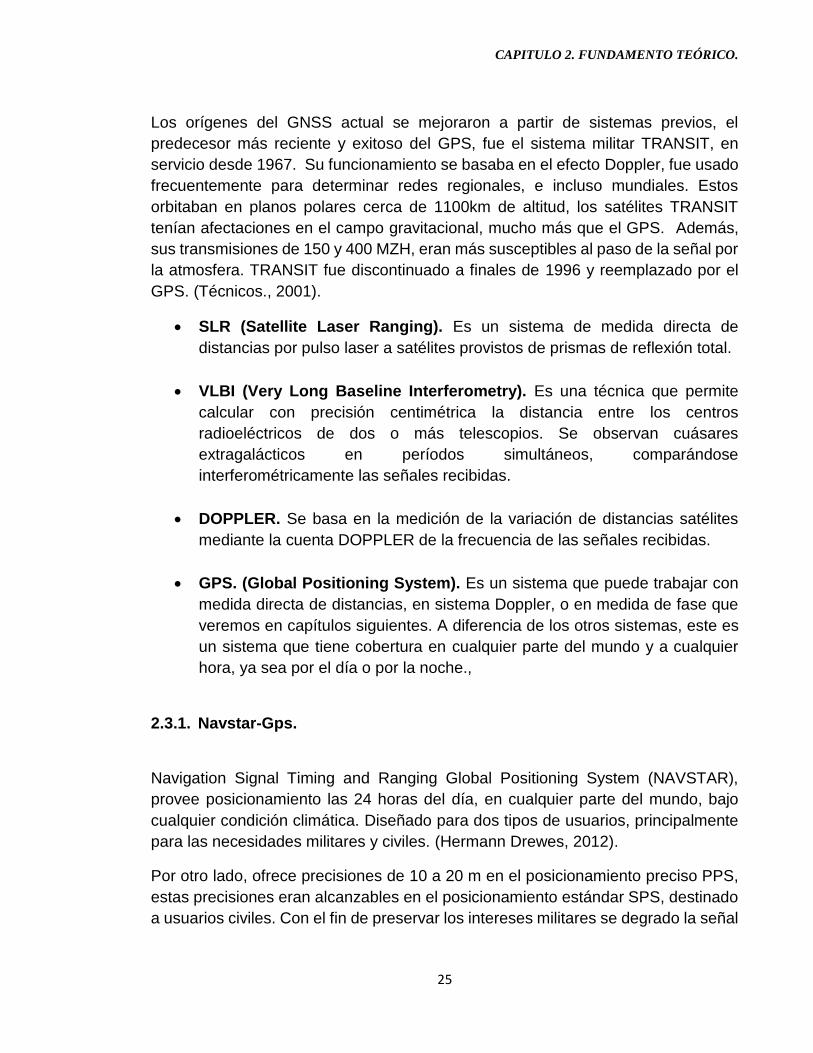
2.3.1. Navstar-Gps.
Navigation Signal Timing and Ranging Global Positioning System (NAVSTAR),
provee posicionamiento las 24 horas del día, en cualquier parte del mundo, bajo
cualquier condición climática. Diseñado para dos tipos de usuarios, principalmente
para las necesidades militares y civiles. (Hermann Drewes, 2012).
Por otro lado, ofrece precisiones de 10 a 20 m en el posicionamiento preciso PPS,
estas precisiones eran alcanzables en el posicionamiento estándar SPS, destinado
a usuarios civiles. Con el fin de preservar los intereses militares se degrado la señal

CAPITULO 2. FUNDAMENTO TEÓRICO.
26
a 100 m en el SPS, mediante lo que se denominó disponibilidad selectiva (SA), fue
activada el 25 de marzo de 1990 y apagada el 1 de mayo de 2002, bajo la dirección
del presidente de los Estados Unidos. Actualmente el PPS por código se encuentra
en 5m. Sin ir mucho en detalle los usuarios PPS tenían acceso al código P(Y) en
las dos bandas (L1-L2), mientras que usuarios SPS solo tenían acceso al código
C/A en la banda L1. La encriptación de este código empezó el 31 de junio de 1994.
(Mouron, 2008).
Este sistema cuenta con 6 planos orbitales y están inclinados 55° con respecto a la
línea del Ecuador, cada plano contiene 4 satélites, su semieje mayor es de
26660km, obteniéndose un periodo de menos de 12 horas. Los satélites completan
dos revoluciones orbitales en un día sideral, es decir cada satélite subirá 4 minutos
más temprano cada día, lo que indica que no tendrá la misma elevación cada día,
esta se incrementará. Todas las transmisiones satelitales son coherentemente
derivadas de la frecuencia fundamental (10.23MHz), para la frecuencia portadora
L1 (10.23X 154= 1575.42 MHz), frecuencia portadora L2 (10.23X 120= 1227.60
MHz), para los códigos P (Y) y C/A es 10.23 MHz y 1.023 MHz respectivamente. El
mensaje de navegación es modulado para L1 Y L2 a 50 bps. Este contiene
información de las efemérides de los satélites, tiempo GPS, comportamiento del
reloj y estado del sistema. El tiempo GPS no coincide con el tiempo UTC, este solo
coincidió el 5 y 6 de junio de 1980, debido a los efectos de relatividad, por la
velocidad que lleva el satélite, el reloj aparenta adelantarse 38.3 µs por día, esto es
igual a ∆F=0.0045674. Debido a esto se corrige la frecuencia fundamental menos
un offset ∆F/F=-4.4647E-10 quedando la frecuencia fundamental como
10.22999999543 MHz. El otro error relativista depende proporcionalmente de la
excentricidad de la órbita, como hay una excentricidad de 0.02 se introduce 45 ns,
error estimado en 14m de Pseudodistancia, si fuese circular no habría ningún error.
La precisión del código P (Y) es el principal código utilizado para la navegación
militar. (Leick, 2004).
2.3.2. Glonass-Gnss.
Sistema global de navegación Sputnik Kovaya de Rusia, empieza a desarrollarse
en 1982 cuando se lanza el primer satélite navegación, así como GPS, GLONASS
fue planeado para contener 24 satélites, contiene tres planos orbitales separados
por 120° y con una inclinación de 64.8°. Las orbitas son circulares con un radio de
25500km, obteniéndose un periodo orbital de 11 horas y 15 minutos. La mayor

CAPITULO 2. FUNDAMENTO TEÓRICO.
27
diferencia entre GLONASS Y GPS es que cada satélite GLONASS transmite su
propia frecuencia portadora. Así:
F1=1602+0.5625* P
F2=1246+0.4375* P
Donde P es el número del canal utilizado por el satélite para transmitir la señal. La
señal original usa los canales 1-24 cubriendo la frecuencia L1 de 1602.5625 a
1615.5 MHz, existe problemas en presencia de terminales móviles que operan de
1610 a 1621MHz, se recomienda utilizar canales de -7-13. La frecuencia
fundamental es 5 MHz y es ajustada a 4.99999999782 por efectos relativistas. El
mensaje de navegación contiene la posición de los satélites, velocidades del SV y
aceleraciones debido a la atracción luna-sol. (Romero, 2012.).
2.3.3. Galileo.
En marzo 26 de 2002, el consejo Europeo acordó lanzar el programa de navegación
satelital civil llamado Galileo, para adquirir algunos servicios de este sistema, los
usuarios deben hacer un pequeño aporte. Se espera una constelación de 30
satélites, distribuidos en tres planos orbitales. Las orbitas nominales se esperan
sean circulares, con un semieje mayor cercano a GPS y GLONASS, contendrá dos
señales E5A que compartirá con la señal de GPS L5 de 1176,45 MHz y E5B con un
tentativo de 1202.025 MHz. (Leick, 2004).
2.4. Fundamentos del NTRIP.
De las diferentes modalidades de observación GPS, la técnica diferencial o relativa
es la que ofrece hasta el momento los mejores resultados. En esta intervienen dos
o más estaciones observando de forma simultánea hacia los mismos satélites y
donde al menos una de ellas presenta coordenadas conocidas y de alta precisión,
denominada estación base. (Zulia., 2009.).
Cuando se incorporan algunos conceptos de las telecomunicaciones a la teoría y
práctica del GPS, surgen las denominadas observaciones en tiempo real. Estas
consisten en la emisión de correcciones diferenciales, generadas por una estación
base, hacia las diferentes estaciones desconocidas que se estén levantando,

CAPITULO 2. FUNDAMENTO TEÓRICO.
28
obteniendo coordenadas confiables en el mismo instante de la medición. Este tipo
de mediciones requiere de instrumentación especial y en algunos casos resultan
complejas y sensibles ante las condiciones del entorno, no obstante, sus resultados
son de muy buena calidad y suficientes para satisfacer los requerimientos de
exactitud y precisión de levantamientos topográficos y geodésicos comunes;
destacan por ejemplo las mediciones RTK y las DGPS en tiempo real. (Zulia.,
2009.).
Las innovaciones experimentadas por las observaciones GPS en tiempo real se han
manifestado principalmente en la forma de transmitir las correcciones diferenciales
y naturalmente en el desarrollo de algoritmos matemáticos aplicados a las
mediciones y al tratamiento de las fuentes de error. De esta manera, las
correcciones diferenciales pueden ser transmitidas por vía radio modem conectado
directamente a los receptores, vía satélite, por telefonía celular o también vía
Internet.
Las casas fabricantes han diseñado y puesto en el mercado instrumentos
receptores capaces de ejecutar las observaciones en tiempo real en función de
estas innovaciones. Por otra parte, grandes empresas especializadas, tanto de los
sectores públicos como privados, nacionales o internacionales, han ofrecido a la
comunidad de usuarios del GPS, servicios asociados con la emisión y aplicación de
correcciones diferenciales, optimizando así las tareas de posicionamiento y la
obtención de resultados asociados.
Los recientes avances en la ciencia y la tecnología beneficiaron sin duda alguna al
surgimiento de estos cambios positivos en la metodología observacional. Hoy día,
la comunicación a través de las redes, proporciona a la comunidad involucrada con
las geociencias, una novedosa herramienta para la determinación de posiciones
tridimensionales conocida como NTRIP. (Zulia., 2009.).
El NTRIP fue desarrollado en Alemania de manera conjunta por la Agencia Federal
de Cartografía y Geodesia (Bundesamt für Kartographie und Geodäsie, BKG) y la
Universidad de Dortmund, y consiste en la transmisión de correcciones diferenciales
GNSS, originalmente en formato estándar RTCM, a través del protocolo de
transferencia de hipertexto (HTTP), las cuales son calculadas desde una estación
de referencia y ofrecidas a los usuarios vía Internet. (Alvarez I. , 2011)
El sistema está compuesto por tres elementos básicos: NTRIP Source, es la fuente
generadora de las correcciones diferenciales en formato RTCM, materializada por
un receptor GNSS capaz de llevar a cabo este proceso y de enviarlas a un servidor,
este último además de recibir las correcciones, también permite transferirlos vía

CAPITULO 2. FUNDAMENTO TEÓRICO.
29
HTTP al siguiente componente del sistema. El servidor NTRIP no es más que un
computador con acceso a Internet y un software adecuado para cumplir dichas
funciones. NTRIP Caster, es el agente transmisor, su función principal es la de
difundir las correcciones GNSS calculadas a la comunidad de usuarios, la cual
constituye al NTRIP Client, este segmento es el receptor final de las correcciones
diferenciales quien las aplica para la obtención de un posicionamiento preciso en
tiempo real. (Zulia., 2009.).
La Ilustración 3, describe los componentes del NTRIP. La diferencia más relevante
con respecto a los sistemas tradicionales de medición GNSS en tiempo real, radica
justamente en la transmisión de las correcciones a través de la Internet y que estas
pueden ser capturadas desde cualquier dispositivo que disponga de conexión a la
red: PC, PDA, teléfono móvil (GSM o CDMA), entre otros.
Ilustración 3. Arquitectura del N-TRIP.
Fuente: (Zulia., 2009.).
2.4.1. Operatividad en Campo.
Las principales casas comerciales de instrumentos receptores GNSS ofrecen
actualmente productos capaces de soportar el NTRIP a nivel de hardware y
software. Esto, junto a la masificación del uso de la Internet, generalmente en las
zonas urbanas, crea las condiciones básicas para la ejecución de mediciones GNSS
asistidas por este protocolo de datos.
En consecuencia, son estos los elementos básicos para la ejecución de mediciones
GNSS bajo el esquema del NTRIP: un instrumento receptor que ofrezca esta
alternativa y acceso a la Internet en el mismo sitio de la observación. La medición

CAPITULO 2. FUNDAMENTO TEÓRICO.
30
en tiempo real puede ser tanto de los códigos como de las portadoras en el caso
del GPS. Cabe destacar que, en este tipo de mediciones en tiempo real, a pesar de
su carácter relativo, solo se necesita disponer de un instrumento capaz de realizar
medición RTK y de permitir una conexión inalámbrica a Internet, logrando la
obtención de resultados de calidad similar a otras modalidades afines como el RTK
convencional. Esto resulta beneficioso para aquel usuario que no pueda contar con
un mínimo de dos receptores para llevar a cabo el trabajo de campo en modo
diferencial. (Zulia., 2009.).
Por otra parte, el usuario debe en primer lugar, poder acceder a las correcciones
diferenciales pues no basta con disponer del instrumental. Todo usuario interesado
puede registrarse debidamente en la base de datos del International GNSS Service
(IGS).
La recepción de la señal de corrección diferencial vía NTRIP, es canalizada a través
de una aplicación informática asociada al hardware comercial o en su defecto
gratuita, como por ejemplo GNSS Internet Radio que debe ser instalada
previamente en el dispositivo que permita la conexión a Internet (PC, laptop, PDA o
teléfono celular). El software define el entorno del usuario NTRIP al permitir la
comunicación y transferencia de los datos GNSS a un IP establecido propio del IGS.
Los transmisores NTRIP del IGS están protegidos, siendo esta la razón por la cual
todo usuario debe estar registrado.
2.4.2. Validación de Resultados.
En el año 2007, la empresa Mediciones Científicas e Industriales C.A. (MECINCA),
realizó las primeras mediciones GPS con auxilio de correcciones NTRIP. Estas
pruebas consistieron en la ocupación de diversos puntos ubicados dentro de un
radio de aproximadamente 40Km con respecto a una estación base. Se emplearon
instrumentos receptores de una y doble frecuencia para este ensayo. Las
correcciones recibidas fueron generadas por la referida estación base (fuente local)
y retransmitidas desde el Caster del IGS. Para ello, se utilizó un dispositivo de
telefonía celular con el fin de establecer la conexión a Internet.
Los resultados obtenidos fueron contrastados con aquellos provenientes del
posicionamiento estático diferencial postprocesado que se realizó para cada
estación ocupada, y adicionalmente con posiciones obtenidas mediante
observaciones RTK convencionales. Tal y como era de esperarse, se apreció una

CAPITULO 2. FUNDAMENTO TEÓRICO.
31
correlación entre la longitud de las líneas bases y las exactitudes de las
coordenadas, de manera que mientras mayor fue la distancia de separación base-
rover, menor fue la exactitud. No obstante, las diferencias medias entre los modos
de posicionamiento ensayados oscilaron en el orden de los ±0,003m y ±0,020m para
separaciones de 1 y 30 Km respectivamente. (Zulia., 2009.).
En tal sentido, se planificó y ejecutó un conjunto de observaciones satelitales GPS
tanto postprocesadas como en tiempo real NTRIP, en diversos sitios, utilizando
receptores Thales Z-Max (de dos frecuencias) y Magellan Promark 3 (de una
frecuencia), además de la estación permanente Sokkia GRS2700. Para establecer
la conexión a Internet se dispuso de un teléfono celular con tecnología CDMA, el
cual sirvió como modem; a través de una laptop y una controladora manual, se
definió el enlace con los receptores GPS. En la ilustración 4 se describen las
configuraciones instrumentales para cada receptor utilizado.

