Universidad de Valladolid - Albergue de alojamientos de la … · NACIMIENTO DE LA ROBOTICA...
79
Introducci Introducci ó ó n a la rob n a la rob ó ó tica (I) tica (I) J.C. Fraile J.C. Fraile - - ETSII ETSII - - Universidad de Valladolid Universidad de Valladolid Universidad de Valladolid Universidad de Valladolid E.T.S. de Ingenieros Industriales E.T.S. de Ingenieros Industriales Control y Programaci Control y Programaci ó ó n de Robots n de Robots
Transcript of Universidad de Valladolid - Albergue de alojamientos de la … · NACIMIENTO DE LA ROBOTICA...

IntroducciIntroduccióón a la robn a la robóótica (I)tica (I)
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
Universidad de ValladolidUniversidad de ValladolidE.T.S. de Ingenieros IndustrialesE.T.S. de Ingenieros Industriales
Control y ProgramaciControl y Programacióón de Robotsn de Robots
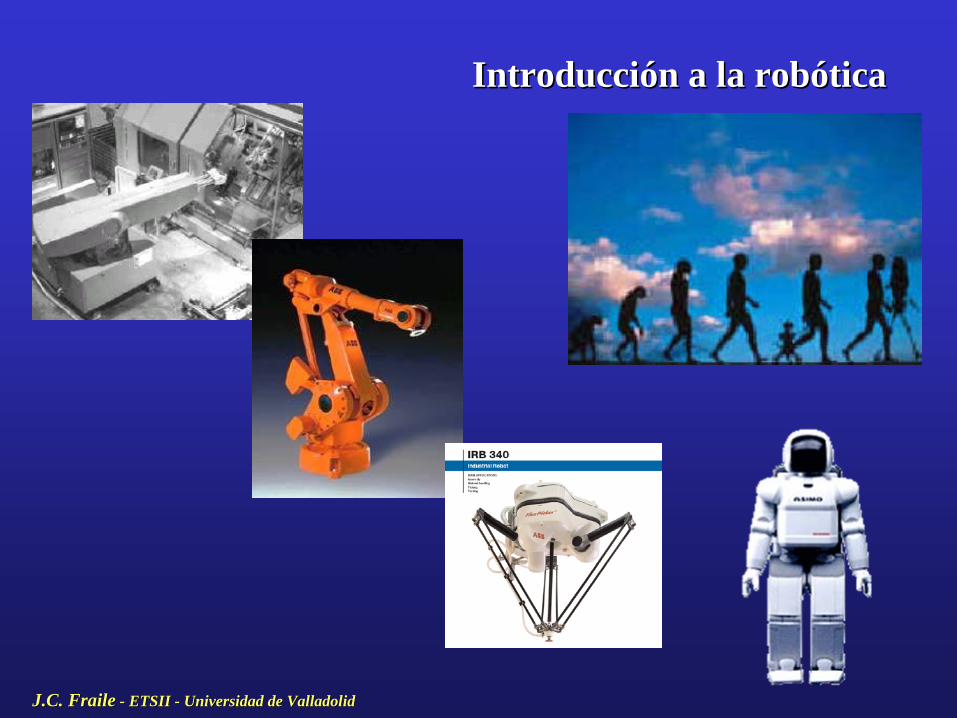
IntroducciIntroduccióón a la robn a la robóóticatica
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

ÍÍNDICE DE LA EXPOSICINDICE DE LA EXPOSICIÓÓNN
1.- Introducción2.- Antecedentes Históricos de los Robots3.- Nacimiento de la Robótica4.- Definición y Características de los Robots5.- Clasificación de los Robots
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

INDICE DE LA EXPOSICIONINDICE DE LA EXPOSICION
6.- Ventajas de los Robots7.- Grado de implantación de los Robots8.- Aportaciones de la Robótica9.- Estadísticas de implantación de Robots10.- Tendencias de la Robótica
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

IntroducciIntroduccióónn
Control
Informática
Mecánica
Electrónica
Matemáticas
Multidisciplinar
Robótica
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

ANTECEDENTES DE LOS ROBOTSANTECEDENTES DE LOS ROBOTS DESDE LOS GRIEGOS A LA EDAD MEDIA
En el año 400 A.C. el matemático y filósofo italiano Arquitas de Tarento (430 - 360 a.C.), hizo una paloma de madera que volaba. Suspendida de una cuerda, la paloma era hueca y tenía en su interior un depósito de agua. Esta agua se calentaba mediante una llama que había en la parte inferior del depósito. El vapor que se producía salía por unos pequeños orificios de la parte trasera del pájaro. La reacción de los chorros de vapor hacía mover al pájaro. Esta paloma de madera se considera la primera aplicación del principio físico de acción – reacción.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

ANTECEDENTES DE LOS ROBOTSANTECEDENTES DE LOS ROBOTS DESDE LOS GRIEGOS A LA EDAD MEDIA
El matemático y científico griego Herón de Alejandría (20 – 62 d.C.) construyó diversos autómatas con forma de ave. Se le atribuye la invención de la primera máquina de vapor, conocida como “aeolipile” y la fuente de Herón.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

