UCL AdM 20140303public - mathematik.hu-berlin.de
111
What can have a 3-sphere as its boundary, and why should you ask Isaac Newton? Σ ∼ = S 3 Chris Wendl University College London Talk for the UCL AdM Maths Society, 3rd March, 2014 Slides available at: http://www.homepages.ucl.ac.uk/~ucahcwe/publications.html#talks
Transcript of UCL AdM 20140303public - mathematik.hu-berlin.de

What can have a 3-sphere as its
boundary, and why should you ask Isaac
Newton?
Σ ∼= S3
Chris Wendl
University College London
Talk for the UCL AdM Maths Society, 3rd March, 2014
Slides available at:
http://www.homepages.ucl.ac.uk/~ucahcwe/publications.html#talks

PART 1: Differential topology
The n-dimensional sphere
Sn :={x ∈ R
n+1 | x21 + . . . x2n+1 = 1}
= boundary of the (n+1)-dimensional ball
Bn+1 :={x ∈ R
n+1 | x21 + . . . x2n+1 ≤ 1}.
S1 = ∂B2x1
x2
S2 = ∂B3x1
x2
x3
1

Question: What other (n + 1)-dimensional
objects can have Sn as boundary?Some surfa es � with �� = S1:PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MDe�nitionSuppose M � RN is a subset, U �M is open.An n-dimensional oordinate hart on U is aset of fun tions x1; : : : ; xn : U ! R su h thatthe mapping(x1; : : : ; xn) : U ! Rnis bije tive onto some open subset of Rn.
2

Question: What other (n + 1)-dimensional
objects can have Sn as boundary?
Some surfaces Σ with ∂Σ = S1:
replacements
De�nitionSuppose M � RN is a subset, U �M is open.An n-dimensional oordinate hart on U is aset of fun tions x1; : : : ; xn : U ! R su h thatthe mapping(x1; : : : ; xn) : U ! Rnis bije tive onto some open subset of Rn.2

Question: What other (n + 1)-dimensional
objects can have Sn as boundary?
Some surfaces Σ with ∂Σ = S1:
replacements
De�nitionSuppose M � RN is a subset, U �M is open.An n-dimensional oordinate hart on U is aset of fun tions x1; : : : ; xn : U ! R su h thatthe mapping(x1; : : : ; xn) : U ! Rnis bije tive onto some open subset of Rn.2

Question: What other (n + 1)-dimensional
objects can have Sn as boundary?
Some surfaces Σ with ∂Σ = S1:
replacements
De�nitionSuppose M � RN is a subset, U �M is open.An n-dimensional oordinate hart on U is aset of fun tions x1; : : : ; xn : U ! R su h thatthe mapping(x1; : : : ; xn) : U ! Rnis bije tive onto some open subset of Rn.2

Question: What other (n + 1)-dimensional
objects can have Sn as boundary?
Some surfaces Σ with ∂Σ = S1:
replacements
De�nitionSuppose M � RN is a subset, U �M is open.An n-dimensional oordinate hart on U is aset of fun tions x1; : : : ; xn : U ! R su h thatthe mapping(x1; : : : ; xn) : U ! Rnis bije tive onto some open subset of Rn.2

Question: What other (n + 1)-dimensional
objects can have Sn as boundary?
Some surfaces Σ with ∂Σ = S1:
replacements
De�nitionSuppose M � RN is a subset, U �M is open.An n-dimensional oordinate hart on U is aset of fun tions x1; : : : ; xn : U ! R su h thatthe mapping(x1; : : : ; xn) : U ! Rnis bije tive onto some open subset of Rn.2

Question: What other (n + 1)-dimensional
objects can have Sn as boundary?
Some surfaces Σ with ∂Σ = S1:
replacements
Definition
Suppose M ⊂ RN is a subset, U ⊂ M is open.
An n-dimensional coordinate chart on U is a
set of functions x1, . . . , xn : U → R such that
the mapping
(x1, . . . , xn) : U → Rn
is bijective onto some open subset of Rn.
2

M is a (smooth, n-dimensional) manifold if:
� Every point p 2M is ontained in an opensubset U �M admitting an n-dimensional oordinate hart;� Wherever two oordinate harts overlap,the resulting oordinate transformationmaps are in�nitely di�erentiable.Two manifolds M and M 0 are di�eomorphi (M �=M 0) if there exists a bije tionf :M !M 0su h that both f and f�1 are everywhere in-�nitely di�erentiable when expressed in oor-dinate harts.M is ompa t if it is a losed and boundedsubset of RN . (Equivalently: every sequen ein M has a onvergent subsequen e!)PropositionIf M �= M 0, then they have the same dimen-sion, and M ompa t , M 0 ompa t.
3

M is a (smooth, n-dimensional) manifold if:
• Every point p ∈ M is contained in an open
subset U ⊂ M admitting an n-dimensional
coordinate chart;� Wherever two oordinate harts overlap,the resulting oordinate transformationmaps are in�nitely di�erentiable.Two manifolds M and M 0 are di�eomorphi (M �=M 0) if there exists a bije tionf :M !M 0su h that both f and f�1 are everywhere in-�nitely di�erentiable when expressed in oor-dinate harts.M is ompa t if it is a losed and boundedsubset of RN . (Equivalently: every sequen ein M has a onvergent subsequen e!)PropositionIf M �= M 0, then they have the same dimen-sion, and M ompa t , M 0 ompa t.
3

M is a (smooth, n-dimensional) manifold if:
• Every point p ∈ M is contained in an open
subset U ⊂ M admitting an n-dimensional
coordinate chart;
• Wherever two coordinate charts overlap,
the resulting coordinate transformation
maps are infinitely differentiable.
Two manifolds M and M 0 are di�eomorphi (M �=M 0) if there exists a bije tionf :M !M 0su h that both f and f�1 are everywhere in-�nitely di�erentiable when expressed in oor-dinate harts.M is ompa t if it is a losed and boundedsubset of RN . (Equivalently: every sequen ein M has a onvergent subsequen e!)PropositionIf M �= M 0, then they have the same dimen-sion, and M ompa t , M 0 ompa t.3