CAPITULO 2. FUNDAMENTO TEÓRICO.
32
Ilu
stra
ció
n 4
. C
on
fig
ura
ció
n I
nst
rum
enta
l
Fu
ente
: (Z
uli
a.,
200
9.)
.
CAPITULO 2. FUNDAMENTO TEÓRICO.
33
2.5. Redes de Estaciones Permanentes GPS.
En los últimos 20 años las técnicas geodésicas han evolucionado a un ritmo
impredecible. En particular el GPS, por ser entre las técnicas modernas una de las
más económicas, de infraestructura más sencilla y por consiguiente de aplicación
masiva, ha superado todas las expectativas. Son usuarios de la misma, geodestas
dedicados a la materialización del sistema de referencia, ingenieros y topógrafos
encargados de llevar adelante obras civiles, viales, emprendimientos mineros,
petroleros, la empresa aeronáutica para definir rutas aéreas y aterrizajes asistidos
por coordenadas, deportistas en navegación aérea, marítima y terrestre, etc. Es
quizás por la gran demanda en el soporte técnico y científico de esta gran gama de
usuarios que la estructura científica que respalda dicha técnica se ha visto obligada
a realizar grandes inversiones en el marco de referencia que la misma demanda.
En los orígenes del GPS el marco de referencia lo constituían las 5 estaciones de
rastreo permanente que pertenecen a los dueños del sistema. La comunidad
científica motivada principalmente por estudios geodinámicos, comenzó a instalar y
mantener otras Estaciones Permanentes GPS (EP GPS) distribuidas globalmente
cuya información pasó a ser pública a través del Internacional GPS Service, IGS.
Con este ejemplo de cooperación se comenzaron a instalar redes regionales que
perseguían, en algunos casos, fines científicos, pero en otros sólo el objeto de
brindar servicios a la comunidad de usuarios. A la fecha el IGS ha incorporado 385
Estaciones Permanentes GPS. Además, existe una gran cantidad de EP GPS que
no han sido incorporadas al IGS pero cuyas observaciones tienen calidad geodésica
como por ejemplo EP instaladas con fines catastrales o Bases de Sistemas GPS de
RTK, etc. Esta infraestructura es cada vez más utilizada en la materialización de
sistemas de referencia terrestres, por las ventajas que representa por sobre las
formas convencionales de materializar redes de puntos fijos (marcos pasivos).
(Oberti., 2005.).
2.5.1. Evolución del Marco de Referencia en América.
La materialización tradicional se ha conservado en muchas de las realizaciones de
los marcos de referencia modernos como:
SIRGAS, POSGAR, etc. La diferencia con las redes clásicas se diferencia en que
las mismas han sido medidas con GPS, por lo tanto, materializan sistemas

CAPITULO 2. FUNDAMENTO TEÓRICO.
34
geocéntricos. (Hoyer, Avances en la Materialización del Marco de Referencia
SIRGAS en Tiempo Real mediante NTRIP., 2010.).
2.5.2. Proyecto SIRGAS.
El proyecto SIRGAS (Sistema de Referencia Geocéntrico para las Américas). Fue
iniciado en la Conferencia Internacional para la definición de un Dátum Sud.
American Geocéntrico, realizada desde el 4 al 7 de Octubre de 1993 en Asunción,
Paraguay. (Oberti., 2005.)
Los objetivos establecidos para el proyecto fueron los siguientes:
• Definir un sistema de referencia para América del Sur.
• Establecer y mantener una red de referencia.
• Definir y establecer un Dátum Geocéntrico.
Las actividades del proyecto SIRGAS se abocaron a desarrollar una red de
referencia continental con una precisión y exactitud compatibles con las técnicas de
posicionamiento modernas, principalmente aquellas asociadas con GPS.
Considerando el aumento en la utilización del GPS, se decidió que sería ínfimo el
malgaste de recursos para vincular las nuevas mediciones a la estructura geodésica
existente, la cual se basa en métodos de medición clásicos (triangulación,
poligonación, trilateración, etc.) y en los cuales la precisión es por lo menos 10 veces
peor que la obtenida fácilmente con GPS. Además, la coexistencia de una gran
cantidad de sistemas geodésicos clásicos definidos por los países Sud. Americanos
generaría problemas como por ejemplo en la definición de límites internacionales.
La adopción del ITRF (Internacional Terrestrial Reference Frame) como sistema de
referencia común garantizó la homogeneidad de los resultados dentro del
continente y permitió la consistente integración de la red SIRGAS con las redes de
otros continentes, lo cual contribuye al desarrollo de la geodesia global. (Oberti.,
2005.).
2.6. Red de Estaciones Permanentes para Colombia.
El proceso de introducción de la tecnología GPS en Colombia con propósitos de
investigación científica en el ámbito de la geodinámica ha sido liderado por el
Instituto Colombiano de Geología y Minería – INGEOMINAS.

CAPITULO 2. FUNDAMENTO TEÓRICO.
35
El Proyecto CASA (Central And South América GPS Project), el cual fue
patrocinado por NASA, NSF (National Science Foundation), e instituciones
individuales de los países participantes, inició en el campo en enero de 1988.
Científicos de más de 25 organizaciones en 13 países diferentes y territorios
cooperaron en lo que fue en ese entonces, la más grande campaña de GPS en el
mundo, empleando 43 receptores para obtener datos de 590 estaciones-día en
cuatro continentes. Este conjunto de datos incluyó información de 37 estaciones
dentro del área de estudio que abarcó los países de Colombia, Ecuador y Venezuela
en Suramérica, Costa Rica y Panamá en América Central. Durante 10 años, más
de 600 sitios individuales fueron eventualmente establecidos y ocupados usando
GPS dentro de la red CASS para obtener los siguientes objetivos científicos
específicos:
2.6.1. Pregeored.
En 1998, bajo el marco del proyecto institucional “Levantamiento de Información
Geodinámica del territorio colombiano”, se inició un trabajo sistemático como
prolongación del proyecto CASA, correspondiente a la densificación de una red
pasiva, preámbulo de lo que hoy se conoce como GEORED (Geodesia: Red de
Estudios de Deformación), la cual se concibió de manera amplia, con cobertura
incluso en las zonas volcánicas.
El propósito fundamental de esta actividad fue medir el campo de esfuerzos
corticales en Colombia, utilizando técnicas espaciales geodésicas GPS.
El 25 de enero de 1999 ocurrió el sismo del Quindío, con profundas implicaciones a
nivel nacional y regional. Gracias al apoyo del IGAC que facilitó los equipos
necesarios, esta fue la primera oportunidad para potencialmente obtener
mediciones de desplazamiento cosísmico en Colombia. Esto requería una campaña
cooperativa entre los ingenieros del IGAC y de INGEOMINAS con el propósito de la
reocupación de los sitios localizados cerca del área epicentral del sismo,
previamente ocupados en 1998. (Mora H, 2009.).
En este mismo año, el INGEOMINAS adquiere el primer receptor GPS,
correspondiente a un receptor Trimble 4000 SSI con antena Trimble Dorne-Margolin
(DM) choke-ring.
Durante los años 2001 al 2006 se realizaron campañas menores de campo,
empleando además del receptor Trimble del INGEOMINAS, dos receptores GPS
igualmente marca Trimble 4000 SSI con antenas dm choke-ring, facilitados por el

CAPITULO 2. FUNDAMENTO TEÓRICO.
36
Laboratorio Andino de Geofísica del Departamento de Ciencias de la Tierra y del
Océano de la Universidad de Carolina del Sur, Estados Unidos. Es importante
destacar dos campañas. La primera corresponde a la campaña GPS del 2003, que
permitió la ocupación de un buen número de estaciones bajo el marco del proyecto
“Microzonificación Sísmica de la ciudad de Santiago de Cali”, en colaboración con
el Departamento Administrativo de Gestión Ambiental-DAGMA, y la segunda
campaña, a finales del 2004, con el interés de observar el desplazamiento cosísmico
asociado al sismo de Pizarro del 15 de Noviembre del 2004.
2.6.2. Igeored.
En el año 2006, el Instituto Colombiano de Geología y Minería - INGEOMINAS
presentó a consideración del Gobierno Central, el proyecto “Implementación de la
Red Nacional de Estaciones Geodésicas Satelitales GPS con propósitos
geodinámicos”, conocida como GEORED basada en el concepto de “Geodesia
Tectónica y Volcánica: Red de Estudios de Deformación”, como la manera
apropiada de incrementar el grado de conocimiento de la geodinámica en la esquina
noroccidental de Suramérica (Mora, 2006), orientada a reducir las amenazas
asociadas mediante adecuada toma de decisiones, basada en la integración y
análisis de datos GPS y datos obtenidos por otro tipo de redes instrumentales. Este
proyecto, debidamente aprobado, inició sus actividades en Enero del año 2007,
donde se ha convertido en una herramienta esencial para el estudio de la
deformación de la corteza terrestre. Es vital en el análisis de deformación interplaca
e intraplaca y del ciclo sísmico actual. (Mora H, 2009.).
Desde Enero 1º de 2007, fecha oficial de inicio del proyecto, un plan de acción se
ha iniciado y es continuo de manera precisa y ordenada. El estado de avance, así
como los resultados obtenidos pueden ser observados en las diferentes páginas del
portal del proyecto GEORED. Un importante evento que debe ser reconocido es el
día Febrero 24 de 2008, cuando personal del proyecto GEORED del INGEOMINAS
instaló la primera estación permanente GPS con propósitos geodinámicos en el
“Aeropuerto Internacional Camilo Daza” en la ciudad de Cúcuta, bajo convenio de
cooperación entre INGEOMINAS y la Aeronáutica Civil de Colombia. Por tal motivo,
se ha establecido el día 24 de Febrero como el día GEORED. (H., Servicio
Geológico Colombiano., 2008.).

CAPITULO 3. DESCRIPCIÓN DE LA METODOLOGÍA.
37
CAPITULO 3.
3. DESCRIPCIÓN DE LA METODOLOGÍA.
En este capítulo se presenta una descripción en la ejecución de la metodología, la
obtención de datos, el software utilizado y las técnicas aplicadas durante el
desarrollo del proyecto.
El aporte al Ingeniero Topográfico se basa en la fundamentación y aplicación de la
técnica NTRIP como una nueva metodología, para hacer más eficiente su labor y
está enfocado principalmente en aportar y contribuir en la veracidad de la
información que entrega el profesional de la topografía como insumo en la cadena
de trámites del proceso urbanístico de la ciudad, enfocado en el perfil del Ingeniero
Topográfico y desde el ámbito de ciudad ayudará al desarrollo de la misma.
Está metodología se describen a continuación en tres fases:
Fase 1 – Identificación de Levantamiento Topográfico sujeto de Verificación.
Fase 2 – Trabajo de Campo.
Fase 3 – Post-Proceso de Información.
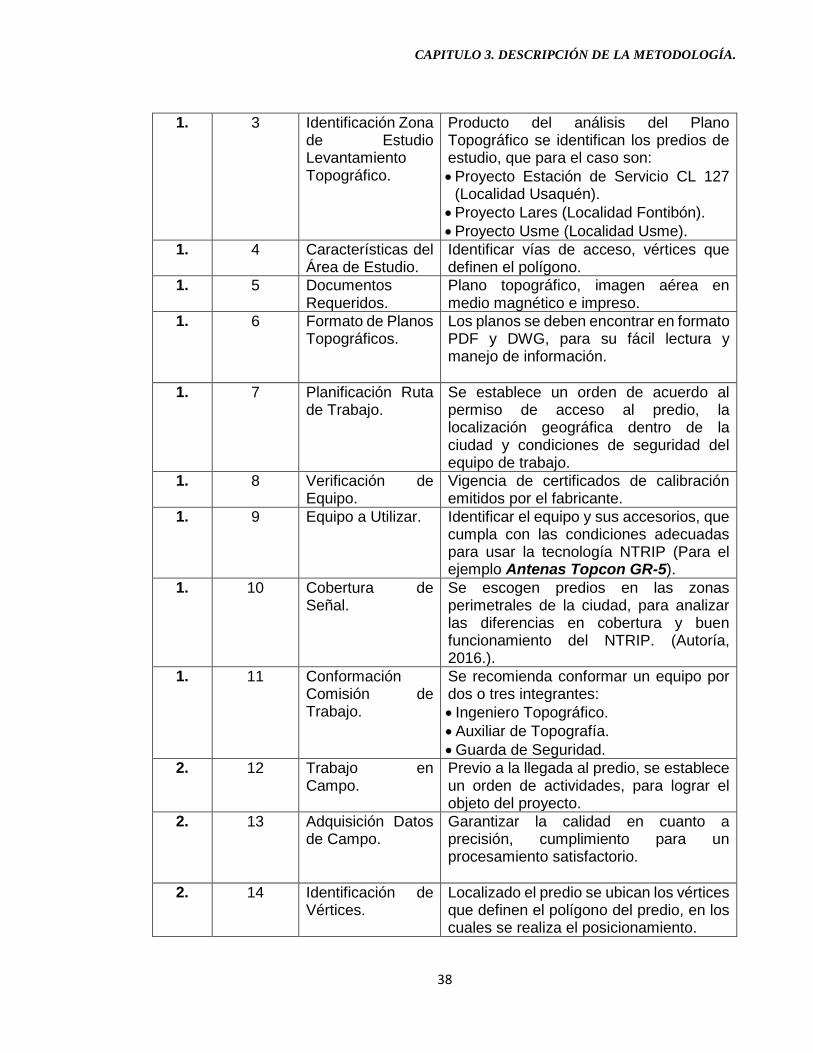
3.1. Inventario de la Metodología.
FASE. NÚMERO. ACTIVIDAD. DESCRIPCIÓN.
1. 1 Estudio de Planos Topográficos.
Se realiza un análisis de los Planos Topográficos incorporados en donde se identifican diferencias con respecto a la cartografía base del Distrito. (Autoría, 2016.).
1. 2 Requisitos de Plano Topográfico.
Los requisitos exigidos para la incorporación topográfica están dados en la Resolución de Trámites 813 de 2013. (Norma UAECD: Resolucion Num. 813, 2010).
CAPITULO 3. DESCRIPCIÓN DE LA METODOLOGÍA.
38
1. 3
Identificación Zona de Estudio Levantamiento Topográfico.
Producto del análisis del Plano Topográfico se identifican los predios de estudio, que para el caso son:
Proyecto Estación de Servicio CL 127 (Localidad Usaquén).
Proyecto Lares (Localidad Fontibón).
Proyecto Usme (Localidad Usme).
1. 4 Características del Área de Estudio.
Identificar vías de acceso, vértices que definen el polígono.
1.
5 Documentos Requeridos.
Plano topográfico, imagen aérea en medio magnético e impreso.
1. 6 Formato de Planos Topográficos.
Los planos se deben encontrar en formato PDF y DWG, para su fácil lectura y manejo de información.
1. 7 Planificación Ruta de Trabajo.
Se establece un orden de acuerdo al permiso de acceso al predio, la localización geográfica dentro de la ciudad y condiciones de seguridad del equipo de trabajo.
1. 8 Verificación de Equipo.
Vigencia de certificados de calibración emitidos por el fabricante.
1. 9 Equipo a Utilizar. Identificar el equipo y sus accesorios, que cumpla con las condiciones adecuadas para usar la tecnología NTRIP (Para el ejemplo Antenas Topcon GR-5).
1. 10 Cobertura de Señal.
Se escogen predios en las zonas perimetrales de la ciudad, para analizar las diferencias en cobertura y buen funcionamiento del NTRIP. (Autoría, 2016.).
1.
11 Conformación Comisión de Trabajo.
Se recomienda conformar un equipo por dos o tres integrantes:
Ingeniero Topográfico.
Auxiliar de Topografía.
Guarda de Seguridad.
2. 12 Trabajo en Campo.
Previo a la llegada al predio, se establece un orden de actividades, para lograr el objeto del proyecto.
2. 13 Adquisición Datos de Campo.
Garantizar la calidad en cuanto a precisión, cumplimiento para un procesamiento satisfactorio.
2. 14 Identificación de Vértices.
Localizado el predio se ubican los vértices que definen el polígono del predio, en los cuales se realiza el posicionamiento.

CAPITULO 3. DESCRIPCIÓN DE LA METODOLOGÍA.
39
2. 15 Configuración del Equipo.
Se ingresa al software de trabajo Magnet Field (Topcon GR-5).
Configuración de conexión WI-FI.
Crear nuevo trabajo (método ESTÁTICO, CINEMÁTICO, NTRIP).
Establecer tipo de receptor, máscara de elevación y alturas.
Configuración señal de radio, receptor Rover y Base.
Configuración registro de puntos (HRMS, VRMS, precisión, tiempo de captura).
Enlace antena CORS (Usuario-Contraseña). (Autoría, 2016.).
2. 16 Captura de Información de los Vértices.
Para iniciar la captura tenga presente estos pasos:
Encendido antena GR-5.
Instalación en trípode o bastón.
Nivelación de equipo con nivel esférico y de búrbuja.
Eliminar posibles obstrucciones de la señal al Rover (Paredes, Antenas Repetidoras, Árboles y demás elementos).
Conexión entre antena y colector (vía bluetooth).
Conexión entre móvil (Celular o Tablet) y receptor.
Iniciar medición continua hasta lograr la mejor recepción de señal para captura de coordenadas.
Almacenamiento de coordenadas en el archivo de origen.
2
17
Pre-análisis información.
Verificar la integridad de la información registrada por el operador y capturada con el colector.
2. 18 Descargue Información.
Por último, se descarga los puntos almacenados, para ello se procede a:
Definir la extensión de descarga como DWG, SHP, CSV, TXT y el crudo .RW5.