ANTECEDENTES DE LOS ROBOTSANTECEDENTES DE LOS ROBOTS DESDE LOS GRIEGOS A LA EDAD MEDIA
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

EDAD MEDIA• El monje Alberto Magno (1204 – 1282) inventa y construye el
primer androide “el hombre de hierro”. Construido de hierro, cristal y cuero, era capaz de andar, atendía la puerta del monasterio, avisaba si había llegado alguien, se encargaba de entretener a los visitantes y además podía hacer tareas caseras.
• El franciscano Roger Bacon (1214 – 1294) profesor en Oxford, famoso filósofo y teólogo. Fabricó una cabeza parlante que le hizo sospechoso de hechicería o magia siendo llamado a capítulo por el general de los franciscanos.
• El gallo del reloj de la catedral Estrasburgo. (siglo XIV), funcionó desde 1352 hasta 1789. Es el autómata más antiguo que se conserva en la actualidad. Al dar las horas movía el pico y las alas.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

EDAD MEDIA
• El gallo del reloj de la catedral Estrasburgo. (siglo XIV), funcionó desde 1352 hasta 1789. Es el autómata más antiguo que se conserva en la actualidad. Al dar las horas movía el pico y las alas.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

EDAD MEDIA• Leonardo Da Vinci (1452-1519) construyó el león mecánico para
el rey Luís XII de Francia. Este autómata se abría el pecho con su garra y mostraba el escudo de armas del rey.
• “El hombre de palo” fue construido por Juanelo Turriano (1501 – 1585) para el emperador Carlos V. Este autómata tenía aspecto de monje, andaba y movía la cabeza, ojos boca y brazos. Recorría las calles pidiendo limosna para su dueño haciendo una reverencia cuando la conseguía.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

EDAD MEDIAEn los siglos XVII y XVIII, el gremio relojero en Europa desarrolló y construyó relojes que tenían autómatas con forma de muñecos. Estos eran capaces de escribir, dibujar y tocar melodías de órgano. Destaca el relojero suizo Pierre Jaquet Droz (1721-1790) que construyó “el dibujante”. Se trata de un autómata compuesto por unas 2.000 piezas. Representa la figura de un niño sentado en un pupitre que podía realizar hasta cuatro dibujos distintos. Imitaba el comportamiento humano mientras realiza la tarea de dibujo: mueve los ojos, las manos y sopla el papel para eliminar los restos del polvo del lápiz. Los cuatro dibujos que podía realizar el autómata eran un retrato de Luis XV, una pareja real, un perro y a cupido subido encima de una carroza tirado por una mariposa.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

EDAD MODERNA
Jacques de Vaucanson (1709-1782) construyó un pato mecánico que fue admirado en toda Europa. El pato tomaba alimentos, los tragaba, los digería . Los alimentos los digería por disolución, y a través de unos tubos interiores llegaban al ano, donde para evacuarlos.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