M is a (smooth, n-dimensional) manifold if:
• Every point p ∈ M is contained in an open
subset U ⊂ M admitting an n-dimensional
coordinate chart;
• Wherever two coordinate charts overlap,
the resulting coordinate transformation
maps are infinitely differentiable.
Two manifolds M and M ′ are diffeomorphic
(M ∼= M ′) if there exists a bijection
f : M → M ′
such that both f and f−1 are everywhere in-
finitely differentiable when expressed in coor-
dinate charts.M is ompa t if it is a losed and boundedsubset of RN . (Equivalently: every sequen ein M has a onvergent subsequen e!)PropositionIf M �= M 0, then they have the same dimen-sion, and M ompa t , M 0 ompa t.3

M is a (smooth, n-dimensional) manifold if:
• Every point p ∈ M is contained in an open
subset U ⊂ M admitting an n-dimensional
coordinate chart;
• Wherever two coordinate charts overlap,
the resulting coordinate transformation
maps are infinitely differentiable.
Two manifolds M and M ′ are diffeomorphic
(M ∼= M ′) if there exists a bijection
f : M → M ′
such that both f and f−1 are everywhere in-
finitely differentiable when expressed in coor-
dinate charts.
M is compact if it is a closed and bounded
subset of RN . (Equivalently: every sequen ein M has a onvergent subsequen e!)PropositionIf M �= M 0, then they have the same dimen-sion, and M ompa t , M 0 ompa t.3

M is a (smooth, n-dimensional) manifold if:
• Every point p ∈ M is contained in an open
subset U ⊂ M admitting an n-dimensional
coordinate chart;
• Wherever two coordinate charts overlap,
the resulting coordinate transformation
maps are infinitely differentiable.
Two manifolds M and M ′ are diffeomorphic
(M ∼= M ′) if there exists a bijection
f : M → M ′
such that both f and f−1 are everywhere in-
finitely differentiable when expressed in coor-
dinate charts.
M is compact if it is a closed and bounded
subset of RN . (Equivalently: every sequence
in M has a convergent subsequence!)PropositionIf M �= M 0, then they have the same dimen-sion, and M ompa t , M 0 ompa t.3

M is a (smooth, n-dimensional) manifold if:
• Every point p ∈ M is contained in an open
subset U ⊂ M admitting an n-dimensional
coordinate chart;
• Wherever two coordinate charts overlap,
the resulting coordinate transformation
maps are infinitely differentiable.
Two manifolds M and M ′ are diffeomorphic
(M ∼= M ′) if there exists a bijection
f : M → M ′
such that both f and f−1 are everywhere in-
finitely differentiable when expressed in coor-
dinate charts.
M is compact if it is a closed and bounded
subset of RN . (Equivalently: every sequence
in M has a convergent subsequence!)
Proposition
If M ∼= M ′, then they have the same dimen-
sion, and M compact ⇔ M ′ compact.
3

Some examples of manifolds
• Rn (dimension = n)� C = fx+ iy j x; y 2 Rg �= R2� Cn �= R2n (dimension = 2n)� Spheres Sn and balls Bn (dimension = n)( ompa t)� Surfa es of genus g (dimension = 2)( ompa t)� Various matrix groups (\Lie groups"):{ GL(n;R) = fA 2 Rn�n j A invertibleg(dimension = n2){ SL(n;R) = fA 2 GL(n;R) j detA= 1g(dimension = n2 � 1){ O(n) = fA 2 GL(n;R) j ATA = Ig(dimension = n(n+1)=2) ( ompa t)� The universe?(dimension = 4? 10? 11?) ( ompa t?)4

Some examples of manifolds
• Rn (dimension = n)
• C = {x+ iy | x, y ∈ R} ∼= R2� Cn �= R2n (dimension = 2n)� Spheres Sn and balls Bn (dimension = n)( ompa t)� Surfa es of genus g (dimension = 2)( ompa t)� Various matrix groups (\Lie groups"):{ GL(n;R) = fA 2 Rn�n j A invertibleg(dimension = n2){ SL(n;R) = fA 2 GL(n;R) j detA= 1g(dimension = n2 � 1){ O(n) = fA 2 GL(n;R) j ATA = Ig(dimension = n(n+1)=2) ( ompa t)� The universe?(dimension = 4? 10? 11?) ( ompa t?)4

Some examples of manifolds
• Rn (dimension = n)
• C = {x+ iy | x, y ∈ R} ∼= R2
• Cn ∼= R2n (dimension = 2n)� Spheres Sn and balls Bn (dimension = n)( ompa t)� Surfa es of genus g (dimension = 2)( ompa t)� Various matrix groups (\Lie groups"):{ GL(n;R) = fA 2 Rn�n j A invertibleg(dimension = n2){ SL(n;R) = fA 2 GL(n;R) j detA= 1g(dimension = n2 � 1){ O(n) = fA 2 GL(n;R) j ATA = Ig(dimension = n(n+1)=2) ( ompa t)� The universe?(dimension = 4? 10? 11?) ( ompa t?)4

Some examples of manifolds
• Rn (dimension = n)
• C = {x+ iy | x, y ∈ R} ∼= R2
• Cn ∼= R2n (dimension = 2n)
• Spheres Sn and balls Bn (dimension = n)
(compact)� Surfa es of genus g (dimension = 2)( ompa t)� Various matrix groups (\Lie groups"):{ GL(n;R) = fA 2 Rn�n j A invertibleg(dimension = n2){ SL(n;R) = fA 2 GL(n;R) j detA= 1g(dimension = n2 � 1){ O(n) = fA 2 GL(n;R) j ATA = Ig(dimension = n(n+1)=2) ( ompa t)� The universe?(dimension = 4? 10? 11?) ( ompa t?)4