CAPITULO 3. DESCRIPCIÓN DE LA METODOLOGÍA.
40
Almacenar en carpeta en el cual se desarrolló el levantamiento.
3. 19 Traslado Sistema de Referencia.
Descargar el archivo DWG en el software ARCGIS, estos puntos se llevan de Magna Colombia Bogotá (Marco de Referencia del levantamiento, varía dependiendo de la configuración del equipo) a Magna Ciudad Bogotá (Marco de Referencia para la Ciudad de Bogotá). (Autoría, 2016.).
3.
20 Análisis Velocidades y cambio de Época Placas IGAC.
Definir época de cálculo dependiendo del proyecto a desarrollar, que para el caso se estableció así: Posicionamiento en dos mojones del IGAC (CD-589-USME, BOGOTA9), para garantizar el buen funcionamiento del equipo y calidad de la información. Se trasforman las coordenadas geográficas a geocéntricas suministradas por el certificado IGAC. Posteriormente se calcula sus velocidades para cambio de época y se transformar al sistema local de referencia.
3. 21 Criterios de Precisión y Calidad.
De acuerdo a la zona del proyecto, se buscará que las soluciones arrojadas por el colector en lo posible sean fijas.
3. 22 Procesamiento de Datos Crudos.
Se generan tablas en Excel para el análisis de la información donde se organizan los datos así:
Tiempos de lectura (3-10-30 segundos).
Marcos de referencia.
Determinación diferencias del método convencional vs tecnología NTRIP.
3. 23 Tolerancias. El rango a definir estará dado por:
Cobertura de señal de internet.
Máscara de obstrucción mínima.
Distancia del Rover a la CORS. Tabla 1. Inventario de la Metodología.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
41
CAPITULO 4.
4. DESARROLLO DE LA METODOLOGÍA.
4.1. Fase 1- Identificación de Levantamiento Topográfico Sujeto a
Verificación.
Se estudiaron alternativas de Levantamientos Topográficos, que fueron objeto de
incorporación topográfica a la base cartográfica del Distrito.
Inicialmente se realizó un estudio de la base digital cartográfica de la Unidad
Administrativa Especial de Catastro Distrital, en donde se identificaron los predios
objeto de incorporación topográfica, sobre esta base, se realizó un diseño inicial del
trabajo, identificando los posibles predios incorporados topográficamente que
fueron objeto de verificación. (Autoría, 2016.).
Los predios sujetos a verificación mediante la metodología, cumplieron con las
condiciones adecuadas de área, determinadas en el predio cuyos vértices fueron
identificados en campo y de fácil acceso e identificación.
4.1.1. Definición de Polígono para Incorporación Topográfica:
De acuerdo a las características anteriores, se establecieron tres zonas de estudio
en las cuales se desarrolló la metodología.
Los predios representados en polígonos, producto del Levantamiento Topográfico
fueron seleccionados para desarrollar la metodología de verificación los cuales
cumplen con los requisitos exigidos por la Unidad Administrativa Especial de
Catastro Distrital.
Los requisitos exigidos para la incorporación topográfica están dados en la
Resolución de Trámites 813 de 2013. (Norma UAECD: Resolucion Num. 813, 2010).
El área de estudio se localizó en predios que realizaron el proceso de incorporación
de planos topográficos en la ciudad de Bogotá D.C., en el departamento de
Cundinamarca, distribuidos en el casco urbano de la ciudad, situados en las
localidades de Usaquén, Fontibón y Usme, ubicando vértices definidos por sus
construcciones o cerramientos, que permiten desarrollar el objeto del proyecto. Los

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
42
planos se presentan en formato PDF y DWG, en donde se describen las
coordenadas de los vértices que definen los polígonos de los predios.
4.1.2. Localización de Zonas para Desarrollar el Proyecto.
A continuación, se describen las zonas donde se desarrolló el proyecto:
Proyecto Lares.
Inicialmente se trabajó en la localidad de Fontibón barrio El Carmen, el día 10 de
Septiembre de 2016, en donde se está desarrollando un proyecto Urbanístico, el
cual reúne las características para realizar el proyecto. Ilustración 5-6.
Ilustración 5.Composición Plano Topográfico y Puntos Ntrip.
Fuente: Autoría Propia.
Ilustración 6. Plano de Incorporación Topográfica.
Fuente: Autoría Propia.
Proyecto Estación de Servicio CL 127.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
43
Posteriormente se trabajó en la localidad de Usaquén, barrio San Gabriel Norte, el
día 10 de Septiembre de 2016, en el cual se pretende obtener la licencia de
construcción para un futuro proyecto, a través del plano topográfico incorporado.
Ilustración 7-8.
Ilustración 7 Composición Plano Topográfico y Puntos Ntrip.
Fuente: Autoría Propia.
Ilustración 8. Plano de Incorporación Topográfica.
Fuente: Autoría Propia.
Proyecto La Laguna - Usme.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
44
Posteriormente se trabajó en la localidad de Usme, barrio Olarte, el día 11 de
Septiembre de 2016, el cual se encuentra en proceso de implantación de un Plan
Parcial de la Secretaría Distrital de Planeación. Ilustración 9-10.
Ilustración 9 Composición Plano Topográfico y Puntos Ntrip.
Fuente: Autoría Propia.
Ilustración 10. Plano de Incorporación Topográfica.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
45
4.2. Fase 2 – Trabajo de Campo.
4.2.1. Planificación del Trabajo de Campo.
Dentro del desarrollo del trabajo de campo, es de suma importancia la realización
de una planeación para lograr el objeto del proyecto.
Se inició la planeación, identificando el equipo adecuado para la aplicación de esta
metodología, que cumplió con las condiciones adecuadas de señal de radio y
precisión, que permitió obtener información confiable.
Identificado el equipo, se realizó la configuración adecuada, bajo las características
técnicas del equipo indicadas y parámetros definidos para este tipo de proyectos.
(Autoría, 2016.).
4.2.2. Verificación de Levantamiento Topográfico.
Identificado el predio que ha sido objeto de incorporación topográfica se identificaron
los vértices que definen el polígono objeto de estudio.
4.2.3. Aplicabilidad de la Tecnología NTRIP.
Inicialmente se tuvo en cuenta los parámetros indicados, para la configuración de la
estación CORS, basados en la toma de datos en tiempo simultáneos, con archivos
específicos, incluyendo la codificación de parámetros de acuerdo a los
requerimientos de la antena receptora y el móvil que transmite la señal vía internet.
Se emplearon instrumentos receptores GPS de doble frecuencia, referidos a una
estación base, retransmitiendo la señal a la antena externa, ubicada en el predio,
enlazada a un colector previamente configurado con la técnica NTRIP y un teléfono
celular que envía la señal vía Bluetooth, ver Ilustración 11.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
46
Ilustración 11. Arquitectura y Señal NTRIP.
Fuente: Autoría Propia.
4.2.4. Equipo Utilizado para el Desarrollo de la Metodología.
El equipo utilizado es un receptor de datos GNSS, Topcon GR-5, el cual combina
los sistemas de posicionamiento original GPS, GLONASS, GALILEO y todas las
señales de precisión del sistema en desarrollo chino, Compass, Quasi-Zenith de
Japón por satélite (QZSS), y el sistema de la India IRNSS (Catalogo GR-5,
especificaciones, Topcon Corporation 2011), ver Ilustración 12.
Número de Canales: 216 Canales Universales.
Seguimiento de señales: Tecnología G3 – GPS, GLONASS y GALILEO.
Tipo de Antena: Antena integrada Micro-Center-Fence, con plano a
tierra.
PRECISIÓN: RTK H: 10 mm + 1 ppm.
V: 15 mm + 1 ppm.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
47
Estático/ Estático Rápido: H: 3mm + 0.5ppm.
V: 5mm + 0.5ppm.
Comunicaciones.
Tipo de Radio Opcional Integrado: UHF TX/RX, o 915 MHz Spread Spectrum.
Salida de Radio Base: 0.01 - 1.0W, seleccionable por el usuario.
Comunicación Celular Integrada: GSM/GPRS o CDMA.
Comunicación Inalámbrica: Integrada Bluetooth 2.0 Compatible.
Datos y Memoria.
Memoria Interna: Tarjeta de Memoria Removible SD/SDHC.
Salida de Datos: RTK TPS, RTCM SC104, CMR, CMR++.
Salida ASCII: NMEA 0183 versión 2.x y 3.0.
Ilustración 12. Antena GPS GR-5.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
48
Equipo Auxiliar.
Para la realización del proyecto se utilizaron los siguientes instrumentos auxiliares:
Trípode marca Topcon.
Bastón de 3 mts marca South.
Flexómetro.
4.2.5. Configuración del Colector.
A continuación, se describe el proceso de configuración de un colector marca
Topcon Ref. GR-5 para iniciar la toma de datos por el método N-TRIP.
En la Ilustración 13 se observa la pantalla de inicio por el cual se ingresa al software
de trabajo, que en este caso será el MAGNET Field.
Ilustración 13. Pantalla Inicio GR-5.
Fuente: Autoría Propia.
Posteriormente se busca una conexión WI-FI, por el cual accederá a los datos
necesarios para iniciar un trabajo, ver Ilustración 14.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
49
Ilustración 14. Acceso red WI-FI.
Fuente: Autoría Propia.
En las Ilustraciones 15-16, se inicia la configuración del nuevo trabajo a desarrollar,
en el cual se define el método a emplear como ESTATICO, CINEMATICO o N-TRIP
que sea el caso de estudio. Allí mismo se define el tipo de receptor, la máscara de
elevación, alturas.
Ilustración 15. Nuevo Trabajo.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
50
Ilustración 16.Configuración Método N-TRIP.
Fuente: Autoría Propia.
En las Ilustraciones 17-18, se configura el equipo GPS GR-5 como Rover, la
antena Base sujeta a la señal de radio.
Ilustración 17. Configuración Rover- Base.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
51
Ilustración 18. Parámetros Radio.
Fuente: Autoría Propia.
Posteriormente se ajusta la forma de colectar, ya sea fijo o flotante, la precisión
(HRMS-VRMS) y el tiempo de captura, ver Ilustración 19.
Ilustración 19. Configuración Registro Puntos.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
52
Por otra parte, se garantiza el correcto enlace a la base (ANTENA GEOSYSTEM)
con el Rover (COLECTOR GR-5), por medio de un puerto y una contraseña
definidas por el contratista y el operador, ver Ilustración 20.
Ilustración 20. Conexión CORS.
Fuente: Autoría Propia.
4.2.6. Procedimiento en la Toma de Información en Campo.
Se recolectaron los datos establecidos mediante equipos que permiten establecer
señal de radio y de internet, en el tiempo adecuado para encontrar una óptima
precisión.
El principal criterio para la toma de información, es la suministrada por los usuarios,
a partir de diferentes predios en donde se desarrolló la incorporación topográfica.
(Autoría, 2016.).
Para lograr el objeto del proyecto, se dio inicio con la localización de los vértices
perfectamente identificables en terreno los cuales permiten definir el polígono de los
predios y posteriormente desarrollar el posicionamiento Geodésico mediante la
utilización del sistema GPS (Sistema de Posicionamiento Global), con receptores
satelitales marca TOPCON de referencia GR-5, ver Ilustración 21.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
53
Ilustración 21. Antenas Topcon Referencia GR-5.
Fuente: Autoría Propia.
Una vez ubicados los vértices o puntos a georreferenciar, se procedió a realizar el
armado del equipo de medición (GPS y bastón), posteriormente se configuró el
Colector de Datos, para trabajar con el sistema GNSS. Se ingresa al software
Magnet-Field, para la creación del proyecto. Se establece la conexión con el sistema
GNSS, donde se requiere conexión de datos para el enlace con la antena CORS,
vía Internet, ver Ilustración 22.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
54
Ilustración 22. Armado de equipo.
Fuente: Autoría Propia.
Una vez configurado el colector, se procedió a ubicar los vértices y nivelar la antena
receptora en cada uno de estos, para tomar las lecturas de los puntos, cumpliendo
parámetros de numero de satélites, coordenadas reales del punto en el sistema de
proyección, correcciones en horizontal y vertical, lo cual nos establece un status fijo,
indicado para realizar la toma de lecturas, garantizando la precisión requerida.
Ilustración 23.
Ilustración 23. Toma de puntos y conexión.
Fuente: Autoría Propia.
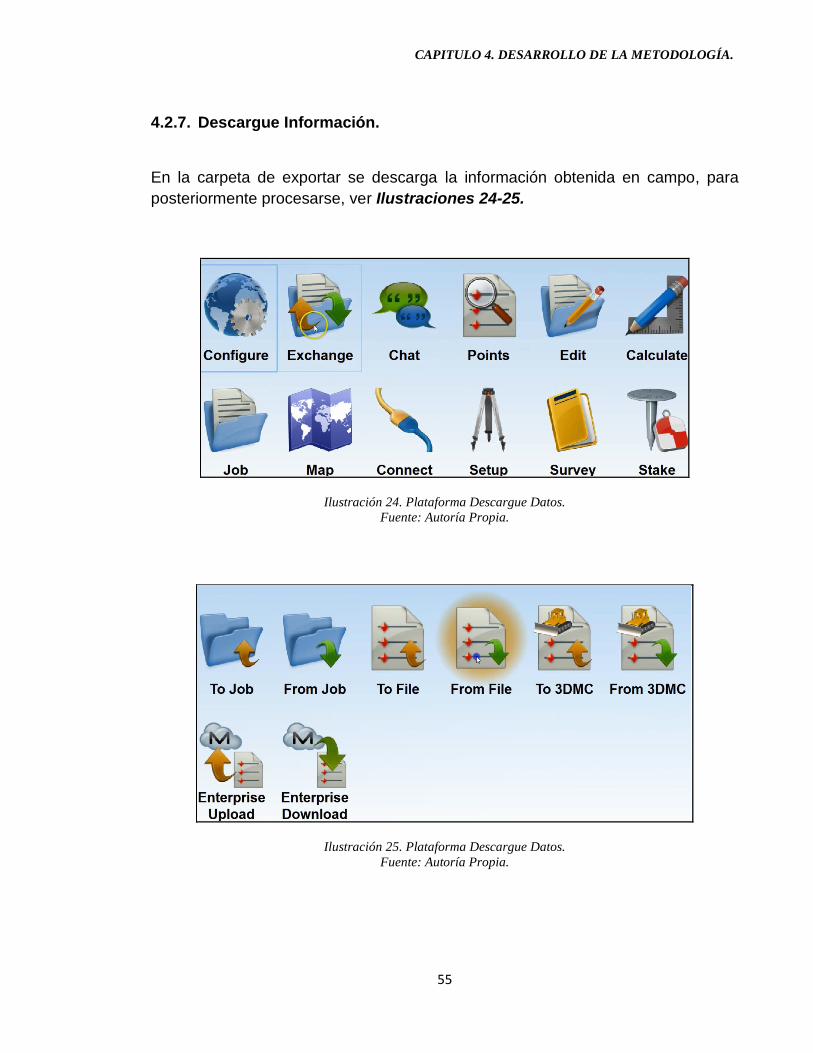
CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
55
4.2.7. Descargue Información.
En la carpeta de exportar se descarga la información obtenida en campo, para
posteriormente procesarse, ver Ilustraciones 24-25.
Ilustración 24. Plataforma Descargue Datos.
Fuente: Autoría Propia.
Ilustración 25. Plataforma Descargue Datos.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
56
Se define el tipo de datos que se quiere descargar, como líneas, puntos, áreas,
entre otros. El tipo de formato a exportar como DWG, SHP, CSV, TXT, y el formato
crudo como .RW5, ver Ilustración 26.
Ilustración 26. Formato de Descargue.
Fuente: Autoría Propia.
A continuación, se busca la carpeta con el cual se generó el trabajo desarrollado y
se exporta en los parámetros establecidos anteriormente, ver Ilustración 27.
Ilustración 27. Descargue Datos.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
57
4.3. Fase 3 – Post-proceso de Información.
4.3.1. Traslado Sistema de Referencia Levantamiento.
Posterior a la toma de información y descargue de datos del colector, se procede a
manipular la información en el software Arcgis, para la verificación de los respectivos
puntos con sus coordenadas.
Se cargan la información en formato DWG, ver Ilustración 28.
Ilustración 28. Cargue de Archivos DWG.
Fuente: Autoría Propia.
Se procede a cambiar el archivo DWG a formato shape, para manipular la
información dentro del ambiente de trabajo de los planos topográficos incorporados.
Los sistemas de referencia de estos están en, Magna_Colombia_Bogota, ver
Ilustración 29.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
58
Ilustración 29. Cambio de formato DWG a SHP.
Fuente: Autoría Propia.
Se procede con el proceso de transformación y proyección de coordenadas, el cual
se encuentra en el origen Magna_Colombia_Bogota y se transforma al origen
Magna_Ciudad_Bogotá, ver Ilustración 30.
Ilustración 30. Cambio de Origen.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
59
Por último, se cargan el levantamiento a comparar realizado por el método
convencional y con ello el posterior análisis del problema de investigación, ver
Ilustración 31.
Ilustración 31. Cargue de Archivos.
Fuente: Autoría Propia.
4.3.2. Modelo de Velocidades Empleado-Software Magna Sirgas 3.0.
Ilustración 32. Modelo Velocidades para las Américas.
Fuente: (Hermann Drewes, 2012).