NACIMIENTO DE LA ROBOTICANACIMIENTO DE LA ROBOTICA Origen del término RobotRobot
• Karel Capek (1890-1938) acuña el término robot por primera vez en 1921, cuando estrena su obra “Rossum’s Universal robot” en Praga.
• Los robots eran máquinas androides. • Robot procede de robota (trabajo forzado).• Robot se generaliza gracias a las novelas de
ciencia-ficción, en espacial gracias a Isaac Asimov (1920-1992).
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Las tres leyes de la robLas tres leyes de la robóóticatica
Isaac Asimov publica en 1945 en la revista “Galaxy Science Fiction” una historia con las tres leyes de la tres leyes de la robrobóótica:tica:
•• Un robot no puede perjudicar a un ser humano, ni con Un robot no puede perjudicar a un ser humano, ni con su inaccisu inaccióón permitir que un ser humano sufra dan permitir que un ser humano sufra dañño.o.
•• Un robot ha de obedecer las Un robot ha de obedecer las óórdenes recibidas de un rdenes recibidas de un ser humano, excepto si tales ser humano, excepto si tales óórdenes entran en rdenes entran en conflicto con la primera ley.conflicto con la primera ley.
•• Un robot debe proteger su propia existencia mientras Un robot debe proteger su propia existencia mientras tal proteccital proteccióón no entre en conflicto con la primera o n no entre en conflicto con la primera o segunda ley. segunda ley.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Origen y desarrollo de la Robótica DECADA DE LOS 50
1954 - George C. Devol (USA 1912) diseña y patenta (patente USA nº 2.998.237), el “primer robot industrial programable” al que denomina “dispositivo de transferencia programada de artículos”. Devol afirmó que el robot industrial "ayudaría al trabajador de las fábricas del mismo modo en que las máquinas de ofimática habían ayudado al oficinista".
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
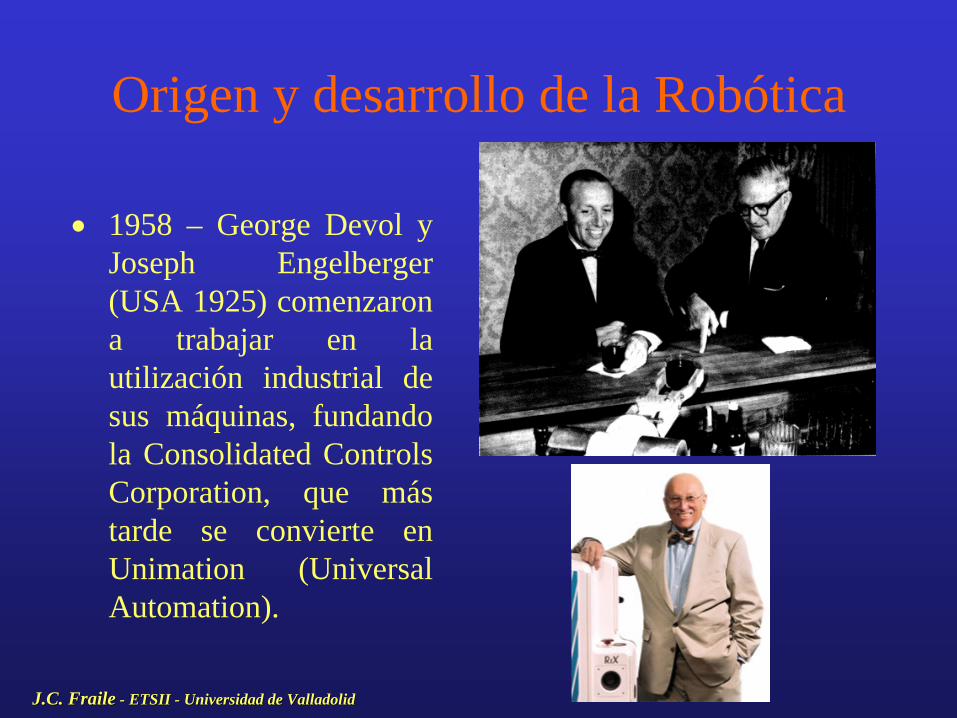
Origen y desarrollo de la Robótica
1958 – George Devol y Joseph Engelberger (USA 1925) comenzaron a trabajar en la utilización industrial de sus máquinas, fundando la Consolidated Controls Corporation, que más tarde se convierte en Unimation (Universal Automation).
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Origen y desarrollo de la Robótica DECADA DE LOS 50
1959 - Aparece el primer robot industrial comercial, conocido como "Unimate". Este robot estaba controlado por interruptores de fin de carrera y levas, y fue creado a partir del diseño de George Devol. Utiliza motores hidráulicos.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

DECADA DE LOS 60
1961 - Se instala el primer robot industrial “Unimate” en la fabrica de automóviles “General Motors”, en la localidad de Trenton (Nueva Jersey - USA). El robot se utilizó para una carga y descarga de piezas en una máquina de fundición por inyección.
J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid

DECADA DE LOS 60 - 70
• 1964 - Se crean los laboratorios de Inteligencia artificial en el MIT (Massachusetts Institute of Technology - USA), SRI (Standford Research Institute - USA) y Universidad de Edimburgo (Reino Unido).
• 1971 - La Universidad americana de Stanford crea un pequeño brazo robot con accionamiento eléctrico.
• 1972 – La empresa de automóviles Nissan crea la primera asociación de robótica del mundo: JIRA (Japanese Industrial Robot Association). Esto permitió un desarrollo espectacular de la robótica en Japón.
J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid

DECADA DE LOS 70
• 1973 - La empresa sueca ASEA construye el primer robot del mundo con accionamiento totalmente eléctrico, el robot IRB6.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Origen y desarrollo de la Robótica DECADA DE LOS 70
• 1974 - Se crea el Instituto de Robótica de América (RIA - Robotics Industries Association).
• 1974 - La empresa japonesa Kawasaki instala un robot para soldadura por arco para estructuras de motocicletas.
• 1974 – La empresa Cincinnati Milacron crea el robot T3 con control por computador.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