Some examples of manifolds
• Rn (dimension = n)
• C = {x+ iy | x, y ∈ R} ∼= R2
• Cn ∼= R2n (dimension = 2n)
• Spheres Sn and balls Bn (dimension = n)
(compact)
• Surfaces of genus g (dimension = 2)
(compact)� Various matrix groups (\Lie groups"):{ GL(n;R) = fA 2 Rn�n j A invertibleg(dimension = n2){ SL(n;R) = fA 2 GL(n;R) j detA= 1g(dimension = n2 � 1){ O(n) = fA 2 GL(n;R) j ATA = Ig(dimension = n(n+1)=2) ( ompa t)� The universe?(dimension = 4? 10? 11?) ( ompa t?)4

Some examples of manifolds
• Rn (dimension = n)
• C = {x+ iy | x, y ∈ R} ∼= R2
• Cn ∼= R2n (dimension = 2n)
• Spheres Sn and balls Bn (dimension = n)
(compact)
• Surfaces of genus g (dimension = 2)
(compact)
• Various matrix groups (“Lie groups”):
– GL(n,R) = {A ∈ Rn×n | A invertible}
(dimension = n2){ SL(n;R) = fA 2 GL(n;R) j detA= 1g(dimension = n2 � 1){ O(n) = fA 2 GL(n;R) j ATA = Ig(dimension = n(n+1)=2) ( ompa t)� The universe?(dimension = 4? 10? 11?) ( ompa t?)4

Some examples of manifolds
• Rn (dimension = n)
• C = {x+ iy | x, y ∈ R} ∼= R2
• Cn ∼= R2n (dimension = 2n)
• Spheres Sn and balls Bn (dimension = n)
(compact)
• Surfaces of genus g (dimension = 2)
(compact)
• Various matrix groups (“Lie groups”):
– GL(n,R) = {A ∈ Rn×n | A invertible}
(dimension = n2)
– SL(n,R) = {A ∈ GL(n,R) | detA = 1}
(dimension = n2 − 1){ O(n) = fA 2 GL(n;R) j ATA = Ig(dimension = n(n+1)=2) ( ompa t)� The universe?(dimension = 4? 10? 11?) ( ompa t?)4

Some examples of manifolds
• Rn (dimension = n)
• C = {x+ iy | x, y ∈ R} ∼= R2
• Cn ∼= R2n (dimension = 2n)
• Spheres Sn and balls Bn (dimension = n)
(compact)
• Surfaces of genus g (dimension = 2)
(compact)
• Various matrix groups (“Lie groups”):
– GL(n,R) = {A ∈ Rn×n | A invertible}
(dimension = n2)
– SL(n,R) = {A ∈ GL(n,R) | detA = 1}
(dimension = n2 − 1)
– O(n) = {A ∈ GL(n,R) | ATA = 1}
(dimension = n(n+1)/2) (compact)� The universe?(dimension = 4? 10? 11?) ( ompa t?)4

Some examples of manifolds
• Rn (dimension = n)
• C = {x+ iy | x, y ∈ R} ∼= R2
• Cn ∼= R2n (dimension = 2n)
• Spheres Sn and balls Bn (dimension = n)
(compact)
• Surfaces of genus g (dimension = 2)
(compact)
• Various matrix groups (“Lie groups”):
– GL(n,R) = {A ∈ Rn×n | A invertible}
(dimension = n2)
– SL(n,R) = {A ∈ GL(n,R) | detA = 1}
(dimension = n2 − 1)
– O(n) = {A ∈ GL(n,R) | ATA = 1}
(dimension = n(n+1)/2) (compact)
• The universe?
(dimension = 4? 10? 11?) (compact?)
4

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?Answer: Almost any!Let M = any ompa t (n+1)-manifold with-out boundary, pi k a point p 2 M and a o-ordinate hart on some open set U 3 p su hthat p has oordinates (0; : : : ;0) 2 Rn+1. Thenfor � > 0 small, de�neM := M nB�(p);whereB�(p) := nx21+ : : :+ x2n+1 � �o � U :
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MNow �M = fx21+ : : :+ x2n+1 = �g �= Sn.Con lusion: We asked the wrong question.The answer was too easy!5

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?
Answer: Almost any!Let M = any ompa t (n+1)-manifold with-out boundary, pi k a point p 2 M and a o-ordinate hart on some open set U 3 p su hthat p has oordinates (0; : : : ;0) 2 Rn+1. Thenfor � > 0 small, de�neM := M nB�(p);whereB�(p) := nx21+ : : :+ x2n+1 � �o � U :
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MNow �M = fx21+ : : :+ x2n+1 = �g �= Sn.Con lusion: We asked the wrong question.The answer was too easy!5

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?
Answer: Almost any!
Let M = any compact (n+1)-manifold with-
out boundary, pi k a point p 2 M and a o-ordinate hart on some open set U 3 p su hthat p has oordinates (0; : : : ;0) 2 Rn+1. Thenfor � > 0 small, de�neM := M nB�(p);whereB�(p) := nx21+ : : :+ x2n+1 � �o � U :
Now �M = fx21+ : : :+ x2n+1 = �g �= Sn.Con lusion: We asked the wrong question.The answer was too easy!5

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?
Answer: Almost any!
Let M = any compact (n+1)-manifold with-
out boundary, pick a point p ∈ M and a o-ordinate hart on some open set U 3 p su hthat p has oordinates (0; : : : ;0) 2 Rn+1. Thenfor � > 0 small, de�neM := M nB�(p);whereB�(p) := nx21+ : : :+ x2n+1 � �o � U :p
Now �M = fx21+ : : :+ x2n+1 = �g �= Sn.Con lusion: We asked the wrong question.The answer was too easy!5

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?
Answer: Almost any!
Let M = any compact (n+1)-manifold with-
out boundary, pick a point p ∈ M and a
coordinate chart on some open set U ∋ p
such that p has coordinates (0, . . . ,0) ∈ Rn+1.Then for � > 0 small, de�neM := M nB�(p);whereB�(p) := nx21+ : : :+ x2n+1 � �o � U :p
Now �M = fx21+ : : :+ x2n+1 = �g �= Sn.Con lusion: We asked the wrong question.The answer was too easy!5