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
60
Debido a la precisión del modelo de velocidades para las américas VEMOS 2009
(MAGNA SIRGAS 3 PRO): es de v ± 1 mm/a y vλ ± 2 mm/a, el error esperado en
el cambio por velocidad para la componente Norte, es de (20 años * 1mm) lo que
equivale a 2cm y para la componente Este, es de (20 años * 2mm) el equivalente
de 4cm, hay que aclarar que este modelo es netamente horizontal, pues Bogotá
presenta deformaciones locales, como se puede apreciar en la imagen anterior. De
hecho, al hacer la conversión aplicando vectores de velocidad, las alturas presentan
variaciones promedio de 7mm, a lo largo de 20 años, lo que no es coherente, pues
debería ser negativo, y valores de decímetros. (Autoría, 2016.).
De acuerdo al criterio mencionado, se analiza la información levantada en placas
IGAC (BOGOTÁ 9/ CD-USME-589) para tener una veracidad y confiabilidad del
método empleado.
Se toman las coordenadas geográficas suministradas por el certificado del IGAC,
allí se transforman a geocéntricas, ver Ilustraciones 33-34.
Ilustración 33. Transformación Coordenadas geográficas a geocéntricas CD-589-USME.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
61
Ilustración 34.Transformación coordenadas geográficas a geocéntricas época 1995.4 Bogotá-9.
Fuente: Autoría Propia.
Posteriormente se calcula sus correspondientes velocidades para el cambio de
época, que para el caso es de 1995.4 a 2016.695, ver Ilustraciones 35-36.
Ilustración 35. Cálculo velocidades de las coordenadas geocéntricas cd-usme-589.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
62
Ilustración 36. Cálculo velocidades de las coordenadas geocéntricas Bogotá-9.
Fuente: Autoría Propia.
A continuación, se calcula las velocidades de las coordenadas y se llevan a la época
del levantamiento. Se procede a transformarlas al sistema local (Bogotá), ver
Ilustraciones 37-38.
Ilustración 37. Transformación geocéntricas-planas locales cd-usme-589 época 2016.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
63
Ilustración 38. Transformación geocéntricas-planas locales cd-usme-589 época 2016.
Fuente: Autoría Propia.
A continuación, se realiza el cálculo de la ondulación, no obstante, es un dato
opcional como se explicó anteriormente ya que el sistema de trabajo por medio del
software, es únicamente planimétrico, ver Ilustraciones 39-40.
Ilustración 39. Cálculo ondulación geoidal cd-usme-589.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
64
Ilustración 40. Cálculo ondulación geoidal Bogotá-9.
Fuente: Autoría Propia.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
65
4.3.3. Resultados procesamiento cambio época en Placas IGAC.
A continuación, se presentan los resultados obtenidos en las placas CD-589-
USME y BOGOTÁ 9, con sus respectivas diferencias, ver Tablas 2-3.
Tabla 2. Traslado Época Placas Igac.
Fuente: Autoría Propia.
PUNTO Latitud Longitud Altura Elips.
CD-USME-589 4° 28' 2.75167" N 74° 07' 27.69071" W 2865.815
BOGOTA-9 4° 40' 45.07036" N 74° 07' 7.05360" W 2577.084
PUNTO X Y Z
CD-USME-589 1740257.400 -6119093.377 493715.818
BOGOTA-9 1740279.718 -6116845.822 517044.427
EPOCA DE ORIGEN EPOCA LEVANTAMIENTO
1995.4 2016.695
EPOCA VELOCIDADES
∆X 21.3 0.0004
∆Y 21.3 0.001
∆Z 21.3 0.013
EPOCA VELOCIDADES
∆X 21.3 0.001
∆Y 21.3 0.001
∆Z 21.3 0.013
PUNTO X Y Z
CD-USME-589 1740257.408 -6119093.356 493716.095
BOGOTA-9 1740279.739 -6116845.801 517044.704
PUNTO N E Z
CD-USME-589 85753.612 94803.391 2865.819
BOGOTA-9 109177.501 95438.962 2577.092
COORDENADAS PROYECTADAS LOCALES DE BOGOTA EPOCA 2016 PLACAS
CALCULO DE VELOCIDADES-EPOCA-DESPLAZAMIENTOS BOGOTA-9
CALCULO DE VELOCIDADES-EPOCA-DESPLAZAMIENTOS CD-USME-589
COORDENADAS GEOGRAFICAS GEOCENTRICAS EPOCA 1995.4 PLACAS
COORDENADAS CARTESINAS GEOCENTRICAS EPOCA 1995.4 PLACAS
COORDENADAS CARTESIANAS GEOCENTRICAS EPOCA 2016 PLACAS

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
66
Tabla 3. Diferencias Finales Placas Igac.
Fuente: Autoría Propia.
4.3.4. Procesamiento Datos Crudos.
A partir de los datos crudos de los levantamientos en los diferentes predios en la
ciudad de Bogotá, se generaron tablas en Excel para el análisis de la información,
en donde se describen la totalidad de datos tomados por las antenas receptoras.
Se encuentran el número de puntos tomados, su descripción, el error medio
cuadrático horizontal y vertical, latitud y longitud, el status, número de satélites,
Pdop, distancia de la antena a la base y máscara de obstrucción de cada punto, ver
Tabla 4.
PUNTO N E
CD-USME-589 85753.612 94803.391
BOGOTA-9 109177.501 95438.962
PUNTO N E
CD-USME-589 85753.263 94803.619
BOGOTA-9 109177.488 95438.952
PUNTO N E
CD-USME-589 0.349 0.228
BOGOTA-9 0.013 0.010
COORDENADAS PROYECTADAS LOCALES DE BOGOTA PLACAS.
COORDENADAS LOCALES DE BOGOTA PLACAS CERTIFICADO IGAC.
DIFERENCIAS COORDENADAS PROYECTADAS LOCALES DE BOGOTA.

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
67
Tabla 4. Datos crudos Levantamiento predio Usme.
Fuente Autoría Propia.
A partir de la descripción de datos en formato Excel, se procedió a organizarlos de
acuerdo al tiempo de lectura en campo, a los tres (3), diez (10) y treinta (30)
segundos, en origen Bogotá_Colombia_Bogotá y origen Magna Ciudad Bogotá, en
el predio de la localidad de Usme, para realizar un análisis e identificar diferencias
en las coordenadas obtenidas, ver Tablas 5-6.
Tabla 5. Datos organizados por tiempo de lectura origen Magna Colombia Bogotá.
Fuente Autoría Propia.
Tabla 6. Datos organizados por tiempo de lectura origen Magna Ciudad Bogotá.
Fuente Autoría Propia.
TIEMPOS
PTO NTE ESTE COTA PTO NTE ESTE COTA PTO NTE ESTE COTA
100 985762.295 994800.596 2869.996 102 985762.287 994800.594 2869.957 103 985762.283 994800.593 2869.939 CD589
101 985762.298 994800.607 2869.966 CD589
105 985788.808 994843.210 2864.662 104 985788.761 994843.187 2864.688 N21
106 985714.484 994770.869 2868.351 107 985714.470 994770.854 2868.344 108 985714.415 994770.869 2868.306 N19
111 985444.790 994518.901 2881.471 110 985444.726 994518.873 2881.564 109 985444.725 994518.866 2881.518 N13
112 985442.024 994520.819 2882.300 113 985442.047 994520.828 2882.349 114 985442.045 994520.835 2882.360 N12
117 985447.258 994528.022 2882.577 116 985447.234 994527.986 2882.483 115 985447.258 994528.035 2882.584 N11
118 985444.029 994532.087 2883.038 119 985444.002 994532.043 2882.962 120 985443.978 994532.014 2882.891 N10
123 985473.460 994569.169 2878.981 122 985473.453 994569.152 2879.034 121 985473.467 994569.177 2879.051 N9
124 985405.835 994620.482 2889.382 125 985405.841 994620.460 2889.375 126 985405.832 994620.479 2889.428 N8
128 985387.321 994596.062 2887.855 127 985387.322 994596.056 2887.848 N7
129 985332.623 994767.301 2903.723 130 985332.615 994767.304 2903.729 131 985332.605 994767.294 2903.718 N1
134 985526.634 994918.297 2881.894 133 985526.632 994918.299 2881.880 132 985526.642 994918.295 2881.888 N23
137 985500.313 994926.524 2882.929 136 985500.332 994926.591 2882.933 135 985500.327 994926.558 2882.908 N18
138 985298.808 994982.192 2906.040 139 985298.791 994982.218 2905.994 140 985298.796 994982.205 2906.018 N19
143 985143.544 995031.578 2931.516 142 985143.549 995031.582 2931.506 141 985143.555 995031.582 2931.517 N11
144 1009177.102 995437.925 2576.535 145 1009177.094 995437.925 2576.559 146 1009177.095 995437.925 2576.559 BTA 9
3 SEG 10 SEG 30 SEG
COORDENADAS N-TRIP GR-5 (MAGNA COLOMBIA BOGOTA)
LUGAR: USME
DESCRIPCION
TIEMPOS
PTO NTE ESTE COTA PTO NTE ESTE COTA PTO NTE ESTE COTA DESCRIPCION
100 85753.272 94803.621 2869.996 102 85753.263 94803.619 2869.957 103 85753.260 94803.617 2869.939 CD589
101 85753.275 94803.632 2869.966 CD589
105 85779.799 94846.249 2864.662 104 85779.752 94846.226 2864.688 N21
106 85705.438 94773.886 2868.351 107 85705.425 94773.871 2868.344 108 85705.369 94773.887 2868.306 N19
111 85435.613 94521.843 2881.471 110 85435.549 94521.815 2881.564 109 85435.548 94521.808 2881.518 N13
112 85432.846 94523.762 2882.300 113 85432.869 94523.771 2882.349 114 85432.867 94523.778 2882.360 N12
117 85438.083 94530.967 2882.577 116 85438.059 94530.931 2882.483 115 85438.083 94530.981 2882.584 N11
118 85434.853 94535.034 2883.038 119 85434.826 94534.990 2882.962 120 85434.802 94534.961 2882.891 N10
123 85464.299 94572.128 2878.981 122 85464.292 94572.111 2879.034 121 85464.306 94572.136 2879.051 N9
124 85396.652 94623.468 2889.382 125 85396.658 94623.446 2889.375 126 85396.649 94623.465 2889.428 N8
128 85378.129 94599.040 2887.855 127 85378.130 94599.034 2887.848 N7
129 85323.424 94770.353 2903.723 130 85323.417 94770.356 2903.729 131 85323.407 94770.346 2903.718 N1
134 85517.527 94921.391 2881.894 133 85517.525 94921.392 2881.880 132 85517.535 94921.389 2881.888 N23
137 85491.210 94929.657 2882.929 136 85491.216 94929.690 2882.933 135 85491.197 94929.623 2882.908 N18
138 85289.604 94985.346 2906.040 139 85289.599 94985.359 2905.994 140 85289.616 94985.333 2906.018 N19
143 85134.305 95034.757 2931.516 142 85134.299 95034.757 2931.506 141 85134.295 95034.753 2931.517 N11
144 109177.496 95438.952 2576.535 145 109177.488 95438.952 2576.559 146 109177.489 95438.952 2576.559 BTA 9
3 SEG 10 SEG 30 SEG
COORDENADAS N-TRIP GR-5 (MAGNA CIUDAD BOGOTA)
LUGAR: USME

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
68
Se realizó el mismo procedimiento para el análisis de la información en el
Levantamiento Topográfico del predio CL 127, en donde se describen la totalidad
de datos tomados por las antenas receptoras, ver Tabla 7-8-9.
Tabla 7. Datos crudos en Excel Levantamiento predio CL 127.
Fuente Autoría Propia.
Tabla 8. Datos organizados por tiempo de lectura origen Magna Colombia Bogotá.
Fuente Autoría Propia.
Tabla 9. Datos organizados por tiempo de lectura origen Magna Ciudad Bogotá.
Fuente Autoría Propia.
TIEMPOS
PTO NTE ESTE COTA PTO NTE ESTE COTA PTO NTE ESTE COTA
501 1011643.852 1005442.947 2595.144 502 1011643.859 1005442.947 2595.156 DL-A
503 1011644.885 1005449.217 2596.414 LINDERO
504 1011644.706 1005453.962 2597.383 LINDERO
505 1011655.124 1005453.560 2602.160 506 1011655.964 1005453.379 2598.337 LINDERO
507 1011696.834 1005455.978 2598.256 508 1011696.832 1005456.033 2598.270 LINDERO
509 1011696.834 1005461.624 2598.797 LINDERO
510 1011719.422 1005398.169 2594.743 511 1011719.422 1005398.176 2594.744 512 1011719.420 1005398.196 2594.711 DL-B
513 1011719.418 1005398.203 2594.705 514 1011719.412 1005398.189 2594.702 DL-B
DESCRIPCION3 SEG 30 SEG10 SEG
LUGAR: CLL 127
COORDENADAS N-TRIP GR-5 (MAGNA COLOMBIA BOGOTA)
TIEMPOS
PTO NTE ESTE COTA PTO NTE ESTE COTA PTO NTE ESTE COTA DESCRIPCION
501 111646.221 105447.739 2595.144 502 111646.229 105447.739 2595.156 DL-A
503 111647.255 105454.012 2596.414 LINDERO
504 111647.076 105458.759 2597.383 LINDERO
505 111657.499 105458.355 2602.160 506 111658.340 105458.174 2598.337 LINDERO
507 111699.226 105460.770 2598.256 508 111699.224 105460.825 2598.270 LINDERO
509 111699.227 105466.418 2598.797 LINDERO
510 111721.817 105402.935 2594.743 511 111721.817 105402.943 2594.744 512 111721.815 105402.962 2594.711 DL-B
513 111721.814 105402.970 2594.705 514 111721.807 105402.956 2594.702 DL-B
10 SEG 30 SEG
COORDENADAS N-TRIP GR-5 (MAGNA CIUDAD BOGOTA)
LUGAR: CLL 127
3 SEG

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
69
Por consiguiente, se analiza la información del Levantamiento Topográfico del
predio Lares, en donde se describen la totalidad de datos tomados por las antenas
receptoras, ver Tablas 10-11-12.
Tabla 10. Datos crudos en Excel Levantamiento predio Lares.
Fuente Autoría Propia.
Tablas con los datos organizados de acuerdo al tiempo de lectura en campo, a los
tres (3), diez (10) y treinta (30) segundos, en origen Bogotá Colombia Bogotá y
origen Magna Ciudad Bogotá, para analizar e identificar diferencias en la precisión
de las coordenadas obtenidas. Tablas 8 y 9.
Tabla 11. Datos organizados por tiempo de lectura origen Magna Colombia Bogotá.
Fuente Autoría Propia.
Tabla 12. Datos organizados por tiempo de lectura origen Magna Ciudad Bogotá.
Fuente Autoría Propia.
TIEMPOS
PTO NTE ESTE COTA PTO NTE ESTE COTA PTO NTE ESTE COTA
100 1008532.881 992182.674 2566.436 101 1008532.768 992182.604 2566.395 102 1008532.735 992182.648 2566.377 PAR/M14
103 1008505.538 992205.124 2566.465 104 1008505.509 992204.807 2566.302 105 1008505.782 992204.798 2566.242 PAR/M0
116 1008508.209 992133.579 2566.190 106 1008507.681 992134.078 2569.680 107 1008507.746 992133.495 2568.933 PAR/M6
108 1008510.246 992129.578 2571.302 109 1008510.295 992129.56 2570.656 PAR/M7
110 1008513.265 992157.441 2566.324 111 1008512.272 992157.603 2567.304 PAR/M13
112 1008524.024 992145.191 2570.031 PAR/M11
113 1008465.102 992152.078 2571.589 PAR/M2
114 1008499.197 992122.254 2570.079 115 1008499.74 992121.983 2569.395 PAR/M5
117 1008505.017 992202.210 2563.931 118 1008505.035 992202.183 2563.961 119 1008505.093 992202.459 2565.336 PAR/M0
120 1008461.948 992151.739 2569.144 121 1008461.996 992151.709 2569.104 122 1008461.95 992151.747 2569.079 PAR/M2
DESCRIPCION
COORDENADAS N-TRIP GR-5 (MAGNA COLOMBIA BOGOTA)
LUGAR: LARES
3 SEG 10 SEG 30 SEG
TIEMPOS
PTO NTE ESTE COTA PTO NTE ESTE COTA PTO NTE ESTE COTA
100 108532.698 92182.465 2566.436 101 108532.584 92182.394 2566.395 102 108532.552 92182.438 2566.377 PAR/M14
103 108505.347 92204.927 2566.465 104 108505.317 92204.610 2566.302 105 108505.590 92204.600 2566.242 PAR/M0
116 108508.011 92133.352 2566.190 106 108507.483 92133.851 2569.680 107 108507.548 92133.269 2568.933 PAR/M6
108 108510.048 92129.350 2571.302 109 108510.097 92129.332 2570.656 PAR/M7
110 108513.071 92157.224 2566.324 111 108512.079 92157.386 2567.304 PAR/M13
112 108523.833 92144.968 2570.031 PAR/M11
113 108464.889 92151.863 2571.589 PAR/M2
114 108498.994 92122.024 2570.079 115 108499.537 92121.753 2569.395 PAR/M5
117 108504.825 92202.011 2563.931 118 108504.843 92201.984 2563.961 119 108504.901 92202.260 2565.336 PAR/M0
120 108461.733 92151.525 2569.144 121 108461.781 92151.494 2569.104 122 108461.736 92151.533 2569.079 PAR/M2
DESCRIPCION
LUGAR: LARES
3 SEG 10 SEG 30 SEG
COORDENADAS N-TRIP GR-5 (MAGNA CIUDAD BOGOTA)

CAPITULO 4. DESARROLLO DE LA METODOLOGÍA.
70
4.3.5. Diagrama de Flujo.
Ilu
stra
ció
n 4
1.
Dia
gra
ma
de
Flu
jo.
Fu
ente
: A
uto
ría
Pro
pia
.