DECADA DE LOS 70
• 1975 - Will y David Grossman en IBM desarrollaron un manipulador controlado por computador que usaba sensores de contacto y fuerza para realizar montajes mecánicos en máquinas de escribir.
• A partir del año de 1975, la aplicación del microprocesador, transforma y mejora de forma radical el control de los robots.
• 1976 - La NASA hace uso en el espacio del primer brazo robot.
J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid
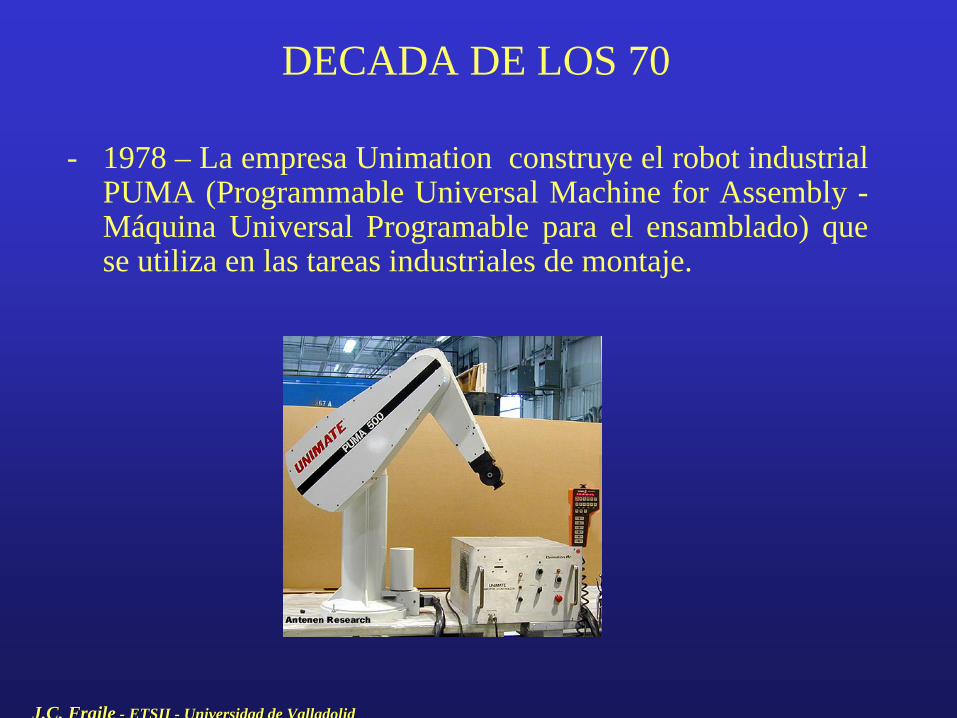
DECADA DE LOS 70
- 1978 – La empresa Unimation construye el robot industrial PUMA (Programmable Universal Machine for Assembly - Máquina Universal Programable para el ensamblado) que se utiliza en las tareas industriales de montaje.
J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid
DECADA DE LOS 80
• 1980 - Se funda la la Federación Internacional de Robótica “IFR” (International federation of robotics) con sede en Estocolmo (Suecia).
• 1982 – La empresa IBM crea el robot RS-1 para montaje. Se trata de un robot de estructura de caja que utiliza un brazo constituido por tres dispositivos de deslizamiento ortogonales.
J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid

DECADA DE LOS 80
- 1982 – El Profesor Hiroshi Makino de la Universidad Yamanashi de Japón, desarrolla y construye el primer robot SCARA (Selective Compliance Assembly Robot Arm). Se trata de un robot de 3-4 ejes, y una configuración orientada al ensamblado de piezas.
J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid
DECADA DE LOS 80 - 08
• 1985 – Se crea la “Asociación Española de Robótica” (AER). Es una organización sin ánimo de lucro que agrupa a los diferentes miembros o colectivos en los que reside gran parte del empuje y desarrollo de la Robótica y de la Automatización y Tecnologías de la Producción.
• En el periodo 1980 – 2008, el trabajo y la investigación en robótica, realizada por empresas y por universidades, se orienta al desarrollo de sensores para el robot, cada vez mas potentes, que permitan lograr un comportamiento “inteligente” del robot, para su integración en el entorno, y para poder tomar decisiones en tiempo real. También se construyen robots que utilizan accionamiento eléctrico y tienen capacidades de carga muy elevadas, pudiendo manipular piezas de alrededor de 500 kg.
J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid
DEFINICION DE ROBOTDEFINICION DE ROBOT
““Un robot programable es un manipulador Un robot programable es un manipulador multifuncional multifuncional reprogramablereprogramable, capaz de , capaz de
mover materiales, piezas, herramientas o mover materiales, piezas, herramientas o dispositivos especiales, segdispositivos especiales, segúún trayectorias n trayectorias variables, programadas para realizar tareas variables, programadas para realizar tareas
diversasdiversas””
AsociaciAsociacióón de Industrias Robn de Industrias Robóóticas (RIA)ticas (RIA)
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
““Por robot industrial se entiende a una mPor robot industrial se entiende a una mááquina de quina de manipulacimanipulacióón automn automáática, tica, reprogramablereprogramable y y
multifuncionalmultifuncional con tres o mcon tres o máás ejes que puedan s ejes que puedan posicionar y orientar materias, piezas, posicionar y orientar materias, piezas,
herramientas o dispositivos especiales para la herramientas o dispositivos especiales para la ejecuciejecucióón de trabajos diversos en las diferentes n de trabajos diversos en las diferentes
etapas de la produccietapas de la produccióón industrial, ya sea en una n industrial, ya sea en una posiciposicióón fija o en movimienton fija o en movimiento””
FederaciFederacióón Internacional de Robn Internacional de Robóótica (IFR)tica (IFR)J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