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?
Answer: Almost any!
Let M = any compact (n+1)-manifold with-
out boundary, pick a point p ∈ M and a
coordinate chart on some open set U ∋ p
such that p has coordinates (0, . . . ,0) ∈ Rn+1.
Then for ǫ > 0 small, define
M := M \Bǫ(p),
where
Bǫ(p) :={x21 + . . .+ x2n+1 ≤ ǫ
}⊂ U .
p
Now �M = fx21+ : : :+ x2n+1 = �g �= Sn.Con lusion: We asked the wrong question.The answer was too easy!5

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?
Answer: Almost any!
Let M = any compact (n+1)-manifold with-
out boundary, pick a point p ∈ M and a
coordinate chart on some open set U ∋ p
such that p has coordinates (0, . . . ,0) ∈ Rn+1.
Then for ǫ > 0 small, define
M := M \Bǫ(p),
where
Bǫ(p) :={x21 + . . .+ x2n+1 ≤ ǫ
}⊂ U .
Bǫ(p)
Now �M = fx21+ : : :+ x2n+1 = �g �= Sn.Con lusion: We asked the wrong question.The answer was too easy!5

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?
Answer: Almost any!
Let M = any compact (n+1)-manifold with-
out boundary, pick a point p ∈ M and a
coordinate chart on some open set U ∋ p
such that p has coordinates (0, . . . ,0) ∈ Rn+1.
Then for ǫ > 0 small, define
M := M \Bǫ(p),
where
Bǫ(p) :={x21 + . . .+ x2n+1 ≤ ǫ
}⊂ U .
S1
Now ∂M = {x21 + . . .+ x2n+1 = ǫ} ∼= Sn.Con lusion: We asked the wrong question.The answer was too easy!5

More precise question: What kinds of com-
pact (n+1)-manifolds M can have ∂M ∼= Sn?
Answer: Almost any!
Let M = any compact (n+1)-manifold with-
out boundary, pick a point p ∈ M and a
coordinate chart on some open set U ∋ p
such that p has coordinates (0, . . . ,0) ∈ Rn+1.
Then for ǫ > 0 small, define
M := M \Bǫ(p),
where
Bǫ(p) :={x21 + . . .+ x2n+1 ≤ ǫ
}⊂ U .
S1
Now ∂M = {x21 + . . .+ x2n+1 = ǫ} ∼= Sn.
Conclusion: We asked the wrong question.
The answer was too easy!
5

PART 2: Dynamics
Newton (18th century):
A system of particles moving with n degrees
of freedom is described by a path in Rn,
q(t) := (q1(t), . . . , qn(t)) ∈ Rn.If the system is onservative, its for es arederived from a potential fun tion V (q) byF(q) = �rV (q).Then Newton's se ond law givesmj�qj = ���V�qj�;a system of n se ond-order ordinary di�eren-tial equations (ODE). Its total energyE = nXj=1 �12�mj _q2j + V (q)is onserved, i.e. �dEdt �= 0.
6

PART 2: Dynamics
Newton (18th century):
A system of particles moving with n degrees
of freedom is described by a path in Rn,
q(t) := (q1(t), . . . , qn(t)) ∈ Rn.
If the system is conservative, its forces are
derived from a potential function V (q) by
F(q) = −∇V (q).
Then Newton’s second law gives
mj qj = −∂V
∂qj,a system of n se ond-order ordinary di�eren-tial equations (ODE). Its total energyE = nXj=1 �12�mj _q2j + V (q)is onserved, i.e. �dEdt �= 0.
6

PART 2: Dynamics
Newton (18th century):
A system of particles moving with n degrees
of freedom is described by a path in Rn,
q(t) := (q1(t), . . . , qn(t)) ∈ Rn.
If the system is conservative, its forces are
derived from a potential function V (q) by
F(q) = −∇V (q).
Then Newton’s second law gives
mj qj = −∂V
∂qj,
a system of n second-order ordinary differen-
tial equations (ODE). Its total energyE = nXj=1 �12�mj _q2j + V (q)is onserved, i.e. �dEdt �= 0.6

PART 2: Dynamics
Newton (18th century):
A system of particles moving with n degrees
of freedom is described by a path in Rn,
q(t) := (q1(t), . . . , qn(t)) ∈ Rn.
If the system is conservative, its forces are
derived from a potential function V (q) by
F(q) = −∇V (q).
Then Newton’s second law gives
mj qj = −∂V
∂qj,
a system of n second-order ordinary differen-
tial equations (ODE). Its total energy
E =n∑
j=1
1
2mj q
2j + V (q)
is conserved, i.e. dEdt = 0.
6

Hamilton (19th century):
Pretend qi and pj := mj qj (momentum) are
independent variables moving in the “phase
space” R2n. The total energy de�nes theHamiltonian fun tion:H : R2n ! R : (q; p) 7! nXj=1 � p2j2mj�+ V (q);and Newton's se ond-order system be omesHamilton's (�rst-order!) equations:_qj = ��H�pj�; _pj = ���H�qj�; j = 1; : : : ; n: (�)Idea: To study motion of systems satisfy-ing onstraints, we an treat (q; p) as lo al oordinates of a point moving in a manifold.
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4M7

Hamilton (19th century):
Pretend qi and pj := mj qj (momentum) are
independent variables moving in the “phase
space” R2n. The total energy defines the
Hamiltonian function:
H : R2n → R : (q,p) 7→n∑
j=1
p2j
2mj+ V (q),
and Newton’s second-order system becomes
Hamilton’s (first-order!) equations:
qj =∂H
∂pj, pj = −
∂H
∂qj, j = 1, . . . , n. (∗)Idea: To study motion of systems satisfy-ing onstraints, we an treat (q; p) as lo al oordinates of a point moving in a manifold.
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4M7