CAPITULO 5. RESULTADOS.
71
CAPITULO 5.
5. RESULTADOS.
5.1. Datos Usados.
Ilustración 42. Nube Puntos.
Fuente: Autoría Propia.
PUNTO DESCRIPCION HRMS VRMS tiempo distancia PDOPMASCARA
0BSTRUCCIONSATELITES STATUS NOMBRE ARCHIVO
PN100 CD589 0.003 0.005 3.00 20917.45 1.58 0.00 14.00 FIXED USME
PN101 CD589 0.005 0.01 3.00 20917.45 1.60 0.00 14.00 FIXED USME
PN102 CD589 0.002 0.003 10.00 20917.46 1.61 0.00 14.00 FIXED USME
PN103 CD589 0.001 0.002 30.00 20917.46 1.51 0.00 15.00 FIXED USME
PN104 N21 0.003 0.002 30.00 20885.92 1.64 0.00 12.00 FIXED USME
PN105 N21 0.006 0.005 10.00 20885.87 1.69 0.00 12.00 FIXED USME
PN106 N19 0.005 0.009 3.00 20968.61 1.66 0.00 13.00 FIXED USME
PN107 N19 0.002 0.003 10.00 20968.62 1.63 0.00 14.00 FIXED USME
PN108 N19 0.006 0.011 30.00 20968.67 1.41 0.00 16.00 FIXED USME
PN109 N13 0.006 0.011 30.00 21269.00 1.73 40.00 13.00 FIXED USME
PN110 N13 0.003 0.006 10.00 21268.99 1.73 40.00 14.00 FIXED USME
PN111 N13 0.002 0.004 3.00 21268.93 1.64 40.00 14.00 FIXED USME
PN112 N12 0.002 0.003 3.00 21271.41 1.62 40.00 13.00 FIXED USME
PN113 N12 0.007 0.009 10.00 21271.38 1.73 40.00 14.00 FIXED USME
PN114 N12 0.01 0.013 30.00 21271.38 1.73 40.00 13.00 FIXED USME
PN115 N11 0.005 0.009 30.00 21265.24 1.65 40.00 14.00 FIXED USME
PN116 N11 0.003 0.006 10.00 21265.27 1.93 40.00 14.00 FIXED USME
PN117 N11 0.002 0.003 3.00 21265.25 1.66 40.00 14.00 FIXED USME
PN118 N10 0.003 0.005 3.00 21267.90 2.16 40.00 10.00 FIXED USME
PN119 N10 0.005 0.009 10.00 21267.93 2.83 40.00 9.00 FIXED USME
PN120 N10 0.01 0.019 30.00 21267.96 3.36 40.00 9.00 FIXED USME
PN121 N9 0.005 0.01 30.00 21233.74 1.65 40.00 14.00 FIXED USME
PN122 N9 0.003 0.006 10.00 21233.76 1.64 40.00 14.00 FIXED USME
PN123 N9 0.002 0.004 3.00 21233.75 1.98 40.00 13.00 FIXED USME
PN124 N8 0.002 0.003 3.00 21294.00 1.61 20.00 14.00 FIXED USME
PN125 N8 0.004 0.006 10.00 21293.99 1.73 20.00 13.00 FIXED USME
PN126 N8 0.006 0.01 30.00 21294.00 1.69 20.00 14.00 FIXED USME
PN127 N7 0.007 0.013 30.00 21315.56 1.76 20.00 11.00 FIXED USME
PN128 N7 0.003 0.006 10.00 21315.56 1.76 20.00 12.00 FIXED USME
PN129 N1 0.007 0.015 3.00 21347.93 2.96 0.00 8.00 FIXED USME
PN130 N1 0.004 0.008 10.00 21347.94 2.96 0.00 8.00 FIXED USME
PN132 N23 0.003 0.006 30.00 21137.11 1.96 40.00 11.00 FIXED USME
PN133 N23 0.006 0.012 10.00 21137.12 1.96 40.00 11.00 FIXED USME
PN134 N23 0.002 0.004 3.00 21137.12 1.96 40.00 11.00 FIXED USME
PN135 N18 0.009 0.016 30.00 21162.27 1.54 0.00 14.00 FIXED USME
PN136 N18 0.005 0.01 10.00 21162.27 1.57 0.00 14.00 FIXED USME
PN137 N18 0.003 0.006 3.00 21162.29 1.64 0.00 14.00 FIXED USME
PN138 N18 0.002 0.003 3.00 21162.29 1.64 0.00 14.00 FIXED USME
PN139 N19 0.006 0.012 10.00 21356.03 1.88 0.00 12.00 FIXED USME
PN140 N19 0.002 0.004 30.00 21356.05 1.86 0.00 14.00 FIXED USME
PN141 N19 0.004 0.008 30.00 21356.04 2.33 0.00 11.00 FIXED USME
PN142 N11 0.006 0.012 10.00 21504.78 1.92 0.00 13.00 FIXED USME
PN143 N11 0.003 0.007 3.00 21504.78 1.92 0.00 13.00 FIXED USME
PN144 N11 0.002 0.004 3.00 21504.79 1.92 0.00 13.00 FIXED USME
PN145 BGT9 0.001 0.001 10.00 3309.32 1.25 0.00 17.00 FIXED USME
PN146 BGT9 0.001 0.001 30.00 3309.31 1.31 0.00 17.00 FIXED USME
PN147 BGT9 0 0.001 30.00 3309.31 1.36 0.00 16.00 FIXED USME
PN100 PAR/M14 0.003 0.006 3.00 5599.17 2.41 50.00 11.00 FIXED LARES
PN101 PAR/M14 0.003 0.005 10.00 5599.19 2.15 50.00 10.00 FIXED LARES
PN102 PAR/M14 0.001 0.002 30.00 5599.14 2.02 50.00 12.00 FIXED LARES
PN110 PAR/M13 0.001 0.002 10.00 5615.71 2.41 50.00 9.00 FIXED LARES
PN117 PAR/M0 0.002 0.003 3.00 5570.94 1.98 50.00 8.00 FIXED LARES
PN118 PAR/M0 0.003 0.004 10.00 5570.97 2.49 50.00 7.00 FIXED LARES
PN119 PAR/M0 0.003 0.005 30.00 5570.74 1.60 50.00 13.00 FIXED LARES
PN121 PAR/M2 0.002 0.003 10.00 5603.06 1.89 50.00 11.00 FIXED LARES
PN122 PAR/M2 0.002 0.003 30.00 5603.01 1.91 50.00 11.00 FIXED LARES
PN501 DL-A 0.003 0.007 10.00 9532.80 1.95 0.00 13.00 FIXED CALLE 127
PN502 DL-A 0.002 0.005 30.00 9532.81 1.96 0.00 13.00 FIXED CALLE 127
PN506 LINDERO1 0.003 0.005 10.00 9548.11 2.21 50.00 13.00 FIXED CALLE 127
PN507 LINDERO2 0.004 0.006 3.00 9572.36 2.57 50.00 11.00 FIXED CALLE 127
PN508 LINDERO2 0.004 0.006 10.00 9572.41 2.54 50.00 12.00 FIXED CALLE 127
PN509 LINDERO3 0.003 0.006 10.00 9577.11 1.97 50.00 11.00 FIXED CALLE 127
PN510 DL-B 0.003 0.005 3.00 9536.10 1.50 0.00 15.00 FIXED CALLE 127
PN511 DL-B 0.003 0.005 10.00 9536.11 1.55 0.00 14.00 FIXED CALLE 127
PN512 DL-B 0.002 0.004 30.00 9536.12 1.70 0.00 14.00 FIXED CALLE 127
PN513 DL-B 0.004 0.008 10.00 9536.13 1.68 0.00 14.00 FIXED CALLE 127
PN514 DL-B 0.001 0.002 30.00 9536.11 1.48 0.00 15.00 FIXED CALLE 127

CAPITULO 5. RESULTADOS.
72
5.2. Análisis.
Se presenta las diferentes matrices para el modelo matemático “Red De Corrección
Ntrip de Tipo Virtual Reference Station (VRS)”, con el cual se realiza un análisis
exhaustivo que se presenta a continuación, ver Ilustración 43-44.
Ilustración 43. Análisis de Datos.
Fuente: Autoría Propia.
Ilustración 44. Coeficiente de Correlación.
Fuente: Autoría Propia.

CAPITULO 5. RESULTADOS.
73
Ilustración 45. Matriz de Correlación.
Fuente: Autoría Propia.
Como se puede apreciar en la Ilustración 45, se escogieron los índices que en
valor absoluto superasen el valor de 0.2 (el valor de 0.1481289 no se tiene en cuenta
puesto que no hay relación entre el Pdop y la duración total de medición. Se asume
que el Pdop varia por el movimiento de los satélites a medida q pasa el tiempo, pero
esa relación no es válida), los demás valores son cercanos a cero o no son de
importancia, se toma como parámetro que la máscara de obstrucción no depende
del número de satélites, ni de la distancia a la estación permanente, ni del Pdop;
depende de las condiciones presentes en el lugar de medición; por lo tanto se
pueden hacer los siguientes análisis preliminares para tener una idea de las posibles
variables regresoras, y así realizar una menor cantidad de iteraciones para
encontrar el modelo matemático. A simple vista se puede decir que la precisión
horizontal podría depender directamente de la distancia a la estación permanente y
en menores medidas se ve afectado de mayor a menor por: Pdop, número de
satélites y tiempo de medición. (Autoría, 2016.).
Para la precisión vertical, según la teoría en geodesia, esta depende principalmente
de la precisión horizontal, y aquí se confirma cuando el valor se aproxima a uno. Lo
que quiere decir que no es necesario buscar otras variables regresoras, pues estas
estarían incluidas dentro de la precisión horizontal. Se puede confirmar que a mayor
número de satélites el Pdop disminuye. Estas dos últimas premisas confirman que
el análisis de índices de correlación nos da una idea de qué depende el método y
confirma teorías ya existentes en la geodesia.
HRMS VRMS distancia tiempo SATELITES PDOPMASCARA 0BSTRUCCION
HRMS 1
VRMS 0.93693473 1
distancia 0.45674612 0.46127794 1
tiempo 0.17507094 0.15671586 -0.09813868 1
SATELITES -0.20449367 -0.22015722 0.05783106 0.18720078 1
PDOP 0.26903219 0.33465945 -0.0226722 -0.1481289 -0.82430474 1
MASCARA 0BSTRUCCION0.00405827 -0.04496755 -0.22888303 -0.06255575 -0.45132972 0.36633784 1

CAPITULO 5. RESULTADOS.
74
5.2.1. Iteraciones para el Modelo Matemático.
Procedimiento 1.
Ilustración 46. Regresión.
Fuente: Autoría Propia.
Se usa la ecuación: F= a + x1+x2+x3….+error. Donde a es la constante y Xi las variables regresoras.

CAPITULO 5. RESULTADOS.
75
Procedimiento 2.
Ilustración 47. Regresión.
Fuente: Autoría Propia.
Para esta regresión se modifica la constante a cero, ver Ilustración 47.
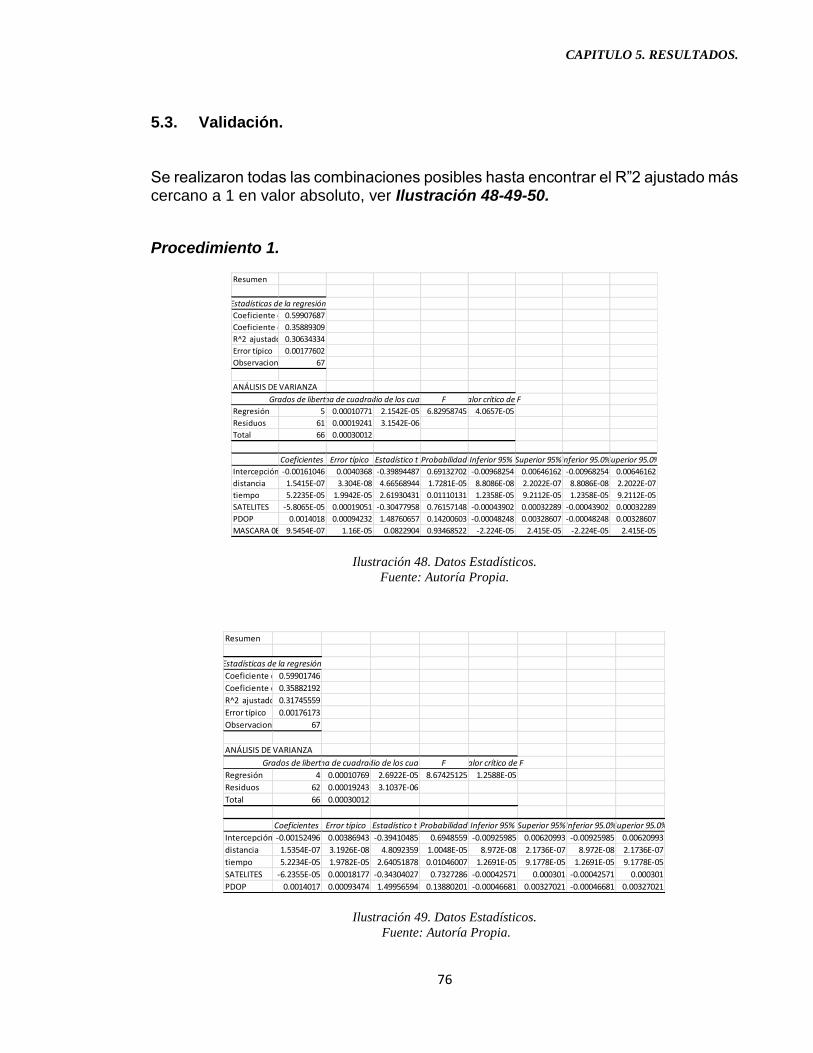
CAPITULO 5. RESULTADOS.
76
5.3. Validación.
Se realizaron todas las combinaciones posibles hasta encontrar el R”2 ajustado más cercano a 1 en valor absoluto, ver Ilustración 48-49-50.
Procedimiento 1.
Ilustración 48. Datos Estadísticos.
Fuente: Autoría Propia.
Ilustración 49. Datos Estadísticos.
Fuente: Autoría Propia.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.59907687
Coeficiente de determinación R^20.35889309
R^2 ajustado 0.30634334
Error típico 0.00177602
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 5 0.00010771 2.1542E-05 6.82958745 4.0657E-05
Residuos 61 0.00019241 3.1542E-06
Total 66 0.00030012
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción -0.00161046 0.0040368 -0.39894487 0.69132702 -0.00968254 0.00646162 -0.00968254 0.00646162
distancia 1.5415E-07 3.304E-08 4.66568944 1.7281E-05 8.8086E-08 2.2022E-07 8.8086E-08 2.2022E-07
tiempo 5.2235E-05 1.9942E-05 2.61930431 0.01110131 1.2358E-05 9.2112E-05 1.2358E-05 9.2112E-05
SATELITES -5.8065E-05 0.00019051 -0.30477958 0.76157148 -0.00043902 0.00032289 -0.00043902 0.00032289
PDOP 0.0014018 0.00094232 1.48760657 0.14200603 -0.00048248 0.00328607 -0.00048248 0.00328607
MASCARA 0BSTRUCCION9.5454E-07 1.16E-05 0.0822904 0.93468522 -2.224E-05 2.415E-05 -2.224E-05 2.415E-05
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.59901746
Coeficiente de determinación R^20.35882192
R^2 ajustado 0.31745559
Error típico 0.00176173
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 4 0.00010769 2.6922E-05 8.67425125 1.2588E-05
Residuos 62 0.00019243 3.1037E-06
Total 66 0.00030012
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción -0.00152496 0.00386943 -0.39410485 0.6948559 -0.00925985 0.00620993 -0.00925985 0.00620993
distancia 1.5354E-07 3.1926E-08 4.8092359 1.0048E-05 8.972E-08 2.1736E-07 8.972E-08 2.1736E-07
tiempo 5.2234E-05 1.9782E-05 2.64051878 0.01046007 1.2691E-05 9.1778E-05 1.2691E-05 9.1778E-05
SATELITES -6.2355E-05 0.00018177 -0.34304027 0.7327286 -0.00042571 0.000301 -0.00042571 0.000301
PDOP 0.0014017 0.00093474 1.49956594 0.13880201 -0.00046681 0.00327021 -0.00046681 0.00327021