CLASIFICACION DE ROBOTSCLASIFICACION DE ROBOTS
•• 11ªª GeneraciGeneracióónn. Robots que repitene la tarea programada secuencialmente. No toma en cuenta las alteraciones de su entorno porque no hay dialogo con su entorno.
•• 22ªª GeneraciGeneracióónn Adquieren información limitada de su entorno y actúan en consecuencia. Pueden localizar, detectar piezas y esfuerzos y adaptar sus movimientos en consecuencia.
•• 33ªª GeneraciGeneracióónn Robots con programación mediante lenguaje natural. Poseen capacidad de planificación automática de tareas. Tienen ciertas capacidades “inteligentes”.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

CLASIFICACION SEGCLASIFICACION SEGÚÚN ARTICULACIONESN ARTICULACIONES
ROBOTS ANTROPOMÓRFICOS (6 g.d.l.)
ROBOTS SCARA(4 g.d.l.)
J C FraileJ C Fraile - ETSIIETSII - Universidad de ValladolidUniversidad de Valladolid

CLASIFICACION SEGCLASIFICACION SEGÚÚN ARTICULACIONESN ARTICULACIONES
ROBOTS CARTESIANOS
ROBOT CILÍNDRICO
J C FraileJ C Fraile - ETSIIETSII - Universidad de ValladolidUniversidad de Valladolid

CLASIFICACION SEGCLASIFICACION SEGÚÚN ARTICULACIONESN ARTICULACIONES
ROBOT POLAR O ESFÉRICO
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
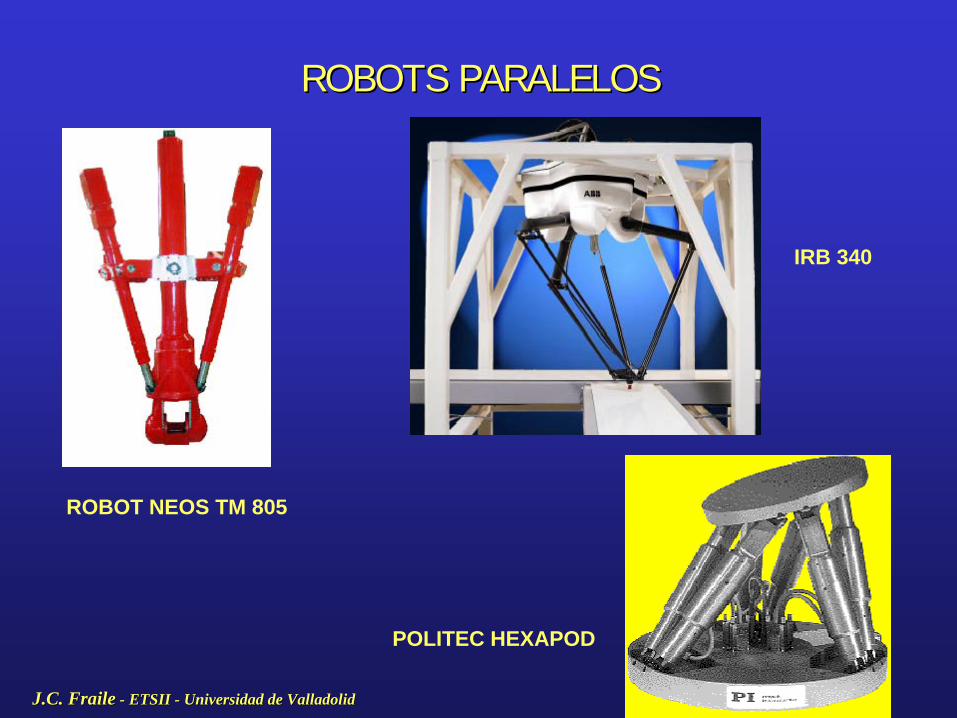
ROBOTS PARALELOSROBOTS PARALELOS
ROBOT NEOS TM 805
IRB 340
POLITEC HEXAPOD
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

HOMBRE HOMBRE ---- MANIPULADORMANIPULADOR
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

VENTAJAS DEL ROBOTVENTAJAS DEL ROBOT
• El robot supera al hombre en alcance, velocidad, capacidad de carga y precisión.
• No presenta problemas psicológicos por monotonía y cansancio. No se distrae, realiza las tareas siempre de la misma forma con lo que se obtiene una mayor calidad del producto.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
VENTAJAS DEL HOMBREVENTAJAS DEL HOMBRE
• El hombre supera al robot cuando la tarea a realizar es compleja.– Cuando es decisiva la visión tridimensional.– Cuando es decisivo el uso repetido del tacto.– Intervención de dos manos simultáneamente– Gran número de decisiones en un tiempo muy
corto
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

APORTACIONES DE LA ROBAPORTACIONES DE LA ROBÓÓTICATICA
• Aleja a las personas de las tareas insalubres, duras e incómodas.
• Alejar al trabajador de las tareas altamente peligrosas.• Supresión de innumerables tareas monótonas.• Mayor regularidad en cierto tipo de tareas.• Mayor flexibilidad para el cambio de tarea.• Mayor reutilización del equipo al cambiar el producto.• Aumento del ritmo de producción.• Aumento del número de horas de funcionamiento
del equipo.• Mejora de la calidad del producto
J C FraileJ C Fraile ETSIIETSII Universidad de ValladolidUniversidad de Valladolid