Hamilton (19th century):
Pretend qi and pj := mj qj (momentum) are
independent variables moving in the “phase
space” R2n. The total energy defines the
Hamiltonian function:
H : R2n → R : (q,p) 7→n∑
j=1
p2j
2mj+ V (q),
and Newton’s second-order system becomes
Hamilton’s (first-order!) equations:
qj =∂H
∂pj, pj = −
∂H
∂qj, j = 1, . . . , n. (∗)
Idea: To study motion of systems satisfy-
ing constraints, we can treat (q,p) as local
coordinates of a point moving in a manifold.
7

qj =∂H
∂pj, pj = −
∂H
∂qj(∗)
Complication: A system that satisfies (∗)
for one particular choice of coordinates might
not satisfy it for all other choices.De�nitionA 2n-dimensional manifold M has a symple -ti stru ture if it is overed by spe ial oordi-nate harts of the form (q1; : : : ; qn; p1; : : : ; pn)su h that for any smooth fun tion H : M !R, all oordinate transformations preserve theform of Hamilton's equations (�).Exer ise: A transformation on R2 preserves (�), it is area and orientation preserving.Simple examples� Symple ti : R2n, all orientable surfa es� Not symple ti : S2n for n > 1( an prove using de Rham ohomology)
8

qj =∂H
∂pj, pj = −
∂H
∂qj(∗)
Complication: A system that satisfies (∗)
for one particular choice of coordinates might
not satisfy it for all other choices.
Definition
A 2n-dimensional manifold M has a symplec-
tic structure if it is covered by special coordi-
nate charts of the form (q1, . . . , qn, p1, . . . , pn)
such that for any smooth function H : M →
R, all coordinate transformations preserve the
form of Hamilton’s equations (∗).Exer ise: A transformation on R2 preserves (�), it is area and orientation preserving.Simple examples� Symple ti : R2n, all orientable surfa es� Not symple ti : S2n for n > 1( an prove using de Rham ohomology)
8

qj =∂H
∂pj, pj = −
∂H
∂qj(∗)
Complication: A system that satisfies (∗)
for one particular choice of coordinates might
not satisfy it for all other choices.
Definition
A 2n-dimensional manifold M has a symplec-
tic structure if it is covered by special coordi-
nate charts of the form (q1, . . . , qn, p1, . . . , pn)
such that for any smooth function H : M →
R, all coordinate transformations preserve the
form of Hamilton’s equations (∗).
Exercise: A transformation on R2 preserves (∗)
⇔ it is area and orientation preserving.Simple examples� Symple ti : R2n, all orientable surfa es� Not symple ti : S2n for n > 1( an prove using de Rham ohomology)
8

qj =∂H
∂pj, pj = −
∂H
∂qj(∗)
Complication: A system that satisfies (∗)
for one particular choice of coordinates might
not satisfy it for all other choices.
Definition
A 2n-dimensional manifold M has a symplec-
tic structure if it is covered by special coordi-
nate charts of the form (q1, . . . , qn, p1, . . . , pn)
such that for any smooth function H : M →
R, all coordinate transformations preserve the
form of Hamilton’s equations (∗).
Exercise: A transformation on R2 preserves (∗)
⇔ it is area and orientation preserving.
Simple examples
• Symplectic: R2n, all orientable surfaces� Not symple ti : S2n for n > 1( an prove using de Rham ohomology)8

qj =∂H
∂pj, pj = −
∂H
∂qj(∗)
Complication: A system that satisfies (∗)
for one particular choice of coordinates might
not satisfy it for all other choices.
Definition
A 2n-dimensional manifold M has a symplec-
tic structure if it is covered by special coordi-
nate charts of the form (q1, . . . , qn, p1, . . . , pn)
such that for any smooth function H : M →
R, all coordinate transformations preserve the
form of Hamilton’s equations (∗).
Exercise: A transformation on R2 preserves (∗)
⇔ it is area and orientation preserving.
Simple examples
• Symplectic: R2n, all orientable surfaces
• Not symplectic: S2n for n > 1
(can prove using de Rham cohomology)
8

Assume M is symplectic, H : M → R a smoothfunction. Then any path γ : R → M satisfyingHamilton’s equations “conserves energy”:
d
dtH(γ(t)) = 0,) orbits are on�ned to level sets H�1( ).Question: Given H : M ! R and , mustthere exist a periodi orbit in H�1( )?Theorem (Rabinowitz-Weinstein '78)Given H : R2n ! R, any star-shaped levelset H�1( ) � R2n admits a periodi orbit.PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4M
9

Assume M is symplectic, H : M → R a smoothfunction. Then any path γ : R → M satisfyingHamilton’s equations “conserves energy”:
d
dtH(γ(t)) = 0,
⇒ orbits are confined to level sets H−1(c).Question: Given H : M ! R and , mustthere exist a periodi orbit in H�1( )?Theorem (Rabinowitz-Weinstein '78)Given H : R2n ! R, any star-shaped levelset H�1( ) � R2n admits a periodi orbit.PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4M9

Assume M is symplectic, H : M → R a smoothfunction. Then any path γ : R → M satisfyingHamilton’s equations “conserves energy”:
d
dtH(γ(t)) = 0,
⇒ orbits are confined to level sets H−1(c).
Question: Given H : M → R and c, mustthere exist a periodic orbit in H−1(c)?Theorem (Rabinowitz-Weinstein '78)Given H : R2n ! R, any star-shaped levelset H�1( ) � R2n admits a periodi orbit.PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4M
9

Assume M is symplectic, H : M → R a smoothfunction. Then any path γ : R → M satisfyingHamilton’s equations “conserves energy”:
d
dtH(γ(t)) = 0,
⇒ orbits are confined to level sets H−1(c).
Question: Given H : M → R and c, mustthere exist a periodic orbit in H−1(c)?
Theorem (Rabinowitz-Weinstein ’78)Given H : R2n → R, any star-shaped levelset H−1(c) ⊂ R2n admits a periodic orbit.
9

Assume M is symplectic, H : M → R a smoothfunction. Then any path γ : R → M satisfyingHamilton’s equations “conserves energy”:
d
dtH(γ(t)) = 0,
⇒ orbits are confined to level sets H−1(c).
Question: Given H : M → R and c, mustthere exist a periodic orbit in H−1(c)?
Theorem (Rabinowitz-Weinstein ’78)Given H : R2n → R, any star-shaped levelset H−1(c) ⊂ R2n admits a periodic orbit.
9