CAPITULO 5. RESULTADOS.
77
Ilustración 50. Datos Estadísticos.
Fuente: Autoría Propia.
Procedimiento 2.
Como se observa en las Ilustraciones 51-52-53-54 y con el fin de obtener un
modelo matemático ajustado y confiable, se cambió la configuración de la regresión
lineal múltiple así:
Ilustración 51. Datos Estadísticos.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.53552488
Coeficiente de determinación R^20.2867869
R^2 ajustado 0.24077315
Error típico 0.00185806
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 4 8.607E-05 2.1518E-05 6.2326351 0.00027862
Residuos 62 0.00021405 3.4524E-06
Total 66 0.00030012
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción -0.00152372 0.00422315 -0.36080176 0.71947409 -0.00996566 0.00691823 -0.00996566 0.00691823
distancia 1.4473E-07 3.436E-08 4.21209723 8.3375E-05 7.6044E-08 2.1342E-07 7.6044E-08 2.1342E-07
SATELITES 1.5689E-06 0.00019789 0.00792841 0.99369957 -0.000394 0.00039714 -0.000394 0.00039714
PDOP 0.00144165 0.00098572 1.46252989 0.14864694 -0.00052878 0.00341207 -0.00052878 0.00341207
MASCARA 0BSTRUCCION9.4667E-07 1.2136E-05 0.07800806 0.93807285 -2.3312E-05 2.5205E-05 -2.3312E-05 2.5205E-05
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.91361658
Coeficiente de determinación R^20.83469525
R^2 ajustado 0.8079014
Error típico 0.00176393
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 5 0.00097409 0.00019482 62.6129688 9.8782E-23
Residuos 62 0.00019291 3.1115E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
PDOP 0.00106243 0.00040264 2.63865755 0.01051171 0.00025756 0.0018673 0.00025756 0.0018673
SATELITES -0.00013026 5.9146E-05 -2.20237125 0.03136663 -0.00024849 -1.203E-05 -0.00024849 -1.203E-05
distancia 1.5247E-07 3.2545E-08 4.68474691 1.5771E-05 8.741E-08 2.1752E-07 8.741E-08 2.1752E-07
tiempo 5.217E-05 1.9806E-05 2.63404194 0.01064079 1.2578E-05 9.1761E-05 1.2578E-05 9.1761E-05
MASCARA 0BSTRUCCION-2.3649E-07 1.1133E-05 -0.0212432 0.98311987 -2.249E-05 2.2017E-05 -2.249E-05 2.2017E-05
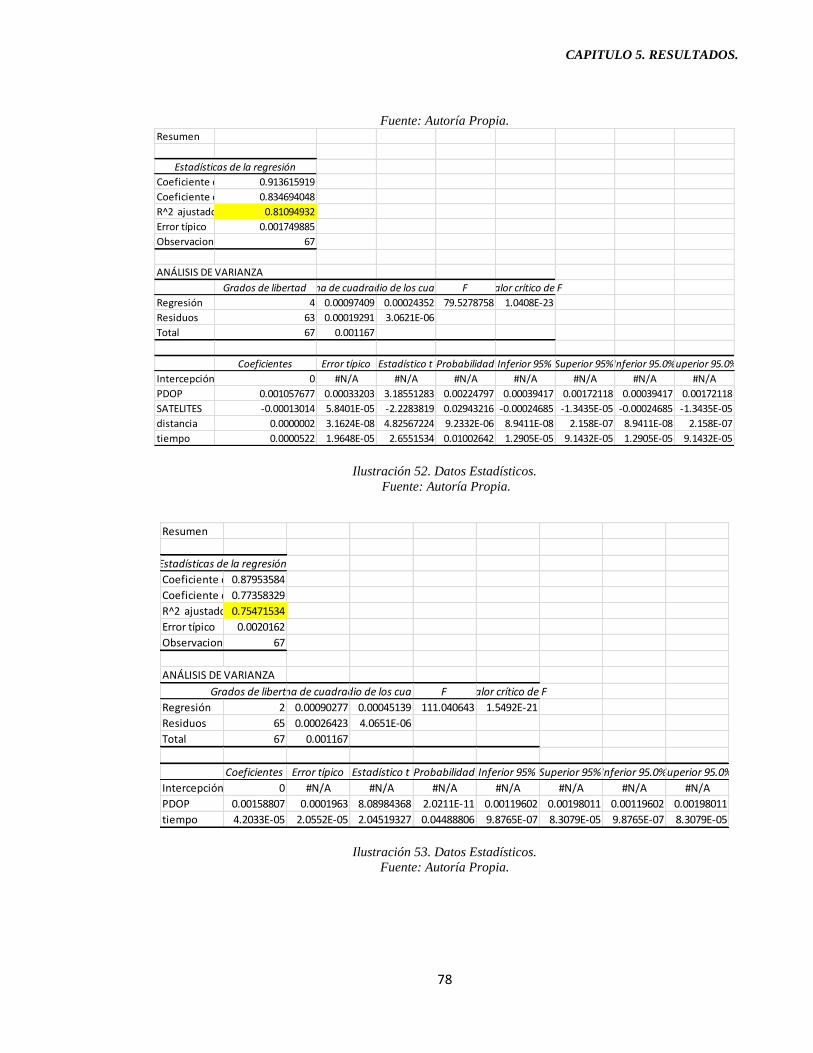
CAPITULO 5. RESULTADOS.
78
Fuente: Autoría Propia.
Ilustración 52. Datos Estadísticos.
Fuente: Autoría Propia.
Ilustración 53. Datos Estadísticos.
Fuente: Autoría Propia.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.913615919
Coeficiente de determinación R^20.834694048
R^2 ajustado 0.81094932
Error típico 0.001749885
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 4 0.00097409 0.00024352 79.5278758 1.0408E-23
Residuos 63 0.00019291 3.0621E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
PDOP 0.001057677 0.00033203 3.18551283 0.00224797 0.00039417 0.00172118 0.00039417 0.00172118
SATELITES -0.00013014 5.8401E-05 -2.2283819 0.02943216 -0.00024685 -1.3435E-05 -0.00024685 -1.3435E-05
distancia 0.0000002 3.1624E-08 4.82567224 9.2332E-06 8.9411E-08 2.158E-07 8.9411E-08 2.158E-07
tiempo 0.0000522 1.9648E-05 2.6551534 0.01002642 1.2905E-05 9.1432E-05 1.2905E-05 9.1432E-05
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.87953584
Coeficiente de determinación R^20.77358329
R^2 ajustado 0.75471534
Error típico 0.0020162
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 2 0.00090277 0.00045139 111.040643 1.5492E-21
Residuos 65 0.00026423 4.0651E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
PDOP 0.00158807 0.0001963 8.08984368 2.0211E-11 0.00119602 0.00198011 0.00119602 0.00198011
tiempo 4.2033E-05 2.0552E-05 2.04519327 0.04488806 9.8765E-07 8.3079E-05 9.8765E-07 8.3079E-05

CAPITULO 5. RESULTADOS.
79
Ilustración 54. Datos Estadísticos.
Fuente: Autoría Propia.
Como se evidencia de acuerdo a los resultados, el R2 mejoró significativamente
para todas las posibles combinaciones, con valores desde 0.74 hasta 0.81, luego
de esto se procedió a seleccionar las 4 siguientes regresiones, ver Ilustración 55.
Ilustración 55. Datos Estadísticos.
Fuente: Autoría Propia.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.89844884
Coeficiente de determinación R^20.80721032
R^2 ajustado 0.78885971
Error típico 0.00186046
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 2 0.00094201 0.00047101 136.077492 8.8816E-24
Residuos 65 0.00022499 3.4613E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
tiempo 5.0376E-05 1.761E-05 2.86062816 0.00567997 1.5206E-05 8.5545E-05 1.5206E-05 8.5545E-05
distancia 1.7102E-07 1.821E-08 9.39139673 1.0185E-13 1.3465E-07 2.0739E-07 1.3465E-07 2.0739E-07
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.913615919
Coeficiente de determinación R^20.834694048
R^2 ajustado 0.81094932
Error típico 0.001749885
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 4 0.00097409 0.00024352 79.5278758 1.0408E-23
Residuos 63 0.00019291 3.0621E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
PDOP 0.001057677 0.00033203 3.18551283 0.00224797 0.00039417 0.00172118 0.00039417 0.00172118
SATELITES -0.00013014 5.8401E-05 -2.2283819 0.02943216 -0.00024685 -1.3435E-05 -0.00024685 -1.3435E-05
distancia 0.0000002 3.1624E-08 4.82567224 9.2332E-06 8.9411E-08 2.158E-07 8.9411E-08 2.158E-07
tiempo 0.0000522 1.9648E-05 2.6551534 0.01002642 1.2905E-05 9.1432E-05 1.2905E-05 9.1432E-05

CAPITULO 5. RESULTADOS.
80
Pdop 1mm por unidad, 0.2 ppm
Este valor cumple lo necesario para ser un modelo, ya que el parámetro F y cada
uno de los T para cada variable, en campo y en práctica sería aplicable. Para un
posicionamiento GNSS se encontrarán como máximo 20 satélites, lo que indica que
si tuviéramos tal cantidad se reduciría el error en 2 mm, aunque en la práctica es
poco; se podrá usar esta fórmula solo sí se requiere saber la precisión del sistema,
de acuerdo a un numero de satélites en específico, su distancia y la duración del
posicionamiento. Además, tiene poco peso para la distancia, por lo general es de
mínimo 1 ppm, aquí da 0.2 ppm, aunque como es una red VRS, cabe la posibilidad
de que este error debido a la ionosfera y la troposfera se vea reducido al máximo.
La variable Tiempo genera ambigüedad puesto que en la teoría geodésica se dice
que a mayor tiempo de medición mayor precisión, pero para este caso no. También
se puede apreciar que no es recomendable tiempos de medición tan largos pues se
puede dar el caso de que el Pdop aumente y el error suba ya que este tiene una
gran incidencia. De otra forma se puede deducir que entre mayor Pdop mayor es el
error en campo y es quizá el parámetro q más peso tiene en la formula. ver
Ilustración 56. (Autoría, 2016.).
Ilustración 56. Datos Estadísticos.
Fuente: Autoría Propia.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.90343563
Coeficiente de determinación R^20.81619595
R^2 ajustado 0.79482707
Error típico 0.00183072
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 3 0.0009525 0.0003175 94.7322962 2.605E-23
Residuos 64 0.0002145 3.3516E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
PDOP 0.00111687 0.00034658 3.22251289 0.00200008 0.00042449 0.00180924 0.00042449 0.00180924
SATELITES -0.000067 5.5756E-05 -1.19669005 0.23584162 -0.00017811 4.4662E-05 -0.00017811 4.4662E-05
distancia 0.0000001 3.2879E-08 4.35696794 4.8708E-05 7.7569E-08 2.0894E-07 7.7569E-08 2.0894E-07

CAPITULO 5. RESULTADOS.
81
Nuevamente el Pdop tiene mayor peso 1mm por unidad, el número de satélites poco
afecta la precisión y la distancia es de 0.1 ppm, ver Ilustración 57.
Ilustración 57. Datos Estadísticos.
Fuente: Autoría Propia.
De acuerdo al enunciado anterior el Pdop para este caso tiene un peso de 0.6 mm
por unidad, la distancia da errores 0.1ppm y a mayor tiempo varia Pdop y disminuye
la precisión, ver Ilustración 58.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.90645715
Coeficiente de determinación R^20.821664565
R^2 ajustado 0.800466582
Error típico 0.001803285
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 3 0.00095888 0.00031963 98.2914248 1.0065E-23
Residuos 64 0.00020812 3.2518E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
tiempo 0.00003426 1.8477E-05 1.85432681 0.06830094 -2.6496E-06 7.1174E-05 -2.6496E-06 7.1174E-05
distancia 0.00000012 2.8737E-08 4.15392971 9.8722E-05 6.1963E-08 1.7678E-07 6.1963E-08 1.7678E-07
PDOP 0.00065104 0.00028585 2.27755458 0.02610291 7.9988E-05 0.00122209 7.9988E-05 0.00122209

CAPITULO 5. RESULTADOS.
82
Ilustración 58. Datos Estadísticos.
Fuente: Autoría Propia.
Se pudo apreciar que en promedio el error por distancia es de 0.12 ppm. Y el Pdop
0.8 mm por unidad.
De acuerdo a lo anterior se evidencia que: una red VRS corrige los errores
generados por la troposfera y la ionosfera, pues en promedio la ppm fue de 0.1 ppm,
más bajo que para NTRIP de una sola base que es de 1ppm, se aprecia que el Pdop
afecta la precisión del sistema, por lo general en 1mm por unidad de Pdop. El tiempo
de grabación para NTRIP debe ser bajo, puesto que aumenta la probabilidad de que
cambie la geometría satélital, disminuyendo la precisión del sistema, pues según
varios modelos, a mayor tiempo de medición menor precisión, la cantidad de
satélites máxima, disminuye como máximo en 2mm el error para una red VRS. De
esta manera al realizar una correlación entre el número de satélites y Pdop
instantáneo, se aprecia que a mayor número de satélites el Pdop disminuye.
(Autoría, 2016.).
Veamos, Ilustración 59.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.90115656
Coeficiente de determinación R^20.81208314
R^2 ajustado 0.79380749
Error típico 0.0018368
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 2 0.0009477 0.00047385 140.448821 3.9055E-24
Residuos 65 0.0002193 3.3738E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
PDOP 0.000854 0.00026897 3.17504071 0.0022907 0.00031682 0.00139118 0.00031682 0.00139118
distancia 0.00000012 2.9121E-08 4.28448178 6.1791E-05 6.6609E-08 1.8293E-07 6.6609E-08 1.8293E-07

CAPITULO 5. RESULTADOS.
83
Ilustración 59. PDOP vs número de satélites.
Fuente: Autoría Propia.
Entonces finalmente sabiendo que los tiempos de medición deben ser cortos, se
recomiendan 3 segundos, para ello se plantea la siguiente ecuación, ver Ecuación
1.
Ilustración 60. Análisis Estadístico.
Fuente: Autoría Propia.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.82430474
Coeficiente de determinación R^20.67947831
R^2 ajustado 0.67454721
Error típico 0.23403245
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 1 7.54716266 7.54716266 137.794389 1.0353E-17
Residuos 65 3.56012734 0.05477119
Total 66 11.10729
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 3.88848782 0.17364183 22.3937274 2.8884E-32 3.54170114 4.23527451 3.54170114 4.23527451
SATELITES -0.1588475 0.01353208 -11.7385855 1.0353E-17 -0.18587294 -0.13182207 -0.18587294 -0.13182207
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.90343563
Coeficiente de determinación R^20.81619595
R^2 ajustado 0.79482707
Error típico 0.00183072
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 3 0.0009525 0.0003175 94.7322962 2.605E-23
Residuos 64 0.0002145 3.3516E-06
Total 67 0.001167
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
PDOP 0.00111687 0.00034658 3.22251289 0.00200008 0.00042449 0.00180924 0.00042449 0.00180924
SATELITES -0.000067 5.5756E-05 -1.19669005 0.23584162 -0.00017811 4.4662E-05 -0.00017811 4.4662E-05
distancia 0.0000001 3.2879E-08 4.35696794 4.8708E-05 7.7569E-08 2.0894E-07 7.7569E-08 2.0894E-07
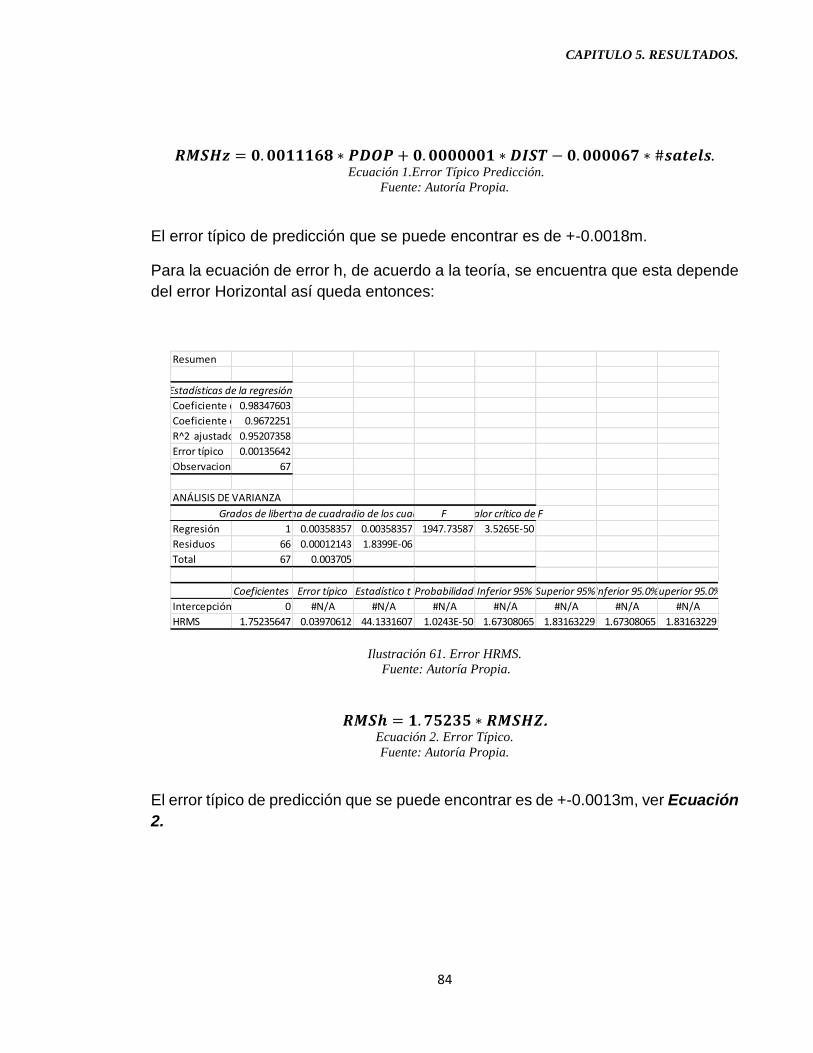
CAPITULO 5. RESULTADOS.
84
𝑹𝑴𝑺𝑯𝒛 = 𝟎. 𝟎𝟎𝟏𝟏𝟏𝟔𝟖 ∗ 𝑷𝑫𝑶𝑷 + 𝟎. 𝟎𝟎𝟎𝟎𝟎𝟎𝟏 ∗ 𝑫𝑰𝑺𝑻 − 𝟎. 𝟎𝟎𝟎𝟎𝟔𝟕 ∗ #𝒔𝒂𝒕𝒆𝒍𝒔.
Ecuación 1.Error Típico Predicción.
Fuente: Autoría Propia.
El error típico de predicción que se puede encontrar es de +-0.0018m.
Para la ecuación de error h, de acuerdo a la teoría, se encuentra que esta depende
del error Horizontal así queda entonces:
Ilustración 61. Error HRMS.
Fuente: Autoría Propia.
𝑹𝑴𝑺𝒉 = 𝟏. 𝟕𝟓𝟐𝟑𝟓 ∗ 𝑹𝑴𝑺𝑯𝒁. Ecuación 2. Error Típico.
Fuente: Autoría Propia.
El error típico de predicción que se puede encontrar es de +-0.0013m, ver Ecuación
2.
Resumen
Estadísticas de la regresión
Coeficiente de correlación múltiple0.98347603
Coeficiente de determinación R^20.9672251
R^2 ajustado 0.95207358
Error típico 0.00135642
Observaciones 67
ANÁLISIS DE VARIANZA
Grados de libertadSuma de cuadradosPromedio de los cuadradosF Valor crítico de F
Regresión 1 0.00358357 0.00358357 1947.73587 3.5265E-50
Residuos 66 0.00012143 1.8399E-06
Total 67 0.003705
Coeficientes Error típico Estadístico t Probabilidad Inferior 95% Superior 95%Inferior 95.0%Superior 95.0%
Intercepción 0 #N/A #N/A #N/A #N/A #N/A #N/A #N/A
HRMS 1.75235647 0.03970612 44.1331607 1.0243E-50 1.67308065 1.83163229 1.67308065 1.83163229