J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
www.worldrobotics.org
www.ifr.org

Fuente:
world roboticsJ.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Fuente: world roboticsJ.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Fuente: world roboticsJ.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Fuente: world roboticsJ.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Fuente: world roboticsJ.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
RobRobóótica Industrial: Estado Actual en Espatica Industrial: Estado Actual en Españñaa
Fuente: AER (Asociación Española de robótica)

J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
RobRobóótica Industrial: Estado Actual en Espatica Industrial: Estado Actual en Españñaa
Fuente: AER (Asociación Española de robótica)

J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
RobRobóótica Industrial: Estado Actual en Espatica Industrial: Estado Actual en Españñaa
Fuente: AER (Asociación Española de robótica)

J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
RobRobóótica Industrial: Estado Actual en Espatica Industrial: Estado Actual en Españñaa
Fuente: AER (Asociación Española de robótica)

J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
RobRobóótica Industrial: Estado Actual en Espatica Industrial: Estado Actual en Españñaa
(fuente: (fuente: www.aeratp.comwww.aeratp.com, a, añño 2008)o 2008)
40%
21%
15%
5%
5%
3% ABB KUKA
FANUC MOTOMAN
SEPRO WITTMAN
COMAU KAWASAKI
YAMAHA PANASONIC
STAUBLI REIS
ADEPT OTROS
Fuente: AER (Asociación Española de robótica)

Perspectivas y Tendencias Futuras
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Objetivos
• Mejora en desarrollo de productos dentro de las aplicaciones y sectores actuales
• Desarrollo de nuevos productos para implantación en nuevas aplicaciones
Medios
• Mejora de prestaciones funcionales
• Disminución de costes, tiempos y riesgos de Instalación
• Aumento de fiabilidad y disminución de costes de explotación
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Mejora de prestaciones funcionales:
• Desarrollo de nuevas arquitecturas
• Desarrollo de sistemas de movilidad
• Sensores y Sistemas de Percepción
• Teleoperación
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

• Búsqueda de nuevas arquitecturas
Velocidad Máxima: 10 m/s
Aceleración Máxima: 10 m/s2
ver video
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

• “Popularización” de los sistemas de Simulación
• Sensores y Sistemas de Percepción
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Utilización de un navegador de Internet para monitorización local o remota de uno o varios robots:
• Gestión y Control de Producción (explotación de estadísticas, programas de optimización de procesos, etc.)
• Monitorización de sistema para diagnóstico remoto de averías.
• Instalación remota de software, monitorización de estados de I/O, gestión de alarmas, modificación de variables de programa, etc.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

RobRobóótica de serviciostica de servicios
La IFR (International Federation of Robotics) ha elaborado la siguiente definición preliminar de "robot de servicios":
"Un robot que funciona de forma total o parcialmente autónoma para proporcionar servicios de utilidad del ser humano o en instalaciones y equipos, excluyendo las operaciones de fabricación"
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

RobRobóótica de serviciostica de servicios
Tipo de robotUnidadesInstaladas
(finales 1999)
Instalacionesprevistas
2000-2003
Robots de limpieza (tanques, fachadas, etc.) 400 700Robots de Inspección y mantenimiento General: plantas nucleares, puentes, etc. 100 150 Robots de inspección subacuática 900 200Robots Médicos (cirugía) 800 5000Sillas de ruedas robotizadas 200 200Plataformas robotizadas móviles (multiples usos) 500 400Robots de vigilancia y seguridad 50 250Robots Guía (p.e. en museos) 10 50Robots dispensadores de combustible 50 1200Robots para desactivación de explosivos 150 250Robots en la industria de construcciónRobots agrícolasRobots espacialesRobots en laboratorios 180 500Otros tipos 260 500
Total Unidades 3600 9400
Robots domésticos (no incluye "aspiradores") 3000 40000Robots "aspiradores" 270000
J C FraileJ C Fraile - ETSIIETSII - Universidad de ValladolidUniversidad de Valladolid

RobRobóótica de serviciostica de servicios
Tarea realizadaArea de Aplicación Inspección Mantenimiento preventivo Gestión de Incidentes
Industria Nuclear Area en crecimiento, muyligada a la introducción desistemas de mantenimientoremoto
Campo consolidado, convarias décadas deutilización satisfactoria desistemas robotizados.
Area de gran actividad:descontaminación,transporte de residuos, etc.
Líneas Ferroviarias Poco interés y escasaactividad
Area de aplicación habitualpero con poca actividadreciente
Escasa utilización
Distribución de electricidad Escasa utilización Interés creciente: sobretodo en el uso de robots entendidos de alta tensión
Area de mayor aplicaciónen la actualidad y con unademanda creciente debidoal interés en evitar riesgosa los operarios.
Aeronaves Crecimiento moderado porla introducción de técnicasde inspección automática
Crecimiento moderado: seaplican sobre todo enpintura y limpieza
Escasa aplicación
Subacuáticas En crecimiento durante lasdos últimas décadas conavances progresivos.
Importancia creciente:varios prototipos en fase dedesarrollo
Importancia creciente:varios prototipos en fase dedesarrollo
Robots de inspecciRobots de inspeccióón y mantenimienton y mantenimiento
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