Assume M is symplectic, H : M → R a smoothfunction. Then any path γ : R → M satisfyingHamilton’s equations “conserves energy”:
d
dtH(γ(t)) = 0,
⇒ orbits are confined to level sets H−1(c).
Question: Given H : M → R and c, mustthere exist a periodic orbit in H−1(c)?
Theorem (Rabinowitz-Weinstein ’78)Given H : R2n → R, any star-shaped levelset H−1(c) ⊂ R2n admits a periodic orbit.
9

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.A hypersurfa e N �M is a submanifold withdimN = dimM � 1.A hypersurfa e N � R2n is star-shaped if itinterse ts every ray from the origin exa tlyon e, transversely.Exer iseAny star-shaped hypersurfa e in R2n is dif-feomorphi to S2n�1.10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.A hypersurfa e N � R2n is star-shaped if itinterse ts every ray from the origin exa tlyon e, transversely.Exer iseAny star-shaped hypersurfa e in R2n is dif-feomorphi to S2n�1.10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.
A hypersurface N ⊂ R2n is star-shaped if it
intersects every ray from the origin exactly
once, transversely.Exer iseAny star-shaped hypersurfa e in R2n is dif-feomorphi to S2n�1.10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.
A hypersurface N ⊂ R2n is star-shaped if it
intersects every ray from the origin exactly
once, transversely.
Exercise
Any star-shaped hypersurface in R2n is dif-
feomorphic to S2n−1.
10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.
A hypersurface N ⊂ R2n is star-shaped if it
intersects every ray from the origin exactly
once, transversely.
Exercise
Any star-shaped hypersurface in R2n is dif-
feomorphic to S2n−1.
10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.
A hypersurface N ⊂ R2n is star-shaped if it
intersects every ray from the origin exactly
once, transversely.
Exercise
Any star-shaped hypersurface in R2n is dif-
feomorphic to S2n−1.
10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.
A hypersurface N ⊂ R2n is star-shaped if it
intersects every ray from the origin exactly
once, transversely.
Exercise
Any star-shaped hypersurface in R2n is dif-
feomorphic to S2n−1.
10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.
A hypersurface N ⊂ R2n is star-shaped if it
intersects every ray from the origin exactly
once, transversely.
Exercise
Any star-shaped hypersurface in R2n is dif-
feomorphic to S2n−1.
10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.
A hypersurface N ⊂ R2n is star-shaped if it
intersects every ray from the origin exactly
once, transversely.
Exercise
Any star-shaped hypersurface in R2n is dif-
feomorphic to S2n−1.
10

Definitions
A submanifold N of a manifold M is a subset
N ⊂ M such that the natural inclusion map
N → M is infinitely differentiable.
A hypersurface N ⊂ M is a submanifold with
dimN = dimM − 1.
A hypersurface N ⊂ R2n is star-shaped if it
intersects every ray from the origin exactly
once, transversely.
Exercise
Any star-shaped hypersurface in R2n is dif-
feomorphic to S2n−1.
10

PART 3: Symplectic topology
In 1985, Mikhail Gromov
published a paper called
Pseudoholomorphic curves
in symplectic manifolds.Among other remarkableresults, it proved:Our main theoremSuppose M is a ompa t 4-manifold withan exa t symple ti stru ture whi h, at itsboundary, looks like a star-shaped hypersur-fa e in R4. Then M �= B4.A generalisation to all dimensions � 4 waspublished in 1991, due to
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MYashaEliashberg
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MAndreasFloer
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MDusaM Du�11

PART 3: Symplectic topology
In 1985, Mikhail Gromov
published a paper called
Pseudoholomorphic curves
in symplectic manifolds.
Among other remarkable
results, it proved:
Our main theorem
Suppose M is a compact 4-manifold withan exact symplectic structure which, at itsboundary, looks like a star-shaped hypersur-face in R4. Then M ∼= B4.A generalisation to all dimensions � 4 waspublished in 1991, due to
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MYashaEliashberg
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MAndreasFloer
PSfrag repla ements� �= S3S2 = �B3S1 = �B2x1x2x3pB�(p)S1uwvw�B4MDusaM Du�11

PART 3: Symplectic topology
In 1985, Mikhail Gromov
published a paper called
Pseudoholomorphic curves
in symplectic manifolds.
Among other remarkable
results, it proved:
Our main theorem
Suppose M is a compact 4-manifold withan exact symplectic structure which, at itsboundary, looks like a star-shaped hypersur-face in R4. Then M ∼= B4.
A generalisation to all dimensions ≥ 4 waspublished in 1991, due to
Yasha
Eliashberg
AndreasFloer DusaM Du�11

PART 3: Symplectic topology
In 1985, Mikhail Gromov
published a paper called
Pseudoholomorphic curves
in symplectic manifolds.
Among other remarkable
results, it proved:
Our main theorem
Suppose M is a compact 4-manifold withan exact symplectic structure which, at itsboundary, looks like a star-shaped hypersur-face in R4. Then M ∼= B4.
A generalisation to all dimensions ≥ 4 waspublished in 1991, due to
Yasha
Eliashberg
Andreas
Floer
DusaM Du�11

PART 3: Symplectic topology
In 1985, Mikhail Gromov
published a paper called
Pseudoholomorphic curves
in symplectic manifolds.
Among other remarkable
results, it proved:
Our main theorem
Suppose M is a compact 4-manifold withan exact symplectic structure which, at itsboundary, looks like a star-shaped hypersur-face in R4. Then M ∼= B4.
A generalisation to all dimensions ≥ 4 waspublished in 1991, due to
Yasha
Eliashberg
Andreas
Floer
Dusa
McDuff11