CAPITULO 5. RESULTADOS.
85
5.4. Aplicación del Módelo.
RMSH RMSV DISTANCIA NUMERO SAT PDOP
0.003 0.005 10 10 3
0.003 0.005 1000 10 3
0.004 0.006 10000 10 3
0.008 0.013 50000 10 3
RMSH RMSV DISTANCIA NUMERO SAT PDOP
0.002 0.004 10 15 3
0.002 0.004 1000 15 3
0.003 0.006 10000 15 3
0.007 0.013 50000 15 3
RMSH RMSV DISTANCIA NUMERO SAT PDOP
0.001 0.002 10 15 2
0.001 0.002 1000 15 2
0.002 0.004 10000 15 2
0.006 0.011 50000 15 2
RMSH RMSV DISTANCIA NUMERO SAT PDOP
0.001 0.002 10 20 2
0.001 0.002 1000 20 2
0.002 0.003 10000 20 2
0.006 0.010 50000 20 2 Tabla 13. Aplicación Modelo.
Fuente: Autoría Propia.
5.5. Resultados.
A continuación, se presenta los resultados obtenidos y las diferencias entre los
métodos utilizados.

CAPITULO 5. RESULTADOS.
86
CALLE 127.
Tabla 14. Coordenadas Magna Colombia Bogotá-CLL 127.
Fuente: Autoría Propia.
Tabla 15. Coordenadas Magna Ciudad Bogotá-CLL 127.
Fuente: Autoría Propia.
PTO NTE ESTE COTA DESCRIPCION
501 1011643.852 1005442.947 2595.144 DL
502 1011643.859 1005442.947 2595.156 DL
503 1011644.885 1005449.217 2596.414 LINDERO
504 1011644.706 1005453.962 2597.383 LINDERO
505 1011655.124 1005453.56 2602.16 LINDERO
506 1011655.964 1005453.379 2598.337 LINDERO
507 1011696.834 1005455.978 2598.256 LINDERO
508 1011696.832 1005456.033 2598.27 LINDERO
509 1011696.834 1005461.624 2598.797 LINDERO
510 1011719.422 1005398.169 2594.743 LINDERO
511 1011719.422 1005398.176 2594.744 LINDERO
512 1011719.42 1005398.196 2594.711 DL
513 1011719.418 1005398.203 2594.705 DL
514 1011719.412 1005398.189 2594.702 DL
LUGAR: CLL 127
COORDENADAS N-TRIP GR-5 (MAGNA COLOMBIA BOGOTA)
PTO NTE ESTE COTA DESCRIPCION
501 111646.221 105447.739 2595.144 DL
502 111646.229 105447.739 2595.156 DL
503 111647.255 105454.012 2596.414 LINDERO
504 111647.076 105458.759 2597.383 LINDERO
505 111657.499 105458.355 2602.160 LINDERO
506 111658.340 105458.174 2598.337 LINDERO
507 111699.226 105460.770 2598.256 LINDERO
508 111699.224 105460.825 2598.270 LINDERO
509 111699.227 105466.418 2598.797 LINDERO
510 111721.817 105402.935 2594.743 LINDERO
511 111721.817 105402.943 2594.744 LINDERO
512 111721.815 105402.962 2594.711 DL
513 111721.814 105402.970 2594.705 DL
514 111721.807 105402.956 2594.702 DL
COORDENADAS N-TRIP GR-5 (MAGNA CIUDAD BOGOTA)
LUGAR: CLL 127

CAPITULO 5. RESULTADOS.
87
Tabla 16. Diferencias Métodos Levantamientos CL127.
Fuente: Autoría Propia.
LARES.
Tabla 17. Coordenadas Magna Colombia Bogotá-LARES.
Fuente: Autoría Propia.
MOJON NORTE ESTE DESCRIPCION
N1 VS 503 0.035 0.348 LINDERO
N6 VS 504 0.534 0.109 LINDERO
N5 VS 506 0.040 0.084 LINDERO
N3 VS 509 0.043 0.308 LINDERO
DIFERENCIAS COORDENADAS LVTO CONVENCIONAL vs NTRIP
LUGAR: CLL 127
OBSERVACION: SE TOMAN EL PUNTO MAS APROXIMADO AL INCORPORADO.
PTO NTE ESTE COTA DESCRIPCION
100 1008532.881 992182.674 2566.436 PAR
101 1008532.768 992182.604 2566.395 PAR
102 1008532.735 992182.648 2566.377 PAR
103 1008505.538 992205.124 2566.465 PAR
104 1008505.509 992204.807 2566.302 PAR
105 1008505.782 992204.798 2566.242 PAR
106 1008507.681 992134.078 2569.68 PAR
107 1008507.746 992133.495 2568.933 PAR
108 1008510.246 992129.578 2571.302 PAR
109 1008510.295 992129.56 2570.656 PAR
110 1008513.265 992157.441 2566.324 PAR
111 1008512.272 992157.603 2567.304 PAR
112 1008524.024 992145.191 2570.031 PAR
113 1008465.102 992152.078 2571.589 PAR
114 1008499.197 992122.254 2570.079 PAR
115 1008499.74 992121.983 2569.395 PAR
116 1008508.209 992133.579 2566.19 PAR
117 1008505.017 992202.21 2563.931 PAR
118 1008505.035 992202.183 2563.961 PAR
119 1008505.093 992202.459 2565.336 PAR
120 1008461.948 992151.739 2569.144 PAR
121 1008461.996 992151.709 2569.104 PAR
122 1008461.95 992151.747 2569.079 PAR
LUGAR: LARES
COORDENADAS N-TRIP GR-5 (MAGNA COLOMBIA BOGOTA)

CAPITULO 5. RESULTADOS.
88
Tabla 18. Coordenadas Magna Ciudad Bogotá-LARES.
Fuente: Autoría Propia.
Tabla 19. Diferencias Métodos Levantamientos Lares.
Fuente: Autoría Propia.
PTO NTE ESTE COTA DESCRIPCION
100 108532.698 92182.465 2566.436 PAR
101 108532.584 92182.394 2566.395 PAR
102 108532.552 92182.438 2566.377 PAR
103 108505.347 92204.927 2566.465 PAR
104 108505.317 92204.610 2566.302 PAR
105 108505.590 92204.600 2566.242 PAR
106 108507.483 92133.851 2569.680 PAR
107 108507.548 92133.269 2568.933 PAR
108 108510.048 92129.350 2571.302 PAR
109 108510.097 92129.332 2570.656 PAR
110 108513.071 92157.224 2566.324 PAR
111 108512.079 92157.386 2567.304 PAR
112 108523.833 92144.968 2570.031 PAR
113 108464.889 92151.863 2571.589 PAR
114 108498.994 92122.024 2570.079 PAR
115 108499.537 92121.753 2569.395 PAR
116 108508.011 92133.352 2566.190 PAR
117 108504.825 92202.011 2563.931 PAR
118 108504.843 92201.984 2563.961 PAR
119 108504.901 92202.260 2565.336 PAR
120 108461.733 92151.525 2569.144 PAR
121 108461.781 92151.494 2569.104 PAR
122 108461.736 92151.533 2569.079 PAR
COORDENADAS N-TRIP GR-5 (MAGNA CIUDAD BOGOTA)
LUGAR: LARES
MOJON NORTE ESTE DESCRIPCION
N1 VS 104 1.317 0.510 LINDERO
N2 VS 122 0.164 0.367 LINDERO
N3 VS 115 0.437 0.353 LINDERO
N4 VS 107 0.148 0.969 LINDERO
N5 VS 109 0.903 0.168 LINDERO
N6 VS 112 1.567 1.632 LINDERO
N7 VS 111 0.921 0.014 LINDERO
N8 VS 101 0.484 0.306 LINDERO
DIFERENCIAS COORDENADAS LVTO CONVENCIONAL vs NTRIP
LUGAR: LARES
OBSERVACION: SE TOMAN EL PUNTO MAS APROXIMADO AL INCORPORADO.
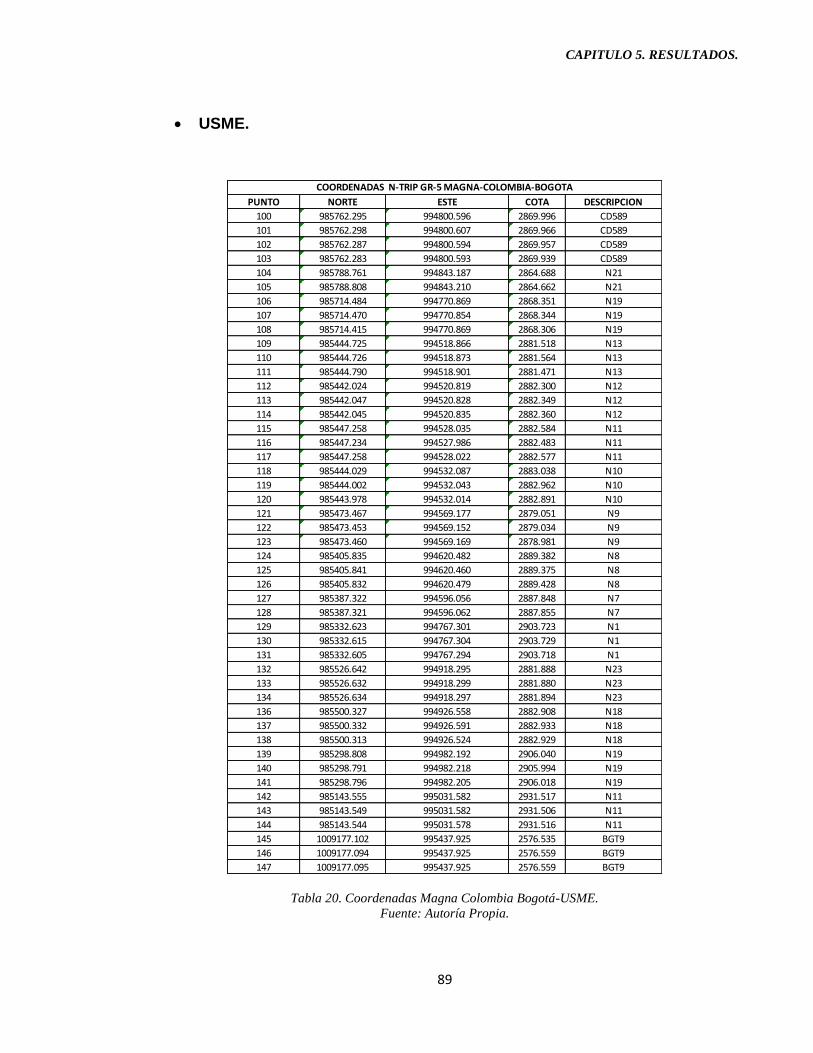
CAPITULO 5. RESULTADOS.
89
USME.
Tabla 20. Coordenadas Magna Colombia Bogotá-USME.
Fuente: Autoría Propia.
PUNTO NORTE ESTE COTA DESCRIPCION
100 985762.295 994800.596 2869.996 CD589
101 985762.298 994800.607 2869.966 CD589
102 985762.287 994800.594 2869.957 CD589
103 985762.283 994800.593 2869.939 CD589
104 985788.761 994843.187 2864.688 N21
105 985788.808 994843.210 2864.662 N21
106 985714.484 994770.869 2868.351 N19
107 985714.470 994770.854 2868.344 N19
108 985714.415 994770.869 2868.306 N19
109 985444.725 994518.866 2881.518 N13
110 985444.726 994518.873 2881.564 N13
111 985444.790 994518.901 2881.471 N13
112 985442.024 994520.819 2882.300 N12
113 985442.047 994520.828 2882.349 N12
114 985442.045 994520.835 2882.360 N12
115 985447.258 994528.035 2882.584 N11
116 985447.234 994527.986 2882.483 N11
117 985447.258 994528.022 2882.577 N11
118 985444.029 994532.087 2883.038 N10
119 985444.002 994532.043 2882.962 N10
120 985443.978 994532.014 2882.891 N10
121 985473.467 994569.177 2879.051 N9
122 985473.453 994569.152 2879.034 N9
123 985473.460 994569.169 2878.981 N9
124 985405.835 994620.482 2889.382 N8
125 985405.841 994620.460 2889.375 N8
126 985405.832 994620.479 2889.428 N8
127 985387.322 994596.056 2887.848 N7
128 985387.321 994596.062 2887.855 N7
129 985332.623 994767.301 2903.723 N1
130 985332.615 994767.304 2903.729 N1
131 985332.605 994767.294 2903.718 N1
132 985526.642 994918.295 2881.888 N23
133 985526.632 994918.299 2881.880 N23
134 985526.634 994918.297 2881.894 N23
136 985500.327 994926.558 2882.908 N18
137 985500.332 994926.591 2882.933 N18
138 985500.313 994926.524 2882.929 N18
139 985298.808 994982.192 2906.040 N19
140 985298.791 994982.218 2905.994 N19
141 985298.796 994982.205 2906.018 N19
142 985143.555 995031.582 2931.517 N11
143 985143.549 995031.582 2931.506 N11
144 985143.544 995031.578 2931.516 N11
145 1009177.102 995437.925 2576.535 BGT9
146 1009177.094 995437.925 2576.559 BGT9
147 1009177.095 995437.925 2576.559 BGT9
COORDENADAS N-TRIP GR-5 MAGNA-COLOMBIA-BOGOTA