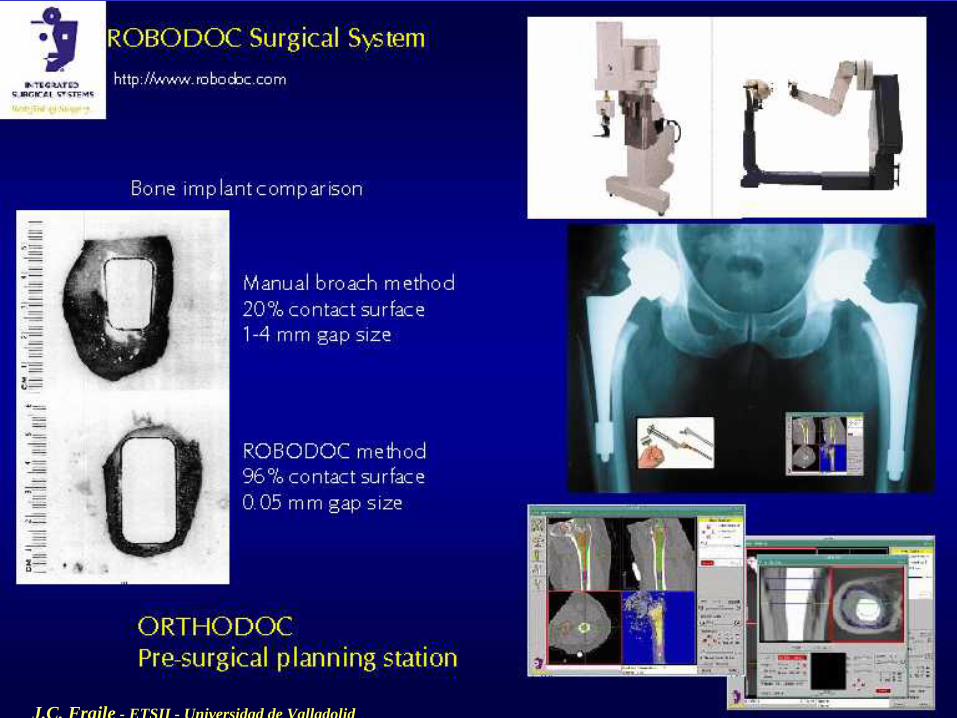
RobRobóótica de servicios: robots para cirugtica de servicios: robots para cirugííaa
.Robots Robots teleoperadosteleoperados para cirugpara cirugíía ma míínimamente invasivanimamente invasiva: el robot no es autónomo sino que es controlado indirectamente por el cirujano. Se utilizan sobre todo en operaciones laparoscópicas. La aplicación habitual es utilizarlo para mover una cámara endoscópica. Solo unos pocos se utilizan para manipular instrumentos quirúrgicos.
.Sistemas autSistemas autóónomosnomos: en la actualidad solo se utilizan para el fresado / conformado de la cabeza del fémur en las operaciones de prótesis de cadera y, recientemente, para intervenciones de rótula.
.Robots controlados de forma interactivaRobots controlados de forma interactiva: permiten restringir el volumen de trabajo y combinar movimientos programados con desplazamientos guiados por el cirujano. Se utilizan sobre todo para posicionar microscopios en operaciones de neurocirugía.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

J C FraileJ C Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid
J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid

RobRobóótica de serviciostica de servicios
HELPMATEHELPMATE
Robot correo diseñado para el transporte de materiales dentro de un hospital: documen-tación, comidas, radiografías, material de laboratorio y farmacéutico, etc. Incorpora diferentes sistemas sensoriales y de navegación en entornos semi-estructurados que le permiten llegar a su destino evitando obstáculos fijos o móviles.
Desarrollado por Helpmate Robotics (USA), con finan- ciación parcial del Advanced Technology Program del gobierno de EE.UU. Desde 1997 se han vendido o alqui-lado unas 100 unidades a hospitales en EE.U. y Canadá. Recientemente, Helpmate Robotics ha pasado a formar parte de Pyxis Corporation.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

RobRobóótica de serviciostica de servicios
FraunhoferFraunhofer IPA IPA TankroboterTankroboter
Desarrollado en colaboración con Aral AG, BMW AG, y Mercedes-Benz AG, permite establecer establecer una conexión estanca entre el surtidor y el depósito del vehí-culo. Este debe estar dotado de un identificador electró-nico que es leído por el robot. La posición exacta del coche se detecta mediante camaras.
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Robots HumanoidesRobots Humanoides
J C FraileJ C Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid
Robots HumanoidesRobots Humanoides
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Introducción
• Qué es un humanoide ?• Cómo aprenden ?• Para qué sirven ?:
– Ayuda a personas– Entretenimiento– Tareas domésticas y ¿¿en industrias??
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