Some preparation from complex analysis
A function f = u + iv : C → C is analytic /
holomorphic if it satisfies the Cauchy-Riemann
equations:
∂su(s+ it) = ∂tv(s+ it),
∂tu(s+ it) = −∂sv(s+ it).
Equivalently: �sf + i �tf = 0 : (��)A map f : C ! Cn satisfying this equation is alled a holomorphi urve in Cn.A 2n-dimensional manifold M has a omplexstru ture if it is overed by spe ial ( omplex) oordinate harts of the form (z1; : : : ; zn) :U ! Cn su h that all oordinate transfor-mations preserve the form of the Cau hy-Riemann equation (��).Thus one an speak of holomorphi urvesin any omplex manifold.Examples: Cn, SL(n;C), C [ f1g �= S212

Some preparation from complex analysis
A function f = u + iv : C → C is analytic /
holomorphic if it satisfies the Cauchy-Riemann
equations:
∂su(s+ it) = ∂tv(s+ it),
∂tu(s+ it) = −∂sv(s+ it).
Equivalently: ∂sf + i ∂tf = 0 . (∗∗)
A map f : C → Cn satisfying this equation is
called a holomorphic curve in Cn.A 2n-dimensional manifold M has a omplexstru ture if it is overed by spe ial ( omplex) oordinate harts of the form (z1; : : : ; zn) :U ! Cn su h that all oordinate transfor-mations preserve the form of the Cau hy-Riemann equation (��).Thus one an speak of holomorphi urvesin any omplex manifold.Examples: Cn, SL(n;C), C [ f1g �= S212

Some preparation from complex analysis
A function f = u + iv : C → C is analytic /
holomorphic if it satisfies the Cauchy-Riemann
equations:
∂su(s+ it) = ∂tv(s+ it),
∂tu(s+ it) = −∂sv(s+ it).
Equivalently: ∂sf + i ∂tf = 0 . (∗∗)
A map f : C → Cn satisfying this equation is
called a holomorphic curve in Cn.
A 2n-dimensional manifold M has a complex
structure if it is covered by special (complex)
coordinate charts of the form (z1, . . . , zn) :
U → Cn such that all coordinate transfor-
mations preserve the form of the Cauchy-
Riemann equation (∗∗).
Thus one can speak of holomorphic curves
in any complex manifold.Examples: Cn, SL(n;C), C [ f1g �= S212

Some preparation from complex analysis
A function f = u + iv : C → C is analytic /
holomorphic if it satisfies the Cauchy-Riemann
equations:
∂su(s+ it) = ∂tv(s+ it),
∂tu(s+ it) = −∂sv(s+ it).
Equivalently: ∂sf + i ∂tf = 0 . (∗∗)
A map f : C → Cn satisfying this equation is
called a holomorphic curve in Cn.
A 2n-dimensional manifold M has a complex
structure if it is covered by special (complex)
coordinate charts of the form (z1, . . . , zn) :
U → Cn such that all coordinate transfor-
mations preserve the form of the Cauchy-
Riemann equation (∗∗).
Thus one can speak of holomorphic curves
in any complex manifold.
Examples: Cn, SL(n;C), C [ f1g �= S212

Some preparation from complex analysis
A function f = u + iv : C → C is analytic /
holomorphic if it satisfies the Cauchy-Riemann
equations:
∂su(s+ it) = ∂tv(s+ it),
∂tu(s+ it) = −∂sv(s+ it).
Equivalently: ∂sf + i ∂tf = 0 . (∗∗)
A map f : C → Cn satisfying this equation is
called a holomorphic curve in Cn.
A 2n-dimensional manifold M has a complex
structure if it is covered by special (complex)
coordinate charts of the form (z1, . . . , zn) :
U → Cn such that all coordinate transfor-
mations preserve the form of the Cauchy-
Riemann equation (∗∗).
Thus one can speak of holomorphic curves
in any complex manifold.
Examples: Cn, SL(n,C), C [ f1g �= S212

Some preparation from complex analysis
A function f = u + iv : C → C is analytic /
holomorphic if it satisfies the Cauchy-Riemann
equations:
∂su(s+ it) = ∂tv(s+ it),
∂tu(s+ it) = −∂sv(s+ it).
Equivalently: ∂sf + i ∂tf = 0 . (∗∗)
A map f : C → Cn satisfying this equation is
called a holomorphic curve in Cn.
A 2n-dimensional manifold M has a complex
structure if it is covered by special (complex)
coordinate charts of the form (z1, . . . , zn) :
U → Cn such that all coordinate transfor-
mations preserve the form of the Cauchy-
Riemann equation (∗∗).
Thus one can speak of holomorphic curves
in any complex manifold.
Examples: Cn, SL(n,C), C ∪ {∞} ∼= S2
12

Unfortunately, symplectic manifolds are not
always complex, so one cannot generally make
sense of holomorphic curves in them.The next best thing. . .An almost omplex stru ture on Cn is a smoothfun tionJ : Cn ! freal-linear maps Cn ! Cng �= R2n�2nsu h that for all p 2 Cn, [J(p)℄2 = �1.A map f : C ! Cn is then alled a pseudo-holomorphi urve if it satis�es the nonlinearCau hy-Riemann equation:�sf + J(f) �tf = 0 : (� � �)This is a nonlinear �rst-order ellipti partialdi�erential equation (PDE).Fundamental lemma:Every symple ti manifold admits a spe ial lass of ompatible almost omplex stru -tures.13

Unfortunately, symplectic manifolds are not
always complex, so one cannot generally make
sense of holomorphic curves in them.
The next best thing. . .
An almost complex structure on Cn is a smooth
function
J : Cn → {real-linear maps Cn → C
n} ∼= R2n×2n
such that for all p ∈ Cn, [J(p)]2 = −1.A map f : C ! Cn is then alled a pseudo-holomorphi urve if it satis�es the nonlinearCau hy-Riemann equation:�sf + J(f) �tf = 0 : (� � �)This is a nonlinear �rst-order ellipti partialdi�erential equation (PDE).Fundamental lemma:Every symple ti manifold admits a spe ial lass of ompatible almost omplex stru -tures.13