CAPITULO 5. RESULTADOS.
90
Tabla 21. Coordenadas Magna Ciudad Bogotá-USME. Fuente: Autoría Propia.
PUNTO NORTE ESTE COTA DESCRIPCION
3 85753.263 94803.619 2869.9567 CD589
4 85753.260 94803.617 2869.9394 CD589
5 85779.752 94846.226 2864.6880 N21
6 85779.799 94846.249 2864.6618 N21
7 85705.438 94773.886 2868.3513 N19
8 85705.425 94773.871 2868.3436 N19
9 85705.369 94773.887 2868.3063 N19
10 85435.548 94521.808 2881.5184 N13
11 85435.549 94521.815 2881.5641 N13
12 85435.613 94521.843 2881.4707 N13
13 85432.846 94523.762 2882.2995 N12
14 85432.869 94523.771 2882.3487 N12
15 85432.867 94523.778 2882.3601 N12
16 85438.083 94530.981 2882.5844 N11
17 85438.059 94530.931 2882.4829 N11
18 85438.083 94530.967 2882.5771 N11
19 85434.853 94535.034 2883.0379 N10
20 85434.826 94534.990 2882.9615 N10
21 85434.802 94534.961 2882.8912 N10
22 85464.306 94572.136 2879.0507 N9
23 85464.292 94572.111 2879.0341 N9
24 85464.299 94572.128 2878.9812 N9
25 85396.652 94623.468 2889.3820 N8
26 85396.658 94623.446 2889.3752 N8
27 85396.649 94623.465 2889.4283 N8
28 85378.130 94599.034 2887.8485 N7
29 85378.129 94599.040 2887.8552 N7
30 85323.424 94770.353 2903.7233 N1
31 85323.417 94770.356 2903.7286 N1
32 85323.407 94770.346 2903.7177 N1
33 85517.535 94921.389 2881.8878 N23
34 85517.525 94921.392 2881.8805 N23
35 85517.527 94921.391 2881.8939 N23
36 85491.210 94929.657 2882.9081 N18
37 85491.216 94929.690 2882.9333 N18
38 85491.197 94929.623 2882.9291 N18
39 85289.616 94985.333 2906.0397 N19
40 85289.599 94985.359 2905.9941 N19
41 85289.604 94985.346 2906.0185 N19
42 85134.305 95034.757 2931.5172 N11
43 85134.299 95034.757 2931.5065 N11
44 85134.295 95034.753 2931.5156 N11
45 109177.496 95438.952 2576.5350 BGT9
46 109177.488 95438.952 2576.5592 BGT9
47 109177.489 95438.952 2576.5591 BGT9
COORDENADAS N-TRIP GR-5 MAGNA-CIUDAD-BOGOTA

CAPITULO 5. RESULTADOS.
91
Tabla 22. Diferencias Métodos Levantamientos Usme.
Fuente: Autoría Propia.
MOJON NORTE ESTE DESCRIPCION
N1 VS 130 3.217 3.556 LINDERO
N7 VS 128 1.429 0.140 LINDERO
N8 VS 125 1.858 0.054 LINDERO
N9 VS 122 1.692 0.211 LINDERO
N10 VS 119 9.874 13.010 LINDERO
N11 VS 116 11.841 13.269 LINDERO
N12 VS 113 2.131 0.229 LINDERO
N13 VS 110 7.951 8.615 LINDERO
N19 VS 107 12.475 5.429 LINDERO
N21 VS 105 0.999 0.951 LINDERO
N23 VS 133 0.625 0.292 LINDERO
OBSERVACION: SE TOMAN EL PUNTO MAS APROXIMADO AL INCORPORADO.
DIFERENCIAS COORDENADAS LVTO CONVENCIONAL vs NTRIP
LUGAR: LARES

CAPITULO 6. CONCLUSIONES.
92
CAPITULO 6.
6. CONCLUSIONES.
6.1. Conclusiones.
Se cumplió el objetivo principal de este trabajo, el cual era diseñar e implementar la
metodología, aplicada a la verificación en campo de diferentes Levantamientos
Topográficos, los cuales desarrollaron el proceso de incorporación topográfica a la
cartografía oficial del Distrito Capital.
Desde el punto de vista práctico, este trabajo se describe el procedimiento para
aplicar la tecnología NTRIP, a partir del manejo de los equipos que proporciona la
universidad, los cuales cumplen con los parámetros requeridos, plasmando su
configuración, descargue y entrega de información.
Se describió puntualmente cada uno de los pasos para utilizar la tecnología NTRIP,
con las antenas Topcon GR-5, desde la identificación y configuración de los
equipos, toma de información y entrega de resultados.
Se identificaron los parámetros requeridos para el traslado del sistema de
referencia, como fue el de Magna Colombia Bogotá al Magna Ciudad Bogotá,
referido al Dátum horizontal y vertical para la ciudad.
Como alternativa, se evidenció las bondades de la precisión arrojada por la
tecnología NTRIP, producto de las coordenadas obtenidas en campo, posterior
traslado de época y sus diferencias con respecto a las certificaciones Igac de los
vértices. Adicionalmente se encontró que para los vértices del predio USME y placa
CD-589-USME arrojó diferencias mayores a los 20 cm, producto de la distancia
entre la antena Base y Rover o problemas en la estabilidad de la señal internet.
Respecto a las características de la tecnología NTRIP se encontró que es
importante realizar una planificación de la zona a trabajar en cuanto a señal de
internet, distancia de la zona de proyecto y la antena CORS, obstrucciones en la

CAPITULO 6. CONCLUSIONES.
93
señal GPS que se puedan presentar en la ubicación de los vértices del
levantamiento. Adicionalmente se evidenció que para este tipo de Levantamientos
la comisión de trabajo puede estar conformada por tan solo dos integrantes (Ing.
Topográfico y Auxiliar) y su entrega de resultados suministrados en tiempo real.
Como conclusión final y dentro del desarrollo de este trabajo fue posible comprender
la evolución de los sistemas de posicionamiento global GPS, su importancia en los
procesos de la geodesia y la topografía, incluyendo aportes de mejoramiento en la
precisión de los posicionamientos para la obtención de coordenadas.
6.2. Aportes Originales.
La contribución de la implementación de esta metodología, se puede desarrollar
dentro de la visión pensada, que se tiene para el postconflicto dentro del proceso
de paz.
• A partir de la ley 1753 de 2015 que corresponde al plan de desarrollo que en
su capítulo 3 Transformación del Campo establece:
• Artículo 104, el gobierno nacional a través de diferentes entidades entre
ellas el IGAC reglamentará el Catastro Multipropósito.
• Artículo 105, Rectificación Administrativa de Áreas y Linderos, en la cual se
establece definir la ubicación, individualización, georreferenciación,
determinación de linderos y condiciones físicas del predio.
Se recomienda minimizar la distancia entre el punto posicionado y la antena CORS,
por cuanto el tiempo de observación y la precisión están en función de la distancia
a esta antena.
Es de gran importancia tener en cuenta el parámetro de la máscara de elevación,
no debe ser inferior a 15°, para mantener una geometría adecuada de los satélites.
Adicionalmente la configuración de los equipos en cuanto a parámetros,
especificaciones técnicas, y la sincronización de los mismos, determinará la bondad
de los resultados.
A partir de los resultados y la implementación de un modelo matemático propuesto
en la metodología, se logró analizar diferentes parámetros, por ejemplo para el
Pdop, se encontró que la variación es por la geometría de los satélites, dentro del

CAPITULO 6. CONCLUSIONES.
94
lapso de tiempo determinado para la lectura, por lo tanto a mayor tiempo de
medición disminuye la calidad del Pdop, la cantidad máxima de satélites disminuye
como máximo en 2mm el error para una red VRS, de esta manera al realizar una
correlación entre el número de satélites y Pdop instantáneo se aprecia que a mayor
número de satélites el Pdop disminuye.
Por otro lado, al realizar los análisis producto de la correlación entre los diferentes
componentes del modelo, la máscara de obstrucción, el número de satélites y la
distancia a la estación permanente, se observa que la precisión horizontal depende
fuertemente de la distancia entre el punto posicionado, a la estación permanente y
en menores medidas se ve afectado de mayor a menor por: Pdop, número de
satélites y tiempo de medición.
Debido a esto, para la precisión vertical, según la teoría en geodesia, esta depende
principalmente de la precisión horizontal, y para nuestro caso, se confirma pues su
valor se acerca a uno, (ejercicio regresión) lo que quiere decir que no es necesario
buscar otras variables regresoras, pues estas se incluyen dentro de la precisión
horizontal.
Por otra parte, como resultado de la investigación estadística presentada, es posible
concluir que una red VRS dentro los 50 KM tendrá precisiones milimétricas siempre
y cuando el Pdop sea menor que 3 y el tiempo de medición menor a 3 segundos.
En una red VRS el número de satélites no es importante, mientras que para Ntrip
de una sola base este es de gran importancia, así como la distancia y el Pdop.
De acuerdo al desarrollo de la metodología y el modelo matemático propuesto se
confirman teorías ya existentes en la geodesia, con respecto a los tiempos de
observación, distancia entre el punto donde se realiza el posicionamiento y la
distancia a la base.
6.3. Limitaciones.
Este proyecto de investigación estuvo sujeto a la disponibilidad o efectividad en la
señal de radio entra la estación base y la señal del receptor dispuesto por el usuario,
esto, para la adquisición de las correcciones diferenciales y su posterior
transferencia al colector.

CAPITULO 6. CONCLUSIONES.
95
Al emplear un teléfono móvil, como modem se pueden presentar dificultades para
obtener la información de la empresa de telefonía celular, por lo tanto, se requiere
definir la transmisión de datos que sea más óptima y estable.
Se requiere definir qué tipo de equipo se ha de emplear y la precisión que se desea
obtener, dependiendo de los requisitos al proyecto que se emplee.

ANEXOS.
96
A. REGISTRO FOTOGRÁFICO.
Ilustración 62. Posicionamiento Vértice Igac Bogotá 9.
Fuente: Autoría Propia.

ANEXOS.
97
Ilustración 63. Posicionamiento Vértice Igac CD-USME-589.
Fuente: Autoría Propia.

ANEXOS.
98
Ilustración 64. Posicionamiento Levantamiento Predio Usme.
Fuente: Autoría Propia.

ANEXOS.
99
Ilustración 65. Posicionamiento Levantamiento Predio CL 127.
Fuente: Autoría Propia.

ANEXOS.
100
Ilustración 66. Posicionamiento Levantamiento Predio Lares.
Fuente: Autoría Propia.

ANEXOS.
101
B. PLANOS TOPOGRÁFICOS FINALES.
Ilustración 67. Plano Topográfico Final Predio Usme.
Fuente: Autoría Propia.

ANEXOS.
102
Ilustración 68. Plano Topográfico Final Predio Lares.
Fuente: Autoría Propia.
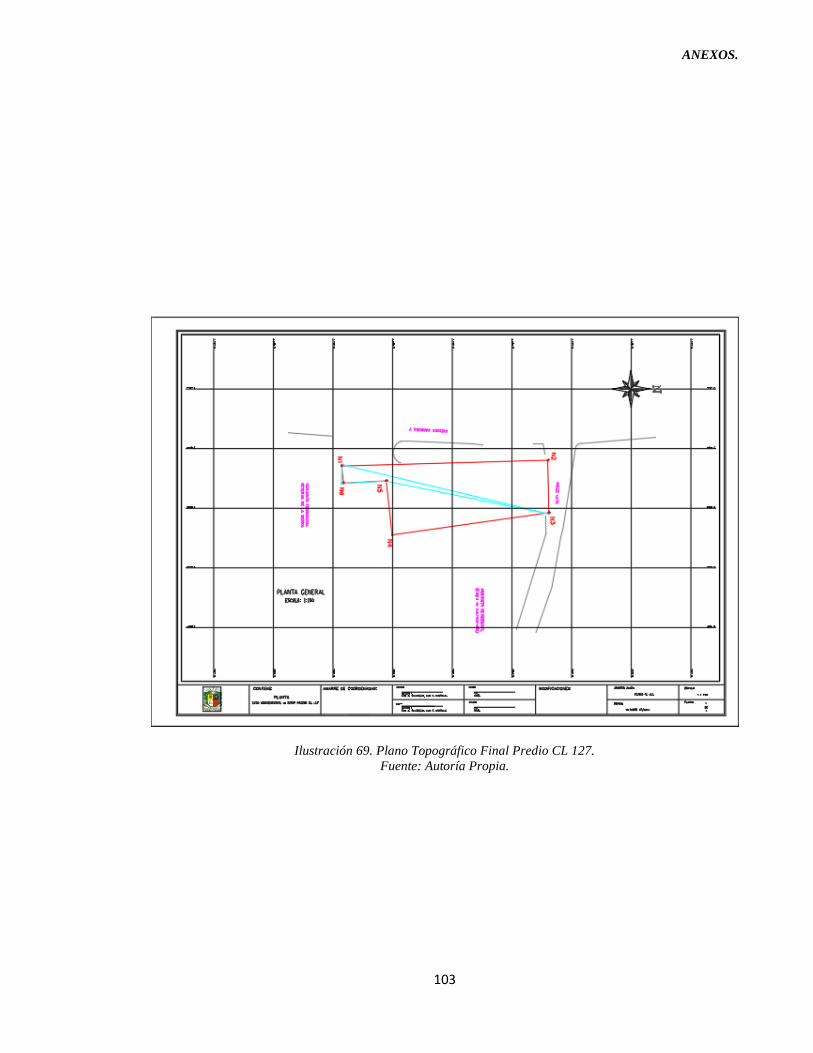
ANEXOS.
103
Ilustración 69. Plano Topográfico Final Predio CL 127.
Fuente: Autoría Propia.

BIBLIOGRAFÍA.
104
BIBLIOGRAFÍA.
Norma UAECD: Resolucion Num. 813. (13 de Agosto de 2010). Colombia, Bogotá.
Alvarez, C. (2014.). Implementación de Mediciones GNSS con Correccion
Diferencial via Internet.
Alvarez, I. (2011). Implementación de Mediciones GNSS para la Realización de
Correcciones Diferenciales en Tiempo Real meciante el uso de NTRIP.
Quito, Ecuador.: Facultad de Ingeniería Geográfica.
Autoría, P. (2016.). METODOLOGÍA PARA EL ANÁLISIS Y VERIFICACIÓN DE
LEVANTAMIENTOS TOPOGRÁFICOS MEDIANTE LA TECNOLOGÍA
NTRIP PARA LA INCORPORACIÓN A LA CARTOGRAFÍA DEL DISTRITO
CAPITAL. Bogotá, Colombia.
Chubb, M. (1984.). El Proceso de la Investigación. Madrid, España.: Fundación
para Estudios de Investigaciones Geográficas.
Codazzi., I. G. (22 de 10 de 2003). NORMA TECNICA COLOMBIANA NTC 5205.
Precisión de Datos Espaciales. Bogotá., Colombia.: Normas Técnicas y
Certificación.
Farjas, M. (2003.). Teoría de Levantamientos Topográficos. Madrid.: Ediciones
Técnicas y Científicas.
Fernandéz Pirla, S. (2003.). Compendio de Arquitectura Legal. Montevideo,
Uruguay.: Reverté.
FGDC, F. G. (1998). Geospatial, Positioning Accuracy Standards. Virginia., EUA.:
FGDC-STD-007.3-1998.
H., M. (2008.). Avances en Instrumentación Científica Asociada a la Geodinámica
del Territorio Colombiano. SUCESOS 132. INGEOMINAS., 6-7.
H., M. (2008.). Servicio Geológico Colombiano. Obtenido de [email protected].
Hermann Drewes, W. M. (2012). SIRGAS. Obtenido de
http://www.sirgas.org/fileadmin/docs/Boletines/Bol17/Drewes_et_al_Velocid
ades_MAGNA.pdf

BIBLIOGRAFÍA.
105
Hoyer, M. (2010.). Avances en la Materialización del Marco de Referencia SIRGAS
en Tiempo Real mediante NTRIP. Lima, Perú.: SIRGASTR.
Hoyer, M. (2010.). Experiencias Personales de NTRIP en Venezuela. Lima, Perú.:
SIRGARTR.
Leick, A. (2004). GPS SATELLITE SURVEYING. New Jersey: WILEY.
Márquez Prieto, A. (2013.). NTRIP Herramienta Indispensable para la Cartografia
y el Catastro. Miranda, Venezuela.
Mora H, C. S. (2009.). Banco de Pruebas Instrumentales del Proyecto GEORED.
Bogotá, Colombia.
Mouron, D. (2008). Curso avanzado de posicionamiento por satelite. En A. Dalda
Mouron, F. J. Gonzales, M. A. Cano, J. a. Sanchez Sobrino, & M. Perez de
Vargas, curso avanzado de posicionamiento por satelite. Madrid.
Oberti., M. V. (2005.). Redes de Estaciones Permanentes GPS. Una Respuesta al
Problema de Materializar el Sistema de Referencia Terrestre. Madrid,
España.
Ormeño, s. (2004.). Cartografía Temática. Modelización y Aplicaciones
Ambientales. Madrid, España.: ETSI.
Romero, R. (2012.). Envío de Correcciones Diferenciales de las Mediciones GNSS
en Tiempo Real (NTRIP). Quito, Ecuador.: CEINCI.
Técnicos., C. O. (2001). FUNDAMENTOS DEL SISTEMA GPS Y APLICACIÓN
EN LA TOPOGRAFÍA. Madrid., Castilla-La Mancha., España.: Colegio
Oficial de Ingenieros.
Zulia., F. d. (12. de Diciembre. de 2009.). Scielo. Recuperado el 01. de Marzo. de
2016., de Scielo.: http://www.scielo.org.ve/.