•First humanoid modern robot built in the world was developed in 1973.
• It is named WABOT-1 for WasedaWaseda University in Japan.University in Japan.
• Able to communicate with person in Japanese.
• WABOT-1 was estimated has the mental faculty of a 1½ year old child
• It gives the skeleton to future humanoid robotics.
WABOTWABOT--1 (1970~1973)1 (1970~1973)
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

WABOTWABOT--2 (1980~1984)2 (1980~1984)
• WABOT-2 aimed to accomplish playing a keyboard instrument.
• It was defined as a “specialist robot” rather than a versatile robot.
• Able to converse with a person, read normal musical score with its eye.
• WABOT-2 was the first milestone in developing a “Personal robot”
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

WL75 WL10R WHL-11 Honda P2
Couple more examples of humanoid robotics…
Honda Asimo
Wabian
Honda P3
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid
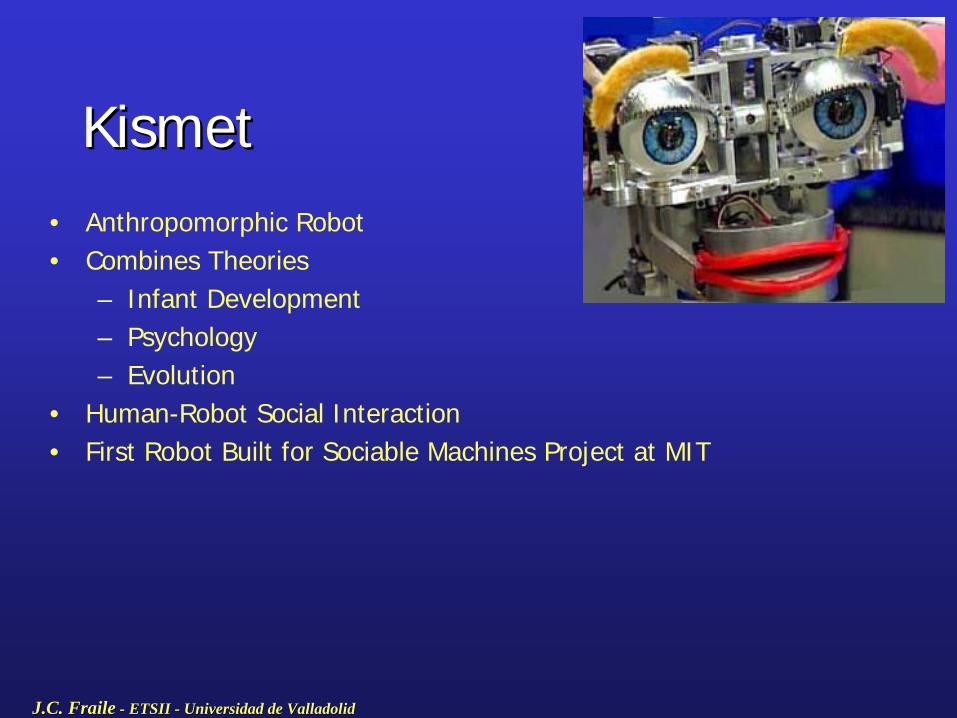
KismetKismet• Anthropomorphic Robot• Combines Theories
– Infant Development– Psychology – Evolution
• Human-Robot Social Interaction• First Robot Built for Sociable Machines Project at MIT
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Kismet: Social ExpressionsKismet: Social Expressions
J C FraileJ C Fraile - ETSIIETSII - Universidad de ValladolidUniversidad de Valladolid

MIT: CogMIT: Cog
• Structure• Only Upper Torso• Vision
• Incorporates all Humanoid Robotics• Mind
• Learning Systems
• Motor Skills• Social Interaction
J C FraileJ C Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid

Cog: Cog: ““MusclesMuscles””
• Biochemical Subsystem
• The idea of Muscles
• Movement Behind the system
• Greater Human Interaction
• What Cog “feels”
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

Future of Humanoid RoboticsFuture of Humanoid Robotics
• Today’s humanoid robotic development faces a greater challenges ever.
• More than two million industrial robots will be in use by 2003.
• Where’s the personal robot, which will someday mow the lawn, clean the house, and shampoo the carpets?
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

• Nowadays, robots performing many tasks that are difficult for human to achieve.
• However, none of the humanoids have essential use.
• Many experts believe although humanoid robotics will not reach its potential in this decade, a truly robotics are inevitable.
Pino
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid

• Personal robots are too expansive for consumers right now
• In the meantime, the next-generation technology robo sapiens are refined in the shapes of animals
Sony Aibo
Sony SDR- 4
J C FraileJ C Fraile ETSIIETSII U i id d d V ll d lidUniversidad de Valladolid

J.C. FraileJ.C. Fraile -- ETSIIETSII -- Universidad de ValladolidUniversidad de Valladolid

FINFIN
J.C. FraileJ.C. Fraile -- ETSII ETSII -- Universidad de ValladolidUniversidad de Valladolid