Unfortunately, symplectic manifolds are not
always complex, so one cannot generally make
sense of holomorphic curves in them.
The next best thing. . .
An almost complex structure on Cn is a smooth
function
J : Cn → {real-linear maps Cn → C
n} ∼= R2n×2n
such that for all p ∈ Cn, [J(p)]2 = −1.
A map f : C → Cn is then called a pseudo-
holomorphic curve if it satisfies the nonlinear
Cauchy-Riemann equation:
∂sf + J(f) ∂tf = 0 . (∗ ∗ ∗)
This is a nonlinear first-order elliptic partial
differential equation (PDE).Fundamental lemma:Every symple ti manifold admits a spe ial lass of ompatible almost omplex stru -tures.13

Unfortunately, symplectic manifolds are not
always complex, so one cannot generally make
sense of holomorphic curves in them.
The next best thing. . .
An almost complex structure on Cn is a smooth
function
J : Cn → {real-linear maps Cn → C
n} ∼= R2n×2n
such that for all p ∈ Cn, [J(p)]2 = −1.
A map f : C → Cn is then called a pseudo-
holomorphic curve if it satisfies the nonlinear
Cauchy-Riemann equation:
∂sf + J(f) ∂tf = 0 . (∗ ∗ ∗)
This is a nonlinear first-order elliptic partial
differential equation (PDE).
Fundamental lemma:
Every symplectic manifold admits a special
class of compatible almost complex struc-
tures.
13

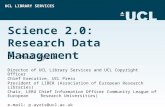
A decomposition of the standard B4 ⊂ R4
Identify R4 = C2 and define
J0(p) := i for all p ∈ R4.
We now see two obvious 2-dimensional fam-
ilies of pseudoholomorphic curves:
uw : C → C2 : z 7→ (z, w) for w ∈ C,
vw : C → C2 : z 7→ (w, z) for w ∈ C.
They form two transverse foliations of C2:
uw
vw
∂B4
14

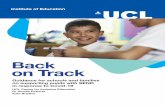
Proof of the main theorem
Given ∂M = Σ ⊂ R4 star-shaped, construct
a symplectic manifold W by surgery :
(1) Remove from R4 = C2 the interior of Σ;
(2) Attach M along its boundary to Σ.
Σ ∼= S3
uw
vw
∂B4
M
Choose J mat hing J0 outside a large ball.Then for large jwj, the pseudoholomorphi urves uw and vw also exist in W .15

Proof of the main theorem
Given ∂M = Σ ⊂ R4 star-shaped, construct
a symplectic manifold W by surgery :
(1) Remove from R4 = C2 the interior of Σ;
(2) Attach M along its boundary to Σ.
Σ ∼= S3
uw
vw
∂B4
M
Choose J matching J0 outside a large ball.
Then for large |w|, the pseudoholomorphic
curves uw and vw also exist in W .
15

Let Mu and Mv denote the families of pseu-
doholomorphic curves in W containing the
curves uw and vw respectively. Using fun -tional analysis and PDE theory, one an show:Lemma 1 (smoothness):One an hoose J su h that Mu and Mvare ea h parametrized by smooth, oriented 2-dimensional manifolds, and within ea h fam-ily, any two distin t urves are disjoint. More-over, every urve inMu interse ts every urvein Mv exa tly on e, transversely.Lemma 2 ( ompa tness):Any bounded sequen e of urves in Mu orMv has a onvergent subsequen e.These lemmas on ern general properties ofsolution spa es.One an prove them without knowing how tosolve the PDE, and without knowing whatMa tually is!16

Let Mu and Mv denote the families of pseu-
doholomorphic curves in W containing the
curves uw and vw respectively. Using func-
tional analysis and PDE theory, one can show:
Lemma 1 (smoothness):
One can choose J such that Mu and Mv
are each parametrized by smooth, oriented 2-
dimensional manifolds, and within each fam-
ily, any two distinct curves are disjoint. More-
over, every curve in Mu intersects every curve
in Mv exactly once, transversely.Lemma 2 ( ompa tness):Any bounded sequen e of urves in Mu orMv has a onvergent subsequen e.These lemmas on ern general properties ofsolution spa es.One an prove them without knowing how tosolve the PDE, and without knowing whatMa tually is!16

Let Mu and Mv denote the families of pseu-
doholomorphic curves in W containing the
curves uw and vw respectively. Using func-
tional analysis and PDE theory, one can show:
Lemma 1 (smoothness):
One can choose J such that Mu and Mv
are each parametrized by smooth, oriented 2-
dimensional manifolds, and within each fam-
ily, any two distinct curves are disjoint. More-
over, every curve in Mu intersects every curve
in Mv exactly once, transversely.
Lemma 2 (compactness):
Any bounded sequence of curves in Mu or
Mv has a convergent subsequence.These lemmas on ern general properties ofsolution spa es.One an prove them without knowing how tosolve the PDE, and without knowing whatMa tually is!16

Let Mu and Mv denote the families of pseu-
doholomorphic curves in W containing the
curves uw and vw respectively. Using func-
tional analysis and PDE theory, one can show:
Lemma 1 (smoothness):
One can choose J such that Mu and Mv
are each parametrized by smooth, oriented 2-
dimensional manifolds, and within each fam-
ily, any two distinct curves are disjoint. More-
over, every curve in Mu intersects every curve
in Mv exactly once, transversely.
Lemma 2 (compactness):
Any bounded sequence of curves in Mu or
Mv has a convergent subsequence.
These lemmas concern general properties of
solution spaces.
One can prove them without knowing how to
solve the PDE, and without knowing what M
actually is!
16

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
Σ ∼= S3
uw
vw
∂B4
M
) W �= C2.17

Final step: “turn on the machine. . . ”
uw
vw
∂B4
⇒ W ∼= C2.
17

That was nearly 30 years ago.
Here is a more recent but similar result. . .
Theorem (W. 2010)
The only exact symplectic fillings of a 3-
dimensional torus
T3 := S1 × S1 × S1
are star-shaped domains in the cotangent bun-
dle of T2.
Question:
For a surface Σ of genus g ≥ 2, does the unit
cotangent bundle have more than one exact
symplectic filling?
No one has any idea.
18